
Inverse Kinematics Data Adaptation to Non-Standard Modular Robotic Arm Consisting of Unique Rotational Modules


 , ,
, ,  ,
,
Abstract
1. Introduction
2. Model Creation and Data Processing
2.1. Modeling in CoppeliaSim Edu
2.2. Modeling in Matlab
2.3. The Problem of a Sudden Change in Data Continuity and Its Solution in Matlab
2.4. Composing a Repolarize
- To maintain the original trajectory, the initial values should not be skewed, i.e., if possible, they should not be averaged or approximated;
- There should be no phase shift of the initial values, as is the case with many filters.
2.5. Modeling in SolidWorks
3. Results
- (a)
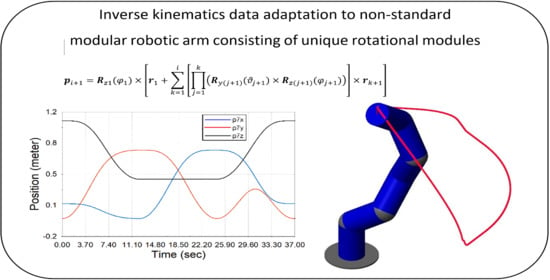
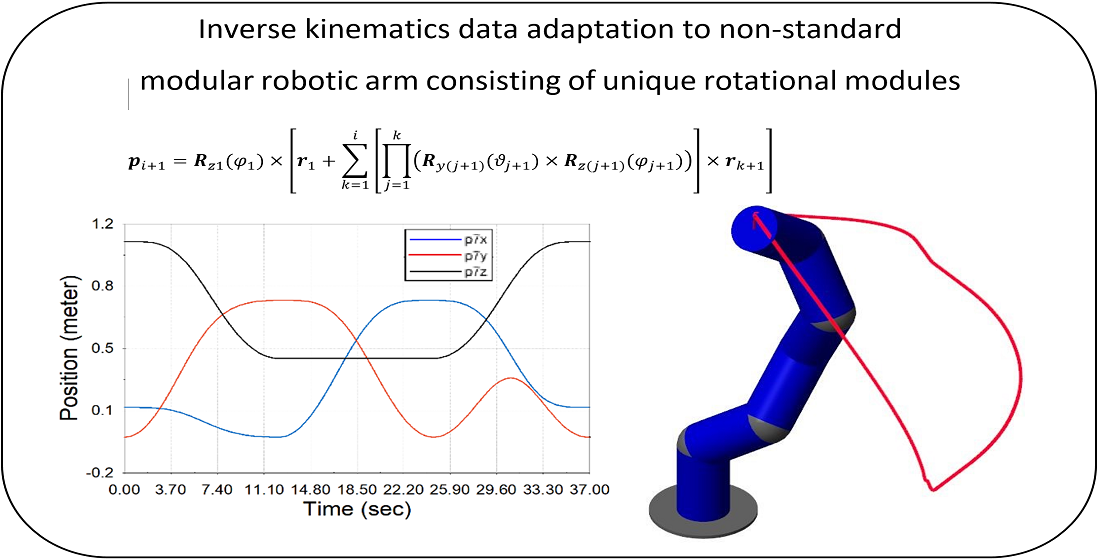
- The position determined by the position vector p7 = [p7x, p7y, p7z]T depending on the joint coordinate vector φ(t);
- (b)
- The speed determined by the velocity vector v7 = [v7x, v7y, v7z]T depending on the first derivation (time-bound) of the joint coordinate vector φ′(t);
- (c)
- The acceleration determined by the acceleration vector a7 = [a7x, a7y, a7z]T depending on the second derivation (time-bound) of the joint coordinate vector φ″(t) and (φ′(t))2;
- (d)
- The orientation determined by the Euler’s angles according to the [γ, β, α] option, depending on the joint coordinate vector φ(t).
- (a)
- The position determined by the position vector p7 = [p7x, p7y, p7z]T depending on the joint coordinate vector φ(t);
- (b)
- The speed determined by the velocity vector v7 = [v7x, v7y, v7z]T depending on the first derivation (time-bound) joint coordinate vector φ′(t).
4. Discussion
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| pi | Position vector between the reference coordinate system |
| S1{O1, x1, y1, z1} and the coordinate system Si{Oi, xi, yi, zi} | |
| ri | Vector quantifying a kinematic chain segment |
| φi | Angle of rotation around the zi axis of the Si{Oi, xi, yi, zi} system, joint coordinate |
| φ | Joint coordinate vector |
| ϑi | Angle of rotation around the yi axis of the Si{Oi, xi, yi, zi} system |
| Ryi | Rotation matrix for the transformation of the rotational movement around the yi axis |
| Rzi | Rotation matrix for the transformation of the rotational movement around the zi axis |
| RZYX(i+1) | Rotation matrix for calculating Euler’s angles α, β, γ |
| T | Sampling period |
| δ | A half period of the sampling period |
| tr | Instant time of repolarization |
| t | Time |
| Δ | Vector difference between the p7 position vector effector’s position and the position of the As{xAs, yAs, zAs} points that make up the trajectory |
| vi | Instantaneous velocity vector to the {Oi, xi, yi, zi} system |
| ai | Instantaneous acceleration vector to the {Oi, xi, yi, zi} system |
References
- Svetlík, J.; Štofa, M.; Pituk, M. Prototype development of a unique serial kinematic structure of modular configuration. MM Sci. J. 2016, 994–998. [Google Scholar] [CrossRef]
- Svetlík, J. Contribution to Construction of Manufacturing Engineering on Flexible Architecture Basis. Habilitation Thesis, Technical University of Košice, Košice, Slovakia, 14 June 2012. [Google Scholar]
- Štofa, M. Experimentálny vývoj rotačných modulov pre stavbu sériových kinematických štruktúr vo výrobnej technike. Ph.D. Thesis, Technical University of Košice, Košice, Slovakia, 30 January 2020. [Google Scholar]
- Gershenson, J.K.; Prasad, G.J. Modularity in product design for manufacturability. Int. J. Agile Manuf. 1997, 3, 99–110. [Google Scholar]
- Benderbal, H.H.; Dahane, M.; Benyoucef, L. Modularity assessment in reconfigurable manufacturing system (RMS) design: An Archived Multi-Objective Simulated Annealing-based approach. Int. J. Adv. Manuf. Technol. 2018, 94, 729–749. [Google Scholar] [CrossRef]
- Pérez, R.; Aca, J.; Valverde, A. A modularity framework for concurrent design of reconfigurable machine tools. In Proceedings of the International Conference on Cooperative Design, Visualization and Engineering, Heidelberg, Germany, 19–22 September 2004; Springer: Berlin, Germany, 2004. [Google Scholar]
- Svetlík, J. Modularity of Production Systems. In Machine Tools; Šooš, Ľ., Marek, J., Eds.; IntechOpen: London, UK, 2020; pp. 1–22. [Google Scholar]
- Yim, M.; Duff, D.G.; Roufas, K.D. PolyBot: A modular reconfigurable robot. In Proceedings of the ICRA ’00, IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 514–520. [Google Scholar]
- Yim, M.; Roufas, K.; Duff, D.; Zhang, Y.; Eldershaw, C.; Homans, S. Modular reconfigurable robots in space applications. Auton. Robot. 2003, 14, 225–237. [Google Scholar] [CrossRef]
- Acaccia, G.; Bruzzone, L.; Razzoli, R. A modular robotic system for industrial applications. Assem. Autom. 2008, 28, 151–162. [Google Scholar] [CrossRef]
- Xu, W.; Han, L.; Wang, X.; Yuan, H. A wireless reconfigurable modular manipulator and its control system. Mechatron. 2021, 73, 102470. [Google Scholar] [CrossRef]
- Pacaiova, H.; Isiarikova, G. Base Principles and Practices for Implementation of Total Productive Maintenance in Automotive Industry. Qual. Innov. Prosper. 2019, 23, 45–59. [Google Scholar] [CrossRef]
- Nikitin, Y.; Bozek, P.; Peterka, J. Logical–linguistic model of diagnostics of electric drives with sensors support. Sensors 2020, 20, 4429. [Google Scholar] [CrossRef] [PubMed]
- Paden, B. Kinematics and Control Robot Manipulators. Ph.D. Thesis, University of California, Berkeley, CA, USA, 1986. [Google Scholar]
- Kahan, W. Lectures on Computational Aspects of Geometry; Department of Electrical Engineering and Computer Sciences, University of California: Berkeley, CA, USA, 1983; Unpublished. [Google Scholar]
- Buss, S.R. Introduction to inverse kinematics with jacobian transpose, pseudoinverse and damped least squares methods. IEEE J. Robot. Autom. 2004, 16, 1–19. [Google Scholar]
- Dulęba, I.; Opałka, M. A comparison of Jacobian-based methods of inverse kinematics for serial robot manipulators. Int. J. Appl. Math. Comput. Sci. 2013, 23, 373–382. [Google Scholar] [CrossRef]
- Meredith, M.; Maddock, S. Real-Time Inverse Kinematics: The Return of the Jacobian; Technical Report No. CS-04-06; Department of Computer Science, University of Sheffield: Sheffield, UK, 2004. [Google Scholar]
- Šoch, M.; Lórencz, R. Solving inverse kinematics—A new approach to the extended Jacobian technique. Acta Polytech. 2005, 45, 21–26. [Google Scholar]
- Virgala, I.; Gmiterko, A.; Surovec, R.; Vacková, M.; Prada, E.; Kenderová, M. Manipulator end-effector position control. Procedia Eng. 2012, 48, 684–692. [Google Scholar] [CrossRef][Green Version]
- Virgala, I.; Tomáš, L.; Miková, Ľ. Snake robot locomotion patterns for straight and curved pipe. J. Mech. Eng. 2018, 68, 91–104. [Google Scholar] [CrossRef]
- Nilsson, R. Inverse Kinematics. Master’s Thesis, Luleå University of Technology, Luleå, Sweden, 2009. [Google Scholar]
- Wampler, C.W. Manipulator inverse kinematic solutions based on vector formulations and damped least-squares methods. IEEE Trans. Syst. Man, Cybern. 1986, 16, 93–101. [Google Scholar] [CrossRef]
- Lozhkin, A.; Bozek, P.; Maiorov, K. The method of high accuracy calculation of robot trajectory for the complex curves. Manag. Syst. Prod. Eng. 2020, 28, 247–252. [Google Scholar] [CrossRef]
- Ondočko, Š.; Stejskal, T.; Svetlík, J.; Hrivniak, L.; Šašala, L. Direct kinematics of modular system. In Automatizácia a riadenie v teórii a praxi 2020, Proceedings of the 14. ročník konferencie odborníkov z univerzít, vysokých škôl a praxe, Stará Lesná, Slovensko, 5–7 February 2020; Šeminský, J., Mižáková, J., Šimšík, J., Balog, M., Eds.; Technická Univerzita v Košiciach: Košice, Slovakia, 2020. [Google Scholar]
- Ondočko, Š.; Stejskal, T.; Svetlík, J.; Hrivniak, L.; Šašala, L.; Žilinský, A. Position forward kinematics of 6-DOF robotic arm. Acta Mech. Slovaca. (under review).
- Murray, R.; Li, Z.; Shankar, S. A Mathematical Introduction to Robotic Manipulation, 1st ed.; CRC Press: Boca Raton, FL, USA, 2017; p. 519. ISBN 9781315136370. [Google Scholar]
- Rate Limiter. Available online: https://www.mathworks.com/help/simulink/slref/ratelimiter.html?s_tid=srchtitle (accessed on 29 October 2020).
- How to Remove Unwanted Short Time Signal Simulink. Available online: https://stackoverflow.com/questions/52384093/how-to-remove-unwanted-short-time-signal-simulink/52409614 (accessed on 29 October 2020).
- Filtering and Smoothing Data. Available online: https://www.mathworks.com/help/curvefit/smoothing-data.html (accessed on 29 October 2020).
- Signal Smoothing. Available online: https://www.mathworks.com/help/signal/ug/signal-smoothing.html (accessed on 29 October 2020).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Diameters | (mm) | Diameters | (mm) | Diameters | (mm) |
|---|---|---|---|---|---|
| r1 | 243.215 | a1 | 73 | b1 | 128 |
| r2 | 212.430 | a2 | 42.215 | b2 | 128 |
| r3 | 212.430 | a3 | 42.215 | b3 | 128 |
| r4 | 212.430 | a4 | 42.215 | b4 | 128 |
| r5 | 212.430 | a5 | 42.215 | b5 | 128 |
| r6 | 212.430 | a6 | 42.215 | b6 | 128 |
| r7 | 42.215 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ondočko, Š.; Svetlík, J.; Šašala, M.; Bobovský, Z.; Stejskal, T.; Dobránsky, J.; Demeč, P.; Hrivniak, L. Inverse Kinematics Data Adaptation to Non-Standard Modular Robotic Arm Consisting of Unique Rotational Modules. Appl. Sci. 2021, 11, 1203. https://doi.org/10.3390/app11031203
Ondočko Š, Svetlík J, Šašala M, Bobovský Z, Stejskal T, Dobránsky J, Demeč P, Hrivniak L. Inverse Kinematics Data Adaptation to Non-Standard Modular Robotic Arm Consisting of Unique Rotational Modules. Applied Sciences. 2021; 11(3):1203. https://doi.org/10.3390/app11031203
Chicago/Turabian StyleOndočko, Štefan, Jozef Svetlík, Michal Šašala, Zdenko Bobovský, Tomáš Stejskal, Jozef Dobránsky, Peter Demeč, and Lukáš Hrivniak. 2021. "Inverse Kinematics Data Adaptation to Non-Standard Modular Robotic Arm Consisting of Unique Rotational Modules" Applied Sciences 11, no. 3: 1203. https://doi.org/10.3390/app11031203
APA StyleOndočko, Š., Svetlík, J., Šašala, M., Bobovský, Z., Stejskal, T., Dobránsky, J., Demeč, P., & Hrivniak, L. (2021). Inverse Kinematics Data Adaptation to Non-Standard Modular Robotic Arm Consisting of Unique Rotational Modules. Applied Sciences, 11(3), 1203. https://doi.org/10.3390/app11031203