
Lagrangian Data Assimilation for Improving Model Estimates of Velocity Fields and Residual Currents in a Tidal Estuary

 , and
, and 
Abstract
1. Introduction
2. Materials and Methods
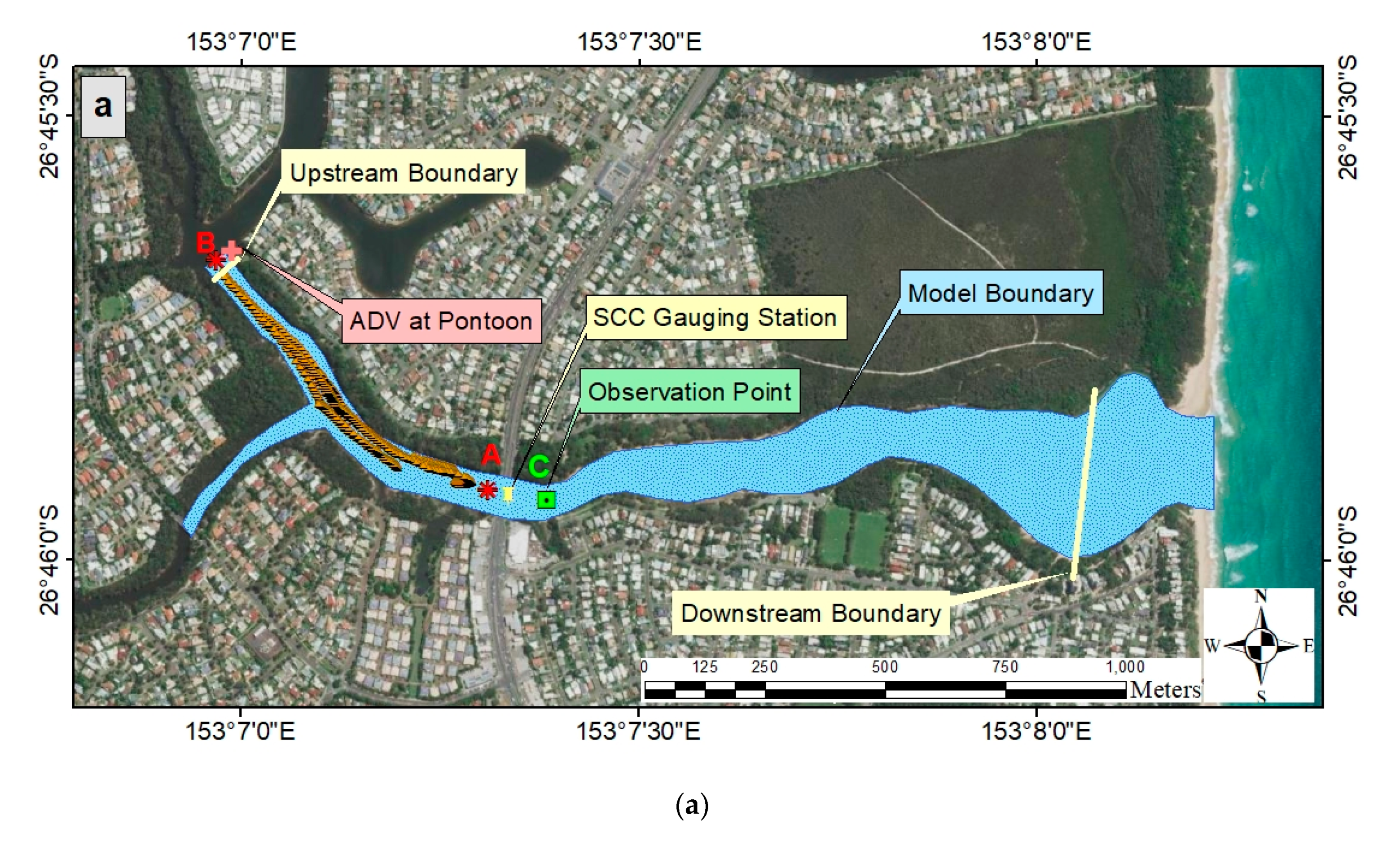
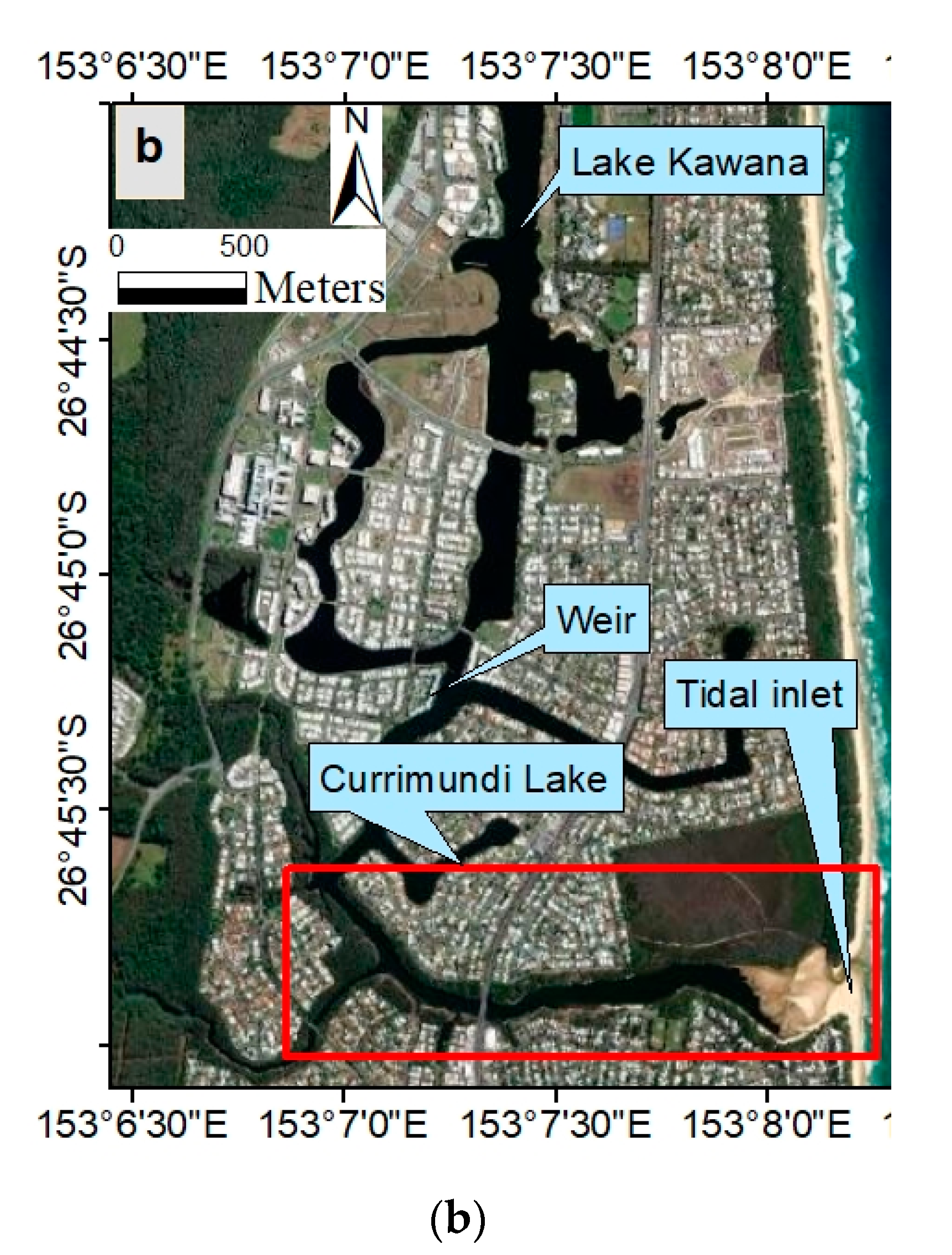
2.1. Study Area
2.2. Field Experiment Descriptions and Instrumentation
2.3. Hydrodynamic Model
3. Data Assimilation
3.1. Data Assimilation Platform
3.2. Data Assimilation Algorithm
3.3. Data Assimilation Setup
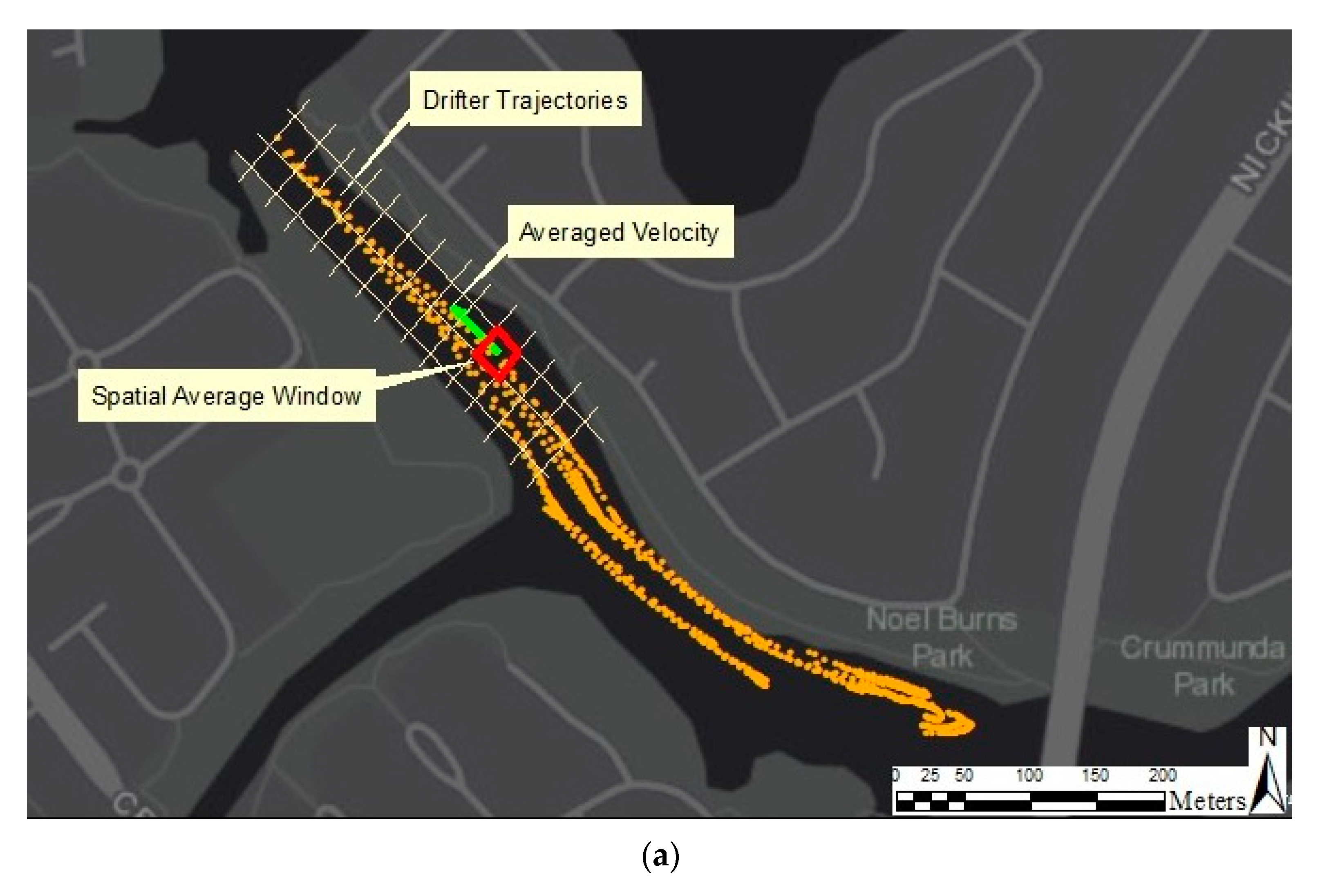
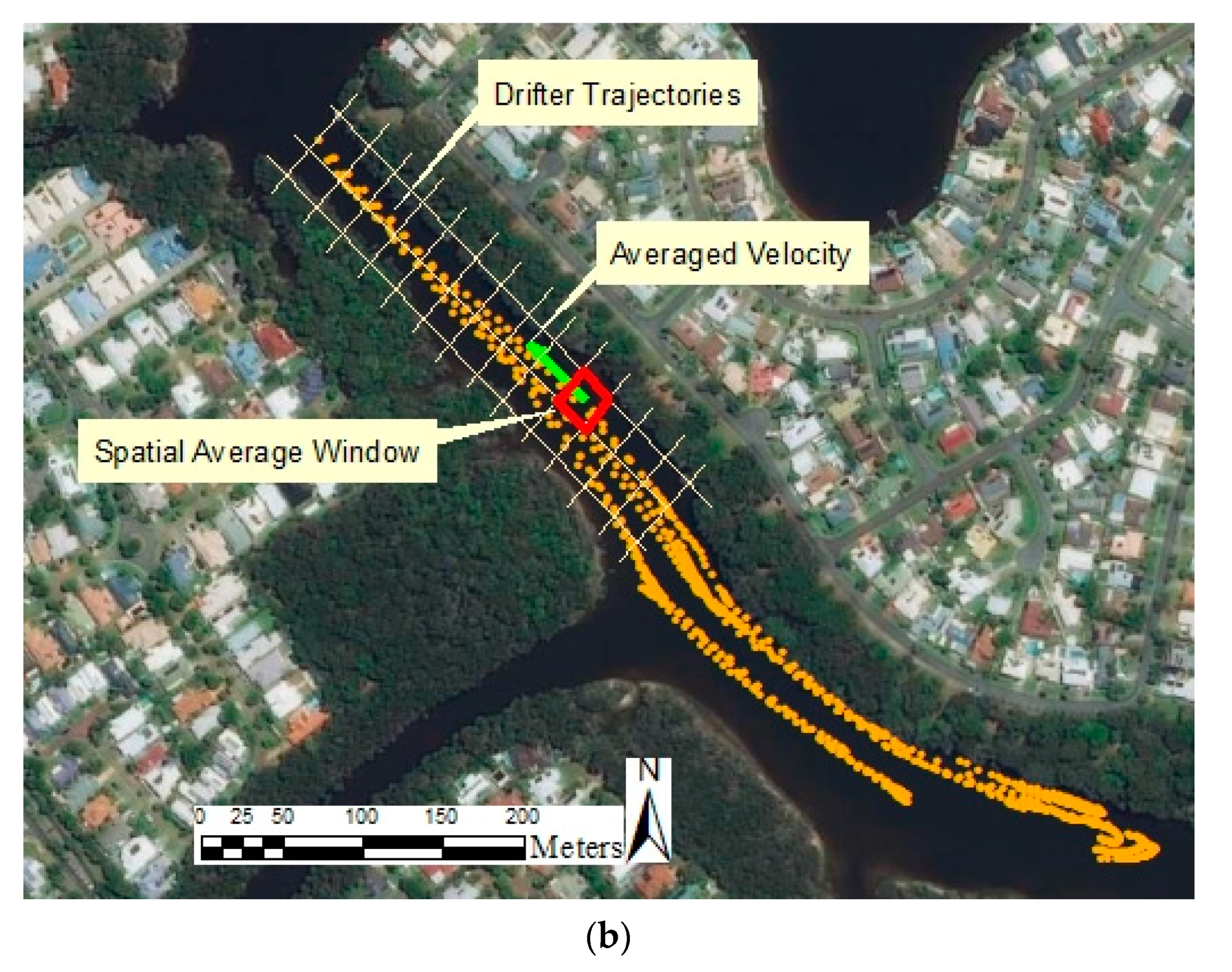
3.4. Pseudo- Lagrangian Assimilation
3.5. Trajectory Filtering
4. DA Experiments
4.1. Experiment Characteristics
- Free-Run: Model simulation without assimilation;
- Base-Test: The assimilation of the Eulerian velocities obtained from eight Lagrangian drifter data released within the straight section of the channel between points A and B (Figure 1). The assimilation process initiates with a sampling period Δt = 1 min, which corresponds to the time step of the model, so the assimilation is undertaken at each model time step. This experiment is designed to study the DA performance on the velocity estimates subject to the availability of velocity information during the drifter travel time;
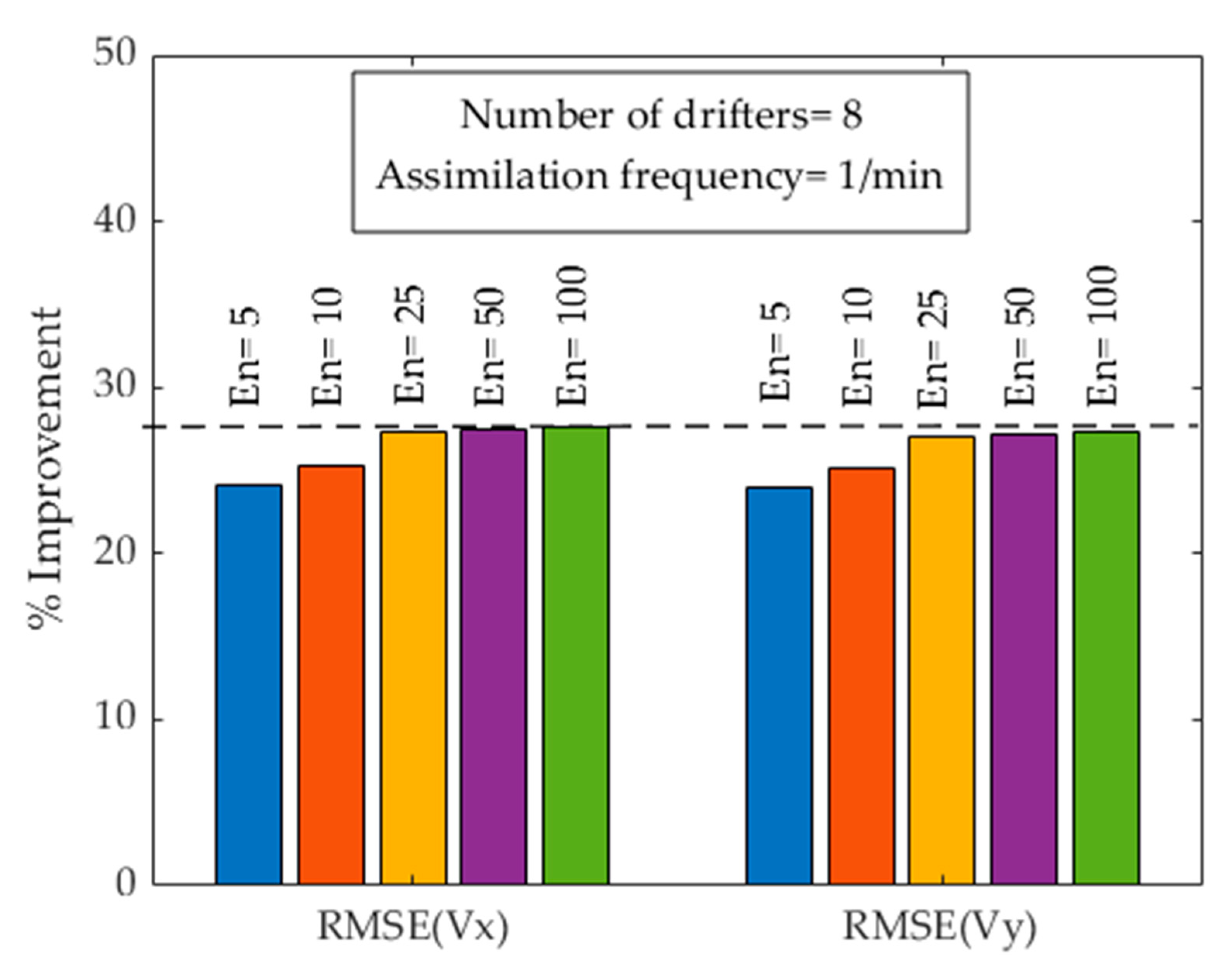
- Ensemble-Test: To assess the impact of the number of ensemble members, five values for ensemble size were analysed: 5, 10, 25, 50 and 100. Various ensemble sizes were selected to gain the optimum size considering a trade-off between computational cost and accuracy;
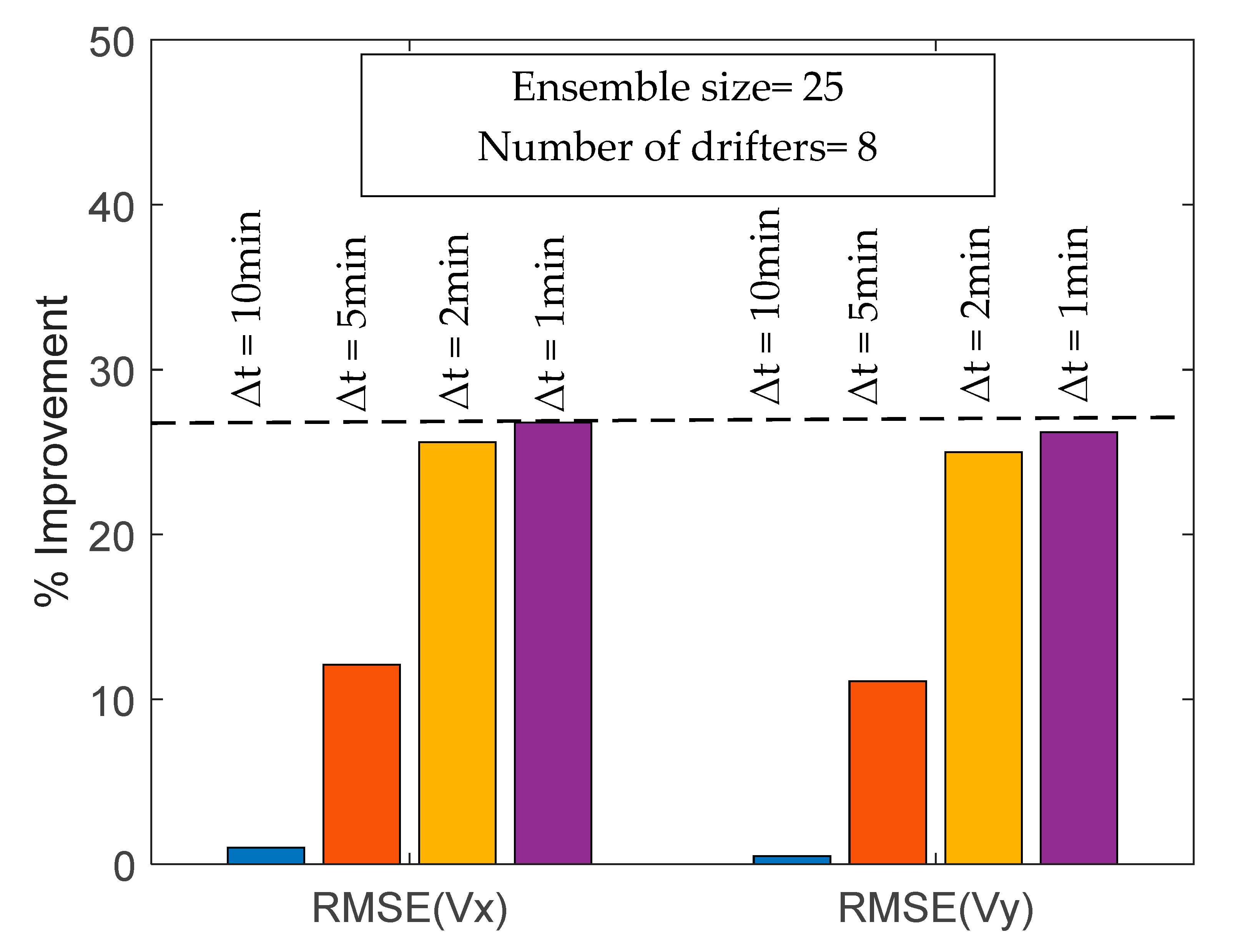
- Frequency-Test: A series of experiments was performed maintaining the same configuration as in Base-Test, using sampling period Δt varied as 1, 2, 5 and 10 min.
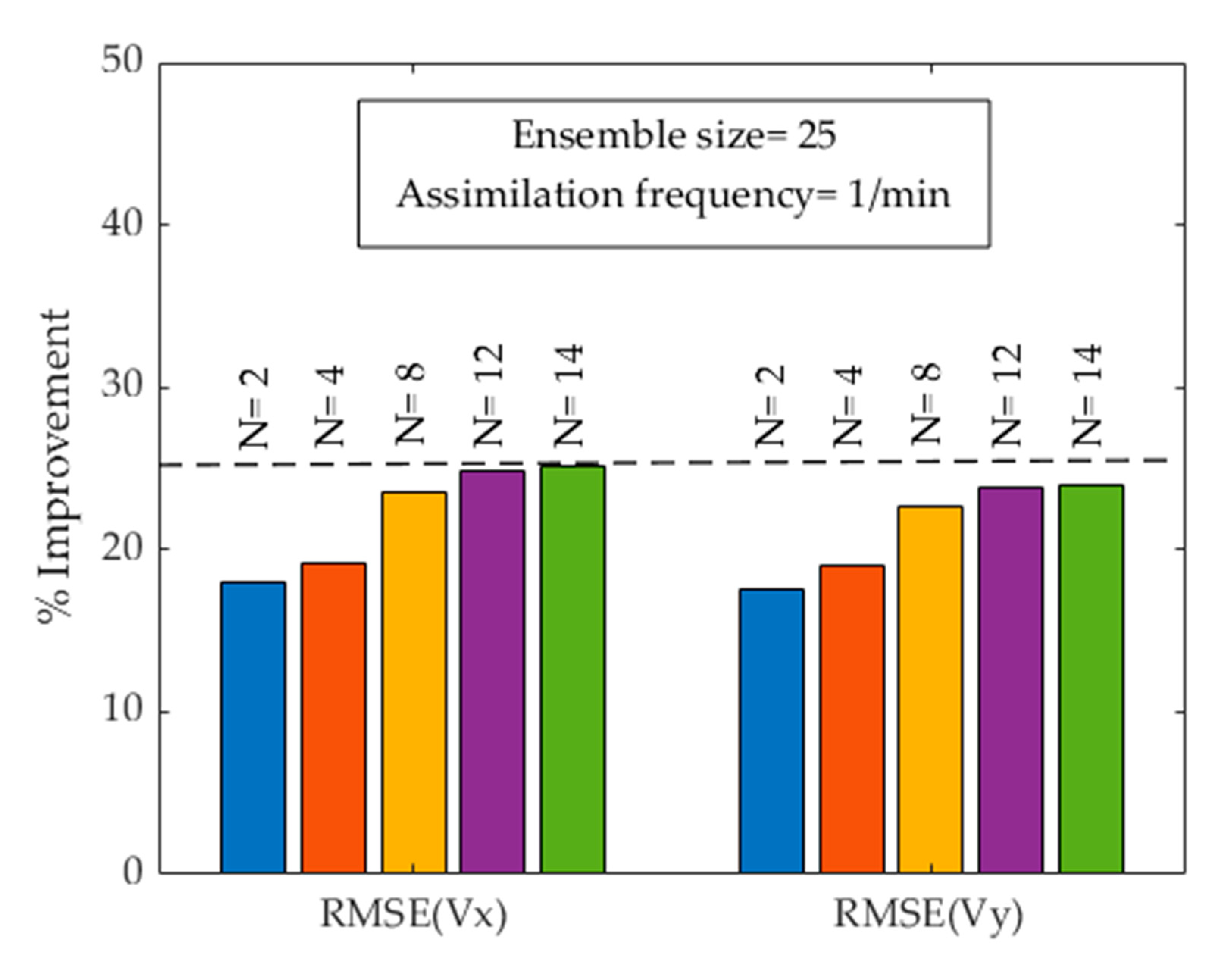
- Density-Test: To examine the effect of the number of drifters deployed, two experiments, in addition to Base-Test, were performed with four and two drifters released in the straight section of the lake;
- Validation-Test: To validate the DA performance with a different set of data (i.e., six non-assimilated drifters).
4.1.1. Monitoring Configurations
- Set-Up I: Using one fixed ADV deployed 0.5 m below the surface at the pontoon (Figure 1). This set-up investigated the impact of DA on velocity estimates, assimilating 21 h of velocity data at ten-second intervals.
- Set-Up II: A combination of Base-Test and Set-Up I, using both drifters and ADV velocity data simultaneously. Table 3 summarises the characteristics of the DA experiments and monitoring network used for evaluating the DA performance.
4.1.2. DA Performance Evaluation
5. Results and Discussion
5.1. Ensemble Size
5.2. Assimilation Frequency
5.3. Number of Drifters
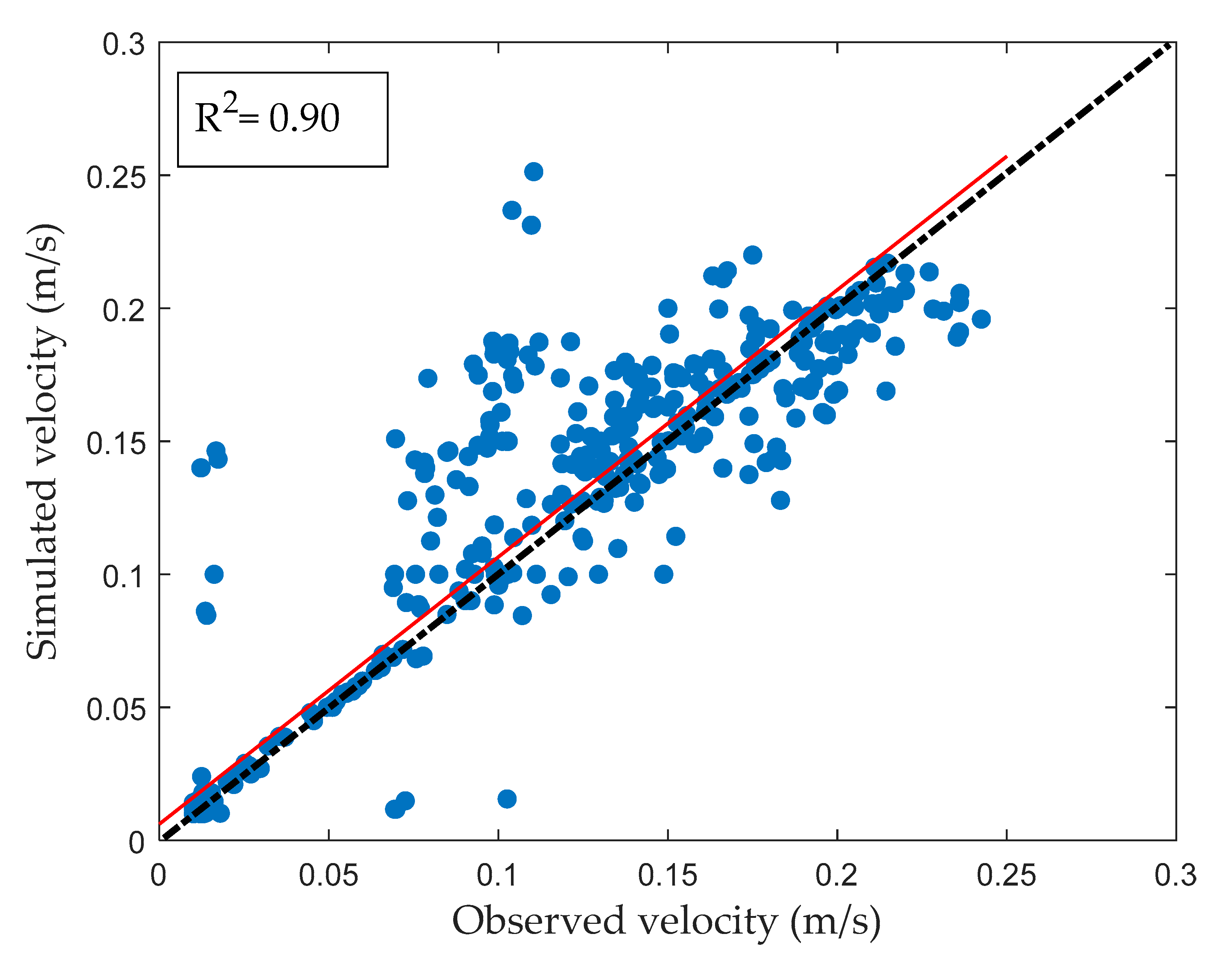
5.4. Model Validation
5.5. Improvement of Velocity Estimates at Observed Locations
5.6. Impact of DA Observation Types on the Model Performance
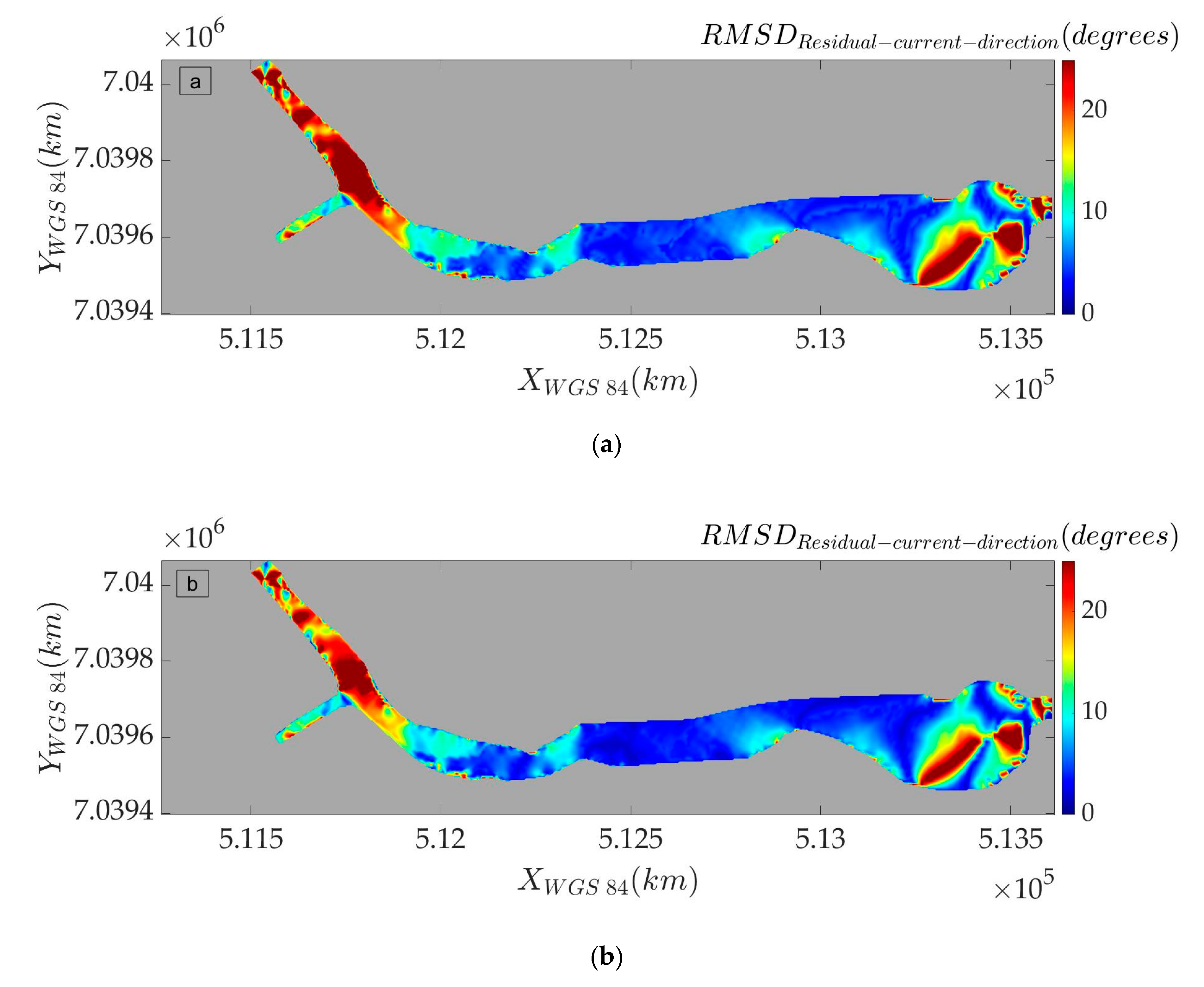
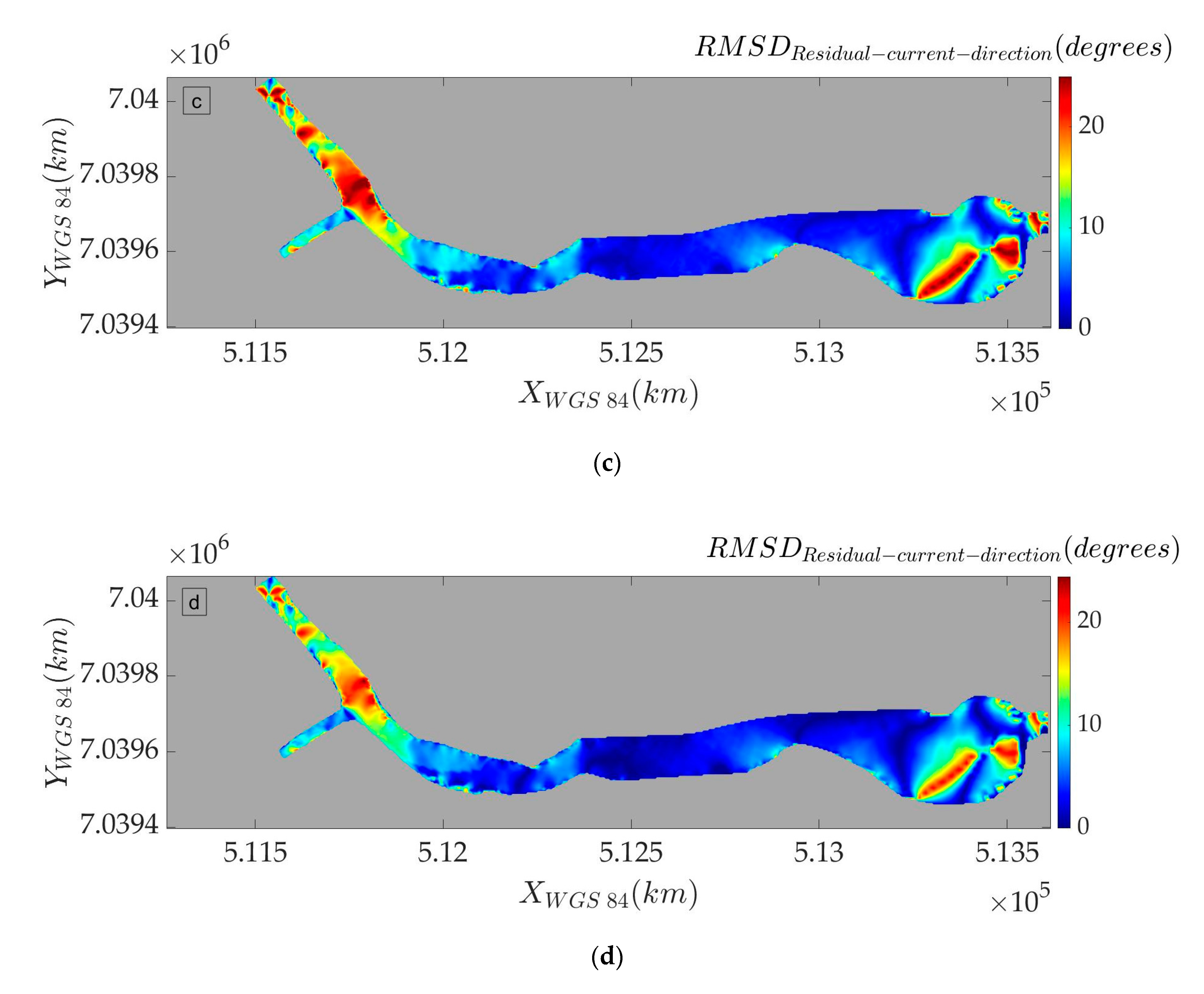
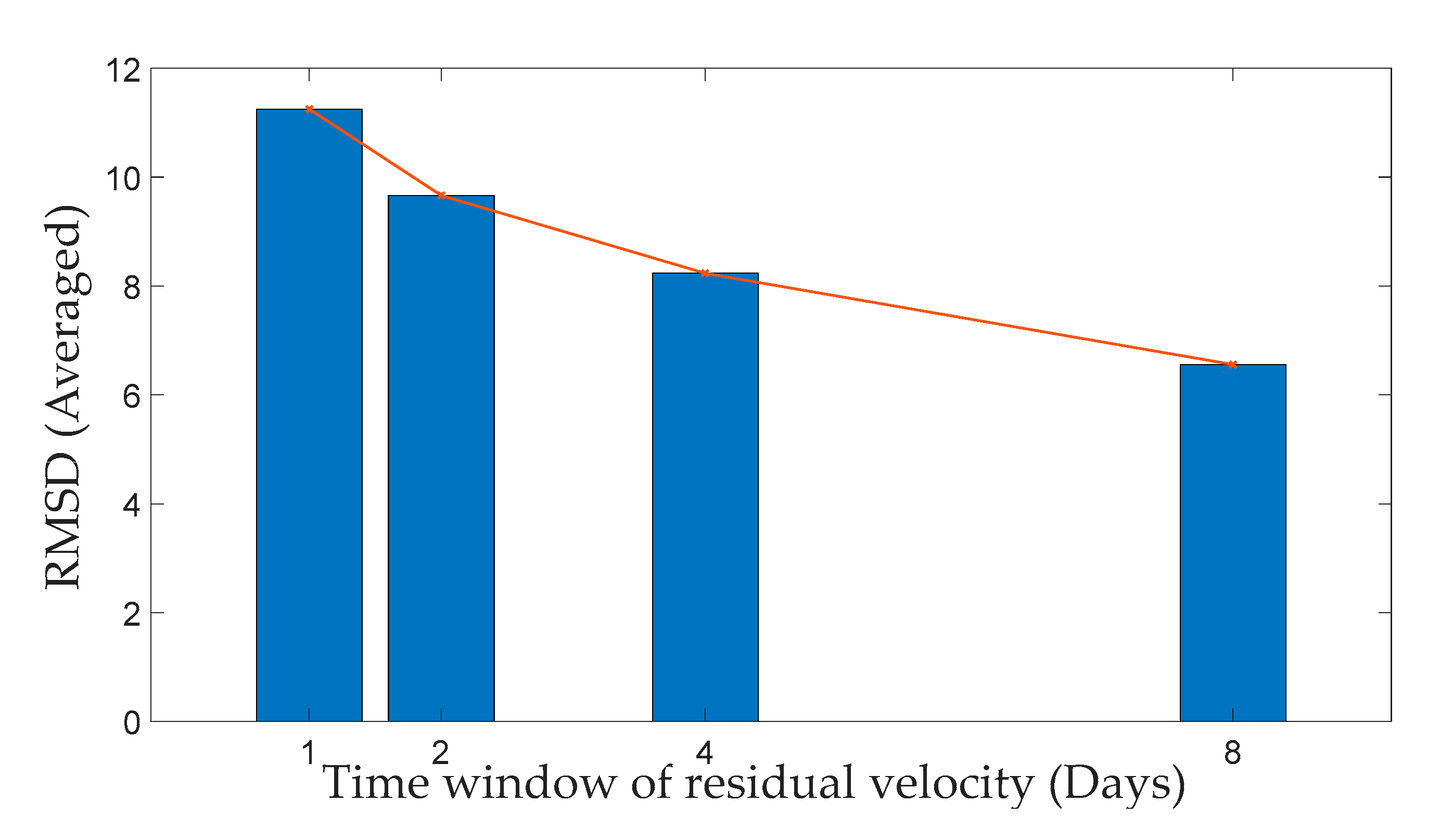
5.7. Spatial Variation of Residuals Currents (Direction of Residual Currents)
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Babovic, V.; Karri, R.; Wang, X.; Ooi, S.K.; Badwe, A. Efficient data assimilation for accurate forecasting of sea-level anomalies and residual currents using the Singapore regional model. Paper presented at the Geophys. Res. Abstr. 2011, 13. [Google Scholar]
- Baracchini, T. From Observations to 3D Forecasts: Data Assimilation for High Resolution Lakes Monitoring; EPFL: Lausanne, Switzerland, 2019. [Google Scholar]
- Baracchini, T.; Chu, P.Y.; Šukys, J.; Lieberherr, G.; Wunderle, S.; Wüest, A.; Bouffard, D. Data assimilation of in situ and satellite remote sensing data to 3D hydrodynamic lake models: A case study using Delft3D-FLOW v4.03 and OpenDA v2.4. Geosci. Model Dev. 2020, 13, 1267–1284. [Google Scholar] [CrossRef]
- Barnard, P.L.; Erikson, L.H.; Elias, E.P.; Dartnell, P. Sediment transport patterns in the San Francisco Bay Coastal System from cross-validation of bedform asymmetry and modeled residual flux. Mar. Geol. 2013, 345, 72–95. [Google Scholar] [CrossRef]
- Bellsky, T.; Kostelich, E.J.; Mahalov, A. Kalman filter data assimilation: Targeting observations and parameter estimation. Chaos Interdiscip. J. Nonlinear Sci. 2014, 24, 024406. [Google Scholar] [CrossRef] [PubMed]
- Chanson, H.; Brown, R.J.; Trevethan, M. Turbulence measurements in a small subtropical estuary under king tide conditions. Environ. Fluid Mech. 2012, 12, 265–289. [Google Scholar] [CrossRef]
- Cormier, R.; Kannen, A.; Elliott, M.; Hall, P.; Davies, I.M. Marine and Coastal Ecosystem-Based Risk Management Handbook; International Council for the Exploration of the Sea (ICES): Copenhagen, Denmark, 2013. [Google Scholar]
- D-Flow Flexible Mesh User Manual. Manuals Delft3D FM Suite 2019.01. Available online: https://www.deltares.nl/en/software/delft3d-flexible-mesh-suite/ (accessed on 1 December 2020).
- Dee, D.P. Bias and data assimilation. Q. J. R. Meteorol. Soc. 2005, 131, 3323–3343. [Google Scholar] [CrossRef]
- El Serafy, G.Y.; Gerritsen, H.; Hummel, S.; Weerts, A.H.; Mynett, A.E.; Tanaka, M. Application of data assimilation in portable operational forecasting systems—the DATools assimilation environment. Ocean Dyn. 2007, 57, 485–499. [Google Scholar] [CrossRef][Green Version]
- Elliott, M.; Borja, A.; McQuatters-Gollop, A.; Mazik, K.; Birchenough, S.; Andersen, J.H.; Painting, S.; Peck, M. Force majeure: Will climate change affect our ability to attain Good Environmental Status for marine biodiversity? Mar. Pollut. 2015, 95, 7–27. [Google Scholar] [CrossRef]
- Evensen, G. Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics. J. Geophys. Res. Space Phys. 1994, 99, 10143–10162. [Google Scholar] [CrossRef]
- Evensen, G. The Ensemble Kalman Filter: Theoretical formulation and practical implementation. Ocean Dyn. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Fraccascia, S.; Winter, C.; Ernstsen, V.B.; Hebbeln, D. Residual currents and bedform migration in a natural tidal inlet (Knudedyb, Danish Wadden Sea). Geomorphology 2016, 271, 74–83. [Google Scholar] [CrossRef]
- Garcia, M.; Ramirez, I.; Verlaan, M.; Castillo, J. Application of a three-dimensional hydrodynamic model for San Quintin Bay, B.C., Mexico. Validation and calibration using OpenDA. J. Comput. Appl. Math. 2015, 273, 428–437. [Google Scholar] [CrossRef]
- Garel, E.; Ferreira, O. Fortnightly Changes in Water Transport Direction Across the Mouth of a Narrow Estuary. Chesap. Sci. 2012, 36, 286–299. [Google Scholar] [CrossRef]
- Gauss, F. Theory of the Motion of Heavenly Bodies Moving about the Sun in Conic Sections; (English transl. by CH Davis), reprinted 1963; Dover: New York, NY, USA, 1809. [Google Scholar]
- Honnorat, M.; Monnier, J.; Le Dimet, F.-X. Lagrangian data assimilation for river hydraulics simulations. Comput. Vis. Sci. 2008, 12, 235–246. [Google Scholar] [CrossRef]
- Koch, M.; Sun, H. Tidal and non-tidal characteristics of water levels and flow in the Apalachicola Bay, Florida. WIT Trans. Built Environ. 1970, 43, 10. [Google Scholar]
- Le Coz, J.; Hauet, A.; Pierrefeu, G.; Dramais, G.; Camenen, B. Performance of image-based velocimetry (LSPIV) applied to flash-flood discharge measurements in Mediterranean rivers. J. Hydrol. 2010, 394, 42–52. [Google Scholar] [CrossRef]
- Loos, S.; Shin, C.M.; Sumihar, J.; Kim, K.; Cho, J.; Weerts, A.H. Ensemble data assimilation methods for improving river water quality forecasting accuracy. Water Res. 2019, 171, 115343. [Google Scholar] [CrossRef]
- MacMahan, J.; Brown, J.; Thornton, E. Low-Cost Handheld Global Positioning System for Measuring Surf-Zone Currents. J. Coast. Res. 2009, 253, 744–754. [Google Scholar] [CrossRef]
- Mardani, N.; Suara, K.; Fairweather, H.; Brown, R.; McCallum, A.; Sidle, R.C. Improving the Accuracy of Hydrodynamic Model Predictions Using Lagrangian Calibration. Water 2020, 12, 575. [Google Scholar] [CrossRef]
- Mardani, N.; Suara, K.; Khanarmuei, M.; Brown, R.; McCallum, A.; Sidle, R. A Numerical Investigation of Dynamics of A Shallow Intermittently Closed and Open Lake and Lagoon (ICOLL). In Proceedings of the 22nd Australasian Fluid Mechanics Conference AFMC2020, Brisbane, Australia, 7–10 December 2020. [Google Scholar]
- Mcsweeney, S.; Kennedy, D.M.; Rutherfurd, I.D. Classification of Intermittently Closed and Open Coastal Lakes and Lagoons in Victoria, Australia. In Proceedings of the 7th Australian Stream Management Conference, Townsville, Australia, 27–30 July 2014. [Google Scholar]
- Molcard, A.; Piterbarg, L.I.; Griffa, A.; Özgökmen, T.M.; Mariano, A.J. Assimilation of drifter observations for the reconstruction of the Eulerian circulation field. J. Geophys. Res. Space Phys. 2003, 108, 3058. [Google Scholar] [CrossRef]
- Molcard, A.; Poje, A.C.; Özgökmen, T.M. Directed drifter launch strategies for Lagrangian data assimilation using hyperbolic trajectories. Ocean Model. 2006, 12, 268–289. [Google Scholar] [CrossRef]
- Németh, A.A.; Hulscher, S.J.; de Vriend, H.J. Modelling sand wave migration in shallow shelf seas. Cont. Shelf Res. 2002, 22, 2795–2806. [Google Scholar] [CrossRef]
- Oubanas, H.; Gejadze, I.; Malaterre, P.-O.; Mercier, F. River discharge estimation from synthetic SWOT-type observations using variational data assimilation and the full Saint-Venant hydraulic model. J. Hydrol. 2018, 559, 638–647. [Google Scholar] [CrossRef]
- Pawlowicz, R.; Hannah, C.; Rosenberger, A. Lagrangian observations of estuarine residence times, dispersion, and trapping in the Salish Sea. Estuarine Coast. Shelf Sci. 2019, 225, 106246. [Google Scholar] [CrossRef]
- Sakov, P.; Sandery, P.A. Comparison of EnOI and EnKF regional ocean reanalysis systems. Ocean Model. 2015, 89, 45–60. [Google Scholar] [CrossRef]
- Salman, H.; Kuznetsov, L.; Jones, C.K.R.T.; Ide, K. A Method for Assimilating Lagrangian Data into a Shallow-Water-Equation Ocean Model. Mon. Weather. Rev. 2006, 134, 1081–1101. [Google Scholar] [CrossRef]
- Shaha, D.C.; Cho, Y.-K.; Kwak, M.-T.; Kundu, S.R.; Jung, K.T. Spatial variation of the longitudinal dispersion coefficient in an estuary. Hydrol. Earth Syst. Sci. 2011, 15, 3679–3688. [Google Scholar] [CrossRef]
- Song, Z.; Shi, W.; Zhang, J.; Hu, H.; Zhang, F.; Xu, X. Transport Mechanism of Suspended Sediments and Migration Trends of Sediments in the Central Hangzhou Bay. Water 2020, 12, 2189. [Google Scholar] [CrossRef]
- Suara Wang, C.; Feng, Y.; Brown, R.J.; Chanson, H.; Borgas, M. High-resolution GNSS-tracked drifter for studying surface dispersion in shallow water. J. Atmos. Ocean. Technol. 2015, 32, 579–590. [Google Scholar] [CrossRef]
- Suara Wang, H.; Chanson, H.; Gibbes, B.; Brown, R.J. Response of GPS-tracked drifters to wind and water currents in a tidal estuary. IEEE J. Ocean. Eng. 2018, 44, 1077–1089. [Google Scholar] [CrossRef]
- Suara, K.; Mardani, N.; Fairweather, H.; McCallum, A.; Allan, C.; Sidle, R.; Brown, R. Observation of the Dynamics and Horizontal Dispersion in a Shallow Intermittently Closed and Open Lake and Lagoon (ICOLL). Water 2018, 10, 776. [Google Scholar] [CrossRef]
- Tamura, H.; Bacopoulos, P.; Wang, D.; Hagen, S.C.; Kubatko, E.J. State estimation of tidal hydrodynamics using ensemble Kalman filter. Adv. Water Resour. 2014, 63, 45–56. [Google Scholar] [CrossRef]
- Tinka, A.; Strub, I.; Wu, Q.; Bayen, A.M. Quadratic programming based data assimilation with passive drifting sensors for shallow water flows. Int. J. Control. 2010, 83, 1686–1700. [Google Scholar] [CrossRef]
- Tossavainen, O.-P.; Percelay, J.; Tinka, A.; Wu, Q.; Bayen, A.M. Ensemble Kalman Filter based state estimation in 2D shallow water equations using Lagrangian sensing and state augmentation. In Proceedings of the 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 1783–1790. [Google Scholar] [CrossRef]
- Van Velzen, N.; Verlaan, M. COSTA a problem solving environment for data assimilation applied for hydrodynamical modelling. Meteorol. Z. 2007, 16, 777–794. [Google Scholar] [CrossRef]
- Voulgaris, G.; Meyers, S.T. Temporal variability of hydrodynamics, sediment concentration and sediment settling velocity in a tidal creek. Cont. Shelf Res. 2004, 24, 1659–1683. [Google Scholar] [CrossRef]
- Wang, X.; Karri, R.; Ooi, S.; Babovic, V.; Gerritsen, H. Improving predictions of water levels and currents for Singapore regional waters through data assimilation using OpenDA. In Proceedings of the 34th World Congress of the International Association for Hydro-Environment Research and Engineering: 33rd Hydrology and Water Resources Symposium and 10th Conference on Hydraulics in Water Engineering, Brisbane, Australia, 26 June–1 July 2011. [Google Scholar]
- Weerts, A.H.; El Serafy, G.Y.; Hummel, S.; Dhondia, J.; Gerritsen, H. Application of generic data assimilation tools (DATools) for flood forecasting purposes. Comput. Geosci. 2010, 36, 453–463. [Google Scholar] [CrossRef]
- Wu, Q.; Tinka, A.; Weekly, K.; Beard, J.; Bayen, A.M. Variational Lagrangian data assimilation in open channel networks. Water Resour. Res. 2015, 51, 1916–1938. [Google Scholar] [CrossRef]
- Zhang, D.; Madsen, H.; Ridler, M.E.; Kidmose, J.; Jensen, K.H.; Refsgaard, J.C. Multivariate hydrological data assimilation of soil moisture and groundwater head. Hydrol. Earth Syst. Sci. 2016, 20, 4341–4357. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inlet Condition | Date | Tide | Tidal Range (m) | Water Elevation (m) | Discharge Range (m3/s) | Wind Speed Range (m/s) | Instrument Deployed | Sample Frequency (Hz) |
|---|---|---|---|---|---|---|---|---|
| Open | 27 April 2015 | Ebb | 0.4 | 0.2 | 0.6–17 | 0–4.0 | ADV- Sontek-2D side-looking (16 MHz) | 50 |
| Open | 28 April 2015 | Flood/Ebb | 0.6 | 0.7 | 0.15–30 | 0–4.0 | LR, low cost drifter | 1 |
| Parameter | Description | Value |
|---|---|---|
| (m) | Water level standard deviation | 0.05 |
| Discharge standard deviation | 1 | |
| (h) | Water level temporal correlation | 6 |
| (h) | Discharge temporal correlation | 6 |
| Experiment | Assimilation Type | Measurement Type and Number | Measurement Location | Assimilation Duration and Frequency |
|---|---|---|---|---|
| Free-Run | x | x | x | x |
| Base-Test | Pseudo Lagrangian | 8 drifters | From point A to B in Figure 1 | 3 h */1 min |
| Ensemble test | Pseudo Lagrangian | 8 drifters | From point A to B in Figure 1 | 3 h/1 min |
| Frequency test | Pseudo Lagrangian | 8 drifters | From point A to B in Figure 1 | 3 h/1 min |
| Density test | Pseudo Lagrangian | 8 drifters | From point A to B in Figure 1 | 3 h/1 min |
| Validation test | Pseudo Lagrangian | 6 drifters | From point A to B in Figure 1 | 3 h/1 min |
| Set-Up I | Eulerian | 1 ADV | Point C near bridge in Figure 1 | 18 h/1 min |
| Set-Up II | Eulerian + Pseudo Lagrangian | 8 drifters + 1 ADV | From point A to B and Point C in Figure 1 | 21 h/1 min |
| Free-Run No Assimilation | Base-Test DA with Lagrangian Data | Set-Up I DA with Eulerian Data | Set-Up II DA with Lagrangian & Eulerian Data | |
|---|---|---|---|---|
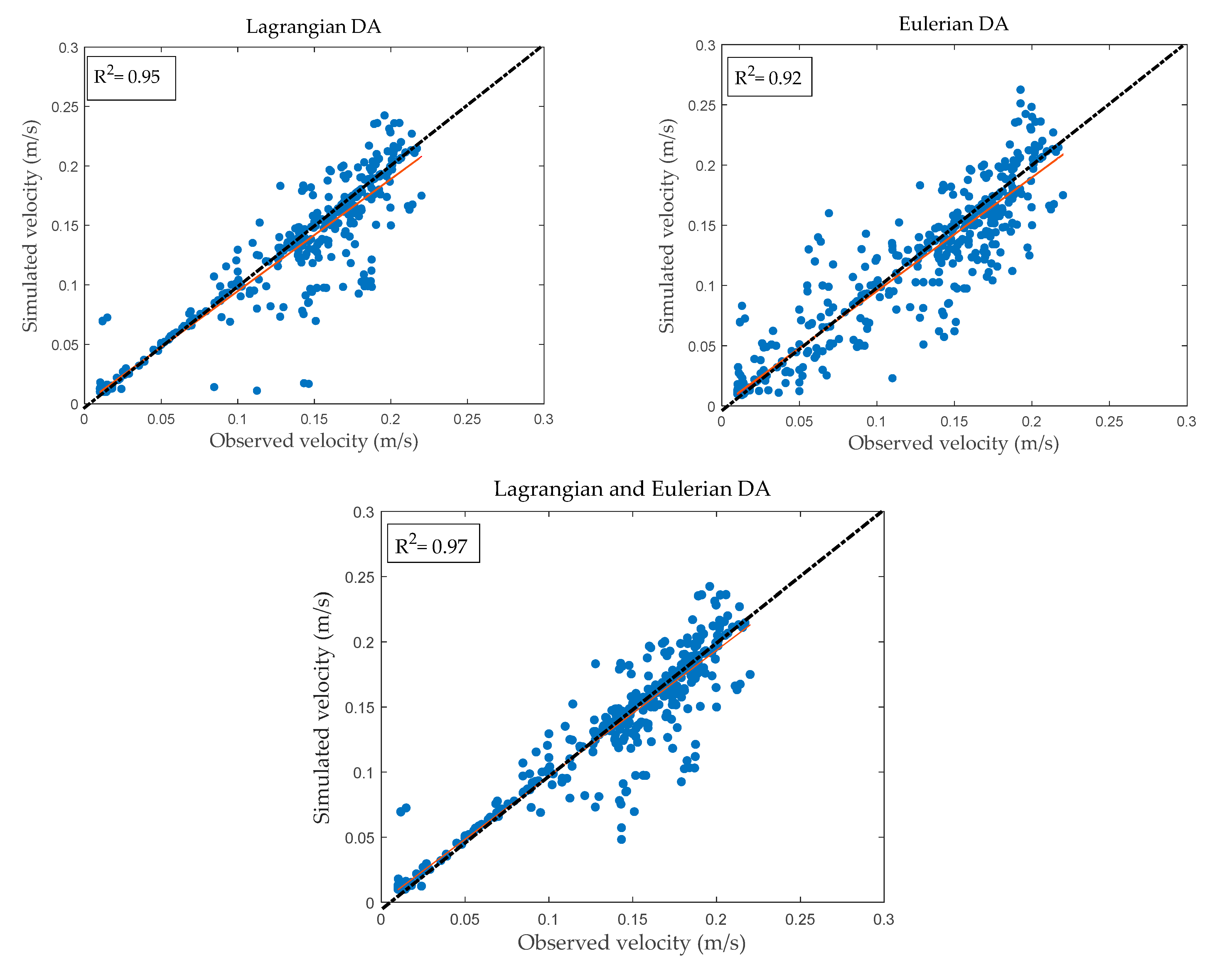
| RMSE (m/s) | 0.07 | 0.05 | 0.059 | 0.043 |
| R2 | 0.56 | 0.95 | 0.92 | 0.97 |
| Improvement (%) | 28 | 16 | 39 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mardani, N.; Khanarmuei, M.; Suara, K.; Brown, R.; McCallum, A.; Sidle, R.C. Lagrangian Data Assimilation for Improving Model Estimates of Velocity Fields and Residual Currents in a Tidal Estuary. Appl. Sci. 2021, 11, 11006. https://doi.org/10.3390/app112211006
Mardani N, Khanarmuei M, Suara K, Brown R, McCallum A, Sidle RC. Lagrangian Data Assimilation for Improving Model Estimates of Velocity Fields and Residual Currents in a Tidal Estuary. Applied Sciences. 2021; 11(22):11006. https://doi.org/10.3390/app112211006
Chicago/Turabian StyleMardani, Neda, Mohammadreza Khanarmuei, Kabir Suara, Richard Brown, Adrian McCallum, and Roy C. Sidle. 2021. "Lagrangian Data Assimilation for Improving Model Estimates of Velocity Fields and Residual Currents in a Tidal Estuary" Applied Sciences 11, no. 22: 11006. https://doi.org/10.3390/app112211006
APA StyleMardani, N., Khanarmuei, M., Suara, K., Brown, R., McCallum, A., & Sidle, R. C. (2021). Lagrangian Data Assimilation for Improving Model Estimates of Velocity Fields and Residual Currents in a Tidal Estuary. Applied Sciences, 11(22), 11006. https://doi.org/10.3390/app112211006