
Analysis of Equivalent Flexural Stiffness of Steel–Concrete Composite Beams in Frame Structures




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
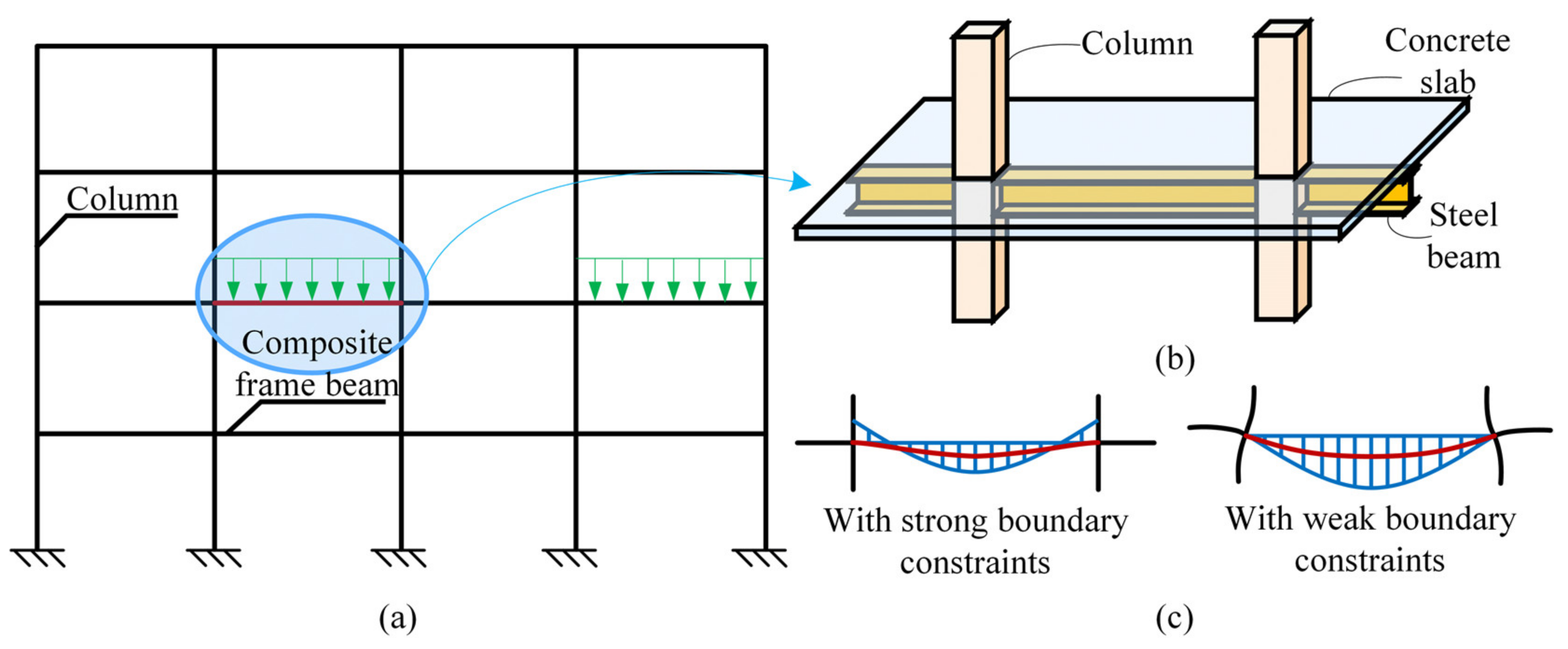
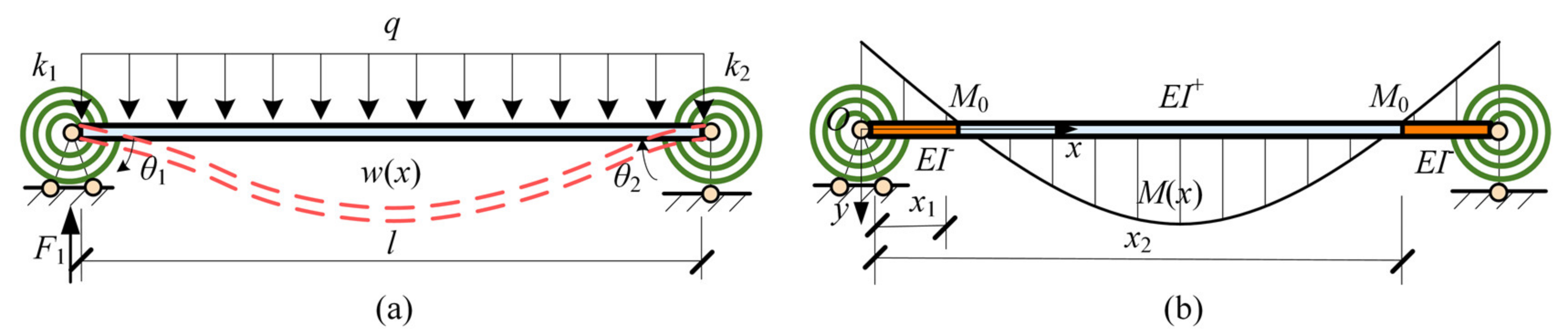
2. Theoretical Analysis
- x1 and x2 are substituted into Equation (7), and the rotation angles at the beam ends (θ1 and θ2) are solved;
- θ1 and θ2 are substituted into Equations (2) and (3) to solve the bending moment distribution function, M(x);
- M(x) is integrated using Equations (5) and (6), and the boundary condition functions (Equation (7)) are used to determine the integration constants (C1i and C2i, i = 1, 2, 3). Therefore, the vertical deflection distributions of each beam segment (wi(x)) and the entire composite beam (w(x)) can be obtained.
3. Parameter Analysis
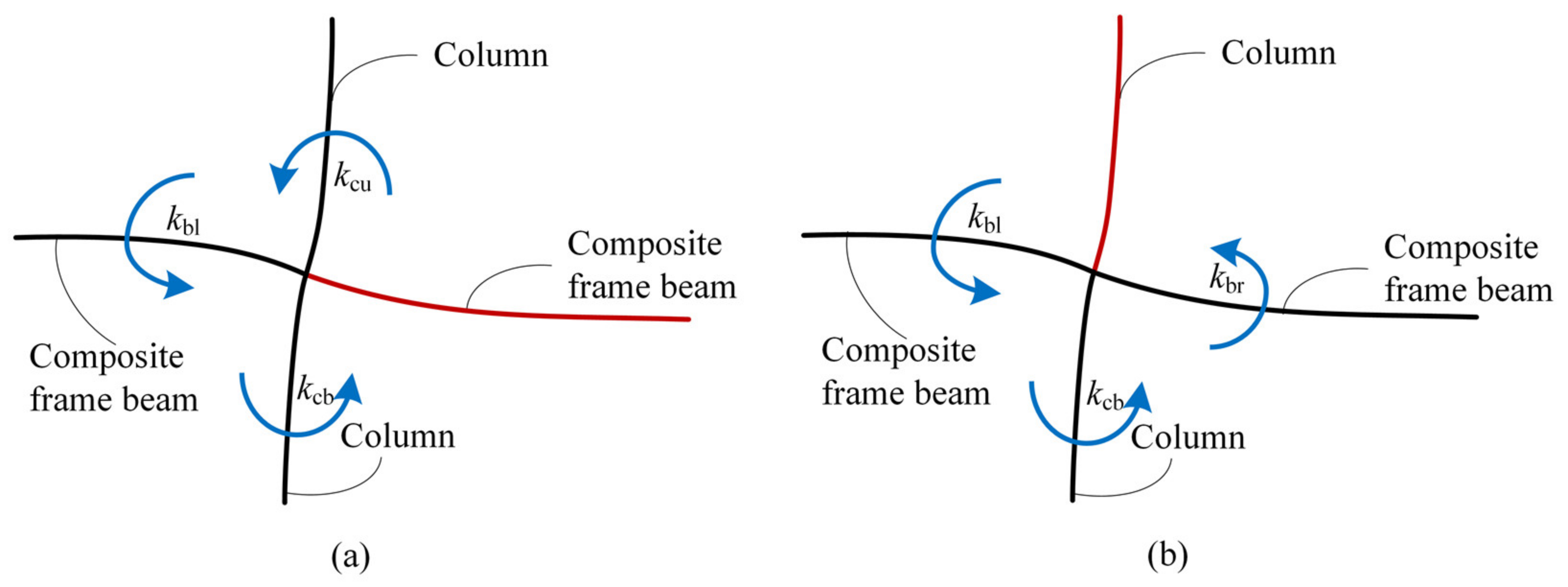
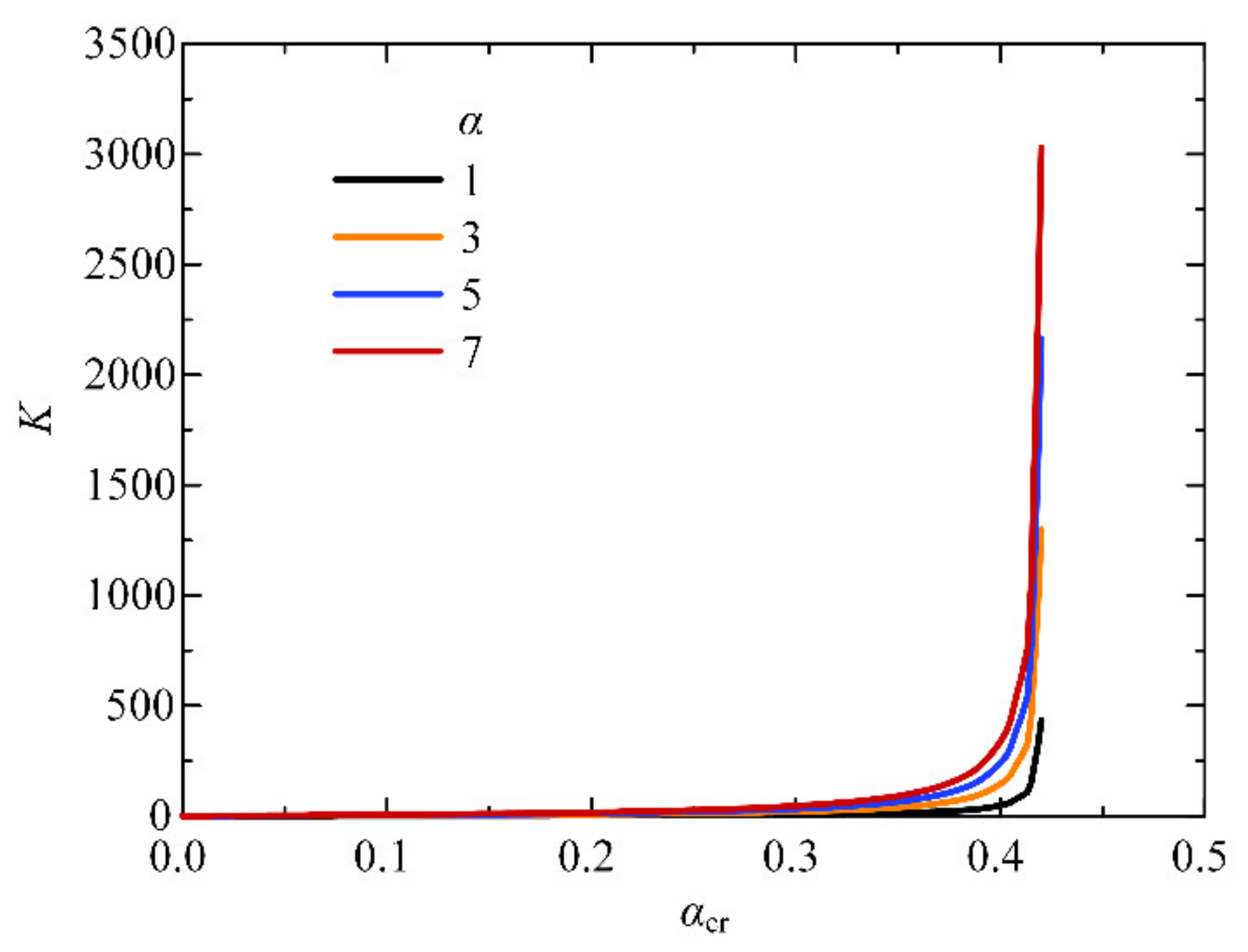
3.1. Rotation Constraints at Beam Ends
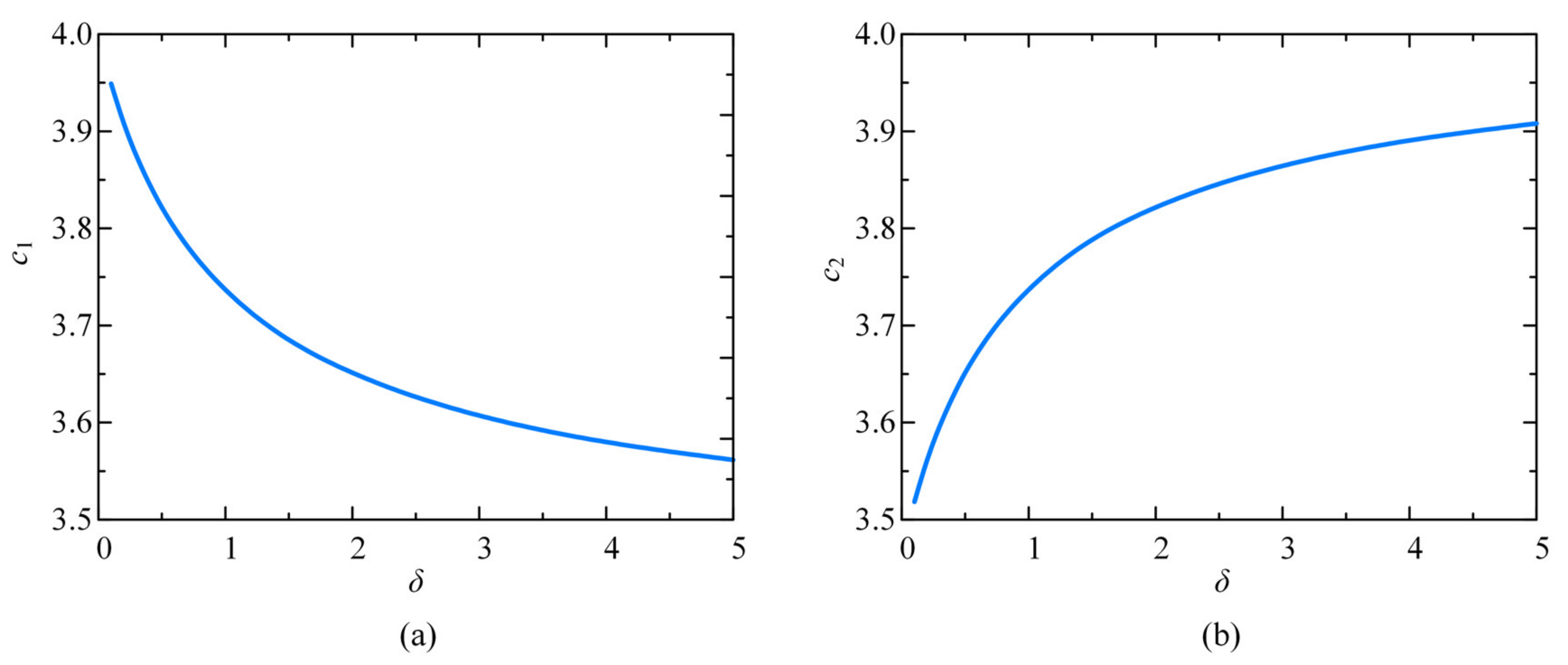
3.2. Identification of Critical Parameters
3.3. Consideration of Unequal Rotation Constraints at Beam Ends
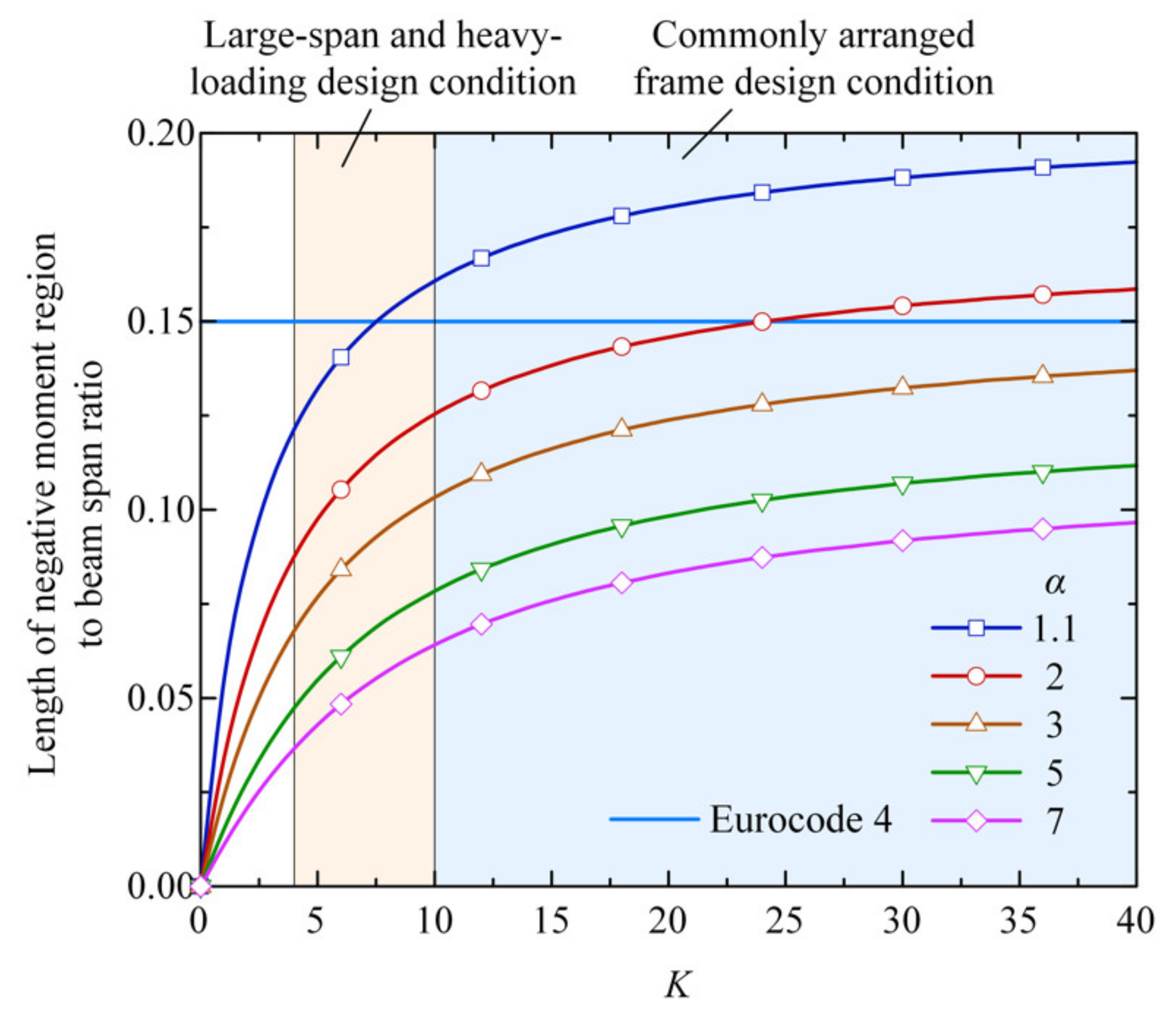
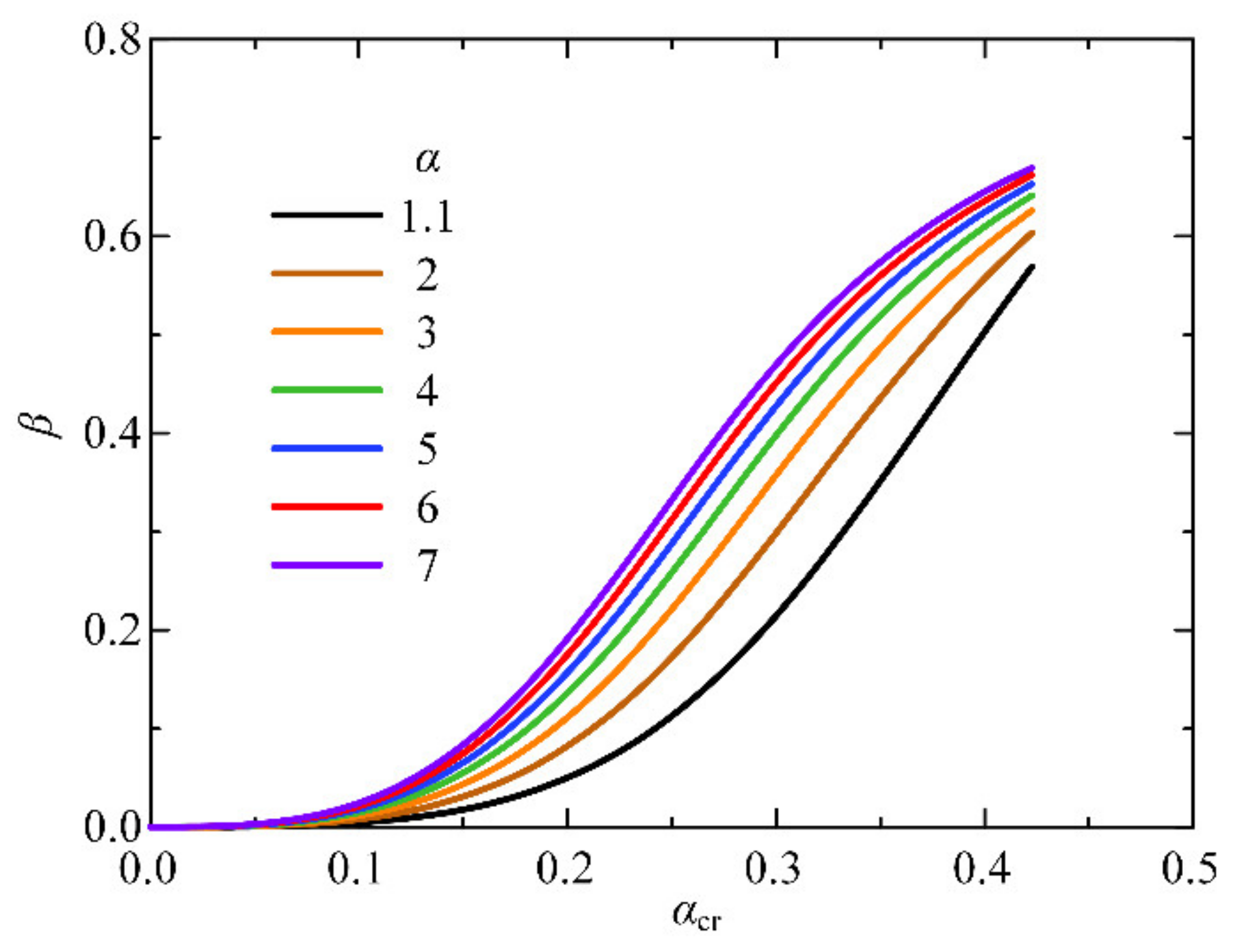
3.4. Length of the Negative Moment Region
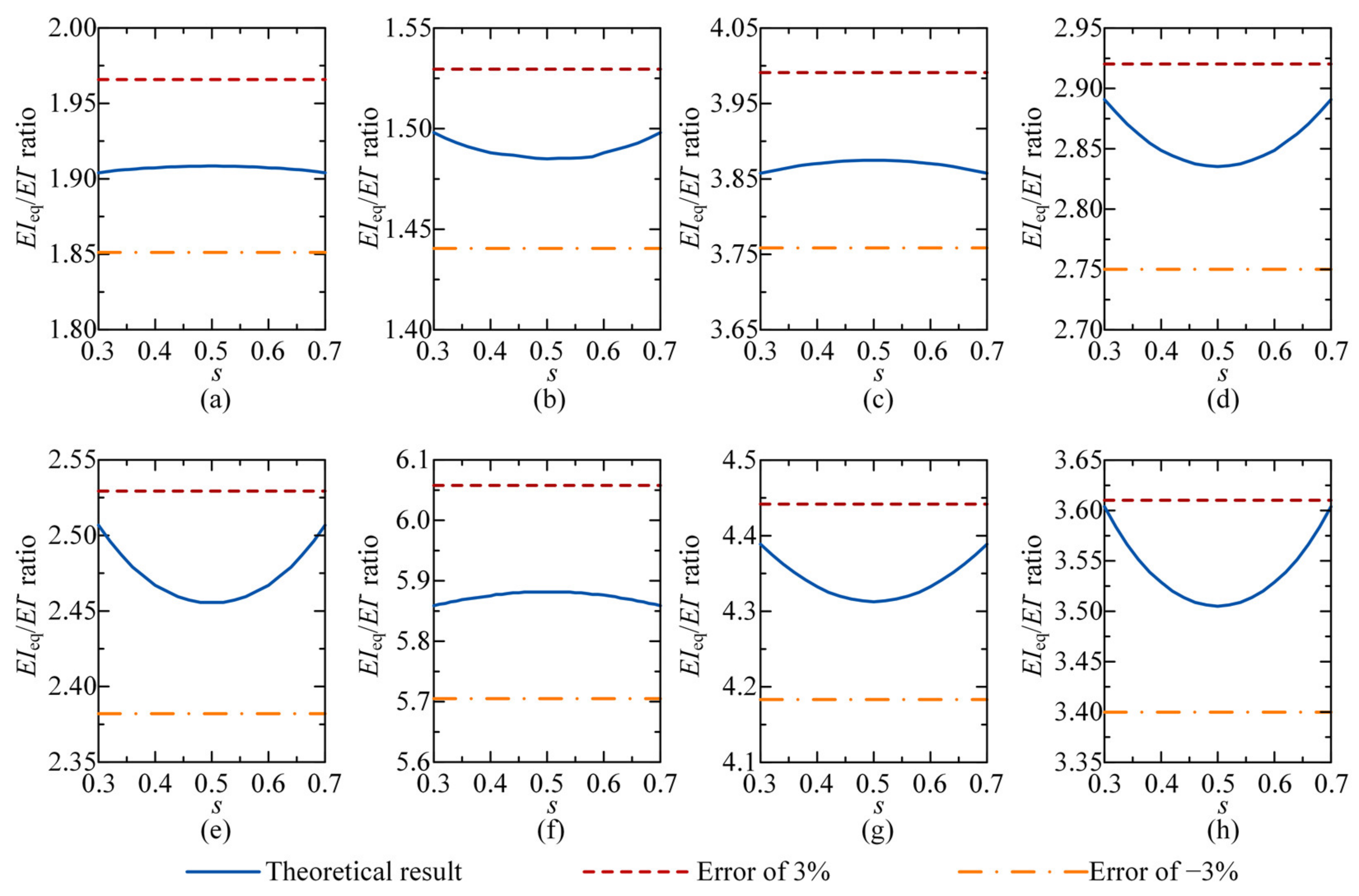
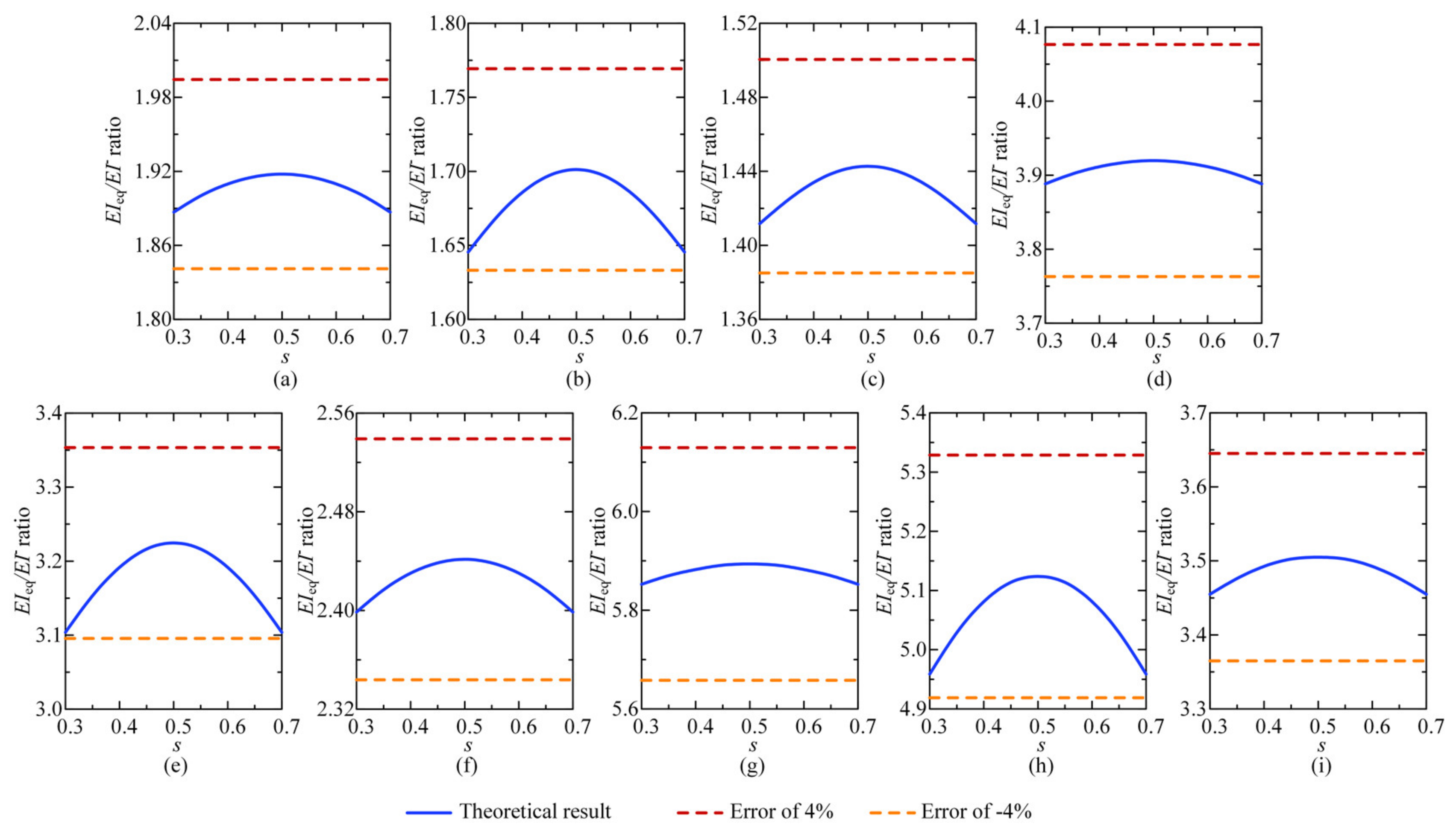
3.5. Equivalent Flexural Stiffness
4. Validation
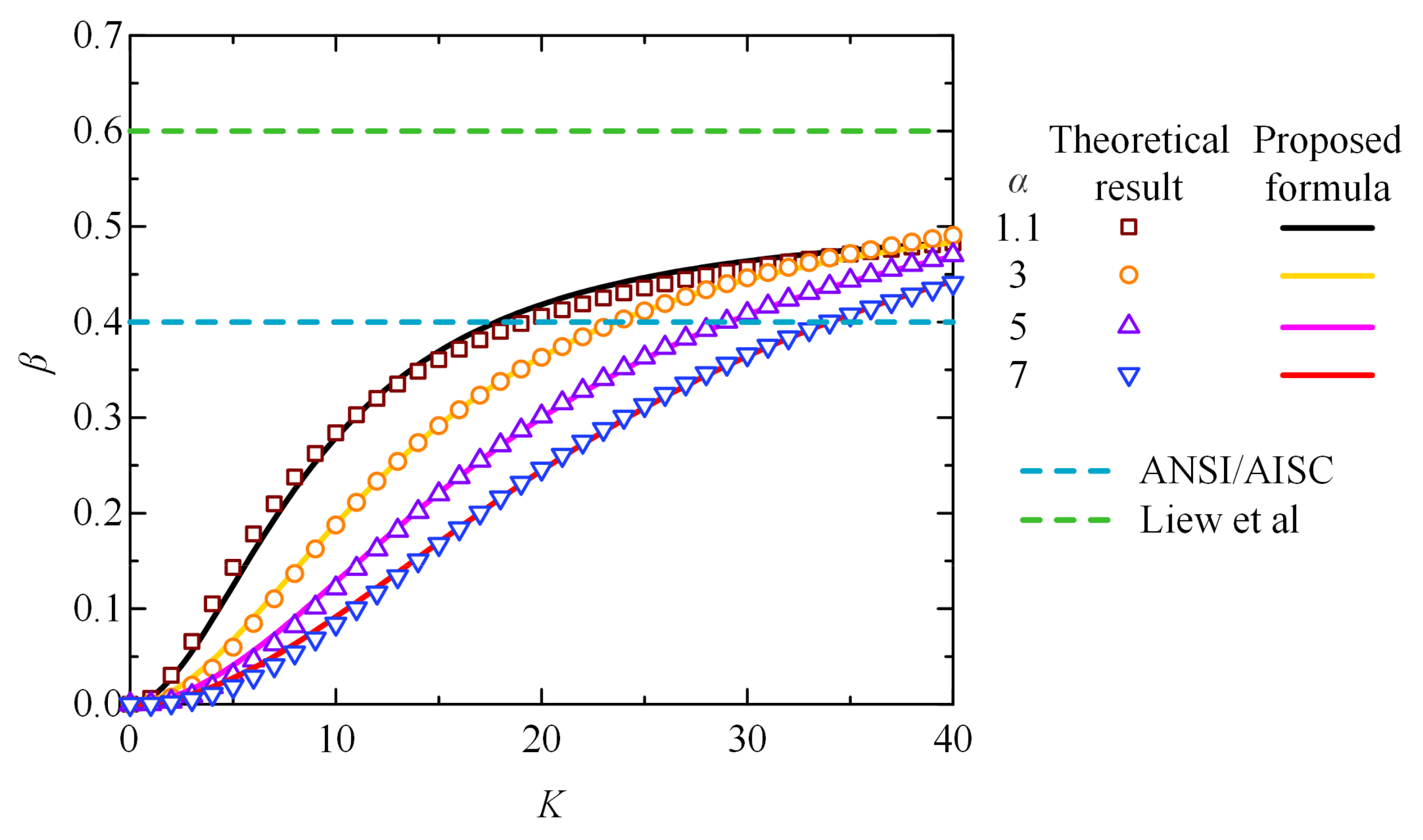
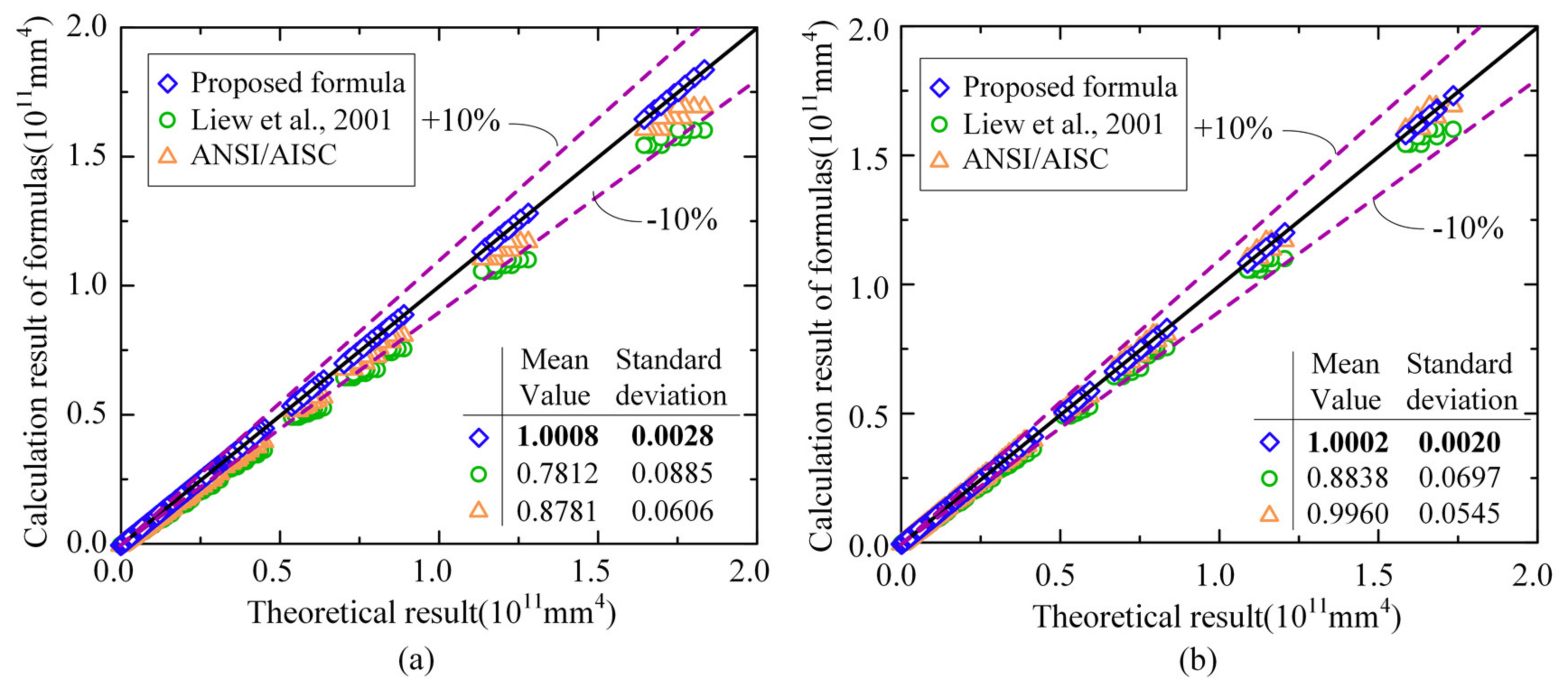
4.1. Comparison with Existing Design Formulas
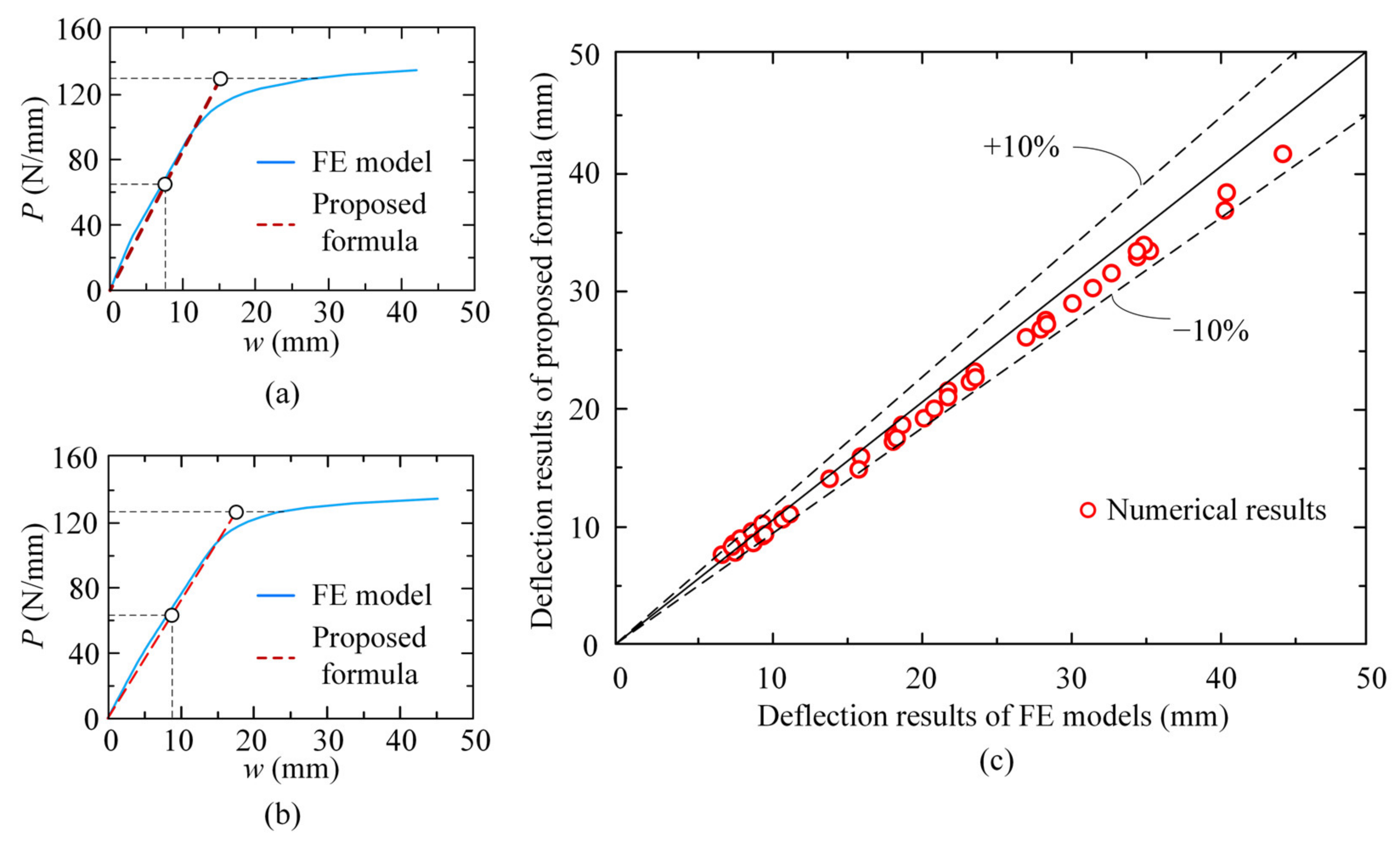
4.2. Comparison with FE Analysis of Frame Structures
5. Simplified Design Method
5.1. Simplified Method for Calculating Rotation Constraint Stiffness
5.2. Simplified Design Formula for Calculating Vertical Deflection
- Based on the elastic analysis results of a structural design software, the lengths of the negative moment regions, lcr1 and lcr2, can be obtained from the internal force distributions. Subsequently, the negative moment region factor, αcr, can be calculated using Equation (25);
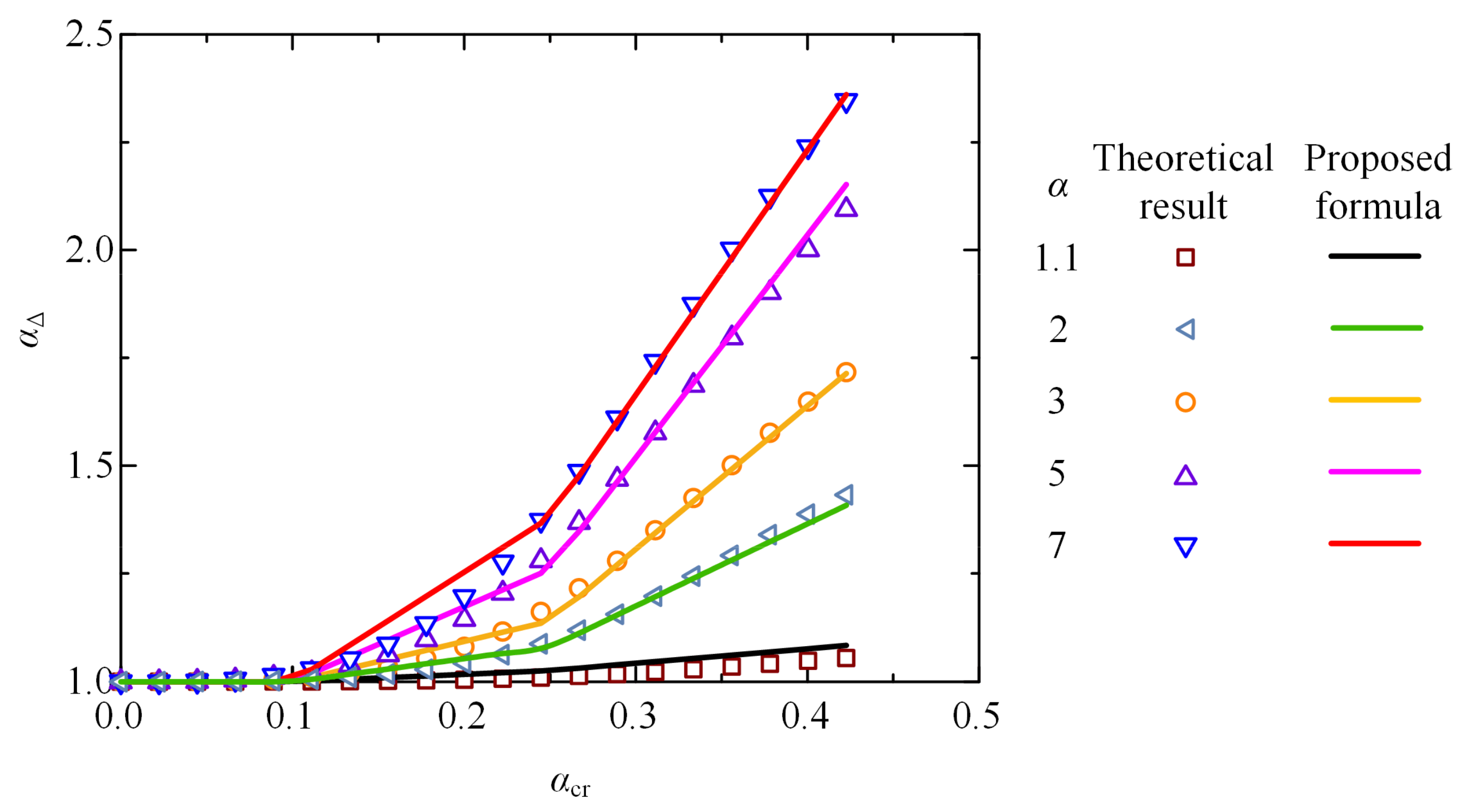
- By substituting parameter αcr and stiffness amplification coefficient α into Equation (34), the vertical deflection correction factor, αΔ, can be obtained;
- Utilizing the deformation results of the elastic analysis, the design value of the vertical deflection of the composite frame beam is determined using the proposed formula in Equation (32).
6. Conclusions
- For a composite frame beam under uniform vertical loading, the rotation restraint stiffness at the two beam ends has a significant effect on its vertical deflection and internal force distribution, which should be elaborately considered when calculating its equivalent flexural stiffness;
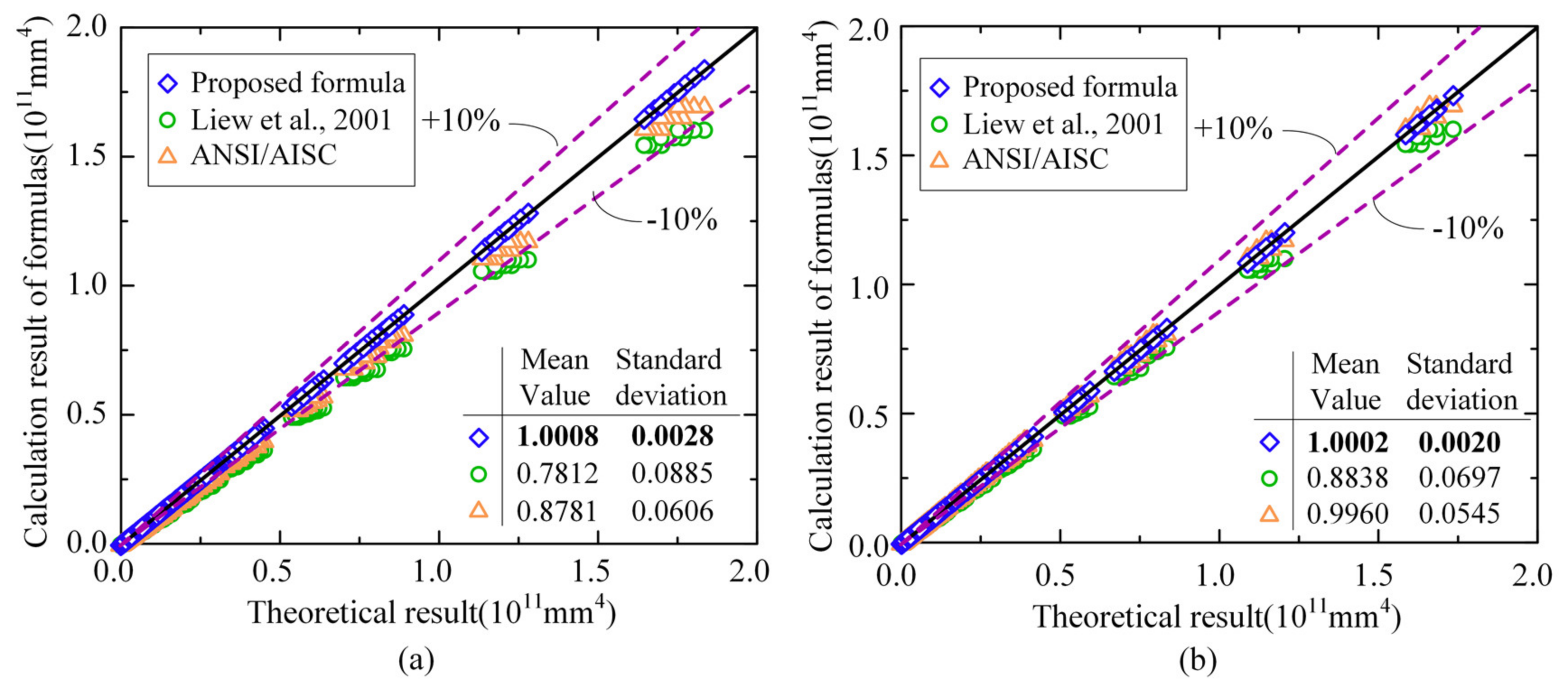
- By considering the boundary constraint conditions at the beam ends, the proposed formula for calculating the equivalent flexural stiffness can reasonably describe the deformation mechanism of a composite frame beam, presenting a higher calculation accuracy than those of the recommended formulas in ANSI/AICS and by Liew et al.;
- By comparing with the non-linear FE analysis results of multiple entire frame structures, the accuracy and reliability of the proposed formula is further validated. The vertical deflections in the service stage calculated using the proposed formula agree well with those obtained from the entire process load–displacement curves in the FE analysis;
- Utilising the internal force distribution of a frame beam by elastic analysis, a simplified, but effective design method is proposed to calculate the vertical deflection. The design procedure is based on the deflection correction of the non-cracking analysis results, which is demonstrated to capture the influence of the complex boundary conditions and can be easily used in the practical design of composite frame beams.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bursi, O.S.; Gramola, G. Behaviour of composite substructures with full and partial shear connection under quasi-static cyclic and pseudo-dynamic displacements. Mater. Struct. 2000, 33, 154–163. [Google Scholar] [CrossRef]
- Udagawa, K.; Mimura, H. Behavior of composite beam frame by pseudodynamic testing. J. Struct. Eng. ASCE 1991, 117, 1317–1335. [Google Scholar] [CrossRef]
- Zona, A.; Barbato, M.; Conte, J.P. Nonlinear seismic response analysis of steel–concrete composite frames. J. Struct. Eng. 2008, 134, 986–997. [Google Scholar] [CrossRef]
- Nakashima, M.; Matsumiya, T.; Suita, K.; Zhou, F. Full-scale test of composite frame under large cyclic loading. J. Struct. Eng. 2007, 133, 297–304. [Google Scholar] [CrossRef]
- Wang, Y.H.; Nie, J.G.; Cai, C.S. Numerical modeling on concrete structures and steel–concrete composite frame structures. Comp. Part B Eng. 2013, 51, 58–67. [Google Scholar] [CrossRef]
- Ramnavas, M.P.; Patel, K.A.; Chaudhary, S.; Nagpal, A.K. Service load analysis of composite frames using cracked span length frame element. Eng. Struct. 2017, 132, 733–744. [Google Scholar] [CrossRef]
- Akbas, S.D. Large deflection analysis of a fiber reinforced composite beam. Steel Compos. Struct. 2018, 27, 567–576. [Google Scholar] [CrossRef]
- Chiorean, C.G.; Buru, S.M. Practical nonlinear inelastic analysis method of composite steel-concrete beams with partial composite action. Eng. Struct. 2017, 134, 74–106. [Google Scholar] [CrossRef]
- Kirkland, B.; Uy, B. Behaviour and design of composite beams subjected to flexure and axial load. Steel Compos. Struct. 2015, 19, 615–633. [Google Scholar] [CrossRef]
- Mirambell, E.; Bonilla, J.; Bezerra, L.M.; Clero, B. Numerical study on the deflections of steel-concrete composite beams with partial interaction. Steel Compos. Struct. 2021, 38, 67–78. [Google Scholar] [CrossRef]
- Vasdravellis, G.; Uy, B. Shear strength and moment-shear interaction in steel-concrete composite beams. J. Struct. Eng. 2014, 140, 04014084. [Google Scholar] [CrossRef]
- Kirkland, B.; Kim, P.; Uy, B.; Vasdravellis, G. Moment–shear–axial force interaction in composite beams. J. Constr. Steel. Res. 2015, 114, 66–76. [Google Scholar] [CrossRef]
- Soto, A.G.; Caldentey, A.P.; Peiretti, H.C.; Benitez, J.C. Experimental behaviour of steel-concrete composite box girders subject bending, shear and torsion. Eng. Struct. 2020, 206, 110169. [Google Scholar] [CrossRef]
- Newmark, N.M. Test and analysis of composite beams with incomplete interaction. Proc. Soc. Exp. Stress Anal. 1951, 9, 75–92. [Google Scholar]
- Lawson, R.M.; Lam, D.; Aggelopoulos, E.S.; Nellinger, S. Serviceability performance of steel–concrete composite beams. Proc. Inst. Civil Eng. Struct. Build. 2017, 170, 98–114. [Google Scholar] [CrossRef] [Green Version]
- Ding, F.X.; Liu, J.; Liu, X.M.; Guo, F.Q.; Jiang, L.Z. Flexural stiffness of steel-concrete composite beam under positive moment. Steel Compos. Struct. 2016, 20, 1369–1389. [Google Scholar] [CrossRef]
- Liu, J.; Ding, F.X.; Liu, X.M.; Yu, Z.W. Study on flexural capacity of simply supported steel-concrete composite beam. Steel Compos. Struct. 2016, 21, 829–847. [Google Scholar] [CrossRef]
- Liu, J.; Ding, F.X.; Liu, X.M.; Yu, Z.W.; Tan, Z.; Huang, J.W. Flexural Capacity of Steel-Concrete Composite Beams under Hogging Moment. Adv. Civ. Eng. 2019, 2019, 3453274. [Google Scholar] [CrossRef] [Green Version]
- Tao, M.X.; Nie, J.G. Fiber beam-column model considering slab spatial composite effect for nonlinear analysis of composite frame systems. J. Struct. Eng. 2013, 140, 04013039. [Google Scholar] [CrossRef]
- Zhang, Q.H.; Jia, D.L.; Bao, Y.; Dong, S.; Cheng, Z.Y.; Bu, Y.Z. Flexural behavior of steel–concrete composite beams considering interlayer slip. J. Struct. Eng. 2019, 145, 04019084. [Google Scholar] [CrossRef]
- Lou, T.J.; Wu, S.S.; Karavasilis, T.L.; Chen, B. Long-term deflection prediction in steel-concrete composite beams. Steel Compos. Struct. 2021, 39, 21–33. [Google Scholar] [CrossRef]
- Fragiacomo, M.; Amadio, C.; Macorini, L. Finite-element model for collapse and long-term analysis of steel–concrete composite beams. J. Struct. Eng. 2004, 130, 489–497. [Google Scholar] [CrossRef]
- Wang, Y.H.; Yu, J.; Liu, J.P.; Zhou, B.X.; Chen, Y.F. Experimental study on assembled monolithic steel-prestressed concrete composite beam in negative moment. J. Constr. Steel. Res. 2020, 167, 105667. [Google Scholar] [CrossRef]
- Shamass, R.; Cashell, K.A. Behaviour of composite beams made using high strength steel. Struct. 2017, 12, 88–101. [Google Scholar] [CrossRef]
- Shi, Y.; Yang, K.D.; Guan, Y.; Yao, X.M.; Xu, L.; Zhang, H.B. The flexural behavior of cold-formed steel composite beams. Eng. Struct. 2020, 218, 110819. [Google Scholar] [CrossRef]
- Yang, T.; Liu, S.Y.; Qin, B.X.; Liu, Y.Q. Experimental study on multi-bolt shear connectors of prefabricated steel-concrete composite beams. J. Constr. Steel. Res. 2020, 173, 106260. [Google Scholar] [CrossRef]
- Nie, J.G.; Pan, W.H.; Tao, M.X.; Zhu, Y.Z. Experimental and numerical investigations of composite frames with innovative composite transfer beams. J. Struct. Eng. 2017, 143, 04017041. [Google Scholar] [CrossRef]
- GB 50017-2017. Code for Design of Steel Structures; Ministry of Housing and Urban-Rural Development of the People’s Republic of China: Beijing, China, 2017. (In Chinese)
- EN 1994-1-1:2004, Eurocode 4: Design of Composite Steel and Concrete Structures–Part 1-1: General Rules and Rules for Buildings; European Committee for Standardization: Brussels, Belgium, 2004.
- ANSI/AISC 360-10, AISC Committee, Specification for Structural Steel Buildings; American Institute of Steel Construction: Chicago, IL, America, 2010.
- Liew, J.Y.R.; Chen, H.; Shanmugam, N.E. Inelastic analysis of steel frames with composite beams. J. Struct. Eng. 2001, 127, 194–202. [Google Scholar] [CrossRef]
- Nie, J.G.; Tao, M.X.; Cai, C.S.; Chen, G. Modeling and investigation of elasto-plastic behavior of steel–concrete composite frame systems. J. Constr. Steel Res. 2011, 67, 1973–1984. [Google Scholar] [CrossRef]
- JGJ 138-2016, Code for Design of Composite Structures; Ministry of Housing and Urban-Rural Development of the People’s Republic of China: Beijing, China, 2016. (In Chinese)
- Nie, J.G.; Tao, M.X. Slab spatial composite effect in composite frame systems. I: Effective width for ultimate loading capacity. Eng. Struct. 2012, 38, 185–199. [Google Scholar] [CrossRef]
- Nie, J.G.; Tao, M.X. Slab spatial composite effect in composite frame systems. II: Equivalent stiffness and verifications. Eng. Struct. 2012, 38, 171–184. [Google Scholar] [CrossRef]
- BS EN 1998-1:2004. Eurocode 8: Design of Structures for Earthquake Resistance–Part 1: General Rules, Seismic Actions and Rules for Buildings; European Committee for Standardization: Brussels, Belgium, 2004.
- Tao, M.X.; Nie, J.G. Element mesh, section discretization and material hysteretic laws for fiber beam–column elements of composite structural members. Mater. Struct. 2015, 48, 2521–2544. [Google Scholar] [CrossRef]
- Rusch, H. Researches toward a general flexural theory for structural concrete. J. Am. Concr. Inst. 1960, 57, 1–28. [Google Scholar]
- Esmaeily, A.; Xiao, Y. Behavior of reinforced concrete columns under variable axial loads: Analysis. ACI Struct. J. 2005, 102, 736–744. [Google Scholar]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, M.-X.; Li, Z.-A.; Zhou, Q.-L.; Xu, L.-Y. Analysis of Equivalent Flexural Stiffness of Steel–Concrete Composite Beams in Frame Structures. Appl. Sci. 2021, 11, 10305. https://doi.org/10.3390/app112110305
Tao M-X, Li Z-A, Zhou Q-L, Xu L-Y. Analysis of Equivalent Flexural Stiffness of Steel–Concrete Composite Beams in Frame Structures. Applied Sciences. 2021; 11(21):10305. https://doi.org/10.3390/app112110305
Chicago/Turabian StyleTao, Mu-Xuan, Zi-Ang Li, Qi-Liang Zhou, and Li-Yan Xu. 2021. "Analysis of Equivalent Flexural Stiffness of Steel–Concrete Composite Beams in Frame Structures" Applied Sciences 11, no. 21: 10305. https://doi.org/10.3390/app112110305
APA StyleTao, M.-X., Li, Z.-A., Zhou, Q.-L., & Xu, L.-Y. (2021). Analysis of Equivalent Flexural Stiffness of Steel–Concrete Composite Beams in Frame Structures. Applied Sciences, 11(21), 10305. https://doi.org/10.3390/app112110305