
IoT Helper : A Lightweight and Extensible Framework for Fast-Prototyping IoT Architectures





Abstract
:1. Introduction
- Industrial machinery is not always equipped with sensors and/or actuators. Even when some sensors/actuators are available, they may not exhaust the needs of all possible IIoT scenarios.
- When sensors are available, they tend to be quite expensive and often difficult to configure.
- Finally, industrial sensors are usually not cloud-enabled and, therefore, fail to meet the Big Data requirements discussed above.
1.1. Contributions
- We introduce a new framework for monitoring and controlling embedded devices. The framework is based on a generic architecture that can be used with many classes of sensors and actuators. Thus, the framework can be effectively used to facilitate the development of intelligent applications in domotics and industry.
- The system requires minimum configuration and virtually no application logic in order to remotely access the data and control devices. As a consequence, application developers can focus on the development of higher-level applications that use data collected by IoT Helper in order to gain insights.
- IoT Helper is cloud-enabled by default. It is based on a publish-and-subscribe protocol for decoupling the production of data from its consumption and may leverage public-cloud platforms in order to scale to very large volumes of data. At the same time, coherently with its agile inspiration, the framework also allows for on-premise deployments that can be preferred in some scenarios due to data protection and privacy concerns.
- Declarative configuration and architectural flexibility are achieved by means of an abstract representation of the components of the frameworks, i.e., the embedded hardware, sensors, actuators, message endpoints and message formats. This conceptualization, described in more detail in the following sections, is a crucial component of our implementation.
- Finally, IoT Helper is based on inexpensive, open-source components from the Arduino [5] platform. This significantly lowers costs and adoption times and concretely fosters a more agile approach to IoT and IIoT. In this paper, we discuss how the choices made in designing the framework help users to quickly prototype working solutions and to test them. Then, after initial tests are completed, a final development phase of the missing app components can be started. During this phase, Arduino also allows for industrializing the production of embedded devices for the production phase, thus, further lowering costs.
- In the paper we present two concrete application scenarios: The first one is a typical domotics application for controlling the fan of a fireplace extractor chimney. The second one is a complex industrial application with respect to monitoring welding pliers of a robot arm. In addition to these, we report comprehensive experimental results to study the scalability of our framework. In fact, one of the main questions we intend to investigate in this paper is what level of scalability can be achieved with a lean generic framework based on inexpensive components such as ours. We consider the answer to this question an important contribution of the paper because it proves that IIoT-enabling techologies can now be considered as a commodity; therefore, users may be more ambitious in experimenting with their usage.
1.2. Organization of the Paper
2. Related Work
- Embedded Systems Modularity, interoperability and real-time orientation are considered as primary requirements for smart factories [8]. Modularity is important because each subsystem is designed to perform highly specific tasks, but, at the same time, it should be able to be combined with other subsystems in order to extend its actions. Interoperability is mandatory in order for different subsystems to exchange information among each other. Real-time data analysis is crucial in order to quickly change production configurations and to react to events.
- Classification of application scenarios and architectures. Most of the proposed solutions are domain-specific, ranging from performance evaluation of employees [12] and supply-chain management [13] to production monitoring [14] using SOA [15] architectures. Early efforts have been made to generalize environmental monitoring applications [16]. Indeed, IIoT [2] differs from IoT in two several respects:
- The main goal of IIoT is the interconnection of industrial machinery rather than human-to-machine interaction;
- IIoT assumes the presence of a structured, centralized network in which most of the nodes—i.e., machines—are fixed and known in advance; therefore, there is little to no focus on extensible network architectures in which peers may freely join and leave;
- IIoT is usually deployed in mission-critical scenarios in which data integrity and preservation are a primary concern.
- The first type is the traditional on-premise or cloud-based architecture where data from edges nodes are directly processed and managed in servers, either locally or in the cloud. This category of solutions that is still the most widely adopted suffers from latency problems in real-time applications with very-high volumes of data due to the latency of sending the data to servers [17] and, therefore, might be unsuitable for some scenarios in which data must be processed in real time.
- The alternative is edge computing, where data are processed and consumed directly in edge nodes. This solves the latency problem but incurs other limitations. In fact, edge nodes suffer from low or limited resources that limit computational power.
- A further alternative is fog computing where computational tasks are demanded to intermediary nodes in the network. Edge nodes produce data. Intermediary nodes pre-process and consume data for real-time analysis and then send processed data to the cloud for further analysis or storage.
- Communication Protocols. Multiple protocols [18] were proposed to address the problem of communicating among modules of an IoT/IIoT application. Broadly speaking, it is possible to group protocols into two main categories, as described below.
- Client-Server protocols work in a point-to-point fashion and require direct communication between modules. To provide an example, in order to obtain the reading of a sensor, a client app needs to contact the embedded hardware directly through the network. The main ones are XMPP and CoAP. XMPP (Extensible Messaging and Presence Protocol) is based on the exchange of XML messages. It is widely used in device-to-people communication such as control remote devices. CoAP (Constrained Application Protocol) relies on REST messages. It is used on low power consumption devices and is recommended in scenarios with a low number of messages exchanged. These protocols are easier to implement since they do not require the introduction of mediators within the architecture but show serious limitations in terms of flexibility and scalability in real-time applications [19,20]. On the one side, they introduce significant overhead in those cases in which multiple application modules—e.g., different instances of a mobile–client app—need to communicate with the base embedded system. On the other side, the case where real-time sensors generate volumes of data at a pace that applications cannot handle is very frequent due to the need to store values and to process and render them for users.
- An alternative is represented by Publish and Subscribe (P&S) protocols such as AMQP or the most widely used MQTT, the Message Queue Telemetry Transport protocol. P&S architectures systems exchange messages through middleware components called message brokers, where publishers push messages and subscribers read them. This obviously incurs more complexity in setting up the overall architecture, but it solves the problem of point-to-point protocols. In fact, brokers decouple the generation of messages from their actual handling, thus allowing for much higher scalability. MQTT exchanges messages using TCP. A permanent connection between the clients and the broker is established to exchange those messages through queues or channels. MQTT is widely used in data communication scenarios such as data collection. AMQP (Advanced Message Queuing Protocol) adds a security layer based on TLS. It is often used for data analysis.
- Comparison to Other Solutions. As discussed, many alternatives exist on the market both in terms of embedded devices, protocols and server or cloud-based solutions. Many of them require coding specific application logic for the problem at hand. On the contrary, as it will be discussed in the following sections, a distinguished feature of our approach is that the framework can be configured in a declarative manner by specifying sensors, i.e., input values, and actuators, i.e., actions to be performed on the hardware without any line of code.
- Greengrass requires the adoption of the AWS cloud platform, while our framework can also be deployed on-premise; this is an important requirement in many industrial applications in which security and data protections are primary concerns.
- On the contrary, BB400 provides several connectors and also allows for configuring on-premises architectures. Still, while IoT Helper uses a declarative approach to define inputs and outputs and hides the complexity of the underlying architecture (message format, topics, MQQT brokers and so on), leaving the user to focus on the client side only, the Brainboxes framework requires the user to explicitly define the communication flow between the edge node and the server using Node-RED, a browser-based visual flow editor based on JavaScript.
- One clear difference is represented by the computing power of the required embedded devices: Greengrass relies on the Java platform and, therefore, needs at least a Raspberry Pi device; BB400 uses a Debian Linux distribution and, therefore, runs on a combination of both a Raspberry Pi and and Arduino. In both cases, costs are higher than those incurred by our framework. In fact, a BB400 device is one order of magnitude more expensive than our solution. Since it is typically needed to configure many of these devices, often in the order of the dozens, these differences in costs may be significant.
- Another important aspect is that there is no available data about scalability of these platforms. On the contrary, a major goal of this paper is to investigate the scalability limit that can be reached with inexpensive hardware. In fact, we consider this one of the main contributions of the paper.
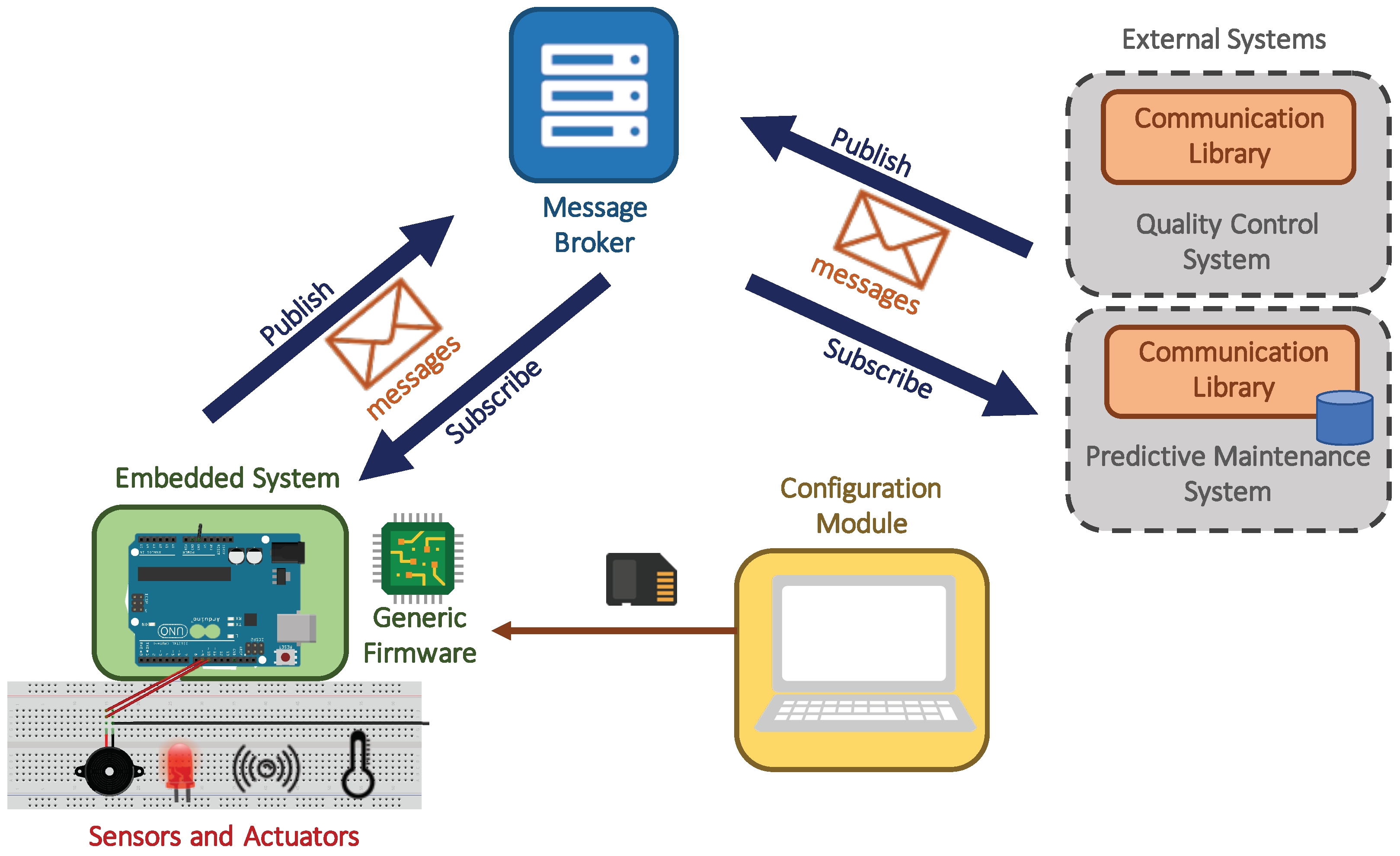
3. System Architecture
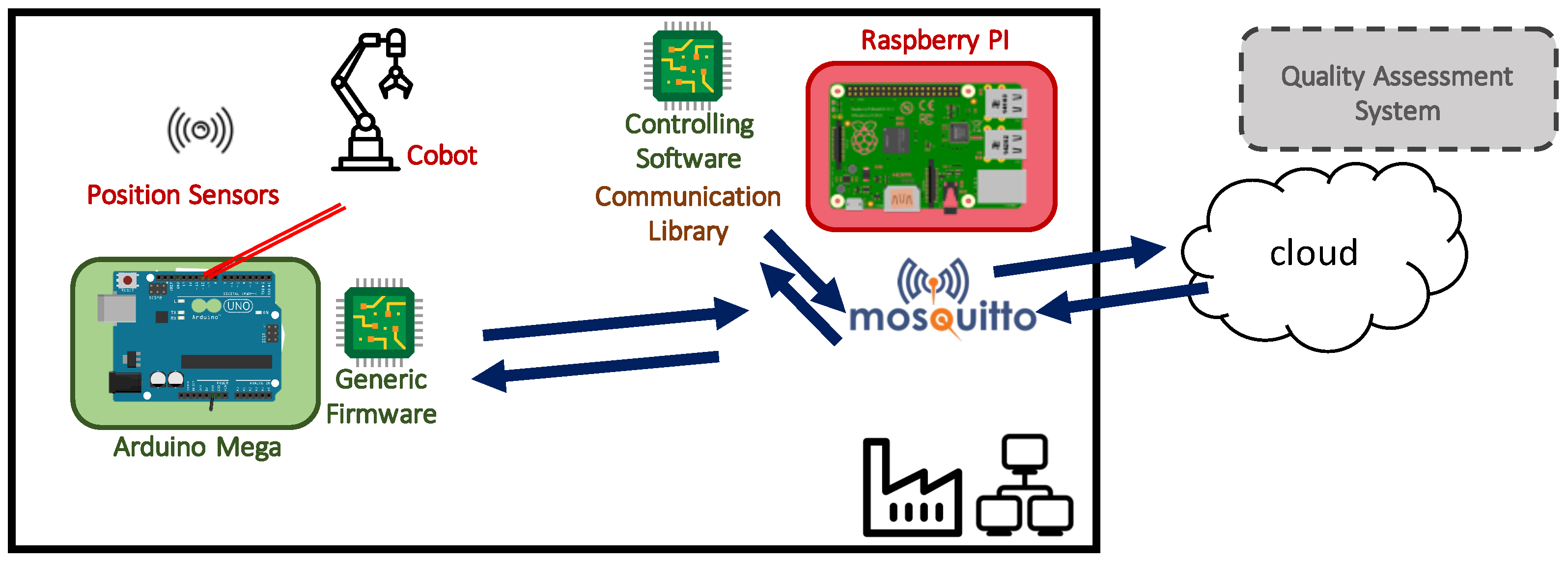
- An Embedded System that acts as the main controller of sensors and actuators deployed in the solution;
- A Configuration Module that allows users to configure and customize the various sensors and actuators;
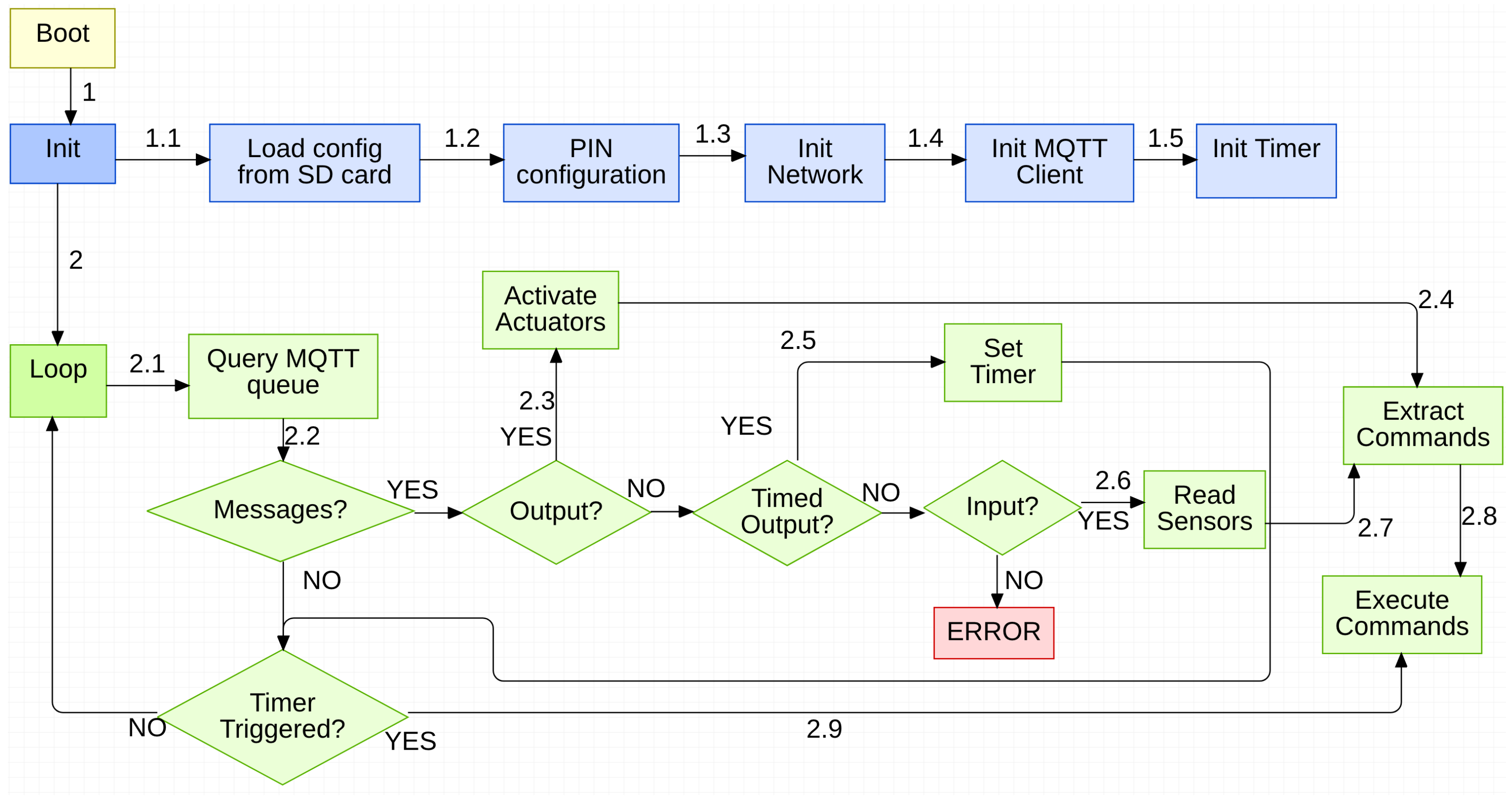
- A Generic Firmware to manage operations, also called commands on connected devices;
- A Message Broker module that decouples the embedded system from external processors in order to scale up to large volume of data.
- Read—read values of inputs . For example, read temperature and humidity values from the respective sensors.
- RepeatRead—read of inputs each n milliseconds. This is useful when we need continuous read operations with a fixed frequency. This command accepts a parameter t representing time in milliseconds. This command is used to regularly collect data from the Embedded System and allows one to minimize the number of requests sent to the system.
- Write—change values of output to to . For example, switch the LED on and set the speed of the fan to four.
- TimedWrite—change values of outputs after a fixed delay. For example, switch off the fan in two hours.
- Performance issues: The number of messages is directly dependent on the number of nodes in the architecture. Since in a common scenario several applications need to communicate with the embedded system, the latter needs to be able to handle multiple connections at the same time. This can be considered as the normal behavior of high-end servers. However, an embedded system, such as Arduino or Raspberry Pi, has limited concurrent capability. In such systems, every new connection will add considerable overhead to the system, with a result of unacceptable response time, especially in a real-time scenario;
- Network issues: In order to establish a direct connection, the embedded system must be reachable from external applications. If we consider a common domotics scenario, the embedded system will be connected to the local wireless network, and it can be easily reached by any other devices connected to the same network. However, to be visible to an external device, such as a smartphone connected through a mobile network, an external public IP address is needed, and the routing table of the local network needs to be properly configured. Both of this steps require complex operations that make the adoption of the system in small or home environments burdensome.
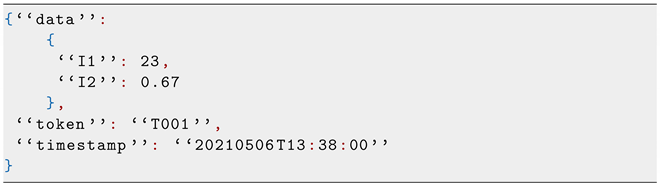
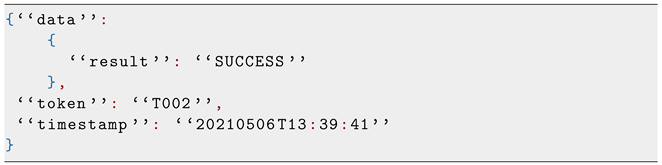
3.1. Data Model
- /COMMAND_NAME/LIST_OF_SENSORS_ACTUATORS&TOKEN
- COMMAND_NAME represents the requested action that we have already discussed, and the values are read, repeatedRead, write and timedWrite;
- LIST_OF_SENSORS_ACTUATORS represents the name of sensors and actuators to which we want to send the action. Sensors or actuators are separated by the special character “&.” Moreover, the name used is the one used in the configuration step;
- TOKEN represents a key to match different request–response pairs. Since communication is asynchronous, there is the need to correlate the response to the request. In real-life scenarios, multiple clients might send requests simultaneously, and since they will wait for the response on the same channel, they need to filter the response. For this reason, in the request, the client generates a unique (or random) token that will be included in the response.
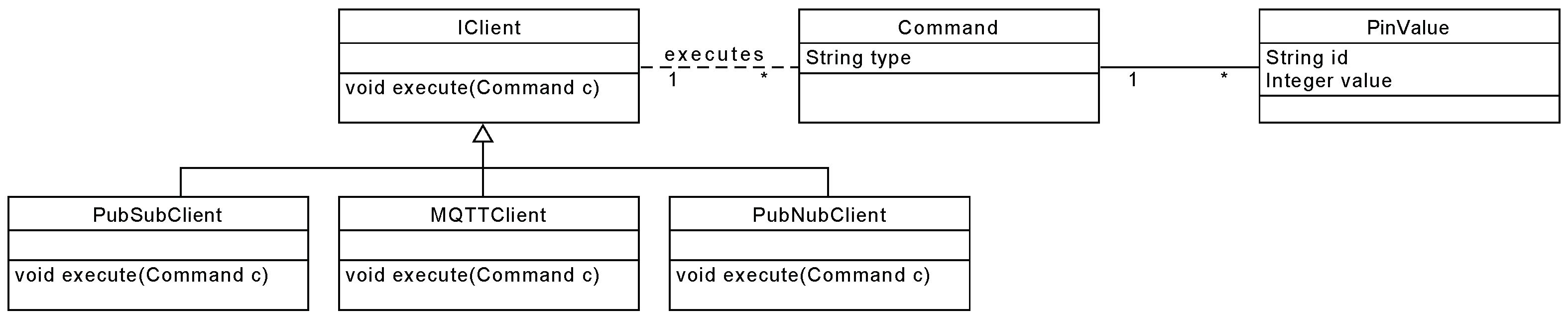
3.2. Support Library
4. Use Cases
4.1. Fan Control Scenario
- The additional hardware cannot be expensive in order to avoid a significant increase in the market price of the chimney;
- The chimney needs to be accessible both at home, i.e., from the local WiFi network, or from outside, i.e., from the internet;
- Configuration and installation steps need to be as easy as possible, without the need of an IT expert.
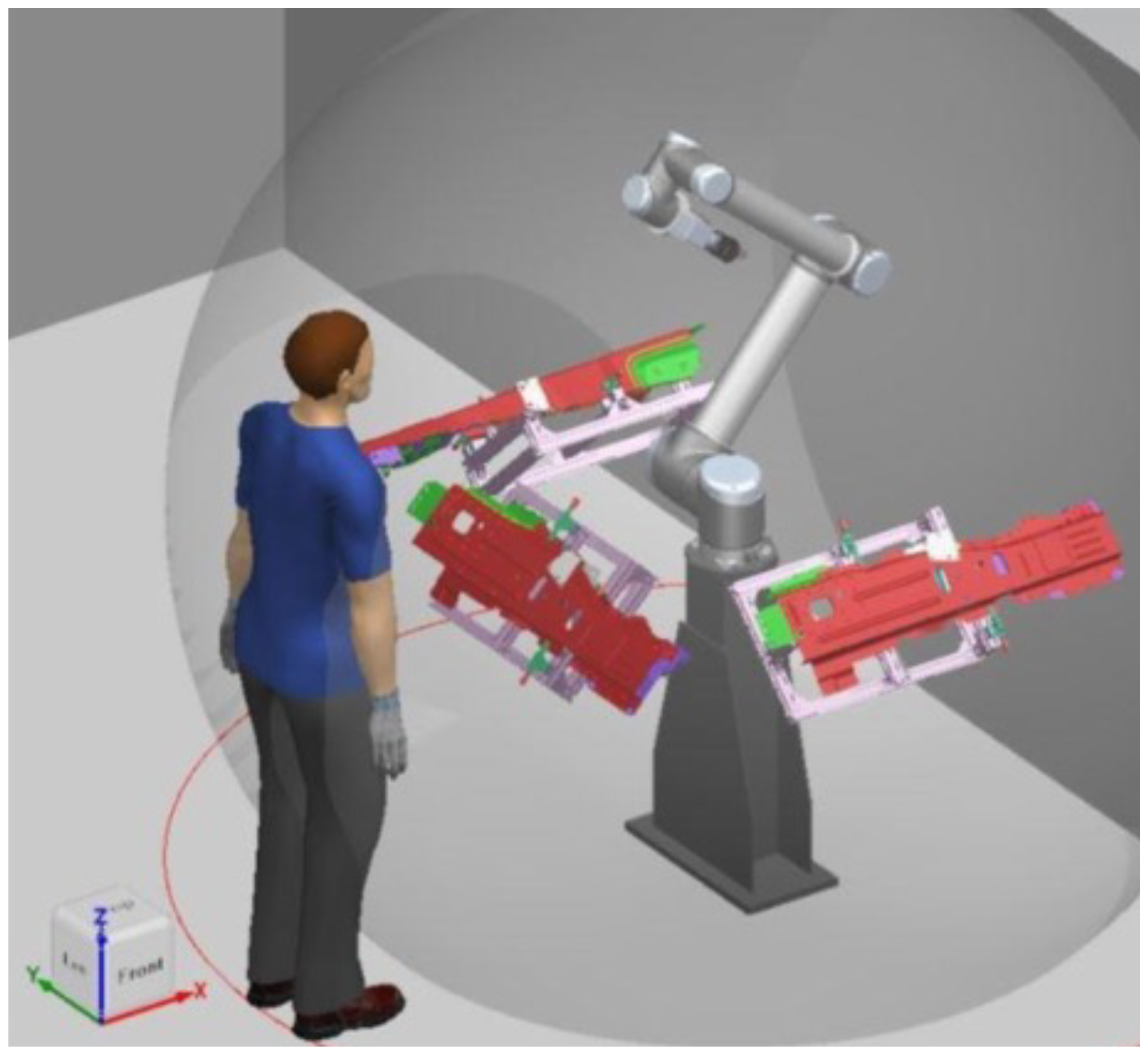
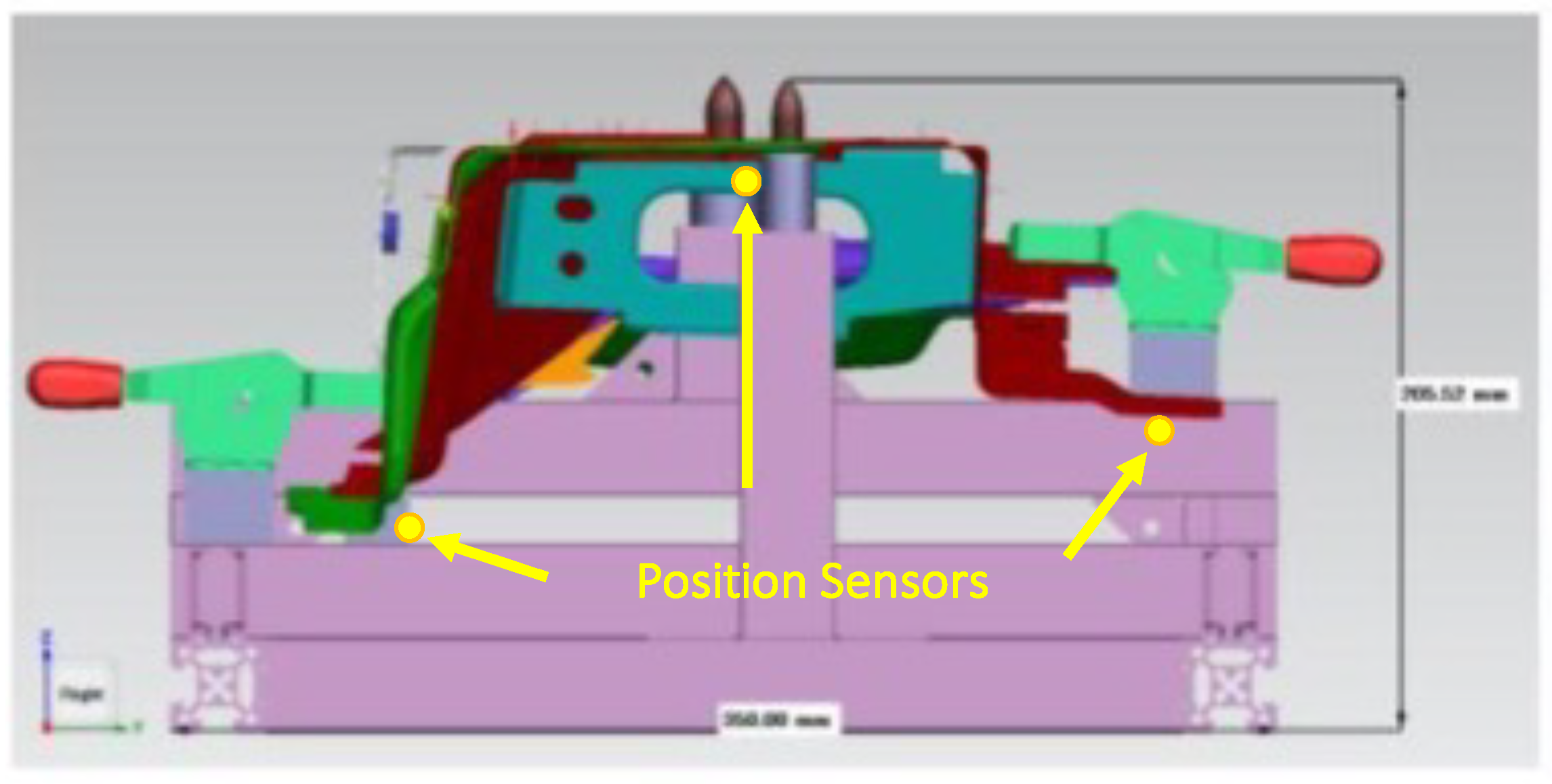
4.2. Quality Control Scenario
5. Experiments
- Our first goal is to investigate the capability of IoT Helper to collect potentially large volumes of data in real-time applications.
- Our second goal is to study scalability in terms of number of sensors, actuators and clients that IoT Helper can handle.
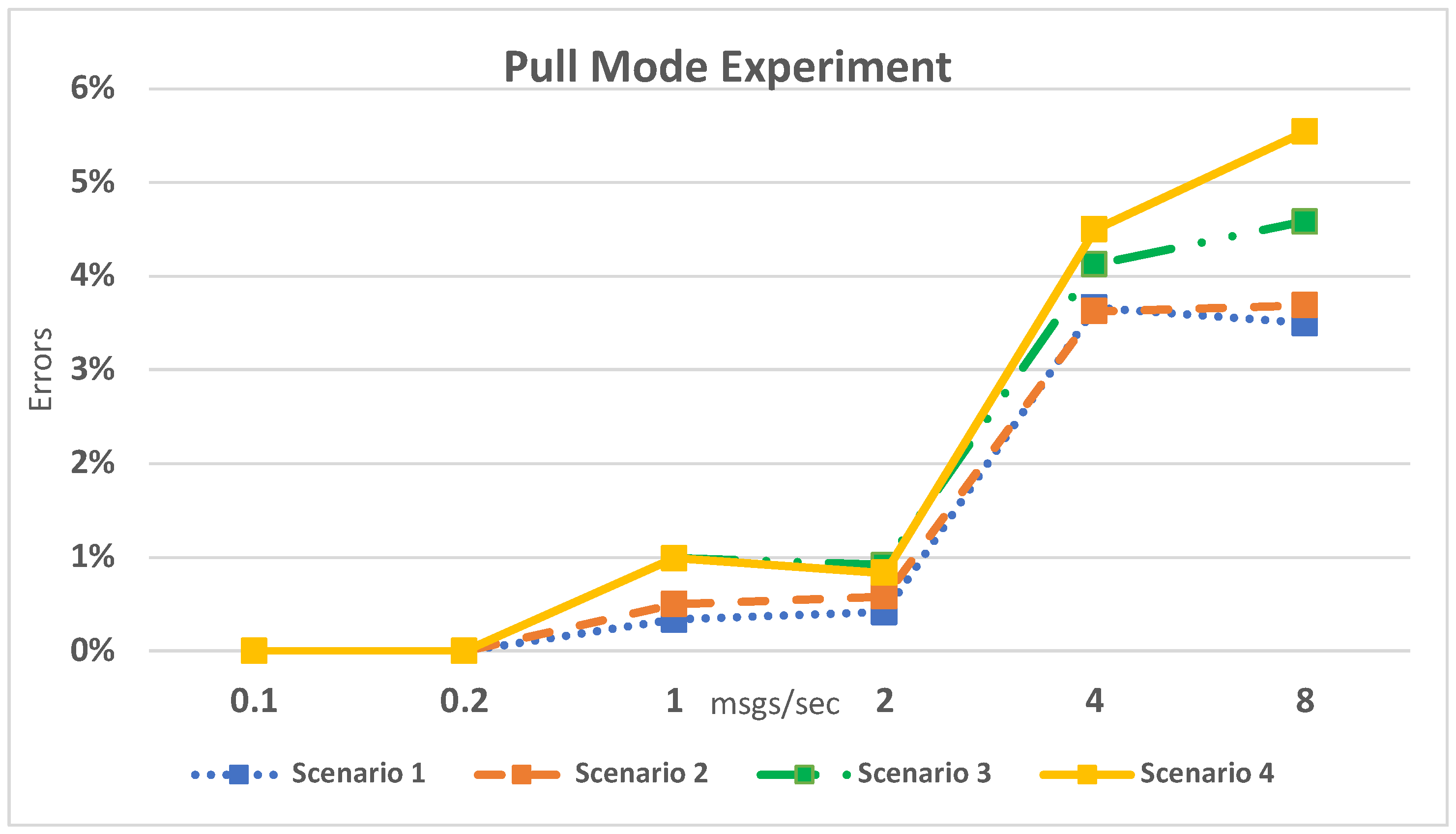
- Pull-Mode Experiments: These experiments measure performance in a data-collection scenario where a client application uses IoT Helper to collect increasingly high-volumes of data from sensors. We measured the number of messages sent from the embedded system to a client subscribed to the data channel.
- Command-Mode Experiments: These experiments measure the performances of IoT Helper in a scenario where clients send commands and receive data. Our goal is to evaluate the number of clients and commands that the embedded system is able to effectively handle.
5.1. Experimental Environment
- The embedded system was based on an Arduino Mega 2560 shield that can be bought on the Web for much less than 50 US dollars;
- We plugged several LEDs into the Arduino shield to simulate actuators and a series of different sensors, analog and digital (temperature, potentiometer, photoresistor and distance sensors), to collect data;
- The Message Broker was running locally on a docker MQTT image;
- We developed a Java application using the Support Library to simulate different clients: clients that perform repeated read operations and clients that send commands (read or write) periodically to the embedded system. The Java application also collect and stores performance stats.
- We connected all nodes in a local WAN.
5.2. Pull-Mode Experiments
- Scenario 1 contains only one sensor;
- Scenario 2 contains two sensors and two actuators;
- Scenario 3 contains three sensors and three actuators;
- Scenario 4 contains five sensors and five actuators;
5.3. Command-Mode Experiments
- Scenario 1 with two concurrent clients;
- Scenario 2 with three concurrent clients;
- Scenario 3 with four concurrent clients;
- Scenario 4 with five concurrent clients.
5.4. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Sanders, A.; Elangeswaran, C.; Wulfsberg, J.P. Industry 4.0 implies lean manufacturing: Research activities in industry 4.0 function as enablers for lean manufacturing. J. Ind. Eng. Manag. 2016, 9, 811–833. [Google Scholar] [CrossRef] [Green Version]
- Sisinni, E.; Saifullah, A.; Han, S.; Jennehag, U.; Gidlund, M. Industrial internet of things: Challenges, opportunities, and directions. IEEE Trans. Ind. Inform. 2018, 14, 4724–4734. [Google Scholar] [CrossRef]
- Boyes, H.; Hallaq, B.; Cunningham, J.; Watson, T. The industrial internet of things (IIoT): An analysis framework. Comput. Ind. 2018, 101, 1–12. [Google Scholar] [CrossRef]
- Cai, H.; Xu, B.; Jiang, L.; Vasilakos, A.V. IoT-Based Big Data Storage Systems in Cloud Computing: Perspectives and Challenges. IEEE Internet Things J. 2017, 4, 75–87. [Google Scholar] [CrossRef]
- D’Ausilio, A. Arduino: A low-cost multipurpose lab equipment. Behav. Res. Methods 2012, 44, 305–313. [Google Scholar] [CrossRef]
- Babun, L.; Denney, K.; Celik, Z.B.; McDaniel, P.; Uluagac, A.S. A survey on IoT platforms: Communication, security, and privacy perspectives. Comput. Netw. 2021, 192, 108040. [Google Scholar] [CrossRef]
- Laghari, A.A.; Wu, K.; Laghari, R.A.; Ali, M.; Khan, A.A. A Review and State of Art of Internet of Things (IoT). Arch. Comput. Methods Eng. 2021, 28, 1–19. [Google Scholar]
- Mabkhot, M.M.; Al-Ahmari, A.M.; Salah, B.; Alkhalefah, H. Requirements of the smart factory system: A survey and perspective. Machines 2018, 6, 23. [Google Scholar] [CrossRef] [Green Version]
- Heath, S. Embedded Systems Design; Elsevier: Amsterdam, The Netherlands, 2002. [Google Scholar]
- Pineño, O. ArduiPod Box: A low-cost and open-source Skinner box using an iPod Touch and an Arduino microcontroller. Behav. Res. Methods 2014, 46, 196–205. [Google Scholar] [CrossRef]
- Spinelli, G.M.; Gottesman, Z.L.; Deenik, J. A low-cost Arduino-based datalogger with cellular modem and FTP communication for irrigation water use monitoring to enable access to CropManage. HardwareX 2019, 6, e00066. [Google Scholar] [CrossRef]
- Kaur, N.; Sood, S.K. Cognitive decision making in smart industry. Comput. Ind. 2015, 74, 151–161. [Google Scholar] [CrossRef]
- Verdouw, C.; Beulens, A.J.; Reijers, H.A.; van der Vorst, J.G. A control model for object virtualization in supply chain management. Comput. Ind. 2015, 68, 116–131. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Luo, H.; Xie, P.X.; Feng, X.Q.; Du, R.Y. Product whole life-cycle and omni-channels data convergence oriented enterprise networks integration in a sensing environment. Comput. Ind. 2015, 70, 23–45. [Google Scholar] [CrossRef]
- Perrey, R.; Lycett, M. Service-oriented architecture. In Proceedings of the 2003 Symposium on Applications and the Internet Workshops, Orlando, FL, USA, 27–31 January 2003; pp. 116–119. [Google Scholar]
- Dobrilovic, D.; Brtka, V.; Stojanov, Z.; Jotanovic, G.; Perakovic, D.; Jausevac, G. A Model for Working Environment Monitoring in Smart Manufacturing. Appl. Sci. 2021, 11, 2850. [Google Scholar] [CrossRef]
- Bierzynski, K.; Escobar, A.; Eberl, M. Cloud, fog and edge: Cooperation for the future? In Proceedings of the 2017 Second International Conference on Fog and Mobile Edge Computing (FMEC), Valencia, Spain, 8–11 May 2017; pp. 62–67. [Google Scholar]
- Ponnusamy, K.; Rajagopalan, N. Internet of things: A survey on IoT protocol standards. Prog. Adv. Comput. Intell. Eng. 2018, 564, 651–663. [Google Scholar]
- Adler, R. Distributed coordination models for client/server computing. Computer 1995, 28, 14–22. [Google Scholar] [CrossRef]
- Adebayo, O.; Neilson, J.; Petriu, D. A Performance Study of Client-Broker-Server Systems. In Proceedings of the 1997 conference of the Centre for Advanced Studies on Collaborative Research, CASCON ’97, Toronto, ON, Canada, 10–13 November 1997; IBM Press: Indianapolis, IN, USA; p. 1. [Google Scholar]
- Eugster, P.T.; Felber, P.A.; Guerraoui, R.; Kermarrec, A.M. The Many Faces of Publish/Subscribe. Acm Comput. Surv. 2003, 35, 114–131. [Google Scholar] [CrossRef] [Green Version]
- Information Technology—Message Queuing Telemetry Transport (MQTT) v3.1.1; Standard; International Organization for Standardization: Geneva, Switzerland, 2016.
- Light, R.A. Mosquitto: Server and client implementation of the MQTT protocol. J. Open Source Softw. 2017, 2, 265. [Google Scholar] [CrossRef]
- Hunkeler, U.; Truong, H.L.; Stanford-Clark, A. MQTT-S—A publish/subscribe protocol for Wireless Sensor Networks. In Proceedings of the 2008 3rd International Conference on Communication Systems Software and Middleware and Workshops (COMSWARE’08), Bangalore, India, 6–10 January 2008; pp. 791–798. [Google Scholar]
- Bender, M.; Kirdan, E.; Pahl, M.O.; Carle, G. Open-Source MQTT Evaluation. In Proceedings of the 2021 IEEE 18th Annual Consumer Communications Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Rumbaugh, J.; Jacobson, I.; Booch, G. Unified Modeling Language Reference Manual, 2nd ed.; Addison-Wesley Professional: Boston, MA, USA, 2004. [Google Scholar]
- Capezza, C.; Centofanti, F.; Lepore, A.; Palumbo, B. Functional clustering methods for resistance spot welding process data in the automotive industry. arXiv 2020, arXiv:stat.AP/2007.09128. [Google Scholar]
- Raoelison, R.; Fuentes, A.; Rogeon, P.; Carré, P.; Loulou, T.; Carron, D.; Dechalotte, F. Contact conditions on nugget development during resistance spot welding of Zn coated steel sheets using rounded tip electrodes. J. Mater. Process. Technol. 2012, 212, 1663–1669. [Google Scholar] [CrossRef]
- Martín, Ó.; Pereda, M.; Santos, J.I.; Galán, J.M. Assessment of resistance spot welding quality based on ultrasonic testing and tree-based techniques. J. Mater. Process. Technol. 2014, 214, 2478–2487. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Typology | Name | Description | Pin | Values |
|---|---|---|---|---|---|
| Input | Digital | I1 | Temperature Sensor | 1 | |
| Output | Digital | O1 | Initialization Complete LED | 10 | {0,1} |
| Output | Analog | O2 | Fan Speed | 12 | {0–6} |
| Freq. | Expected | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 |
|---|---|---|---|---|---|
| 0.1 msgs/s | 60 | 60 | 60 | 60 | 60 |
| 0.2 msgs/s | 120 | 120 | 120 | 120 | 120 |
| 1 msgs/s | 600 | 598 | 597 | 596 | 595 |
| 2 msgs/s | 1200 | 1195 | 1193 | 1189 | 1190 |
| 4 msgs/s | 2400 | 2312 | 2313 | 2301 | 2292 |
| 8 msgs/s | 4800 | 4632 | 4623 | 4580 | 4534 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mecca, G.; Santomauro, M.; Santoro, D.; Veltri, E.
Mecca G, Santomauro M, Santoro D, Veltri E.
Mecca, Giansalvatore, Michele Santomauro, Donatello Santoro, and Enzo Veltri.
2021. "
Mecca, G., Santomauro, M., Santoro, D., & Veltri, E.
(2021).