1. Introduction
People with neuromuscular problems tend to lose a significant degree of autonomy in their daily life. To increase their mobility and independence, power wheelchairs may provide a valuable solution. Due to the deterioration in their physical ability, some of them become unable to use power wheelchairs. A potential solution is represented by robotic wheelchairs, which may provide appropriate human–robot interaction to people with severe motor impairments. They may include intelligent assistive navigation systems to help people according to their capabilities. This reflects the trend of the last years, where the employment of robots has changed from common usage within big manufacturing industries to locations such as people’s homes, hospitals, schools, hotels, restaurants, where the daily-life is carried out. As already happened several years ago with the diffusion of smartphones, we are assisting nowadays a similar wide spreading of the employment of robots for different tasks that will contribute to the development of new architectures, frameworks, and applications within the robotic domain. This happens because research in different Information and Communications Technology (ICT) areas has brought about several cutting-edge technologies that have shaped new robotic platforms. These platforms can be improved and extended into several automatic robotic applications to help people in several domains (e.g., health, education, engineering, entertainment).
Robots have also been used as socially assistive entities playing an important role for children with autism spectrum disorders [
1] and the active aging of older adults [
2]. Active aging is a current topic and has an enormous economic and social impact. According to [
3], in 2017, the EU-28’s total health-care spending was EUR 1.73 trillion. This accounted for around 10% of the EU GDP (Gross Domestic Product) where curative care and rehabilitative care services incurred on more than 50% of healthcare expenditure in the majority of European Union States. The total spending is expected to increase to 30% of GDP by 2060 [
4], especially due to the increase in the aging population. In particular, reduced functional independence and loneliness, unavoidable in older people, who lose connection with their friendship networks and for whom it is more complex to start new ones, can further increase isolation and depression leading to a further increase in healthcare costs [
5].
Nowadays, it is possible to program robots to the assistance and rehabilitation of people, and this improves the efficiency of the treatments and may alleviate care centers’ workloads, leading to a reduction in the costs for both the care centers and the patients [
6], reducing public and private long-term care and health-care expenditure. Furthermore, patients might even be treated in their homes, remotely, through telerehabilitation, thus reducing the inconvenience they experience.
Moreover, robots are being constantly and widely used in education [
7] and STEM (Science, Technology, Engineering and Mathematics) in general [
8], for example to allow people to practice languages. One example of a robot used within education is Elias [
9], a social robot that helps students learning foreign languages. Another one is the Makeblocks’ mBot [
10], which is able to teach kids to code.
To further engage users, a robot must be equipped with technology that can understand what the user is saying, and identify the hidden psychological traits like emotions, sarcasm and irony [
11].
To tackle this issue, the improvement of voice assistant technology has enabled several changes in life today. Google Assistant [
12], Apple’s Siri [
13], Microsoft’s Cortana [
14], Amazon’s Alexa [
15], Wit.ai [
16] and Snips.ai [
17], an open source and privacy oriented solution, are all well-known examples of digital voice assistants available on the market today. Such technologies can be used to access apps, services, and software, reading out the daily news, setting timers, or tapping into music playlists, and control IoT products and sensors. As each voice assistant makes available its own APIs for developers, it is possible to integrate their technology for several purposes and in different devices, robots included, bringing about new business opportunities in diverse areas [
18]. They can also be employed within robotic applications. In fact, they help the robots maximize engagement with the users by interacting with the surrounding world, for example by recognizing an object, by executing particular action commands or by helping the user control the domestic environment (e.g., smart homes).
A robotic wheelchair consists of a semi-autonomous controller with at least two agents, the user and the robotic wheelchair. They collaborate with each other during the navigation process. When speech disorders such as dysarthria or apraxia are not involved, voice assistant technology might increase the effectiveness of robotic wheelchairs, as the latter must recognize human intent in every step of the navigation process and make the right decisions. In recent years, several robotic wheelchair prototypes have been developed with the aim of improving the mobility capabilities of severely motor-disabled people [
19].
In line with all the aforementioned issues, in this paper we introduce an abstraction layer for Human–Robot Interaction (HRI) that employs voice assistant technologies. Such a design allows the robots to increase their interaction with the users by exploiting the power of recent voice assistant technologies. The proposed abstraction layer can be employed for any robotic platform including robotic wheelchairs.
In fact, one of its main advantages is that it is possible to embed and integrate any external software framework needing high computational power and that can reside in cloud systems or external servers, leaving the robot’s resources free and focused for the interaction with the users, which therefore results in more fluid and efficient interactions. We have also instantiated a use case out of the proposed general abstraction layer by choosing all the components with off-the-shelf tools and using an extended version of the humanoid NAO robot as the robotic platform to test its flexibility towards other kinds of robots. The proposed abstraction layer does not assume any technical choice but is a high-level design and can be instantiated as well in any robotic platform. The instance we developed is one possible way to implement the proposed design.
Therefore, the contributions of our paper are the following:
We propose an abstraction layer for HRI integrated with voice assistant technologies;
Out of the proposed abstraction layer, we instantiated a use case;
For the proposed use case, we show how to integrate voice assistant technologies (we used Google Assistant and its developer’s suite) with applications written for the used robotic platform; as such, we developed a Chess game by using Dialogflow [
20] of Google that we integrated within the proposed use case;
We illustrate the kinds of applications that can be developed for the proposed use case using and combining cloud or server platforms, DialogFlow, and Choregraphe, therefore leaving free the robotic platform’s resources;
We identified six different stakeholders and five scenarios to evaluate the proposed use case using the Software Architecture Analysis Method (SAAM) and used questionnaires to test the related user experience.
The remainder of our paper is organized as follows. In
Section 2 we report some related work regarding robotic wheelchairs and voice assistant technologies. In
Section 3 we introduce the overall abstraction layer and what type of applications can be included and integrated. The instance we developed is illustrated in
Section 4 where we also explain what is needed to create a new application. The applications that we developed and integrated into our use case are detailed in
Section 4.1. An evaluation of the use case is conducted in
Section 5. Finally,
Section 6 ends the paper with conclusions, ideas, and directions in which we are headed.
3. The Proposed Abstraction Layer
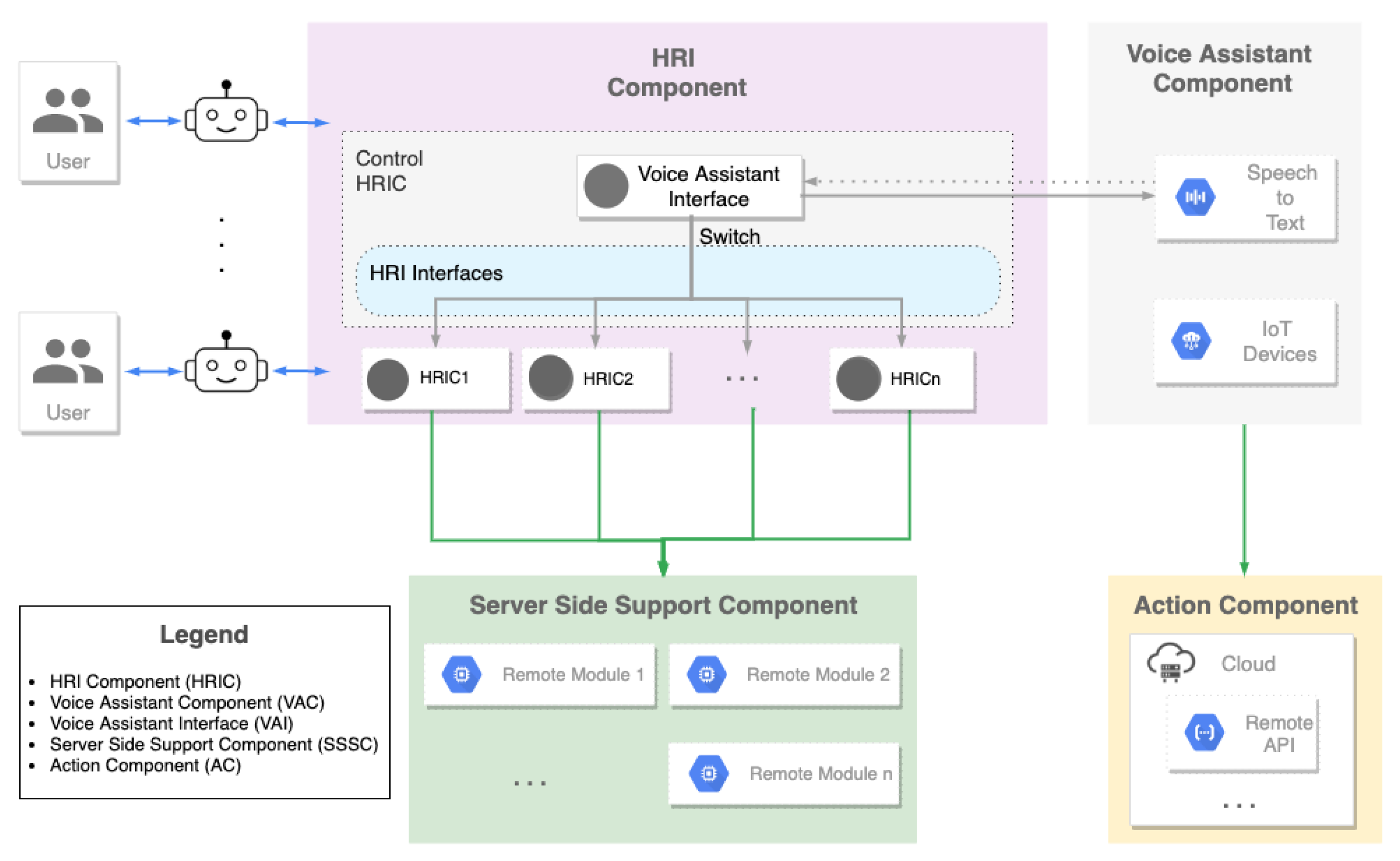
In this section, we describe the general abstraction layer we propose in this paper. It consists of four main components, detailed in the following subsections and shown in
Figure 1.
3.1. HRI Component (HRIC)
The HRI Component (HRIC) is responsible for the interaction of the robot with the users. As such, several HRICs are usually loaded into the robot, control its behaviors, and have access to its sensors and parts. They are usually lightweight programs because, usually, the robotic platform does not have many hardware resources available for extra-computation. A certain robotic application may be developed entirely through an HRIC if it does not require heavy computational power or huge storage capabilities.
There should always be a control HRIC that acts as a master and decides which other HRIC to run, depending on which command the user said (parsed by the Voice Assistant Component).
Three mandatory elements of the control HRIC are the following:
A voice assistant interface (VAI): this is an abstraction of the embedded voice assistant tool being used. It includes the software elements to receive the audio, analyze it, send it to the voice assistant cloud, and retrieve the answer. If an HRIC has been invoked (using a particular voice command), then a string is sent to the next element without forwarding the voice command to the voice assistant (i.e., the framework responsible for the control of HRICs takes over and internally handles the commands without forwarding to the voice assistant).
Switch application: when the user invokes an existing HRIC (usually by calling the HRIC to invoke), the string returned from the previous application is forwarded to a switch element that routes the request and enables the called HRIC.
HRIC interfaces: these are connected to the switch element and are linked to the HRIC that performs specific actions. They can be removed or extended as soon as new HRICs are included in the design. When the called HRIC ends its execution, the control is returned back to the voice assistant interface.
To note that multiple different HRICs may be combined so that the robotic platform can be executed to run more than one actioncon currently. This may be done by either creating one HRIC which includes different existing HRICs or by the VAI if the robotic platform supports that.
3.2. Voice Assistant Component (VAC)
The VAC is a key component of our abstraction layer. It receives the audio from the user in streaming from the control HRIC and reacts in different ways. It is the responsibility of the VAC to detect the end of the text the user is expressing. The received audio is first processed through a speech-to-text engine. If the text matches the starting command of any of the applications loaded into the robot, then the control HRIC activates them. Otherwise, the voice assistant is enabled for the interaction with the user. In this way, the user can either play with any of the applications loaded into the robot or interact with the robot in the open domain to ask anything he/she desires. The VAC can employ any of the existing state-of-the-art voice assistants tools such as Google Assistant, Amazon Alexa, Apple Siri, Microsoft Cortana, Wit.Ai, and so on. In general, any voice assistant tool with the following requirements may be employed for the VAC:
It is possible to send the user’s audio by using the SDK of the adopted voice assistant tool to its related cloud server handling the APIs for voice recognition;
The answers to the user’s questions are returned in a text or audio format. If the former occurs, the robot voice (or text-to-speech tools if the robotic platform is not equipped with speakers) could be used to read the answer. If the latter, the audio is simply played;
Custom script commands can be used to extend the voice assistant tools (e.g., Google Assistant’s Custom Device Actions if Google Assistant is employed). This would allow triggering of other behaviors and not forwarding the request to the voice assistant tool.
3.3. Server Side Support Component (SSSC)
Following the rationale of cloud robotics, which is having robots benefiting from the power computation, storage, and communication resources of the modern data centers in the cloud, in our abstraction layer we have introduced the Server Side Support Component (SSSC). It consists of a cloud or servers that store the data and algorithms required for a particular task demanding high computational power or high storage capabilities. The HRICs can communicate with related algorithms stored within the SSSC through REST APIs. They can be called via HTTP requests by the HRICs directly running into the robot. Every SSSC should have an associated HRIC to exchange data. Moreover, each SSSC can run independently from each other and the other components. We can have as many SSSC as desired.
Therefore, all the HRICs that require machine learning approaches, big data computation, cognitive computing capabilities, and so on, will need a certain number of SSSCs for the heavy computation. In such a way, all the cutting-edge discoveries in fields such as Computer Vision, Artificial Intelligence, Big Data, Semantic Web, Natural Language can be employed for an effective HRI.
This model is flexible and scalable because:
The same SSSC can be used by different robotic platforms and different HRICs at the same time;
The HRICs, to interact with SSSCs, need to be connected to the Internet and perform HTTP requests, which are very simple and not CPU-consuming tasks. For this reason, it is possible to upload a large number of HRIC before ending the physical space of a given robotic platform;
An unlimited number of SSSCs can be uploaded in the cloud or on external servers.
3.4. Action Component (AC)
Actions extend the functionality of the VAC and are available for a large amount of state-of-the-art voice assistant tools. These actions allow developers to increase the effectiveness of the HRI by creating a personalized interaction for users, allowing things to be done with a conversational interface that ranges from a rapid command to turn lights on to a longer conversation, like playing a chess game. In more general terms, an action defines the behavior for a specific user intent and the corresponding fulfillment.
Unlike SSSCs, ACs do not need to have an associated HRIC (unless they need access to robot parts or sensors different than robot’s speakers and microphones), because actions reside in the voice assistant cloud and they can be triggered directly from the VAC by giving explicit commands to the voice assistant.
All the actions created for voice assistant tools can be used out-of-the-box with any robotic platform, allowing the robot to have an entire set of applications ready to use. This leads to (i) a very flexible design because actions can also be reused with any device connected to the assistant platform; (ii) further scalability as an undefined number of actions can be created and uploaded.
4. The Proposed Use Case
In this section, we propose a use case implementing the abstraction layer shown in
Section 3. As a robotic platform, we have chose NAO (
https://www.softbankrobotics.com/emea/en/nao/ (accessed on 30 June 2021)). To develop the HRIC we adopted the Choregraphe suite. Note that any robotic wheelchairs can be employed for different use cases. The VAI of the Control HRIC is a peculiar interface used to communicate with the voice assistant platform. It includes a thread that records the audio coming from the robot’s microphone using the command-line sound recorder for ALSA (
http://alsa-project.org/ (accessed on 30 June 2021)) drivers with the
arecord command. Its output is streamed to a middle-ware layer that performs buffering and sends the audio to the voice assistant platform. Through the middle-ware, the VAI receives and parses the response sent by the voice assistant platform. An example of a response may be the name of the application to run. The switch is a simple module that routes the VAI output and starts the desired application of the user.
ACs are built with Actions on Google (
https://developers.google.com/actions/ (accessed on 30 June 2021)) and were used to develop one application called
Mr. Chess, which allows a user to play chess with voice commands. Actions On Google work in collaboration with Dialogflow, a user-friendly tool that allows the use of machine learning to understand the natural language of users.
In our use case, we developed six applications. Four of them use a dedicated SSSC to perform heavy computations with an associated HRIC interface for handling the interaction with the user. The interfaces can communicate with SSSCs through REST APIs. One of them consists of an HRIC only without the support of SSSC. Another is entirely developed using the AC component.
4.1. The Developed Applications
The applications we included in our use case represent different combinations that can be developed on top. The first one, the Bingo game, is a simple HRIC without any SSSC or AC. Then, we present four modules with a similar scheme, consisting of HRIC and SSSC. Finally, we describe the Chess game we developed through the AC only.
4.1.1. Bingo Game
This application consists of a simple HRIC created to play Bingo with one or more persons. It works without any external SSSC. Thus the HRIC is responsible for everything: the interaction with humans and the game logic. Applications such as this might be very entertaining for the elderly. The Bingo Game starts as soon as the user says to the robot Hey NAO, let’s play Bingo now.
Bingo HRIC
When the application starts, NAO explains the rules of the Bingo game. It then waits for an acknowledgement from the user to start the game. Once started, the robot keeps extracting numbers until the user says a stop word, such as bingo, line, repeat or stop. If the user says bingo or line, the robot asks the user to say the extracted numbers (for the line or the bingo). After the user response, the robot double checks the numbers with the user and, if the user confirms, checks them among those previously extracted. In case of winning the robot performs an happy dance otherwise it performs a disappointing animation. In any moment of the game the user may say repeat to ask the robot to repeat the last extracted number, faster or slower to increase/decrease the speed of extraction and exit, to exit and close the application giving control back to the VAC.
4.1.2. Semantic Sentiment Analysis Application
The Semantic Sentiment Analysis Application allows NAO to understand the polarity of the user’s input sentence. The application consists of two parts: the HRIC and the SSSC. The HRIC, enabled by the VAC after the user’s expression
NAO, play sentiment analysis, handles the interaction between the robot and users: NAO waits for a natural language expression, which is then converted into text by a speech recognition module powered by Nuance (
https://www.nuance.com/ (accessed on 30 June 2021)) and the converted text is sent, via REST APIs, to the associated SSSC for the classification task. The SSSC includes the Semantic Sentiment Analysis engine [
39,
40,
41,
42,
43,
44,
45,
46], which employs a Deep Learning approach using Recurrent Neural Networks (further details on the used deep neural network, training, test data, and tasks can be found in [
47]). The SSSC, then, returns an output class,
positive,
neutral or
negative, and the robot performs a different animation based on that. NAO keeps waiting for input sentences to identify as positive, neutral or negative until the user says
exit to end the Semantic Sentiment Analysis application and returns the control to the VAC.
4.1.3. Generative Conversational Agent Application
The Generative Conversational Agent Application included in the use case is capable of holding an open-dialog conversation with the user. As a result, NAO is thus able to reply with coherent and sensible responses and according to the user’s precedent utterances.
Once the application is enabled by the VAC (when the user says
NAO, let’s talk), the robot waits for the user to talk. Similar to the previous application, this one consists of an HRIC which handles the interaction with the user, and an SSSC, where the server runs the generative conversational agent and provides REST APIs. After the speech-to-text, the input text is sent to the SSSC, which uses an embedding layer based on the Stanford GloVe word embedding project (
https://nlp.stanford.edu/projects/glove/ (accessed on 30 June 2021)) to generate an answer. Further details on the adopted generative conversational agent can be found here [
39].
4.1.4. Robot Action Commands Application
The Robot Action Commands Application allows NAO to execute multiple natural language action commands spoken by the user. Commands such as NAO, raise your left arm and sit down or NAO, walk forward raising your arm can be given through this application. This application exploits an ontology that is fed to a natural language processing engine that has been defined in this paper. The architecture of this application consists of an HRIC and a corresponding SSSC. As soon as the application is enabled by the VAC, the HRIC sends input commands of the user to the SSSC for processing.
The output of the SSSC is a recognized action to be sent back to the HRIC, which will instruct the robot to perform the related physical action. If the action is incomplete, the robot asks the user for the missing information. This occurs when a user misses some entity, for example in
NAO, please raise your arm. In such a case, the Natural Language Processing engine that has been developed within the SSSC knows that there might be two possible actions, related to the two arms of the robot. The HRIC then is informed of the two choices and interacts with the user asking to specify further. Moreover, the HRIC has two modes,
STATEFUL and
STATELESS. When the former is set, all the positions of the robot between different commands are maintained. When the latter is set, the robot goes back to its default position after it performs each requested action. Further details about the NLP engine, the ontology, and how they interact with each other to identify robot actions can be found in [
48].
4.1.5. Object Detection Application
The Object Detection Application is enabled by the VAC when the user says to the robot
NAO, execute object detection. The HRIC is therefore activated, and the robot informs the user. When he/she says
recognize, the robot will take a picture using its front camera. The photo will be sent to the associated SSSC, which contains the object detection server employing the TensorFlow Object Detection API (
https://github.com/tensorflow/models/tree/master/research/object_detection (accessed on 30 June 2021)) used to compute the bounding boxes and the related object categories with the associated confidence values. The SSSC can recognize 91 different types of objects, and for two particular object categories, dogs and cats, it can perform a fine-grained classification and recognize their breed.
After the HRIC sends the picture to the SSSC, it returns the output class of the recognized object to the HRIC. The HRIC then asks the user if that object is correct. If yes, the new annotation is saved together with the picture and will augment the training set. The model is periodically re-trained with the new data. Further details on how the object detection server works can be found in [
49].
4.1.6. Mr. Chess Application
Mr. Chess is a Google Assistant action conceived to play chess with a user. This application demonstrates how standalone AC applications fit into our architecture. NAO acts like middleware between the user and the Google Assistant action. For this reason, the HRIC is not responsible for managing the interaction with humans, and the audio recorded by NAO’s microphone is sent to Google Assistant, where it is elaborated and converted into text. The correct intent is found by the Dialogflow Agent, which recognizes a specified pattern.
The Chess Application is composed of two elements: a Dialogflow Agent and REST APIs.
Dialogflow Agent
The Dialogflow Agent consists of two main components: intents and entities. They both manage and route user’s requests. Intents are used to map users’ input to responses, whereas entities are used to extract and understand useful data from intents inputs. The Mr. Chess application consists of three main intents:
Default Welcome Intent is the default intent of the dialog. It starts when the user begins the conversation, and it first explains the rules of the game. At the first run, it asks for confirmation to extract the user’s name from the Google account used in the callback function triggered by the intent. If it is a replay, the robot greets the user. Next, the intent checks if there is a pending active game, and the user is asked if either he/she wants to re-join it or if he/she wants to create a new one.
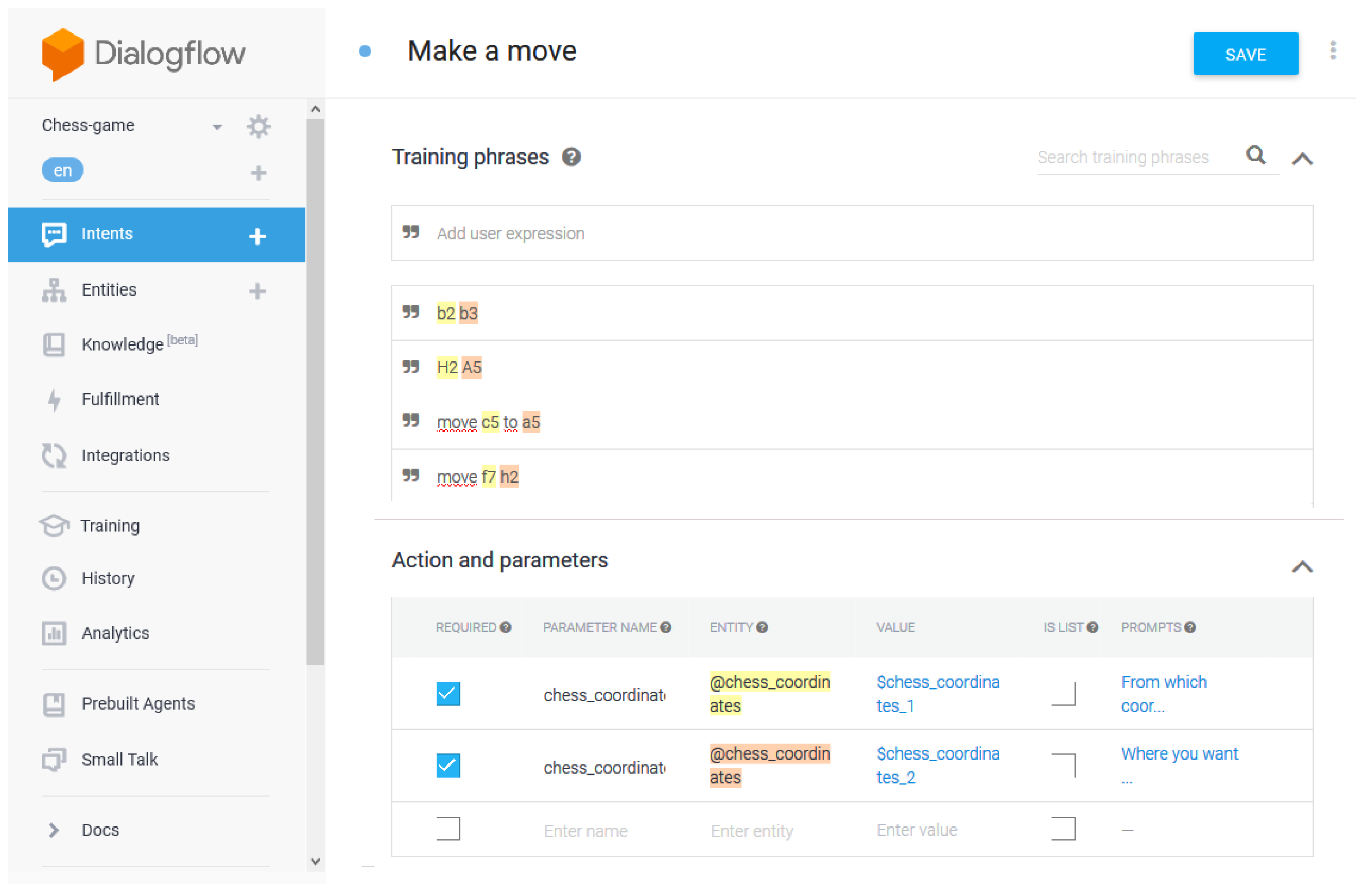
Make a Move manages most of the interaction between the action and the user. It is capable of understanding all the possible chess moves, which will be sent to the Chess REST APIs through an HTTP call. According to the answer of the REST APIs, the action will answer accordingly. If, for example, the move is invalid, the user will be informed. The game continues until either a stalemate or a checkmate occurs. The
Make a Move intent can be seen in
Figure 2;
See Board is a helper whose purpose is to print the updated chessboard when the user wants. Note that this function works when the used robotic platform has a device to show output. As such, it does not work in our test-case.
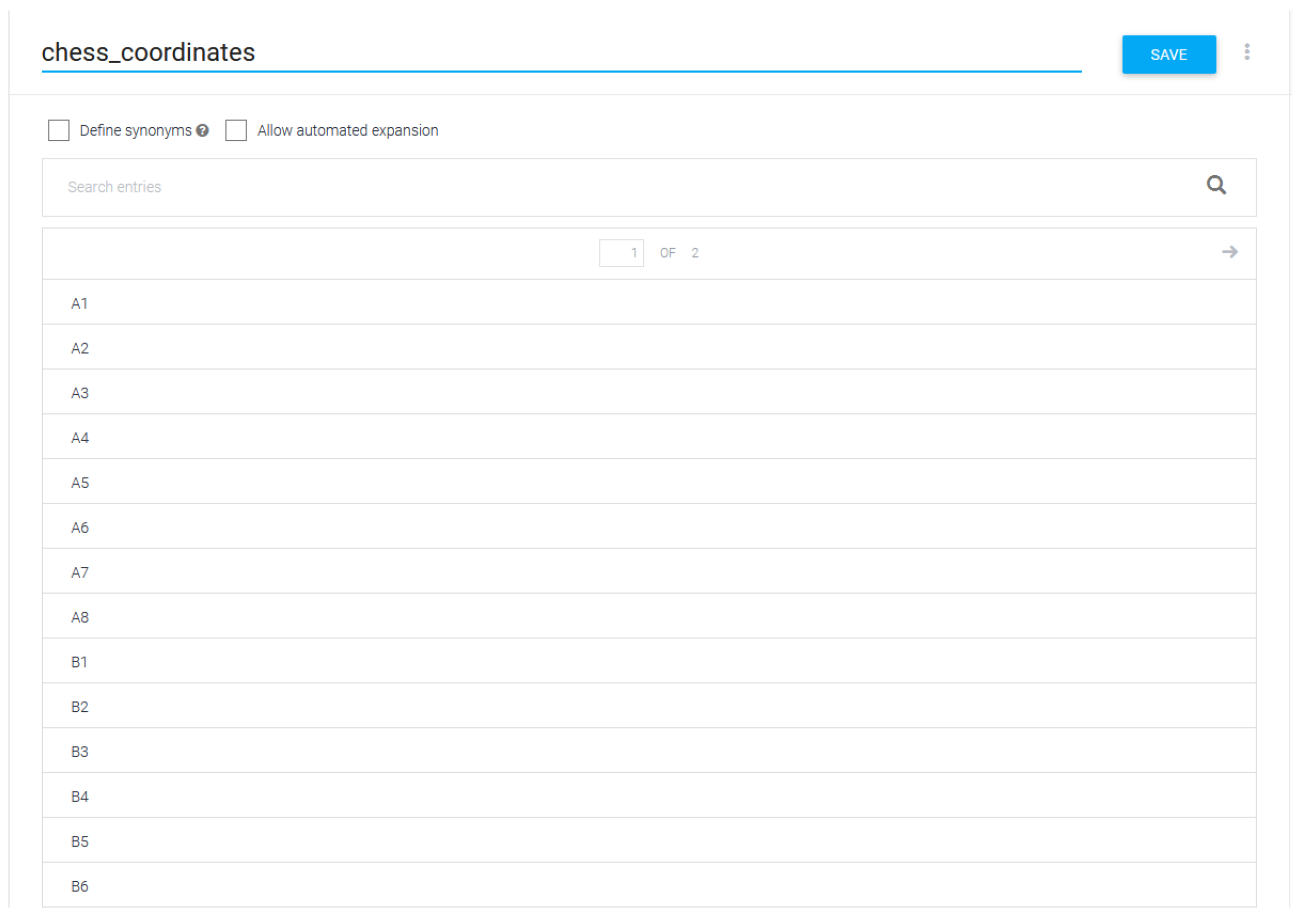
A new entity type, named
chess_coordinates, was created. It specifies all the possible chess moves that can be found in users’ utterances. An example of its definition is shown in
Figure 3.
Chess REST API
The chess REST API is built on top of Chess.js (
https://github.com/jhlywa/chess.js (accessed on 30 June 2021)) and ChessCorp Artificial Intelligence: Kong (
https://www.npmjs.com/package/chess-ai-kong (accessed on 30 June 2021)). Chess.js is a Javascript library used for chess move verification and validation, for the identification of specific situations (e.g., stalemate, check and checkmate) and chess piece placement. The latter is an artificially intelligent algorithm search engine, based on Alpha Beta Pruning (
https://en.wikipedia.org/wiki/Alpha%E2%80%93beta_pruning (accessed on 30 June 2021)). The Chess API is written in NodeJS using the Express framework (
https://expressjs.com/ (accessed on 30 June 2021)). For every user command (new game, load game, move, etc.), an HTTP call is available. The states of games is stored in a NoSQL database, MongoDB, hosted in the cloud server MongoDB Atlas. The code of the Chess Application is freely accessible (
https://github.com/conema/chess-api (accessed on 30 June 2021)).
5. Use Case Evaluation
In this section, we will perform the architecture and the user experience assessment of the proposed use case.
5.1. Use Case Architecture Evaluation
We initially developed our use case on a MacOS with 8GB RAM and 2,2 GHz Dual-Core Intel Core i7 using Choregraphe 2.1.4 and connected to a hot-spot. Within the same hot-spot, the NAO robot was also connected. Two Amazon EC2 instances were employed to host the SSSCs components. Python was the adopted programming language (for HRICs). Javascript, Python, and Java were adopted for the presented SSSCs. Google Assistant SDK was the voice assistant we employed.
The software architecture of a program or computing system is the structure or structures of the system, which comprise software components, the externally visible properties of those components, and the relationships among them [
50].
Three different methods for software architecture evaluations have been developed at the Software Engineering Institute: ATAM (Architecture Tradeoff Analysis Method) [
51], SAAM (Software Architecture Analysis Method) [
52], and ARID (Active Reviews for Intermediate Designs) [
53]. All the others derive from them [
54].
Because our use case is at an early development stage we chose SAAM for its evaluation. SAAM appeared in 1994 intending to analyze system qualities early in the life cycle of the software architecture. This allows the developers different architectural options. Some pros that SAAM provides are: (i) potential problems can be identified in the early phase of the development; (ii) the documentation can be improved; (iii) the understanding related to software architecture problems can be enhanced; (iv) it relates different involved stakeholders (architect, maintainer, developer, end-user); (v) through the identification of scenarios it provides feedback for its improvement.
SAAM focuses on modifiability in its various forms (such as portability, subsetability, and variability) and functionality.
Modifiability allows changes to be made to a system quickly and cost-effectively.
Portability is the ability of the system to run under different computing environments.
Subsetability is the ability to support the production of a subset of the system or incremental development.
Variability represents how well the architecture can be expanded or modified to produce new architectures that differ in specific ways.
Functionality is the ability of the system to do the work for which it was intended.
The steps of SAAM that we performed within our analysis are the following:
Identify stakeholders;
Develop, prioritize and classify scenarios;
Perform scenario evaluation;
Reveal scenario interactions;
Generate overall evaluation.
5.1.1. Identify Stakeholders
Four different types of stakeholders revolve around the proposed use case: end-users, developers, testers, and maintainers. End-users play with the robotic platform we provided. Developers are more interested in the clarity, completeness of the use case architecture and clear interaction mechanisms and will develop on top of it. Testers check error-handling consistency, cohesion, and conceptual integrity. Maintainers keep the platform healthy and locate places of change. Two end-users, two developers, one tester, and one maintainer were selected among master students (end users), senior software engineers working within the university for a spin-off (developers, testers, and maintainers).
5.1.2. Identifying and Classifying Scenarios
Scenarios representing future directions that the system must support were identified. They can be either direct or indirect. Whereas direct scenarios can be executed by the system without any modification, indirect scenarios require edits. In the following, we list each of them.
A maintainer with the task of installing the entire use case using a different OS (Windows) than the one (MacOS) used for initial development (DIRECT);
A user interacting with the robot using each of the presented modules (DIRECT);
A tester that performs all the needed debugging of the use case installed software modules (DIRECT);
A developer willing to integrate into the current use case a new module consisting of an HRIC and a SSSC (INDIRECT);
A developer willing to integrate into the current use case a new AC (INDIRECT).
5.1.3. Scenarios Evaluation and Interactions
The maintainer was involved in Scenario 1. She used a PC with Windows, an OS different than that used for development. She went through the documentation and was able to install all the required software. After making sure the installation was successful and everything worked properly, she handed over everything to one end-user for deeper testing (as indicated in Scenario 2).
Two end-users were employed for scenario 2. They tested each of the presented modules following the related user documentation. They interacted with the robot using the employed Google Assistant technologies. They both separately spent 2 h each playing with the system. One used the use case with the current settings (i.e., MacOS as OS). The other one used the use case configured by the maintainer as indicated in Scenario 1. They raised a few concerns: on the one hand, each module was correctly triggered by the user. On the other hand, some of the modules returned an unexpected output showing some accuracy problems with the internal function of the module but not with the use case itself. In particular, most of the problems were with the Conversational Agent module that often returned statements too far from the user input statement and the speech-to-text performed by the virtual assistant tool. Besides the accuracy problems of the module (which can be improved with updates on just the module), the two users were satisfied with the overall interaction and usage of the system.
A tester was employed for Scenario 3. He set the debug mode through a field in the configuration file to generate the output of each module. He activated each of the presented modules and looked at their output (in form of logs). The tester did not find any software issue, bugs, or weakness in the system and the communication of the involved components.
Scenarios 4 and 5 were carried out by the two developers. One developed the HRIC and SSSC of an Odd or Even game, whereas the other developed the same game as an AC. They went through the developer guide and the source code identifying the needed components to interact with, their connections, and which interfaces to add. Hence they developed their games. They both had to edit the VAC and the HRI Interface that allowed them to activate the first game by saying the word Odd or Even and the other version with the word Odd or Even AC Game. When one version of this game was activated, the following interactions of the user affected the modules related to the underlying game version only. As soon as the game was over, the control went back to the main voice assistant interface. The two developers were able to perform those changes and easily install the two modules. Their feedback was related to some improvement (more clear statements related to some technical aspects) in the documentation that would improve the comprehension. The steps followed by the two developers to implement two new modules were added to the developer guide as Hello World examples.
5.1.4. Overall evaluation
Both the two last scenarios affected the VAC and the HRI Interface. On the one hand, in the developed use case the VAC corresponds to the Google Assistant SDK that effectively handles multiple requests. On the other hand, both modules had to access and edit the HRI Interface to include the hooks for the two games. This turned out to be one weakness of the use case given the low modularity of this component. From the developer’s point of view, it would have been better to use a mechanism of registration where each developed module can be exploited independently. This was invaluable feedback and, as such, we are already working to provide such a mechanism in the next version of our use case. Furthermore, the interaction among different stakeholders was definitely a benefit for the resulting version of the documentation and architecture as it helped us to see different sides of the same concept at a different level. Low coupling and high cohesion were two features observed by the developers involved in the last two scenarios.
5.2. User Experience
The functionalities of the robot were demoed for 30 min to 10 participants chosen among students and researchers on different topics of the University of Cagliari (6 males and 4 females). The average of their age was 31.2 with a standard deviation of 3.37. We asked them to perform the following tasks with the robot and for the following amount of time: sentiment analysis (3 min), conversation with the robot (5 min), ask the robot to perform some actions (4 min), ask the robot to identify some objects (3 min), play Bingo (5 min) and chess (5 min). Each user filled a survey: the first part included seven open questions (the first five also included five levels of reply,
very bad, bad, normal, good, very good), whereas the second part was a standard System Usability Scale (SUS) (
https://www.usability.gov/how-to-and-tools/methods/system-usability-scale.html (accessed on 30 June 2021)) questionnaire aimed to evaluate the application’s usability. In the following, we summarize their answers to the open questions.
Q1. How do you find the interaction with the robot? Six users gave a good score and four very good.
Q2. How effectively did the robot classify positive and negative sentences? Five users gave a score of (very good), whereas five more gave normal, as they found some errors in the ability to recognize the correct sentiment.
Q3. How effectively did the robot perform the action commands you gave? Seven users gave (good) mentioning that the robot was able to perform the action from a list. Three users gave normal complaining about the robot that was it not always able to recognize their commands. It was easy to fix this problem because users employed peculiar words not covered within the dictionary. The solution was to update the dictionary with the new words.
Q4. How effectively did the robot identify objects? Eight users gave good as the robot correctly identified the object they showed. Two users gave normal because they used the application at an incorrect distance from the robot. We fixed this by letting the robot say, when the object detection module was triggered, to maintain a certain distance from it.
Q5. How effective was the robot in playing Bingo or chess? All users gave good as the robot played both the games smoothly and the users had fun playing with it.
Q6. What are the main weaknesses of the resulting interaction? The only complaint was pointed out by two users mentioning that tiredness of the user might appear when used extensively.
Q7. Can you think of any additional features to be included in the robot interaction? The suggested features were: (1) to have the robot say instructions better when it was turned on and each time a certain module was triggered; (2) the ability to save all the data pertaining to the interaction with the user.
The SUS questionnaire confirmed the good opinion of the users, scoring 83.2/100, equivalent to an A grade, and placed our use case in the 93% percentile rank (percentiles of SUS
https://measuringu.com/interpret-sus-score/ (accessed on 30 June 2021)). All users felt very confident in playing with the proposed use case (with an average score of 4.1 ± 0.4) and thought that it was easy to use (4.3 ± 0.3). In addition, they were happy to use it frequently (4.2 ± 0.2) and did not think that it was complex (1.2 ± 0.3) or that they would need the help of a technical person to use it in the future (1.5 ± 0.7).
Considering the first part of the survey, questions Q2, Q3, Q4, Q5 are not specific for the adopted robotic platform and the related responses are general for any robotic platform using the proposed abstraction layer. The underlying applications rely on voice assistant technologies only and, therefore, are not affected by the employed robotic platform. A robotic wheelchair using voice assistant technology would obtain the same values for Q2, Q3, Q4, Q5. Q1 (and partially Q6 and Q7, corresponding, respectively, to the potential weaknesses of the resulting system and the capabilities that can be added for a better interaction) are two questions which are affected by the used robotic platform and may vary if a robotic wheelchair is used.
6. Conclusions and Future Works
In this paper, we introduced an abstraction layer for HRI that includes voice assistant technologies and that can be plugged into any robotic platform. Among its advantages, it allows reduction in the workload on the robot by using external tools and cloud platforms for running resource-intensive tasks. It also allows the development of applications of different kinds that can augment the interaction between the robot and the user. Moreover, the employment of voice assistant technologies is leveraged for the management of some applications built on top and for the conversation between the robotic platform and the user in the open domain. The scheme provided by the abstraction layer can be instantiated by choosing the robotic platform and technology for each component. One example of such instances is represented by the use case we proposed which uses the NAO robotic platform, the Choregraphe suite, and Google Assistant as voice assistant technology. Moreover, we employed the Google Assistant SDK and the associated developing tools. One example application leveraging Google Assistant and its SDK was developed and included in our proposed use case. Similarly, in our proposed use case, we employed Google’s voice services. Furthermore, we evaluated the proposed use case testing possible scenarios with several stakeholders who identified potential weaknesses that we are taking into account for the next release of our architecture. For simplicity, we also evaluated the user experience of the proposed use case through questionnaires we gave to 10 different users. The entire source code for the use case we developed can be freely downloaded (
https://github.com/conema/ZAGA (accessed on 30 June 2021)). The presented abstraction layer is general; therefore, if the intention is to use services with more privacy-aware policies, different use cases based on our proposed abstraction layer can be instantiated by adopting solutions such as Snips.ai. A video related to the proposed use case that summarizes the different applications we built on top of NAO is freely available here (
https://www.youtube.com/watch?v=tCEIrj6dg_w&feature=youtu.be (accessed on 30 June 2021)). The reader should note that the proposed use case can be applied to any robotic platform including robotic wheelchairs. For the Object Detection Application, the robotic wheelchair must be provided with a camera, whereas for the Mr. Chess Application it should have a screen. Finally, the Robot Action Command should be reset according to the physical movements and positions the robot can assume.
There are several directions that we would like to head in parallel. One of them, the most challenging, and at architecture-level, is related to the development of a smart engine so that each application built on top can be triggered automatically depending on certain events to enrich the HRI between the user with the voice assistant technology by employing certain behavior (e.g., sentiment analysis, object detection) and have the robotic platform performing related actions depending on its sensors, body parts, etc. The idea is to turn any robotic platform closer towards the behavior of a human. One more direction at the use case level is related to the development of a further use case employing ROS (
https://www.ros.org/ (accessed on 30 June 2021)), already widespread among a certain number of robotic platforms.




{kind=link}
{kind=link}
{kind=link}