
Applicability and Analysis of the Results of Non-Contact Methods in Determining the Vertical Displacements of Timber Beams





Abstract
:1. Introduction
The Purpose of the Research
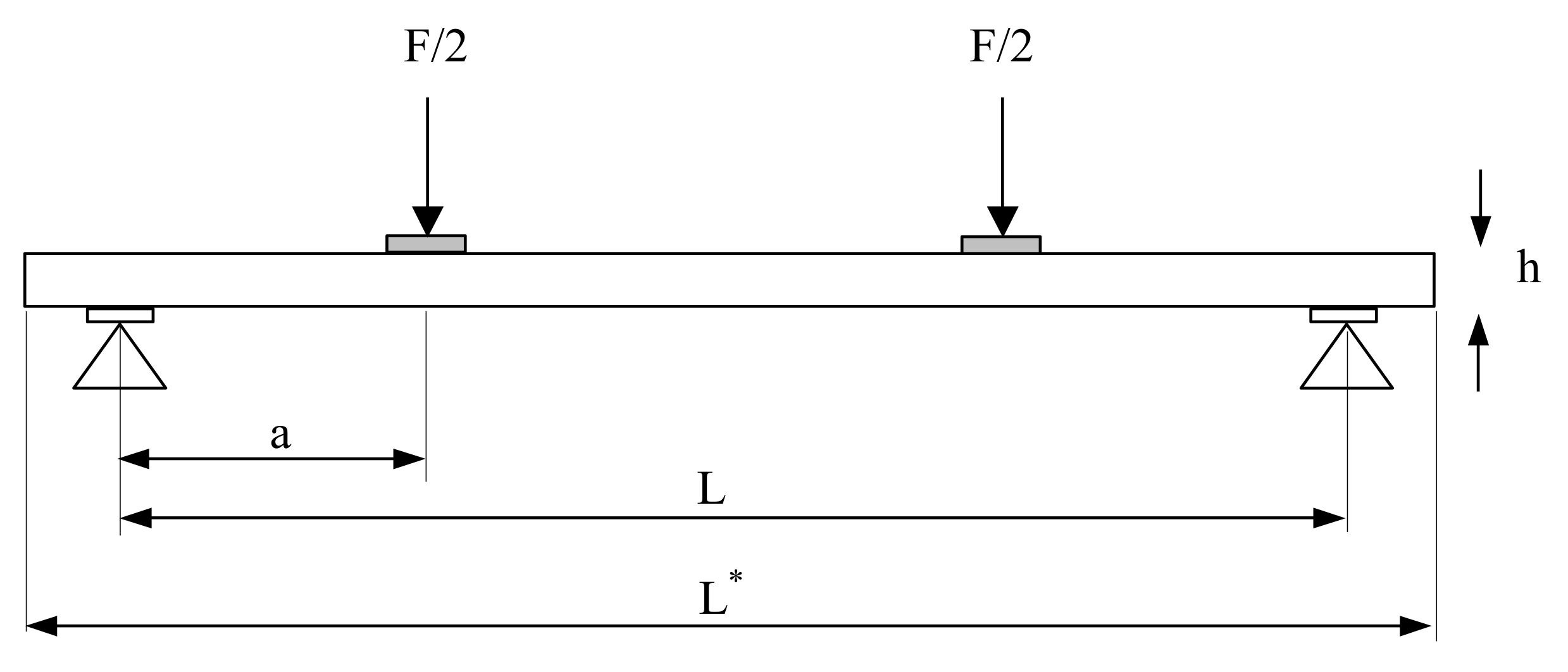
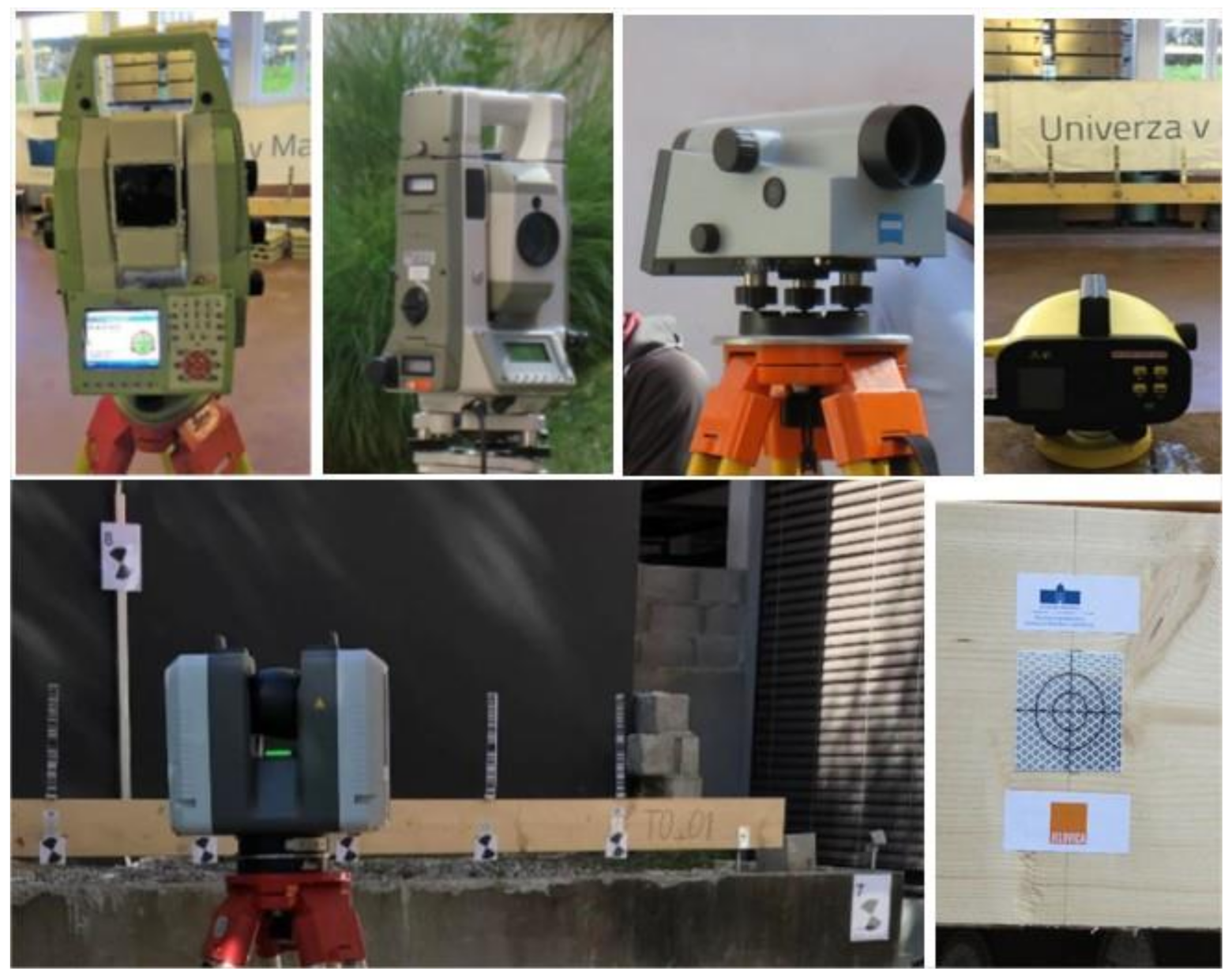
2. Materials and Methods
- In the laboratory, the measurements were performed under the conditions of 1 October 2020. The air temperature was 21.2 °C, the relative humidity 51%.
- Outdoor measurements were performed on 5 October 2020 under meteorological conditions outside the laboratory. The air temperature was 16.5 °C, the relative humidity 70%.
3. Results
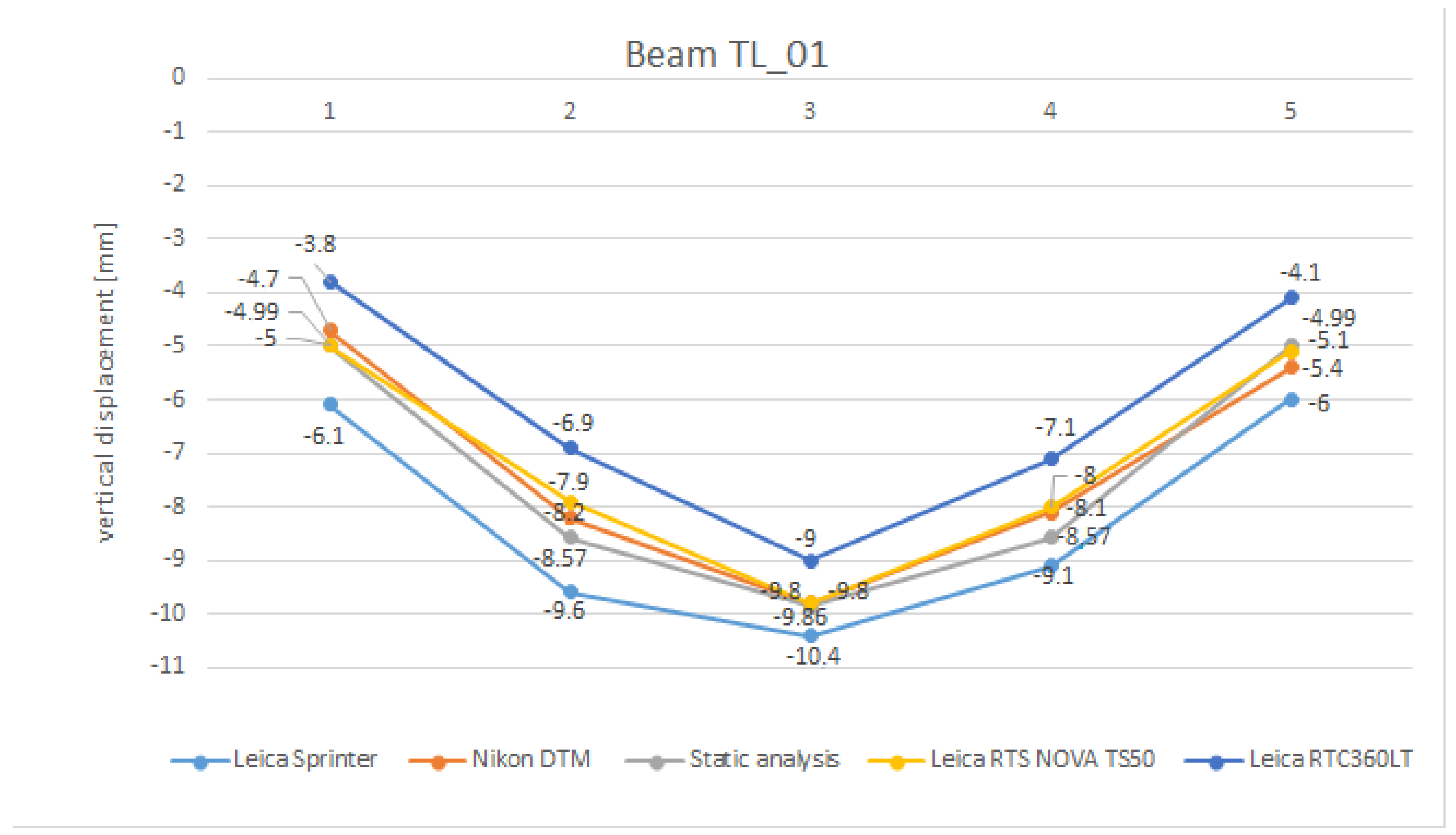
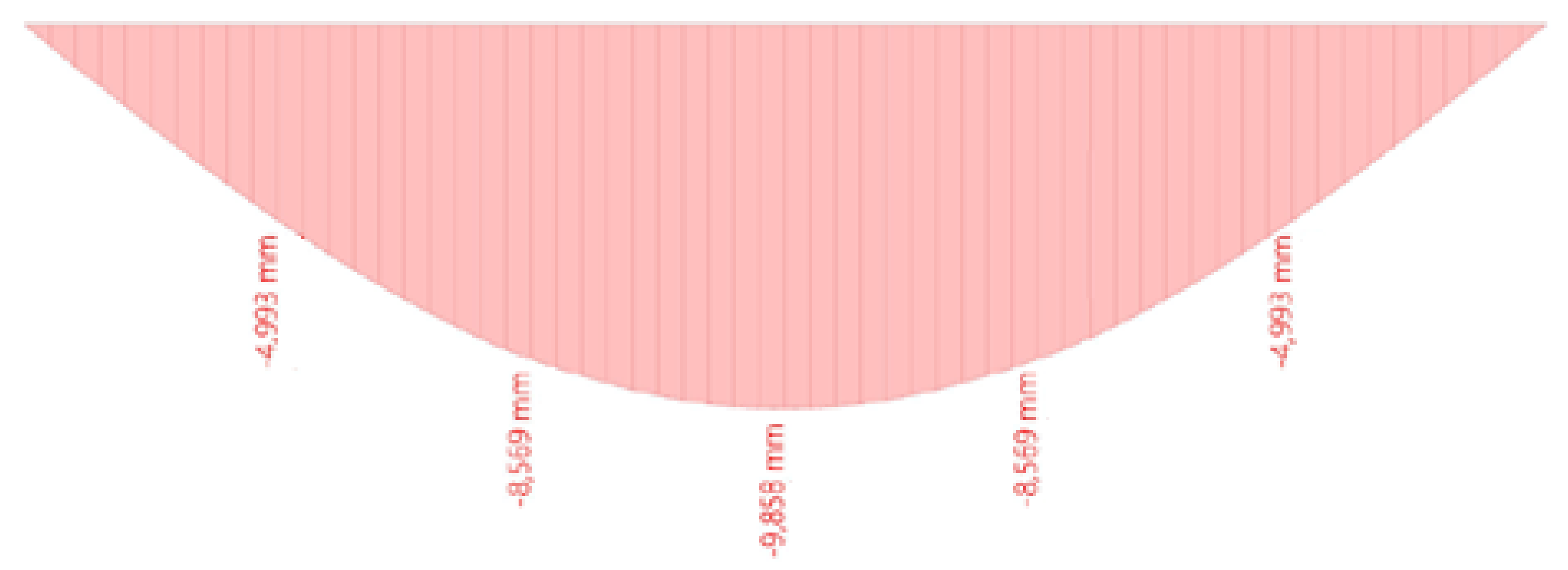
3.1. Timber Beam TL_01
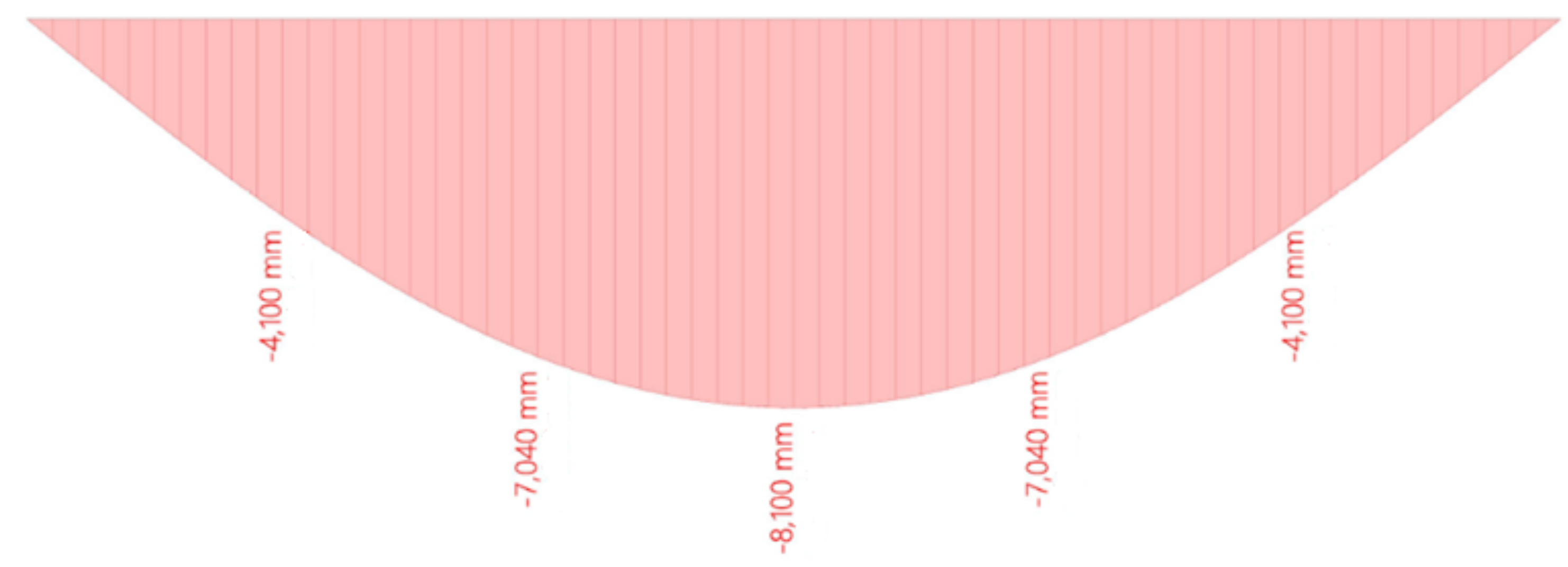
3.2. Timber Beam TO_01
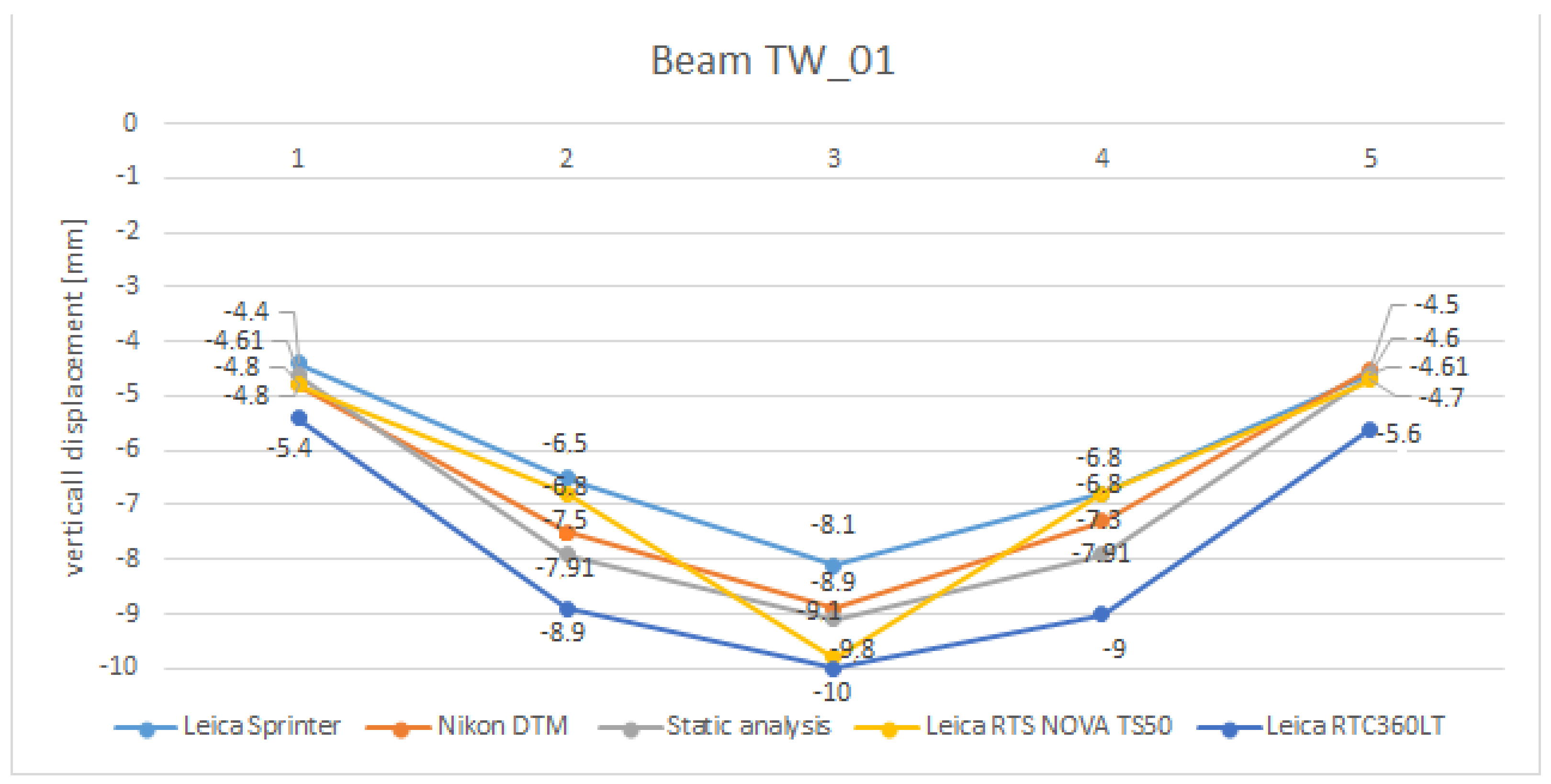
3.3. Timber Beam TW_01
4. Discussion
- Measurements made with the Leica RTC 360 LT terrestrial laser scanner were found to be less accurate than measurements made with the Leica Nova TS 50. The difference between the calculated value and the measured value of the vertical displacement was on average 0.2 mm for the measurements with the Leica Nova TS 50, while this difference was 0.9 mm for the measurements with the RTC 360 LT.
- A larger deviation of the vertical displacement measurements occurred with targets that were not automatically detected by the program and were therefore recorded manually.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kovačič, B.; Motoh, T. Determination of static and dynamic response of structures with geodetic methods in loading tests. Acta Geod. Geophys. 2019, 54, 243–261. [Google Scholar] [CrossRef]
- Kovačič, B.; Gubeljak, N.; Lubej, S. Experimental investigation of the effect of temperature on the structures in the measurement of displacements. Tech. Gaz. 2019, 26, 1010–1016. [Google Scholar]
- Kovačič, B.; Kapović, Z. Precision and results reliability analysis of different instruments for investigating vertical micro-displacement of structures. Surv. Rev. 2005, 38, 190–203. [Google Scholar] [CrossRef]
- Kovačič, B.; Muršec, L.; Lubej, S. Non-contact monitoring for assessing potential bridge damages, Topical Problems of Green Architecture. In Proceedings of the Civil and Environmental Engineering 2019 (TPACEE 2019), Moscow, Russia, 19–22 November 2019. [Google Scholar]
- Kovačič, B.; Motoh, T.; Lubej, S. Experimental analysis of the dynamic responses of bridging objects with alternative non-contact method. In Proceedings of the E3S Web of Conferences, International Science Conference SPbWOSCE-2018 Business Technologies for Sustainable Urban Development, St. Petersburg, Russia, 10–12 December 2018. [Google Scholar]
- European Committee for Standardization. EN 408:2010+A1:2012. Timber Structures—Structural Timber and Glued Laminated Timber—Determination of some Physical and Mechanical Properties. Available online: https://standards.iteh.ai/catalog/standards/cen/5adc63d2-e164-4b6e-9c2d-64dd8a9d6f19/en-408-2010 (accessed on 11 August 2010).
- Ebrahim, M. 3D Laser Scanners: History, Applications, and Future; Faculty of Engineering, Assiut University: Assiut, Egypt, 2014. [Google Scholar]
- Yakar, M.; Yilmaz, H.M.; Mutluoglu, O. Comparative Evaluation of Excavation Volume by TLS and Total Topographic Station Based Methods. Lasers Eng. 2010, 19, 331–345. [Google Scholar]
- Yang, H.; Omidalizarandi, M.; Xu, X.; Neumann, I. Terrestrial Laser Scanning Technology for Deformation Monitoring and Surface Modelling of Arch Structures. Compos. Struct. 2016, 17, 173–179. [Google Scholar]
- Vezočnik, R. Analiza Tehnologije Terestričnega Laserskega Skeniranja za Spremljanje Deformacij na Objektih. Ph.D. Thesis, University of Ljubljana, Ljubljana, Slovenija, 2011. [Google Scholar]
- Truong-Hong, L.; Laefer, D.F. Application of terrestrial laser scanner in bridge inspection: Review and an opportunity. In Proceedings of the IABSE Symposium Report, Madrid, Spain, 3–5 September 2014; Volume 102. [Google Scholar]
- González-Aguilera, D.; Gómez-Lahoz, J.; Sánchez, J. A New Approach for Structural Monitoring of Large Dams with a Three-Dimensional Laser Scanner. Sensors 2008, 8, 5866–5883. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Wan, Y.; Gao, X. A new approach for subway tunnel deformation monitoring: High-resolution terrestrial laser scanning. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 223–228. [Google Scholar]
- Xu, X.; Bureick, J.; Yang, H.; Neumann, I. TLS-based composite structure deformation analysis validated with laser tracker. Compos. Struct. 2018, 202, 60–65. [Google Scholar] [CrossRef]
- Lovas, T.; Barsi, A.; Detrekoi, A.; Dunai, L.; Csak, Z.; Polgar, A.; Bereyi, A.; Kibedy, Z.; Szocs, K. Terrestrial Laserscanning in Deformation Measurements of Structures; International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Part 5 Commission V Symposium: Newcastle upon Tyne, UK, 2010; Volume XXXVIII. [Google Scholar]
- Yang, H.; Xu, X.; Neumann, I. Deformation Behavior Analysis of Composite Structures under Monotonic Loads based on terrestrial laser scanning technology. Compos. Struct. 2018, 183, 594–599. [Google Scholar] [CrossRef]
- Gordon, S.; Lichti, D.D. Modeling Terrestrial Laser Scanner Data for Precise Structural Deformation Measurement. J. Surv. Eng. 2007, 133, 2. [Google Scholar] [CrossRef]
- Lienhard, W.; Ehrhart, M.; Grick, M. High frequent total station measurements for the monitoring of bridge vibrations. In Proceedings of the 3rd Joint International Symposium of Deformation Monitoring (JISDM), Vienna, Austria, 30 March–1 April 2016. [Google Scholar]
- Leinhard, W.; Ehrhart, M. State of the art of geodetic bridge monitoring. In Proceedings of the International Workshop of Structural Health Monitoring (IWSHM), Stanford, CA, USA, 1–3 September 2015. [Google Scholar]
- Celebi, M.; Sanli, A. GPS is Pioneering Dynamic Monitoring of Long-Period Structures. Earthq. Spectra 2002, 18, 47–61. [Google Scholar] [CrossRef]
- Chen, Q.; Huang, D.F.; Ding, X.L.; Xu, Y.L.; Ko, J.L. Measurement of vibrations of tall buildings with GPS. In Proceedings of the Health Monitoring and Management of Civil Infrastructure Systems, Newport Beach, WA, USA, 4–8 March 2001; Volume 4337, pp. 477–483. [Google Scholar]
- Roberts, G.W.; Meng, X.; Dodson, A.H. The use of kinematic GPS and triaxial accelerometers to monitor the deflections of large bridges. In Proceedings of the 10th FIG International Symposium on Deformation Measurement, Orange, CA, USA, 19–22 March 2001. [Google Scholar]
- Ogaja, C.; Wang, J.; Rizos, C. Detection of Wind-induced Response by Wavelet Transformed GPS Solutions. J. Surv. Eng. 2003, 129, 99–104. [Google Scholar] [CrossRef]
- Meng, X.; Dodson, A.H.; Roberts, G.W. Detecting Bridge Dynamic with GPS and Triaxial Accelerometers. Eng. Struct. 2007, 29, 3178–3184. [Google Scholar] [CrossRef]
- Marendić, A.; Kapović, Z.; Paar, R. Possibilities of Surveying Instruments in Determination of Structures Dynamic Displacements. Geod. List. 2013, 3, 175–190. [Google Scholar]
- Koo, K.Y.; Brownjohn, J.M.W. Structural health monitoring of the Tamar suspension bridge. Struct. Control. Health Monit. 2013, 20, 609–625. [Google Scholar] [CrossRef] [Green Version]
- Psimoulious, S.; Stiros, S. Measuring deflections of a Short-span Railway Bridges Using Robotic Total Sation. J. Bridge Eng. 2013, 18, 182–185. [Google Scholar] [CrossRef]
- Marendić, A.; Paar, R.; Grgac, I.; Damjanović, D. Monitoring of oscillations and frequency analysis of the railway bridge “sava” using robotic total station. In Proceedings of the 2nd Joint International Symposium on Deformation Monitoring (JISDM), Vienna, Austria, 6 March 2016. [Google Scholar]
- Marendić, A.; Paar, R.; Duvnjak, I.; Buterin, A. Determination of dynamic displacements of the roof of spots hall arena zagreb, FIG. In Proceedings of the 6th International Conference on Engineering Surveying, Prague, Czech Republic, 3–4 April 2014. [Google Scholar]
- Psimoulious, P.; Stiros, S. Measurement of Deflections and Oscillation Frequencies of Engineering Structures Using Robotic Theodolites (TS). Eng. Struct. 2007, 29, 3312–3324. [Google Scholar] [CrossRef]
- Kopačik, A.; Kyronovič, P.; Kadlecikova, V. Laboratory tests of robotic stations. In Proceedings of the FIG Working Week, Cairo, Egypt, 16–21 April 2005. [Google Scholar]
- Plekidis, V.; Tsakiri, M.; Makra, K.; Karakostas, C.; Klimis, N.; Sous, I. Evaluation of Dynamic Response and Local Soil Effects of the Evripos Cable-stayed Bridge Using Multi-Sensor Monitoring System. Eng. Geol. 2005, 179, 7–17. [Google Scholar]
- Christian, T. Model-based Analysis and Evaluation of Point Sets from Optical 3D Laser Scanners. Ph.D. Thesis, Otto-von-Guericke University Magdeburg, Magdeburg, Germany, 2007. [Google Scholar]
- Clark, J.; Robson, S. Accuracy of Measurements Made with A Cyrax 2500 Laser Scanner against Surfaces of Known Colors. In Proceedings of the XXth ISPRS Congress, Commission 4, Istanbul, Turkey, 12–23 July 2004. [Google Scholar]
- Luebke, D.; Lutz, C.; Wang, R.; Woolley, C. Scanning Monticello; The Department of Computer Science, School of Engineering and Applied Science, University of Virginia: Charlottesville, VA, USA, 2002. [Google Scholar]
- Comis, D. ARS Study Helps Farmers Make Best Use of Fertilizers, United States Department of Agriculture, Agricultural Research Service (ARS). Available online: https://www.ars.usda.gov/news-events/news/research-news/2010/ars-study-helps-farmers-make-best-use-of-fertilizers/ (accessed on 9 June 2010).
- Blais, F.; Picard, M.; Godin, G. Accurate 3D acquisition of freely moving objects. In Proceedings of the 2nd International Symposium on 3D Data Processing, Visualization, and Transmission, 3DPVT, Thessaloniki, Greece, 6–9 September 2004; pp. 422–429. [Google Scholar]
- Guidi, G.; Micoli, L.; Russo, M.; Frischer, B.; De Simone, M.; Spinetti, A.; Carosso, L. 3D digitization of a large model of imperial Rome. In Proceedings of the 5th International Conference on 3-D Digital Imaging and Modeling: 3DIM, Ottawa, ON, Canada, 13–15 June 2005. [Google Scholar]
- Hansen, H.N.; Carneiro, K.; Haitjema, H.; De Chiffre, L. Dimensional Micro and Nano Metrology. CIRP Ann. 2006, 55, 721–743. [Google Scholar] [CrossRef]
- Ingensand, H.; Ryf, A.; Schulz, T. Performances and experiences in terrestrial laser scanning. In Proceedings of the Optical 3-D Measurement Techniques VI, Athens, Greece, 22–27 May 2004. [Google Scholar]
- Gruen, A.; Kahmen, H. (Eds.) Ground-Base Remote Sensing Observations and Systems for Monitoring Volcanic Clouds. In Proceedings of the International Volcanic Ash Task Force (IVATF), Second Meeting, International Civil Aviation Organization, Montreal, QC, Canada, 11–15 July 2011. [Google Scholar]
- Kersten, T.; Sternberg, H.; Mechelke, K. Investigations into the accuracy behaviour of the terrestrial laser scanning system trimble GS100. In Proceedings of the Optical 3D Measurement Techniques VII, Vienna, Austria, 3–5 October 2005; pp. 122–131. [Google Scholar]
- Mechelke, K.; Kersten, T.P.; Lindstaedt, M. Comparative investigations into the accuracy behaviour of the new generation of terrestrial laser scanning systems. In Proceedings of the Optical 3-DMeasurement Techniques VIII, Zurich, Switzerland, 9–12 July 2007; pp. 319–327. [Google Scholar]
- Bauza, M.B.; Hocken, R.J.; Smith, S.T.; Woody, S.C. The development of a virtual probetip with application to high aspect ratio microscale features. Rev. Sci. Instrum. 2005, 76, 095112. [Google Scholar] [CrossRef]
- Dorn, M. Landmark detection by a rotary laser scanner for autonomous robot navigation in sewer pipes. In Proceedings of the ICMIT, the second International Conference on Mechatronics and Information Technology, Jecheon, Korea, 4–6 December 2003; pp. 600–604. [Google Scholar]
- Medina, A.; Gayá, F.; Pozo, F. Compact Laser Radar and Three-Dimensional Camera. J. Opt. Soc. Am. A 2006, 23, 800–805. [Google Scholar] [CrossRef] [PubMed]
- Torben, M.; Hansen, M.; Hjorth, K. Lidar Wind Speed Measurements from a Rotating Spinner; Danish Research Database & Danish Technical University: Lyngby, Denmark, 2010. [Google Scholar]
- Scopigno, R.; Bracci, S.; Franca, F.; Matteini, M. Exploring David. Diagnostic Tests and State of Conservation, 1st ed.; Giunti: Firenze, Italy, 2004; ISBN 88-09-03325-6. [Google Scholar]
- Zhang, S.; Huang, P. High-resolution, real-time 3-D shape measurement. Opt. Eng. 2006, 45, 123601. [Google Scholar]
- Larsson, S.; Kjellander, J.A.P. Motion control and data capturing for laser scanning with an industrial robot. Robot. Auton. Syst. 2006, 54, 453–460. [Google Scholar] [CrossRef]
- Na, K.-M.; Lee, K.; Shin, S.-K.; Kim, H. Detecting Deformation on Pantograph Contact Strip of Railway Vehicle on Image Processing and Deep Learning. Appl. Sci. 2020, 10, 8509. [Google Scholar] [CrossRef]
- Yrttimaa, T.; Luoma, V.; Saarinen, N.; Kankare, V.; Junttila, S.; Holopainen, M.; Hyyppä, J.; Vastaranta, M. Structural Changes in Boreal Forests Can Be Quantified Using Terrestrial Laser Scanning. Remote Sens. 2020, 12, 2672. [Google Scholar] [CrossRef]
- Szostak, M. Automated Land Cover Change Detection and Forest Succession Monitoring Using LiDAR Point Clouds and GIS Analyses. Geosciences 2020, 10, 321. [Google Scholar] [CrossRef]
- Chan, T.O.; Xia, L.; Lichti, D.D.; Sun, Y.; Wang, J.; Jiang, T.; Li, Q. Geometric Modelling for 3D Point Clouds of Elbow Joints in Piping Systems. Sensors 2020, 20, 4594. [Google Scholar] [CrossRef]
- Cigna, F.; Tapete, D.; Lu, Z. Remote Sensing of Volcanic Processes and Risk. Remote Sens. 2020, 12, 2567. [Google Scholar] [CrossRef]
- Yin, C.; Li, H.; Hu, Z.; Li, Y. Application of the Terrestrial Laser Scanning in Slope Deformation Monitoring: Taking a Highway Slope as an Example. Appl. Sci. 2020, 10, 2808. [Google Scholar] [CrossRef] [Green Version]
- Bakuła, K.; Pilarska, M.; Salach, A.; Kurczyński, Z. Detection of Levee Damage Based on UAS Data—Optical Imagery and LiDAR Point Clouds. ISPRS Int. J. Geo-Inf. 2020, 9, 248. [Google Scholar] [CrossRef] [Green Version]
- Tralli, D.M.; Blom, R.G.; Zlotnicki, V.; Donnellan, A.; Evans, D.L. Satellite remote sensing of an earthquake, volcano, flood, landslide and coastal inundation hazards. ISPRS J. Photogram. Remote Sens. 2005, 59, 185–198. [Google Scholar] [CrossRef]
- Kussul, N.; Skakun, S.; Shelestov, A.; Lavreniuk, M.; Yailymov, B.; Kussul, O. Regional-scale crop mapping using multi-temporal satellite imagery. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2015, 40, 45–52. [Google Scholar] [CrossRef] [Green Version]
- Weintrit, B.; Osińska-Skotak, K.; Pilarska, M. Feasibility study of flood risk monitoring based on optical satellite data. Misc. Geogr. 2018, 22, 172–180. [Google Scholar] [CrossRef] [Green Version]
- Yen, B.C. Hydraulics and Effectiveness of Levees for Flood Control. In the US–Italy Research Workshop on the Hydrometeorology, Impacts, and Management of Extreme Floods. 1995. Available online: https://www.engr.colostate.edu/ce/facultystaff/salas/us-italy/papers/44yen.pdf (accessed on 14 April 2020).
- Long, G.; Mawdesley, M.J.; Smith, M.; Taha, A. Simulation of airborne LiDAR for the assessment of its role in infrastructure asset monitoring. In Proceedings of the 13th International Conference on Computing in Civil and Building Engineering, Nottingham, UK, 30 June–2 July 2010. [Google Scholar]
- Kurczyński, Z.; Bakuła, K. SAFEDAM-zaawansowane technologie wspomagające przeciwdziałanie zagrożeniom związanym z powodziami. Arch. Fotogram. Kartogr. Teledetekcji 2016, 28, 39–52. [Google Scholar]
- Tournadre, V.; Pierrot-Deseilligny, M.; Faure, P.H. UAV photogrammetry to monitor dykes-calibration and comparison to terrestrial lidar. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2014, 40, 143. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Rupnik, E.; Faure, P.H.; Pierrot-Deseilligny, M. GNSS-assisted integrated sensor orientation with sensor pre-calibration for accurate corridor mapping. Sensors 2018, 18, 2783. [Google Scholar] [CrossRef] [Green Version]
- Bakuła, K.; Ostrowski, W.; Szender, M.; Plutecki, W.; Salach, A.; Górski, K. Possibilities for using lidar and photogrammetric data obtained with an unmanned aerial vehicle for levee monitoring. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2016, 41, 773–780. [Google Scholar] [CrossRef] [Green Version]
- Baltsavias, E.P. A comparison between photogrammetry and laser scanning. ISPRS J. Photogram. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Kim, H.; Pyo, H.; Kim, H.; Kang, H.W. Multi-Lens Arrays (MLA)-Assisted Photothermal Effects for Enhanced Fractional Cancer Treatment: Computational and Experimental Validations. Cancers 2021, 13, 1146. [Google Scholar]
- Cariou, E.; Baltzer, A.; Leparoux, D.; Lacombe, V. Collaborative 3D Monitoring for Coastal Survey: Conclusive Tests and First Feedbacks Using the SELPhCoAST Workflow. Geosciences 2021, 11, 114. [Google Scholar] [CrossRef]
- Rebolj, D.; Pučko, Z.; Čuš Babič, N.; Bizjak, Z.; Mongus, D. Point cloud quality requirements for Scan-vs-BIM based automated construction progress monitoring. Autom. Constr. 2017, 84, 323–334. [Google Scholar] [CrossRef]
- EN 338:2004. Structural Timber—Strength Classes; European Committee for Standardization: Brussels, Belgium, 2009. [Google Scholar]
- Smogavec, L. Uporabnost Terestričnega Laserskega Skeniranja Pri Izdelavi Geodetskega Načrta. Ph.D. Thesis, University of Ljubljana, Ljubljana, Slovenija, 2015. [Google Scholar]
- Opravš, P. Postopek in Natančnosti Tehnologije 3R Terestričnega Laserskega Skeniranja. Ph.D. Thesis, University of Ljubljana, Ljubljana, Slovenija, 2008. [Google Scholar]
- Đapo, A. Terestričko Lasersko Skeniranje; Faculty of Geodesy, University of Zagreb: Zagreb, Croatia, 2008. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Beam | Humidity (%) | m (kg) | V (m3) | ρk (kg/m3) | fm,k (MPa) |
|---|---|---|---|---|---|
| TL_01 | 10. | 22.1 | 0.05808 | 380.51 | 24 |
| TO_01 | 11.2 | 26.05 | 0.05808 | 448.52 | 24 |
| TW_01 | 10.5 | 22.5 | 0.05808 | 388.12 | 24 |
| RTS | Sprinter | TLS | DTM 730 | Zeiss Dini 10 | |
|---|---|---|---|---|---|
| Accuracy (angle) | 0.5″ (0.15 mgon) | 18″ | 1″to 3″ | ||
| Accuracy (distance) | 0.6 mm + 1 ppm | 0.6 mm (per 1 km) | 1 mm + 10 ppm | 2 mm + 2 ppm | 0.1 to 0.7 mm (per 1 km) |
| working range | 1.5 m to 3500 m | 2 to 100 m | 0.5 m to 130 m | 2 m to 2500 m | 1.5 m to 100 m |
| Number of readings (per sec) | 9 | 3 | 1 milion | 3 | 5 |
| TL_01 | |||||||
| Target | Static Analyses | Leica RTC 360 LT | Leica RTS NOVA TS 50 | ||||
| z [mm] | z [mm] | |Δz|[mm] | |Δz|[%] | z [mm] | |Δz|[mm] | |Δz|[%] | |
| 1 | −4.9 | −3.8 | 1.1 | 23.89 | −5.0 | 0.1 | 0.14 |
| 2 | −8.5 | −6.9 | 1.6 | 19.48 | −7.9 | 0.6 | 7.81 |
| 3 | −9.8 | −9.0 | 0.8 | 8.70 | −9.8 | 0.0 | 0.00 |
| 4 | −8.5 | −7.1 | 1.4 | 17.14 | −8.0 | 0.5 | 8.97 |
| 5 | −4.9 | −4.1 | 0.8 | 17.89 | −5.1 | 0.2 | 2.14 |
| TL_01 | |||||||
| Target | Zeiss DiNi | Leica Sprinter | Nikon DTM 700 | ||||
| z [mm/%] | z [mm] | |Δz|[mm] | |Δz|[%] | z [mm] | |Δz|[mm] | |Δz|[%] | |
| 1 | −6.1 | 1.1 | 22.17 | −4.7 | 0.2 | 5.86 | |
| 2 | −9.6 | 1.1 | 12.03 | −8.2 | 0.3 | 4.31 | |
| 3 | −10.5 (6.51%) | −10.4 | 0.6 | 5.48 | −10.4 | 0.6 | 5.49 |
| 4 | −9.1 | 0.6 | 6.20 | −9.1 | 0.6 | 6.20 | |
| 5 | −6.0 | 1.1 | 20.17 | −6.0 | 1.1 | 20.17 | |
| TO_01 | |||||||
| Target | Static Analyses | Leica RTC 360 LT | Leica RTS NOVA TS 50 | ||||
| z [mm] | z [mm] | |Δz|[mm] | |Δz|[%] | z [mm] | |Δz|[mm] | |Δz|[%] | |
| 1 | −4.1 | −3.6 | 0.5 | 12.20 | −3.9 | 0.2 | 4.88 |
| 2 | −7.0 | −5.9 | 1.1 | 16.19 | −6.9 | 0.1 | 1.99 |
| 3 | −8.1 | −7.9 | 0.2 | 2.47 | −8.1 | 0.0 | 0.00 |
| 4 | −7.0 | −5.8 | 1.2 | 17.61 | −6.8 | 0.2 | 3.41 |
| 5 | −4.1 | −3.7 | 0.4 | 9.76 | −4.0 | 0.1 | 2.44 |
| TO_01 | |||||||
| Target | Zeiss DiNi | Leica Sprinter | Nikon DTM 700 | ||||
| z [mm/%] | z [mm] | |Δz|[mm] | |Δz|[%] | z [mm] | |Δz|[mm] | |Δz|[%] | |
| 1 | −4.9 | 0.8 | 16.33 | −5.0 | 0.9 | 18.00 | |
| 2 | −7.4 | 0.4 | 4.86 | −7.5 | 0.5 | 6.13 | |
| 3 | −8.8 (8.64%) | −9.1 | 1.0 | 10.99 | −9.3 | 1.2 | 12.90 |
| 4 | −7.4 | 0.4 | 4.86 | −7.7 | 0.7 | 8.57 | |
| 5 | −4.6 | 0.5 | 10.86 | −4.9 | 0.8 | 16.33 | |
| TW_01 | |||||||
| Target | Static Analyses | Leica RTC 360 LT | Leica RTS NOVA TS 50 | ||||
| z [mm] | z [mm] | |Δz|[mm] | |Δz|[%] | z [mm] | |Δz|[mm] | |Δz|[%] | |
| 1 | −4.6 | −5.4 | 0.8 | 17.24 | −4.8 | 0.2 | 4.21 |
| 2 | −7.9 | −8.9 | 1.0 | 12.52 | −6.8 | 1.1 | 14.03 |
| 3 | −9.1 | −10.0 | 0.9 | 9.88 | −9.8 | 0.7 | 7.68 |
| 4 | −7.9 | −9.0 | 1.1 | 13.78 | −6.8 | 1.1 | 14.03 |
| 5 | −4.6 | −5.6 | 1.0 | 21.58 | −4.7 | 0.1 | 2.04 |
| TW_01 | |||||||
| Target | Zeiss DiNi | Leica Sprinter | Nikon DTM 700 | ||||
| z [mm/%] | z [mm] | |Δz|[mm] | |Δz|[%] | z [mm] | |Δz|[mm] | |Δz|[%] | |
| 1 | −4.4 | 0.2 | 4.55 | −4.8 | 0.2 | 4.04 | |
| 2 | −6.5 | 1.4 | 17.83 | −7.5 | 0.4 | 5.47 | |
| 3 | −8.4 (7.69%) | −8.1 | −1.0 | 10.99 | −8.9 | 0.2 | 2.26 |
| 4 | −6.8 | −1.1 | 14.03 | −7.3 | 0.6 | 8.36 | |
| 5 | −4.6 | 0.0 | 0.21 | −4.5 | 0.1 | 2.38 | |
| Beam | Leica RTC 360 LT | Leica RTS NOVA TS 50 | ||
|---|---|---|---|---|
| |Δz|[mm] | |Δz|[%] | |Δz|[mm] | |Δz|[%] | |
| TL_01 | 1.2 | 17.42 | 0.3 | 3.93 |
| TO_01 | 0.7 | 11.65 | 0.1 | 2.54 |
| TW_01 | 0.9 | 15.00 | 0.2 | 8.40 |
| Average | 0.9 | 14.69 | 0.2 | 4.957 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kovačič, B.; Štraus, L.; Držečnik, M.; Pučko, Z. Applicability and Analysis of the Results of Non-Contact Methods in Determining the Vertical Displacements of Timber Beams. Appl. Sci. 2021, 11, 8936. https://doi.org/10.3390/app11198936
Kovačič B, Štraus L, Držečnik M, Pučko Z. Applicability and Analysis of the Results of Non-Contact Methods in Determining the Vertical Displacements of Timber Beams. Applied Sciences. 2021; 11(19):8936. https://doi.org/10.3390/app11198936
Chicago/Turabian StyleKovačič, Boštjan, Luka Štraus, Mateja Držečnik, and Zoran Pučko. 2021. "Applicability and Analysis of the Results of Non-Contact Methods in Determining the Vertical Displacements of Timber Beams" Applied Sciences 11, no. 19: 8936. https://doi.org/10.3390/app11198936
APA StyleKovačič, B., Štraus, L., Držečnik, M., & Pučko, Z. (2021). Applicability and Analysis of the Results of Non-Contact Methods in Determining the Vertical Displacements of Timber Beams. Applied Sciences, 11(19), 8936. https://doi.org/10.3390/app11198936