
Barrier Function Based Adaptive Sliding Mode Controller for a Hybrid AC/DC Microgrid Involving Multiple Renewables

 ,
,  , , , and
, , , and 
Abstract
:1. Introduction
- Low-Level Control: It ensures the regulation of input and output current flow from power converters referred to their reference signals produced by the high-level controller;
- High-Level Control: It ensures the AC/DC microgrid’s stability by monitoring the state of charge (SoC).
- Multiple control laws to ensure the stability of the DC bus and AC bus under the load varying conditions, external disturbances, and impulsiveness of RESs;
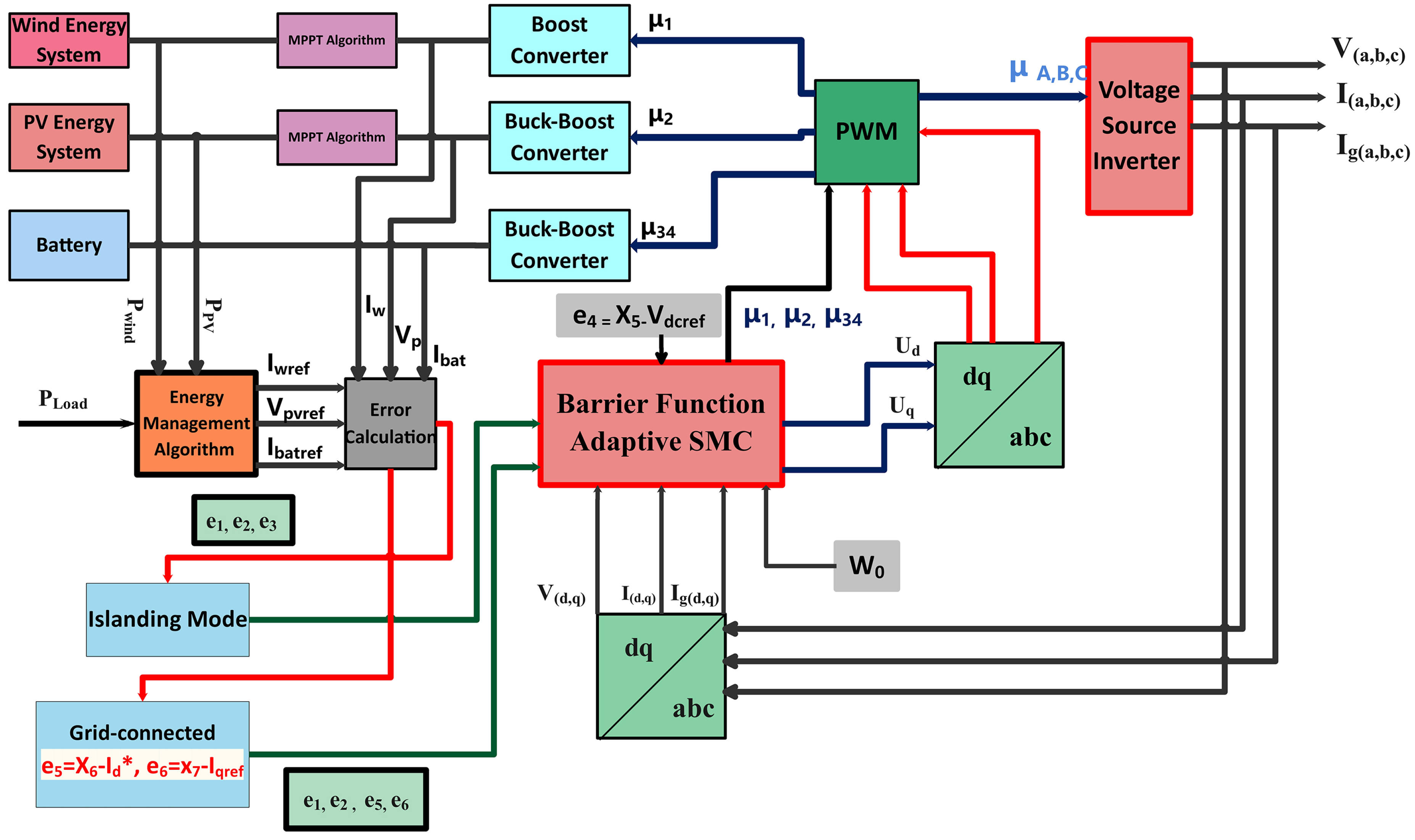
- Global modeling of the system and implementation of BFASMC controller;
- Real-time hardware-in-loop (HIL) analysis, which, validates the efficiency for the practical implementation of the controller.
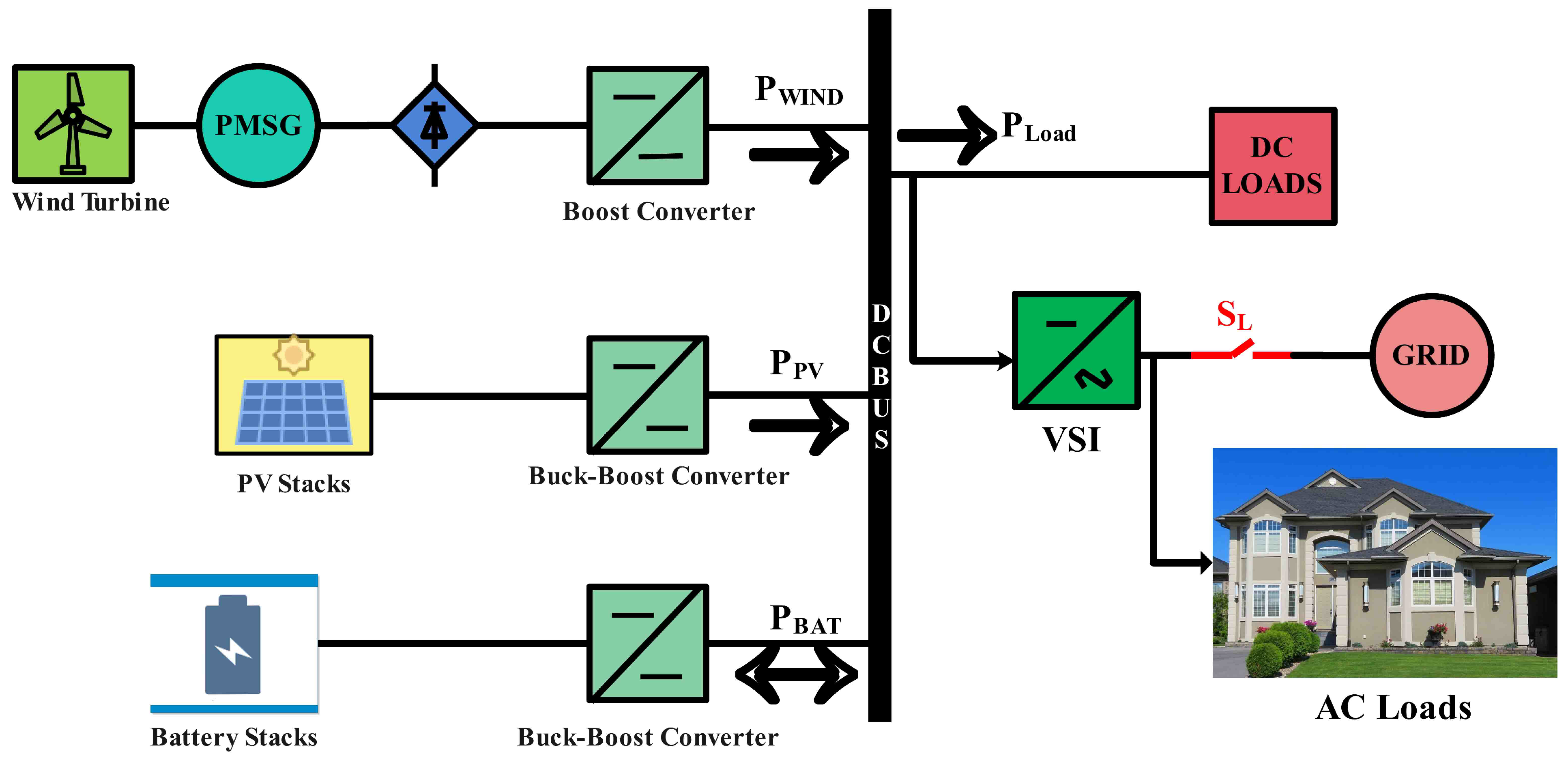
2. Modeling of the DC Sub-Microgrid
2.1. Modeling of Wind Energy Generation Unit
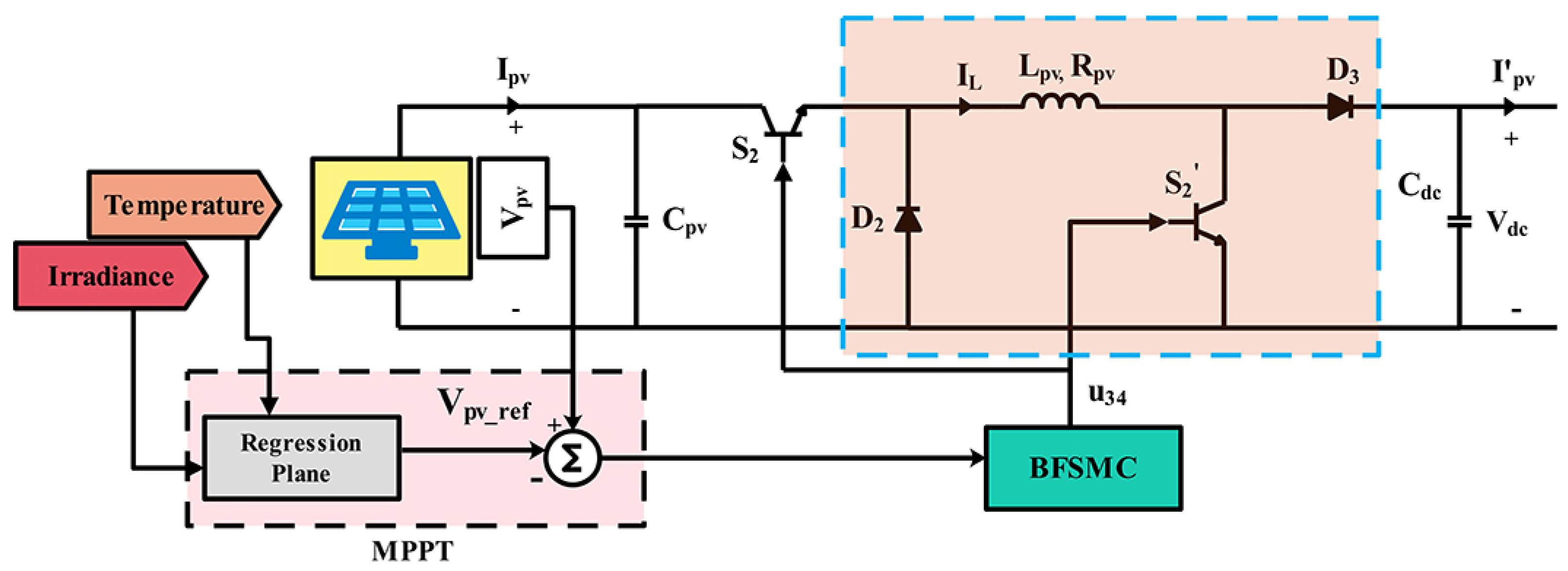
2.2. Modeling of PV System
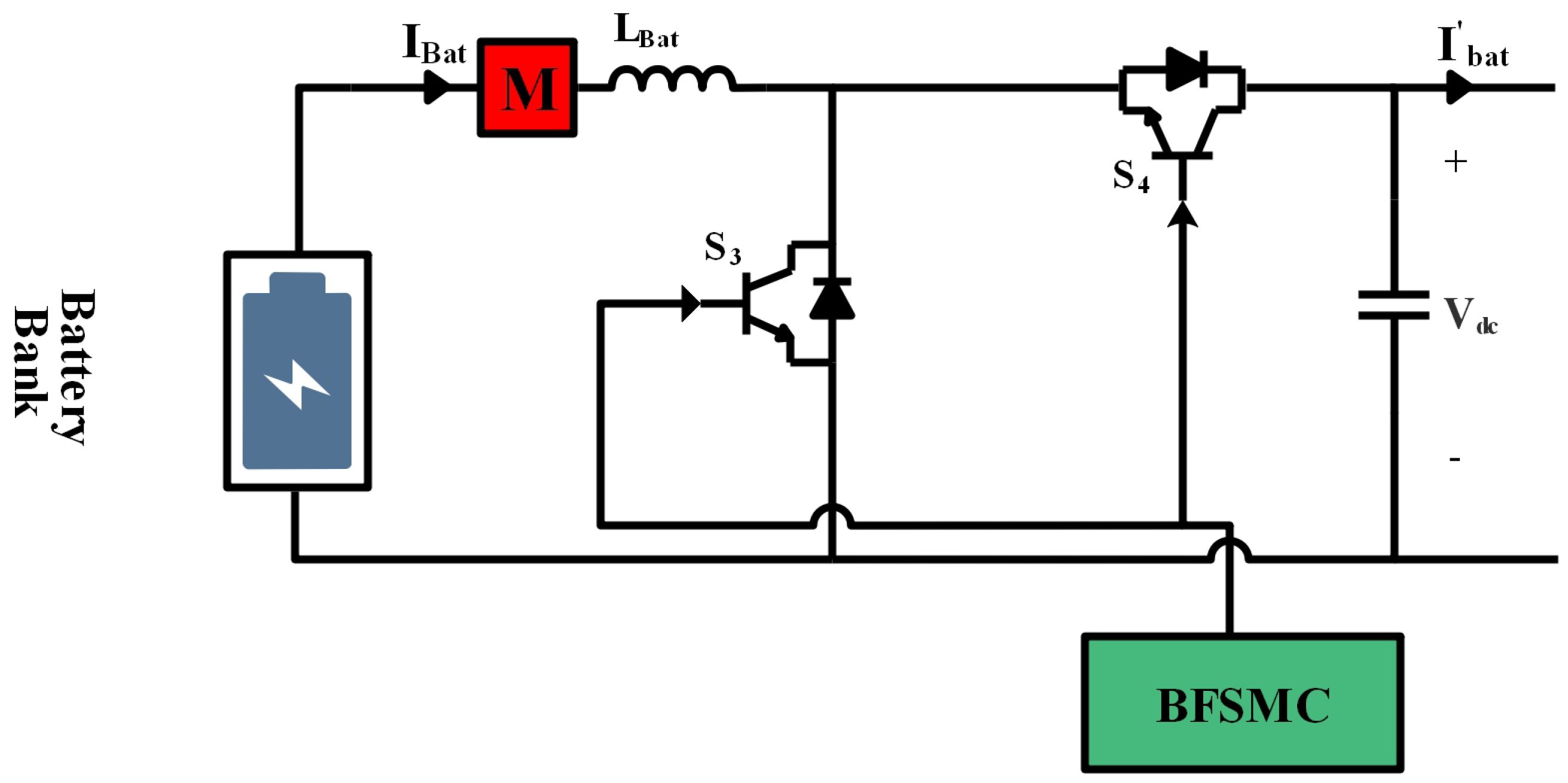
2.3. Modeling of Energy Storage System (ESS)
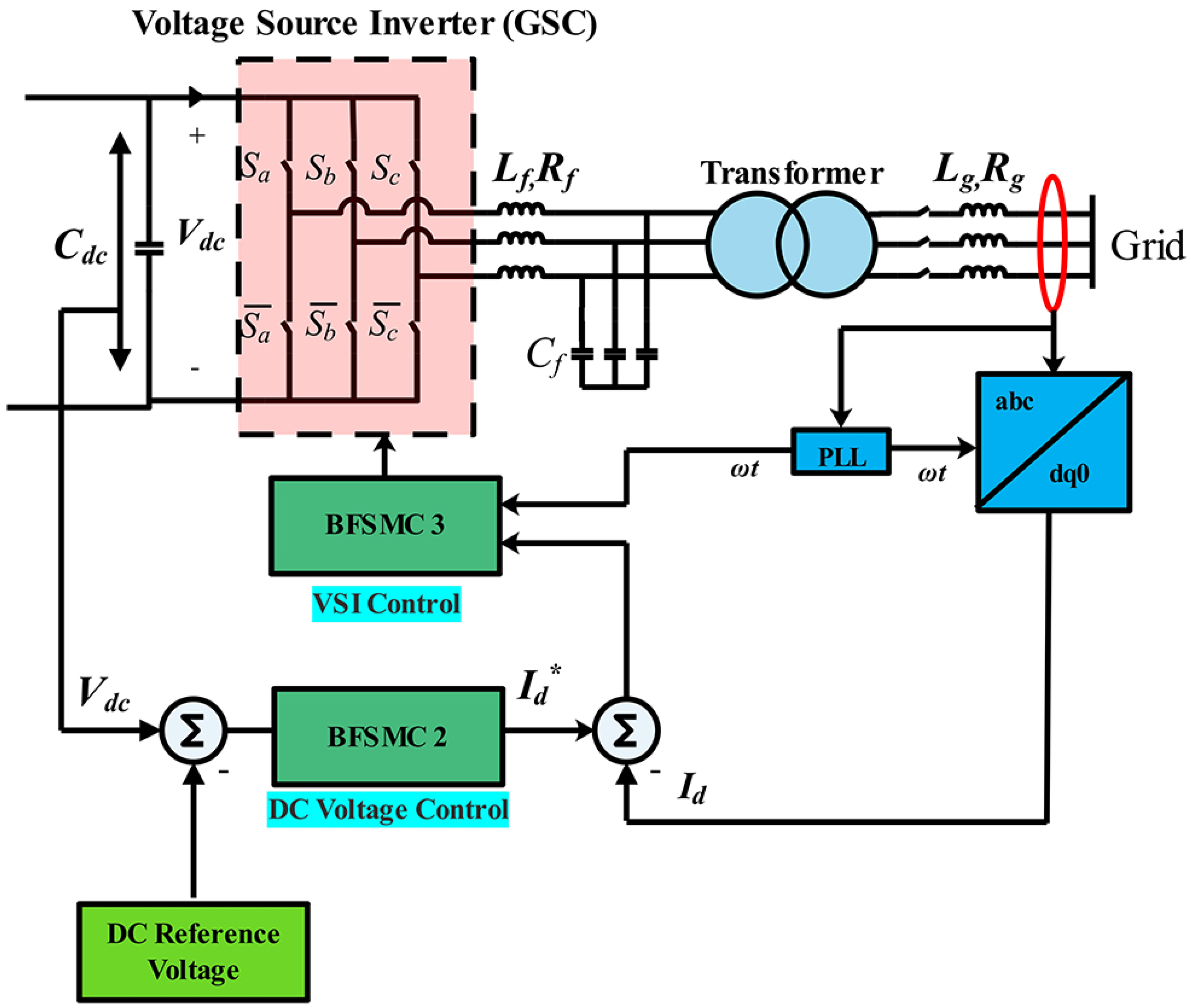
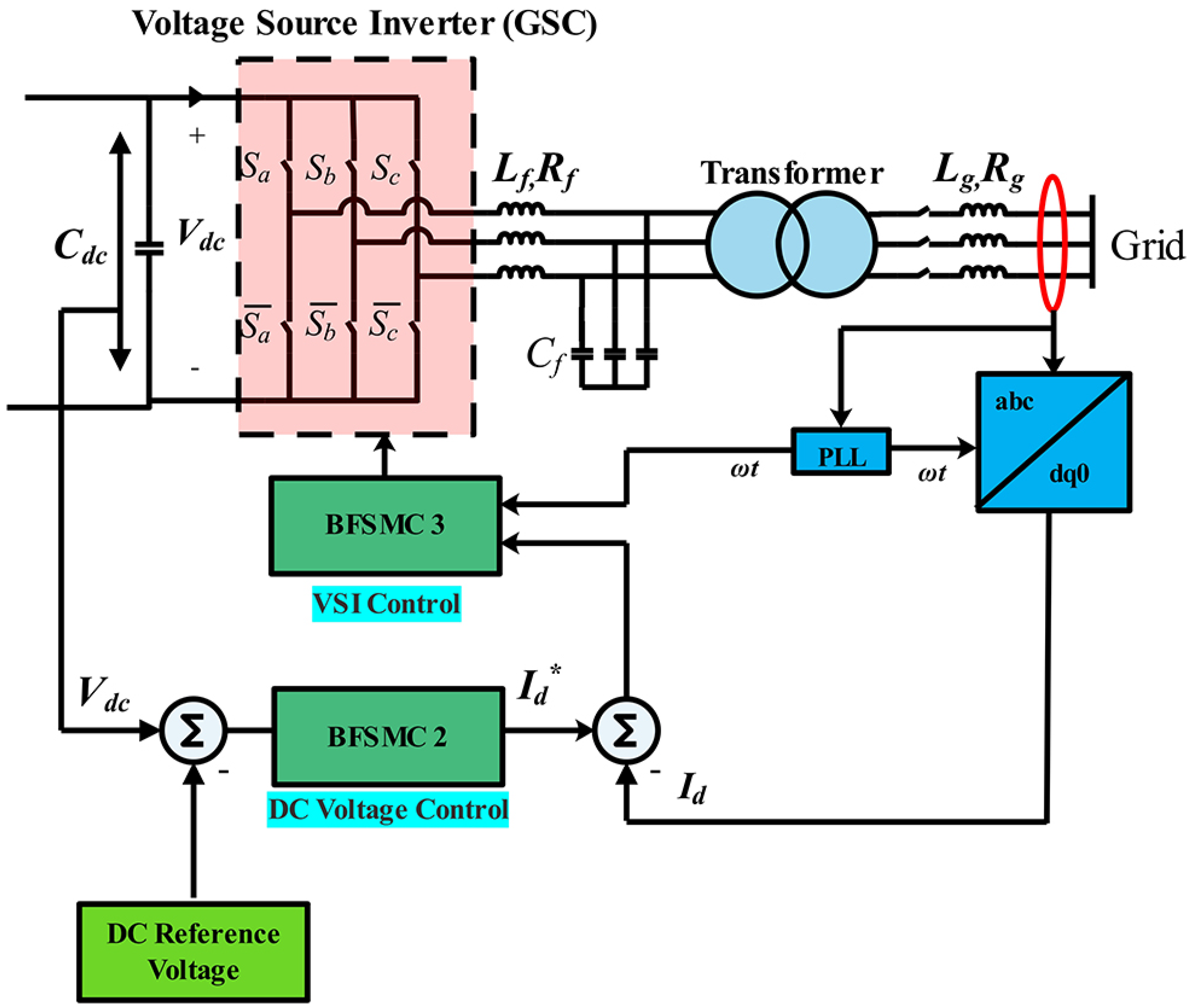
2.4. Modeling of AC Sub-Grid
2.5. Global Modeling (Islanded Mode)
2.6. Global Modeling (Grid-Connected Mode)
3. Controller Design
3.1. Barrier Function for Sliding Mode Controller
- Positive definite barrier functions (PBFs): Let assume some fixed , which leads to a continuous even function , firmly cumulative on . So PBF will be:
- Positive semi-definite barrier functions (PSBFs): Following equation defines the PSBF as:
3.2. Control of Islanding Mode of DC Sub-Grid
3.3. Control during Grid-Connected Mode of AC Sub-Grid
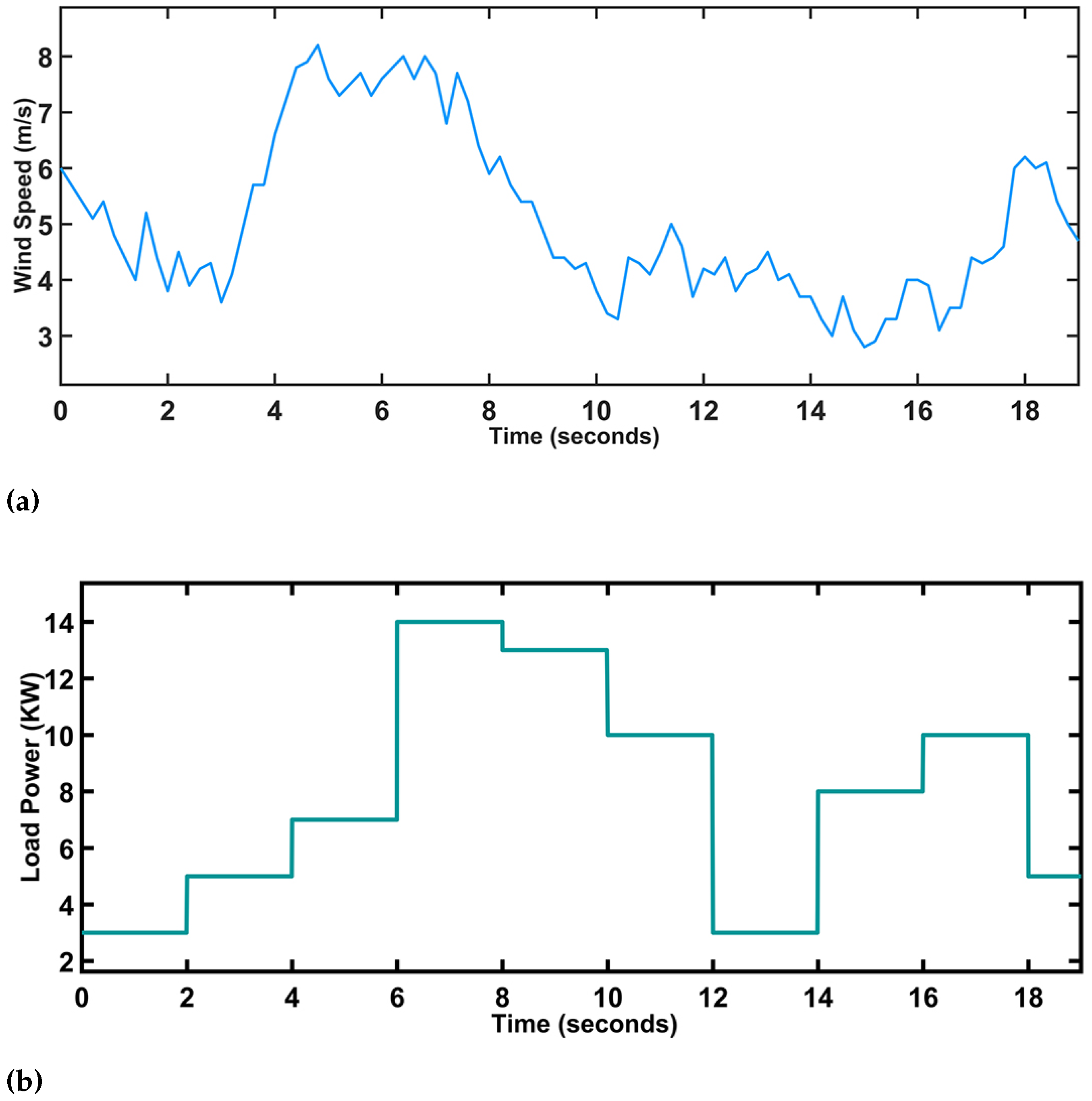
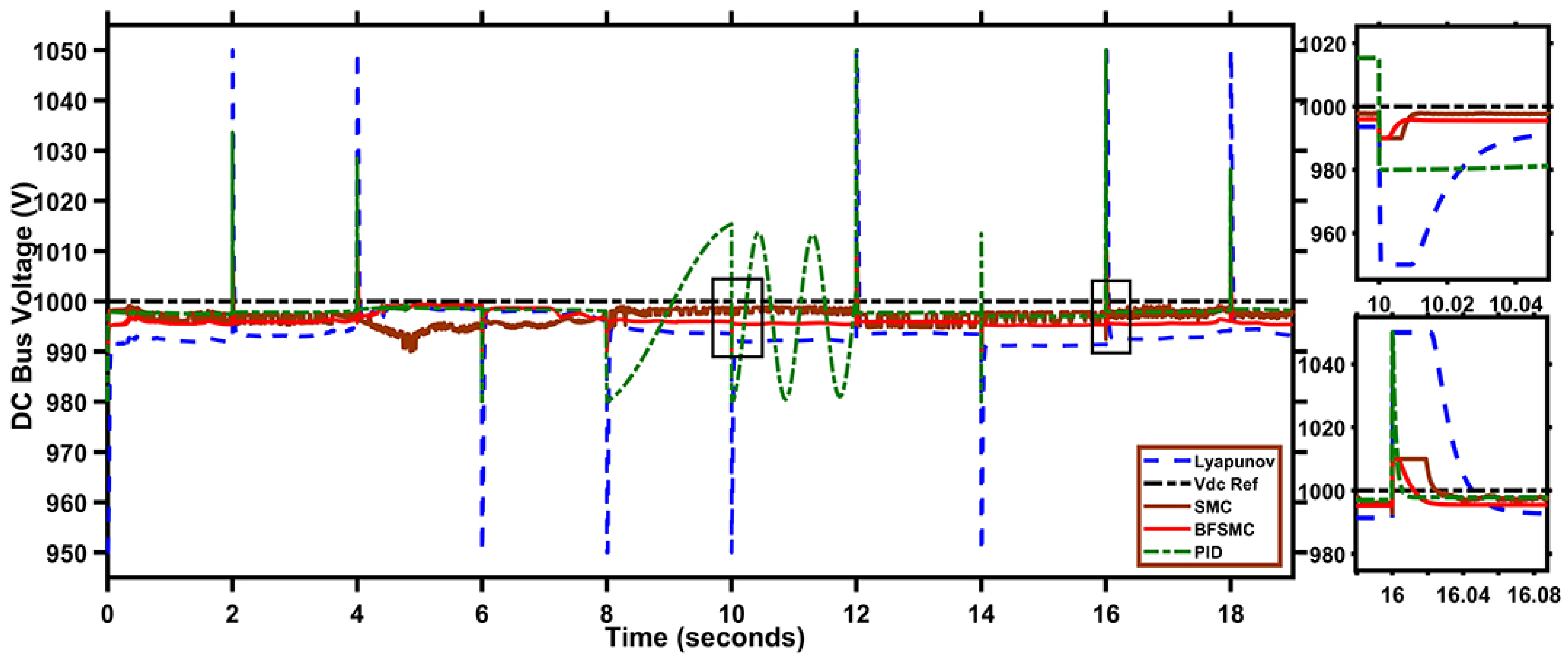
4. Results and Discussion
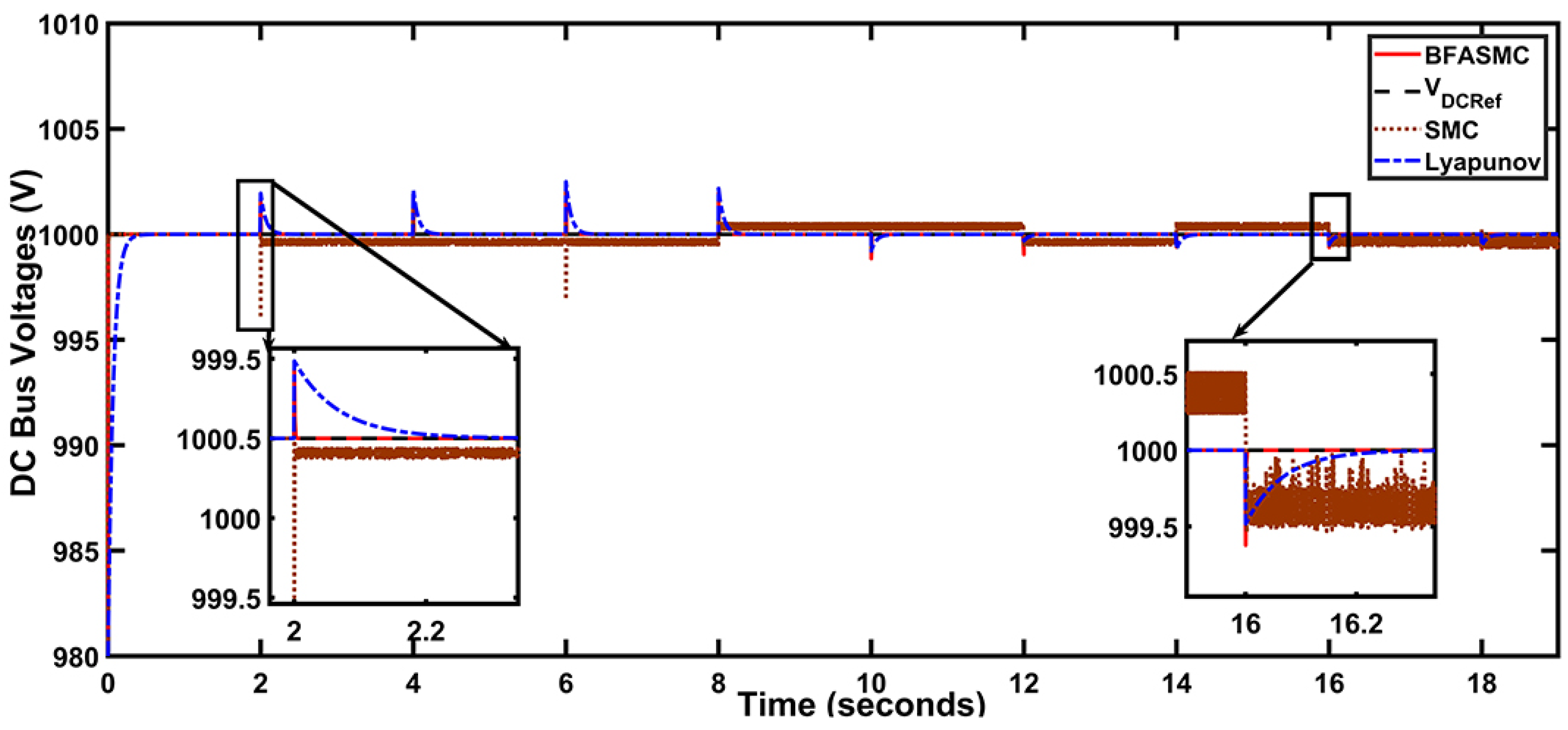
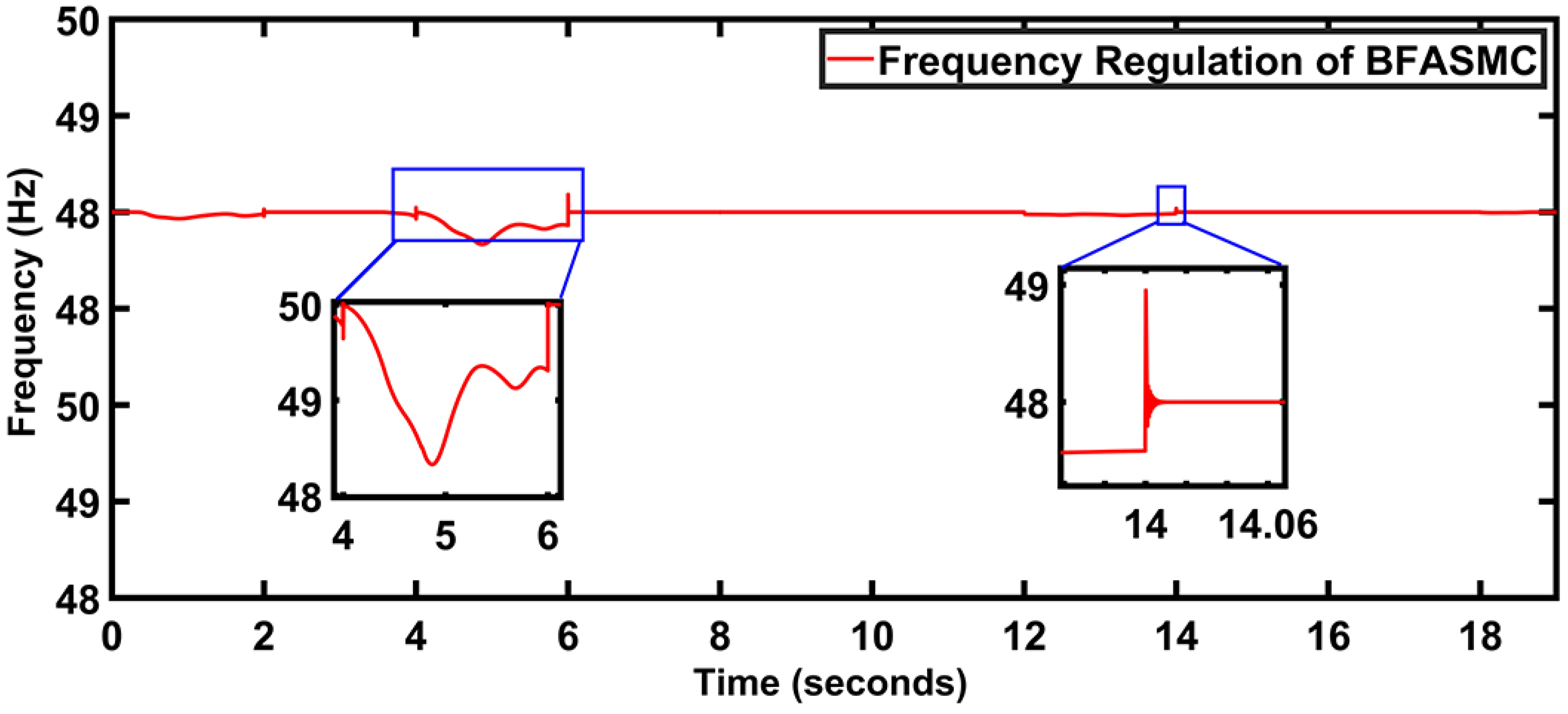
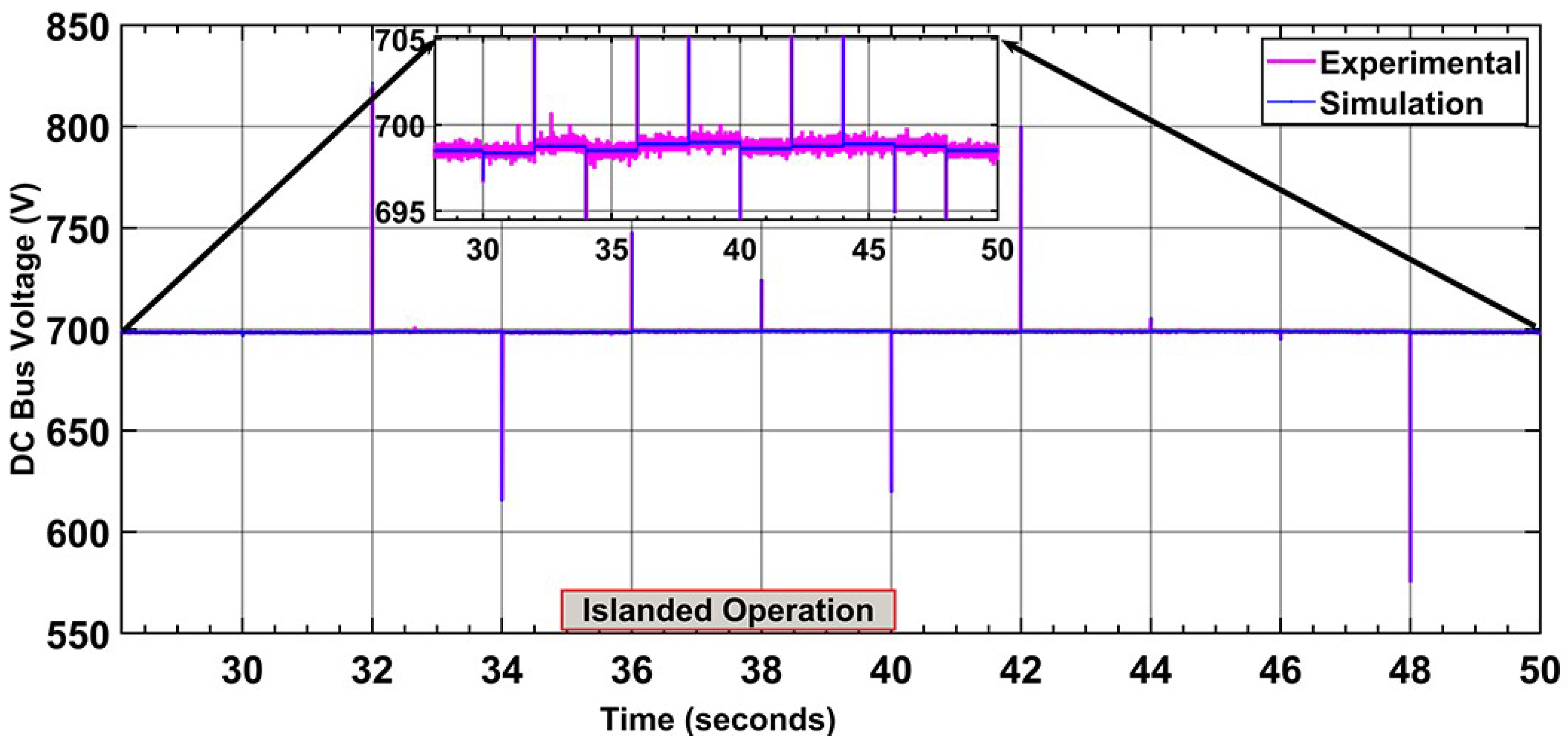
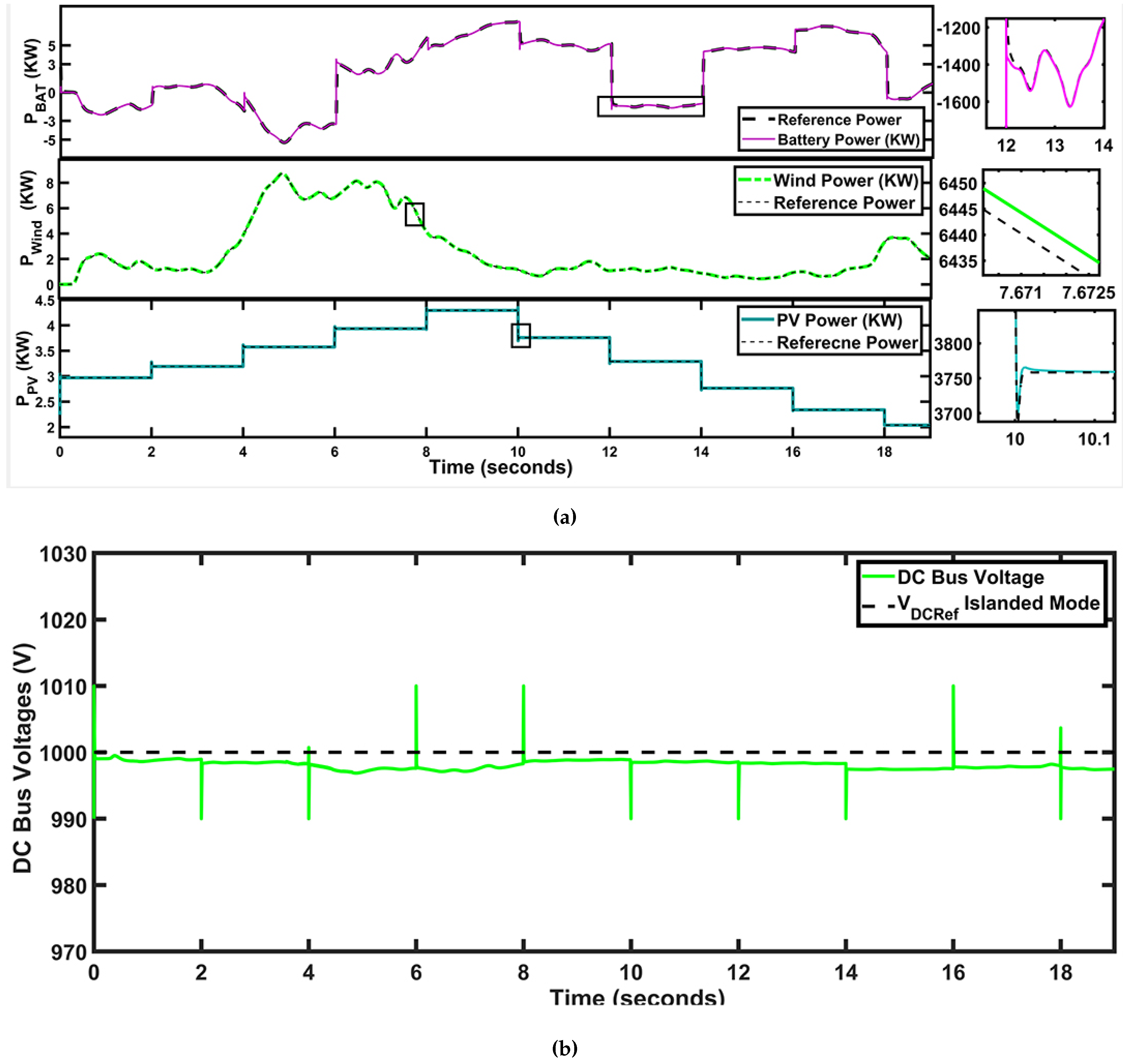
4.1. Islanding Mode
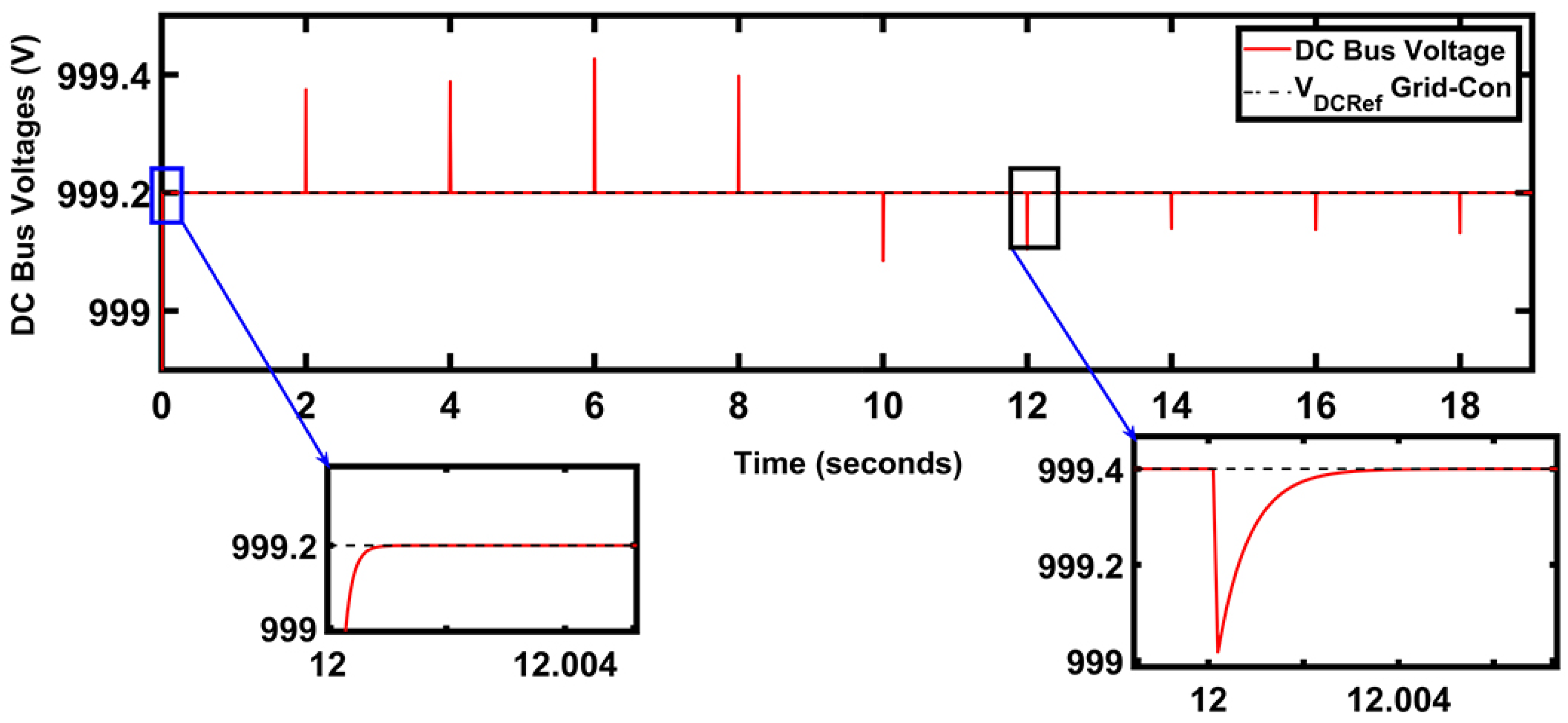
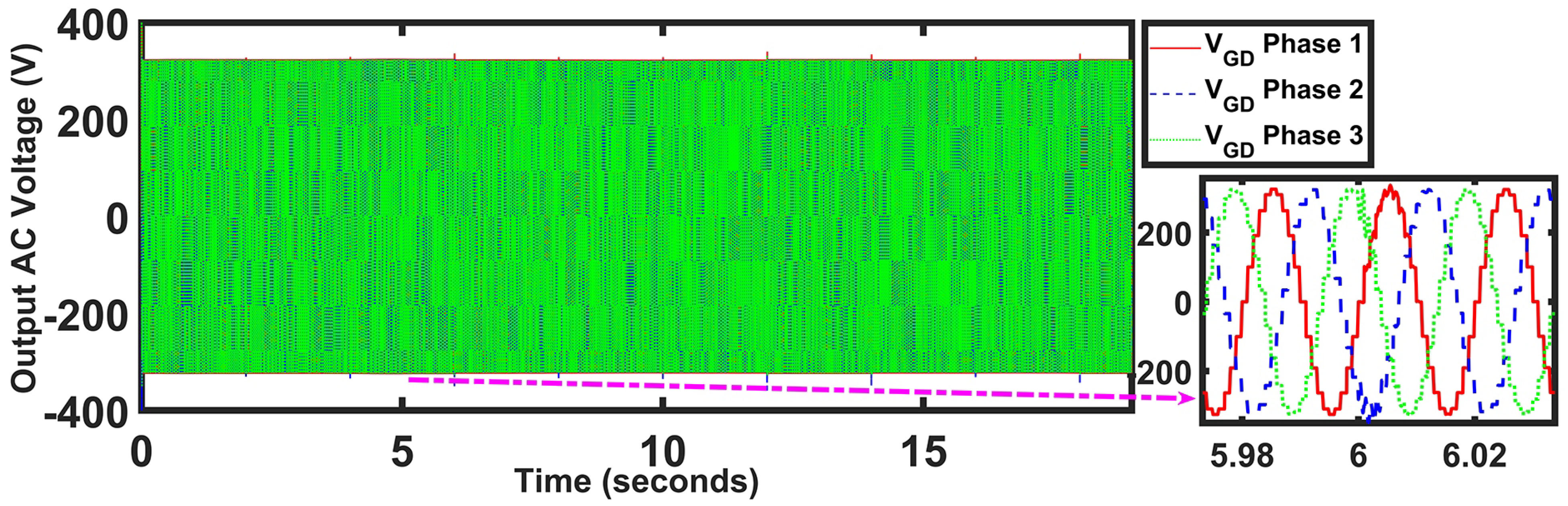
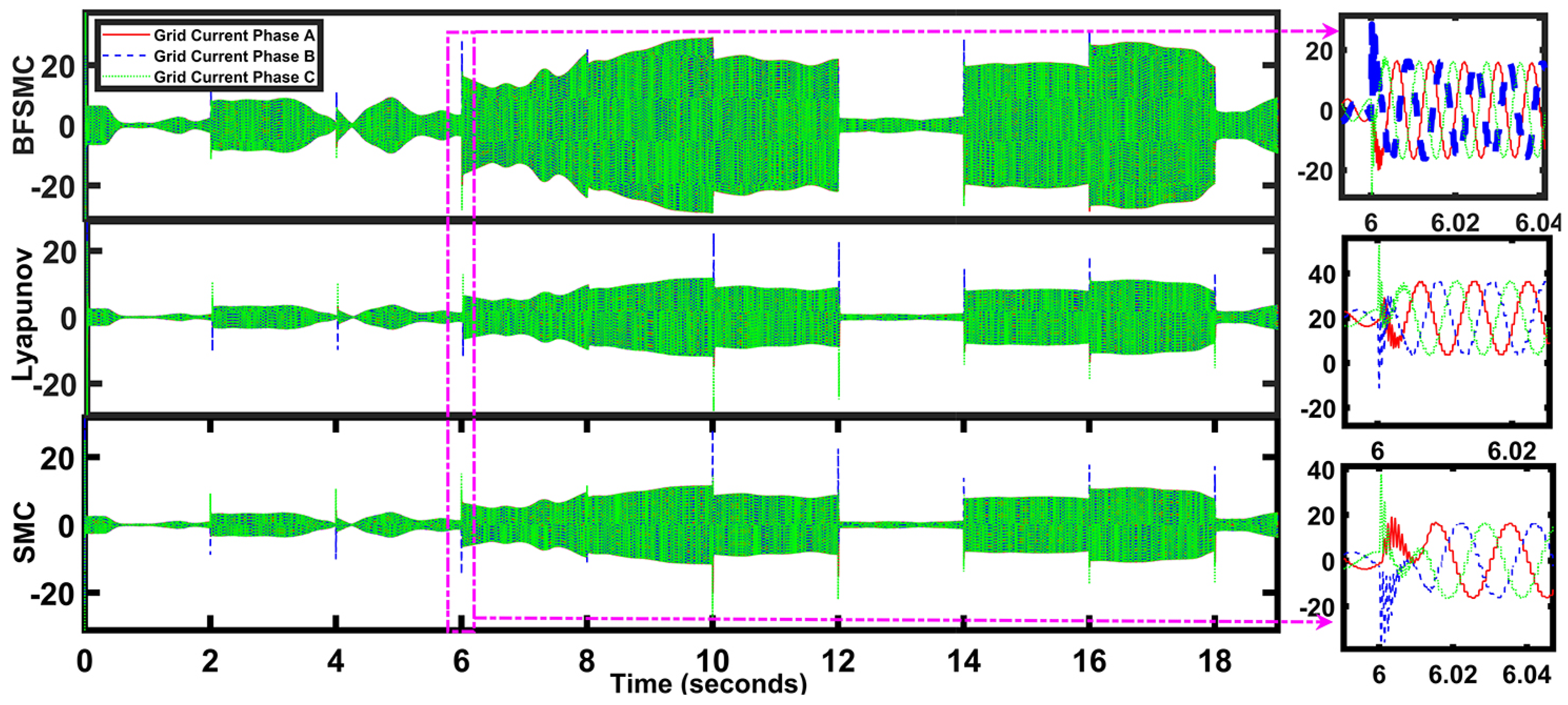
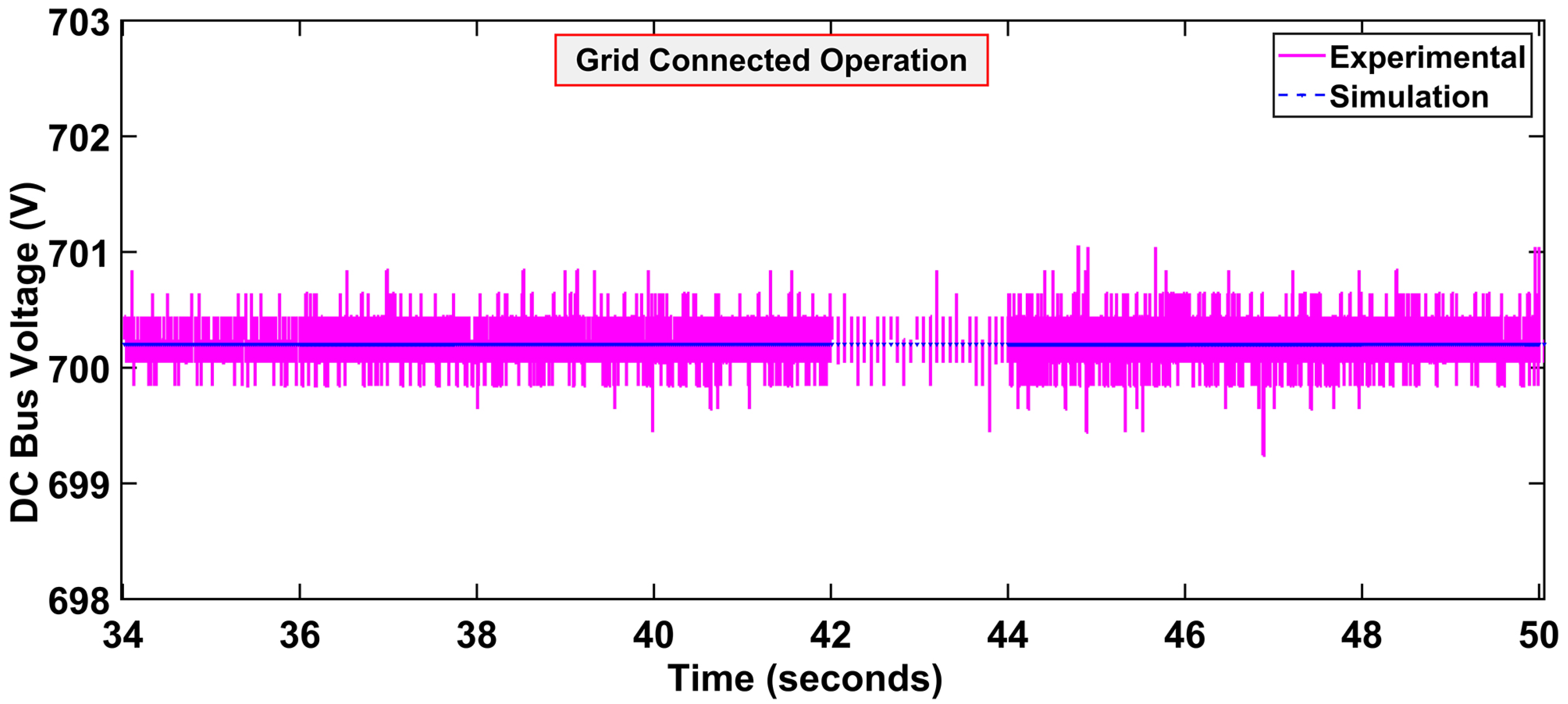
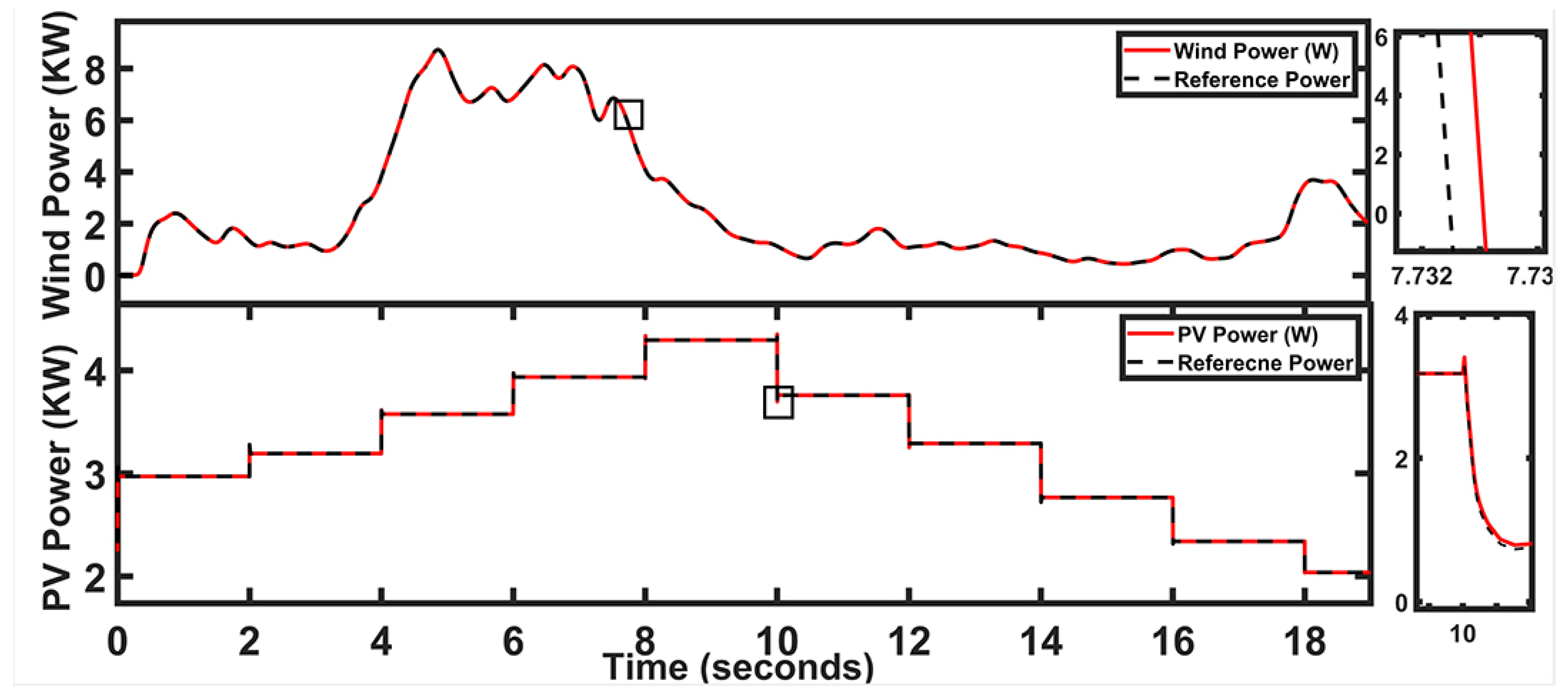
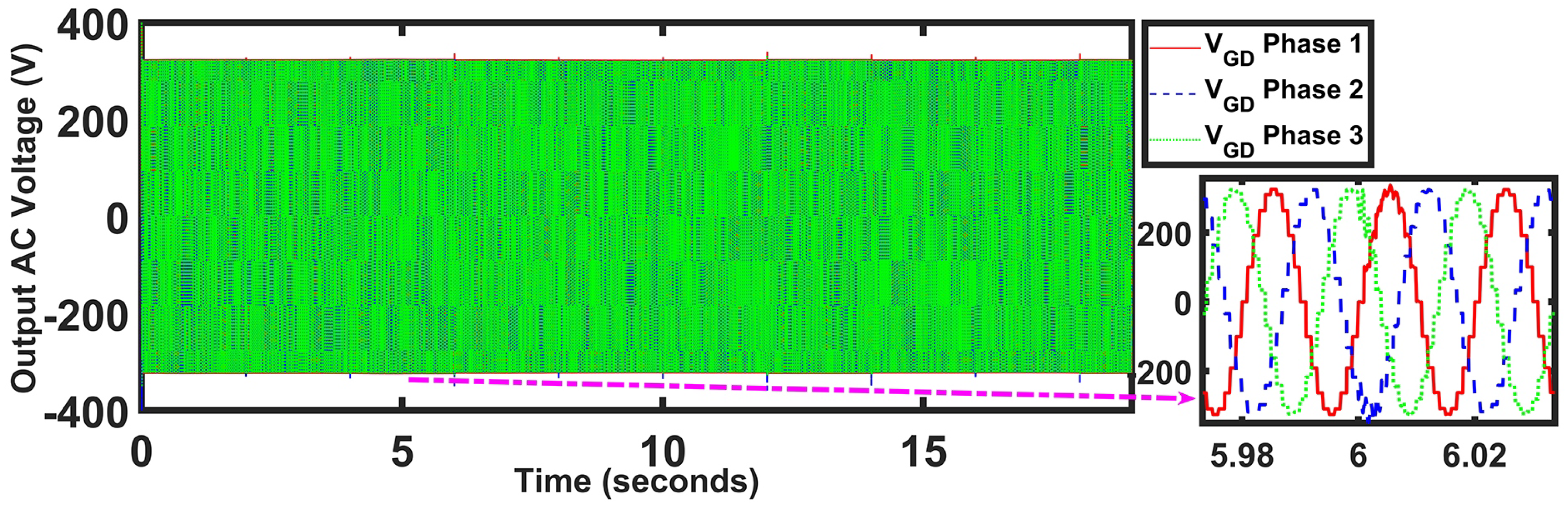
4.2. Grid-Connected Mode
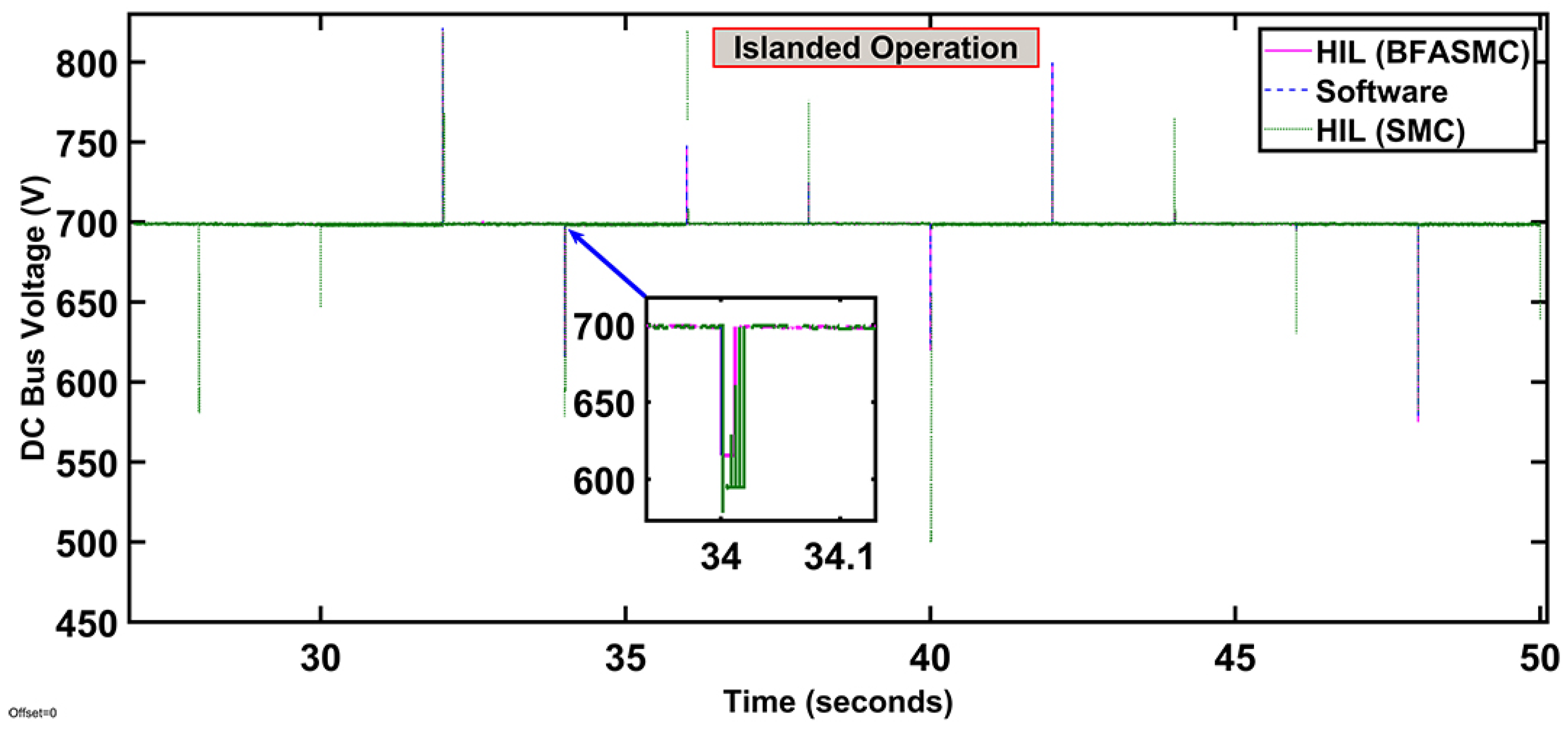
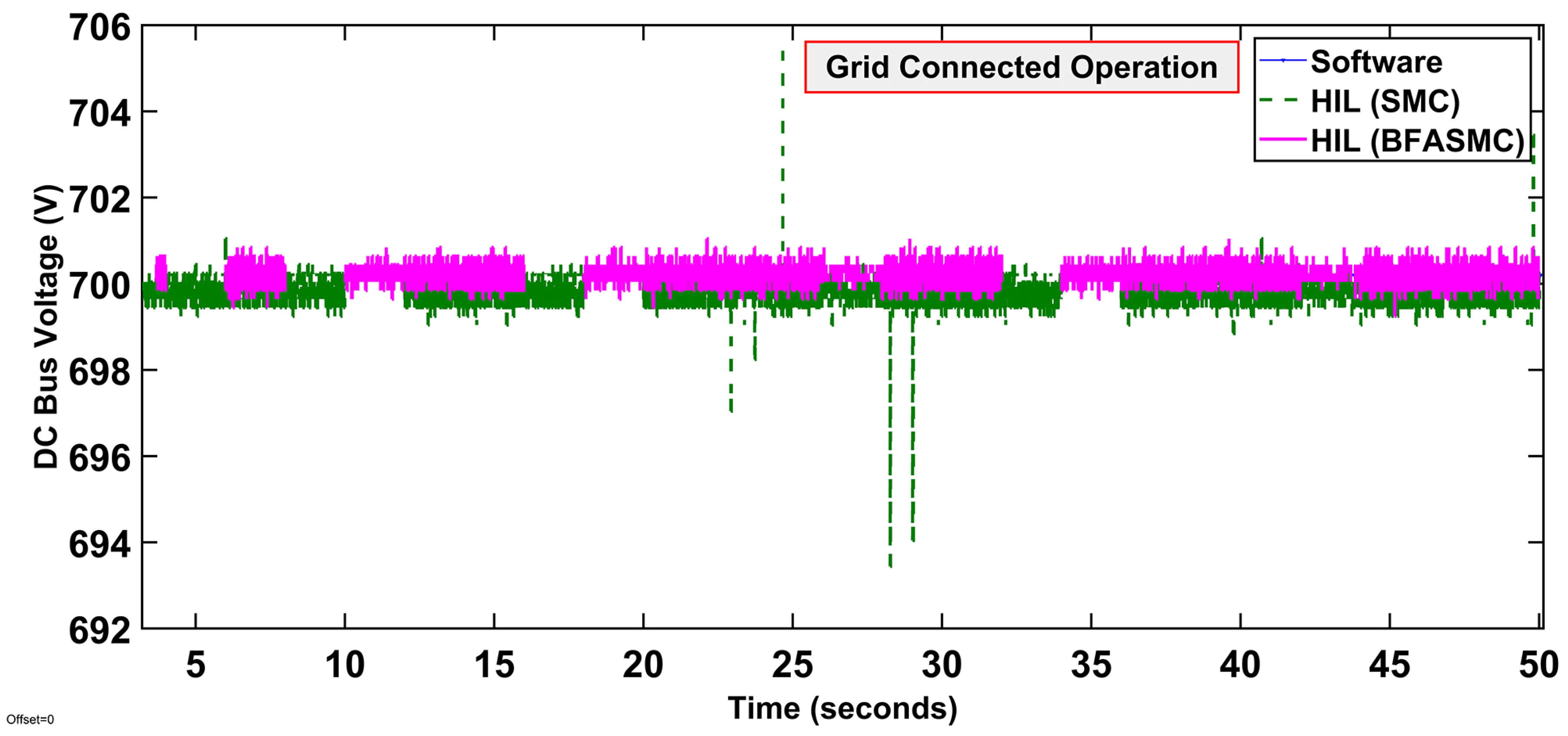
4.3. Hardware in the Loop Analysis
4.3.1. Islanding Operation
4.3.2. Grid-Connected Operation
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bull, S.R. Renewable energy today and tomorrow. Proc. IEEE 2001, 89, 1216–1226. [Google Scholar] [CrossRef]
- Lasseter, R.H.; Paigi, P. Microgrid: A conceptual solution. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No. 04CH37551), Aachen, Germany, 20–25 June 2004; Volume 6, pp. 4285–4290. [Google Scholar]
- Benson, C.L.; Magee, C.L. On improvement rates for renewable energy technologies: Solar PV, wind turbines, capacitors, and batteries. Renew. Energy 2014, 68, 745–751. [Google Scholar] [CrossRef]
- Bari, A.; Jiang, J.; Saad, W.; Jaekel, A. Challenges in the smart grid applications: An overview. Int. J. Distrib. Sens. Netw. 2014, 10, 974682. [Google Scholar] [CrossRef] [Green Version]
- Luna, A.C.; Diaz, N.L.; Graells, M.; Vasquez, J.C.; Guerrero, J.M. Mixed-integer-linear-programming-based energy management system for hybrid PV-wind-battery microgrids: Modeling, design, and experimental verification. IEEE Trans. Power Electron. 2016, 32, 2769–2783. [Google Scholar] [CrossRef] [Green Version]
- Khare, V.; Nema, S.; Baredar, P. Solar–wind hybrid renewable energy system: A review. Renew. Sustain. Energy Rev. 2016, 58, 23–33. [Google Scholar] [CrossRef]
- Atia, R.; Yamada, N. Sizing and analysis of renewable energy and battery systems in residential microgrids. IEEE Trans. Smart Grid 2016, 7, 1204–1213. [Google Scholar] [CrossRef]
- Elsayed, A.T.; Mohamed, A.A.; Mohammed, O.A. DC microgrids and distribution systems: An overview. Electr. Power Syst. Res. 2015, 119, 407–417. [Google Scholar] [CrossRef]
- Alanazi, A.; Lotfi, H.; Khodaei, A. Coordinated AC/DC microgrid optimal scheduling. In Proceedings of the 2017 North American Power Symposium (NAPS), Morgantown, WV, USA, 17–19 September 2017; pp. 1–6. [Google Scholar]
- Zhou, X.; Zhou, L.; Chen, Y.; Guerrero, J.M.; Luo, A.; Wu, W.; Yang, L. A microgrid cluster structure and its autonomous coordination control strategy. Int. J. Electr. Power Energy Syst. 2018, 100, 69–80. [Google Scholar] [CrossRef]
- Wang, P.; Goel, L.; Liu, X.; Choo, F.H. Harmonizing AC and DC: A hybrid AC/DC future grid solution. IEEE Power Energy Mag. 2013, 11, 76–83. [Google Scholar] [CrossRef]
- Pourbehzadi, M.; Niknam, T.; Aghaei, J.; Mokryani, G.; Shafie-khah, M.; Catalão, J.P. Optimal operation of hybrid AC/DC microgrids under uncertainty of renewable energy resources: A comprehensive review. Int. J. Electr. Power Energy Syst. 2019, 109, 139–159. [Google Scholar] [CrossRef]
- Yang, P.; Xia, Y.; Yu, M.; Wei, W.; Peng, Y. A decentralized coordination control method for parallel bidirectional power converters in a hybrid AC–DC microgrid. IEEE Trans. Ind. Electron. 2017, 65, 6217–6228. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Power management of an isolated hybrid AC/DC micro-grid with fuzzy control of battery banks. IET Renew. Power Gener. 2015, 9, 484–493. [Google Scholar] [CrossRef]
- Merabet, A.; Ahmed, K.T.; Ibrahim, H.; Beguenane, R.; Ghias, A.M. Energy management and control system for laboratory scale microgrid based wind-PV-battery. IEEE Trans. Sustain. Energy 2016, 8, 145–154. [Google Scholar] [CrossRef]
- Hu, J.; Shan, Y.; Xu, Y.; Guerrero, J.M. A coordinated control of hybrid ac/dc microgrids with PV-wind-battery under variable generation and load conditions. Int. J. Electr. Power Energy Syst. 2019, 104, 583–592. [Google Scholar] [CrossRef] [Green Version]
- Iovine, A.; Siad, S.B.; Damm, G.; De Santis, E.; Di Benedetto, M.D. Nonlinear control of a dc microgrid for the integration of photovoltaic panels. IEEE Trans. Autom. Sci. Eng. 2017, 14, 524–535. [Google Scholar] [CrossRef] [Green Version]
- Armghan, H.; Yang, M.; Wang, M.; Ali, N.; Armghan, A. Nonlinear integral backstepping based control of a DC microgrid with renewable generation and energy storage systems. Int. J. Electr. Power Energy Syst. 2020, 117, 105613. [Google Scholar] [CrossRef]
- Mohamed, Y.A.R.I.; Zeineldin, H.H.; Salama, M.; Seethapathy, R. Seamless formation and robust control of distributed generation microgrids via direct voltage control and optimized dynamic power sharing. IEEE Trans. Power Electron. 2011, 27, 1283–1294. [Google Scholar] [CrossRef]
- Kumar, M.; Srivastava, S.; Singh, S. Control strategies of a DC microgrid for grid connected and islanded operations. IEEE Trans. Smart Grid 2015, 6, 1588–1601. [Google Scholar] [CrossRef]
- Singh, S.; Fulwani, D.; Kumar, V. Robust sliding-mode control of dc/dc boost converter feeding a constant power load. IET Power Electron. 2015, 8, 1230–1237. [Google Scholar] [CrossRef]
- Kim, J.; Guerrero, J.M.; Rodriguez, P.; Teodorescu, R.; Nam, K. Mode adaptive droop control with virtual output impedances for an inverter-based flexible AC microgrid. IEEE Trans. Power Electron. 2010, 26, 689–701. [Google Scholar] [CrossRef]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of power sharing control strategies for islanding operation of AC microgrids. IEEE Trans. Smart Grid 2015, 7, 200–215. [Google Scholar] [CrossRef] [Green Version]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodriguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Cai, H.; Hu, G.; Lewis, F.L.; Davoudi, A. A distributed feedforward approach to cooperative control of AC microgrids. IEEE Trans. Power Syst. 2015, 31, 4057–4067. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; De Vicuña, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2010, 58, 158–172. [Google Scholar] [CrossRef]
- Liang, B.; Kang, L.; He, J.; Zheng, F.; Xia, Y.; Zhang, Z.; Zhang, Z.; Liu, G.; Zhao, Y. Coordination control of hybrid AC/DC microgrid. J. Eng. 2019, 2019, 3264–3269. [Google Scholar] [CrossRef]
- Armghan, H.; Yang, M.; Armghan, A.; Ali, N.; Wang, M.; Ahmad, I. Design of integral terminal sliding mode controller for the hybrid AC/DC microgrids involving renewables and energy storage systems. Int. J. Electr. Power Energy Syst. 2020, 119, 105857. [Google Scholar] [CrossRef]
- Liu, X.; Wang, P.; Loh, P.C. A hybrid AC/DC microgrid and its coordination control. IEEE Trans. Smart Grid 2011, 2, 278–286. [Google Scholar]
- Loh, P.C.; Li, D.; Chai, Y.K.; Blaabjerg, F. Autonomous operation of hybrid microgrid with AC and DC subgrids. IEEE Trans. Power Electron. 2012, 28, 2214–2223. [Google Scholar] [CrossRef]
- Babazadeh, M.; Karimi, H. A robust two-degree-of-freedom control strategy for an islanded microgrid. IEEE Trans. Power Deliv. 2013, 28, 1339–1347. [Google Scholar] [CrossRef]
- Kakigano, H.; Miura, Y.; Ise, T. Distribution voltage control for DC microgrids using fuzzy control and gain-scheduling technique. IEEE Trans. Power Electron. 2012, 28, 2246–2258. [Google Scholar] [CrossRef]
- Vasquez, J.C.; Guerrero, J.M.; Luna, A.; Rodríguez, P.; Teodorescu, R. Adaptive droop control applied to voltage-source inverters operating in grid-connected and islanded modes. IEEE Trans. Ind. Electron. 2009, 56, 4088–4096. [Google Scholar] [CrossRef]
- Li, P.; Guo, T.; Zhou, F.; Yang, J.; Liu, Y. Nonlinear coordinated control of parallel bidirectional power converters in an AC/DC hybrid microgrid. Int. J. Electr. Power Energy Syst. 2020, 122, 106208. [Google Scholar] [CrossRef]
- Ma, T.; Cintuglu, M.H.; Mohammed, O.A. Control of a hybrid AC/DC microgrid involving energy storage and pulsed loads. IEEE Trans. Ind. Appl. 2016, 53, 567–575. [Google Scholar] [CrossRef]
- Tummuru, N.R.; Mishra, M.K.; Srinivas, S. Dynamic energy management of renewable grid integrated hybrid energy storage system. IEEE Trans. Ind. Electron. 2015, 62, 7728–7737. [Google Scholar] [CrossRef]
- Iovine, A.; Siad, S.B.; Damm, G.; De Santis, E.; Di Benedetto, M.D. Nonlinear control of an AC-connected DC MicroGrid. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 4193–4198. [Google Scholar]
- Armghan, H.; Yang, M.; Armghan, A.; Ali, N. Double integral action based sliding mode controller design for the back-to-back converters in grid-connected hybrid wind-PV system. Int. J. Electr. Power Energy Syst. 2021, 127, 106655. [Google Scholar] [CrossRef]
- Cook, M.D.; Parker, G.G.; Robinett, R.D.; Weaver, W.W. Decentralized mode-adaptive guidance and control for DC microgrid. IEEE Trans. Power Deliv. 2016, 32, 263–271. [Google Scholar] [CrossRef]
- Armghan, A.; Azeem, M.K.; Armghan, H.; Yang, M.; Alenezi, F.; Hassan, M. Dynamical Operation Based Robust Nonlinear Control of DC Microgrid Considering Renewable Energy Integration. Energies 2021, 14, 3988. [Google Scholar] [CrossRef]
- Hassan, M.; Paracha, Z.J.; Armghan, H.; Ali, N.; Said, H.A.; Farooq, U.; Afzal, A.; Hassan, M.A.S. Lyapunov based adaptive controller for power converters used in hybrid energy storage systems. Sustain. Energy Technol. Assess. 2020, 42, 100853. [Google Scholar]
- Iovine, A.; Carrizosa, M.J.; Damm, G.; Alou, P. Nonlinear control for DC microgrids enabling efficient renewable power integration and ancillary services for AC grids. IEEE Trans. Power Syst. 2018, 34, 5136–5146. [Google Scholar] [CrossRef]
- Abdullah, M.A.; Yatim, A.; Tan, C.W.; Saidur, R. A review of maximum power point tracking algorithms for wind energy systems. Renew. Sustain. Energy Rev. 2012, 16, 3220–3227. [Google Scholar] [CrossRef]
- Armghan, H.; Ahmad, I.; Armghan, A.; Khan, S.; Arsalan, M. Backstepping based non-linear control for maximum power point tracking in photovoltaic system. Sol. Energy 2018, 159, 134–141. [Google Scholar]
- Han, Y.; Ma, R.; Cui, J. Adaptive higher-order sliding mode control for islanding and grid-connected operation of a microgrid. Energies 2018, 11, 1459. [Google Scholar] [CrossRef] [Green Version]
- Obeid, H.; Fridman, L.M.; Laghrouche, S.; Harmouche, M. Barrier function-based adaptive sliding mode control. Automatica 2018, 93, 540–544. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Irradiance (W/m) | Temperature (°C) | V (V) |
|---|---|---|
| 640 | 21 | 294 |
| 700 | 26 | 286 |
| 800 | 31.6 | 281 |
| 900 | 37.4 | 270 |
| 1000 | 42 | 266 |
| 855 | 36 | 273 |
| 740 | 33 | 278 |
| 615 | 30 | 281 |
| 515 | 27.2 | 287 |
| 445 | 25 | 288 |
| PV Parameters | |
|---|---|
| Photo Voltaic module | 10 per string |
| Parallel linked strings | 1 |
| Cells per module | 60 |
| OC voltage | 363 V |
| SC Current | 7.84 A |
| Maximum power point voltage () | 290 V |
| Maximum power point current () | 7.35 A |
| Nominal power ouptput capacity | 2.1 kW |
| Wind System Parameters | |
| Air density | 1.225 kg/m |
| Wind speed | 5 m/s |
| Rotor diameter | 5.5 m |
| 7.5 | |
| 0.43 | |
| PMSG | |
| Rated power | 3 kW |
| Stator resistance | 0.036 ohm |
| Stator d-axis inductance | 0.334 mH |
| Stator q-axis inductance | 0.217 mh |
| Number of pole pairs | 4 |
| Flux linkage | 0.192 Wb |
| Moment of inertia | 0.011 kg m |
| Viscos damping | 0.001889 N ms |
| Parameter | Value |
|---|---|
| Battery type | Lithium-Ion (Li-Ion) |
| Voltage | 190–540 V |
| Rated current capacity | 33.9 Ah |
| Maximum charge current | 17.5 A |
| Maximum discharge current | 30 A |
| Circuit Parameters | |
|---|---|
| 20 mH, 20 mH, 3.3 mH, | |
| 16 uF, 68 uF, 16 uF, 68 uF, | |
| Switching Frequency | 100 kHz |
| Control System (BFASMC) | |
| 10,000, 10,000, 30,000,8500, 10,000, 10,000, 3500, 15,000 | |
| 1000 to 3000 | |
| 2000 | |
| SMC | |
| 1500, 1000, 2000,500,1500 | |
| 2000 | |
| Lyapunov Controller | |
| 1000, 2000, 1000, 1500, 2500 | |
| 2000 | |
| PID | |
| 10,130,28 | |
| Mode | Controllers | Rise Time (s) | Settling Time (s) | Overshoot (%) | Steady State Error (SSE)% |
|---|---|---|---|---|---|
| Lyapunov | 0.05 | 0.5 | 2.1 | 0.2 | |
| Islanded | PID | 0.5 | 0.6 | 15 | 0.2 |
| SMC | 0.035 | 0.051 | 4.7 | 0.5 | |
| BFASMC | 0.0025 | 0.03 | 0.1 | 0.03 | |
| Grid-Connected | Lyapunov | 0.5 | 0.2 | 0.29 | Nil |
| BFASMC | 0.035 | 0.0003 | 0.1 | Nil | |
| SMC | 0.3 | 0.001 | 5 | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Armghan, A.; Hassan, M.; Armghan, H.; Yang, M.; Alenezi, F.; Azeem, M.K.; Ali, N. Barrier Function Based Adaptive Sliding Mode Controller for a Hybrid AC/DC Microgrid Involving Multiple Renewables. Appl. Sci. 2021, 11, 8672. https://doi.org/10.3390/app11188672
Armghan A, Hassan M, Armghan H, Yang M, Alenezi F, Azeem MK, Ali N. Barrier Function Based Adaptive Sliding Mode Controller for a Hybrid AC/DC Microgrid Involving Multiple Renewables. Applied Sciences. 2021; 11(18):8672. https://doi.org/10.3390/app11188672
Chicago/Turabian StyleArmghan, Ammar, Mudasser Hassan, Hammad Armghan, Ming Yang, Fayadh Alenezi, Muhammad Kashif Azeem, and Naghmash Ali. 2021. "Barrier Function Based Adaptive Sliding Mode Controller for a Hybrid AC/DC Microgrid Involving Multiple Renewables" Applied Sciences 11, no. 18: 8672. https://doi.org/10.3390/app11188672
APA StyleArmghan, A., Hassan, M., Armghan, H., Yang, M., Alenezi, F., Azeem, M. K., & Ali, N. (2021). Barrier Function Based Adaptive Sliding Mode Controller for a Hybrid AC/DC Microgrid Involving Multiple Renewables. Applied Sciences, 11(18), 8672. https://doi.org/10.3390/app11188672