
Modeling of Vessel Traffic Flow for Waterway Design–Port of Świnoujście Case Study

 ,
, 
 ,
,  and
and
Abstract
:1. Introduction
2. Methodology
2.1. Methods Used
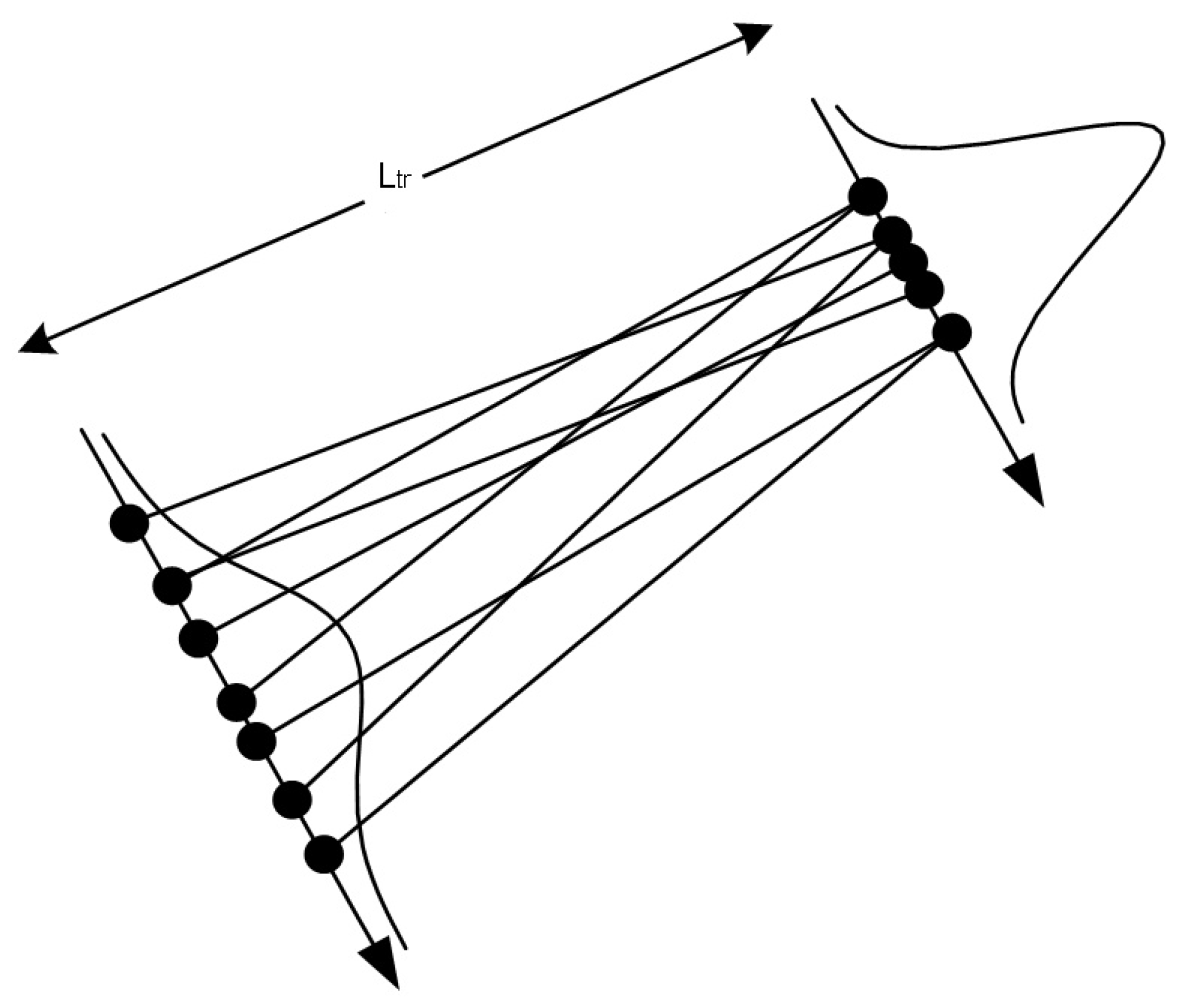
- σtr is the total standard deviation from the mean route due to the route planning, means of ship control, and external factors;
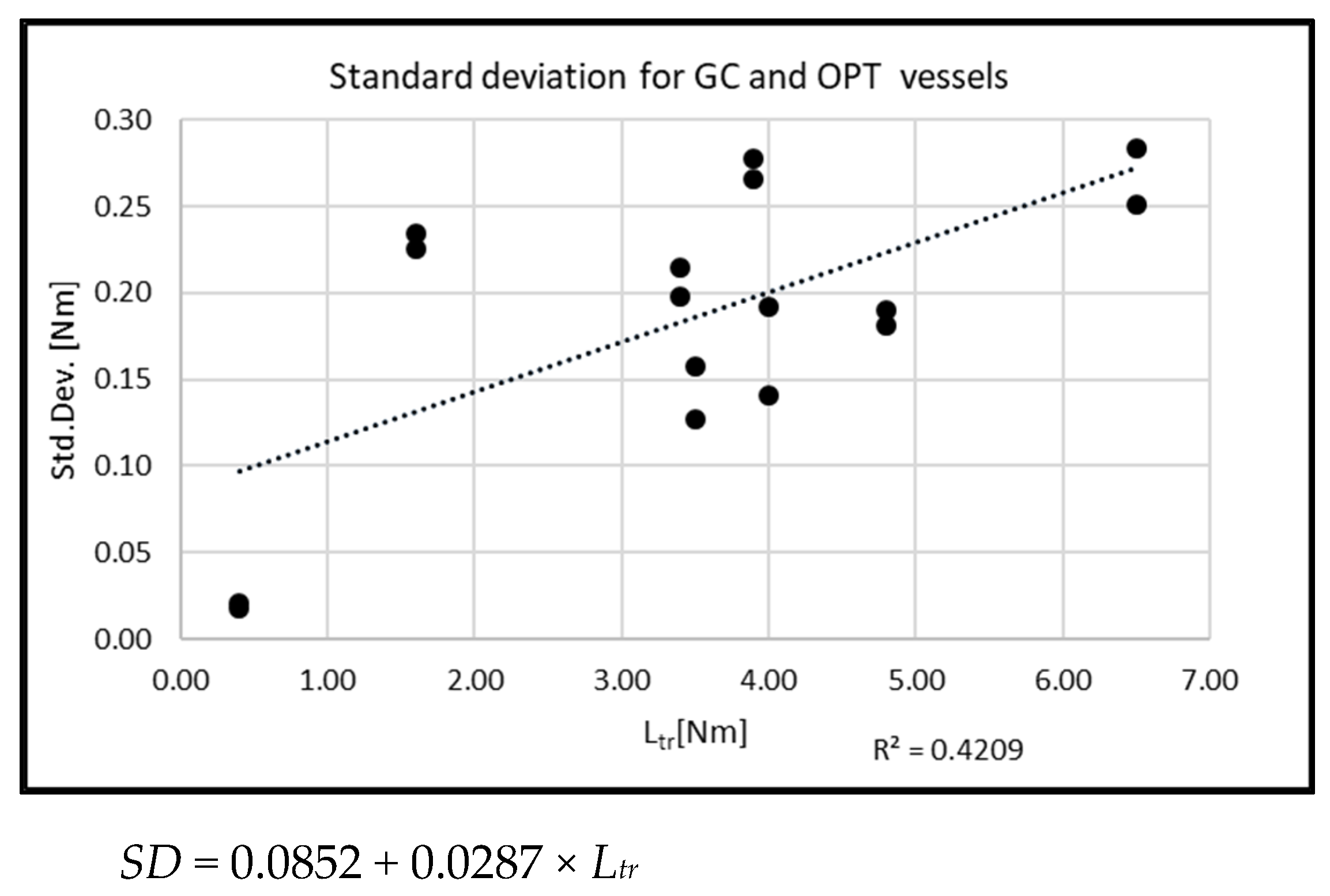
- Ltr is the length of the route (NM).
- Dp is the available width between the bridge piers’
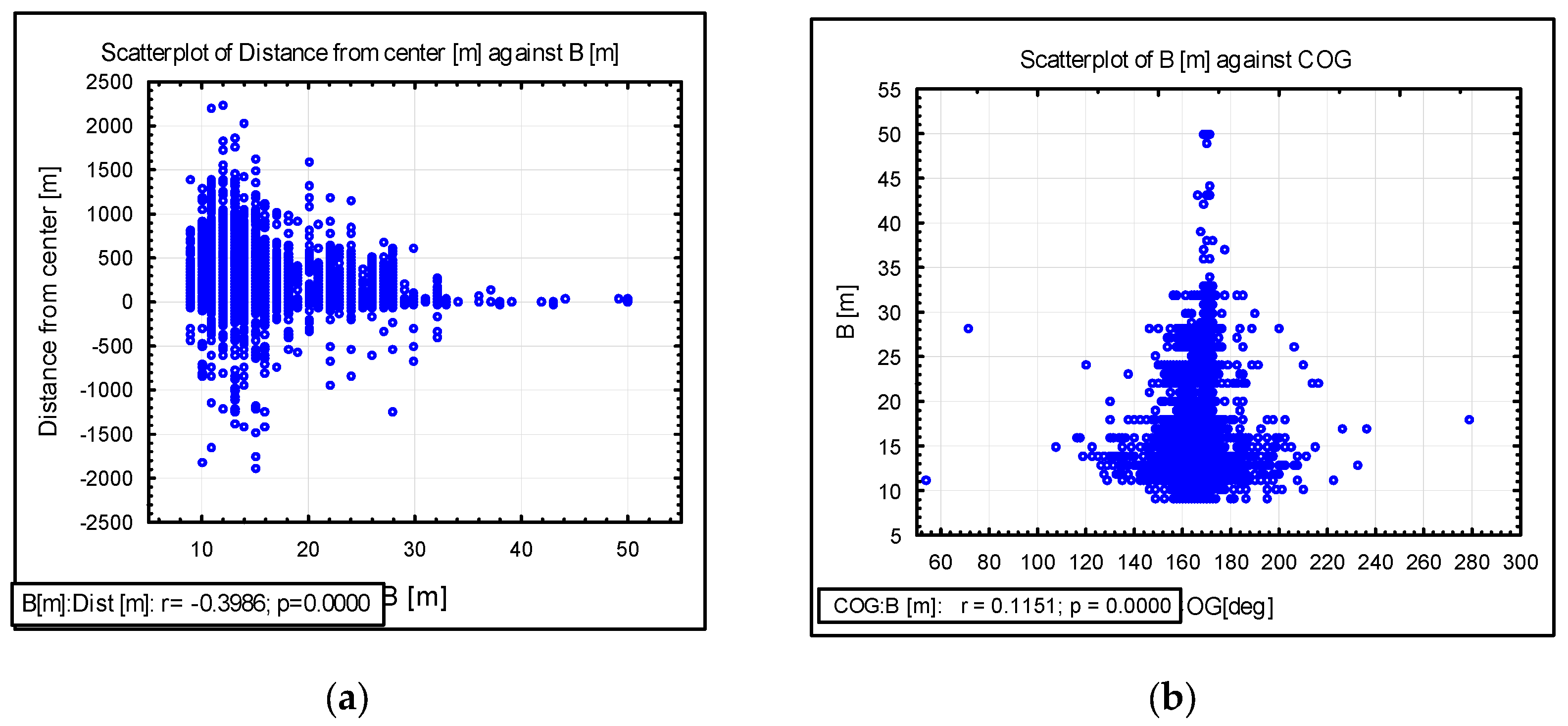
- B is the the breadth of the ship;
- D is the width of the waterway.
- ○
- ls is the distance to stop a ship;
- ○
- D is the available waterway width.
- m, σ are the normal distribution parameters;
- D is the available width of the waterway;
- a is the parameter assumed as 0.2 for canals with central marking and 0.1 without such marking.
- m, σ are the normal distribution parameters;
- L is the length of the ship.
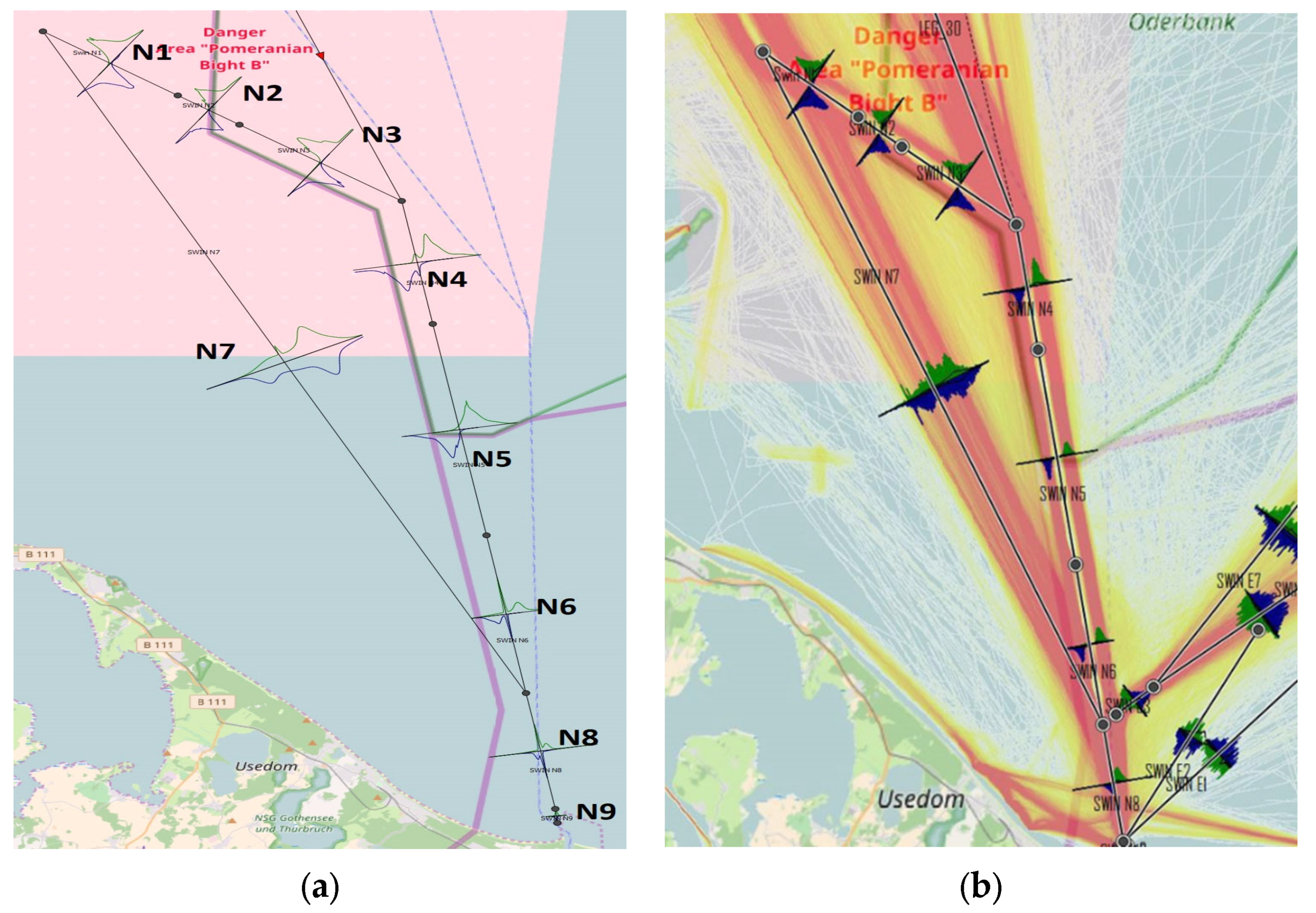
2.2. Analyzed Area
2.3. Data
3. Results
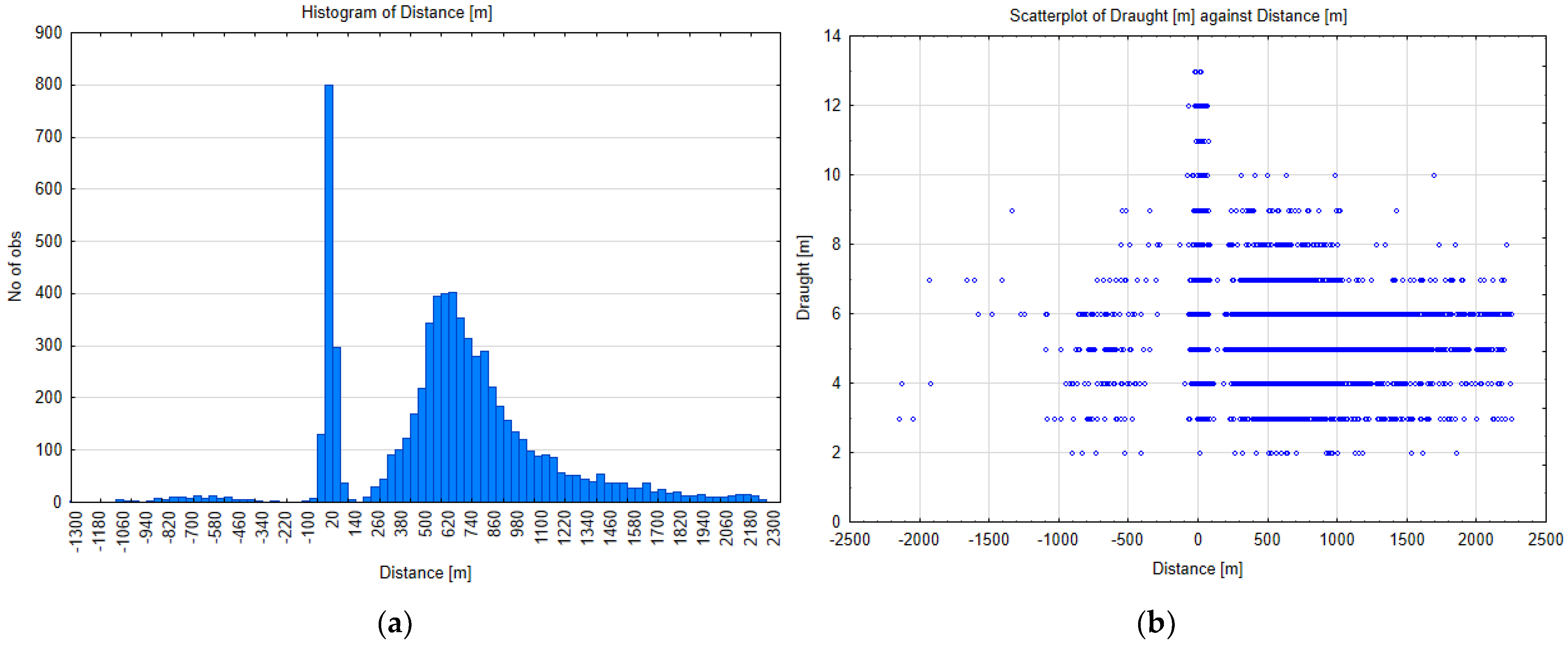
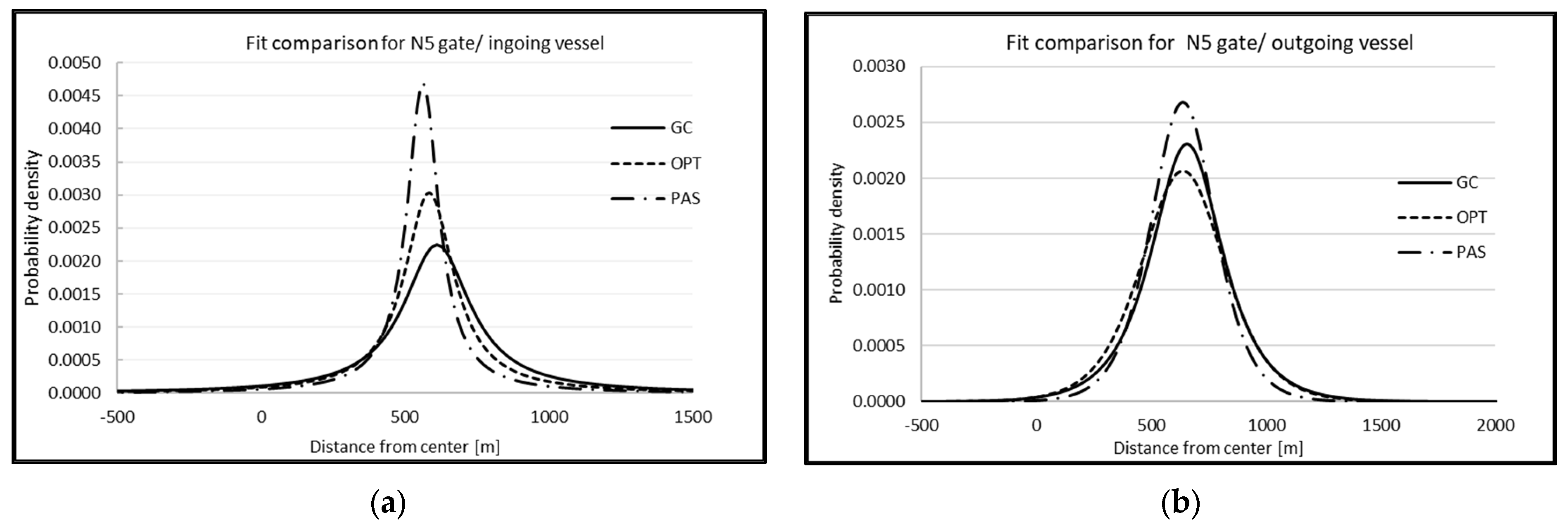
3.1. Ship Spatial Distribution
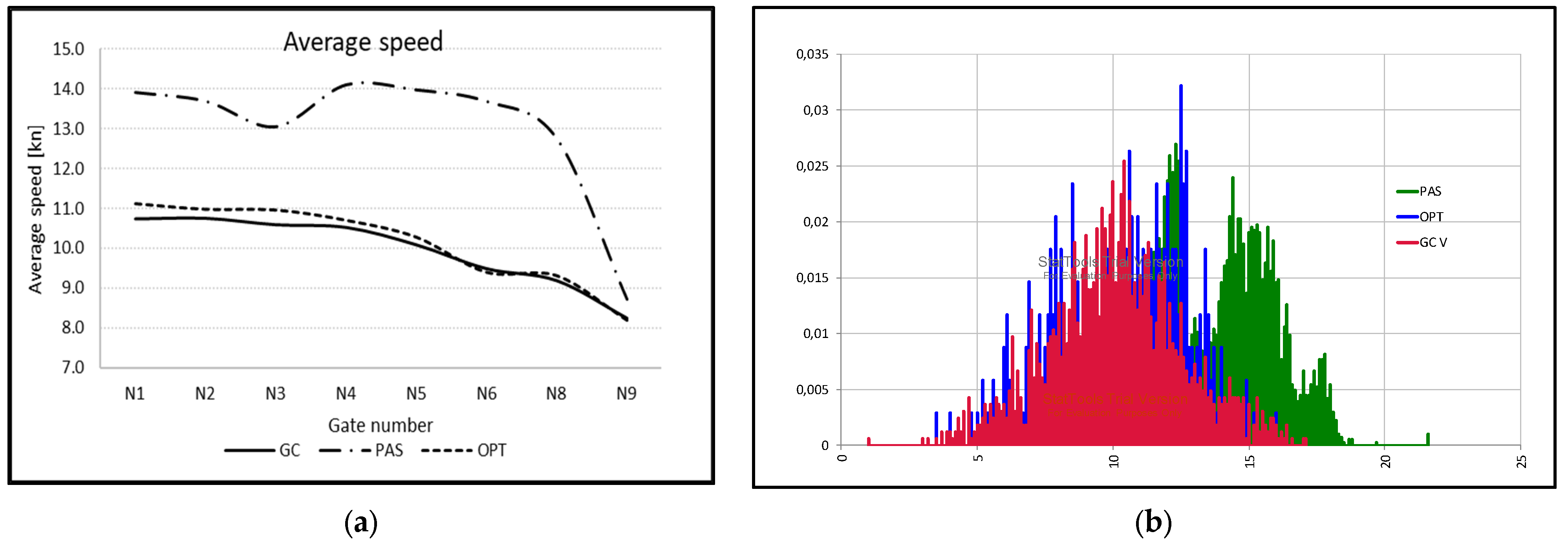
3.2. Average Speed in the Fairway
3.3. Regression Analysis of Traffic Flow Parameters
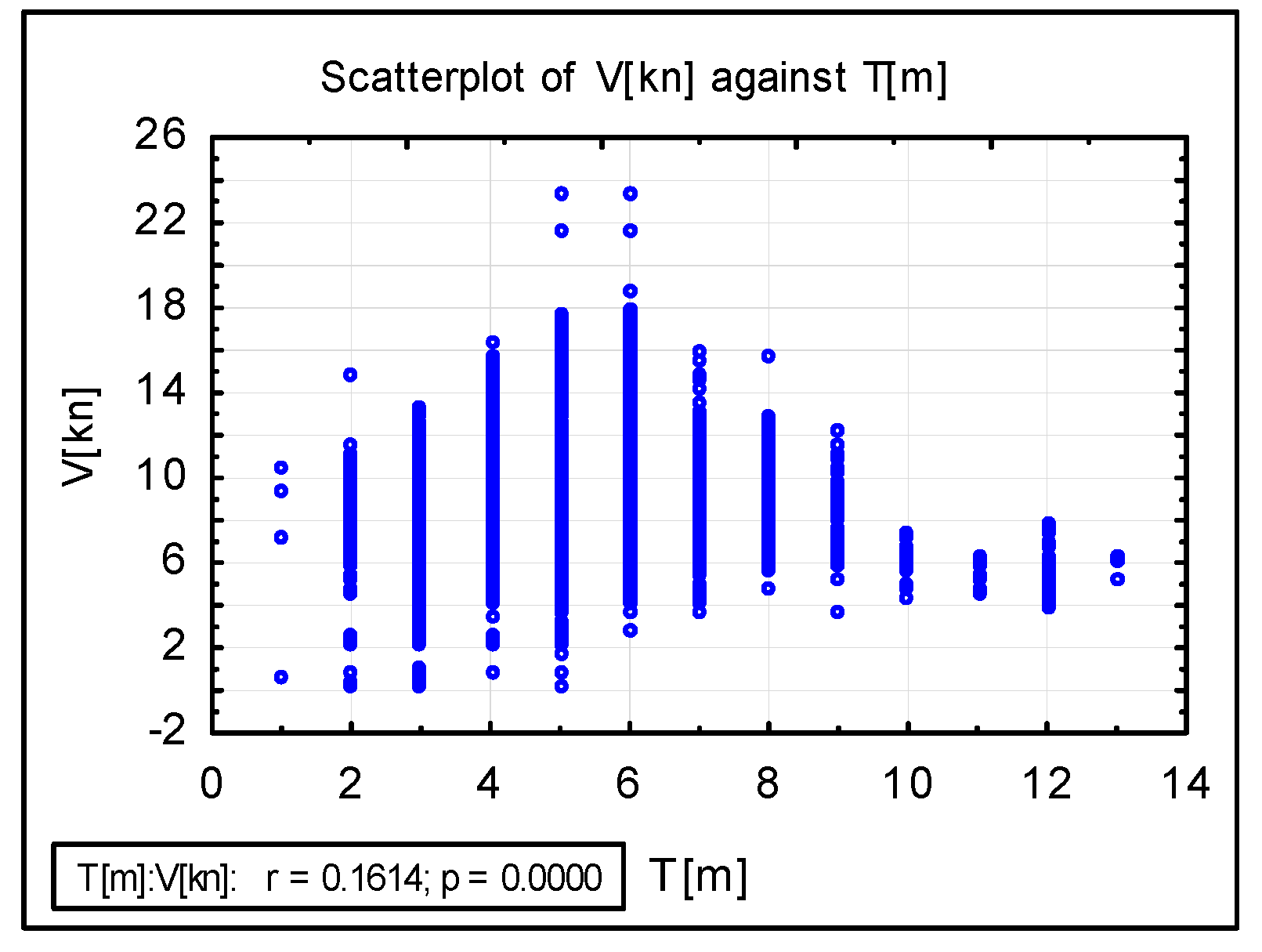
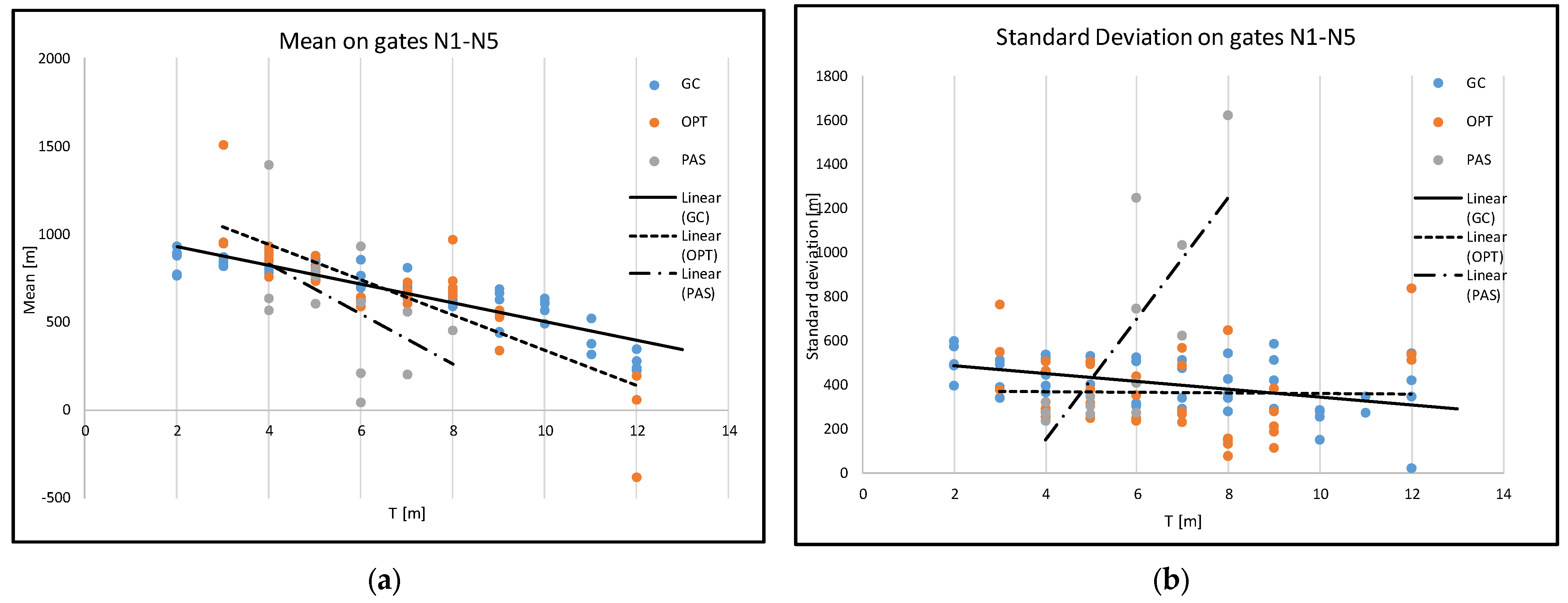
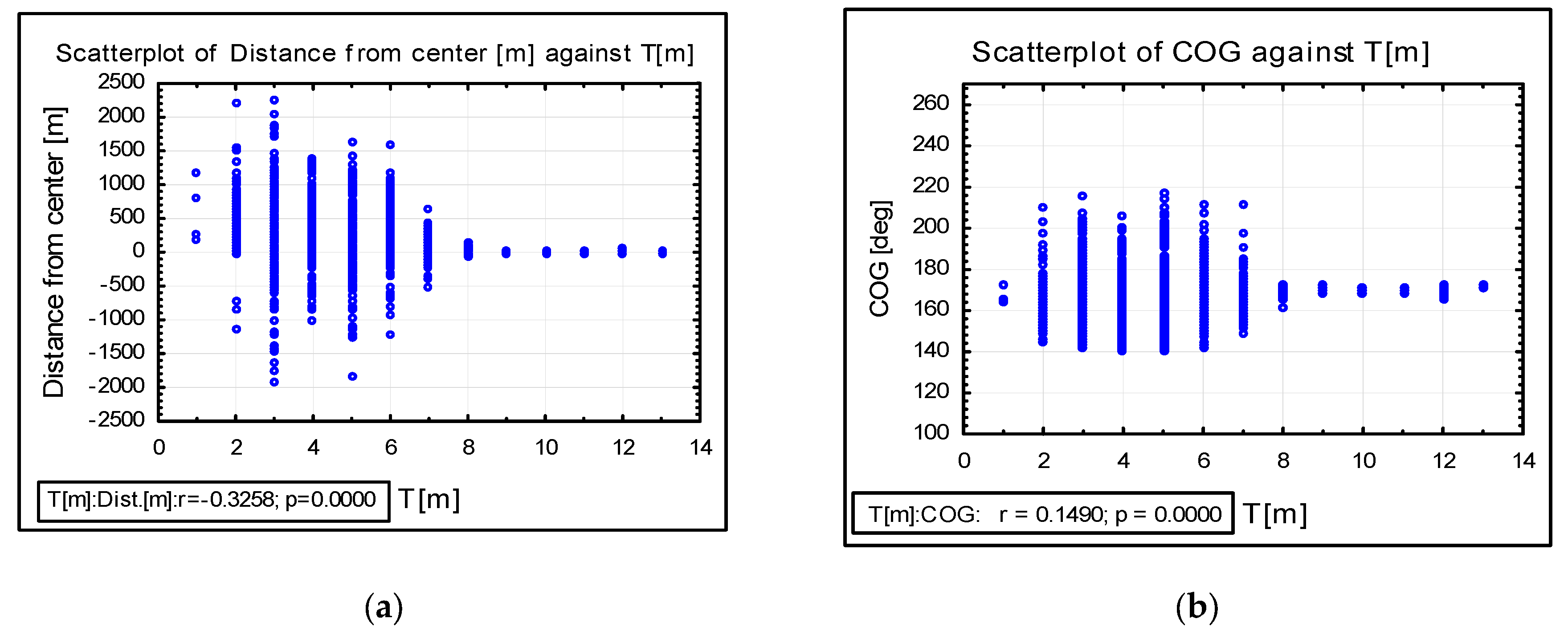
3.3.1. The Model Including Draught T
- H is the the value of Kurskal–Wallis test;
- ;
- N is the number of all observations;
- k is the number of compared groups;
- is the sample size for (j = 1, 2, …, k);
- is the the rank assigned to the value of the variable, for (i = 1,2, … nj),(j = 1,2, …, k);
- is the adjustment factor for ties, t-number of cases included in tied rank.
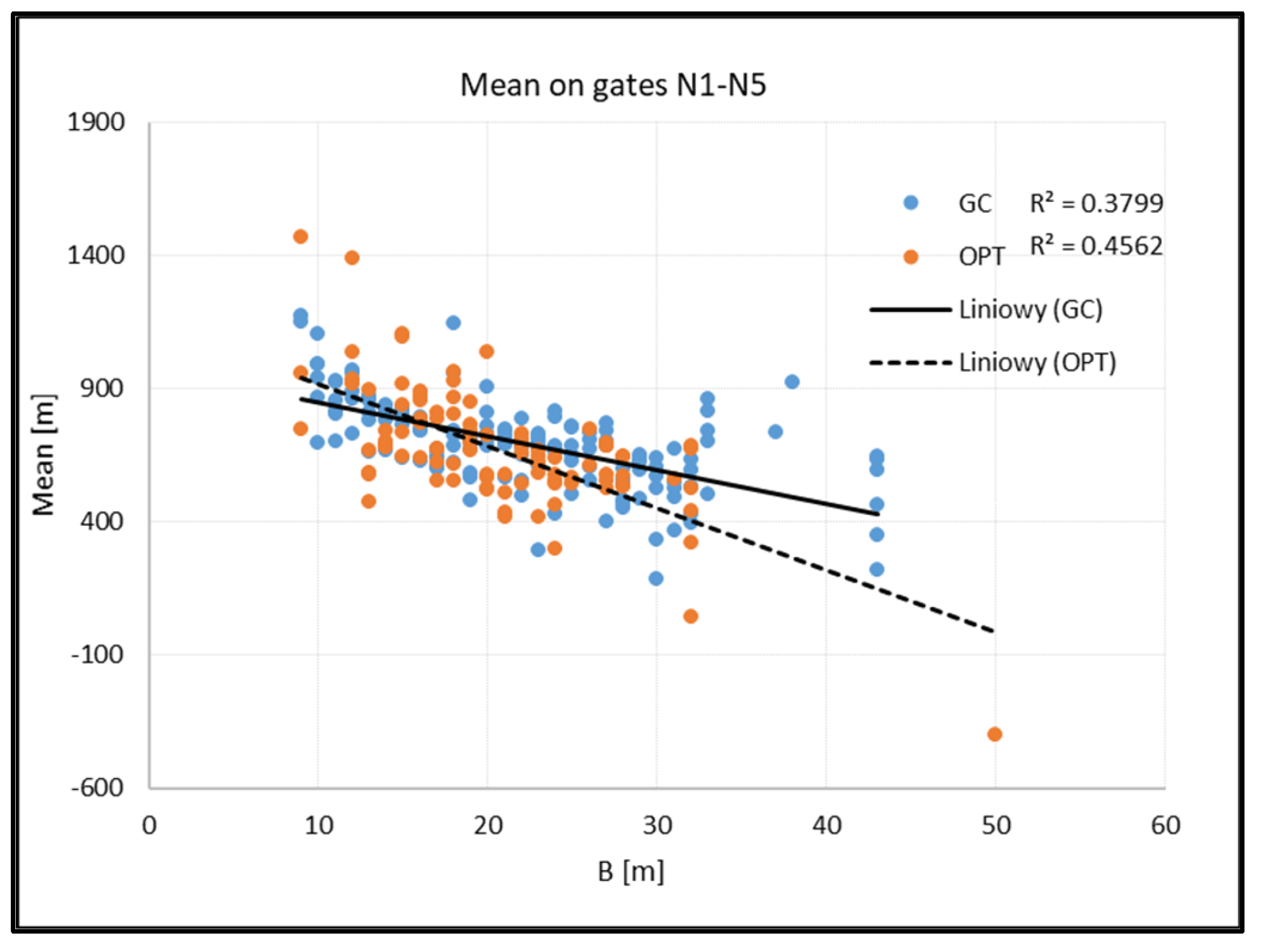
3.3.2. Model Including Width B
3.3.3. Model Including Length of the Leg Ltr
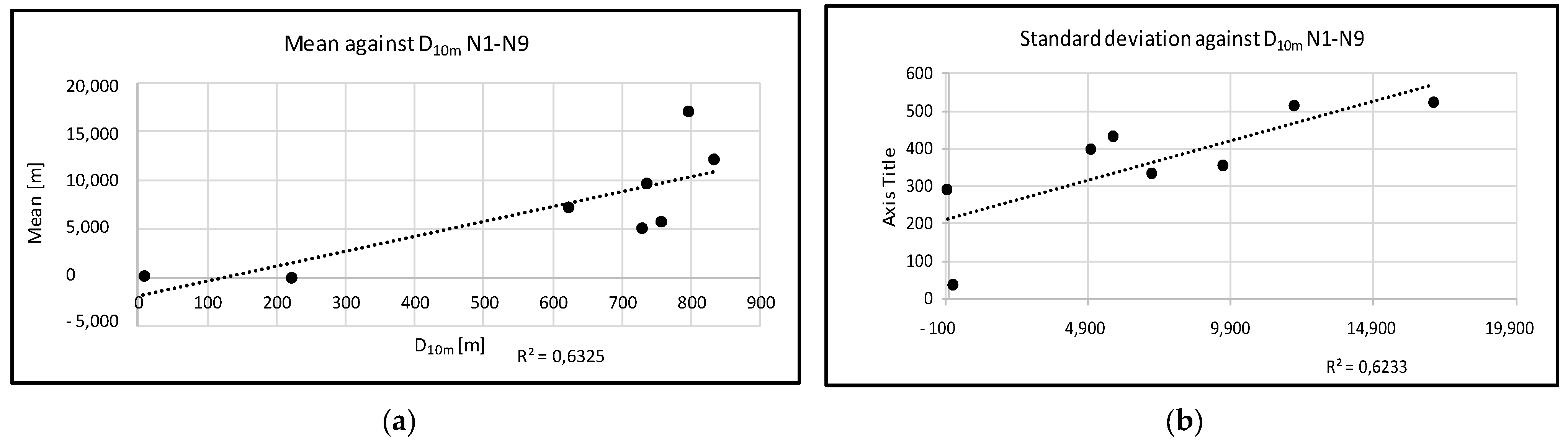
3.3.4. Model Including Distance to Isobaths D10m
3.4. Influence of the Ship’s Draught and Width
4. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AIS | Automatic Identification System |
| BP | Backpropagation |
| GC | General Cargo |
| IALA | International Association of Marine Aids to Navigation and Lighthouse Authorities |
| IWRAP | IALA Waterway Risk Assessment Program |
| OPT | Oil Product Tankers |
| PAS | Passengers vessel |
| RBF | Radial Basis Function |
| SVM | Support Vector Machines |
References
- Fujii, Y.; Yamanouchi, H.; Mizuki, N. Some Factors Affecting the Frequency of Accidents in Marine Traffic. J. Navig. 1974, 27, 239–247. [Google Scholar] [CrossRef]
- MacDuff, T. The Probability of Vessel Collisions. Ocean Ind. 1974, 9, 144–148. [Google Scholar]
- Fujii, Y.; Yamanouchi, H.; Tanaka, K.; Yamada, K.; Okuyama, Y.; Hirano, S. The behaviour of ships in limited waters. Electron. Navig. Res. Inst. Pap. 1978, 19, 1–14. [Google Scholar]
- Iribarren, J.R. PIANC Bulletin No. 100; PIANC: Bruxelles, Belgium, 1999; ISSN 0374-1001. [Google Scholar]
- Haugen, S. Probabilistic Evaluation of Frequency of Collision Between Ships and Offshore Platforms. Doctoral Dissertation, Universytet w Trondheim, Trondheim, Norway, 1999. [Google Scholar]
- Pedersen, P.T. Collision risk for fixed offshore structures close to high-density shipping lanes. J. Eng. Marit. Environ. 2002, 216, 29–44. [Google Scholar] [CrossRef]
- Goerlandt, F.; Kujala, P. Modeling of Ship Collision Probability Using Dynamic Traffic Simulation. Reliability, Risk and Safety; Ale, B., Papazoglou, I., Zio, E., Eds.; Taylor & Francis Group: London, UK, 2010; pp. 440–447. ISBN 978-041560427-7. [Google Scholar]
- Gucma, L.; Perkovic, M.; Przywarty, M. Assessment of influence of traffic intensity increase on collision probability in the Gulf of Trieste. Annu. Navig. 2009, 15, 41–48. Available online: http://yadda.icm.edu.pl/baztech/element/bwmeta1.element.baztech-article-BATA-0011-0020 (accessed on 15 June 2021).
- Montewka, J.; Krata, P.; Goerlandt, F.; Mazaheri, A.; Kujala, P. Marine traffic risk modelling—An innovative approach and a case study. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2011, 225, 307–322. [Google Scholar] [CrossRef]
- Yamaguchi, A.; Sakaki, S. Traffic surveys in Japan. J. Navig. 1971, 24, 521–534. [Google Scholar] [CrossRef]
- Lušić, Z.; Pušić, D.; Medić, D. Analysis of the maritime traffic in the central part of the Adriatic. In Transport Infrastructure and Systems, Proceedings of the AIIT International Congress on Transport Infrastructure and Systems; CRC Press: Rome, Italy, 2017; pp. 1013–1020. ISBN 9781138030091. [Google Scholar]
- Rong, H.; Teixeira, A.; Soares, C.G. Evaluation of near-collisions in the Tagus River Estuary using a marine traffic simulation model. Sci. J. Marit. Univ. Szczec. 2015, 43, 68–78. [Google Scholar]
- Mandal, S.; Nagarajan, V.; Sha, O.P. Navigational safety and traffic pattern analysis using AIS data on the western coast of India. Curr. Sci. 2018, 114, 2473–2481. [Google Scholar] [CrossRef]
- Weng, J.; Meng, Q.; Qu, X. Vessel Collision Frequency Estimation in the Singapore Strait. J. Navig. 2012, 65, 207–221. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Liu, J.; Zhou, X.; Zhao, Z.; Wan, C.; Liu, Z. AIS data-driven approach to estimate navigable capacity of busy waterways focusing on ships entering and leaving port. Ocean Eng. 2020, 218, 108215. [Google Scholar] [CrossRef]
- Xin, X.; Liu, K.; Yang, X.; Yuan, Z.; Zhang, J. A simulation model for ship navigation in the “Xiazhimen” waterway based on statistical analysis of AIS data. Ocean Eng. 2019, 180, 279–289. [Google Scholar] [CrossRef]
- Aydogdu, Y.V.; Yurtoren, C.; Park, J.S.; Park, Y.S. A study on local traffic management to improve marine traffic safety in the Istanbul Strait. J. Navig. 2012, 65, 99–112. [Google Scholar] [CrossRef]
- Altan, Y.C.; Otay, E.N. Maritime Traffic Analysis of the Strait of Istanbul based on AIS data. J. Navig. 2017, 70, 1367–1382. [Google Scholar] [CrossRef]
- Silveira, P.A.M.; Teixeira, A.P.; Guedes Soares, C. Use of AIS Data to Characterise Marine Traffic Patterns and Ship Collision Risk off the Coast of Portugal. J. Navig. 2013, 66, 879–898. [Google Scholar] [CrossRef] [Green Version]
- Yip, T.L. A marine traffic flow model. Int. J. Mar. Navig. Saf. Sea Transp. 2013, 7, 109–113. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.G.; Yin, J.C.; Wang, N.N.; Hui, Z.G. Vessel traffic flow analysis and prediction by an improved PSO-BP mechanism based on AIS data. Evol. Syst. 2019, 10, 397–407. [Google Scholar] [CrossRef]
- Haiyan, W.; Youzhen, W. Vessel traffic flow forecasting with the combined model based on support vector machine. In Proceedings of the 2015 International Conference on Transportation Information and Safety (ICTIS), Wuhan, China, 25–28 June 2015; pp. 695–698. [Google Scholar] [CrossRef]
- Osekowska, E.; Johnson, H.; Carlsson, B. Maritime vessel traffic modeling in the context of concept drift. Transp. Res. Procedia 2017, 25, 1457–1476. [Google Scholar] [CrossRef]
- Li, W.F.; Mei, B.; Shi, G.Y. Automatic recognition of marine traffic flow regions based on Kernel Density Estimation. J. Mar. Sci. Technol. 2018, 26, 84–91. [Google Scholar] [CrossRef]
- Fuji, Y.; Yamanouchi, H. Visual range and the degree of risk. J. Navig. 1974, 27, 248–252. [Google Scholar] [CrossRef]
- Kuroda, K.; Kita, H. Probabilistic- Modeling of Ship Collision with Bridge Piers. In IABSE Colloquium on Ship Collision with Bridges and Offshore Structures; IABSE Colloquium: Copenhagen, Denmark, 1983. [Google Scholar]
- AASHTO. Guide Specification and Commentary for Vessel Collision Design of Highway Bridges. Volume I: Final Report; American Association of State Highway and Transportation Officials (AASHTO): Washington, DC, USA, 2010; ISBN 1560514264/9781560514268. [Google Scholar]
- IALA. The Use of IALA Waterway Risk Assessment Program (IWRAP MKII), IALA Guideline G1123, Edition 1.0. 2017. Available online: https://www.iala-aism.org/product/g1123-use-iala-waterway-risk-assessment-programme-iwrap-mkii/ (accessed on 15 June 2021).
- StatTools. User’s Guide. Version 7, May 2016. Palisade Corporation. Available online: https://www.palisade.com/downloads/documentation/7/EN/StatTools7_EN.pdf (accessed on 19 June 2021).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dependent Variable | Ships Type | Coefficient Intercept | Coefficient T[m] | R2 | F | p |
|---|---|---|---|---|---|---|
| Mean | GC | 1037.7 * | −53.8 * | 0.7993 * | 208.7330 * | 0.0000 * |
| Mean | OPT | 1340.6 * | −100.1 * | 0.6801 * | 72.2755 * | 0.0000 * |
| Mean | PAS | 1367.1 * | −136.8 | 0.2667 | 3.5840 | 0.0849 |
| Std.Dev. | GC | 523.9 * | −18.1 * | 0.2265 * | 14.3461 * | 0.0004 * |
| Std.Dev. | OPT | 372.4 * | −1.2 | 0.0003 | 0.0093 | 0.9238 |
| Std.Dev. | PAS | −663.1 | 224.1 * | 0.6101 * | 17.2121 * | 0.0016 * |
| Dependent Variable | Ships Type | Coefficient Intercept | Coefficient B[m] | R2 | F | p |
|---|---|---|---|---|---|---|
| Mean | GC | 973.2 * | −12.7 * | 0.3799 * | 90.6729 * | 0.0000 * |
| Mean | OPT | 1150.6 * | −23.3 * | 0.4562 * | 83.8872 * | 0.0000 * |
| Mean | PAS | −6.2 | 23.9 | 0.0245 | 0.5532 | 0.4649 |
| Std.Dev. | GC | 398.7 * | −0.7 | 0.0015 | 0.2211 | 0.6389 |
| Std.Dev. | OPT | 304.2 * | 0.1 | 0.0000 | 0.0013 | 0.9715 |
| Std.Dev. | PAS | 0.8 | 42.3 | 0.0000 | 0.0003 | 0.9857 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nowy, A.; Łazuga, K.; Gucma, L.; Androjna, A.; Perkovič, M.; Srše, J. Modeling of Vessel Traffic Flow for Waterway Design–Port of Świnoujście Case Study. Appl. Sci. 2021, 11, 8126. https://doi.org/10.3390/app11178126
Nowy A, Łazuga K, Gucma L, Androjna A, Perkovič M, Srše J. Modeling of Vessel Traffic Flow for Waterway Design–Port of Świnoujście Case Study. Applied Sciences. 2021; 11(17):8126. https://doi.org/10.3390/app11178126
Chicago/Turabian StyleNowy, Agnieszka, Kinga Łazuga, Lucjan Gucma, Andrej Androjna, Marko Perkovič, and Jure Srše. 2021. "Modeling of Vessel Traffic Flow for Waterway Design–Port of Świnoujście Case Study" Applied Sciences 11, no. 17: 8126. https://doi.org/10.3390/app11178126
APA StyleNowy, A., Łazuga, K., Gucma, L., Androjna, A., Perkovič, M., & Srše, J. (2021). Modeling of Vessel Traffic Flow for Waterway Design–Port of Świnoujście Case Study. Applied Sciences, 11(17), 8126. https://doi.org/10.3390/app11178126