
Advanced Trajectory Control for Piezoelectric Actuators Based on Robust Control Combined with Artificial Neural Networks



Abstract
:1. Introduction
2. Materials Furthermore, Methods
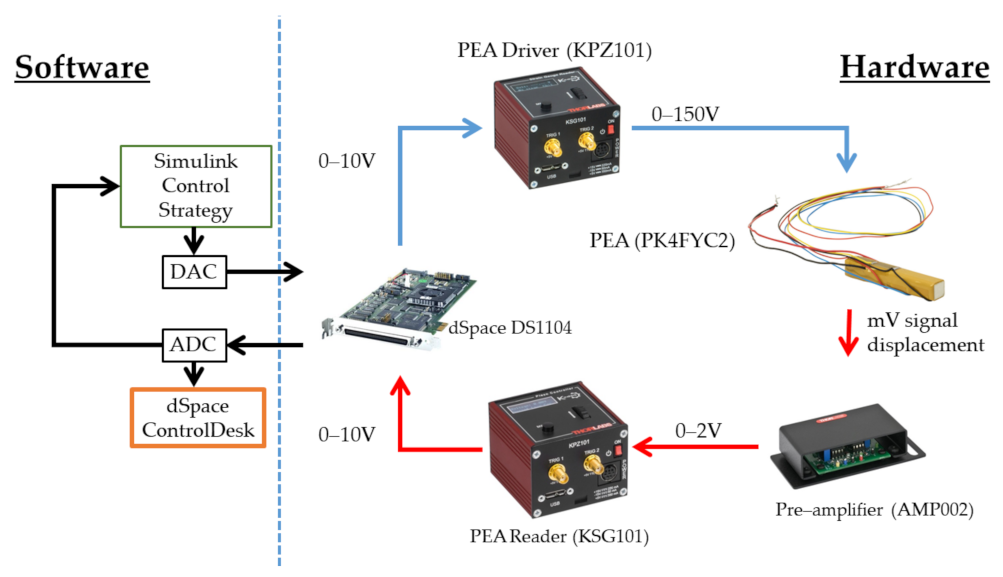
2.1. Hardware Description
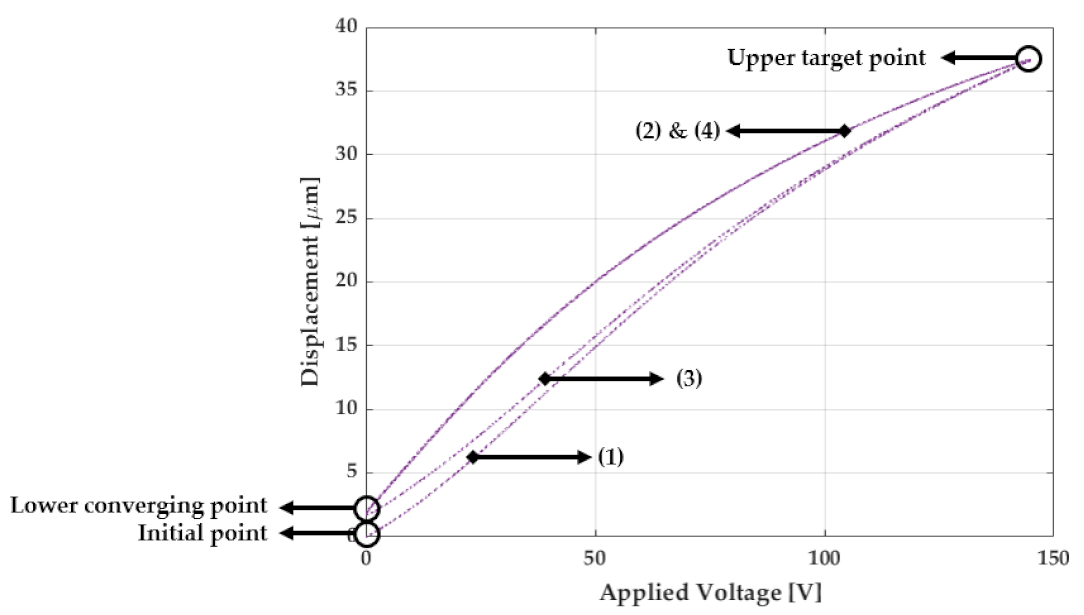
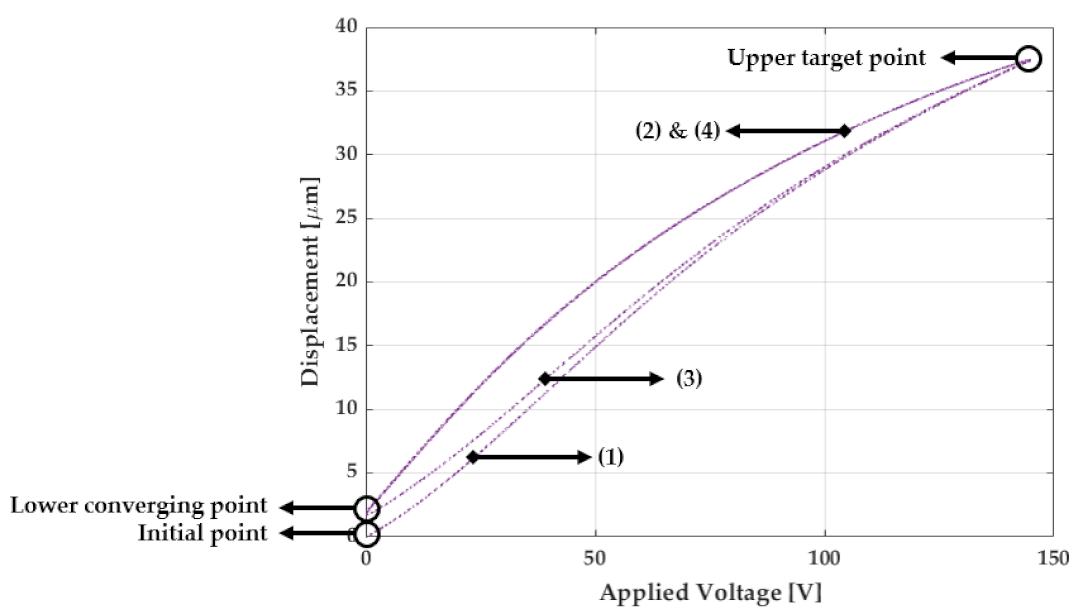
2.2. Hysteresis Description and Reference Design
- Initial point: We calibrated the PEA so that it initially starts at a zero displacement from this.
- Curve (1): This is known as the initial ascending curve, which begins from the previously described point and ends at the upper target point. As the figure shows, the non-linearity is present along this path.
- Upper target point: At this place, the PEA reached the correspondent displacement to the specified amplitude of the triangular waveform.
- Curve (2): This, known as the second ascending curve, shows that the PEA has an asymmetric hysteresis, which is a phenomenon that creates difficulties when mathematical models need to be found to reflex.
- Lower converging point: Ideally, the final position could have been at the initial point when the applied voltage is null. However, in this case, the lower converging point is not the same as the initial point.
- Curve (3): Provided that amplitude and period are the same along the experiment, then this curve will be equal for the following ascending cycles.
- Curve (4): As with the curve (3), this course will be the same provided that the reference configuration is constant.
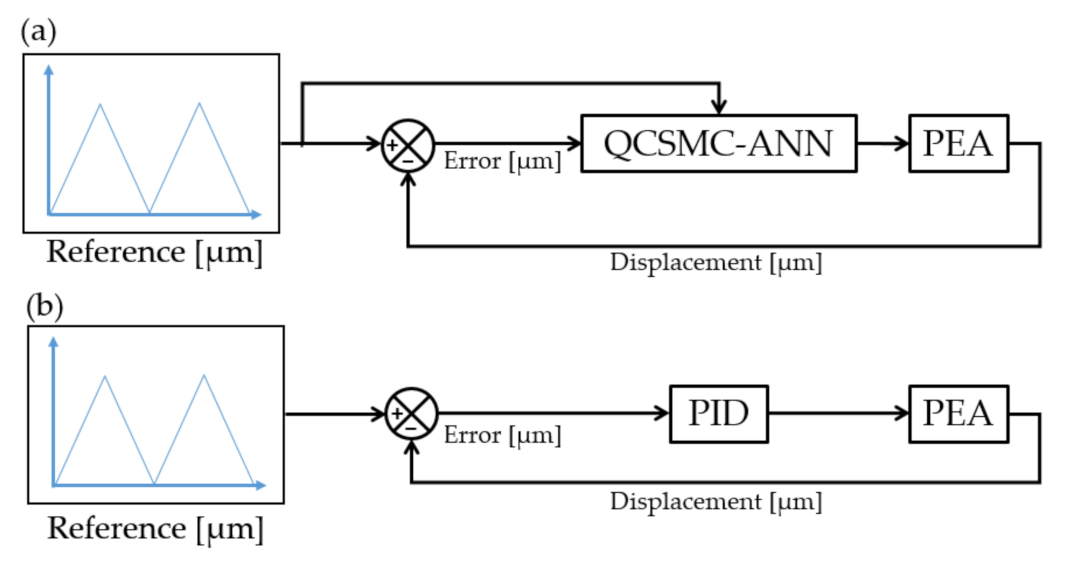
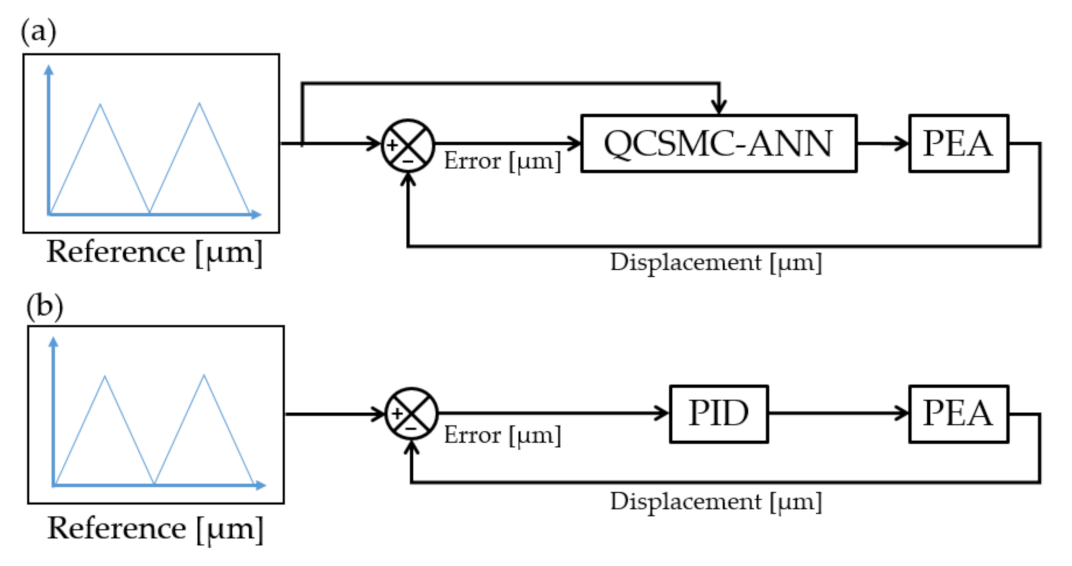
2.3. Contrasted Schemes and Their Design
2.4. Quasi-Continuous Sliding Mode Control
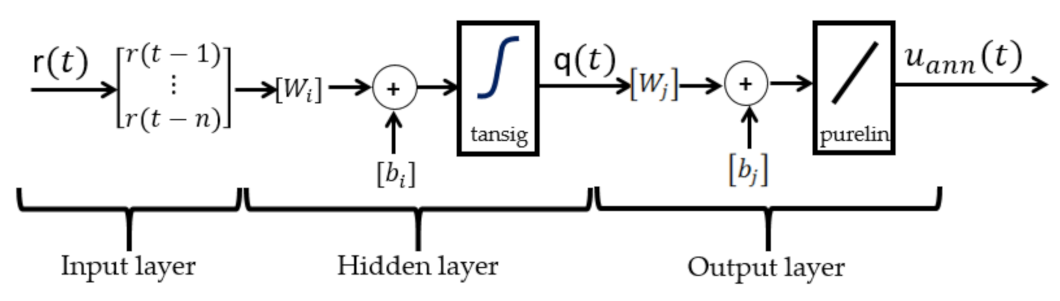
Neural Network Compensation Design
2.5. PID Control
3. Results
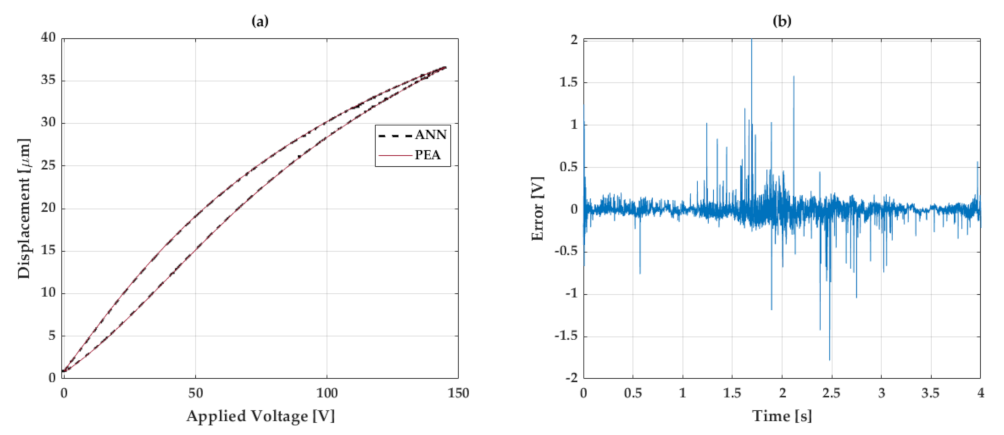
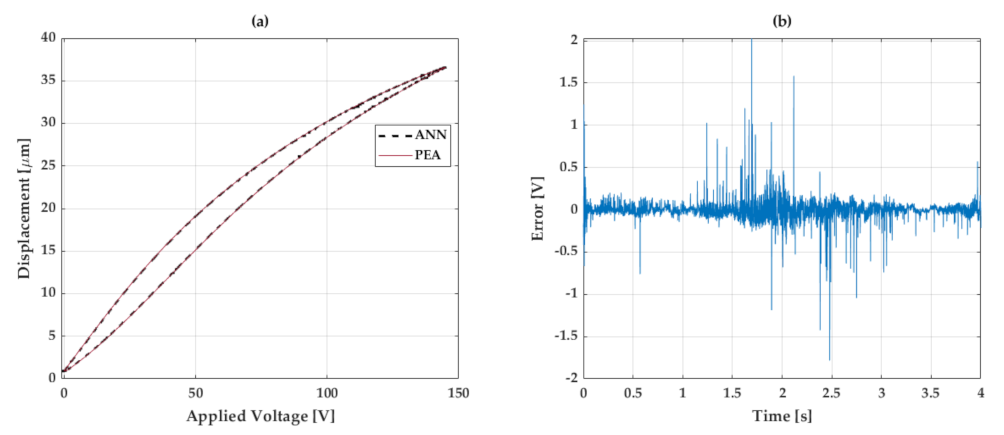
3.1. ANN Analysis Results
3.2. Reference Tracking Results
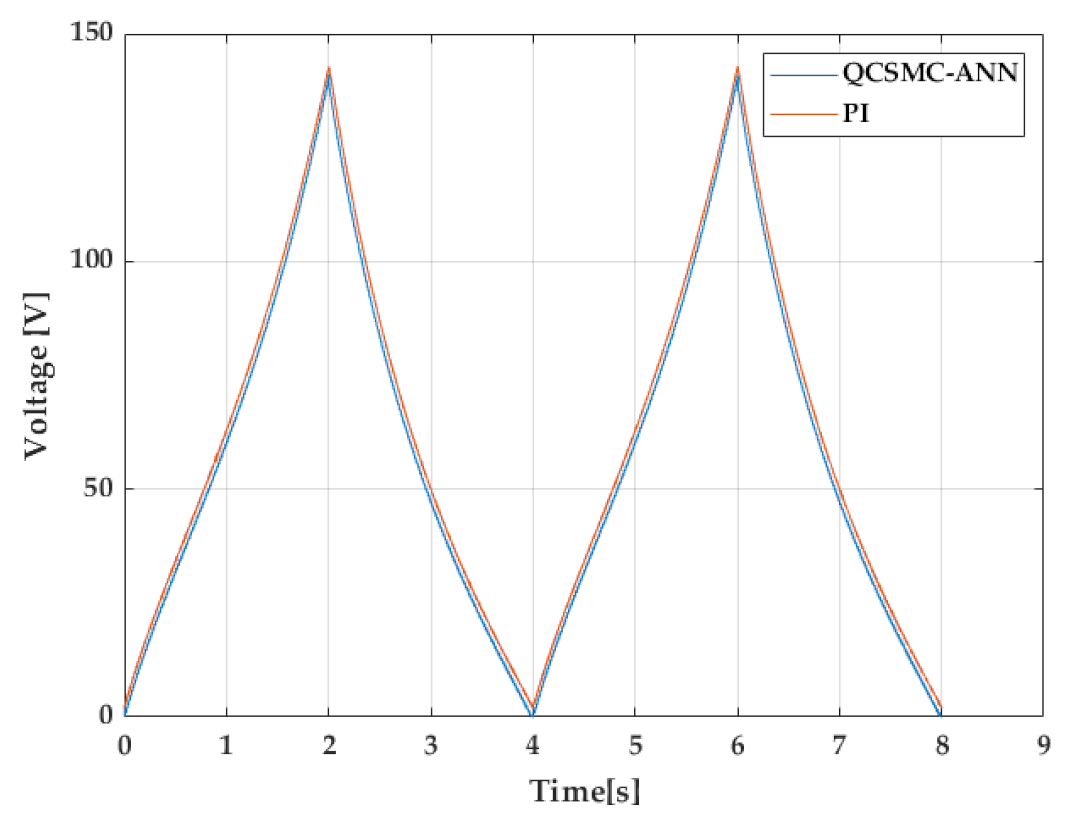
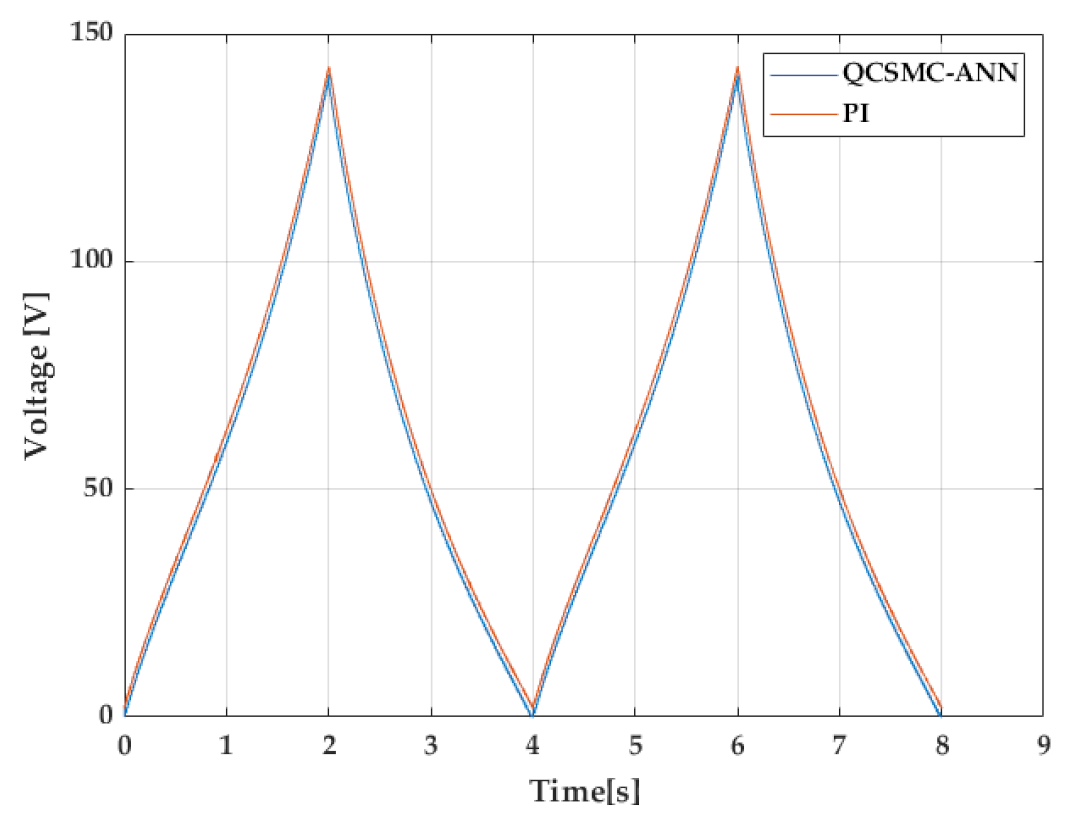
3.3. Triangular Tracking Results
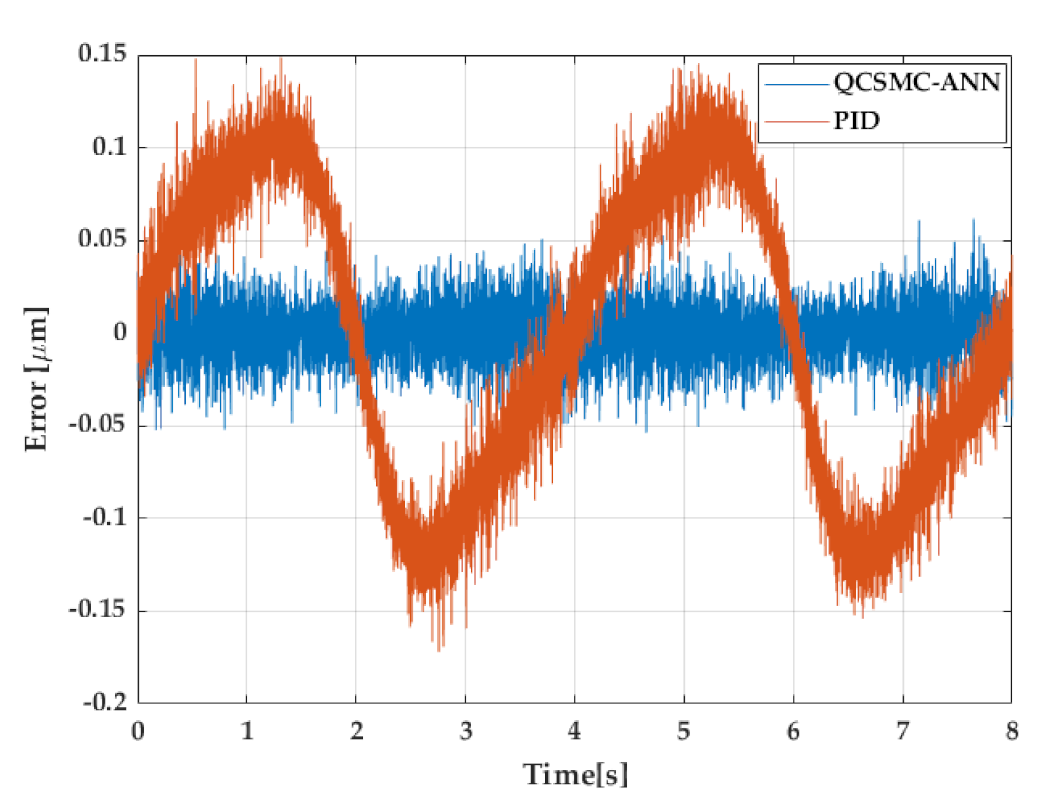
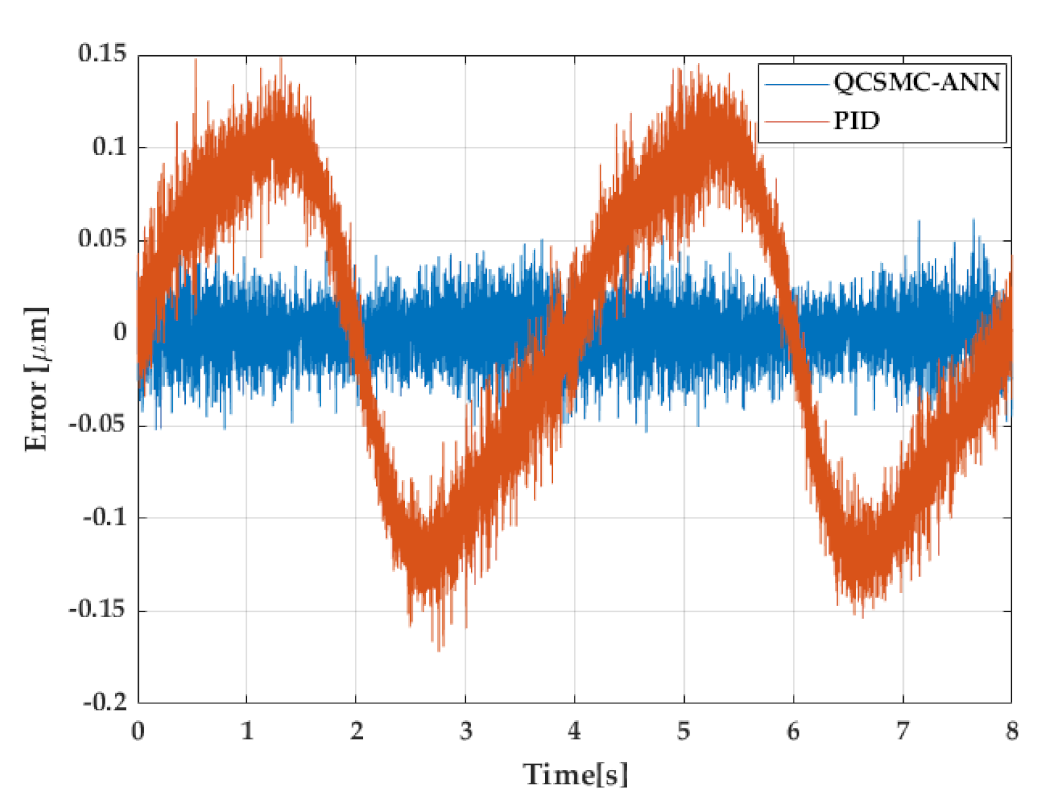
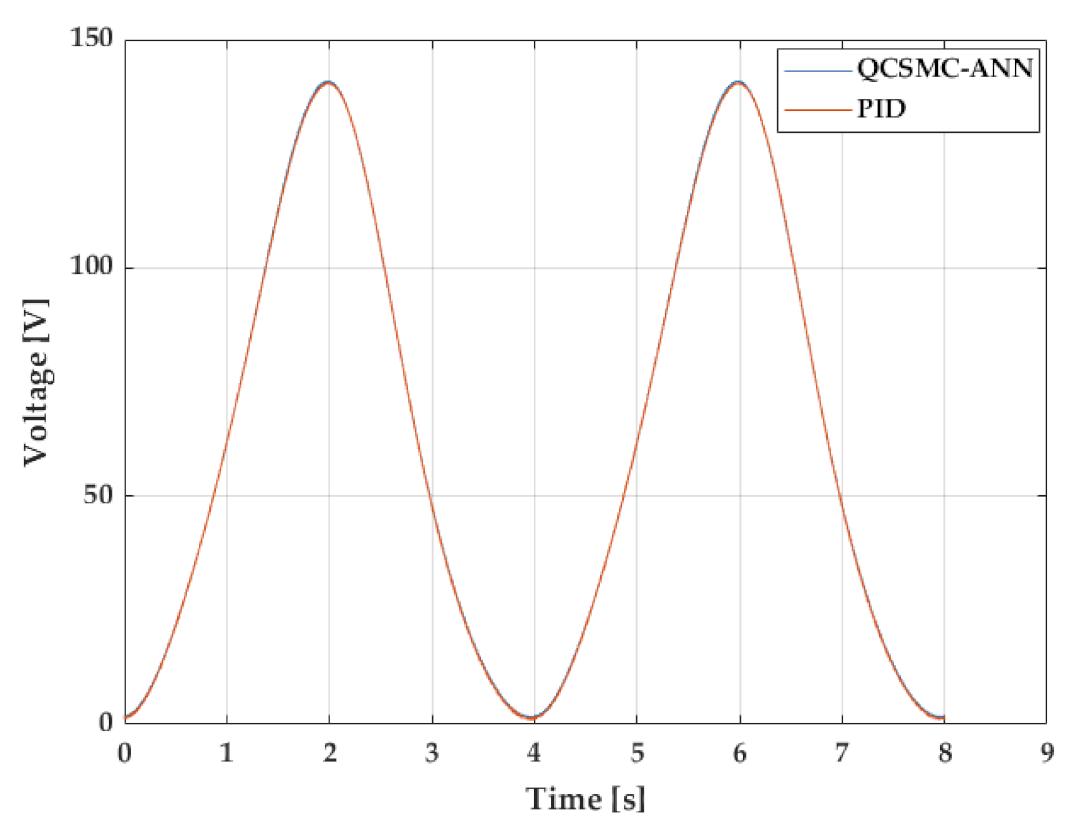
3.4. Sinusoidal Tracking Results
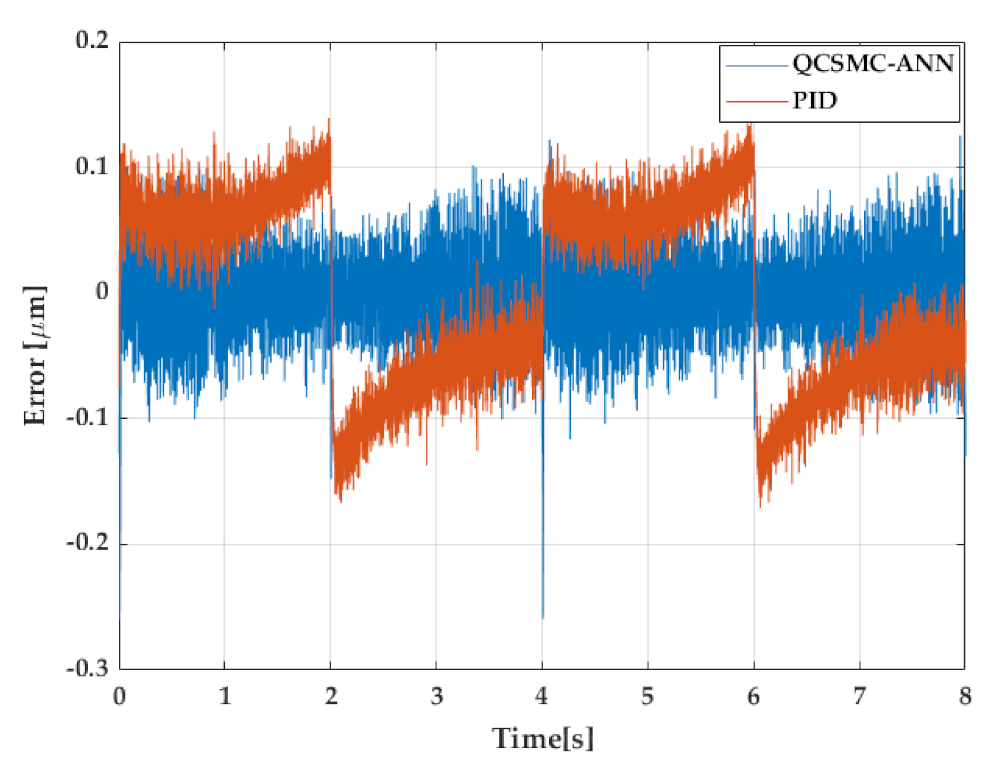
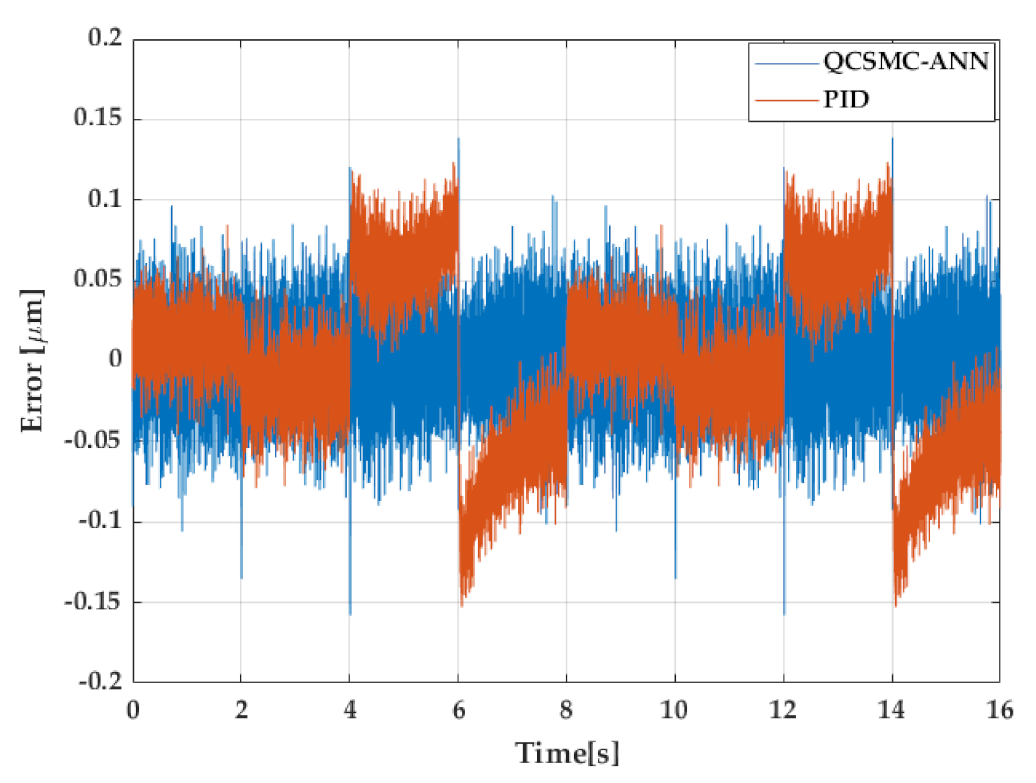
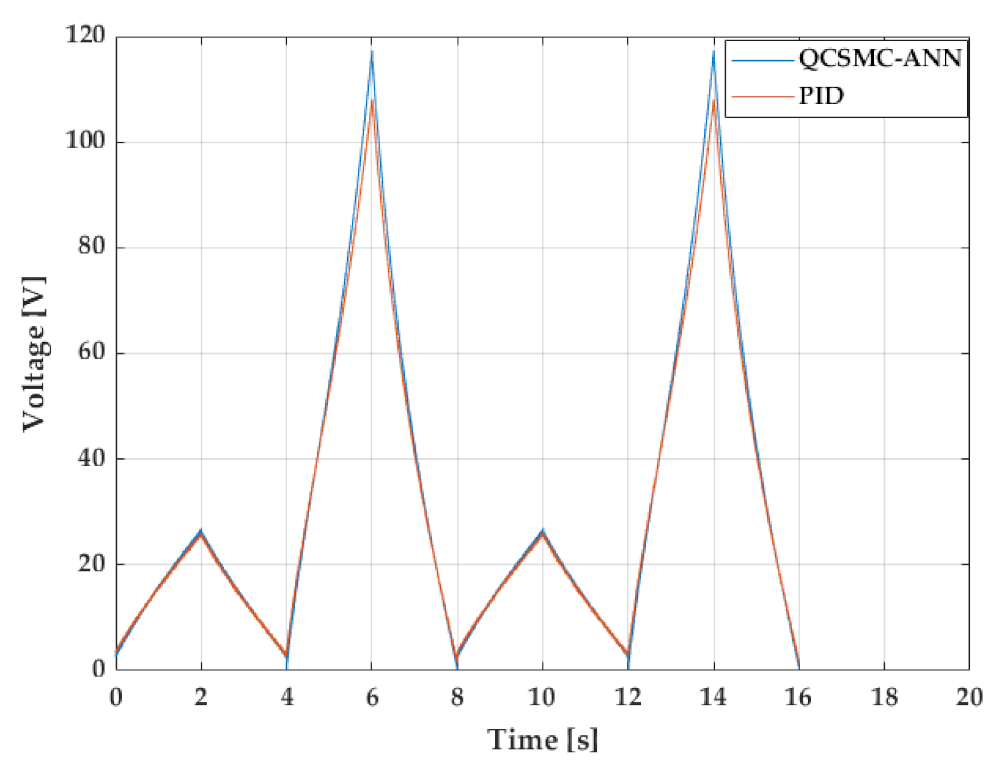
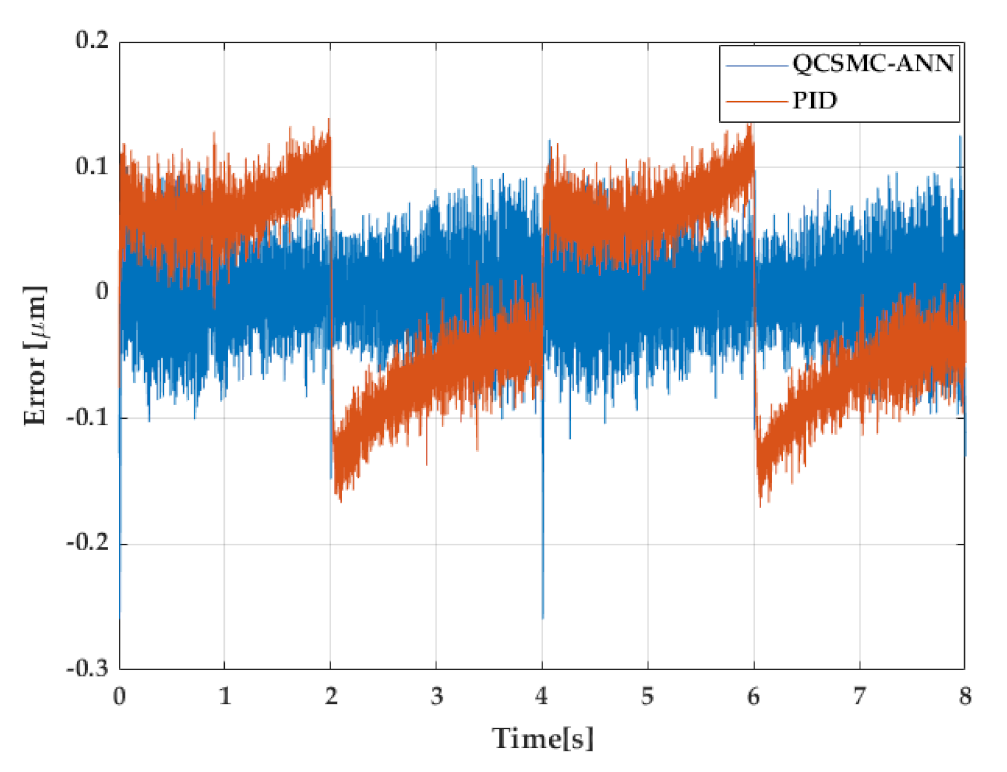
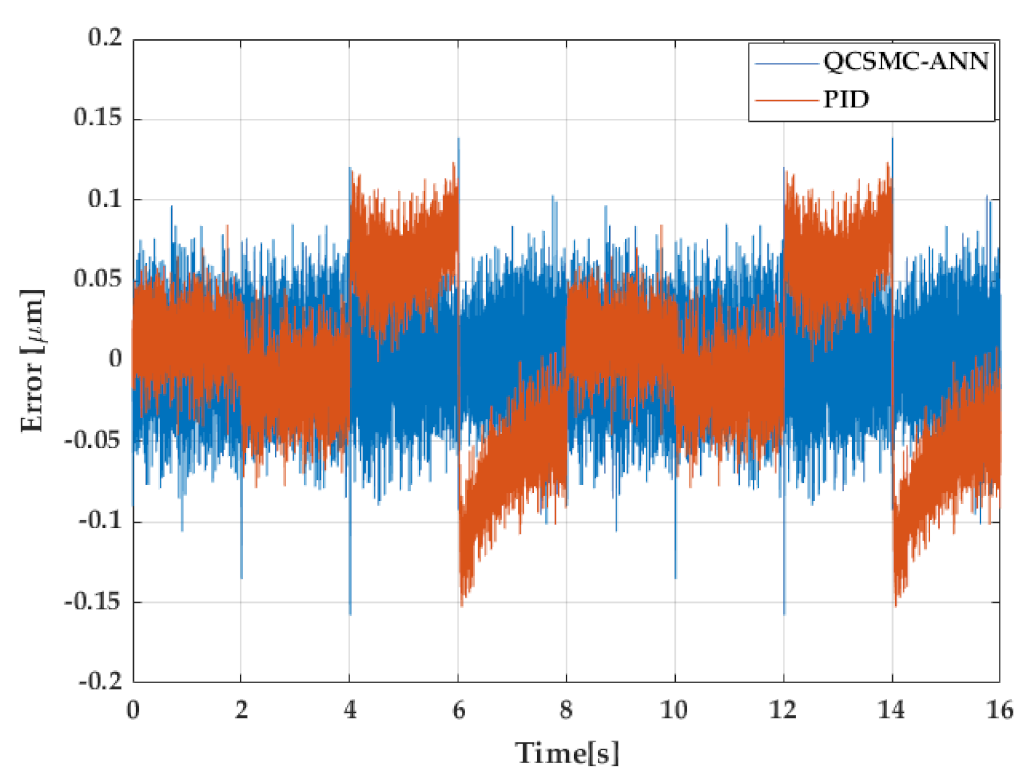
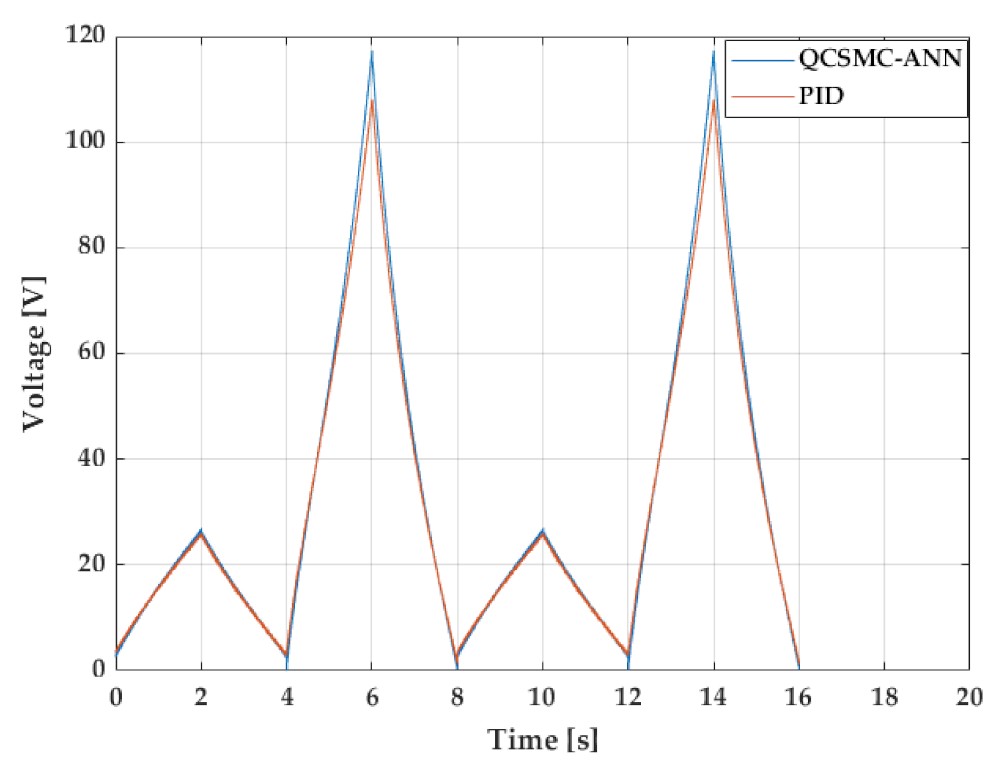
3.5. Triangular Tracking Results with Variable Amplitude
3.6. Metrics Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PEA | Piezoelectric actuator |
| PID | Proportional-integral-derivative |
| PSO | Particle swarm optimisation |
| SMC | Sliding mode control |
| HOSMC | High order sliding mode control |
| QCSMC | Cuasi-continous sliding mode control |
| ANN | Artificial neural networks |
| PCI | Peripheral component interconnect |
| RTI | Real-time interface |
| IAE | Integral of absolute error |
| RSMC | Root-mean-squared-error |
| TDNN | Time delay neural network |
| MLP | Multilayer perceptron |
| MSE | Mean squared error |
References
- Vander Poorten, E.; Riviere, C.N.; Abbott, J.J.; Bergeles, C.; Nasseri, M.A.; Kang, J.U.; Sznitman, R.; Faridpooya, K.; Iordachita, I. 36—Robotic Retinal Surgery. In Handbook of Robotic and Image-Guided Surgery; Abedin-Nasab, M.H., Ed.; Elsevier: Amsterdam, The Netherlands, 2020; pp. 627–672. [Google Scholar] [CrossRef]
- Han, L.; Yu, L.; Pan, C.; Zhao, H.; Jiang, Y. A Novel Impact Rotary—Linear Motor Based on Decomposed Screw-Type Motion of Piezoelectric Actuator. Appl. Sci. 2018, 8, 2492. [Google Scholar] [CrossRef] [Green Version]
- Tyunina, M.; Miksovsky, J.; Kocourek, T.; Dejneka, A. Hysteresis-Free Piezoresponse in Thermally Strained Ferroelectric Barium Titanate Films. Electron. Mater. 2021, 2, 17–23. [Google Scholar] [CrossRef]
- Damjanovic, D. Hysteresis in piezoelectric and ferroelectric materials. In The Science of Hysteresis; Academic Press: Cambridge, MA, USA, 2006; Chapter 4; pp. 338–453. [Google Scholar] [CrossRef] [Green Version]
- Xiong, R.; Liu, X.; Lai, Z. Modeling of Hysteresis in Piezoelectric Actuator Based on Segment Similarity. Micromachines 2015, 6, 1805–1824. [Google Scholar] [CrossRef] [Green Version]
- Stefanski, F.; Minorowicz, B. Open loop control of piezoelectric tube transducer. Arch. Mech. Technol. Mater. 2018, 38, 23–28. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Wang, J.; Chen, Z.; Wang, R.; Lu, K.; Sang, Z.; Ju, B. Research on Asymmetric Hysteresis Modeling and Compensation of Piezoelectric Actuators with PMPI Model. Micromachines 2020, 11, 357. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dsouza, R.; Benny, B.; Sequeira, A.; Karanth, N. Hysteresis Modeling of Amplified Piezoelectric Stack Actuator for the Control of the Microgripper. Am. Sci. Res. J. Eng. Technol. Sci. 2016, 15, 265–281. [Google Scholar]
- Ding, B.; Li, Y.; Xiao, X.; Tang, Y. Optimized PID tracking control for piezoelectric actuators based on the Bouc-Wen model. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 1576–1581. [Google Scholar] [CrossRef]
- Ma, Y.; Li, Y. Active Disturbance Compensation Based Robust Control for Speed Regulation System of Permanent Magnet Synchronous Motor. Appl. Sci. 2020, 10, 709. [Google Scholar] [CrossRef] [Green Version]
- Abidi, K.; Sabanovic, A.; Yesilyurt, S. Sliding mode control based disturbance compensation and external force estimation for a piezoelectric actuator. In Proceedings of the 8th IEEE International Workshop on Advanced Motion Control, AMC ’04, Kawasaki, Japan, 28 March 2004; pp. 529–534. [Google Scholar] [CrossRef]
- Chouza, A.; Barambones, O.; Calvo, I.; Velasco, J. Sliding Mode-Based Robust Control for Piezoelectric Actuators with Inverse Dynamics Estimation. Energies 2019, 12, 943. [Google Scholar] [CrossRef] [Green Version]
- Svečko, R.; Gleich, D.; Sarjaš, A. The Effective Chattering Suppression Technique with Adaptive Super-Twisted Sliding Mode Controller Based on the Quasi-Barrier Function; An Experimentation Setup. Appl. Sci. 2020, 10, 595. [Google Scholar] [CrossRef] [Green Version]
- Velasco, J.; Barambones, O.; Calvo, I.; Zubia, J.; Saez de Ocariz, I.; Chouza, A. Sliding Mode Control with Dynamical Correction for Time-Delay Piezoelectric Actuator Systems. Materials 2020, 13, 132. [Google Scholar] [CrossRef] [Green Version]
- Shahid, Y.; Wei, M. Comparative Analysis of Different Model-Based Controllers Using Active Vehicle Suspension System. Algorithms 2020, 13, 10. [Google Scholar] [CrossRef] [Green Version]
- Saha, S.; Amrr, S.M.; Saidi, A.S.; Banerjee, A.; Nabi, M. Finite-Time Adaptive Higher-Order SMC for the Nonlinear Five DOF Active Magnetic Bearing System. Electronics 2021, 10, 1333. [Google Scholar] [CrossRef]
- Che, X.; Tian, D.; Xu, R.; Jia, P. Finite-Time Control for Piezoelectric Actuators With a High-Order Terminal Sliding Mode Enhanced Hysteresis Observer. IEEE Access 2020, 8, 223931–223940. [Google Scholar] [CrossRef]
- Zenteno-Torres, J.; Cieslak, J.; Dávila, J.; Henry, D. Sliding Mode Control with Application to Fault-Tolerant Control: Assessment and Open Problems. Automation 2021, 2, 1–30. [Google Scholar] [CrossRef]
- Sabarianand, D.; Karthikeyan, P.; Muthuramalingam, T. A review on control strategies for compensation of hysteresis and creep on piezoelectric actuators based micro systems. Mech. Syst. Signal Process. 2020, 140, 106634. [Google Scholar] [CrossRef]
- Armin, M.; Roy, P.N.; Das, S.K. A Survey on Modelling and Compensation for Hysteresis in High Speed Nanopositioning of AFMs: Observation and Future Recommendation. Int. J. Autom. Comput. 2020, 17, 1–23. [Google Scholar] [CrossRef]
- Xue, G.; Zhang, P.; He, Z.; Li, D.; Yang, Z.; Zhao, Z. Modification and Numerical Method for the Jiles-Atherton Hysteresis Model. Commun. Comput. Phys. 2017, 21, 763–781. [Google Scholar] [CrossRef]
- Ahmed, K.; Yan, P.; Li, S. Duhem Model-Based Hysteresis Identification in Piezo-Actuated Nano-Stage Using Modified Particle Swarm Optimization. Micromachines 2021, 12, 315. [Google Scholar] [CrossRef] [PubMed]
- Su, C.Y.; Stepanenko, Y.; Svoboda, J.; Leung, T. Robust adaptive control of a class of nonlinear systems with unknown backlash-like hysteresis. IEEE Trans. Autom. Control 2000, 45, 2427–2432. [Google Scholar] [CrossRef] [Green Version]
- Gan, J.; Zhang, X. Nonlinear Hysteresis Modeling of Piezoelectric Actuators Using a Generalized Bouc–Wen Model. Micromachines 2019, 10, 183. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, M.; Wang, Q.; Li, Y.; Jiang, Z. Modeling and Discrete-Time Terminal Sliding Mode Control of a DEAP Actuator with Rate-Dependent Hysteresis Nonlinearity. Appl. Sci. 2019, 9, 2625. [Google Scholar] [CrossRef] [Green Version]
- Xu, R.; Tian, D.; Wang, Z. Adaptive Tracking Control for the Piezoelectric Actuated Stage Using the Krasnosel’skii-Pokrovskii Operator. Micromachines 2020, 11, 537. [Google Scholar] [CrossRef]
- Gan, J.; Zhang, X.; Wu, H. Tracking control of piezoelectric actuators using a polynomial-based hysteresis model. AIP Adv. 2016, 6, 065204. [Google Scholar] [CrossRef] [Green Version]
- Silaa, M.; Derbeli, M.; Barambones, O.; Cheknane, A. Design and Implementation of High Order Sliding Mode Control for PEMFC Power System. Energies 2020, 13, 4317. [Google Scholar] [CrossRef]
- Giordano, J.L. On the sensitivity, precision and resolution in DC Wheatstone bridges. Eur. J. Phys. 1997, 18, 22–27. [Google Scholar] [CrossRef]
- Qin, Y.; Duan, H. Single-Neuron Adaptive Hysteresis Compensation of Piezoelectric Actuator Based on Hebb Learning Rules. Micromachines 2020, 11, 84. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ventura, U.P.; Fridman, L. Chattering measurement in SMC and HOSMC. In Proceedings of the 2016 14th International Workshop on Variable Structure Systems (VSS), Nanjing, China, 1–4 June 2016; pp. 108–113. [Google Scholar] [CrossRef]
- Levant, A. Principles of 2-sliding mode design. Automatica 2007, 43, 576–586. [Google Scholar] [CrossRef] [Green Version]
- Napole, C.; Barambones, O.; Derbeli, M.; Silaa, M.; Calvo, I.; Velasco, J. Tracking Control for Piezoelectric Actuators with Advanced Feed-Forward Compensation Combined with PI Control. Proceedings 2020, 64, 29. [Google Scholar] [CrossRef]
- Kaiser, M. Time-delay neural networks for control. IFAC Proc. Vol. 1994, 27, 967–972. [Google Scholar] [CrossRef]
- Du, Y.C.; Stephanus, A. Levenberg-Marquardt Neural Network Algorithm for Degree of Arteriovenous Fistula Stenosis Classification Using a Dual Optical Photoplethysmography Sensor. Sensors 2018, 18, 2322. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vilanova, R.; Alfaro, V.M. Control PID robusto: Una visión panorámica. Rev. Iberoam. Autom. Inform. Ind. 2011, 8, 141–158. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PEA PK4FYC2 | Values | Units |
|---|---|---|
| Maximum displacement | 38.5 | m |
| Blocking force | 1000 | N |
| Resonant frequency | 34 | kHz |
| Maximum error | 15 | % |
| Driver Cube KPZ101 | ||
| Output driving voltage for PEA | 150 | V |
| Input driving voltage | 0–10 | V |
| Maximum output bandwidth | 1 | kHz |
| Reader Cube KSG101 | ||
| Output range | 0–10 | V |
| Resolution | 1 | nm |
| Pre-Amplifier AMP002 | ||
| Output range | 0–2 | V |
| Reference | IAE | RMSE (m) | Chatt(u) in 4 s | ||||||
|---|---|---|---|---|---|---|---|---|---|
| QCSMC-ANN | PID | Diff (%) | QCSMC-ANN | PID | Diff (%) | QCSMC-ANN | PID | Diff (%) | |
| Triangle | 0.1314 | 0.28 | 53.07 | 0.0404 | 0.0756 | 46.5 | 412.75 | 640.97 | 35.6 |
| Sine wave | 0.0518 | 0.28 | 81.5 | 0.0161 | 0.0795 | 79.7 | 108.8 | 600.8 | 81.8 |
| Var. Amp. | 0.2067 | 0.33 | 33.6 | 0.0318 | 0.0519 | 38.5 | 514.88 | 659.4 | 22 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Napole, C.; Barambones, O.; Derbeli, M.; Calvo, I. Advanced Trajectory Control for Piezoelectric Actuators Based on Robust Control Combined with Artificial Neural Networks. Appl. Sci. 2021, 11, 7390. https://doi.org/10.3390/app11167390
Napole C, Barambones O, Derbeli M, Calvo I. Advanced Trajectory Control for Piezoelectric Actuators Based on Robust Control Combined with Artificial Neural Networks. Applied Sciences. 2021; 11(16):7390. https://doi.org/10.3390/app11167390
Chicago/Turabian StyleNapole, Cristian, Oscar Barambones, Mohamed Derbeli, and Isidro Calvo. 2021. "Advanced Trajectory Control for Piezoelectric Actuators Based on Robust Control Combined with Artificial Neural Networks" Applied Sciences 11, no. 16: 7390. https://doi.org/10.3390/app11167390
APA StyleNapole, C., Barambones, O., Derbeli, M., & Calvo, I. (2021). Advanced Trajectory Control for Piezoelectric Actuators Based on Robust Control Combined with Artificial Neural Networks. Applied Sciences, 11(16), 7390. https://doi.org/10.3390/app11167390