
Design of an On-Grid Microinverter Control Technique for Managing Active and Reactive Power in a Microgrid

 and
and 
Abstract
:1. Introduction
2. Materials and Methods
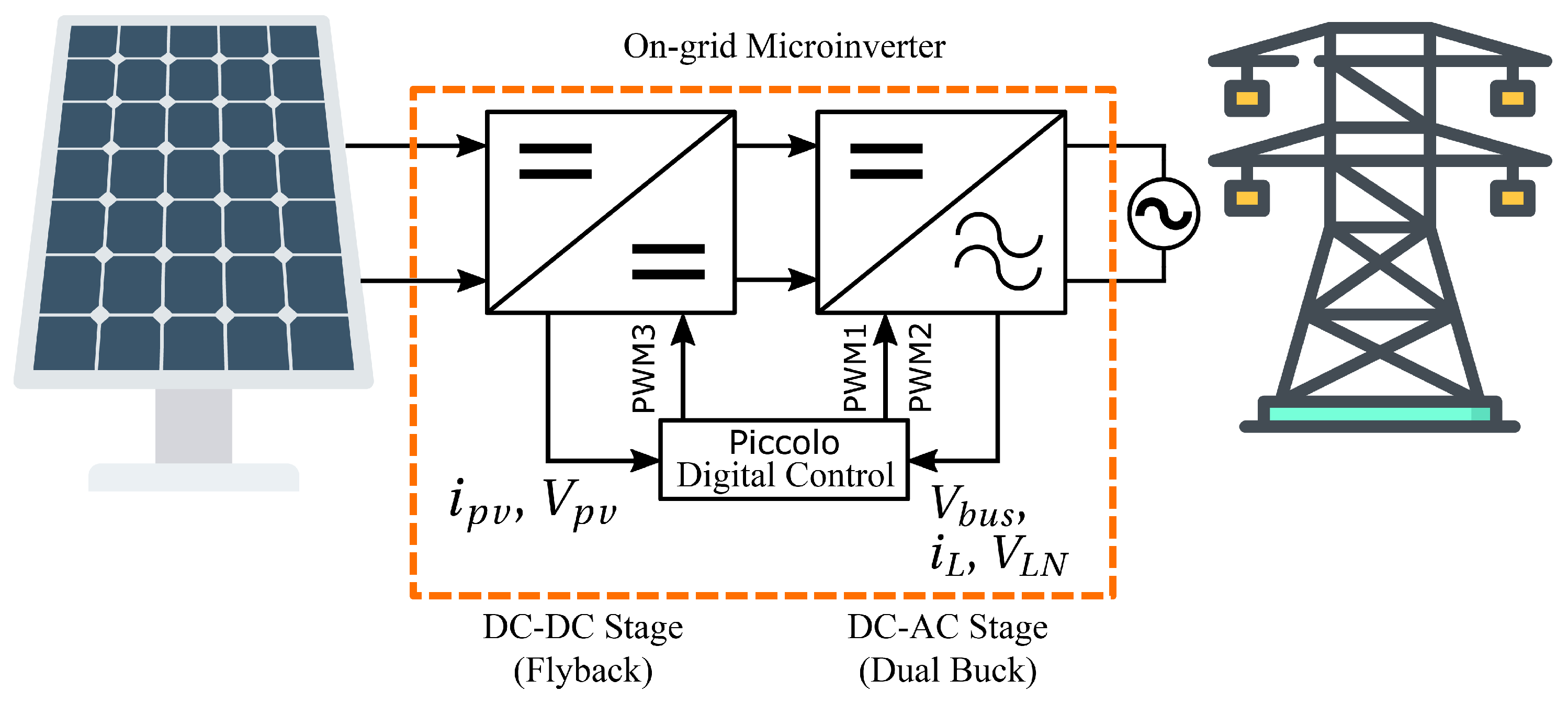
2.1. Model of the Injection System
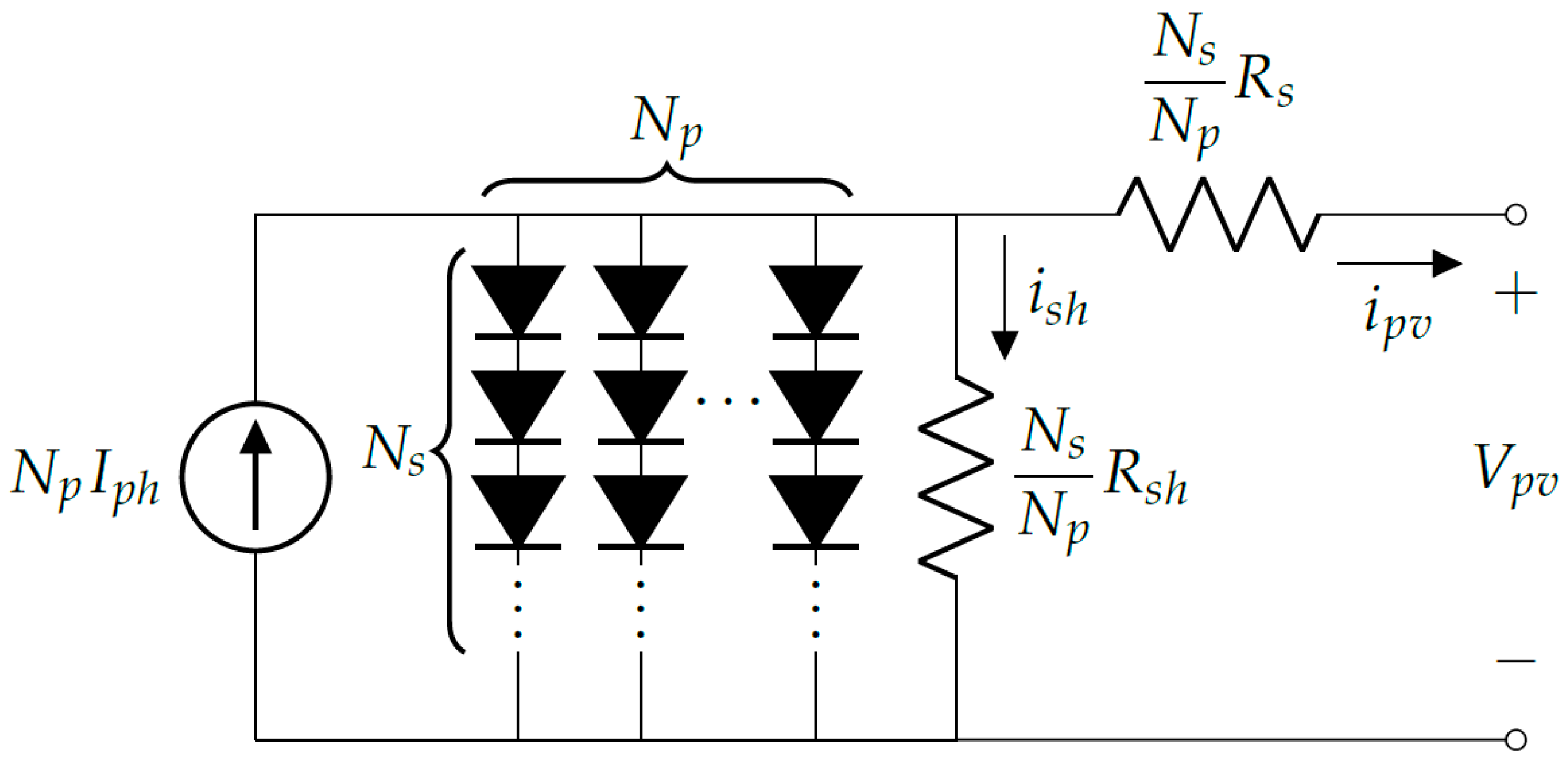
2.1.1. Solar Panel Model
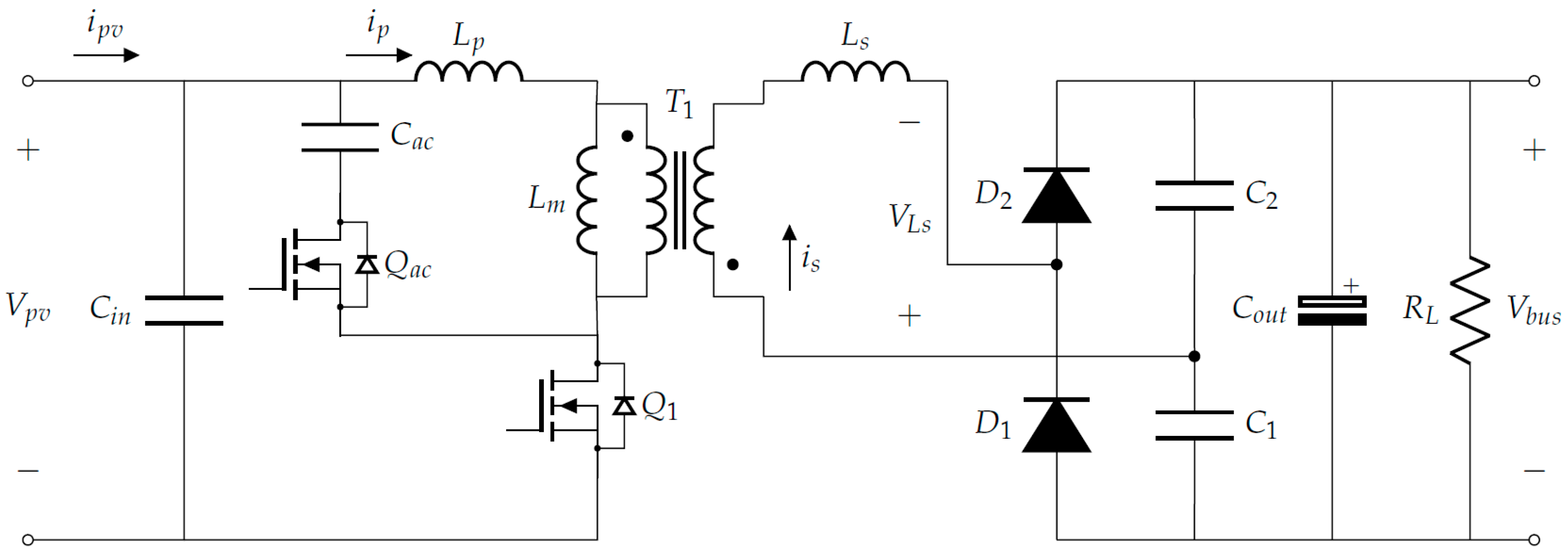
2.1.2. Active Clamp Flyback Model
- Subinterval 1
- Subinterval 2
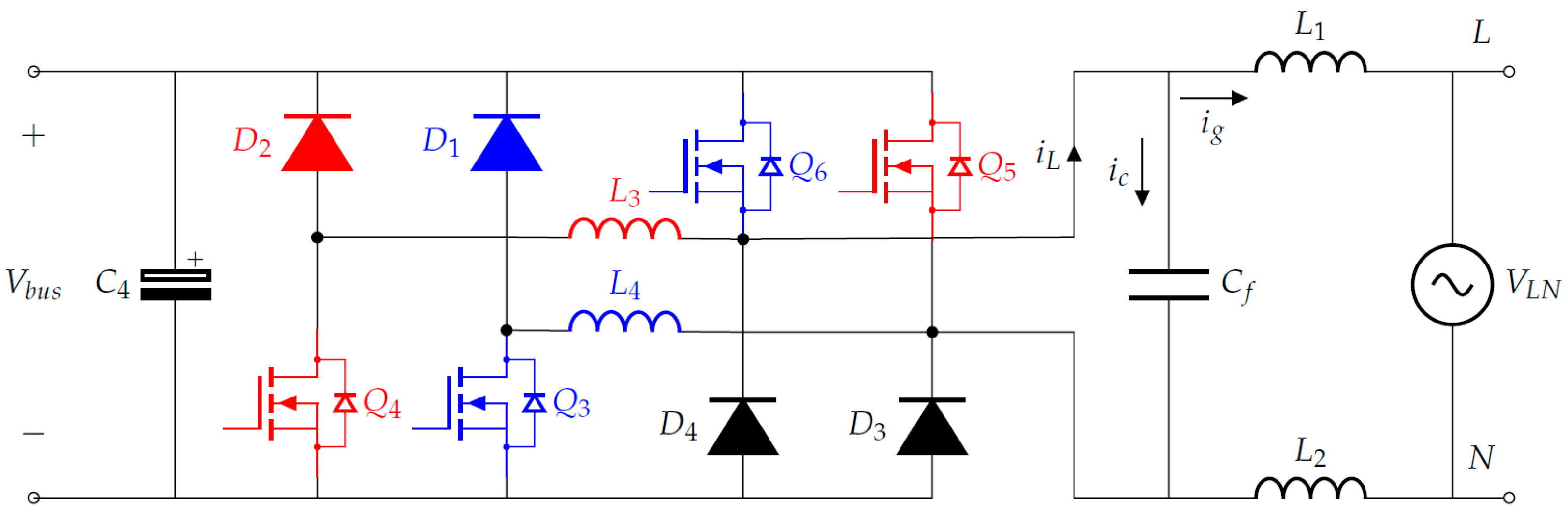
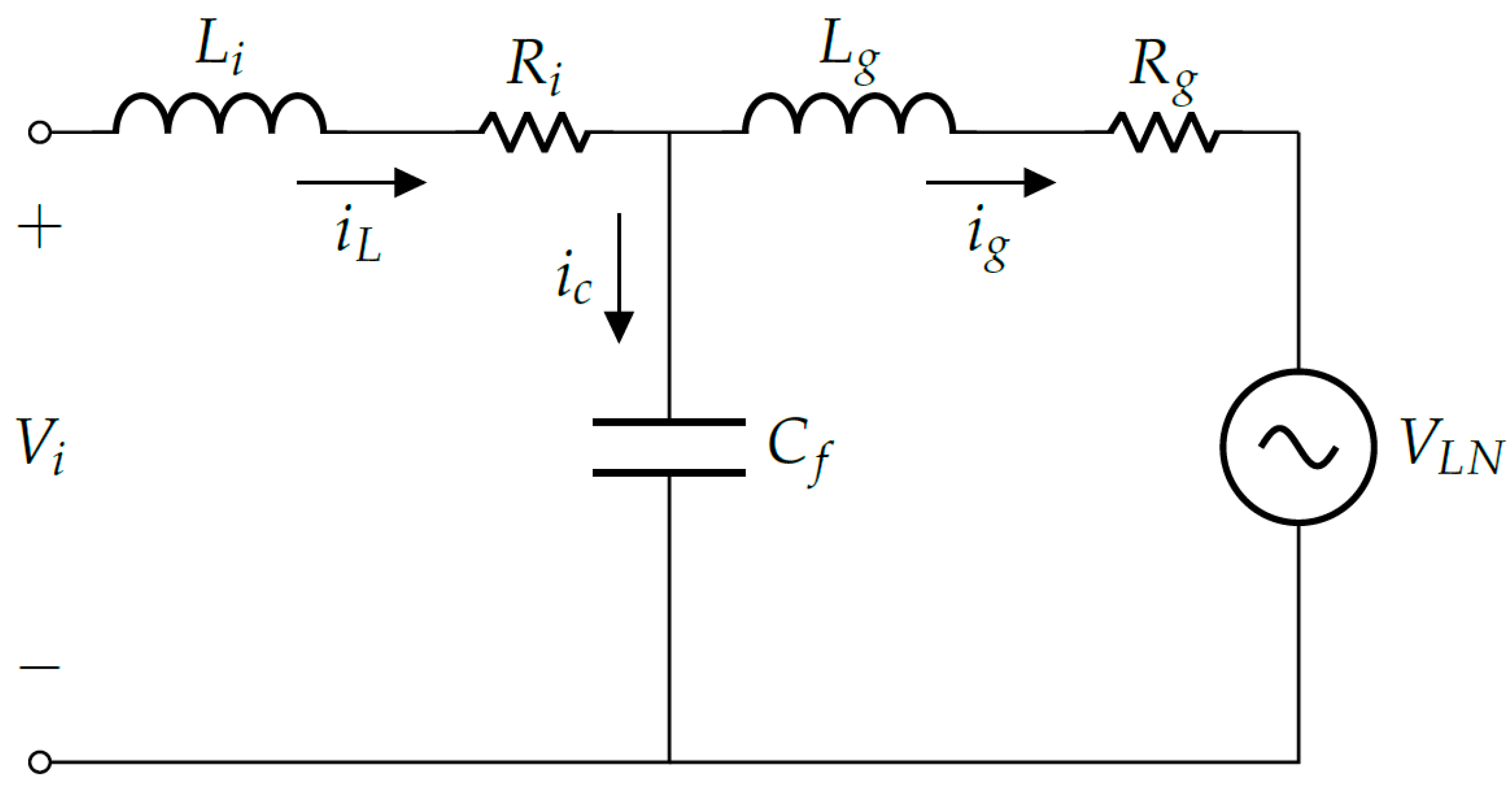
2.1.3. Dual-Buck Inverter Model
2.2. Design of the DC-DC Controllers
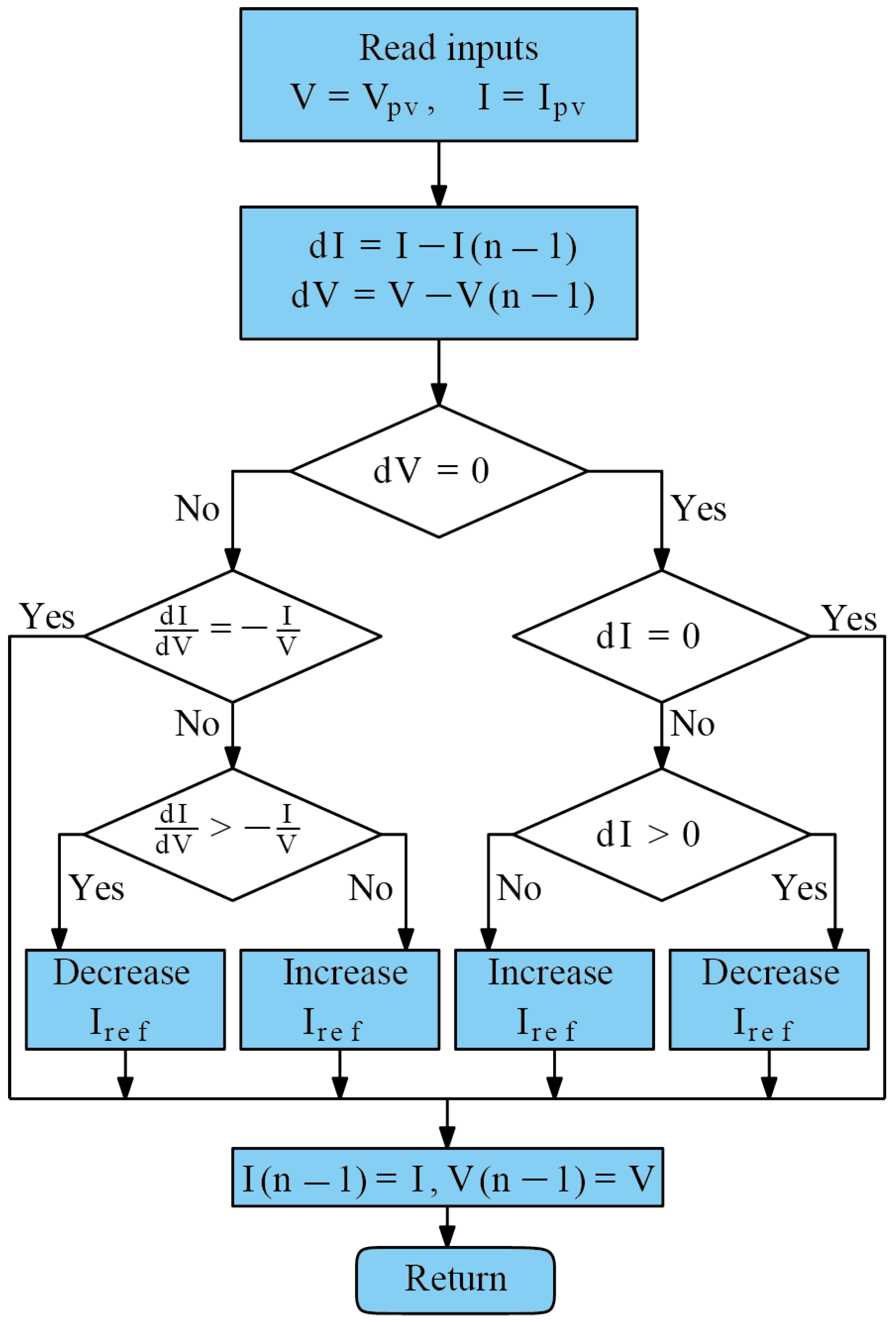
2.2.1. Incremental Conductance MPPT
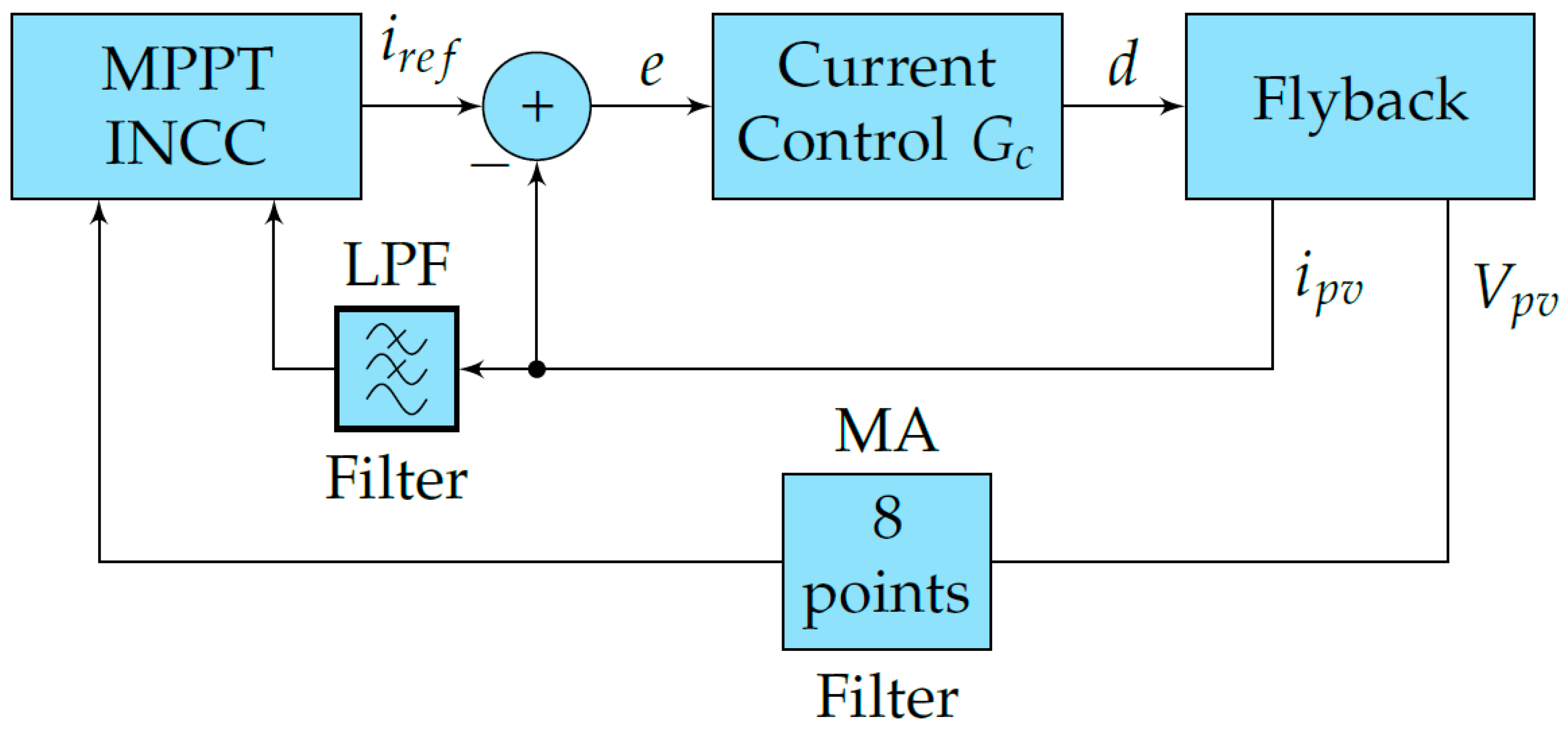
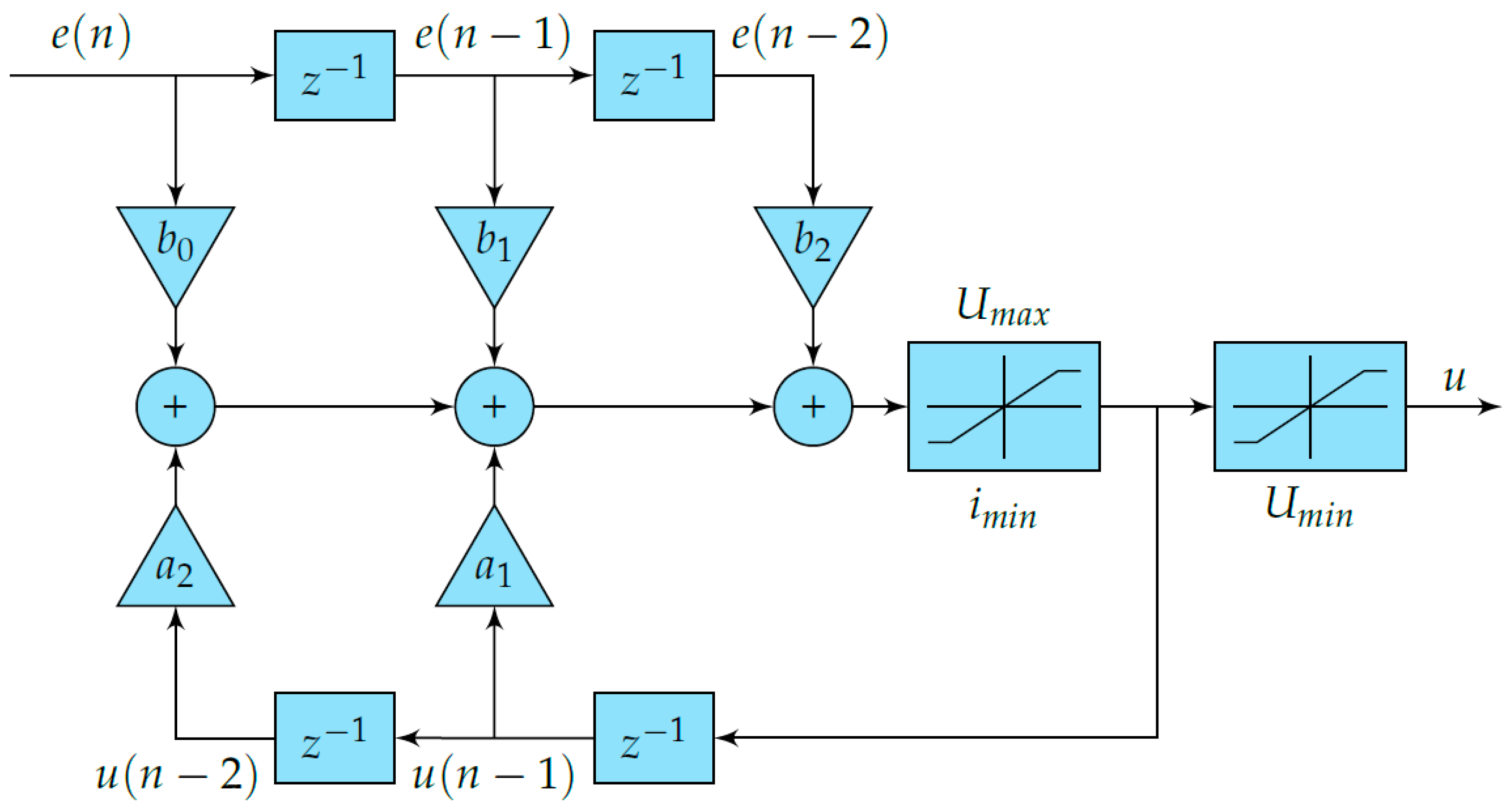
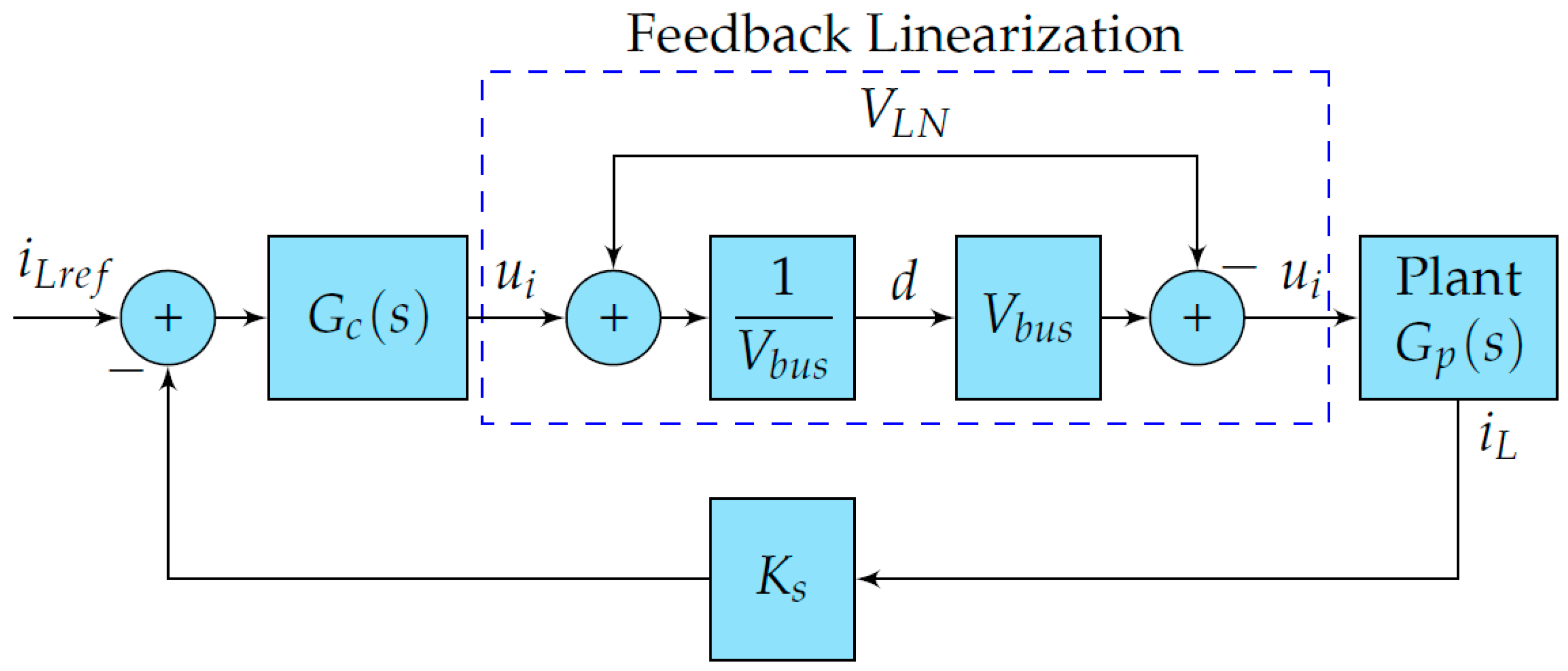
2.2.2. Current Control
2.2.3. Signal Filtering
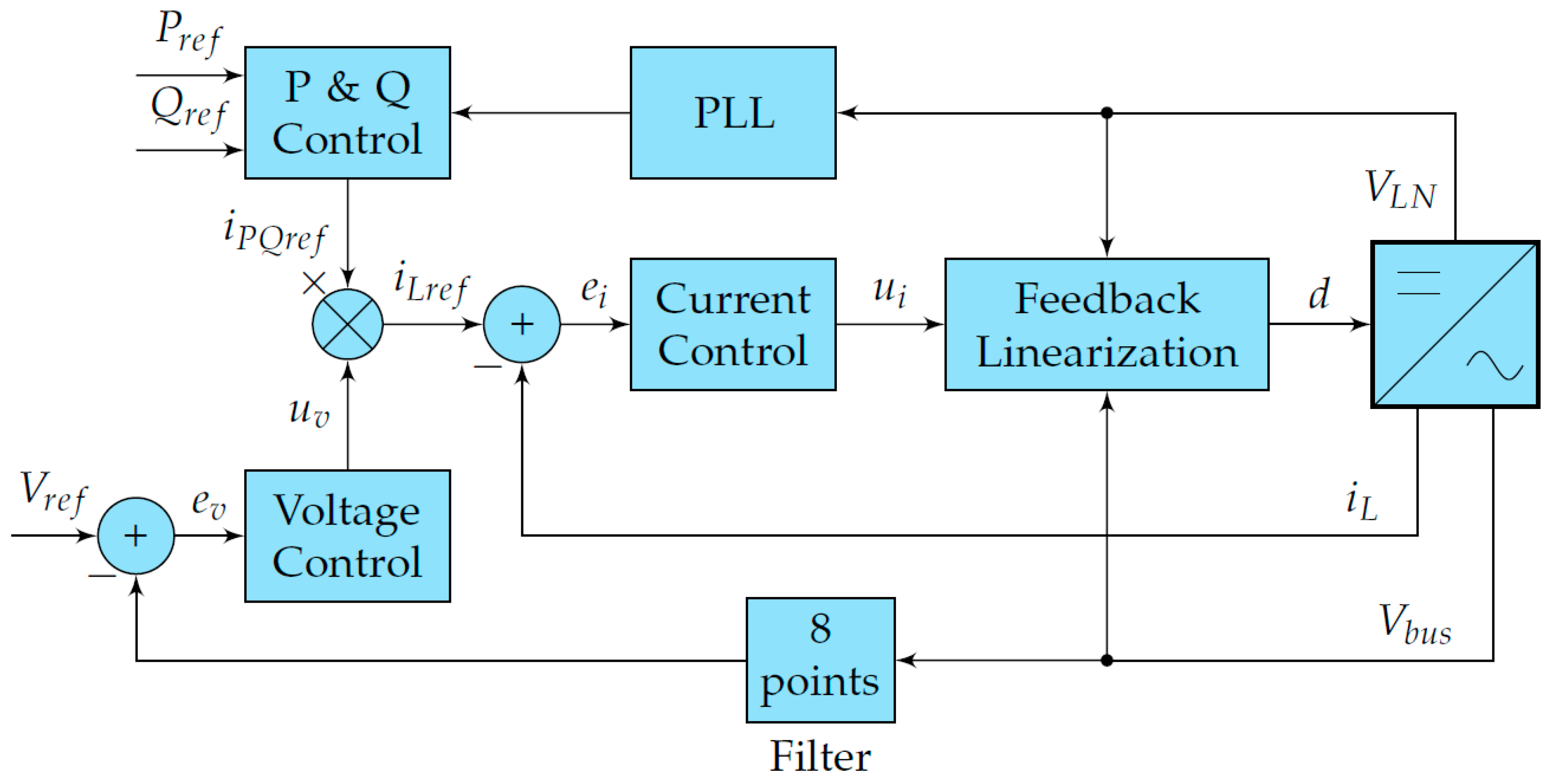
2.3. Design of the DC-AC Controller
2.3.1. Voltage Control (PI)
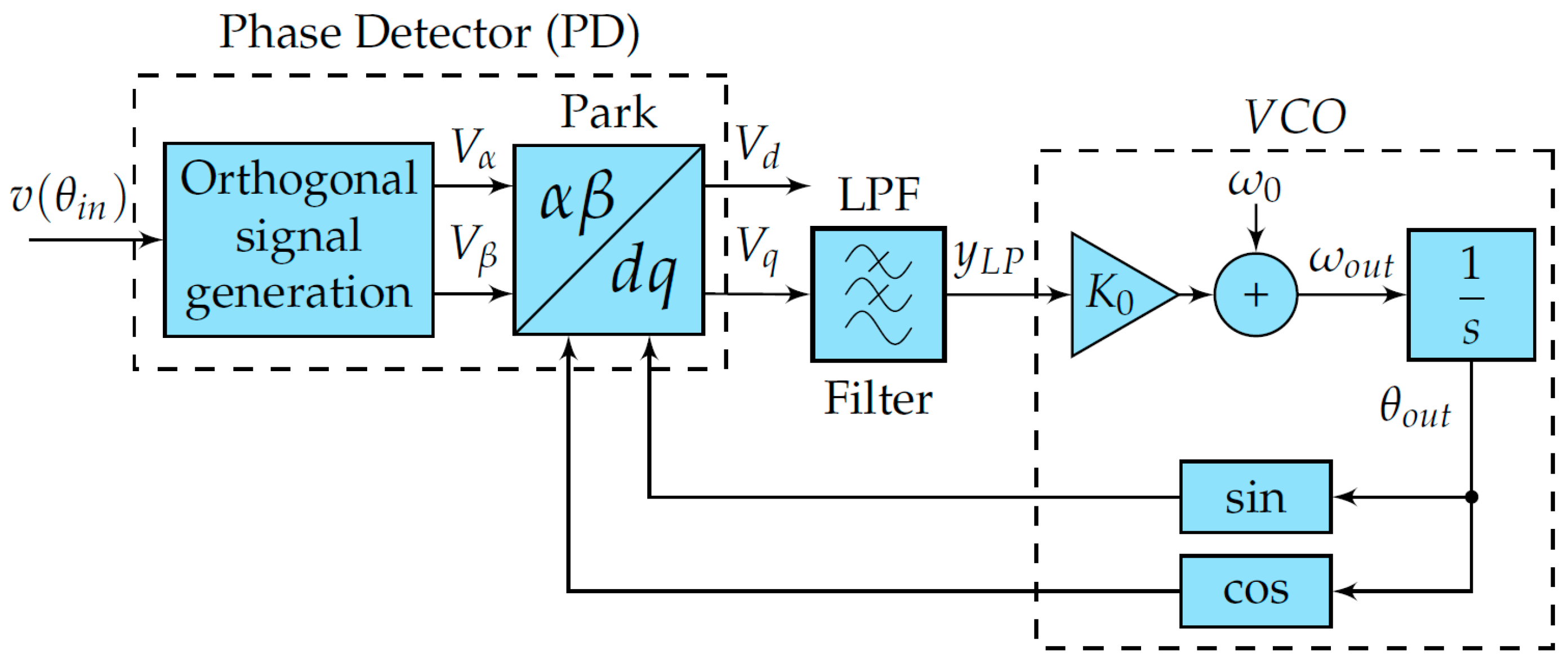
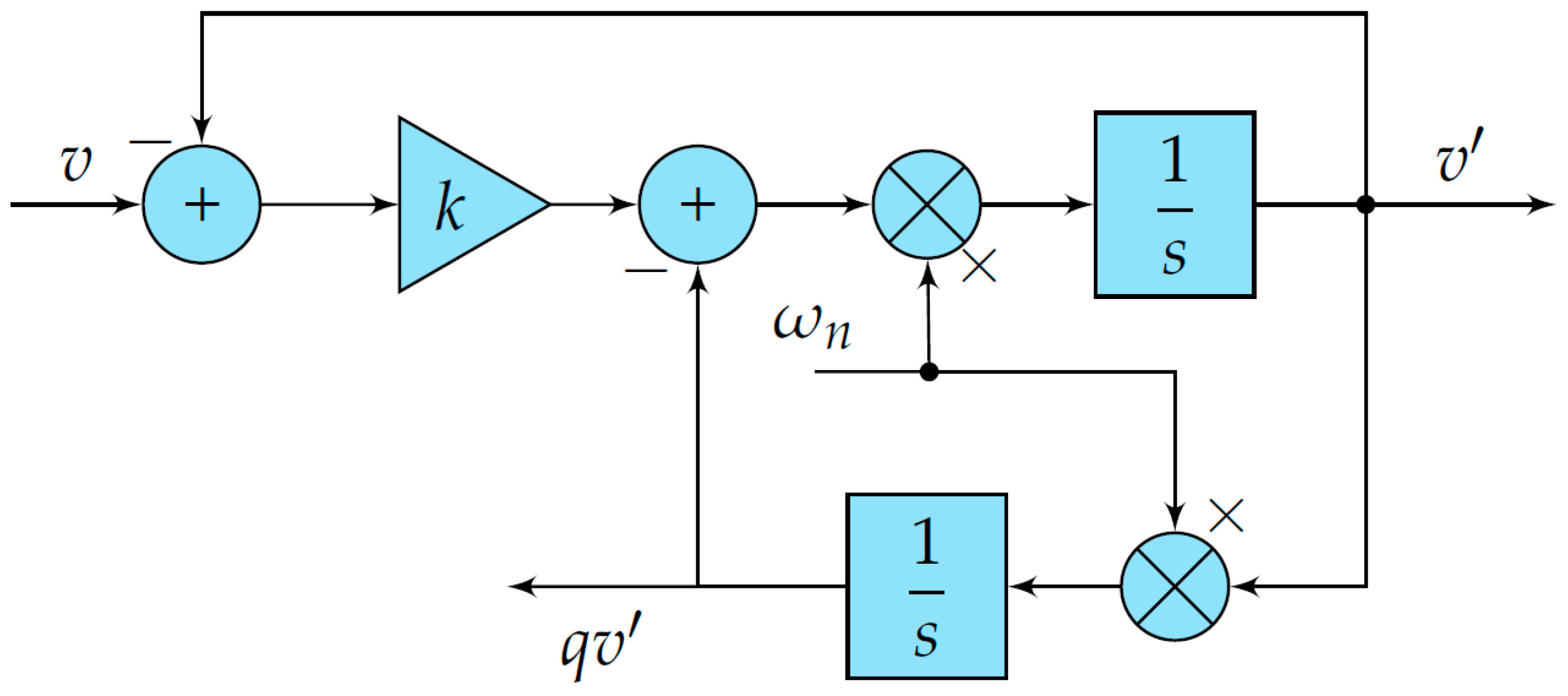
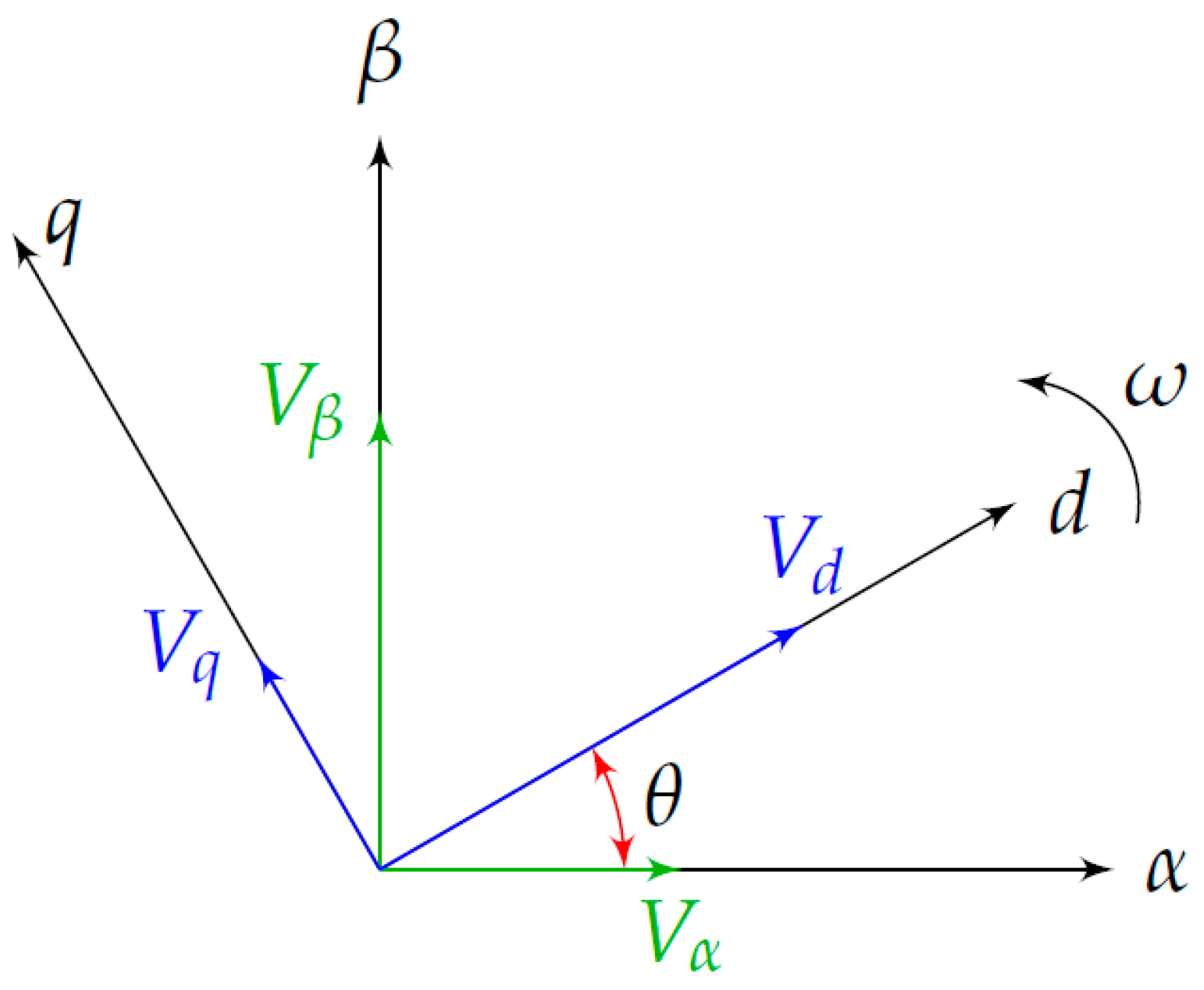
2.3.2. Phase-Locked Loop (PLL)
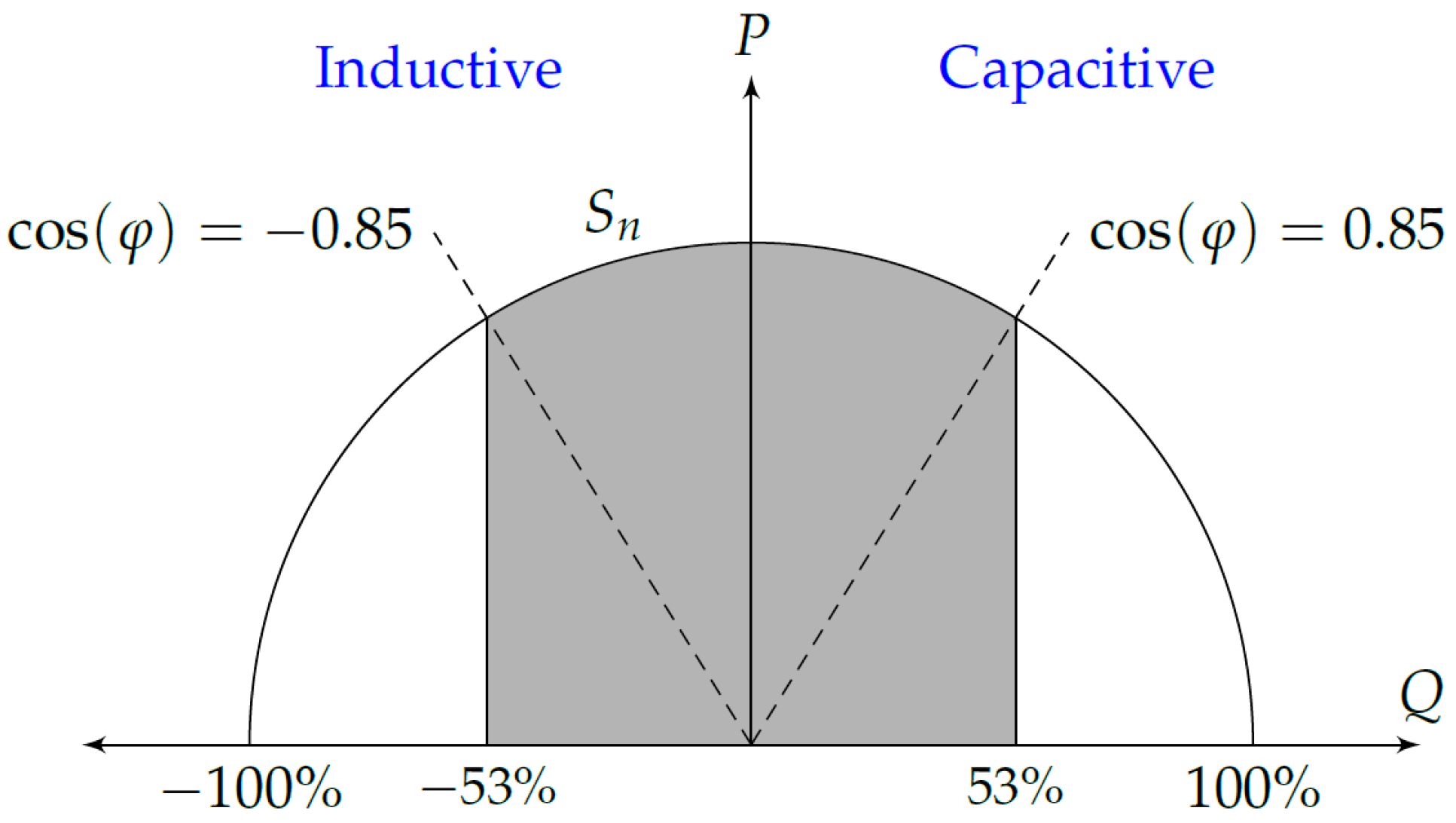
2.3.3. Active and Reactive Power Control
2.3.4. Current Control
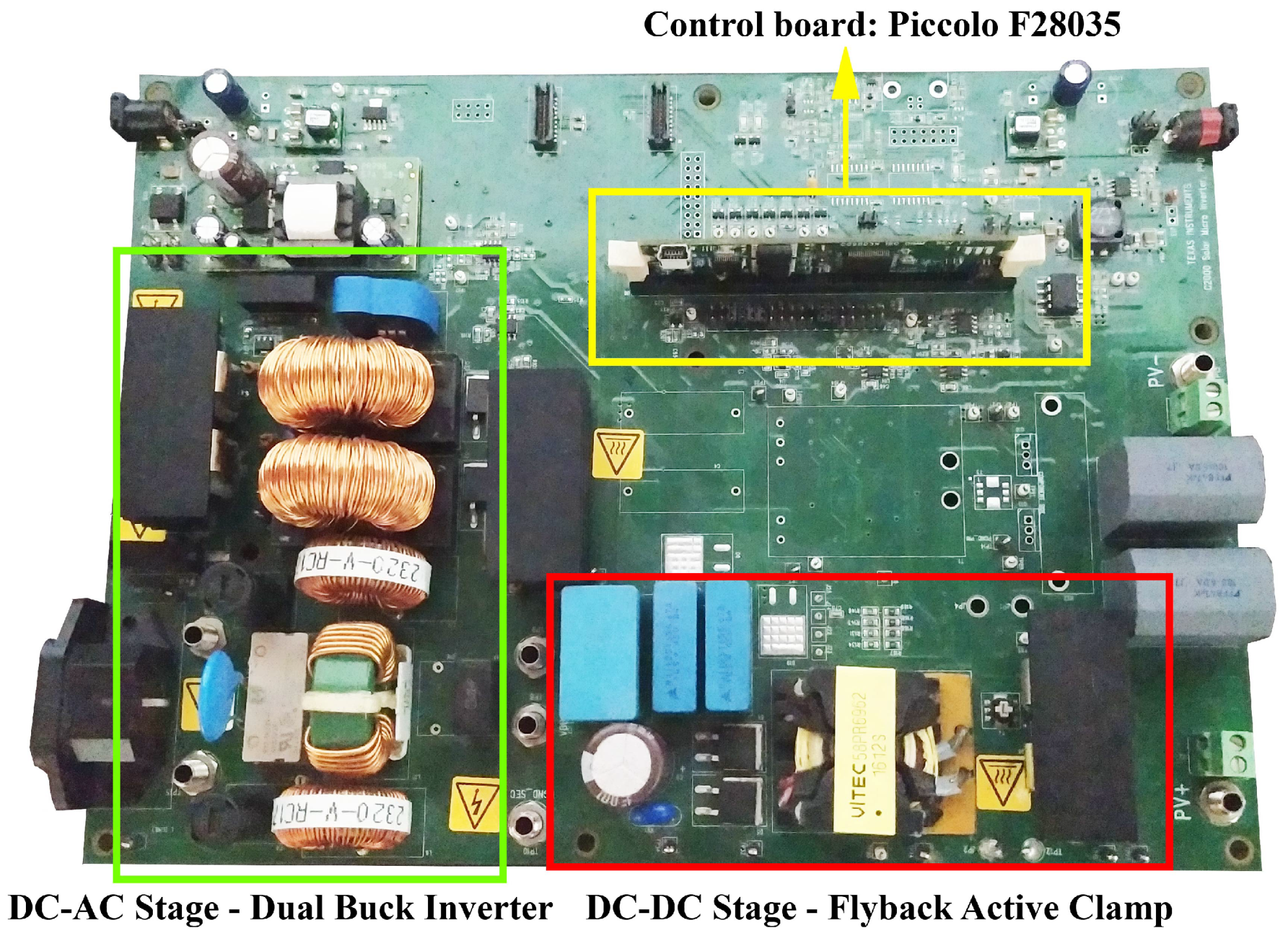
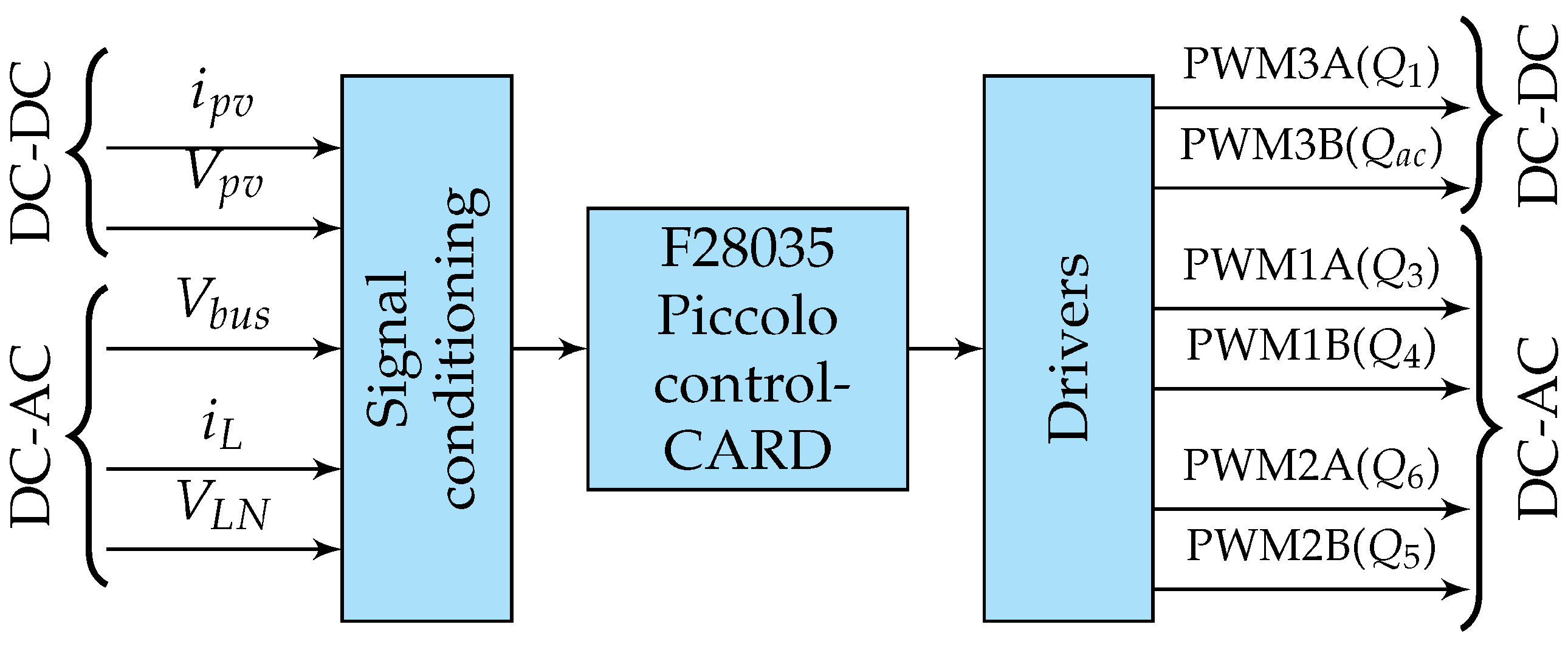
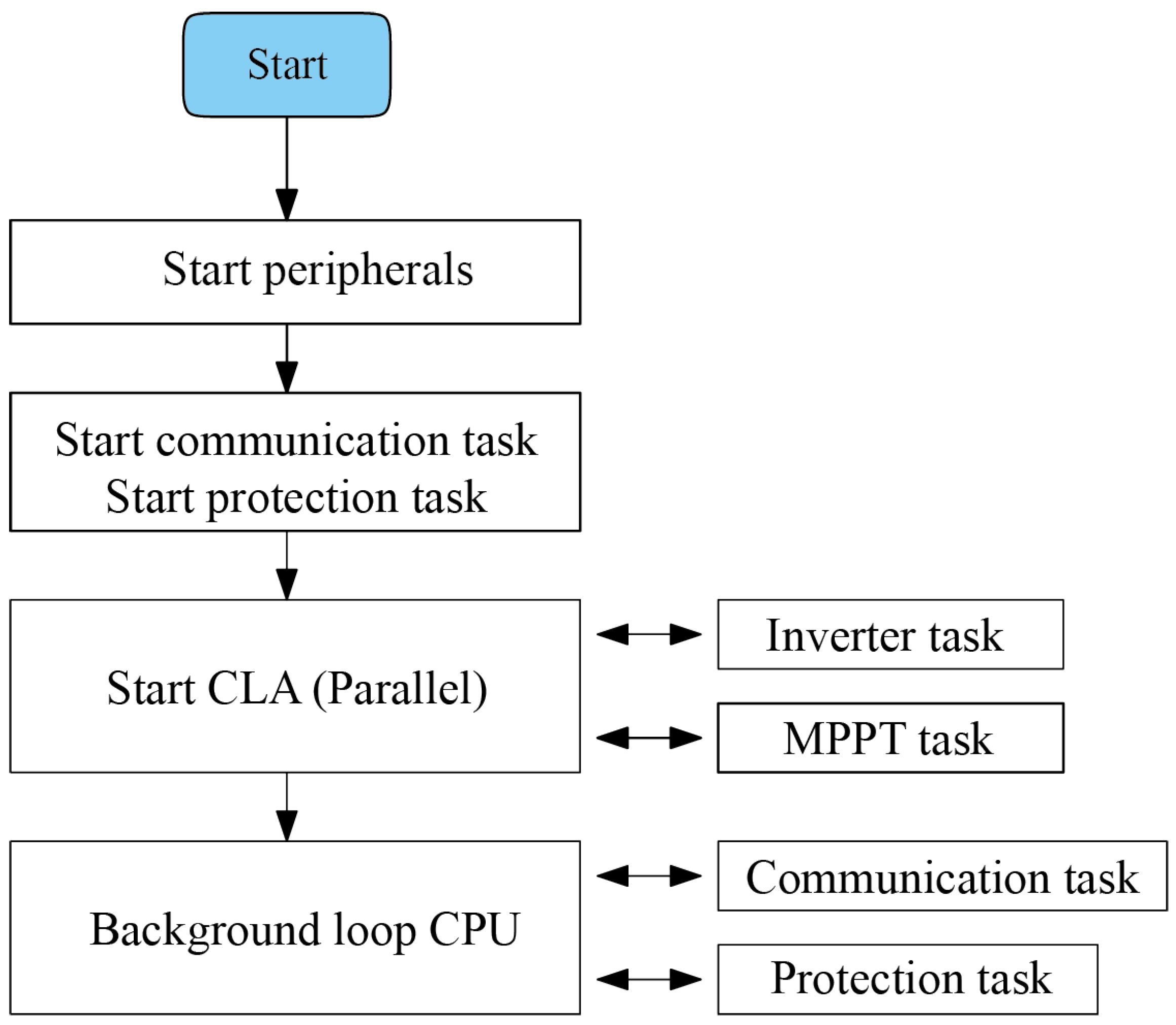
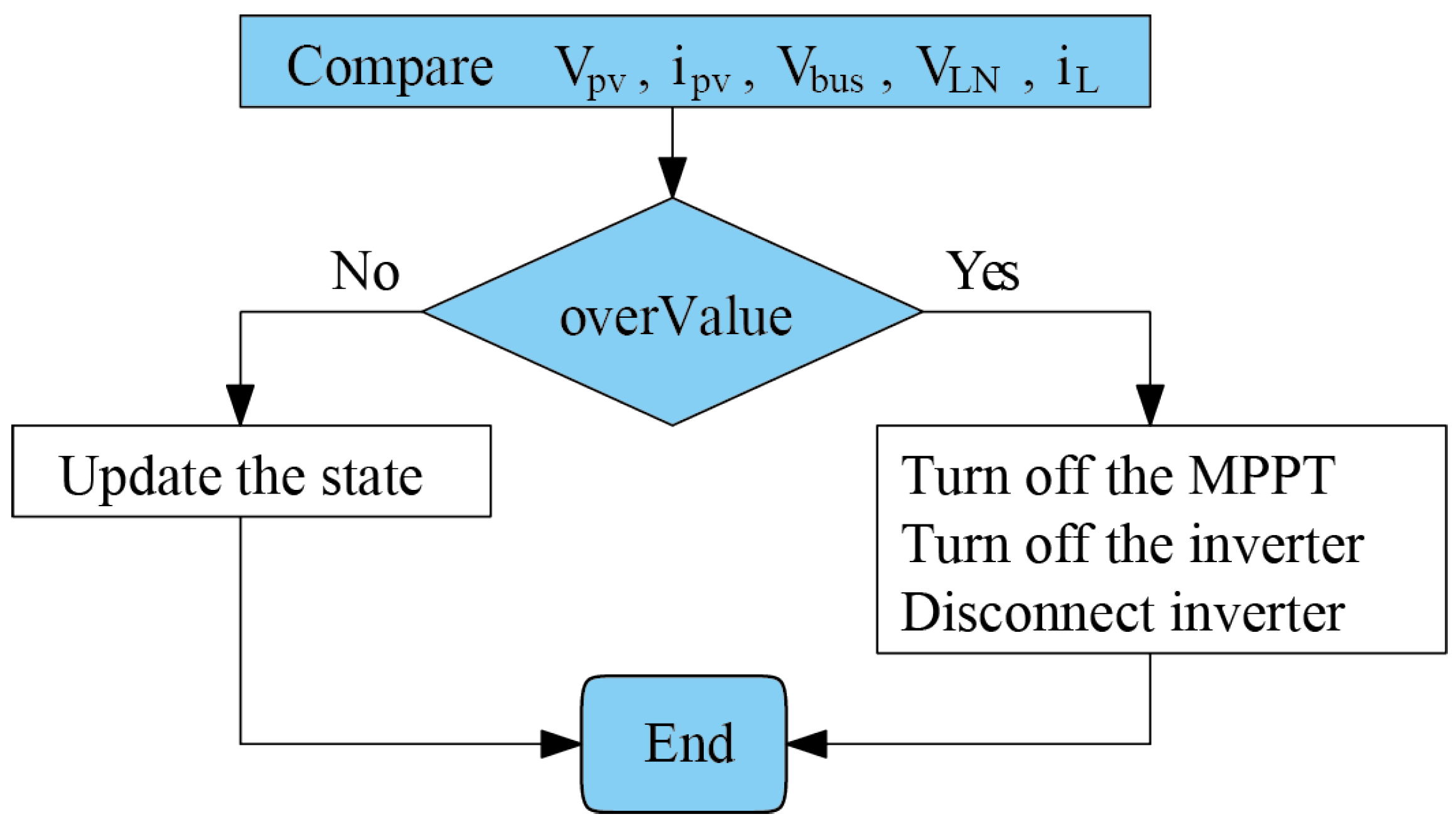
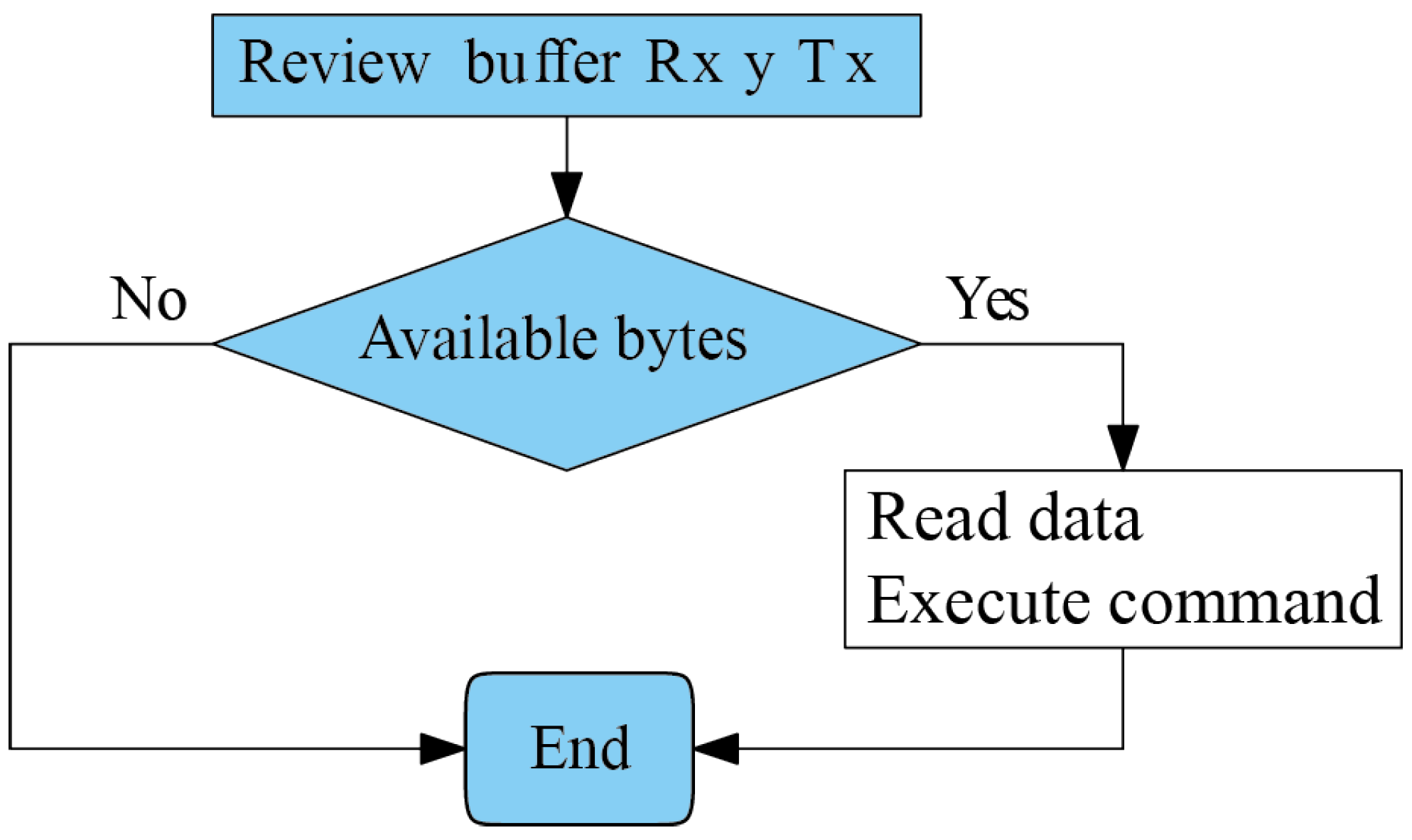
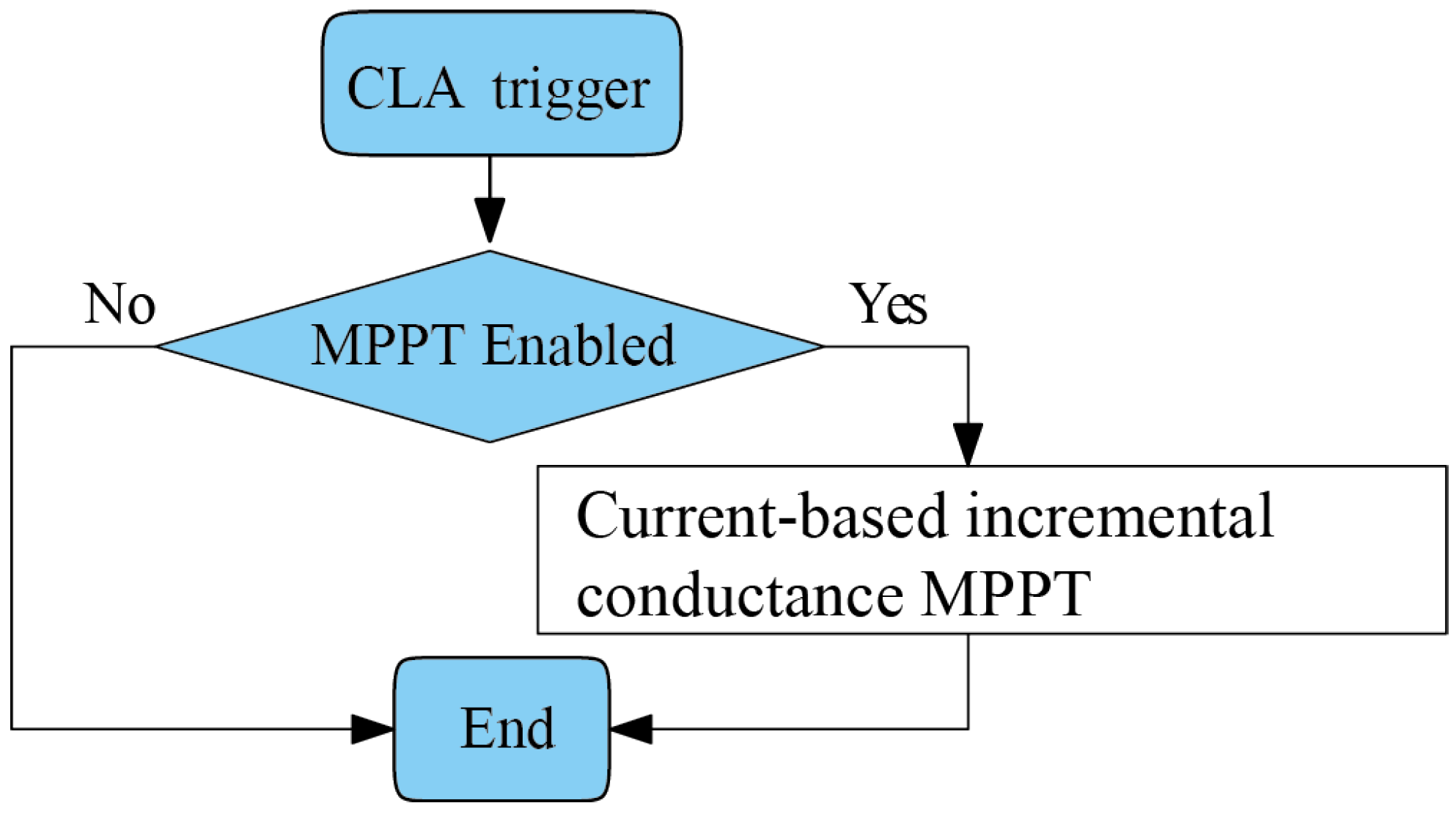
2.4. Implementation
3. Results
3.1. Simulation Results
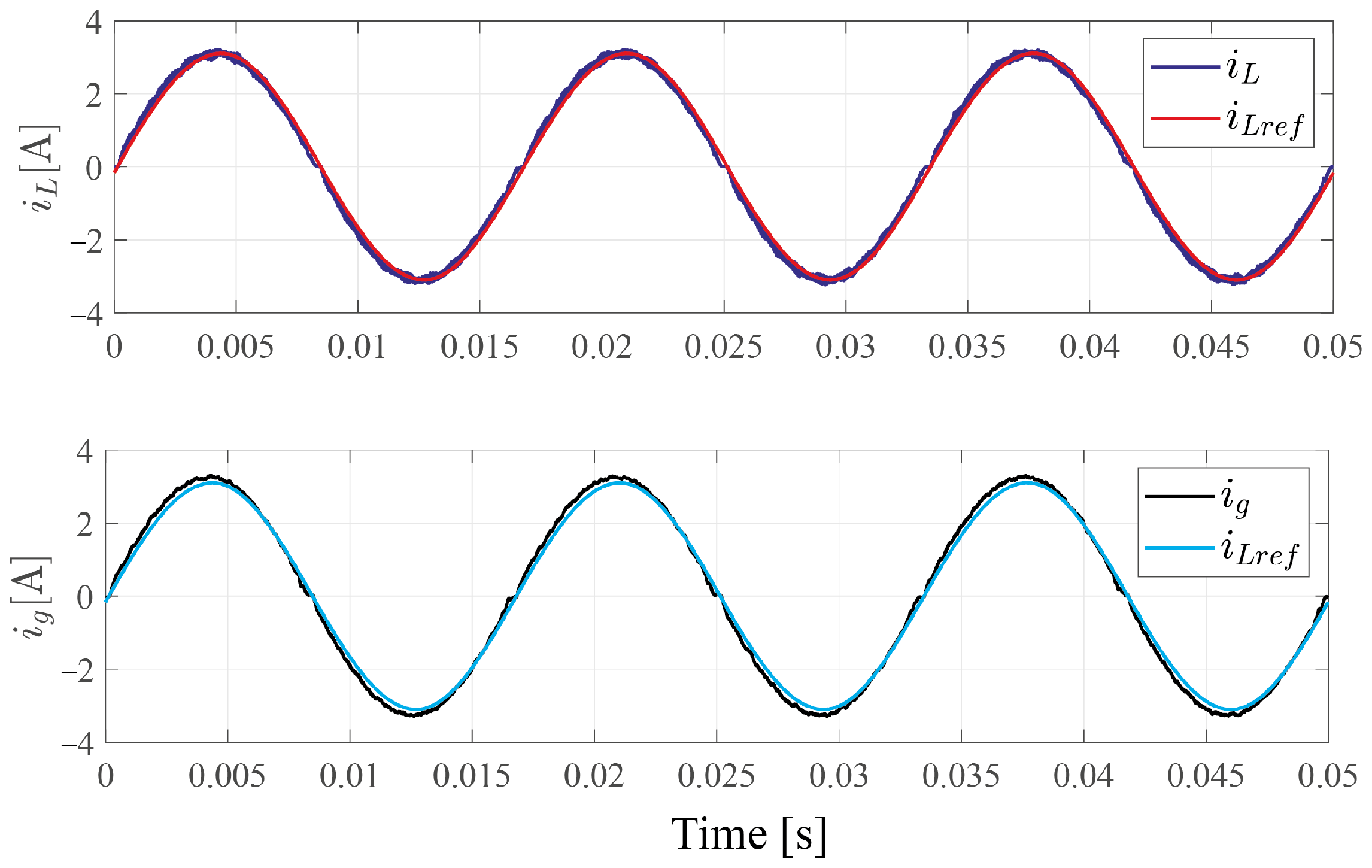
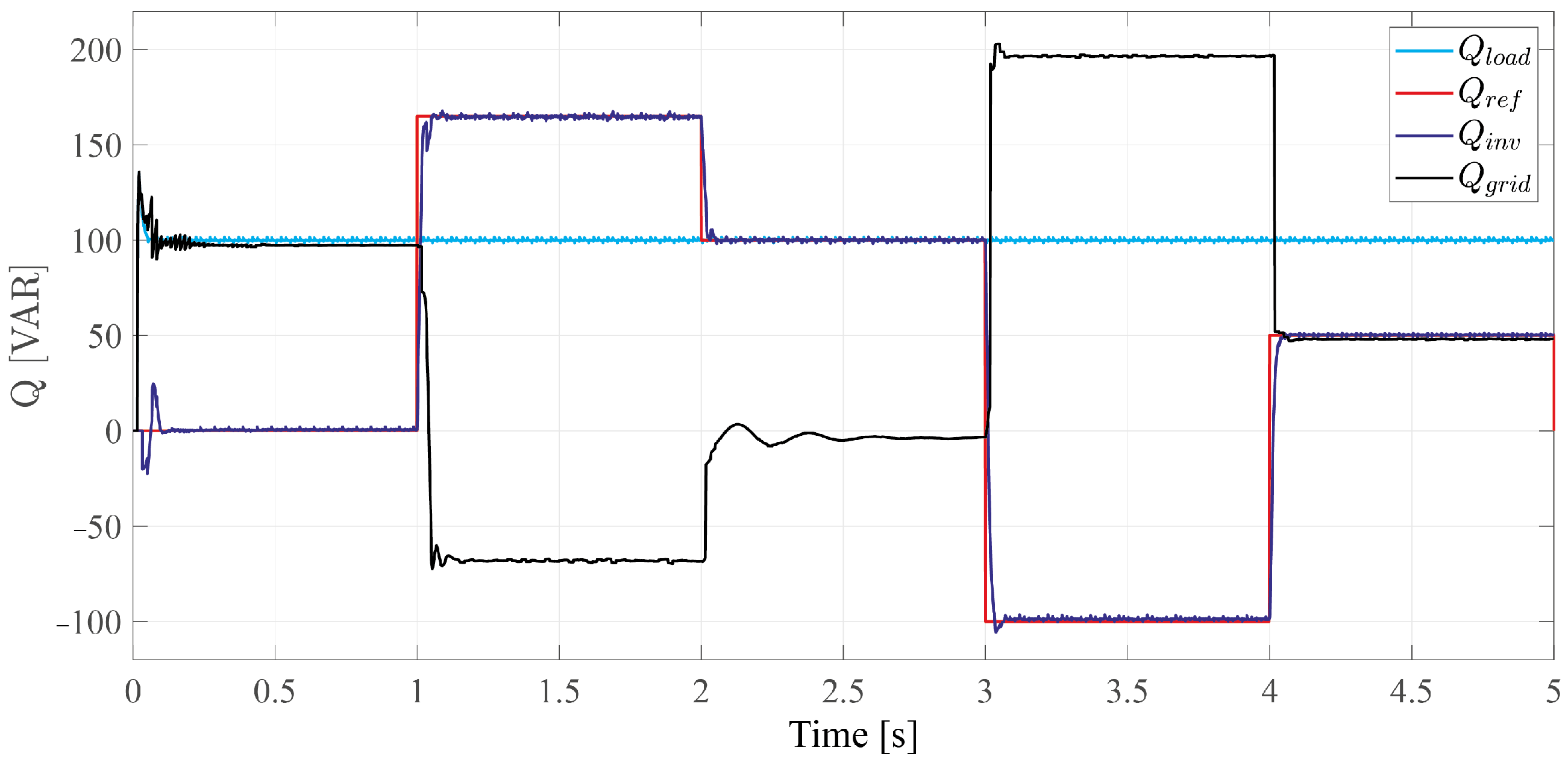
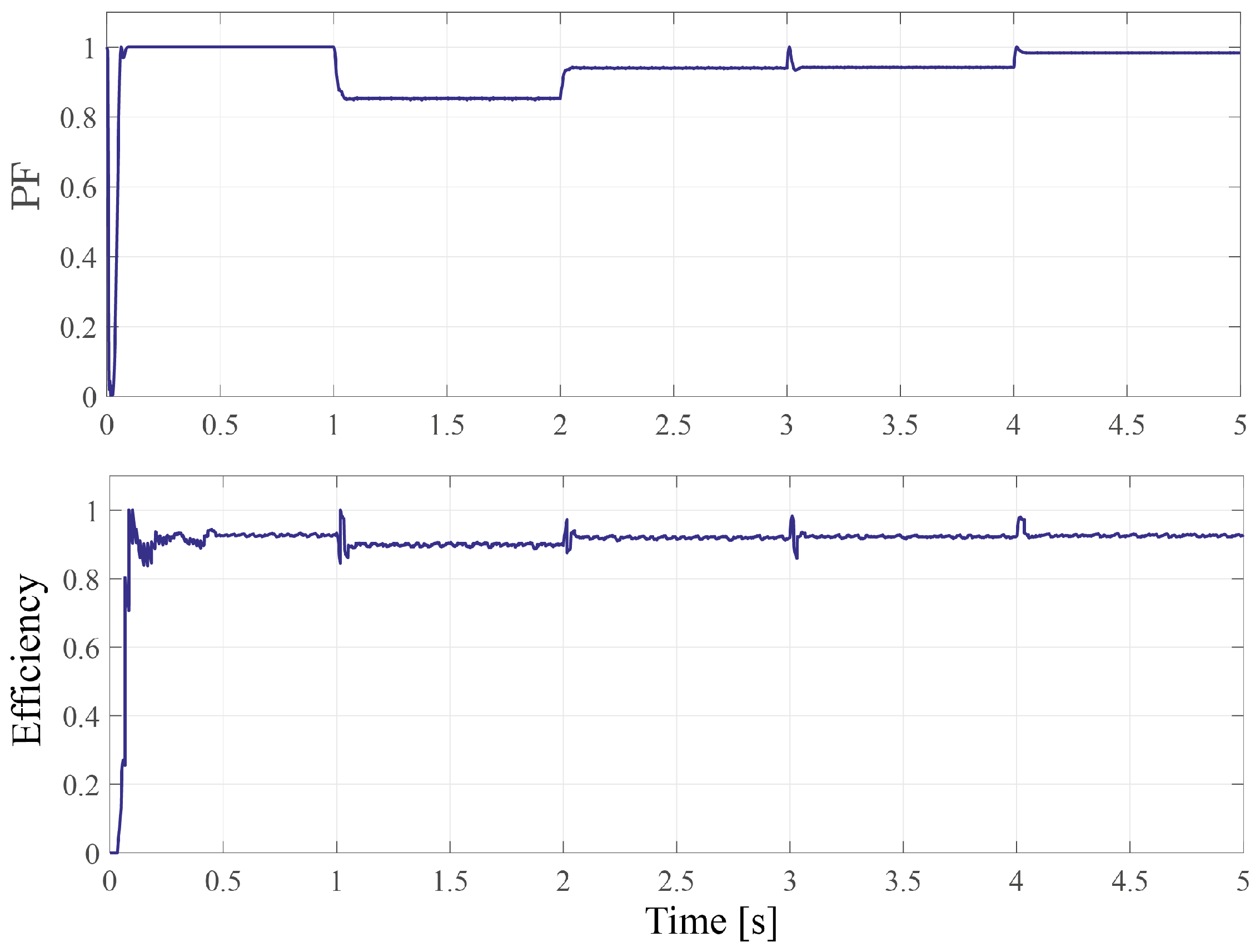
3.1.1. Active and Reactive Power Control
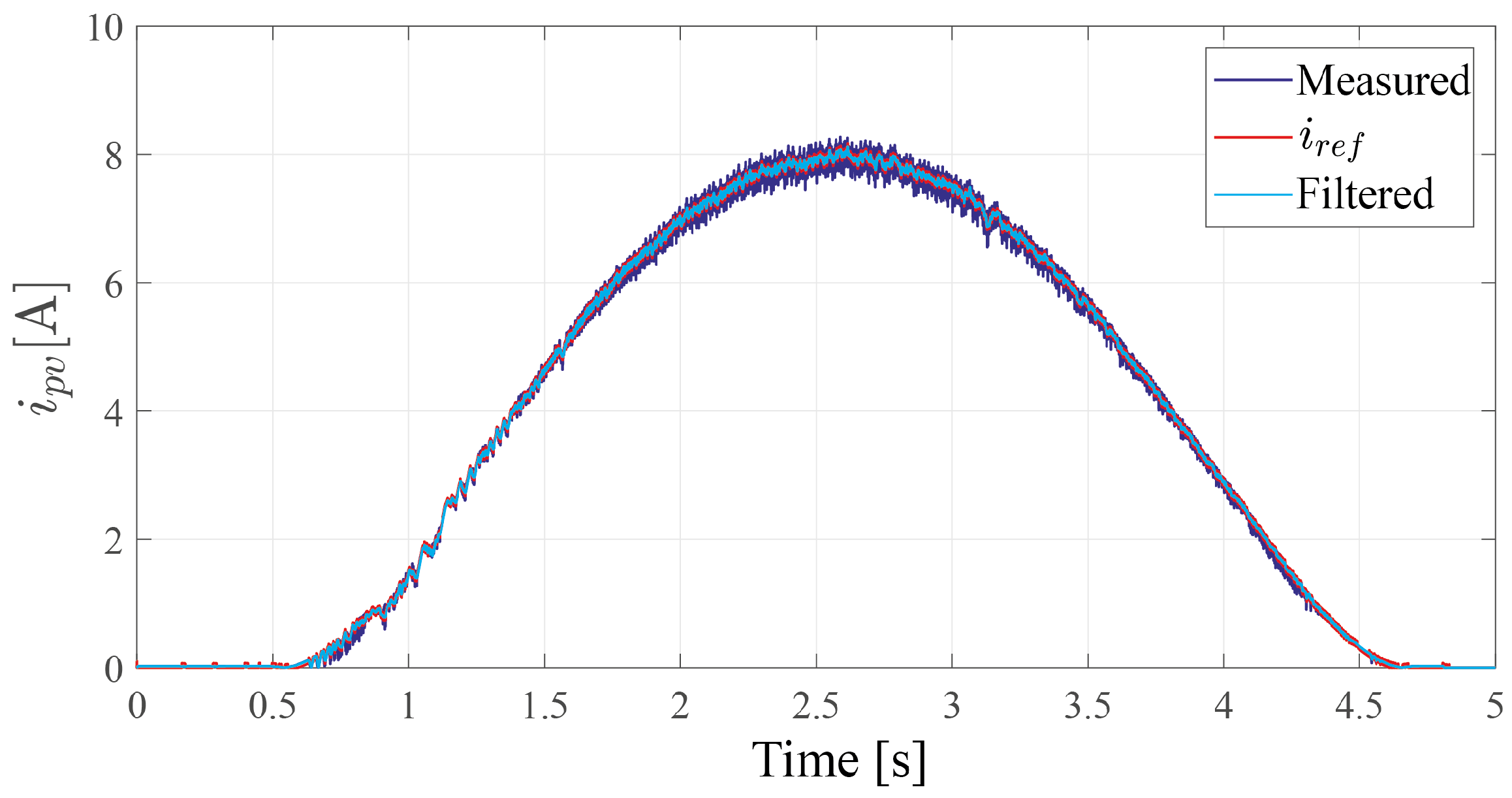
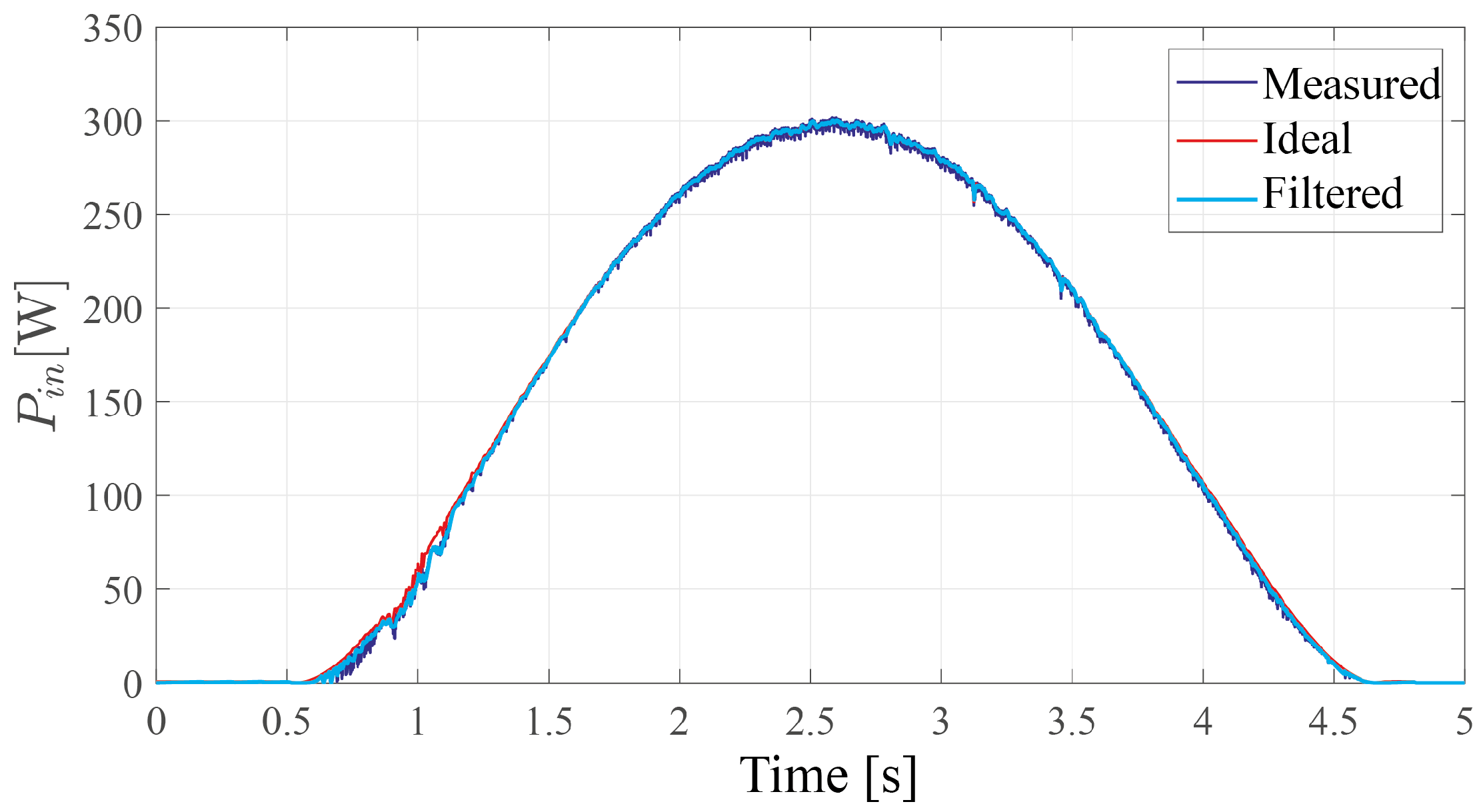
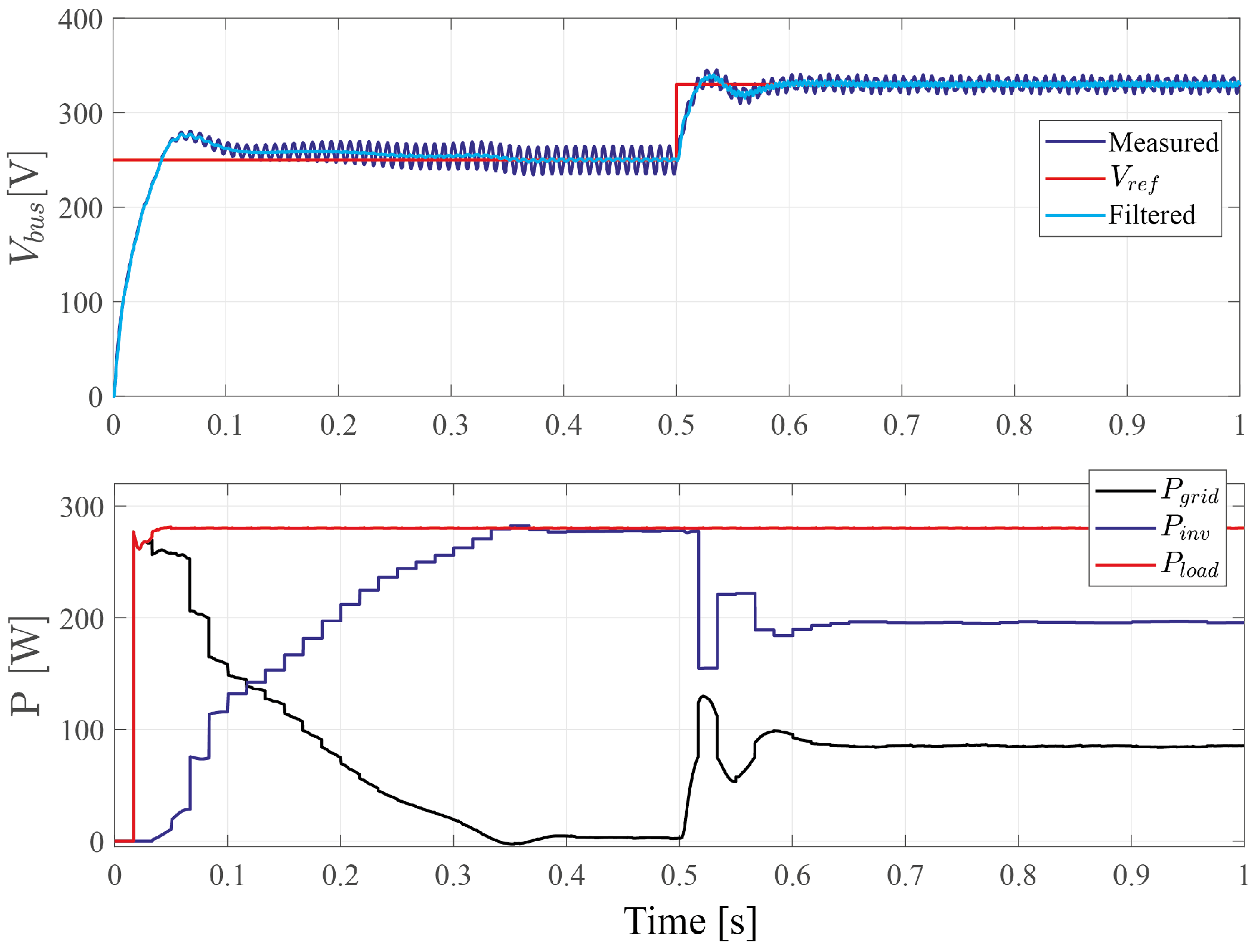
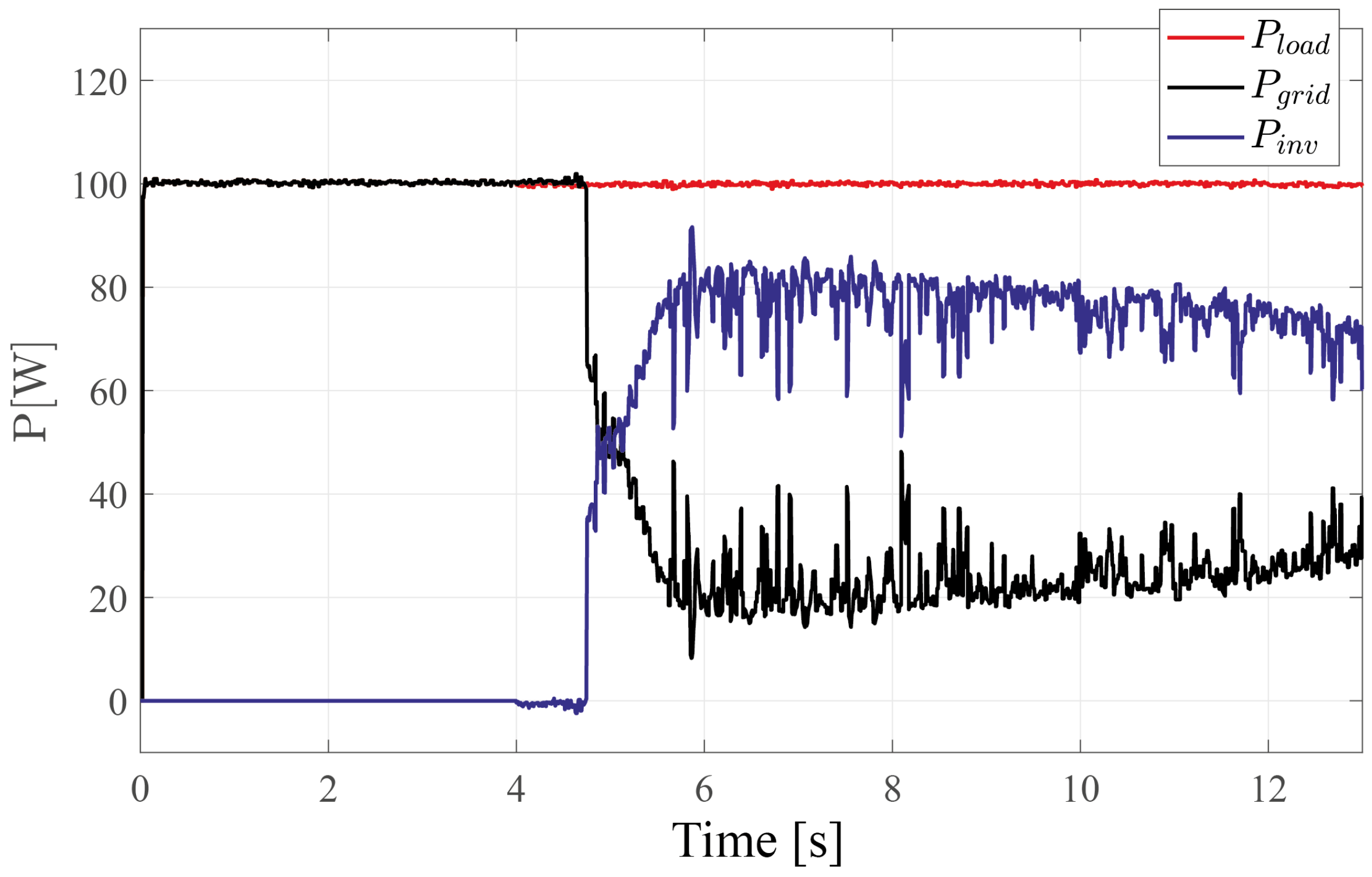
3.1.2. Active Power Regulation
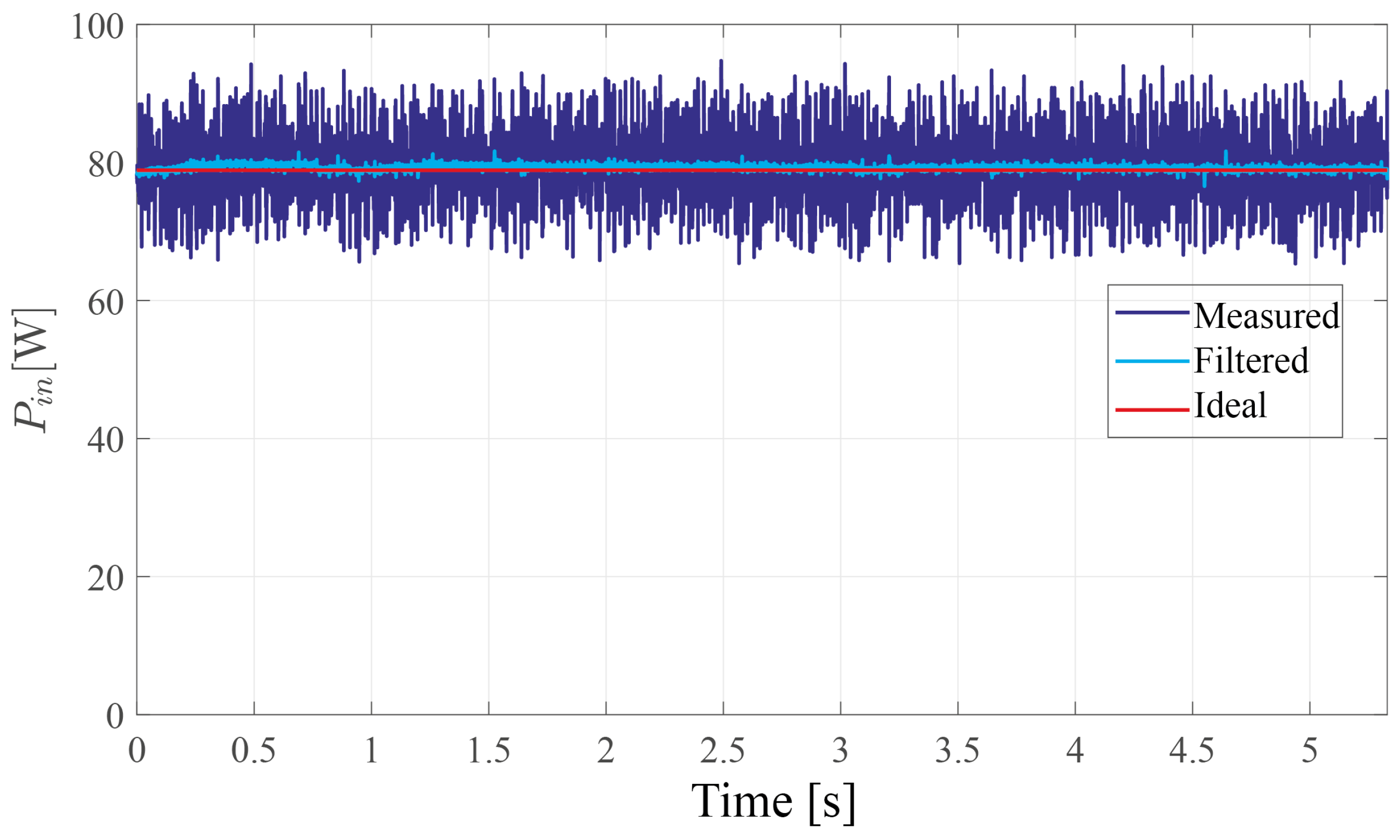
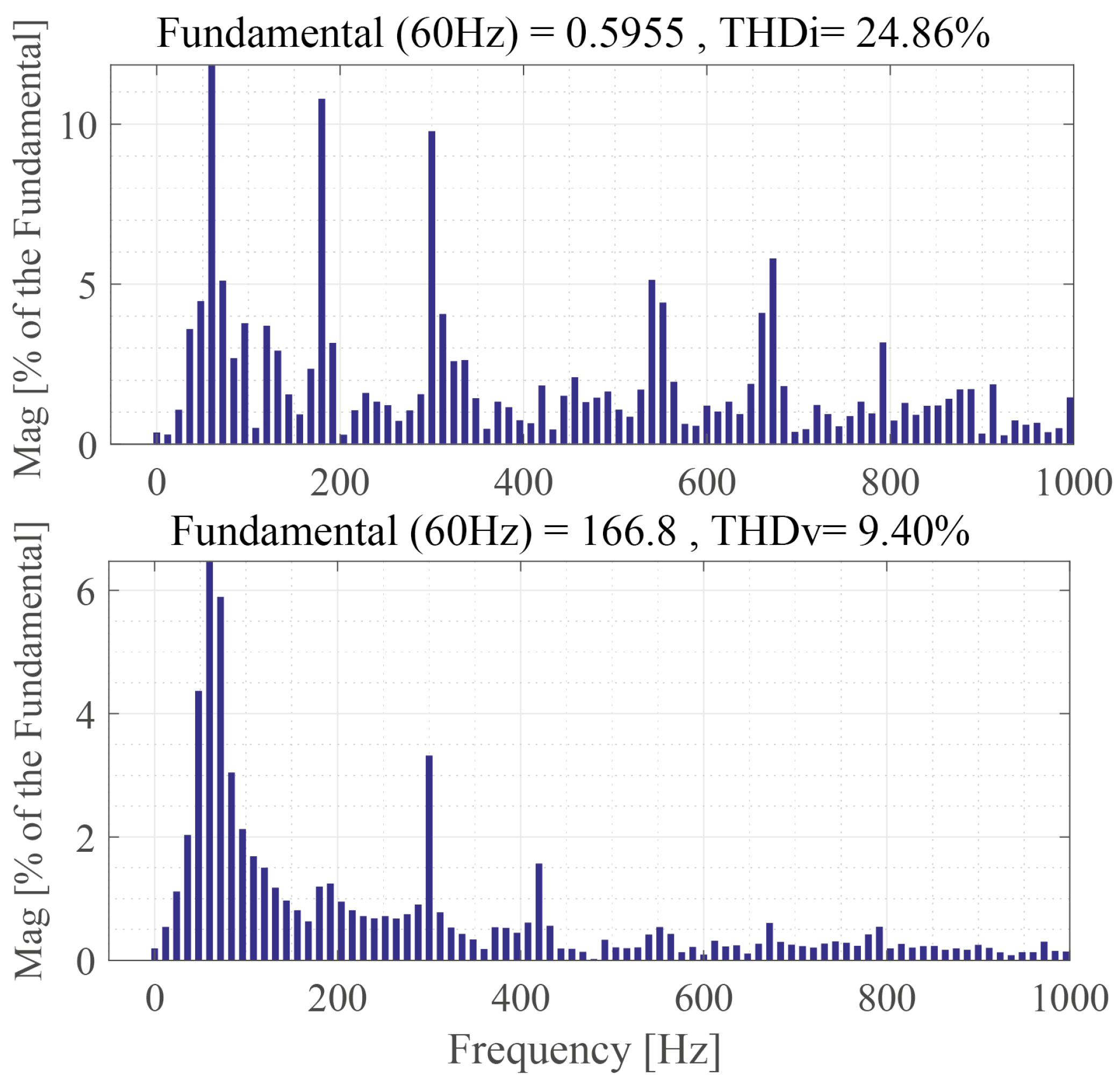
3.2. Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Meng, L.; Savaghebi, M.; Andrade, F.; Vasquez, J.C.; Guerrero, J.M.; Graells, M. Microgrid central controller development and hierarchical control implementation in the intelligent microgrid lab of Aalborg University. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 2585–2592. [Google Scholar] [CrossRef] [Green Version]
- Ortega, R.; García, V.H.; García-García, A.L.; Rodriguez, J.J.; Vásquez, V.; Sosa-Savedra, J.C. Modeling and Application of Controllers for a Photovoltaic Inverter for Operation in a Microgrid. Sustainability 2021, 13, 5115. [Google Scholar] [CrossRef]
- Caporal, M.; Magdaleno, J.J.R.; Cruz Vega, I.; Caporal, R.M. Improved grid-photovoltaic system based on variable-step MPPT, predictive control, and active/reactive control. IEEE Lat. Am. Trans. 2017, 15, 2064–2070. [Google Scholar] [CrossRef]
- Abadlia, I.; Bahi, T.; Lekhchine, S.; Bouzeria, H. Active and reactive power neurocontroller for grid-connected photovoltaic generation system. J. Electr. Syst. 2016, 12, 146–157. [Google Scholar]
- Talha, M.; Raihan, S.; Rahim, N.A. PV inverter with decoupled active and reactive power control to mitigate grid faults. Renew. Energy 2020, 162, 877–892. [Google Scholar] [CrossRef]
- Zeb, K.; Nazir, M.S.; Ahmad, I.; Uddin, W.; Kim, H.J. Control of Transformerless Inverter-Based Two-Stage Grid-Connected Photovoltaic System Using Adaptive-PI and Adaptive Sliding Mode Controllers. Energies 2021, 14, 2546. [Google Scholar] [CrossRef]
- Ishfaq, M.; Uddin, W.; Zeb, K.; Islam, S.U.; Hussain, S.; Khan, I.; Kim, H.J. Active and Reactive Power Control of Modular Multilevel Converter Using Sliding Mode Controller. In Proceedings of the 2019 2nd International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 30–31 January 2019; pp. 1–5. [Google Scholar] [CrossRef]
- El Aamri, F.; Maker, H.; Mouhsen, A.; Harmouchi, M. A new strategy to control the active and reactive power for single phase grid-connected PV inverter. In Proceedings of the 2015 3rd International Renewable and Sustainable Energy Conference (IRSEC), Marrakech, Morocco, 10–13 December 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Babaie, M.; Mehrasa, M.; Sharifzadeh, M.; Melis, G.; Al-Haddad, K. DQ-Based Radial Basis Function Controller for Single-Phase PEC9 Inverter. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, The Netherlands, 17–19 June 2020; pp. 701–706. [Google Scholar] [CrossRef]
- Andrade, I.; Pena, R.; Blasco-Gimenez, R.; Riedemann, J.; Jara, W.; Pesce, C. An Active/Reactive Power Control Strategy for Renewable Generation Systems. Electronics 2021, 10, 1061. [Google Scholar] [CrossRef]
- Toub, M.; Bijaieh, M.M.; Weaver, W.W.; Robinett, R.D.; Maaroufi, M.; Aniba, G. Droop Control in DQ Coordinates for Fixed Frequency Inverter-Based AC Microgrids. Electronics 2019, 8, 1168. [Google Scholar] [CrossRef] [Green Version]
- Bolaños-Navarrete, M.A.; Osorio, G.; Bastidas-Rodriguez, J.D.; Revelo-Fuelagan, E.J. Computational Model of a Two-stage Microinverter With Flyback Active Clamp and Dual Buck. In Proceedings of the 2019 IEEE 4th Colombian Conference on Automatic Control (CCAC), Medellin, Colombia, 15–18 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Mo, Q.; Chen, M.; Zhang, Z.; Zhang, Y.; Qian, Z. Digitally controlled active clamp interleaved flyback converters for improving efficiency in photovoltaic grid-connected micro-inverter. In Proceedings of the 2012 Twenty-Seventh Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 February 2012; pp. 555–562. [Google Scholar] [CrossRef]
- Khan, A.A.; Cha, H.; Lai, J. Cascaded Dual-Buck Inverter With Reduced Number of Inductors. IEEE Trans. Power Electron. 2018, 33, 2847–2856. [Google Scholar] [CrossRef]
- Cho, M.G.; Lee, S.H.; Lee, H.S.; Choi, Y.G.; Kang, B. Circuit Structure and Control Method to Reduce Size and Harmonic Distortion of Interleaved Dual Buck Inverter. Energies 2020, 13, 1531. [Google Scholar] [CrossRef] [Green Version]
- Vera-Dávila, A.G.; Delgado-Ariza, J.C.; Sepúlveda-Mora, S.B. Validación del modelo matemático de un panel solar empleando la herramienta Simulink de Matlab. Rev. Investig. Desarro. Innov. 2018, 8, 343–356. [Google Scholar] [CrossRef] [Green Version]
- Mahmud, M.A.; Pota, H.R.; Hossain, M.J. Nonlinear Current Control Scheme for a Single-Phase Grid-Connected Photovoltaic System. IEEE Trans. Sustain. Energy 2014, 5, 218–227. [Google Scholar] [CrossRef]
- Kazimierczuk, M.K. Pulse-Width Modulated DC-DC Power Converters; John Wiley & Sons: Hoboken, NJ, USA, 2015; pp. 195–241. [Google Scholar]
- Bhardwaj, M.; Choudhury, S. Digitally Controlled Solar Micro Inverter Design using C2000 Piccolo Microcontroller; Texas Instruments Inc.: Dallas, TX, USA, 2017. [Google Scholar]
- Raj, A.S.; Siddeshwar, A.M.; Guruswamy, K.P.; Maheshan, C.M.; Vijay Sanekere, C. Modelling of flyback converter using state space averaging technique. In Proceedings of the 2015 IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT), Bangalore, India, 10–11 July 2015; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- González-Castaño, C.; Lorente-Leyva, L.L.; Muñoz, J.; Restrepo, C.; Peluffo-Ordóñez, D.H. An MPPT Strategy Based on a Surface-Based Polynomial Fitting for Solar Photovoltaic Systems Using Real-Time Hardware. Electronics 2021, 10, 206. [Google Scholar] [CrossRef]
- Alzahrani, A. A Fast and Accurate Maximum Power Point Tracking Approach Based on Neural Network Assisted Fractional Open-Circuit Voltage. Electronics 2020, 9, 2206. [Google Scholar] [CrossRef]
- Jalali Zand, S.; Hsia, K.H.; Eskandarian, N.; Mobayen, S. Improvement of Self-Predictive Incremental Conductance Algorithm with the Ability to Detect Dynamic Conditions. Energies 2021, 14, 1234. [Google Scholar] [CrossRef]
- Islam, H.; Mekhilef, S.; Shah, N.M.; Soon, T.K.; Wahyudie, A.; Ahmed, M. Improved Proportional-Integral Coordinated MPPT Controller with Fast Tracking Speed for Grid-Tied PV Systems under Partially Shaded Conditions. Sustainability 2021, 13, 830. [Google Scholar] [CrossRef]
- Seguel, J.L.; Seleme, S.I. Robust Digital Control Strategy Based on Fuzzy Logic for a Solar Charger of VRLA Batteries. Energies 2021, 14, 1001. [Google Scholar] [CrossRef]
- Bakkar, M.; Aboelhassan, A.; Abdelgeliel, M.; Galea, M. PV Systems Control Using Fuzzy Logic Controller Employing Dynamic Safety Margin under Normal and Partial Shading Conditions. Energies 2021, 14, 841. [Google Scholar] [CrossRef]
- Kumar Chaurasia, M.; Gidwani, L. Analysis of PV module with buck-boost and zeta converters with incremental conductance maximum power point tracking method. In Proceedings of the 2017 International Conference On Smart Technologies For Smart Nation (SmartTechCon), Bengaluru, India, 17–19 August 2017; pp. 1591–1596. [Google Scholar] [CrossRef]
- Ikken, N.; Bouknadel, A.; Haddou, A.; Tariba, N.; El omari, H.; El omari, H. PLL Synchronization Method Based on Second-Order Generalized Integrator for Single Phase Grid Connected Inverters Systems during Grid Abnormalities. In Proceedings of the 2019 International Conference on Wireless Technologies, Embedded and Intelligent Systems (WITS), Fez, Morocco, 3–4 April 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Suyata, T.; Po-Ngam, S. Simplified active power and reactive power control with MPPT for three-phase grid-connected photovoltaic inverters. In Proceedings of the 2014 11th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Nakhon Ratchasima, Thailand, 14–17 May 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Gi-Power New Energy. Polycrystalline Module Models. GP-150P-36; Gi-Power New Energy: Dongguan, China, 2017. [Google Scholar]
- IEEE. IEEE Application Guide for IEEE Std 1547(TM), IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems. IEEE Std 1547.2-2008; IEEE: Piscataway, NJ, USA, 2009; pp. 1–217. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 4 μH | |
| 0.1 μH | |
| 0.632 μH | |
| 9.4 μF | |
| 101.5 μF | |
| 1.5 μF | |
| n | 5.4 |
| 37.4 V | |
| 8.6 A | |
| 275 V | |
| 0.78 |
| Parameter | Value |
|---|---|
| 5.184 mH | |
| 940 μH | |
| 0.93 | |
| 0.26 | |
| 0.2 μF |
| Parameter | Value |
|---|---|
| Maximum power, | 150 W |
| Voltage at maximum power, | 18.7 V |
| Current at maximum power, | 8.02 A |
| Voltage in open circuit, | 22.3 V |
| Short-circuit current, | 8.51 A |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Burbano-Benavides, D.S.; Ortiz-Sotelo, O.D.; Revelo-Fuelagán, J.; Candelo-Becerra, J.E. Design of an On-Grid Microinverter Control Technique for Managing Active and Reactive Power in a Microgrid. Appl. Sci. 2021, 11, 4765. https://doi.org/10.3390/app11114765
Burbano-Benavides DS, Ortiz-Sotelo OD, Revelo-Fuelagán J, Candelo-Becerra JE. Design of an On-Grid Microinverter Control Technique for Managing Active and Reactive Power in a Microgrid. Applied Sciences. 2021; 11(11):4765. https://doi.org/10.3390/app11114765
Chicago/Turabian StyleBurbano-Benavides, Donovan Steven, Oscar David Ortiz-Sotelo, Javier Revelo-Fuelagán, and John E. Candelo-Becerra. 2021. "Design of an On-Grid Microinverter Control Technique for Managing Active and Reactive Power in a Microgrid" Applied Sciences 11, no. 11: 4765. https://doi.org/10.3390/app11114765