A Survey on Robotic Technologies for Forest Firefighting: Applying Drone Swarms to Improve Firefighters’ Efficiency and Safety



Abstract
1. Introduction
- What are the main problems in current forest firefighting missions?
- How can robotic technologies contribute to solving them?
2. Firefighting State
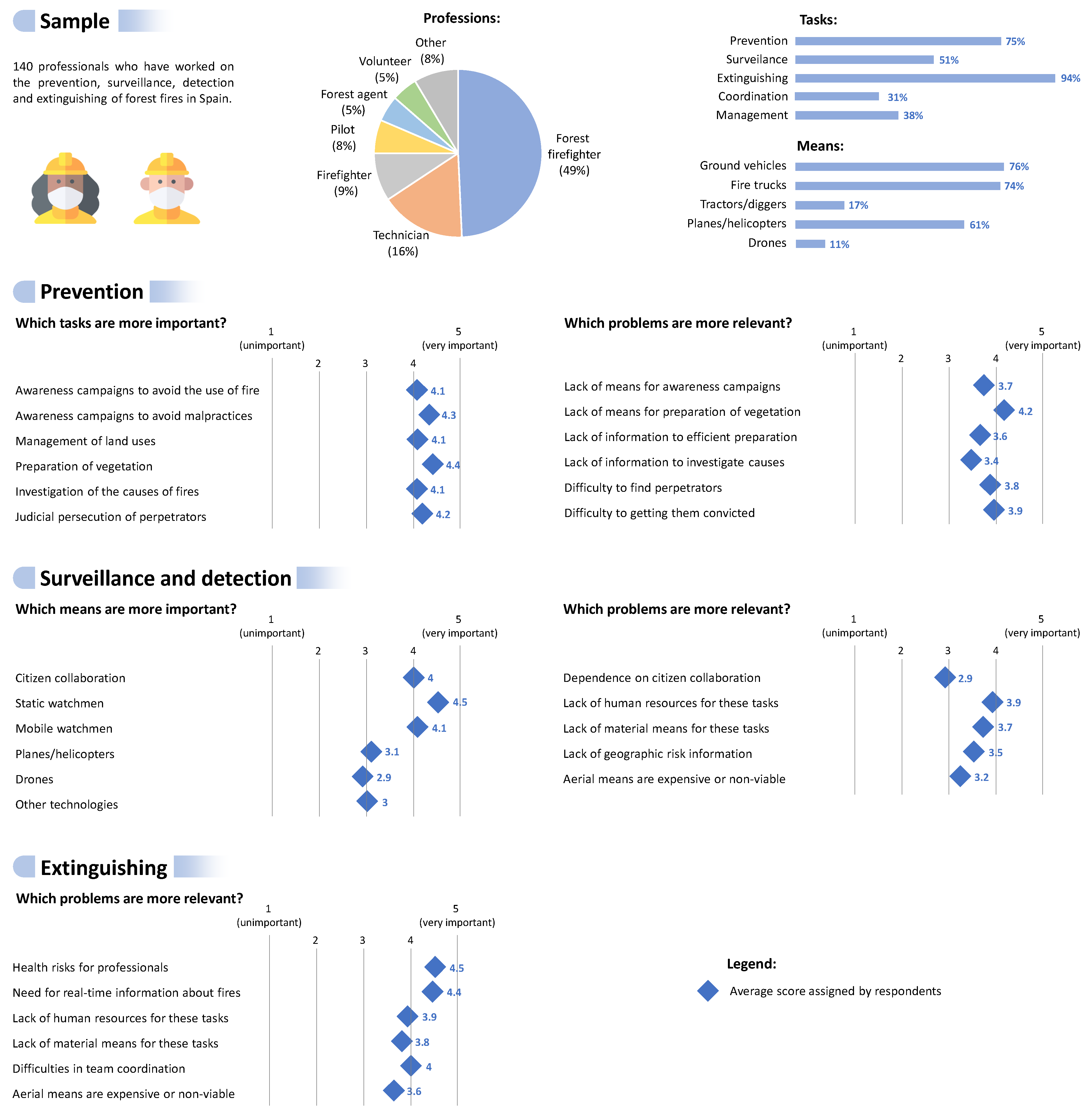
2.1. Problem Survey
- Importance of prevention tasks: As previously mentioned, there are two prevention strategies: those focused on causes and those centered on combustibles. This question seeks the importance that professionals give to each one of these strategies.
- Problems in prevention tasks: This question seeks to find the most relevant problems in current prevention activities, according to the opinions of firefighters.
- Importance of surveillance means: As previously pointed out, forest fires can be detected by citizen collaboration, ground watchmen, and aerial means. This question seeks the importance that professionals give to each one of these means.
- Problems in surveillance tasks: This question seeks to find the most relevant problems in current surveillance activities, according to the opinions of firefighters.
- Problems in extinguishing tasks: This question seeks to find the most relevant problems in current extinguishing activities, according to the opinions of firefighters.
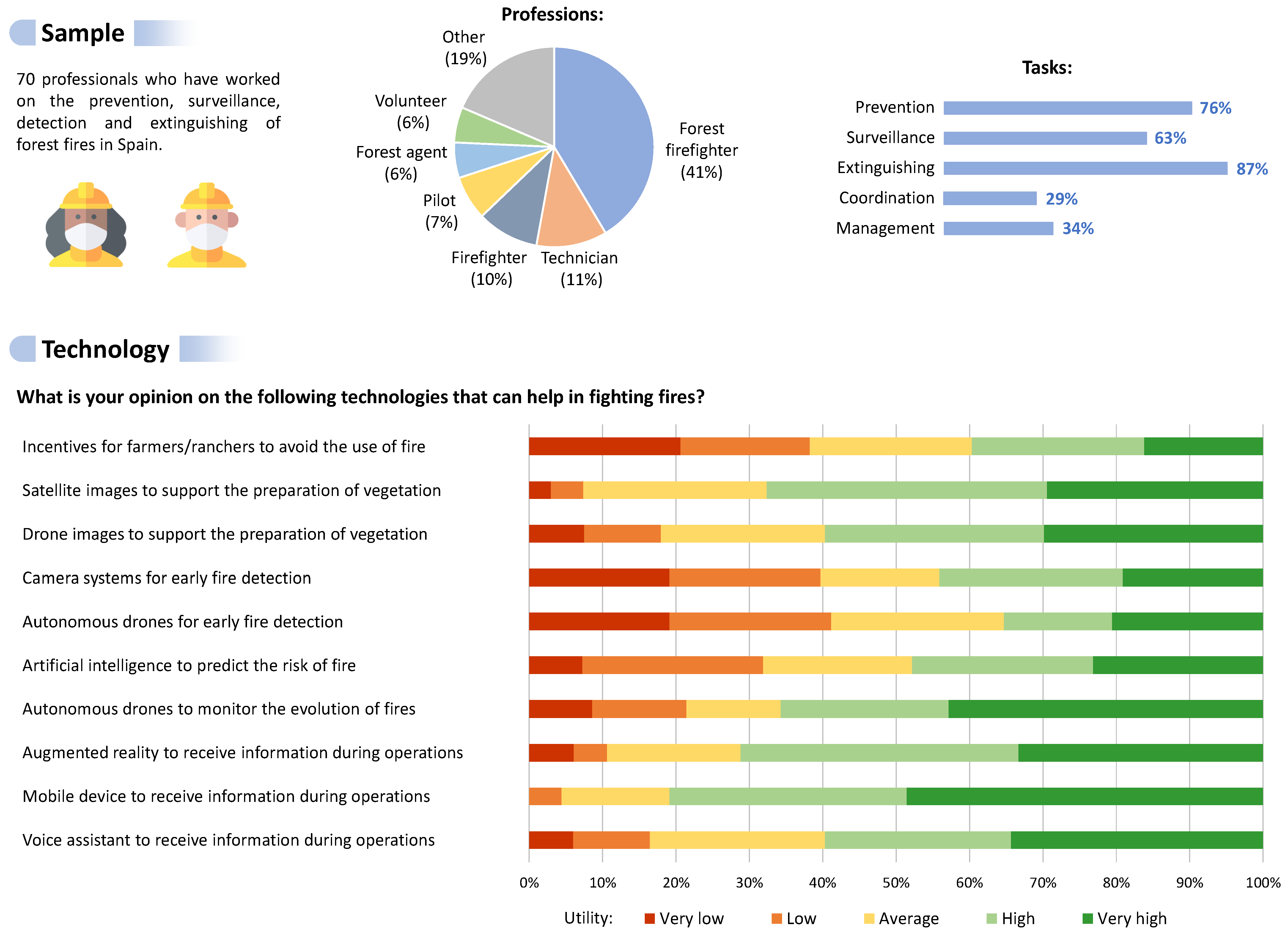
2.2. Technology Survey
- Prevention: The survey considers a solution of prevention on causes (incentive systems for farmers/ranchers to prevent their use of fire) and two solutions of prevention on combustibles (drone and satellite images to support the preparation of vegetation). In this way, two comparisons can be performed: one among the two strategies for prevention, and another between the two technologies that support the vegetation preparation.
- Surveillance: The survey considers two detection systems: one with drones and another with fixed cameras. In this way, the target technology can be compared with a well-known and widely-used surveillance system. Additionally, it includes the use of artificial intelligence to predict the risk of fire, which allows performing this task over specific areas.
- Extinguishing: The survey asks about the application of drones to monitor the evolution of fires. In addition, it considers three alternatives to receive the information during field operations: an immersive interface, a mobile device, and a voice assistant. In this way, the target technology can be compared to two common methods to receive information.
3. Firefighting Robots
3.1. Prevention
3.2. Surveillance
3.3. Extinguishing
4. System Overview
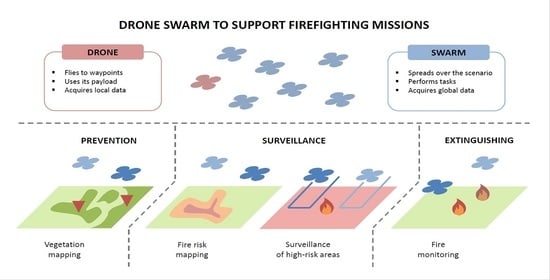
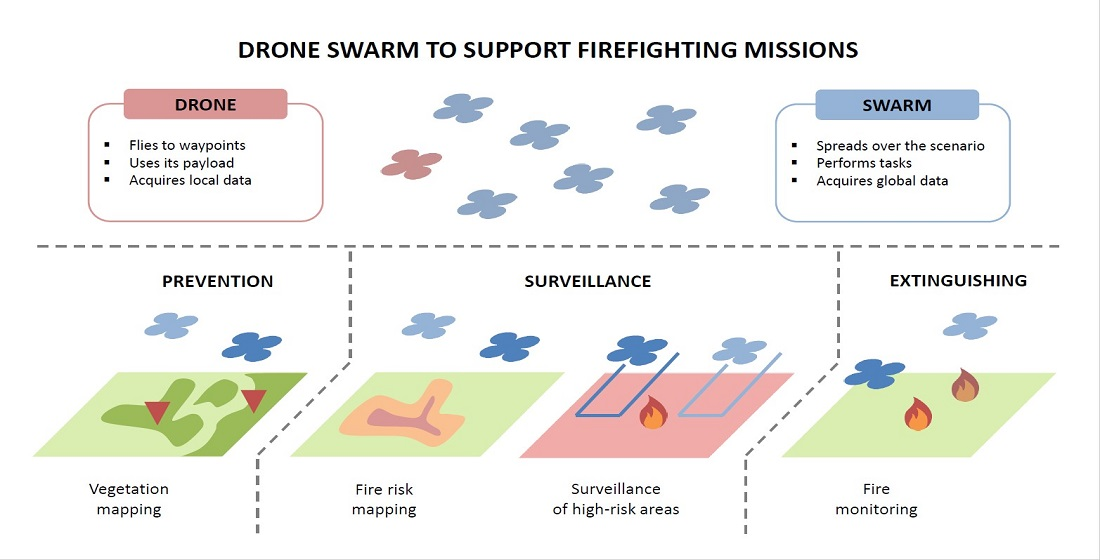
4.1. Mission
- Prevention: This phase groups the tasks that seek to avoid fires from occurring and control their spread.Vegetation mapping: In this task, the drones fly over an area of interest to take ground pictures and build a vegetation map. The number of drones, flight pattern and altitude, and other variables can be tuned to efficiently cover the area and obtain high-quality images. The drones must integrate conventional and multispectral cameras to perform this task. The base station processes images, build a mosaic, detect trees and plants, and recommend actions to the firefighters.Fire investigation: This task is developed after the fire is detected. The objective is to find evidence to identify and pursue the perpetrators of the fire. For this purpose, the drones must search around the fire to detect suspicious people, objects, and situations, monitoring static targets, and tracking mobile targets. Although this task is performed after the fire has occurred and the drones have detected it, it is considered a prevention task because it can prevent the occurrence of more outbreaks of the fire. In practice, few drones can perform this task while the rest are carrying out extinguishing tasks.
- Surveillance: This phase considers the tasks that seek to detect fires and alarm firefighting teams early.Risk mapping: This task is very similar to vegetation mapping, but creating a map with the risk of fire. This map is useful to know in which areas there is more probability of fire and reinforce surveillance over them. The drones must be equipped with conventional and thermal cameras to perform this task.Fire surveillance: In this task, the drones fly over an area of interest looking for potential fires. When one of the drones detects a possible fire, this or another drone must fly closer to check it. For this purpose, the drones must integrate conventional and thermal cameras, as well as environmental sensors: temperature, humidity, and concentrations of combustion gases.
- Extinguishing: This phase groups the task aimed at extinguishing fires and supporting firefighters.Fire monitoring: This task is performed to collect information about the fire while the teams on the ground extinguish it. Spatial and temporal information is useful to know the outline of the fire, locate new sources, and predict its evolution. For this purpose, the drones must fly around the fire to incorporate new information from the periphery while keeping updated information from the center. This task needs the same equipment in the drones as risk mapping and fire surveillance.Firefighter support: This task aims at supporting the firefighters that are working on the ground to extinguish the fire. For this purpose, the drones must fly around the firefighting teams to collect data about their surroundings and recommend them safe paths and effective actions. Additionally, the drones can transport light resources to firefighters, such as communication devices and protection equipment.
4.2. Drone Swarm
- Size and weight: No more than 1600 × 1600 × 800 mm unfolded and 15 kg including drone and payload.
- Autonomy: A minimum of 30 min of flight.
- Navigation: Fusion of IMU measurements, visual odometry and GPS/GLONASS/ GALILEO signal.
- Control: Capability of reaching and hovering on waypoints.
- Communications: Telemetry and video links in a range of 5 km.
- Payload: Conventional, thermal, and multispectral cameras, as well as temperature, humidity, and gas sensors.
- Search: This task involves flying over an area of interest to find some targets, covering every point in that area at least once.
- Surveillance: This task involves flying over an area of interest to find some targets, covering every point multiple times to get updated data.
- Reconnaissance: This task involves flying to a list of points of interest to acquire data.
- Mapping: This task involves flying over an area of interest to build a map, covering every point once to acquire images or data.
- Monitoring: This task involves flying over an event of interest to acquire data.
- Support: This task involves flying over teams that work on the ground to provide them with information about their environment.
- Tracking: This task involves following a mobile target to acquire information or control it.
- Transport: This task involves taking a load from one point to another.
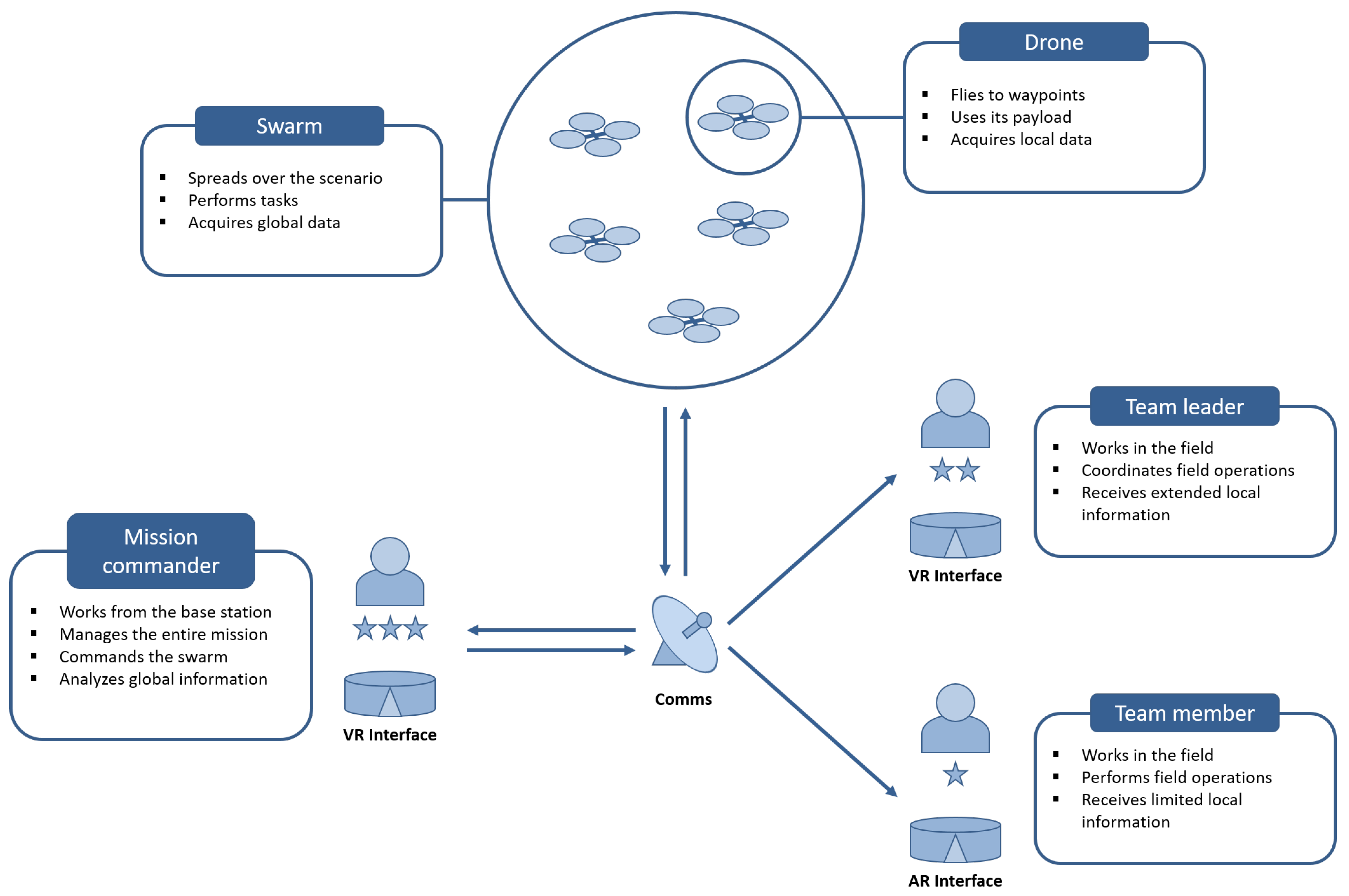
4.3. Team
- Mission commander: They monitor and controls the mission from the base station, which does not have to be in the fire scenario. All the data collected by the drones is received in the base station and processed to obtain valuable information. Therefore, the mission commander has access to full information on the mission, including the telemetries of drones and measurements on the fire. They must use this information to manage the mission, coordinating the teams on the ground and commanding the swarm. The drone swarm is controlled through high-level commands (e.g., defining areas of interest, variables that must be measured, and required tasks) instead of through low-level orders (e.g., sending specific waypoints and actions to specific drones). This feature is one of the most remarkable strengths of robot swarms, which can self configure to accomplish tasks most accurately, efficiently, and safely. Finally, the mission commander communicates with the team leaders to deliver high-level orders for their teams, establishing the areas where they must work, the tasks that they must perform, and the resources that they can use.
- Team leader: They work in the fire scenario, preferably in a facility or vehicle to ensure communications with the base station. The task of a team leader is to coordinate the field operations of a firefighting team. For this purpose, they receive high-level orders from the mission commander (e.g., area of work and tasks to be performed) and sends low-level commands to the team (e.g., move along a path and attack some flames). In this role, local information is managed both geographically and functionally, that is, the events that happen in the work area and affect the performed tasks.
- Team members: They work in the fire scenario, executing prevention, surveillance, and extinguishing tasks. For this purpose, they can exercise their workforce or use different types of vehicles and machinery. They have access to limited local information, mainly related to the paths that must follow and the actions that must perform. The amount of information should be limited to avoid distractions, but should be enough to ensure their safety.
4.4. Infrastructure
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AR | Augmented Reality |
| ESA | European Space Agency |
| GCS | Ground Control Station |
| GLONASS | Global’naya Navigatsionnaya Sputnikovaya Sistema |
| GNC | Guidance, Navigation and Control |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| IMU | Inertial Measurement Unit |
| LIDAR | Light Detection and Ranging |
| MR | Mixed Reality |
| MRS | Multi-Robot System |
| MVP | Minimum Viable Product |
| NASA | National Aeronautics and Space Administration |
| UAV | Unmanned Aerial Vehicle |
| UGV | Unmanned Ground Vehicle |
| VR | Virtual Reality |
References
- Brushlinsky, N.; Ahrens, M.; Sokolov, S.; Wagner, P. World Fire Statistics; Technical Report 23; Center of Fire Statistics: Moscow, Russia, 2018. [Google Scholar]
- Mota, B.; Pereira, J.; Oom, D.; Vasconcelos, M.; Schultz, M. Screening the ESA ATSR-2 World Fire Atlas (1997-2002). Atmos. Chem. Phys. 2006. [Google Scholar] [CrossRef]
- Xu, W.; Wooster, M.J.; He, J.; Zhang, T. First study of Sentinel-3 SLSTR active fire detection and FRP retrieval: Night-time algorithm enhancements and global intercomparison to MODIS and VIIRS AF products. Remote Sens. Environ. 2020, 248, 111947. [Google Scholar] [CrossRef]
- Andela, N.; Morton, D.C.; Giglio, L.; Paugam, R.; Chen, Y.; Hantson, S.; Van Der Werf, G.R.; Randerson, J.T. The Global Fire Atlas of individual fire size, duration, speed and direction. Earth Syst. Sci. Data 2019, 11, 529–552. [Google Scholar] [CrossRef]
- Los Incendios Forestales en España: Avance Informativo 2019. Technical report, Área de Defensa contra Incendios Forestales, Ministerio para la Transición Ecológica y el Reto Demográfico, Gobierno de España. 2020. Available online: https://www.mapa.gob.es/es/desarrollo-rural/estadisticas/avance_1_enero_31_diciembre_2019_tcm30-537398.pdf (accessed on 31 December 2020).
- Los Incendios Forestales en España: Decenio 2006–2015. Technical report, Área de Defensa contra Incendios Forestales, Ministerio de Agricultura, Pesca y Alimentación, Gobierno de España. 2019. Available online: https://www.mapa.gob.es/es/desarrollo-rural/estadisticas/incendios-decenio-2006-2015_tcm30-511095.pdf (accessed on 31 December 2020).
- Muñoz, R.V. La Defensa Contra Incendios Forestales: Fundamentos y Experiencias; McGraw-Hill Interamericana de España: Madrid, Spain, 2009. [Google Scholar]
- Russell, M.T. Fire Chief Perception of Unmanned Aircraft Systems: A Diffusion Study; New Jersey City University: Jersey City, NJ, USA, 2016. [Google Scholar]
- MacSween, S. A public opinion survey-unmanned aerial vehicles for cargo, commercial, and passenger transportation. In Proceedings of the 2nd AIAA“ Unmanned Unlimited” Conference and Workshop & Exhibit, San Diego, CA, USA, 15–18 September 2003; p. 6519. [Google Scholar]
- Aydin, B. Public acceptance of drones: Knowledge, attitudes, and practice. Technol. Soc. 2019, 59, 101180. [Google Scholar] [CrossRef]
- Ghamry, K.A.; Kamel, M.A.; Zhang, Y. Multiple UAVs in forest fire fighting mission using particle swarm optimization. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1404–1409. [Google Scholar]
- Roldán, J.J.; del Cerro, J.; Garzón-Ramos, D.; Garcia-Aunon, P.; Garzón, M.; de León, J.; Barrientos, A. Robots in agriculture: State of art and practical experiences. Serv. Robot. 2018. [Google Scholar] [CrossRef]
- Valente, J.; Sari, B.; Kooistra, L.; Kramer, H.; Mücher, S. Automated crop plant counting from very high-resolution aerial imagery. Precis. Agric. 2020, 21, 1366–1384. [Google Scholar] [CrossRef]
- Anders, N.; Valente, J.; Masselink, R.; Keesstra, S. Comparing Filtering Techniques for Removing Vegetation from UAV-Based Photogrammetric Point Clouds. Drones 2019, 3, 61. [Google Scholar] [CrossRef]
- Zhang, C.; Valente, J.; Kooistra, L.; Guo, L.; Wang, W. Opportunities of uavs in orchard management. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2019. [Google Scholar] [CrossRef]
- Barrientos, A.; Colorado, J.; Cerro, J.d.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial remote sensing in agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots. J. Field Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef]
- Bergerman, M.; Billingsley, J.; Reid, J.; van Henten, E. Robotics in agriculture and forestry. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1463–1492. [Google Scholar]
- Aguiar, A.S.; dos Santos, F.N.; Cunha, J.B.; Sobreira, H.; Sousa, A.J. Localization and Mapping for Robots in Agriculture and Forestry: A Survey. Robotics 2020, 9, 97. [Google Scholar] [CrossRef]
- Couceiro, M.S.; Portugal, D.; Ferreira, J.F.; Rocha, R.P. SEMFIRE: Towards a new generation of forestry maintenance multi-robot systems. In Proceedings of the 2019 IEEE/SICE International Symposium on System Integration (SII), Paris, France, 14–16 January 2019; pp. 270–276. [Google Scholar]
- Yuan, C.; Liu, Z.; Zhang, Y. Fire detection using infrared images for UAV-based forest fire surveillance. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 567–572. [Google Scholar]
- Bouabdellah, K.; Noureddine, H.; Larbi, S. Using wireless sensor networks for reliable forest fires detection. Procedia Comput. Sci. 2013, 19, 794–801. [Google Scholar] [CrossRef]
- Yuan, C.; Liu, Z.; Zhang, Y. Vision-based forest fire detection in aerial images for firefighting using UAVs. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1200–1205. [Google Scholar]
- Yuan, C.; Liu, Z.; Zhang, Y. UAV-based forest fire detection and tracking using image processing techniques. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 639–643. [Google Scholar]
- Allauddin, M.S.; Kiran, G.S.; Kiran, G.R.; Srinivas, G.; Mouli, G.U.R.; Prasad, P.V. Development of a Surveillance System for Forest Fire Detection and Monitoring using Drones. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 9361–9363. [Google Scholar]
- Barmpoutis, P.; Papaioannou, P.; Dimitropoulos, K.; Grammalidis, N. A Review on Early Forest Fire Detection Systems Using Optical Remote Sensing. Sensors 2020, 20, 6442. [Google Scholar] [CrossRef] [PubMed]
- Dang-Ngoc, H.; Nguyen-Trung, H. Aerial Forest Fire Surveillance-Evaluation of Forest Fire Detection Model using Aerial Videos. In Proceedings of the 2019 International Conference on Advanced Technologies for Communications (ATC), Hanoi, Vietnam, 17–19 October 2019; pp. 142–148. [Google Scholar]
- Barmpoutis, P.; Stathaki, T.; Dimitropoulos, K.; Grammalidis, N. Early fire detection based on aerial 360-degree sensors, deep convolution neural networks and exploitation of fire dynamic textures. Remote Sens. 2020, 12, 3177. [Google Scholar] [CrossRef]
- Valero, M.; Rios, O.; Pastor, E.; Planas, E. Automated location of active fire perimeters in aerial infrared imaging using unsupervised edge detectors. Int. J. Wildland Fire 2018, 27, 241–256. [Google Scholar] [CrossRef]
- Bosch, I.; Serrano, A.; Vergara, L. Multisensor network system for wildfire detection using infrared image processing. Sci. World J. 2013, 2013, 402196. [Google Scholar] [CrossRef] [PubMed]
- Veraverbeke, S.; Dennison, P.; Gitas, I.; Hulley, G.; Kalashnikova, O.; Katagis, T.; Kuai, L.; Meng, R.; Roberts, D.; Stavros, N. Hyperspectral remote sensing of fire: State-of-the-art and future perspectives. Remote Sens. Environ. 2018, 216, 105–121. [Google Scholar] [CrossRef]
- Carvajal-Ramírez, F.; Marques da Silva, J.R.; Agüera-Vega, F.; Martínez-Carricondo, P.; Serrano, J.; Moral, F.J. Evaluation of fire severity indices based on pre-and post-fire multispectral imagery sensed from UAV. Remote Sens. 2019, 11, 993. [Google Scholar] [CrossRef]
- Martínez-de Dios, J.R.; Merino, L.; Ollero, A. Fire detection using autonomous aerial vehicles with infrared and visual cameras. IFAC Proc. Vol. 2005, 38, 660–665. [Google Scholar] [CrossRef]
- Fonollosa, J.; Solórzano, A.; Marco, S. Chemical sensor systems and associated algorithms for fire detection: A review. Sensors 2018, 18, 553. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, B.; Peng, W.; Li, C.; Lu, Z.; Guo, Y. Forest fire detection solution based on UAV aerial data. Int. J. Smart Home 2015, 9, 239–250. [Google Scholar] [CrossRef]
- Kinaneva, D.; Hristov, G.; Raychev, J.; Zahariev, P. Early forest fire detection using drones and artificial intelligence. In Proceedings of the 2019 42nd International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 20–24 May 2019; pp. 1060–1065. [Google Scholar]
- Jiao, Z.; Zhang, Y.; Xin, J.; Mu, L.; Yi, Y.; Liu, H.; Liu, D. A Deep Learning Based Forest Fire Detection Approach Using UAV and YOLOv3. In Proceedings of the 2019 1st International Conference on Industrial Artificial Intelligence (IAI), Shenyang, China, 23–27 July 2019; pp. 1–5. [Google Scholar]
- Burke, C.; Wich, S.; Kusin, K.; McAree, O.; Harrison, M.E.; Ripoll, B.; Ermiasi, Y.; Mulero-Pázmány, M.; Longmore, S. Thermal-Drones as a Safe and Reliable Method for Detecting Subterranean Peat Fires. Drones 2019, 3, 23. [Google Scholar] [CrossRef]
- Ghamry, K.A.; Kamel, M.A.; Zhang, Y. Cooperative forest monitoring and fire detection using a team of UAVs-UGVs. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1206–1211. [Google Scholar]
- Sudhakar, S.; Vijayakumar, V.; Kumar, C.S.; Priya, V.; Ravi, L.; Subramaniyaswamy, V. Unmanned Aerial Vehicle (UAV) based Forest Fire Detection and monitoring for reducing false alarms in forest-fires. Comput. Commun. 2020, 149, 1–16. [Google Scholar] [CrossRef]
- Qin, H.; Cui, J.Q.; Li, J.; Bi, Y.; Lan, M.; Shan, M.; Liu, W.; Wang, K.; Lin, F.; Zhang, Y.; et al. Design and implementation of an unmanned aerial vehicle for autonomous firefighting missions. In Proceedings of the 2016 12th IEEE International Conference on Control and Automation (ICCA), Kathmandu, Nepal, 1–3 June 2016; pp. 62–67. [Google Scholar]
- Ando, H.; Ambe, Y.; Ishii, A.; Konyo, M.; Tadakuma, K.; Maruyama, S.; Tadokoro, S. Aerial hose type robot by water jet for fire fighting. IEEE Robot. Autom. Lett. 2018, 3, 1128–1135. [Google Scholar] [CrossRef]
- Ogawa, S.; Kudo, S.; Koide, M.; Torikai, H.; Iwatani, Y. Development and control of an aerial extinguisher with an inert gas capsule. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; pp. 1320–1325. [Google Scholar]
- Aydin, B.; Selvi, E.; Tao, J.; Starek, M.J. Use of fire-extinguishing balls for a conceptual system of drone-assisted wildfire fighting. Drones 2019, 3, 17. [Google Scholar] [CrossRef]
- Alshbatat, A.I.N. Fire extinguishing system for high-rise buildings and rugged mountainous terrains utilizing quadrotor unmanned aerial vehicle. Int. J. Image, Graph. Signal Process. 2018, 12, 23. [Google Scholar] [CrossRef]
- Soliman, A.M.S.; Cagan, S.C.; Buldum, B.B. The design of a rotary-wing unmanned aerial vehicles–payload drop mechanism for fire-fighting services using fire-extinguishing balls. SN Appl. Sci. 2019, 1, 1259. [Google Scholar] [CrossRef]
- Manimaraboopathy, M.; Christopher, H.; Vignesh, S. Unmanned Fire Extinguisher Using Quadcopter. Int. J. Smart Sens. Intell. Syst. 2017, 10, 471–481. [Google Scholar] [CrossRef]
- Sherstjuk, V.; Zharikova, M.; Sokol, I. Forest Fire Fighting Using Heterogeneous Ensemble of Unmanned Aerial Vehicles. In Proceedings of the 2019 IEEE 5th International Conference Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD), Kiev, Ukraine, 22–24 October 2019; pp. 218–223. [Google Scholar]
- Islam, S.; Razi, A. A path planning algorithm for collective monitoring using autonomous drones. In Proceedings of the 2019 53rd Annual Conference on Information Sciences and Systems (CISS), Baltimore, MD, USA, 20–22 March 2019; pp. 1–6. [Google Scholar]
- Innocente, M.S.; Grasso, P. Self-organising swarms of firefighting drones: Harnessing the power of collective intelligence in decentralised multi-robot systems. J. Comput. Sci. 2019, 34, 80–101. [Google Scholar] [CrossRef]
- Haksar, R.N.; Schwager, M. Distributed deep reinforcement learning for fighting forest fires with a network of aerial robots. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1067–1074. [Google Scholar]
- Seraj, E.; Silva, A.; Gombolay, M. Safe Coordination of Human-Robot Firefighting Teams. arXiv 2019, arXiv:1903.06847. [Google Scholar]
- Sherstjuk, V.; Zharikova, M.; Sokol, I. Forest fire-fighting monitoring system based on uav team and remote sensing. In Proceedings of the 2018 IEEE 38th International Conference on Electronics and Nanotechnology (ELNANO), Kiev, Ukraine, 24–26 April 2018; pp. 663–668. [Google Scholar]
- Garcia-Aunon, P.; Roldán, J.J.; Barrientos, A. Monitoring traffic in future cities with aerial swarms: Developing and optimizing a behavior-based surveillance algorithm. Cogn. Syst. Res. 2019, 54, 273–286. [Google Scholar] [CrossRef]
- Al-Turjman, F. A novel approach for drones positioning in mission critical applications. Trans. Emerg. Telecommun. Technol. 2019, e3603. [Google Scholar] [CrossRef]
- Wang, L.; Sanchez-Matilla, R.; Cavallaro, A. Tracking a moving sound source from a multi-rotor drone. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2511–2516. [Google Scholar]
- Garcia-Aunon, P.; Barrientos Cruz, A. Comparison of heuristic algorithms in discrete search and surveillance tasks using aerial swarms. Appl. Sci. 2018, 8, 711. [Google Scholar] [CrossRef]
- Roldán-Gómez, J.J.; Garcia-Aunon, P.; Mazariegos, P.; Barrientos, A. SwarmCity project: Monitoring traffic, pedestrians, climate, and pollution with an aerial robotic swarm. Pers. Ubiquitous Comput. 2020, 1–17. [Google Scholar] [CrossRef]
- Roldán, J.J.; del Cerro, J.; Barrientos, A. A proposal of methodology for multi-UAV mission modeling. In Proceedings of the 2015 23rd Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain, 16–19 June 2015; pp. 1–7. [Google Scholar]
- Roldán, J.J.; Peña-Tapia, E.; Auñón, P.G.; Del Cerro, J.; Barrientos, A. Bringing Adaptive and Immersive Interfaces to Real-World Multi-Robot Scenarios: Application to Surveillance and Intervention in Infrastructures. IEEE Access 2019, 7, 86319–86335. [Google Scholar] [CrossRef]
- Martín-Barrio, A.; Roldán, J.J.; Terrile, S.; del Cerro, J.; Barrientos, A. Application of immersive technologies and natural language to hyper-redundant robot teleoperation. Virtual Real. 2019, 24, 541–555. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Missions | Specific Tasks | Generic Tasks |
|---|---|---|
| Prevention | Vegetation mapping | Mapping |
| Fire investigation | Search, Monitoring, Tracking | |
| Surveillance | Risk mapping | Mapping |
| Fire surveillance | Surveillance, Reconnaissance | |
| Extinguishing | Fire monitoring | Monitoring, Search |
| Firefighter support | Support, Transport |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roldán-Gómez, J.J.; González-Gironda, E.; Barrientos, A. A Survey on Robotic Technologies for Forest Firefighting: Applying Drone Swarms to Improve Firefighters’ Efficiency and Safety. Appl. Sci. 2021, 11, 363. https://doi.org/10.3390/app11010363
Roldán-Gómez JJ, González-Gironda E, Barrientos A. A Survey on Robotic Technologies for Forest Firefighting: Applying Drone Swarms to Improve Firefighters’ Efficiency and Safety. Applied Sciences. 2021; 11(1):363. https://doi.org/10.3390/app11010363
Chicago/Turabian StyleRoldán-Gómez, Juan Jesús, Eduardo González-Gironda, and Antonio Barrientos. 2021. "A Survey on Robotic Technologies for Forest Firefighting: Applying Drone Swarms to Improve Firefighters’ Efficiency and Safety" Applied Sciences 11, no. 1: 363. https://doi.org/10.3390/app11010363
APA StyleRoldán-Gómez, J. J., González-Gironda, E., & Barrientos, A. (2021). A Survey on Robotic Technologies for Forest Firefighting: Applying Drone Swarms to Improve Firefighters’ Efficiency and Safety. Applied Sciences, 11(1), 363. https://doi.org/10.3390/app11010363