1. Introduction
Separation of solid particles suspended in liquids is a fundamental operation in the treatment of wastewater. This process generally consists of a sequence of steps, namely, coagulation and flocculation, followed by sedimentation [
1]. The first operation aims at destabilizing the suspension through the addition of coagulants that neutralize the negative charges on fine solids. The small destabilized particles are able to come into contact and form larger particles called microflocs. In the flocculation step, the microflocs collide and stick together forming larger and larger particles (macroflocs). Once the suspended aggregates have reached a desired dimension, the suspension undergoes the sedimentation step, i.e., the particles are separated from the liquid through gravity or centrifugal force [
2].
The knowledge of the hydrodynamic drag force, which counterbalances the sedimentation force, is crucial to the design and optimization of wastewater treatment plants. Such a force depends on the size and shape of the suspended particles, and on the rheological properties of the liquid. During the flocculation stage, the aggregates assume fractal shapes [
3,
4,
5,
6] described by the following equation [
7],
where
is the number of primary particles forming the aggregate,
is the radius of gyration,
is the fractal dimension,
is the fractal pre-factor, and
a is the radius of the primary particles. Aggregates with a shape satisfying Equation (
1) are referred to as fractal-like or quasi-fractal aggregates, as the scaling law relation is independent of whether the particle has a real scale-invariant (self-similar) morphology [
8]. The fractal dimension provides a scaling law between the number of primary particles composing the aggregate and a characteristic cluster size (e.g., the gyration radius). It assumes values between 1 and 3 corresponding to rod-like and spherical-like particles, respectively. The fractal prefactor is a descriptor of the aggregate local structure and is related to the packing factor. Finally, the radius of gyration is a geometric measure of the spatial mass distribution about the aggregate center of mass.
The particle morphology has a relevant influence on the settling velocity, and thus it must be accounted for when dealing with the sedimentation process of flocculated particles [
9,
10]. Therefore, it is not surprising that the hydrodynamic drag of particles with complex shapes has been thoroughly studied in the literature. Several methodologies have been proposed to compute the hydrodynamic drag of a set of spherical particles in contact, based on expansions of analytical solutions for Stokes flows [
11,
12,
13] or direct numerical simulations [
14,
15,
16]. Due to the linearity of the creeping flow equations, the dynamics of a particle with arbitrary shape can be determined by the mobility tensor that univocally relates translational and angular velocities to the forces and torques acting on the particle [
17]. The knowledge of the mobility tensor allows to completely predict the translational and orientational motion of the aggregate. In this regards, it is well known that the settling velocity depends on the aggregate orientation. The average velocity over all possible orientations can be linearly related to the applied force, with a proportionality constant given by the arithmetic mean of the three eigenvalues of the translational mobility tensor divided by the fluid viscosity [
13,
18,
19]. A hydrodynamic radius can be defined as the radius of a sphere that gives the same drag force acting on the aggregate in a uniform flow [
13]. It can be readily seen that the hydrodynamic radius is inversely proportional to the aforementioned mean of the eigenvalues of the translational mobility tensor. The knowledge of the hydrodynamic radius for an aggregate with arbitrary shape is, then, sufficient to characterize its average settling velocity. The ratio of the hydrodynamic radius and the gyration radius has been found to be a function of the parameters of the fractal Equation (
1) [
13,
19,
20]. Specifically, such a ratio is an increasing function of
, assuming a value of ~1 for
, up to a limiting value of about 1.29 for
[
13,
15,
20]. The number of primary particles strongly affects the ratio for low fractal dimensions (rod-like particles), whereas it has a weak influence for more spherical aggregates. Finally, increasing the fractal pre-factor moves the ratio to higher values without altering the dependence on
and
[
13].
All the aforementioned studies consider a Newtonian suspending liquid. In addition, the developed methodologies used to compute the hydrodynamic drag are only applicable to Newtonian fluids. Active sludges, however, show a non-Newtonian rheology [
21,
22], which has a strong influence on the particle settling dynamics. For a spherical particle in an unbounded shear-thinning inelastic fluid, modeled with the power-law constitutive equation, several works are available showing that the drag force deviates from the Stokes’ law [
23,
24,
25,
26]. A drag correction coefficient has been defined as the ratio between the applied force and the Stokes’ drag law, where the viscosity is replaced by the power-law constitutive equation with a characteristic shear rate given by the terminal settling velocity divided by the particle diameter. The coefficient is 1 for a Newtonian fluid and increases as the flow index decreases (i.e., fluid shear-thinning increases). For non-spherical particles, Tripathi et al. [
27] carried out finite element simulations to study the flow of a power-law fluid over prolate and oblate spheroidal particles aligned with the flow direction. In this particular orientation, the dependence of the total drag coefficient on the flow index was found to be qualitatively similar to that observed for spherical particles. As the aspect ratio of the prolate spheroid increases, the drag becomes relatively insensitive to the degree of shear-thinning. Oblate spheroids with high aspect ratio experience a lower drag as compared to spheres.
In summary, many works exist dealing with drag calculation of particles with non-spherical shape in Newtonian liquids. Concerning power-law fluids, the only results available are for spheres [
25] and spheroids [
27], the latter only considering particles oriented with a principal axis along the force direction. To the best of our knowledge, a study on the combined effect of non-Newtonian rheology and complex particle shape on the hydrodynamic drag is missing.
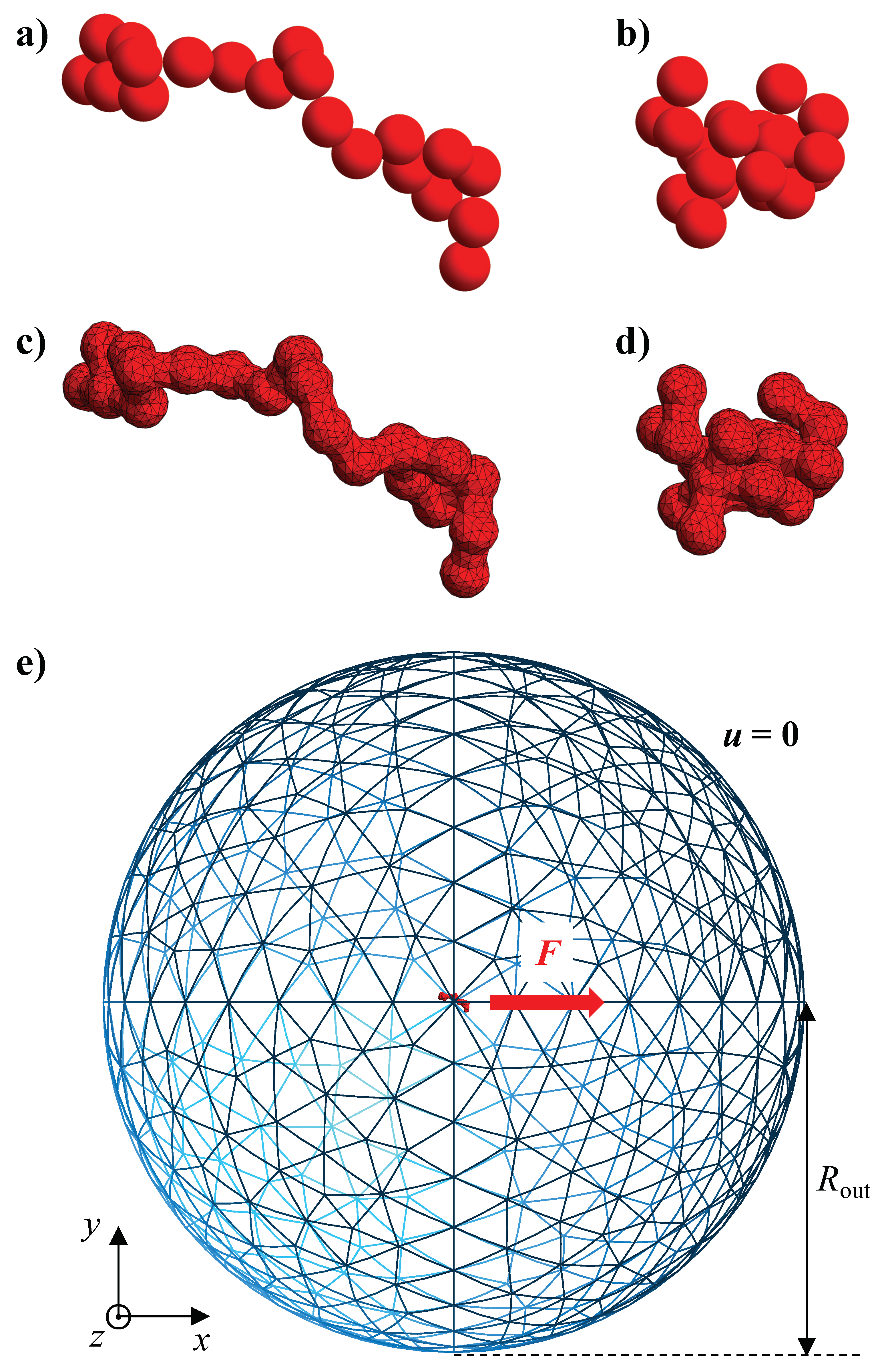
In this work, we investigate the hydrodynamic drag experienced by fractal aggregates suspended in a non-Newtonian fluid by numerical simulations. We assume that the aggregates are sufficiently large to neglect Brownian motion and that their concentration is low enough (less than 5% in volume) to avoid hydrodynamic interactions. This allows us to consider a single-particle problem. The suspending fluid is assumed to be inelastic and shear-thinning, and is modeled by the power-law constitutive equation. A map of particle velocities is precomputed by running finite element simulations for orientations of the applied force uniformly distributed over the unit sphere. Such velocities are then interpolated and used to reconstruct the aggregate dynamics by integrating the evolution equation of the particle position and orientation. The drag correction coefficient at long times is averaged over several initial orientations and particle shapes with the same fractal parameters. The effect of the fractal dimension, the number of primary particles forming the aggregate, and the flow index is investigated.
3. Results
We investigate the aggregate dynamics and the resulting drag correction coefficient by varying the fractal dimension, the flow index, and the number of primary particles forming the aggregate. The values selected for the three parameters are
,
, and
. As discussed in
Section 2.2, for each set of these parameters, we first run single-step simulations for different orientations of the applied force uniformly distributed over the unit sphere.
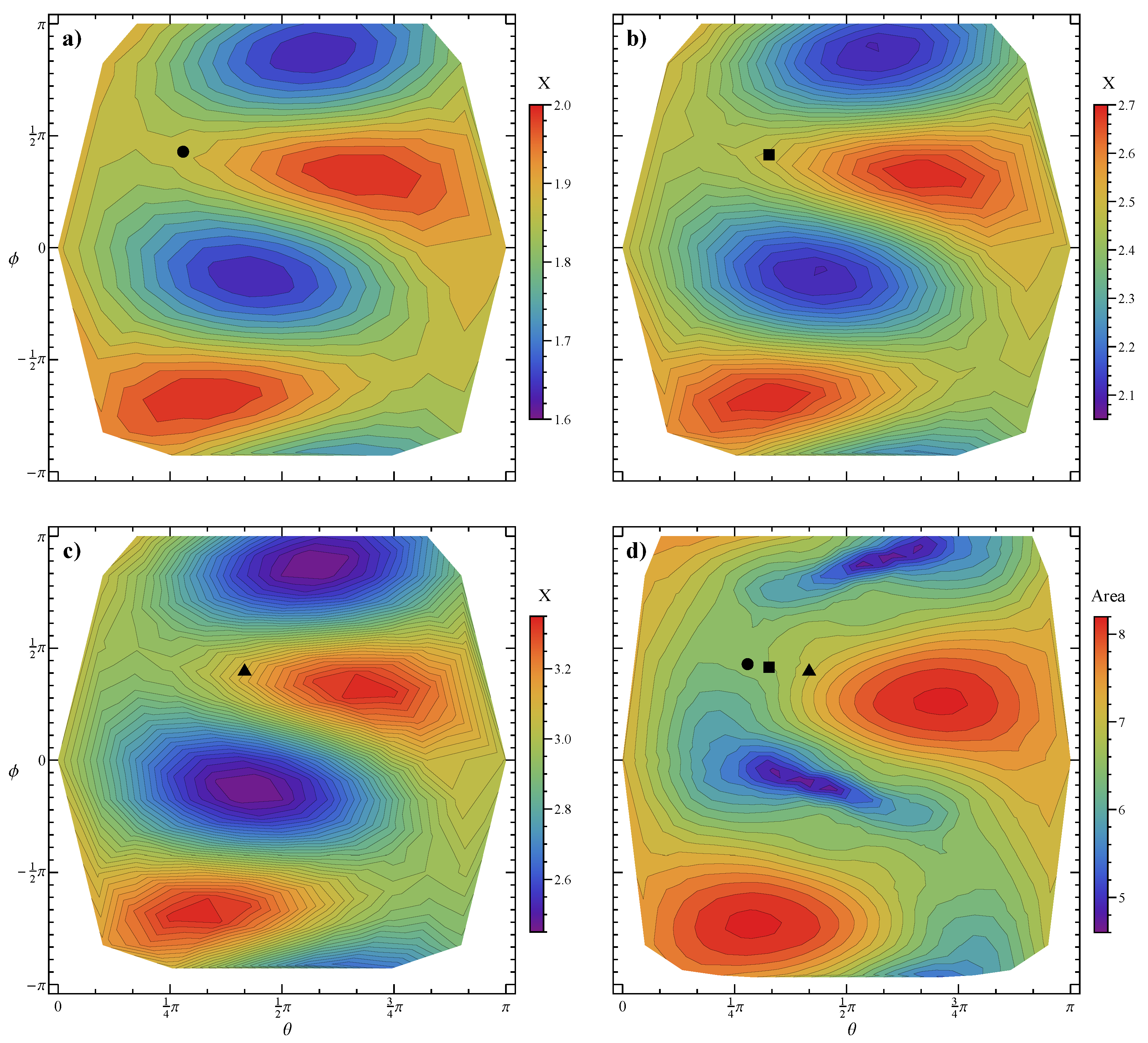
Figure 3a–c reports the drag correction coefficient
X as a function of the polar and azimuthal spherical coordinates
, identifying the orientation of the applied force for
(i.e., the Newtonian case),
, and
, respectively. The aggregate is the one shown in
Figure 1a, i.e., with
and
. It can be readily observed that (i) the drag correction coefficient depends on the orientation of the force; (ii) the distributions are symmetric since
X is the same for a specific force orientation
and its opposite
; (iii) in agreement with the spherical particle case [
25], the drag correction coefficient increases as the flow index decreases (see the bar legends on the right of the panels); and (iv) the distributions are not affected by the flow index (for instance, the maxima and minima are observed for the same orientations of the force). Previous results have evidenced a trend between the drag force experienced by a fractal aggregate and its area projected along the direction of the applied force [
14], although this geometrical quantity is not sufficient to accurately predict the drag. The dimensionless area of the aggregate projected along the force direction is reported in
Figure 3d. Specifically, we take the directions identified by the 162 vertices of the unity sphere and, for each of them, we compute the area of the aggregate projected on a plane orthogonal to that direction (identified by the spherical coordinates
and
). The comparison with panels (a)–(c) shows some similarities between the distributions, e.g., the position of the maxima and minima is approximately the same, although a strict correlation is not observed.
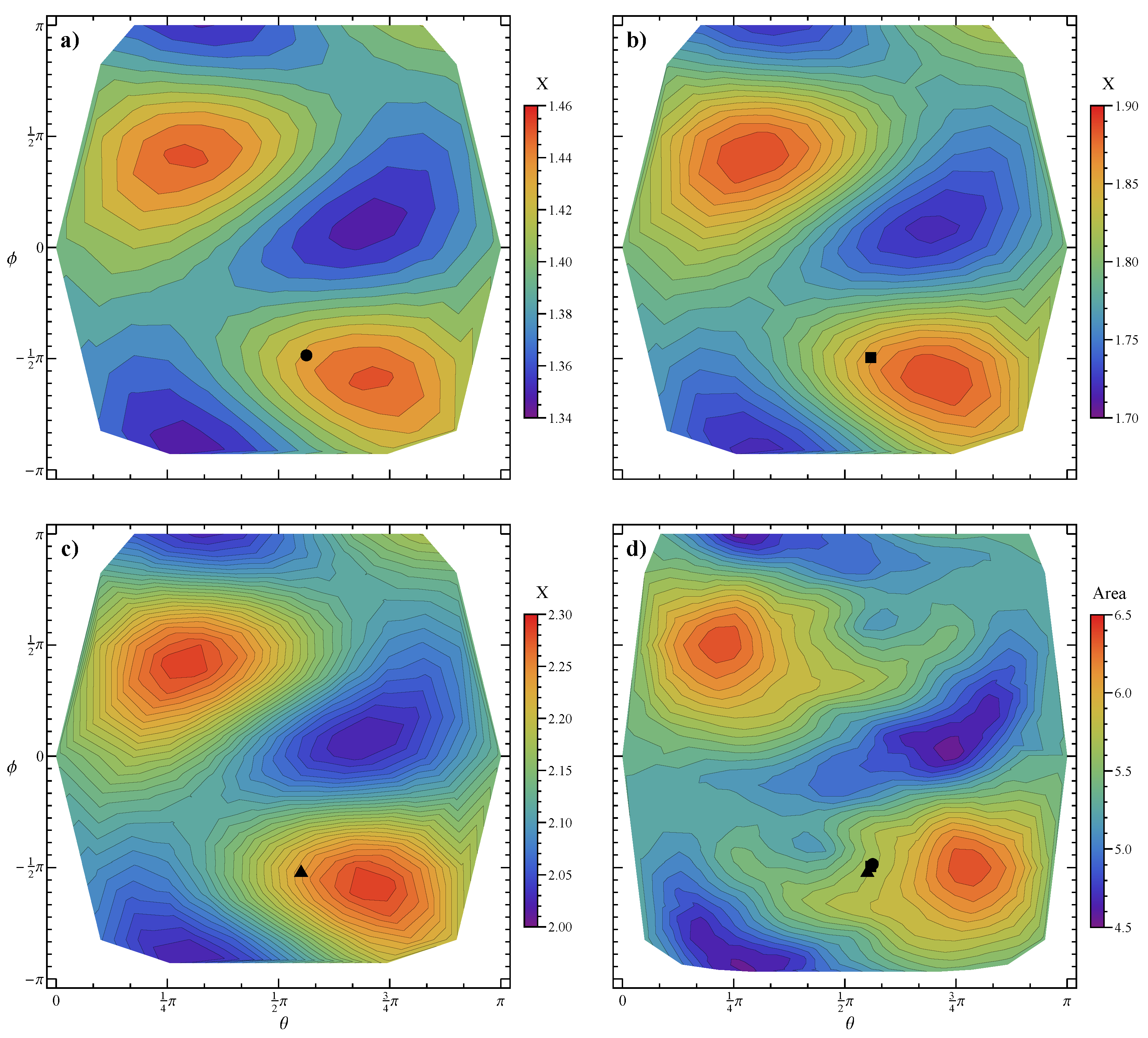
The same quantities are reported in
Figure 4 for the more sphere-like aggregate in
Figure 1b (
,
). As for the previous case, similar distributions are observed as the flow index is varied, with higher values of
X for more shear-thinning fluids. The projected area also shows a trend similar to the drag correction coefficient. Due to the higher value of the fractal dimension leading to an aggregate with a more spherical shape, the range of variation of both the projected area and the drag correction coefficient is narrower than in the case at
, i.e., the influence of the force orientation is weaker.
The data presented so far refer to the instantaneous drag correction factor, i.e., the one obtained by solving the fluid dynamics equations for a fixed orientation of the force (or, equivalently, of the aggregate for a fixed force). The applied force, however, generates a rotation of the aggregate (and, of course, a translation) leading to a change of the orientation and, in turn, of the drag correction coefficient. The knowledge of the orientational dynamics of the aggregate is then crucial to determine the time evolution of the drag correction coefficient and the regime attained by the particle. By using the procedure described in the previous section, we compute the orientational dynamics of the applied force for different initial orientations.
Figure 5 shows the orbits for the aggregates reported in
Figure 1a (top row) and
Figure 1b (bottom row), and for the Newtonian (left column) and power-law fluid with
(right column). Twelve initial orientations uniformly distributed over the unit sphere are considered (blue circles). For these sets of parameters, the orbits converge towards a unique equilibrium point (green circle) regardless of the initial orientation. In the fixed reference frame, this means that the aggregate achieves a stable orientation. Specifically, our simulations show that, once the regime is achieved, the particle still rotates around the applied force, although with a very small rotation rate (the resulting linear velocity, obtained as the angular velocity around the applied force times the effective radius, is 2–3 orders of magnitude smaller than the sedimentation velocity). It is important to point out, however, that this rotation does not influence the drag as any configuration around the force is equivalent (i.e., the force direction is a symmetry axis). The orientations of the force corresponding to the equilibrium points (green circles in
Figure 5) are shown as symbols in the previous
Figure 3 and
Figure 4. It can be readily observed that shear-thinning slightly affects the equilibrium orientation only for rod-like particles, whereas it has no influence for higher values of the fractal dimension (the symbols in
Figure 4 overlap). Moreover, in both cases, the equilibrium orientation does not correspond to any special value of the projected area (for instance the minimum). Therefore, this quantity is not representative of the final orientation achieved by the aggregate and, as such, it is not helpful to estimate the drag correction factor at long times. On the contrary, the detailed microstructure of the aggregate needs to be considered to correctly predict the sedimentation dynamics.
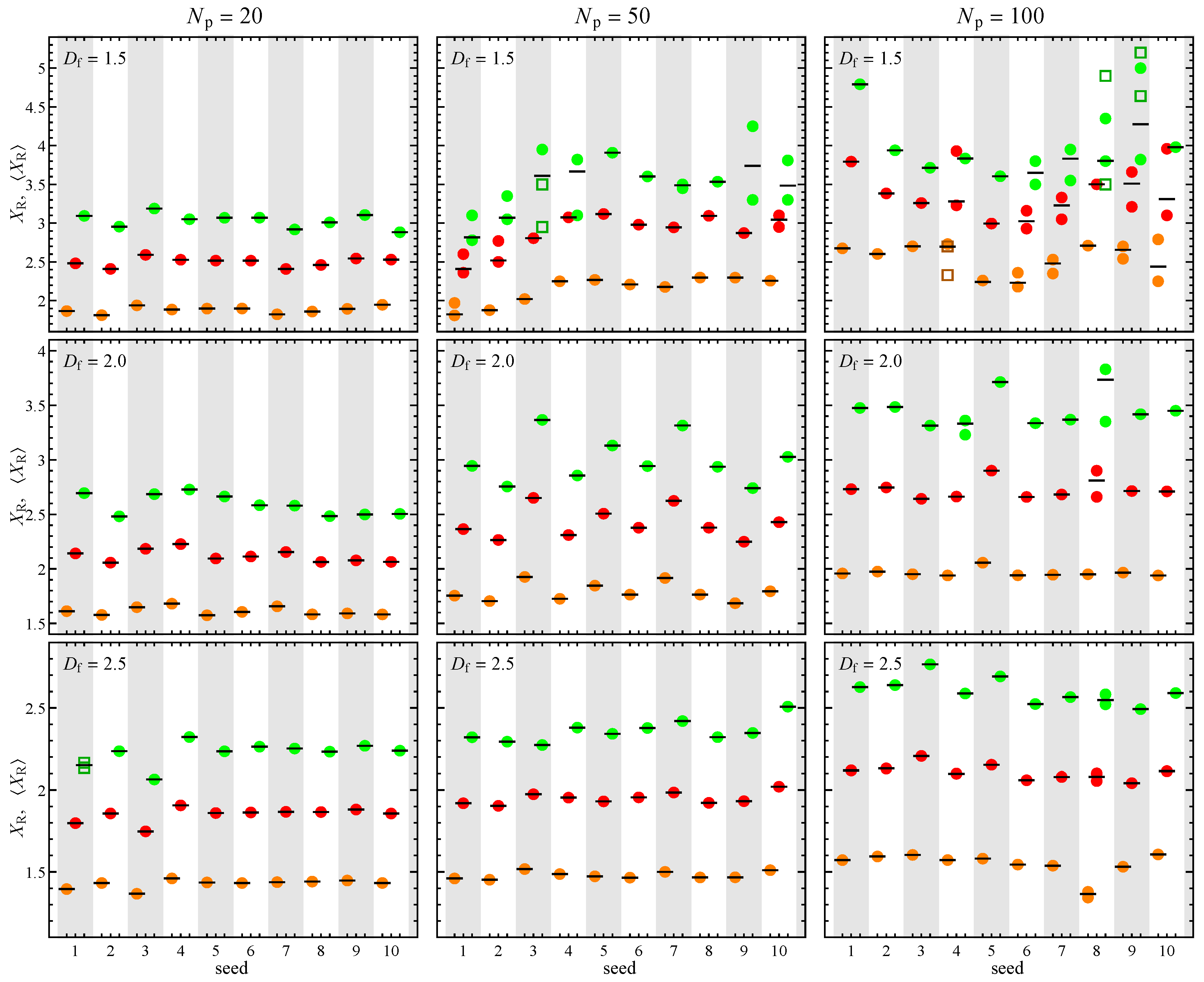
To further investigate on the effect of aggregate morphology, we have repeated the calculations by varying the seed of the random number generator. We recall that, although the fractal parameters in Equation (
1) are fixed, the morphologies obtained by varying the seed are different. In the leftmost panels of
Figure 6, the regime drag correction coefficient is shown as a function of the seed for
and for different values of the fractal dimension and the flow index. If the force reaches an equilibrium point, regardless of the initial orientation like the orbits shown in
Figure 5,
is taken as the steady-state value. These points are represented as solid circles in
Figure 6. The data show that, for
, the specific morphology (seed) has a relatively weak effect on
, with a maximum relative deviations of 7% from the average value. Furthermore, in all the investigated cases, a single equilibrium orientation is achieved, except in one case (
,
, and
) that will be discussed later.
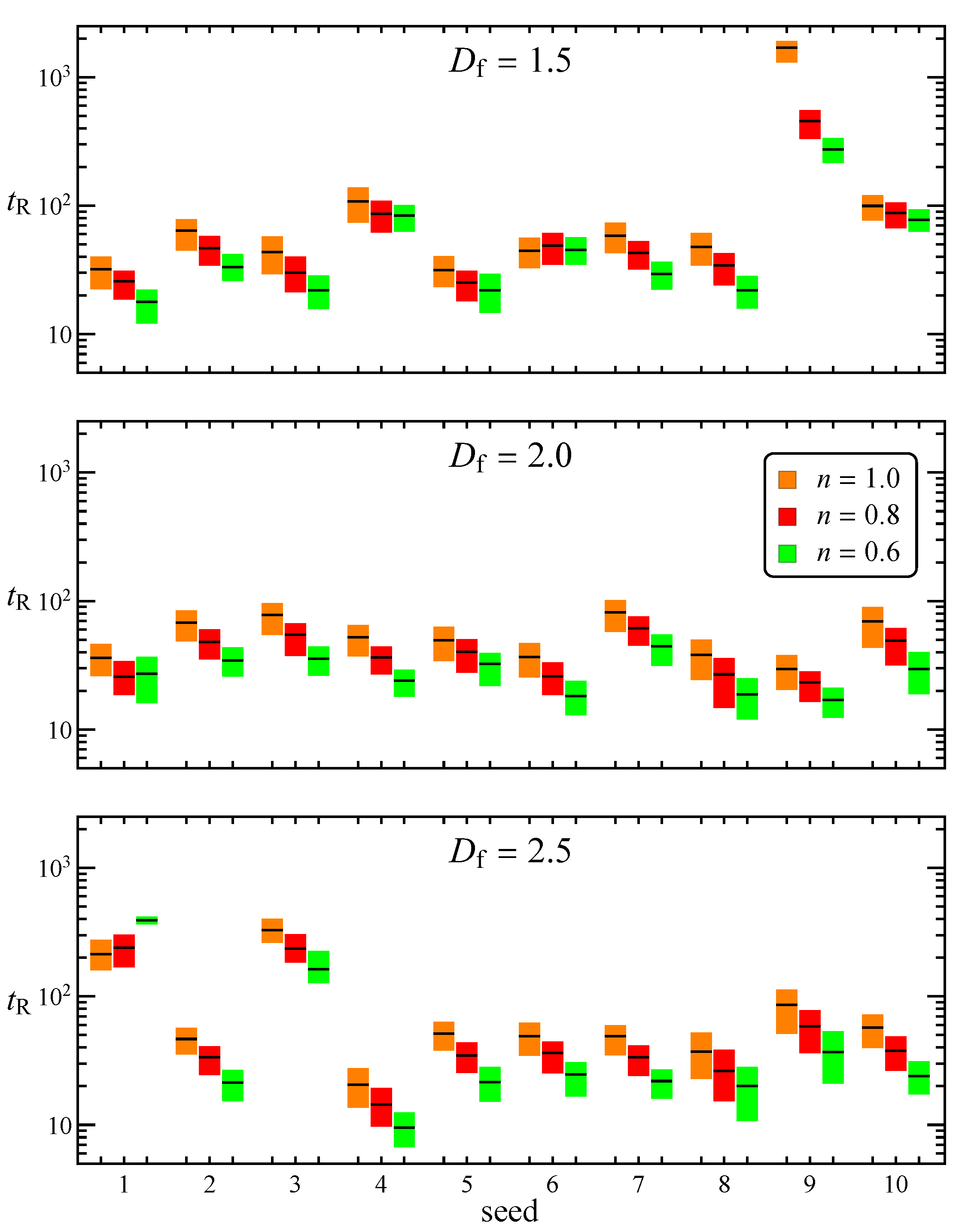
A relevant quantity for the sedimentation process is the time
needed to achieve the final regime. For instance, with reference to
Figure 5, this is the time needed to travel along the orbits from the initial orientation to the green circle. Of course, the time strongly depends on the initial orientation. Thus, we compute the orbits followed by the aggregate with orientation starting from the 162 vertices of the spherical triangle mesh discussed in the previous section and, for each orbit, we estimate the time needed to achieve the regime within a certain tolerance. In case a single steady-state regime exists, we calculate the time the force requires to align with the equilibrium orientation within an angle tolerance of
. The results for
and different values of the seed, fractal dimension, and flow index are shown as box plots in
Figure 7. The lower and higher limits of each box plot represent the first and third quartile over the different initial orientations, whereas the black dash is the median. In general, the (dimensionless) time decreases as the flow index decreases, whereas it is rather unaffected by the fractal dimension, ranging between 10 and 100 for almost all the examined cases. There are, however, some exceptions leading to remarkably longer times.
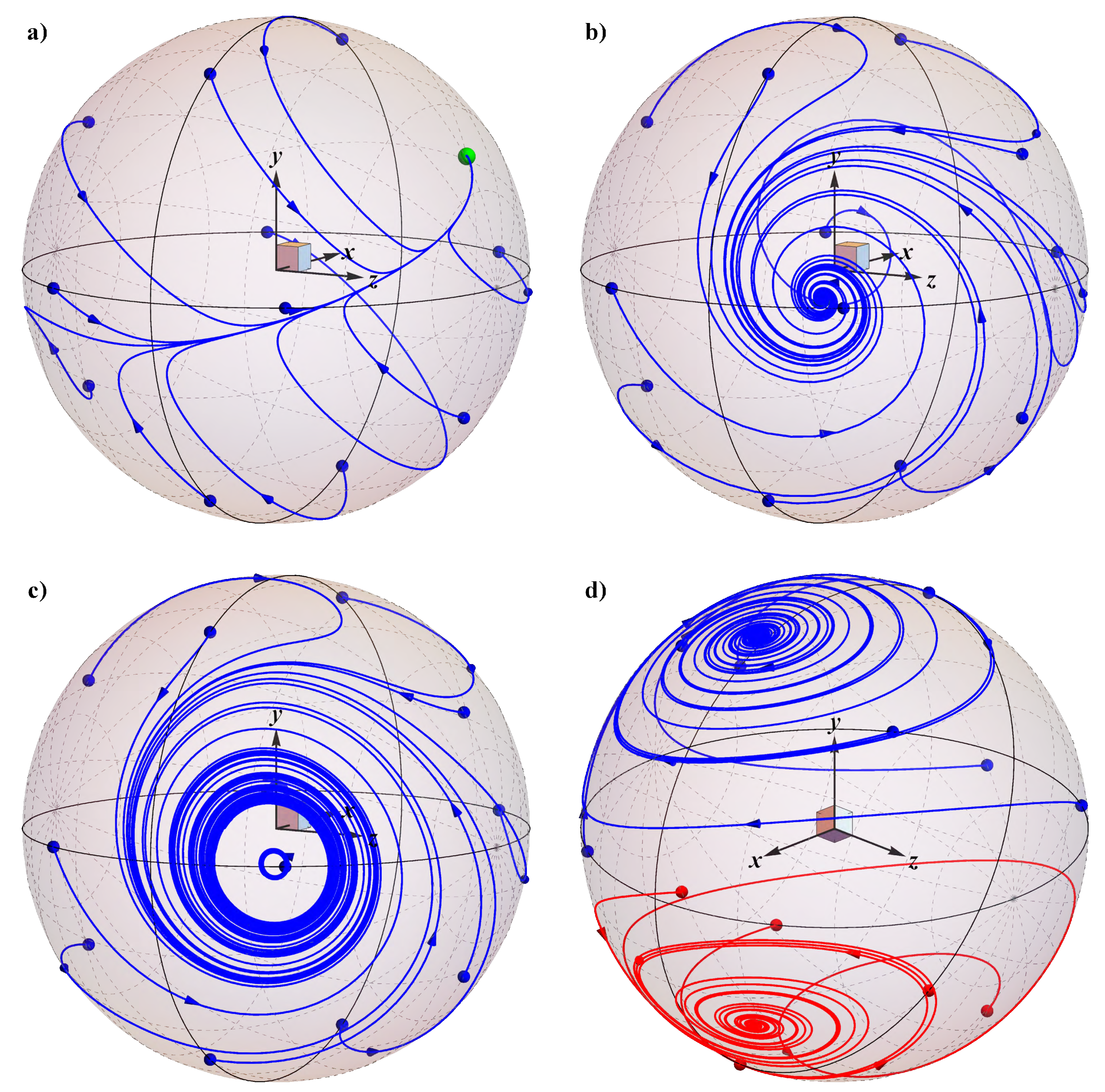
To investigate these particular cases more in detail, we show in
Figure 8 the orbits described by the orientation of the force for (i)
,
,
(
Figure 8a corresponding to the highest box plot in the top panel of
Figure 7); (ii)
,
,
(
Figure 8b corresponding to the leftmost red box plot in the bottom panel of
Figure 7); and (iii)
,
,
(
Figure 8c corresponding to the leftmost green box plot in the bottom panel of
Figure 7). In the first case, we still observe a dynamics similar to what reported in
Figure 5 with all the orbits converging to a single equilibrium point. However, at variance with the previous cases where the orbits independently moved towards the equilibrium point, now each trajectory converges first towards a common orbit and then, very slowly, to the equilibrium orientation, resulting in a drastic increase of the time needed to reach the steady-state regime. A similar dynamics is also observed for the same seed and for
(red box plot) and
(green box plot), as well as for
and
. A different scenario is observed for the second case (
Figure 8b), where the orientation of the force follows spiraling trajectories before reaching the equilibrium point, also resulting in a longer transient dynamics. In the third case reported in
Figure 8c, the regime becomes periodic with the presence of a limit cycle. Therefore, while settling, the aggregate continuously changes its orientation around the applied force, coming back to the same configuration after a certain period. Notice that the cases in
Figure 8b,c correspond to the same aggregate (the fractal parameters and the seed are the same) and differ for the flow index. Further, the same aggregate in a Newtonian fluid (
) gives orbits like the ones shown in
Figure 5. Thus, we conclude that, for this aggregate shape, a decrease of the flow index leads to the appearance of a bifurcation (specifically a Hopf bifurcation [
44]) with a qualitative change in the regime attained by the aggregate. In the case of a periodic regime, the time reported in
Figure 7 is evaluated as the time needed to reach the limit cycle within a tolerance of
on
X. Notice that the appearance of the bifurcation inverts the trend of
with the flow index (the values of the box plots corresponding to
in
Figure 7c increase with decreasing
n). As the number of primary particles of the aggregate increases, another possible scenario, depicted in
Figure 8d for
,
,
, appears. Two equilibrium regimes are observed, identified by the blue and red orbits. Therefore, depending on the initial configuration, the aggregate can orient along one of the two stable orientations.
By increasing the complexity of the shape, i.e., by increasing
and decreasing
, spiraling orbits, periodic, and bistable regimes are more frequent, leading to a substantial increase of the time needed to reach the final orientation, and, more importantly, to a significant effect of the detailed morphology (i.e., the seed used to generate the aggregate) on the settling dynamics. This is illustrated in the middle and right panels of
Figure 6 where the regime drag correction coefficient is shown as a function of the seed for
and
. The periodic regime is denoted by two open squares identifying the maximum and minimum values of the oscillation, with a corresponding
calculated by averaging
X over a period. The bistability is indicated by two closed circles that represent the values of
for the two equilibrium points. In
Figure 6, the average of the regime drag correction coefficient over all the initial orientations (
in Equation (
13)) is also reported as a black dash. In case of a single equilibrium orientation, the unique solid circle coincides, in fact, with the dash. When multiple regimes coexist, the black dash is closer to the one that attracts more orbits. Notice that, in some cases (see, e.g.,
,
,
, and
), the values of
for the two equilibrium points are remarkably different, resulting in a relevant quantitative effect of the initial orientation on the terminal velocity. At variance with the case at
, the effect of the microstructure (seed) is much more relevant, leading to deviations up to
from the value of the drag correction coefficient averaged over the seeds. In particular, maximum deviations are found for more elongated aggregates rather than sphere-like shapes. (Indeed, in the limiting case of a spherical aggregate, different seeds would produce the same shape.)
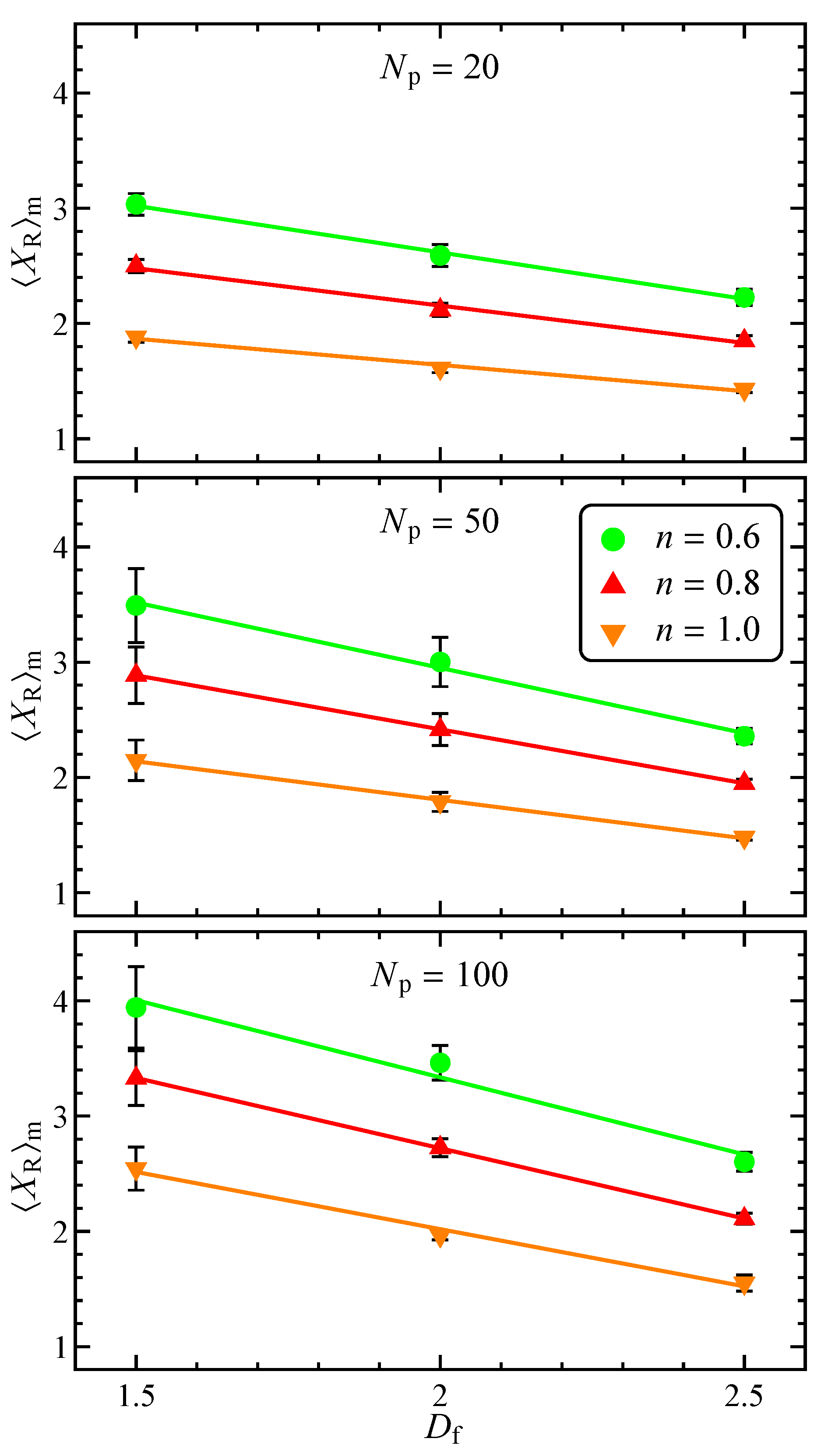
By averaging the data in
Figure 6 over the seeds, we obtain the ensemble-average drag correction coefficient
reported in
Figure 9. The data are shown as a function of the fractal dimension, where each panel refers to a fixed number of primary particles and the curves are parametric in the flow index. For the Newtonian case (orange symbols),
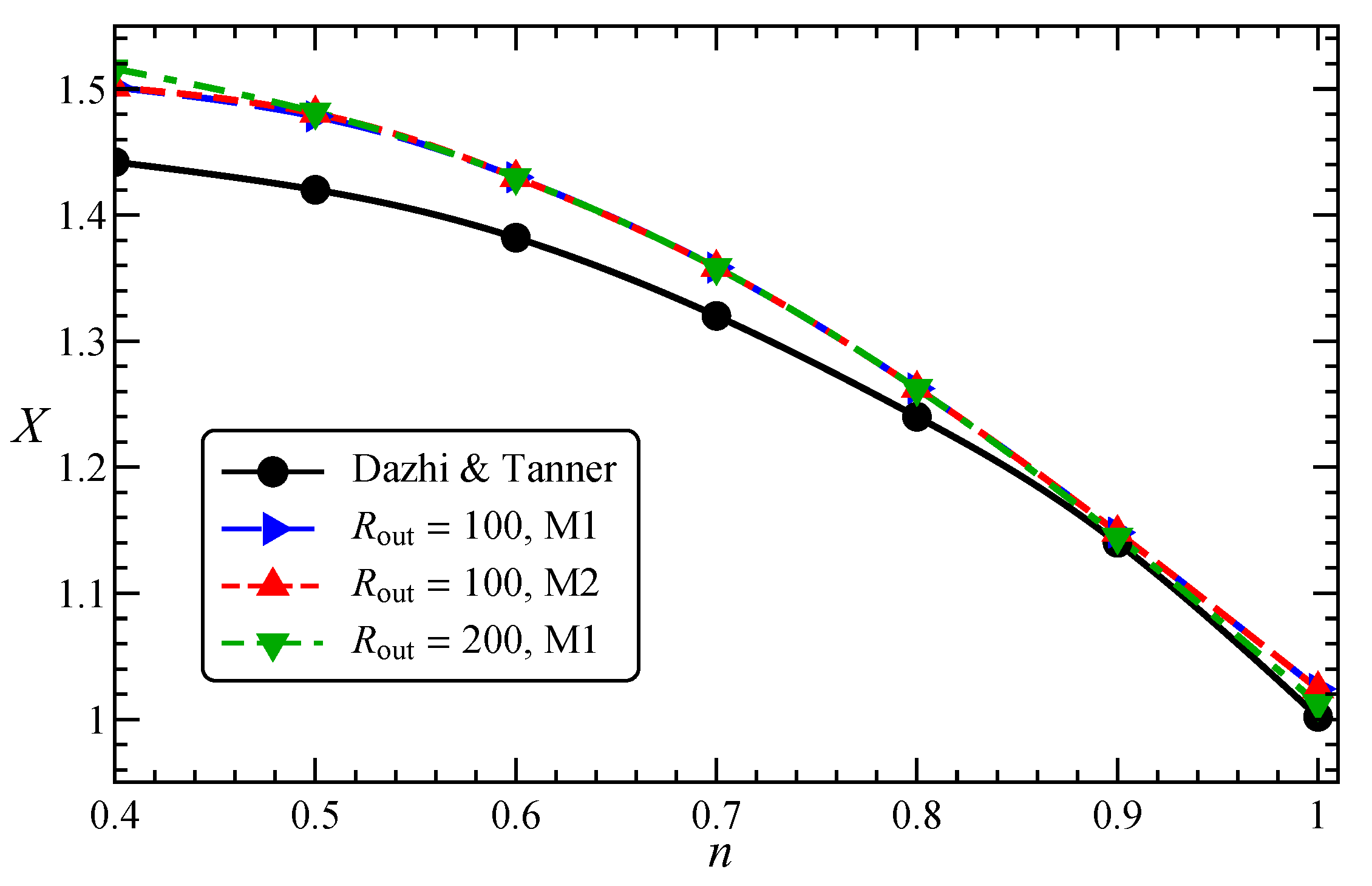
can be used to calculate the hydrodynamic radius, which is found to be quantitatively consistent with the one reported in [
33]. In the investigated range of
, the drag correction factor is a linear decreasing function of the fractal dimension, i.e., an aggregate with a more spherical shape sediments faster than one with a rod-like morphology. In agreement with previous results for spheres [
25], shear-thinning increases the drag correction coefficient. As already noted in
Figure 6, higher values of
are observed as
increases. This effect is more evident for low fractal dimensions where a variation of the number of primary particles affects the aspect ratio of the aggregate, in turn altering the drag experienced by the particle. On the contrary, as previously remarked, for aggregates with a sphere-like shape (high
), the number of primary particles mainly affects the “resolution” of the microstructure, without substantially changing the main geometrical features. For the same reason, the error bars are larger for low
and high
. As a final note, we recall that, especially for low fractal dimension, a variation of the number of particles and flow index may lead to different dynamics followed by the aggregate while sedimenting. In some cases, our simulations evidenced a qualitative change of the regime attained by the particle (e.g., a bifurcation) as one of these parameters is varied, with obvious consequences on the drag correction factor and on the time needed to achieve such regime. These observations prevent us to derive a simple scaling of
with
and
n. In this regard, also the averaging of
over different seeds is, in some sense, misleading as it combines drag correction coefficients of aggregates that can experience very different dynamics. Therefore, we point out once again the importance of considering the detailed microstructure of the aggregate to correctly predict its sedimentation dynamics.
4. Conclusions
In this work, the hydrodynamic drag experienced by a fractal aggregate suspended in a non-Newtonian fluid is studied by numerical simulations. The aggregate shape is generated through a particle–cluster method combining equally-sized spherical particles. The power-law constitutive equation is used to model the suspending fluid. Finite element simulations are employed to solve the fluid dynamics governing equations, for orientations of the applied force uniformly distributed over the unit sphere. These velocities are interpolated and used to reconstruct the translational and orientational aggregate dynamics. The drag correction coefficient at long times is averaged over several initial orientations and particle shapes with the same fractal parameters.
The results show a relevant effect of the aggregate morphology and shear-thinning on the sedimentation dynamics. Depending on the fractal dimension, the number of primary particles forming the aggregate, and the flow index, the aggregate can undergo a variety of rotational dynamics while settling. These can lead to a stable orientation, periodic oscillations around the force direction, or coexistence of multiple equilibrium orientations, with relevant implications on the terminal velocity and the time needed to achieve the long-time regime.
The ensemble-average drag correction coefficient linearly decreases by increasing the fractal dimension in the investigated range, i.e., rod-like aggregates sediment more slowly than particles with an isotropic shape. Shear-thinning further reduces the settling velocity. At low fractal dimensions, the number of primary spheres has a relevant influence on the drag correction coefficient as it affects the aggregate aspect ratio. On the contrary, a weak effect is observed for aggregates with a sphere-like shape as an increase of the number of spheres does not produce a relevant change of the overall morphology.
The results reported in the present work highlight that the detailed particle shape needs to be considered to properly predict the sedimentation dynamics. As a matter of fact, a variation of the morphology, even with the same fractal characteristics, may lead to different transients and final regimes. Therefore, to properly understand the settling phenomenon, the connection between the shape of the aggregate and the resulting translational and rotational dynamics needs to be investigated. This will be the subject of future works.
Finally, we would like to point out that the present results, although discussed in the context of the sedimentation process, apply to any system in which a particle of fractal shape moves in a shear-thinning liquid in a uniform flow field. Indeed, regardless of the nature of the applied force, the particle experiences an hydrodynamic resistance that can be predicted from the results reported in this work. In this regard, neglecting the details of the specific morphology, our calculation can be exploited to derive a drag correlation model to be included in a computational fluid dynamic solver for simulating particle laden flows [
45].













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}