Flight Strategy Optimization for High-Altitude Solar-Powered Aircraft Based on Gravity Energy Reserving and Mission Altitude



Abstract
:1. Introduction
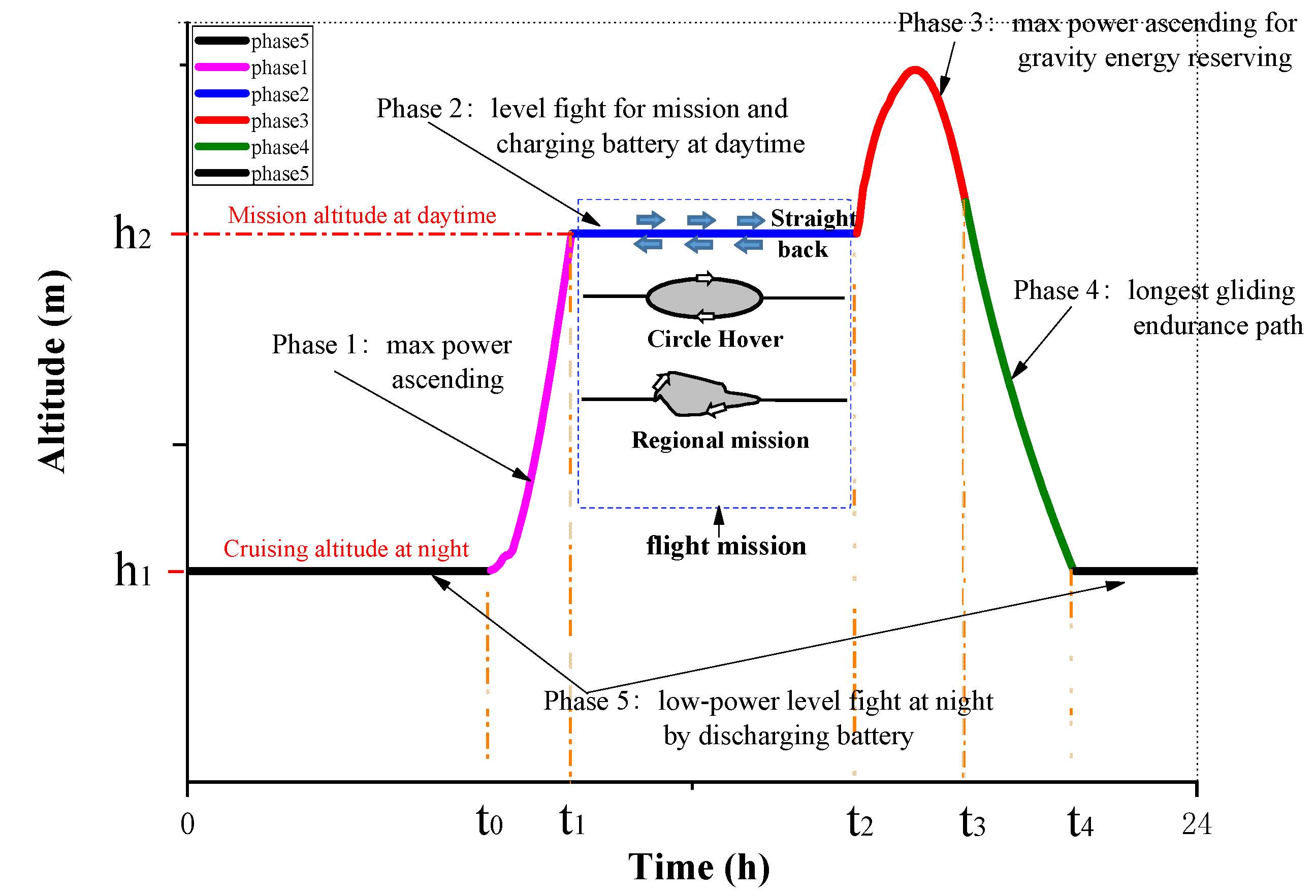
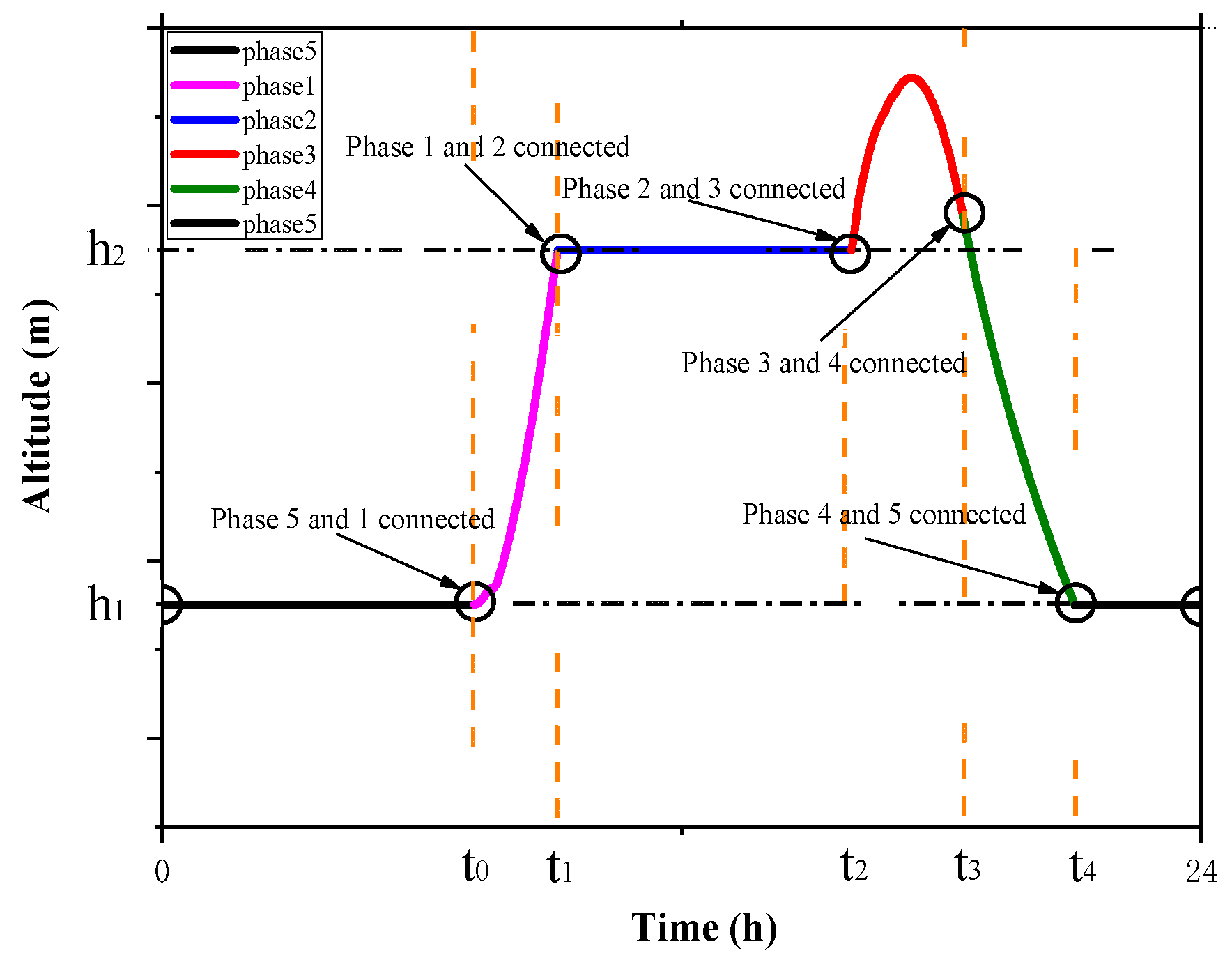
- A flight path phase model based on gravity energy reserving and mission altitude is proposed for engineering applications and day and night cycle flight.
- In order to calculate the three-dimensional solar energy collection, an energy collection model which contains geolocation, height, aircraft attitude angle is established.
- Due to the mission altitude level flight of the high-attitude SPA, this study shows that the mission altitude may be more beneficial to engineering applications for multiple task execution, like circle hover and Regional residency for natural monitoring, field investigations, communications relay and so on.
- A unique family of solution model of three-dimensional flight strategy optimization for SPA with minimal battery mass is proposed by GPM.
- Due to the particularity of the solar aircraft energy harvesting system, the study results also indicate that a three-dimensional flight strategy optimization may be more beneficial for gaining more solar energy.
2. Models and Methods
2.1. The Flight Path Phase Model
2.2. Aerodynamic Model
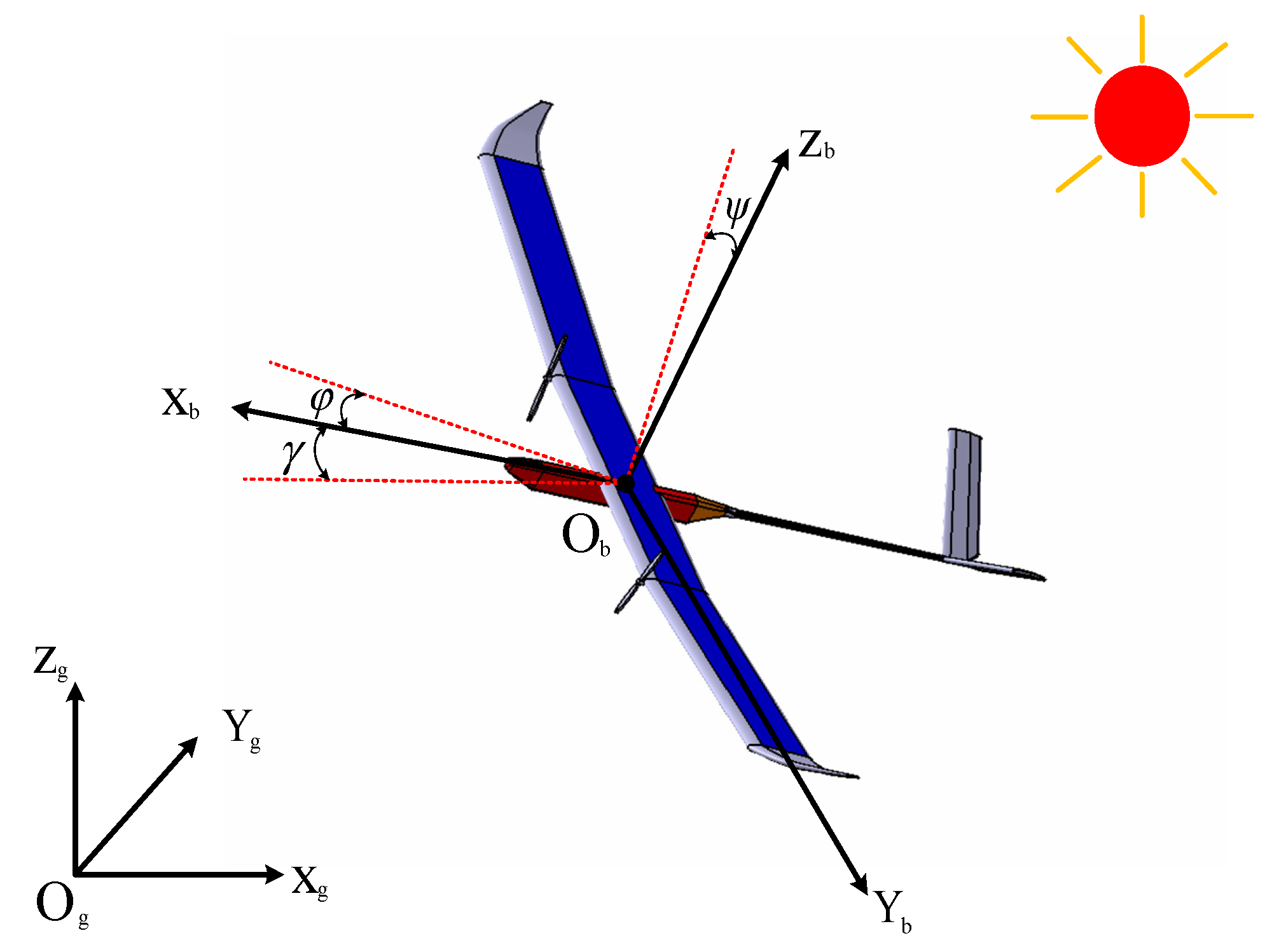
2.3. Aircraft Kinematic Model in Three Dimensional
2.4. Solar Irradiation Model and Mission Conditions
2.4.1. Calculation Model of Solar Radiation Intensity in Ground Coordinate System
2.4.2. Calculation Model of Solar Radiation Intensity in the Body Coordinate System
2.5. Problem Optimization Frame
2.6. Optimization Approach and Solving Process
3. Simulation and Results Discussion
3.1. Simulation Condition
3.2. Result and Discussion
4. Conclusions
- A flight path phase model based on gravity energy reserving and mission altitude has been carried out for analysis and research background for engineering applications is taken into consideration for the day and night cycle flight and tasks.
- GPM is feasible for the research on flight trajectory optimization for high-altitude SPA due to its advantages in calculation efficiency and accuracy as well as the integration between GPOPS and function files in MATLAB.
- This flight trajectory optimization results shows that Zephyr 7 can reduce the battery mass from 16 kg to 12.61 kg for the day and night cycle flight and missions, which equals to reducing its total mass by 6.4%.
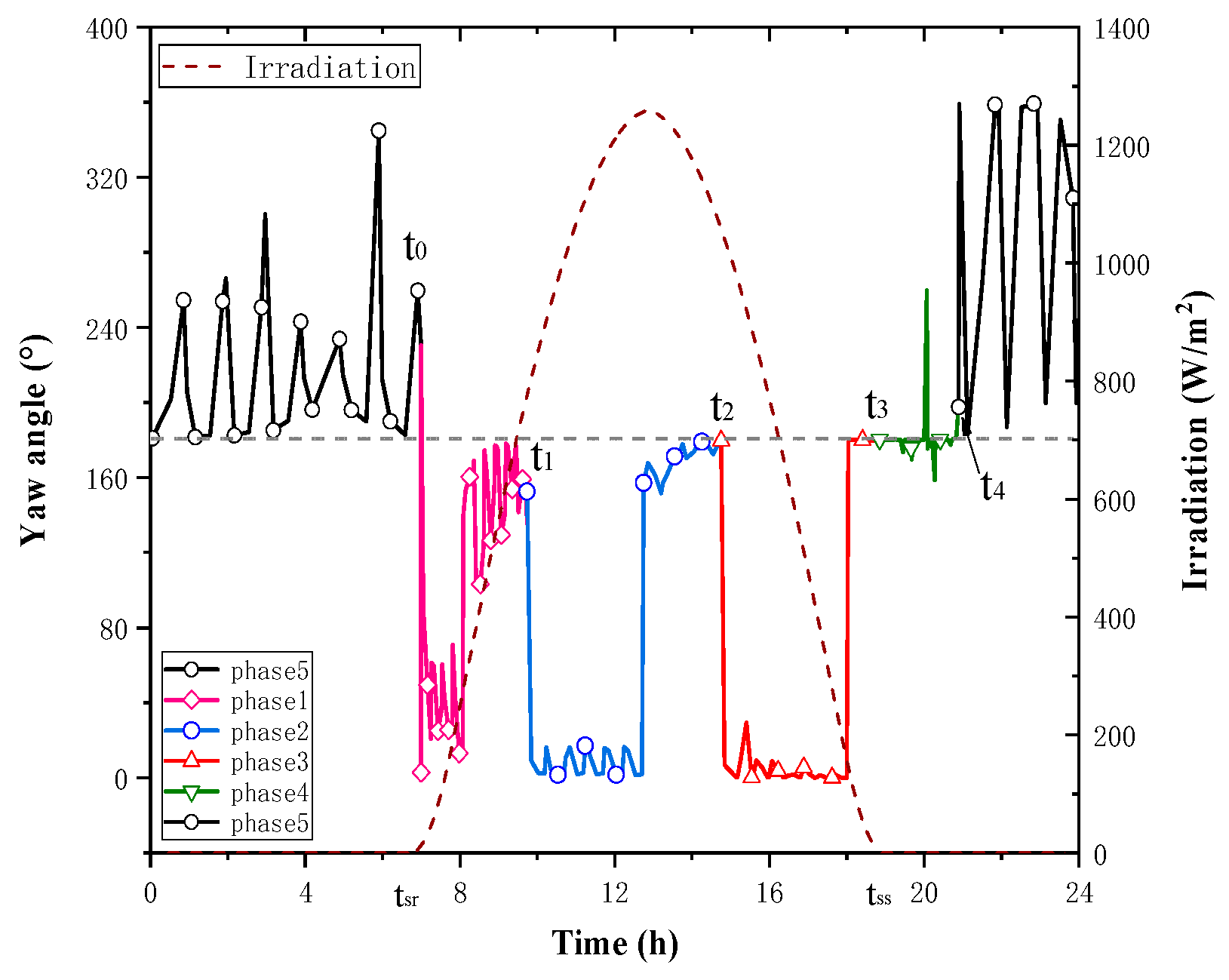
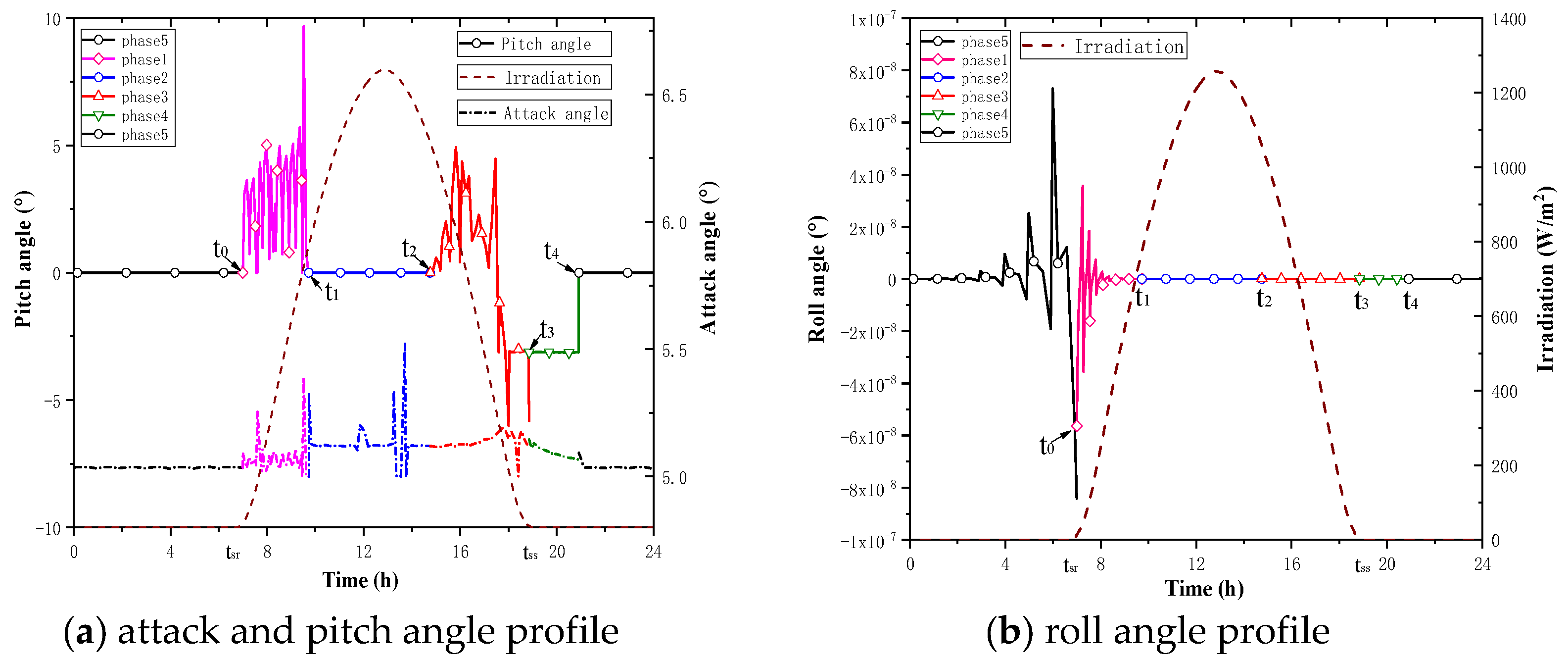
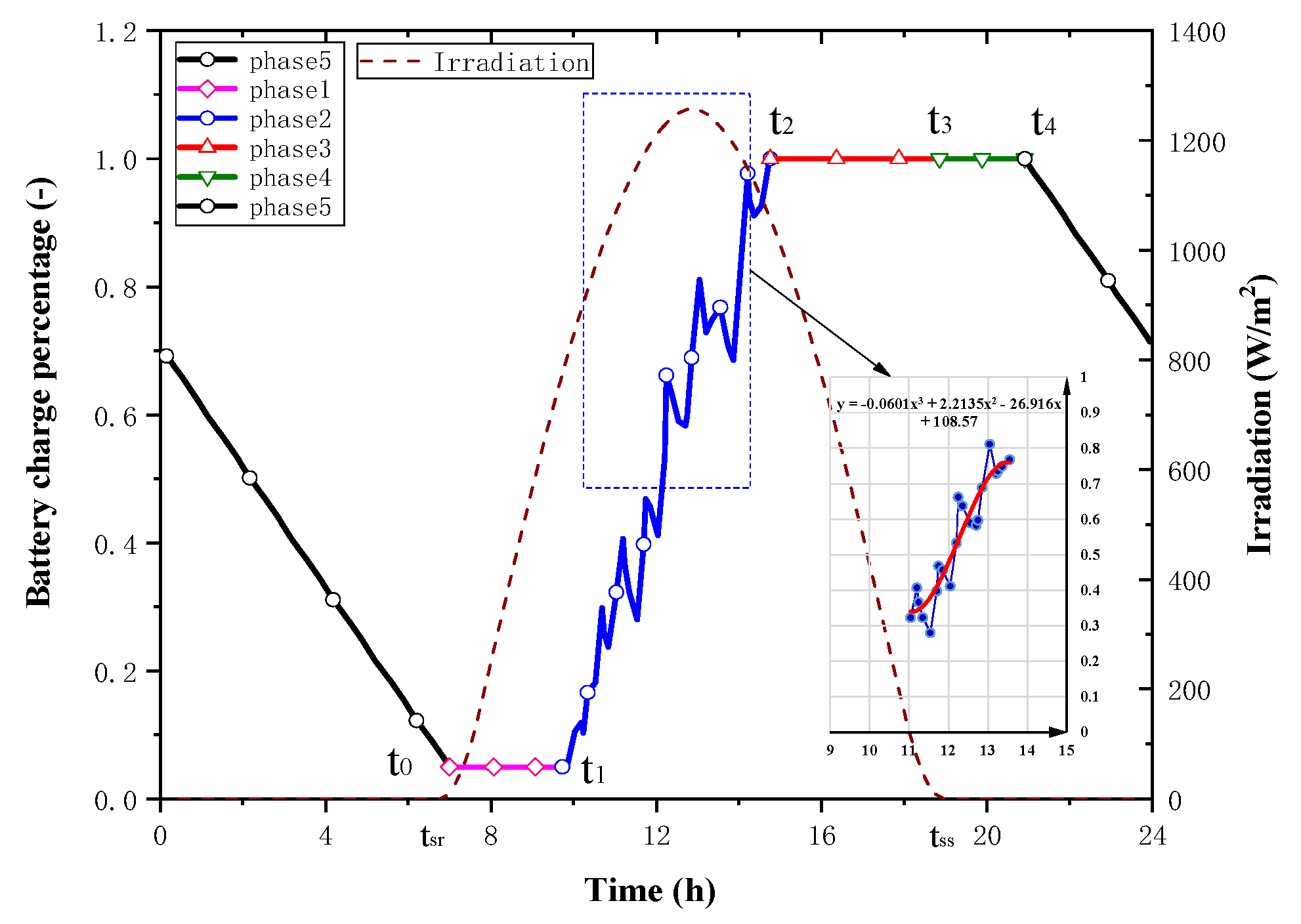
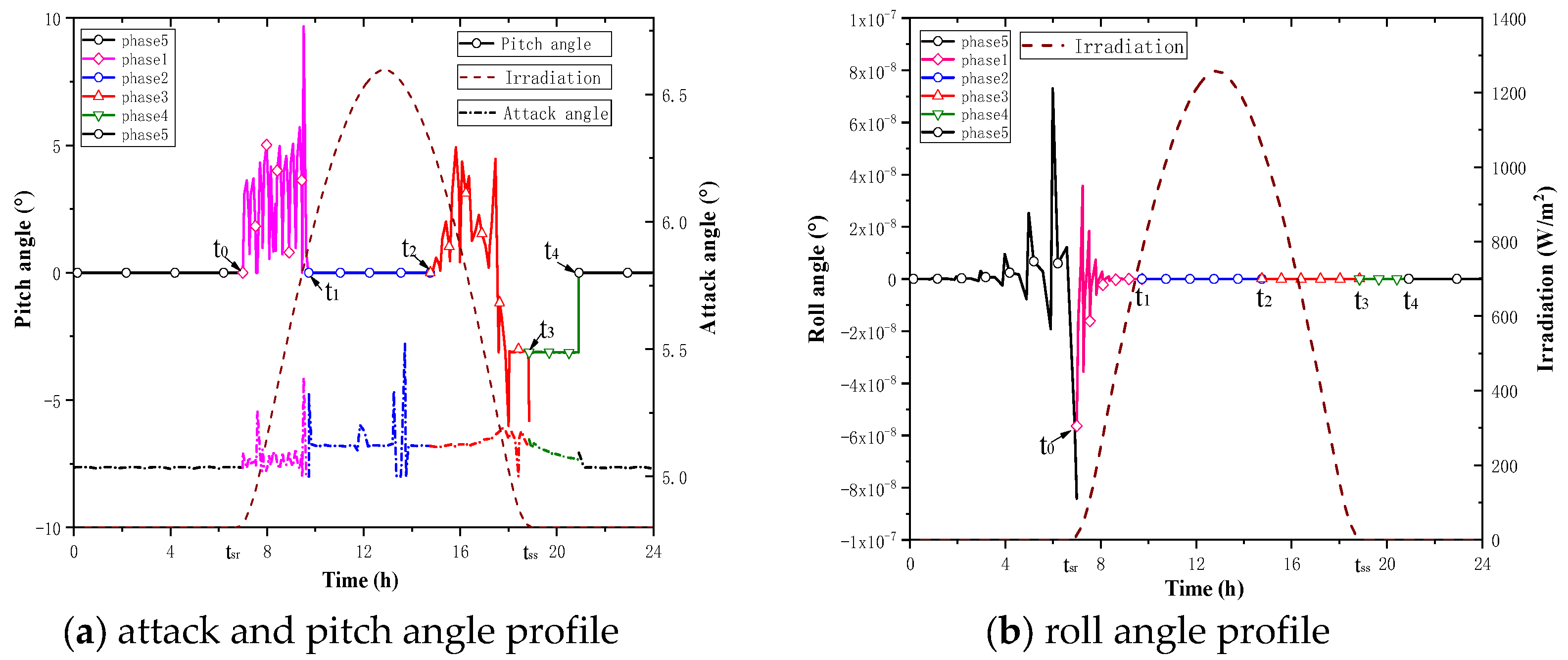
- According the optimization results, the yaw angel may have more influence on high-altitude SPA 3D flight strategy in energy harvesting than the roll angle and the battery charge rate has good following to the solar irradiation intensity, which is instructive for SPA to use solar radiation reasonably at noon phase in mission execution.
Author Contributions
Funding
Conflicts of Interest
References
- Noth, A. Design of Solar Powered Airplanes for Continuous Flight. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2008. [Google Scholar]
- Gao, X.Z. Research on High-Altitude Long-Endurance Flight based on Energy Storage by Gravitational Potential and Energy Extraction from Wind Shear. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2014. [Google Scholar]
- Noll, T.E.; Brown, J.M.; Perez-Davis, M.E.; Ishmael, S.D.; Tiffany, G.C.; Gaier, M. Investigation of the Helios Protype Aircraft Mishap; Volume I Mishap Reprot: Hamptom, VA, USA, 2004. [Google Scholar]
- Zephyr Pioneering the Stratosphere. Available online: www.airbus.com (accessed on 7 August 2018).
- Hannes, R. Fly Around the World with a Solar Powered Airplane. In Proceedings of the 26th Congress of international Council of the Aeronautical Sciences, Anchorage, Alaska, 14–19 September 2008. [Google Scholar]
- Klesh, A.T.; Kabamba, P.T. Solar-Powered Aircraft: Energy-Optimal Path Planning and Perpetual Endurance. J. Guid. Control. Dyn. 2009, 32, 1320–1329. [Google Scholar] [CrossRef] [Green Version]
- Rajendran, P.; Masral, M.H.; Kutty, H.A. Perpetual Solar-Powered Flight across Regions around the World for a Year-Long Operation. Aerospace 2017, 4, 20. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.F. Generalized Energy Based Conceptual Design Method of Solar-powered Airplane. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2014. [Google Scholar]
- Huang, Y.; Chen, J.; Wang, H.; Su, G.; Yu, H.; Jianguo, C.; Honglun, W.; Guofeng, S. A method of 3D path planning for solar-powered UAV with fixed target and solar tracking. Aerosp. Sci. Technol. 2019, 92, 831–838. [Google Scholar] [CrossRef]
- Ding, Y.; Zhou, Z.; Wang, Z.; Liu, H.; Wang, K. Bionic Stiffener Layout Optimization with a Flexible Plate in Solar-Powered UAV Surface Structure Design. Appl. Sci. 2019, 9, 5196. [Google Scholar] [CrossRef] [Green Version]
- Klesh, A.; Kabamba, P. Energy-Optimal Path Planning for Solar-Powered Aircraft in Level Flight. In Proceedings of the Guidance Navigation, and Control Conference, Hilton, SC, USA, 20–23 August 2007. [Google Scholar]
- Gao, X.-Z.; Hou, Z.-X.; Guo, Z.; Fan, R.-F.; Chen, X.-Q. The equivalence of gravitational potential and rechargeable battery for high-altitude long-endurance solar-powered aircraft on energy storage. Energy Convers. Manag. 2013, 76, 986–995. [Google Scholar] [CrossRef]
- Widmer, J.D.; Donaghy-Spargo, C.; Atkinson, G.J.; Mecrow, B.C. Solar Plane Propulsion Motors With Precompressed Aluminum Stator Windings. IEEE Trans. Energy Convers. 2014, 29, 681–688. [Google Scholar] [CrossRef] [Green Version]
- Noth, A. Designing solar airplanes for continuous flight. SPIE Newsroom 2009. [Google Scholar] [CrossRef] [Green Version]
- Brandt, S.A.; Gilliam, F.T. Design analysis methodology for solar-powered aircraft. J. Aircr. 1995, 32, 703–709. [Google Scholar] [CrossRef]
- Sachs, G.; Lenz, J.; Holzapfel, F. Unlimited Endurance Performance of Solar UAVs with Minimal or Zero Electrical Energy Storage. In Proceedings of the AIAA Guidance Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009. [Google Scholar]
- Langelaan, J.W.; Roy, N. Enabling New Missions for Robotic Aircraft. Science 2009, 326, 1642–1644. [Google Scholar] [CrossRef]
- Langelaan, J.W.; Spletzer, J.; Montella, C.; Grenestedt, J. Wind Field Estimation for Autonomous Dynamic Soaring. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Chengdu, China, 5–8 August 2012; pp. 16–22. [Google Scholar]
- Zhong, G.X.; Xi, H.Z.; Xia, L.J.; Qian, C.X.; Zheng, G. The influence of wind shear to the performance of high-altitude solar-powered aircraft. Proc. Inst. Mech. Eng. Part G: J. Aerosp. Eng. 2013, 228, 1562–1573. [Google Scholar] [CrossRef]
- Spangelo, S.; Gilbert, E.; Klesh, A.; Kabamba, P.; Girard, A. Periodic Energy-Optimal Path Planning for Solar-Powered Aircraft. In Proceedings of the AIAA Guidance Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009. [Google Scholar]
- Hosseini, S.; Mesbahi, M. Energy-Aware Aerial Surveillance for a Long-Endurance Solar-Powered Unmanned Aerial Vehicles. J. Guid. Control. Dyn. 2016, 39, 1–14. [Google Scholar] [CrossRef]
- Martin, R.A.; Gates, N.S.; Ning, A.; Hedengren, J.D. Dynamic Optimization of High-Altitude Long-Endurance Aircraft Trajectories Under Station-Keeping Constraints. J. Guid. Control Dyn. 2019, 42, 538–552. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.Q.; Ma, D.L.; Yang, M.Q.; Zhang, L.; Li, G.X. Flight strategy optimization of high-altitude long-endurance solar-powered aircraft based on Gauss pseudo-spectral method. Chin. J. Aeronaut. 2019. [Google Scholar] [CrossRef]
- Gao, X.-Z.; Hou, Z.-X.; Guo, Z.; Chen, X.-Q.; Chen, X.-Q. Joint optimization of battery mass and flight trajectory for high-altitude solar-powered aircraft. Proc. Inst. Mech. Eng. Part G: J. Aerosp. Eng. 2014, 228, 2439–2451. [Google Scholar] [CrossRef]
- Minzner, R.A. The 1976 Standard Atmosphere and its relationship to earlier standards. Rev. Geophys. 1977, 15, 375. [Google Scholar] [CrossRef]
- A Sample Atmosphere Table(US Units). Available online: http://www.pdas.com/atmosTable2US.html (accessed on 9 July 2017).
- Reda, I.; Andreas, A. Solar position algorithm for solar radiation applications. Sol. Energy 2004, 76, 577–589. [Google Scholar] [CrossRef]
- Aslam, M.; Lee, J.-M.; Kim, H.-S.; Lee, S.-J.; Hong, S. Deep Learning Models for Long-Term Solar Radiation Forecasting Considering Microgrid Installation: A Comparative Study. Energies 2019, 13, 147. [Google Scholar] [CrossRef] [Green Version]
- Cao, X.Q. Optimal control for a chaotic system by means of Gauss pseudospectral method. Acta Phys. Sin. 2013, 62, 1–6. [Google Scholar]
- Hosseini, M.M. A modified pseudospctral methods for numerical solution of ordinary differential equations systems. Appl. Math. Comput. 2006, 176, 470–475. [Google Scholar]
- Michael, A.P.; Rao, A.V. GPOPS-2: A MATLAB Software for Solving Multiple-Phase Optimal Control Problems Using hp-Adaptive Gaussian Quadrature Collocation Methods and Sparse Nonlinear Programming. ACM Trans. Math. Softw. 2014, 41, 1–33. [Google Scholar]
- Sun, Y.; Zhang, M. Optimal reentry range trajectory of hypersonic vehicle by Gauss Pseudospectral Method. In Proceedings of the 2011 2nd International Conference on Intelligent Control and Information Processing, Guilin, China, 25–28 July 2011; Volume 1, pp. 545–549. [Google Scholar]
- Gao, X.-Z.; Hou, Z.-X.; Guo, Z.; Wang, P.; Zhang, J.-T. Research on characteristics of gravitational gliding for high-altitude solar-powered unmanned aerial vehicles. Proc. Inst. Mech. Eng. Part G: J. Aerosp. Eng. 2012, 227, 1911–1923. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (°) | −6 | −5 | −4 | −3 | −2 | −1 | 0 | 1 | 2 | 3 |
| 0.0789 | 0.226 | 0.3815 | 0.5343 | 0.6464 | 0.7596 | 0.8763 | 0.9906 | 1.0971 | 1.2013 | |
| 0.0344 | 0.0204 | 0.0162 | 0.0132 | 0.014 | 0.0145 | 0.0146 | 0.0148 | 0.0149 | 0.0152 | |
| (°) | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 1.3039 | 1.3961 | 1.4721 | 1.5644 | 1.6309 | 1.6707 | 1.6853 | 1.6725 | 1.6659 | 1.6776 | |
| 0.0156 | 0.016 | 0.0162 | 0.0177 | 0.0196 | 0.0224 | 0.0272 | 0.0357 | 0.0463 | 0.0569 |
| Parameter | Value | Description |
|---|---|---|
| (kg) | 37 | Mass of structure |
| (kg) | 16 | Battery mass |
| (Wh/kg) | 350 | Energy density of battery |
| (m) | 22.5 | Span length |
| (m2) | 25.3 | Wing area |
| (m2) | 20.24 | Area of photovoltaic cells |
| (-) | 0.2 | efficiency of photovoltaic cell |
| (-) | 0.9 | Efficiency of MPPT |
| (-) | 0.85 | efficiency of aircraft motor |
| (-) | 0.8 | efficiency of aircraft propeller |
| (-) | 0.9 | Efficiency of battery for charging |
| (-) | 0.9 | Efficiency of battery for discharging |
| Parameter | Value | Description |
|---|---|---|
| (km) | 15 | Cruising altitude |
| (km) | 23 | Battery mass |
| 0.05 | Initial battery percentage | |
| (-) | 266 | Autumn equinox day number |
| (°) | 4 | Latitude of the starting point |
| (°) | 105 | Longitude of starting point |
| (h) | 6.8611 | The sunrise time |
| (h) | 12.8564 | The standard noon time |
| (h) | 18.8517 | The sunset time |
| Parameter | Minimum Value | Maximum Value |
|---|---|---|
| (km) | 15 | 30 |
| (m/s) | 0 | 50 |
| 0.05 | 0.99 | |
| (°) | 4 | 15 |
| (°) | 105 | 11 |
| (°) | 5 | 10 |
| (°) | -15 | 15 |
| (°) | -1 | 1 |
| (N) | 0 | 1000 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, M.; Ji, X.; Sun, K.; Zhu, M. Flight Strategy Optimization for High-Altitude Solar-Powered Aircraft Based on Gravity Energy Reserving and Mission Altitude. Appl. Sci. 2020, 10, 2243. https://doi.org/10.3390/app10072243
Sun M, Ji X, Sun K, Zhu M. Flight Strategy Optimization for High-Altitude Solar-Powered Aircraft Based on Gravity Energy Reserving and Mission Altitude. Applied Sciences. 2020; 10(7):2243. https://doi.org/10.3390/app10072243
Chicago/Turabian StyleSun, Mou, Xinzhe Ji, Kangwen Sun, and Ming Zhu. 2020. "Flight Strategy Optimization for High-Altitude Solar-Powered Aircraft Based on Gravity Energy Reserving and Mission Altitude" Applied Sciences 10, no. 7: 2243. https://doi.org/10.3390/app10072243
APA StyleSun, M., Ji, X., Sun, K., & Zhu, M. (2020). Flight Strategy Optimization for High-Altitude Solar-Powered Aircraft Based on Gravity Energy Reserving and Mission Altitude. Applied Sciences, 10(7), 2243. https://doi.org/10.3390/app10072243