Analyzing the Improvements of Energy Management Systems for Hybrid Electric Vehicles Using a Systematic Literature Review: How Far Are These Controls from Rule-Based Controls Used in Commercial Vehicles?





Abstract
Featured Application
Abstract
1. Introduction
Literature Review
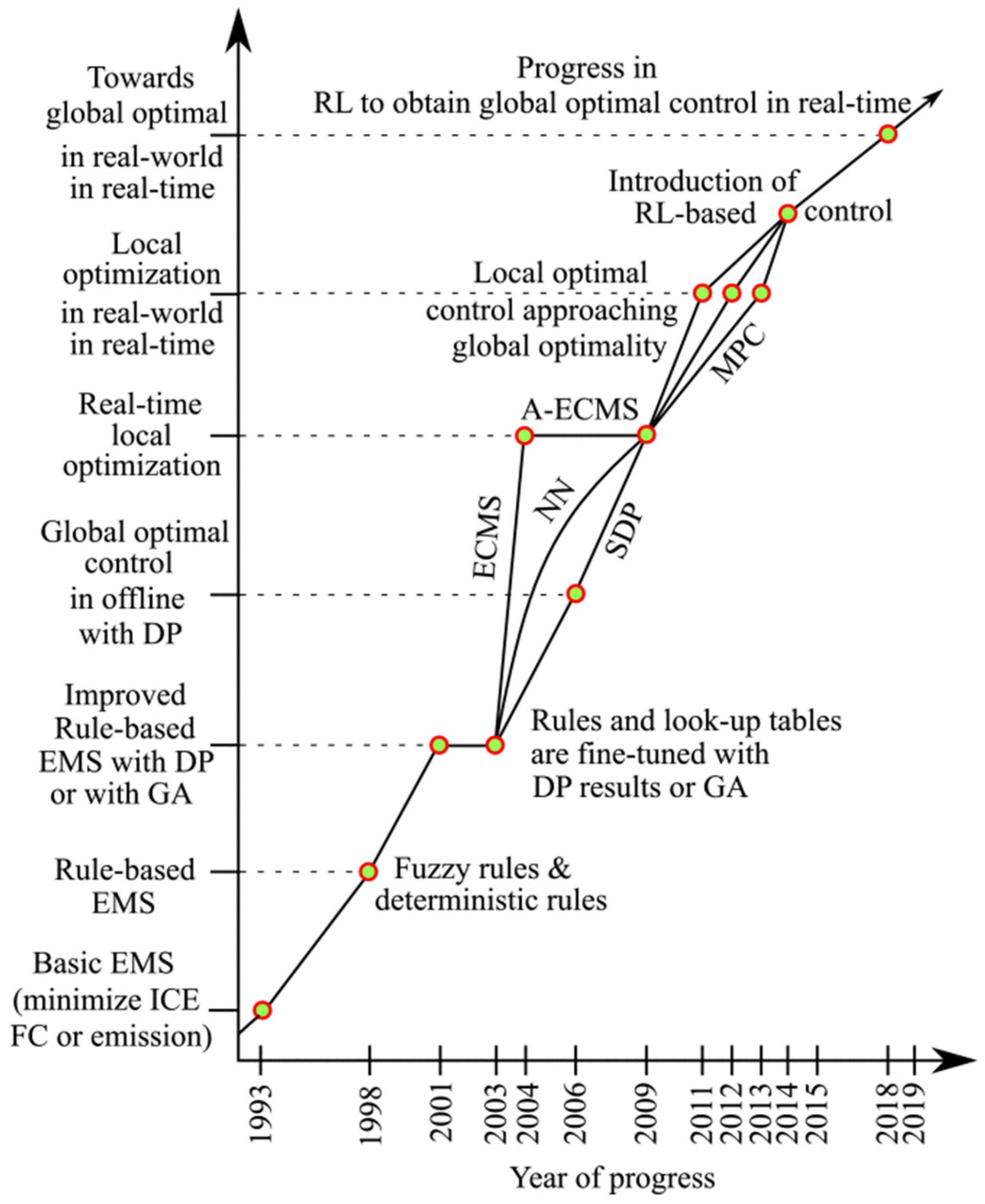
“The rule-based strategy can be regarded as the first level, due to its convenience in adjusting parameters, its simplicity, and its practicality, while the DP-based strategy can be regarded as the last level, due to its being time consuming and requiring a tremendous amount of memory. ECMS and the MPC-based strategy, as instantaneous strategies, can be considered as the second level. Meanwhile, the ADP-based strategy (containing the RL-based strategy and the NDP-based strategy) can be implemented based on updating data, and can therefore be regarded as the second level. The SDP-based strategy can be regarded as the third level, while the PMP-based strategy can be considered as the fourth level due to the difficulty it has in solving the Hamiltonian function.”
- How far are the proposed EMSs with respect to the RB EMSs that are implemented in the HEV industry?
- Is it possible to quantify how these strategies are moving closer to the optimum?
- Would it be possible to identify the technologies that obtain the best results?
2. Methods
- TI = (hybrid electric vehicle OR plug-in hybrid electric vehicle OR hybrid electric vehicle OR HEV OR PHEV) AND TI = (energy management OR control) NOT TI = (fuel cell OR FCV)
3. Results
3.1. Analysis and Synthesis
3.1.1. RB EMSs
3.1.2. ECMS EMSs
3.1.3. MPC EMSs
3.1.4. OB EMSs
3.1.5. LB EMSs
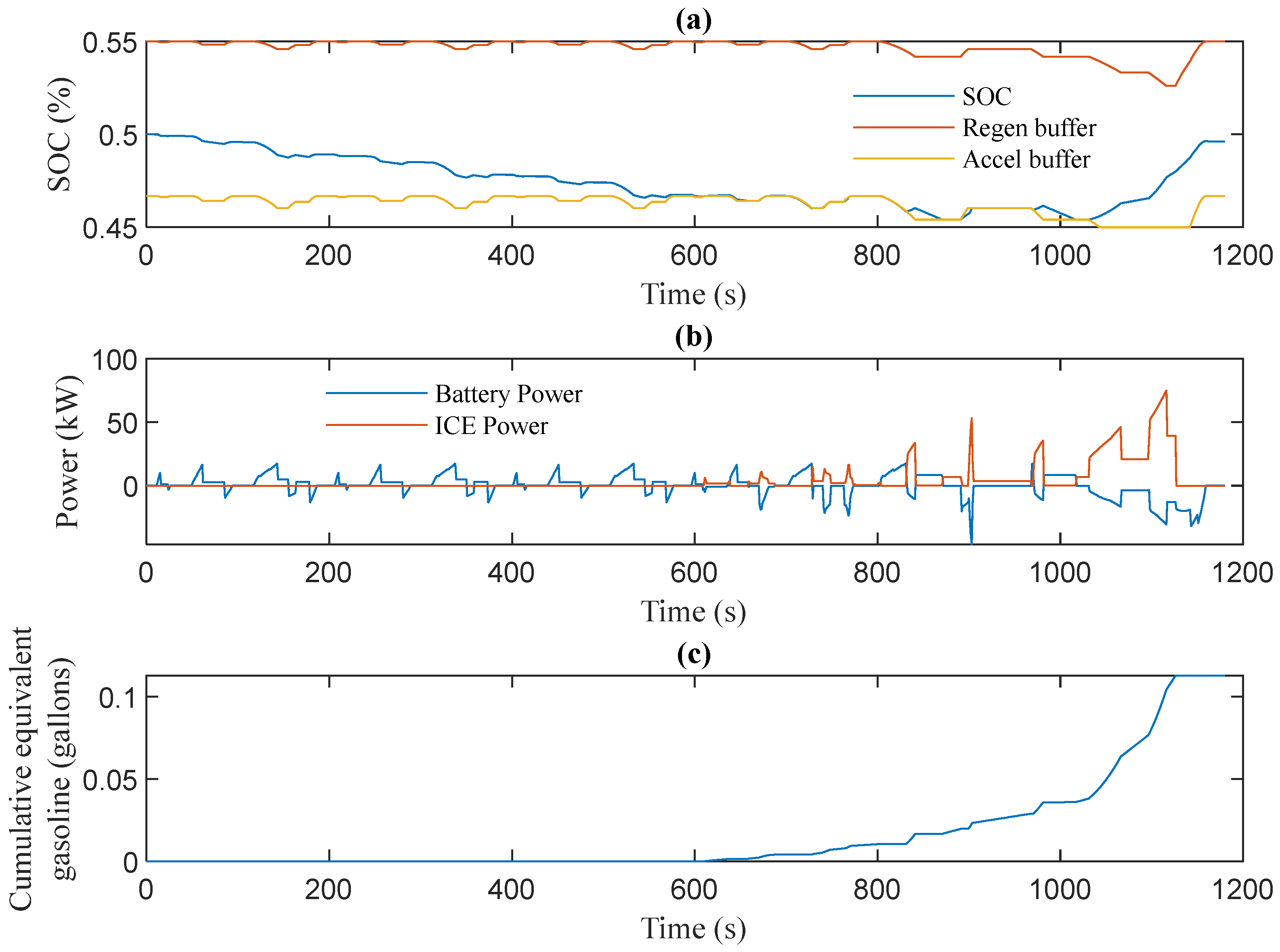
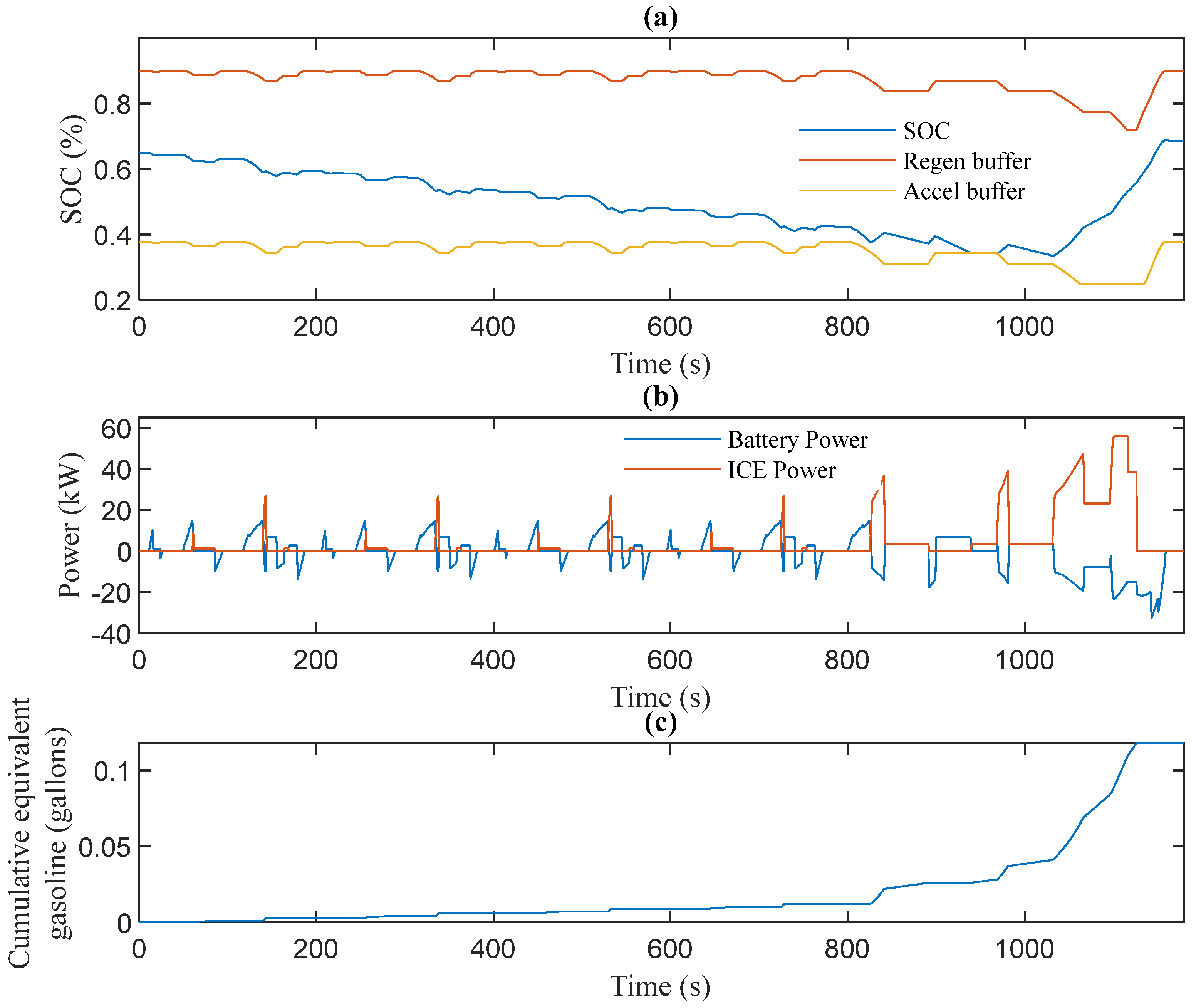
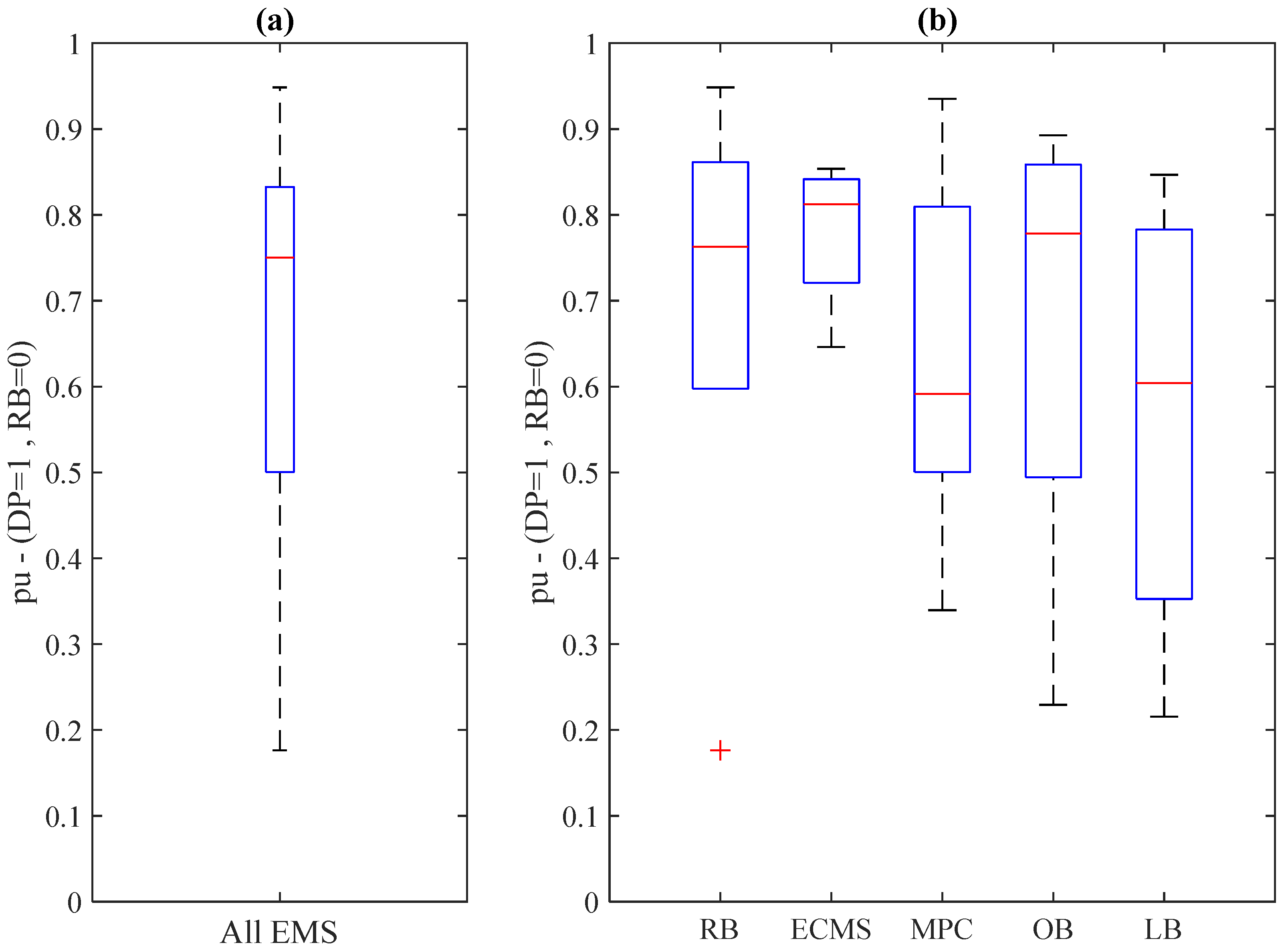
3.1.6. Simulation Results
4. Discussion
5. Conclusions
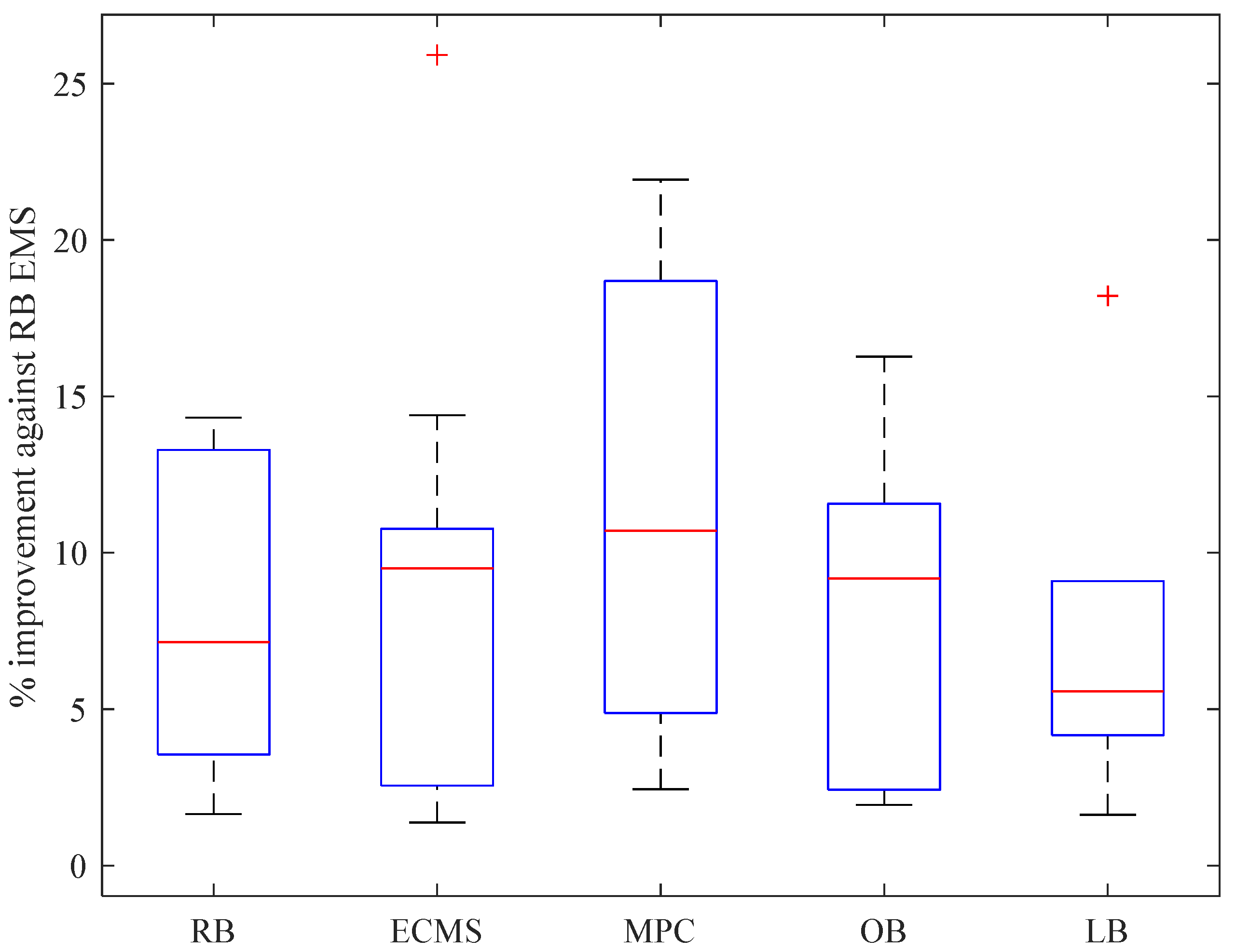
- The most novel EMSs presented improvements roughly between 5 and 10% from those currently implemented in the HEV industry;
- Using the common RB EMSs and DP as benchmarks, it can be concluded that the EMSs that are being developed currently are nearer to the optimum than the common RB EMSs;
- Since the results of the different technologies are close, it would be interesting to focus on their capacity to be implemented in real-time controllers and encounter scenarios with frequent disturbances.
Author Contributions
Funding
Conflicts of Interest
Appendix A
- Battery minimum SOC;
- Battery maximum SOC;
- Level of discharge aimed at improving the fuel converter efficiency;
- Level of charge aimed at improving the fuel converter efficiency;
- Speed at which the battery energy reserved to assist acceleration reaches zero;
- Percentage of usable battery energy reserved to assist acceleration;
- Speed at which the fuel converter is turned on;
- Power at which the fuel converter is turned on.

- “cs_lo_soc”: The lowest SOC corresponding to the minimum charge/discharge resistance of the energy storage system module.
- “cs_hi_soc”: This parameter should be set slightly higher than the cs_lo_soc. More specifically, it should be set to a value less than the SOC at which the either the charge or discharge resistance increases dramatically.
- “cs_charge_trq”: Defines the additional torque requested of the fuel converter to maintain an energy storage system SOC between cs_lo_soc and cs_hi_soc.
- “cs_electric_launch”: Below this vehicle speed, the vehicle will operate as a pure electric vehicle; above this speed, the fuel converter will be used as the primary power source.
- “cs_off_trq_frac”: Represents the fraction of max torque at each speed at which the engine should turn off. This parameter should be set to a value equal to the fraction of max torque at each speed at which the fuel converter efficiencies begin to drop dramatically.
- “cs_min_trq_frac”: Represents the minimum fraction of max torque at each speed at which the engine will operate when lower torque fractions are requested. This parameter is typically set to a mid to high value (0.5–0.8) in order to force the fuel converter to operate in a high torque region of its efficiency map.
- I.
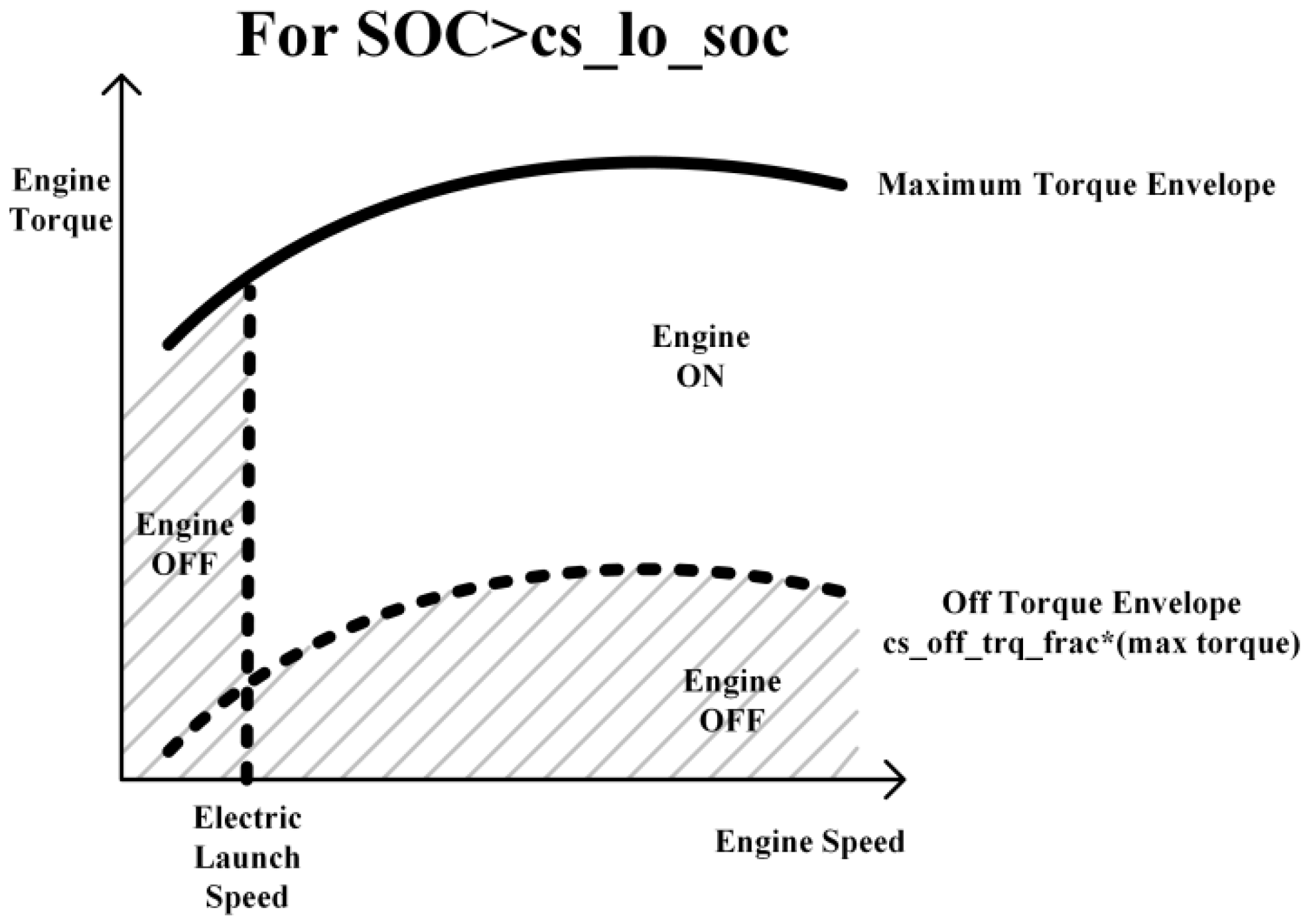
- The state of the engine (on or off) is determined by the following rules (see Figure A1):
- I.1.
- If the speed required is less than the electric launch speed, cs_electric_launch_spd, the engine could turn off.
- I.2.
- If the SOC is higher than its low limit, the engine could turn off. If both the requested speed is less than the launch speed and the SOC is higher than the low limit, the engine will turn off.
- I.3.
- If the torque required is less than a cutoff torque, cs_off_trq_frac fraction of the maximum torque, the engine could turn off. If both the requested torque is lower than this cutoff and the SOC is higher than the low limit, the engine will turn off.
- II.
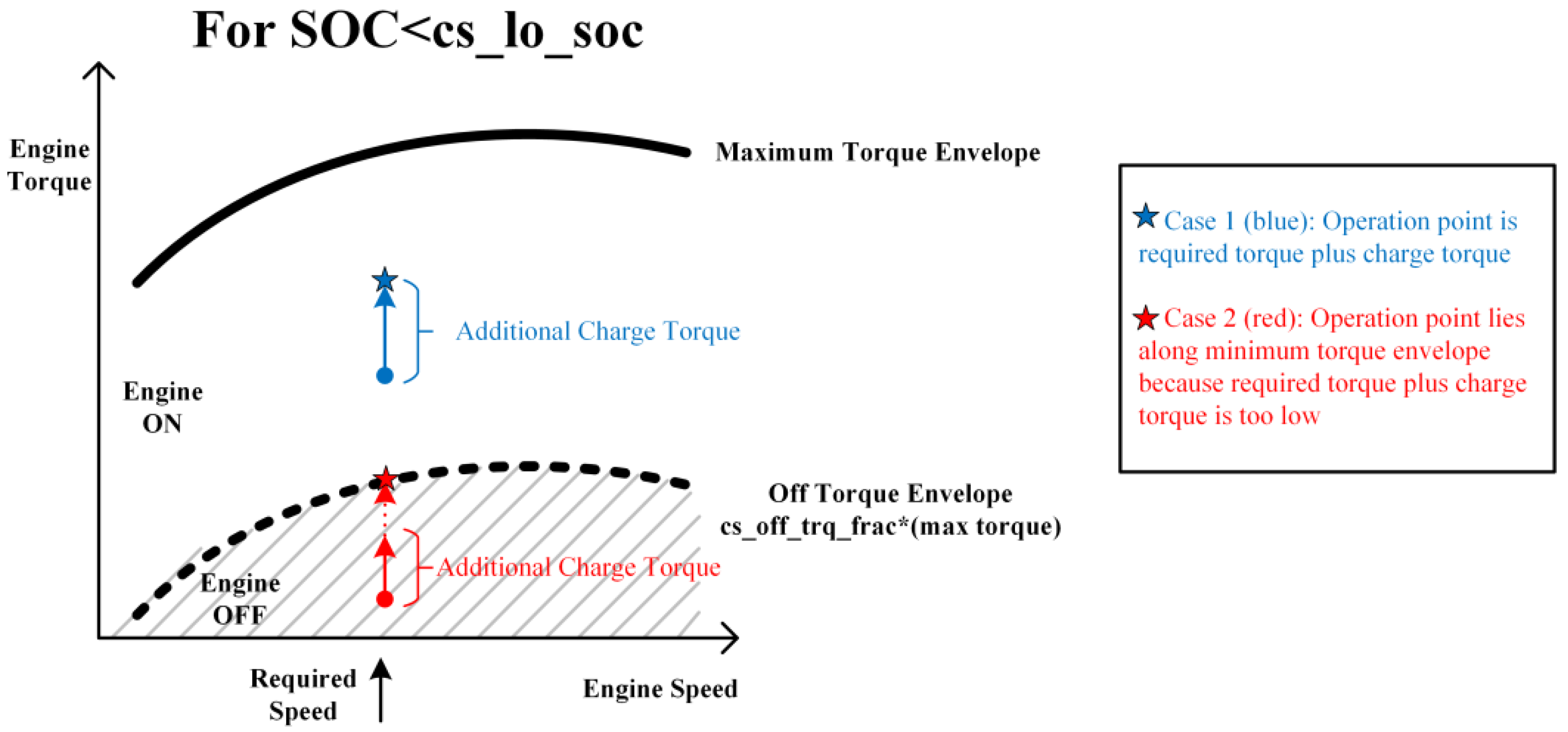
- The torque and speed load due to driving conditions are presented to the engine through the clutch. The energy management strategy determines how the torques from the engine and motor will combine to produce the required torque while maintaining charge in the battery. The process is described below (see also Figure A2):
- II.1.
- When the battery SOC is below cs_soc_lo, additional torque is required from the engine to charge the battery. This additional charging torque is proportional to the difference between SOC and the average of cs_lo_soc and a high limit, cs_hi_soc.
- II.2.
- This engine torque is prevented from being below a certain fraction, cs_min_trq_frac, of the maximum engine torque at the current operating speed. This is intended to prevent the engine from operating at an inefficiently low torque.
- II.3.
- Engine torque is only requested when the engine is on.

References
- European Commission CO2 Emission Performance Standards for Cars and Vans (2020 onwards). Available online: https://ec.europa.eu/clima/policies/transport/vehicles/regulation_en#tab-0-0 (accessed on 1 July 2020).
- European Commission Regulation (EU) 2019/631 of the European Parliament and of the Council of 17 April 2019 Setting CO2 Emission Performance Standards for New Passenger Cars and for New Light Commercial Vehicles, and Repealing; Regulations (EC) No 443/2009 and (EU) No 510/201. 2020. Available online: http://data.europa.eu/eli/reg/2019/631/2020-01-21 (accessed on 1 July 2020).
- Zhuang, W.; Li, E.S.; Zhang, X.; Kum, D.; Song, Z.; Yin, G.; Ju, F. A survey of powertrain configuration studies on hybrid electric vehicles. Appl. Energy 2020, 262, 114553. [Google Scholar] [CrossRef]
- Beatrice, C.; Di Blasio, G.; Belgiorno, G. Experimental analysis of functional requirements to exceed the 100kW / l in high-speed light-duty diesel engines. Fuel 2017, 207, 591–601. [Google Scholar] [CrossRef]
- Belgiorno, G.; Boscolo, A.; Dileo, G.; Numidi, F.; Pesce, F.C.; Vassallo, A.; Ianniello, R.; Beatrice, C.; Di Blasio, G. Experimental Study of Additive-Manufacturing-Enabled Innovative Diesel Combustion Bowl Features for Achieving Ultra-Low Emissions and High Efficiency. In Proceedings of the CO2 Reduction for Transportation Systems Conference, Politecnico di Torino, Italy, 7–9 July 2020; SAE International: Warrendale, PA, USA, 2020. [Google Scholar]
- Onori, S.; Serrao, L.; Rizzoni, G. Hybrid Electric Vehicles: Energy Management Strategies, 1st ed.; Springer: London, UK, 2016. [Google Scholar]
- de Jager, B.; van Keulen, T.; Kessels, J. Optimal Control of Hybrid. Vehicles, 1st ed.; Springer: London, UK, 2013. [Google Scholar]
- Xu, N.; Kong, Y.; Chu, L.; Ju, H.; Yang, Z.; Xu, Z.; Xu, Z. Towards a smarter energy management system for hybrid vehicles: A comprehensive review of control strategies. Appl. Sci. 2019, 9, 2026. [Google Scholar] [CrossRef]
- Biswas, A.; Emadi, A. Energy management systems for electrified powertrains: State-of-the-art review and future trends. IEEE Trans. Veh. Technol. 2019, 68, 6453–6467. [Google Scholar] [CrossRef]
- Tran, D.D.; Vafaeipour, M.; El Baghdadi, M.; Barrero, R.; Van Mierlo, J.; Hegazy, O. Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: Topologies and integrated energy management strategies. Renew. Sustain. Energy Rev. 2020, 119, 109596. [Google Scholar] [CrossRef]
- Martinez, C.M.; Hu, X.; Cao, D.; Velenis, E.; Gao, B.; Wellers, M. Energy Management in Plug-in Hybrid Electric Vehicles: Recent Progress and a Connected Vehicles Perspective. IEEE Trans. Veh. Technol. 2017, 66, 4534–4549. [Google Scholar] [CrossRef]
- Brooker, A.; Gonder, J.; Wang, L.; Wood, E.; Lopp, S.; Ramroth, L. FASTSim: A Model to Estimate Vehicle Efficiency, Cost and Performance; NREL Publications: Washington, DC, USA, 2015. [Google Scholar]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G.; Group, T.P. Preferred Reporting Items for Systematic Reviews and Meta-Analyses: The PRISMA Statement. PLoS Med. 2009, 6, e1000097. [Google Scholar] [CrossRef]
- Higgins, J.P.; Thomas, J.; Chandler, J.; Cumpston, M.; Li, T.; Page, M.J.; Welch, V.A. Cochrane Handbook for Systematic Reviews of Interventions, 2nd ed.; John Wiley & Sons: Chichester, UK, 2019. [Google Scholar]
- Li, X. Torque-Leveling Threshold-Changing Rule-Based. IEEE Trans. Veh. Technol. 2019, 68, 6509–6523. [Google Scholar] [CrossRef]
- Yin, C.; Wang, S.; Yu, C.; Li, J. Fuzzy optimization of energy management for power split hybrid electric vehicle based on particle swarm optimization algorithm. Adv. Mech. Eng. 2019, 11, 12. [Google Scholar] [CrossRef]
- Du, W.; Zhao, S.; Jin, L.; Gao, J.; Li, H. Parameter optimization of rule-based control strategy for multi-mode hybrid electric vehicle. J. Automob. Eng. 2020. [Google Scholar] [CrossRef]
- Lei, Z.; Qin, D.; Zhao, P.; Li, J.; Liu, Y.; Chen, Z. A real-time blended energy management strategy of plug-in hybrid electric vehicles considering driving conditions CD-CS. J. Clean. Prod. 2020, 252, 119735. [Google Scholar] [CrossRef]
- Buccoliero, G.; Anselma, P.G.; Bonab, S.A.; Belingardi, G.; Emadi, A. A New Energy Management Strategy for Multimode Power-Split Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 172–181. [Google Scholar] [CrossRef]
- Liu, X.; Qin, D.; Wang, S. Minimum Energy Management Strategy of Equivalent Fuel Consumption of Hybrid Electric Vehicle Based on Improved Global Optimization Equivalent Factor. Energies 2019, 12, 2076. [Google Scholar] [CrossRef]
- Shaolin, Q.; Lihong, Q.; Lijun, Q.; Pierluigi, P. Simulation Modelling Practice and Theory Hierarchical energy management control strategies for connected hybrid electric vehicles considering efficiencies feedback. Simul. Model. Pract. Theory 2019, 90, 1–15. [Google Scholar]
- Park, T.; Lee, H. Optimal Supervisory Control Strategy for a Transmission-mounted Electric Drive Hybrid Electric Vehicle. Int. J. Automot. Technol. 2019, 20, 663–677. [Google Scholar] [CrossRef]
- Wu, J.; Ruan, J.; Zhang, N.; Walker, P.D. An Optimized Real-Time Energy Management Strategy for the Power-Split Hybrid Electric Vehicles. IEEE Trans. Control. Syst. Technol. 2019, 27, 1194–1202. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, S.; Shi, D.; Sun, X.; He, J. Research on instantaneous optimal control of the hybrid electric vehicle with planetary gear sets. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 51. [Google Scholar] [CrossRef]
- Qiao, Y.; Song, Y.; Huang, K. A Novel Control Algorithm Design for Hybrid Electric Vehicles Considering Energy Consumption and Emission Performance. Energies 2019, 12, 2698. [Google Scholar] [CrossRef]
- Ekhtiari, S.; Faieghi, M.; Azad, N.L. Sensitivity Analysis of a Real-Time Trip Planning Assisted Energy Management System for Connected Plug-In Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 7340–7352. [Google Scholar] [CrossRef]
- Han, L.; Jiao, X. Recurrent Neural Network-Based Adaptive Energy Management Control Strategy of Plug-In Hybrid Electric Vehicles Considering Battery Aging. Energies 2020, 13, 202. [Google Scholar] [CrossRef]
- Li, Y.; Jiao, X. Energy management strategy for hybrid electric vehicles based on adaptive equivalent consumption minimization strategy and mode switching with variable thresholds. Sci. Prog. 2020, 103, 20. [Google Scholar] [CrossRef]
- Xie, S.; Hu, X.; Qi, S.; Tang, X.; Lang, K.; Xin, Z.; Brighton, J. Model predictive energy management for plug-in hybrid electric vehicles considering optimal battery depth of discharge. Energy 2019, 173, 667–678. [Google Scholar] [CrossRef]
- Zhang, S.I.; Dou, W.; Zhang, Y.; Hao, W.; Chen, Z.; Member, S.; Liu, Y. A Vehicle-Environment Cooperative Control Based Velocity Profile Prediction Method and Case Study in Energy Management of Plug-in Hybrid Electric Vehicles. IEEE Access 2019, 7, 75965–75975. [Google Scholar] [CrossRef]
- Yuan, J.; Yang, L. Predictive energy management strategy for connected 48V hybrid electric vehicles. Energy 2019, 187, 115952. [Google Scholar] [CrossRef]
- Li, X.; Han, L.; Liu, H.; Wang, W.; Xiang, C. Real-time optimal energy management strategy for a dual-mode power-split hybrid electric vehicle based on an explicit model predictive control algorithm. Energy 2019, 172, 1161–1178. [Google Scholar] [CrossRef]
- Zhang, Y.; Chu, L.; Ding, Y.A.N.; Xu, N.A.N.; Fu, Z.; Xu, L.E.I.; Tang, X.I.N.; Liu, Y.; Guo, C. A Hierarchical Energy Management Strategy Based on Model Predictive Control for Plug-In Hybrid Electric Vehicles. IEEE Access 2019, 7, 81612–81629. [Google Scholar] [CrossRef]
- Xie, S.; Qi, S.; Lang, K.; Tang, X.; Lin, X. Coordinated management of connected plug-in hybrid electric buses for energy saving, inter-vehicle safety, and battery health. Appl. Energy 2020, 268, 115028. [Google Scholar] [CrossRef]
- Pu, Z.; Jiao, X.; Fang, S.; Yang, C. An Adaptive Stochastic Model Predictive Control Strategy for Plug-in Hybrid Electric Bus During Vehicle-Following Scenario. IEEE Access 2020, 8, 13887–13897. [Google Scholar] [CrossRef]
- Zhang, H.; Shi, D.; Cai, Y.; Zhou, W.; Yang, H. Research on Transmission Efficiency Oriented Predictive Control of Power Split Hybrid Electric Vehicle. Math. Probl. Eng. 2020, 2020, 7024740. [Google Scholar]
- Li, J.; Zhou, Q.; He, Y.; Shuai, B.; Li, Z.; Williams, H.; Xu, H. Dual-loop online intelligent programming for driver-oriented predict energy management of plug-in hybrid electric vehicles. Appl. Energy 2019, 253, 113617. [Google Scholar] [CrossRef]
- Anselma, P.G.; Huo, Y.; Roeleveld, J.; Belingardi, G.; Emadi, A. Integration of On-Line Control in Optimal Design of Multimode Power-Split Hybrid Electric Vehicle Powertrains. IEEE Trans. Veh. Technol. 2019, 68, 3436–3445. [Google Scholar] [CrossRef]
- Shabbir, W.; Evangelou, S.A. Threshold-changing control strategy for series hybrid electric vehicles. Appl. Energy 2019, 235, 761–775. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, J.; Xu, X.; Cai, Y.; Zhou, Z.; Sun, X. A comprehensive dynamic efficiency-enhanced energy management strategy for plug-in hybrid electric vehicles. Appl. Energy 2019, 247, 657–669. [Google Scholar] [CrossRef]
- Guo, H.; Lu, S.; Hui, H.; Bao, C.; Shangguan, J. Receding horizon control-based energy management for plug-in hybrid electric buses using a predictive model of terminal SOC constraint in consideration of stochastic vehicle mass. Energy 2019, 176, 292–308. [Google Scholar] [CrossRef]
- Yao, M.; Qin, D.; Zhou, X.; Zhan, S.; Zeng, Y. Integrated optimal control of transmission ratio and power split ratio for a CVT-based plug-in hybrid electric vehicle. Mech. Mach. Theory 2019, 136, 52–71. [Google Scholar] [CrossRef]
- Li, G.; Görges, D. Energy management strategy for parallel hybrid electric vehicles based on approximate dynamic programming and velocity forecast. J. Frankl. Inst. 2019, 356, 9502–9523. [Google Scholar] [CrossRef]
- Li, G.; Görges, D. Ecological Adaptive Cruise Control and Energy Management Strategy for Hybrid Electric Vehicles Based on Heuristic Dynamic Programming. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3526–3535. [Google Scholar] [CrossRef]
- Hwang, H.; Chen, J.-S. Optimized Fuel Economy Control of Power-Split Hybrid Electric Vehicle with Particle Swarm Optimization. Energies 2020, 13, 2278. [Google Scholar] [CrossRef]
- Liu, T.; Hu, X.; Hu, W.; Zou, Y. A Heuristic Planning Reinforcement Learning-Based Energy Management for Power-Split Plug-in Hybrid Electric Vehicles. IEEE Trans. Ind. Inform. 2019, 15, 6436–6445. [Google Scholar] [CrossRef]
- Yin, Y.; Ran, Y.; Zhang, L.; Pan, X.; Luo, Y. An Energy Management Strategy for a Super-Mild Hybrid Electric Vehicle Based on a Known Model of Reinforcement Learning. J. Control. Sci. Eng. 2019, 2019, 9259712. [Google Scholar] [CrossRef]
- Guo, H.; Liu, C.; Yong, J.; Muhammad, F. Model Predictive Iterative Learning Control for Energy Management of Plug-In Hybrid Electric Vehicle. IEEE Access 2019, 7, 71323–71334. [Google Scholar] [CrossRef]
- Lian, R.; Peng, J.; Wu, Y.; Tan, H.; Zhang, H. Rule-interposing deep reinforcement learning based energy management strategy for power-split hybrid electric vehicle. Energy 2020, 197, 117297. [Google Scholar] [CrossRef]
- Xu, B.; Rathod, D.; Zhang, D.; Yebi, A.; Zhang, X.; Li, X.; Filipi, Z. Parametric study on reinforcement learning optimized energy management strategy for a hybrid electric vehicle. Appl. Energy 2020, 259, 114200. [Google Scholar] [CrossRef]
- Anselma, P.G.; Huo, Y.; Roeleveld, J.; Belingardi, G.; Emadi, A. Slope-Weighted Energy-Based Rapid Control Analysis for Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 4458–4466. [Google Scholar] [CrossRef]
- Liu, T.; Yu, H.; Guo, H.; Qin, Y.; Zou, Y. Online Energy Management for Multimode Plug-In Hybrid Electric Vehicles. IEEE Trans. Ind. Inform. 2019, 15, 4352–4361. [Google Scholar] [CrossRef]
- Gonder, J.; Brooker, A.; Wood, E.; Moniot, M.; Gonder, J.; Brooker, A.; Wood, E.; Moniot, M. Future Automotive Systems Technology Simulator (FASTSim) Validation Report; NREL Publications: Washington, DC, USA, 2018. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| INTRODUCTION |
|---|
|
| METHODS |
|
| RESULTS |
|
| DISCUSSION |
|
| plug-in hybrid electric vehicle, hybrid electric vehicle, plug-in hybrid electric vehicle (PHEV), hybrid electric vehicle (HEV), power-split HEV, 48 V hybrid electric vehicle, parallel hybrid electric vehicle, power split hybrid electric vehicle, multi-modal hybrid electric vehicle, hybrid, 48 V mild hybrid electric vehicle, connected plug-in hybrid electric vehicle | energy management, energy management strategy, real-time energy management strategy, HEV energy management, control strategy, multi-objective energy management, hybrid electric vehicle energy management | rule-based control, model predictive control, Pontryagin’s minimum principle, Q-learning, reinforcement learning, dynamic programming, equivalent consumption minimization strategy, ECMS, optimal control, on-line optimal control, real time optimization, charge sustaining control |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torreglosa, J.P.; Garcia-Triviño, P.; Vera, D.; López-García, D.A. Analyzing the Improvements of Energy Management Systems for Hybrid Electric Vehicles Using a Systematic Literature Review: How Far Are These Controls from Rule-Based Controls Used in Commercial Vehicles? Appl. Sci. 2020, 10, 8744. https://doi.org/10.3390/app10238744
Torreglosa JP, Garcia-Triviño P, Vera D, López-García DA. Analyzing the Improvements of Energy Management Systems for Hybrid Electric Vehicles Using a Systematic Literature Review: How Far Are These Controls from Rule-Based Controls Used in Commercial Vehicles? Applied Sciences. 2020; 10(23):8744. https://doi.org/10.3390/app10238744
Chicago/Turabian StyleTorreglosa, Juan P., Pablo Garcia-Triviño, David Vera, and Diego A. López-García. 2020. "Analyzing the Improvements of Energy Management Systems for Hybrid Electric Vehicles Using a Systematic Literature Review: How Far Are These Controls from Rule-Based Controls Used in Commercial Vehicles?" Applied Sciences 10, no. 23: 8744. https://doi.org/10.3390/app10238744
APA StyleTorreglosa, J. P., Garcia-Triviño, P., Vera, D., & López-García, D. A. (2020). Analyzing the Improvements of Energy Management Systems for Hybrid Electric Vehicles Using a Systematic Literature Review: How Far Are These Controls from Rule-Based Controls Used in Commercial Vehicles? Applied Sciences, 10(23), 8744. https://doi.org/10.3390/app10238744