Line of Sight and Image Motion Compensation for Step and Stare Imaging System


Abstract
:Featured Application
Abstract
1. Introduction
2. Step and Stare Imaging System
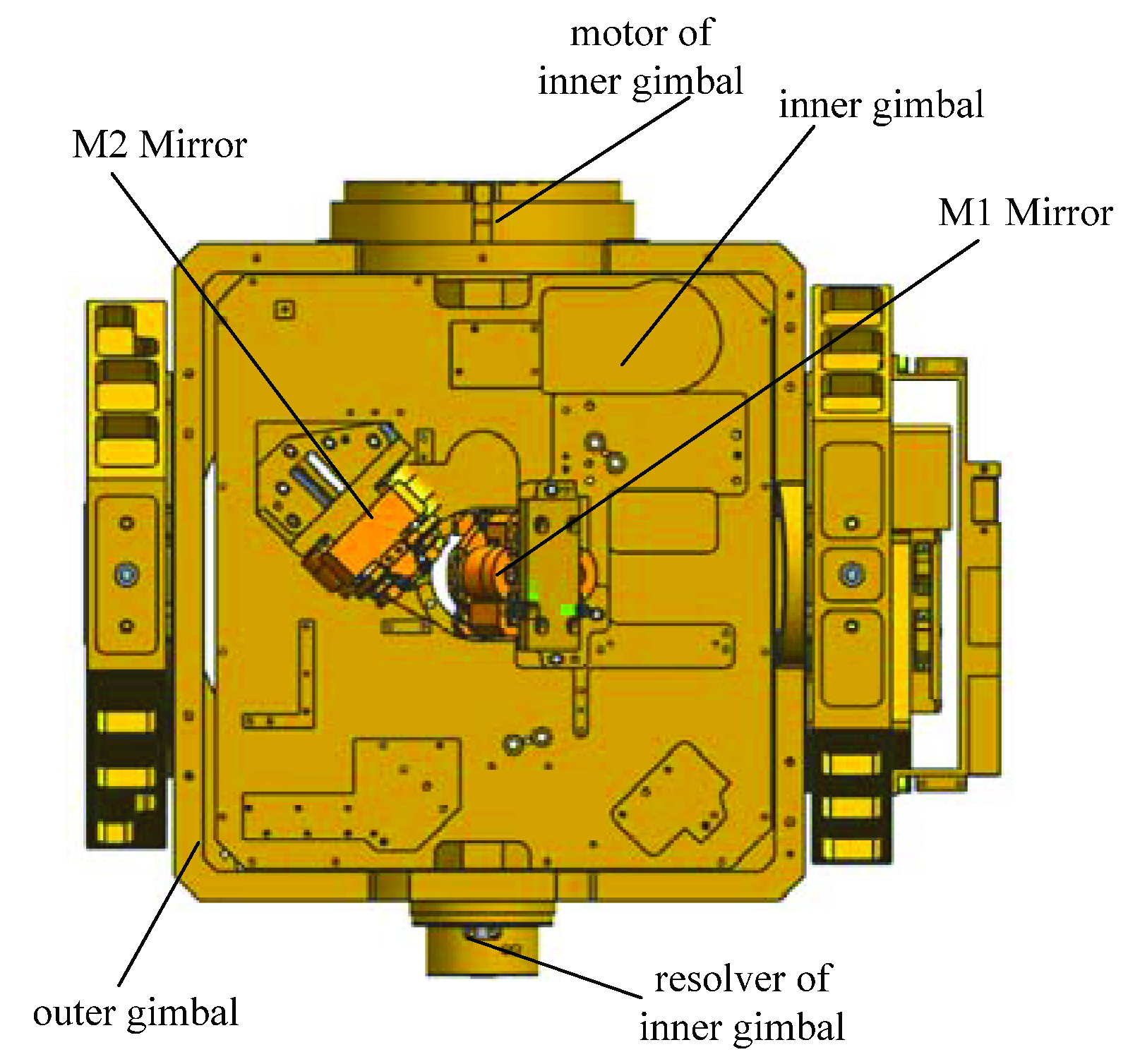
2.1. System Components and Operating Principle
2.2. Imaging Optics Path
3. LOS and Motion Compensation Kinematics and Algorithm
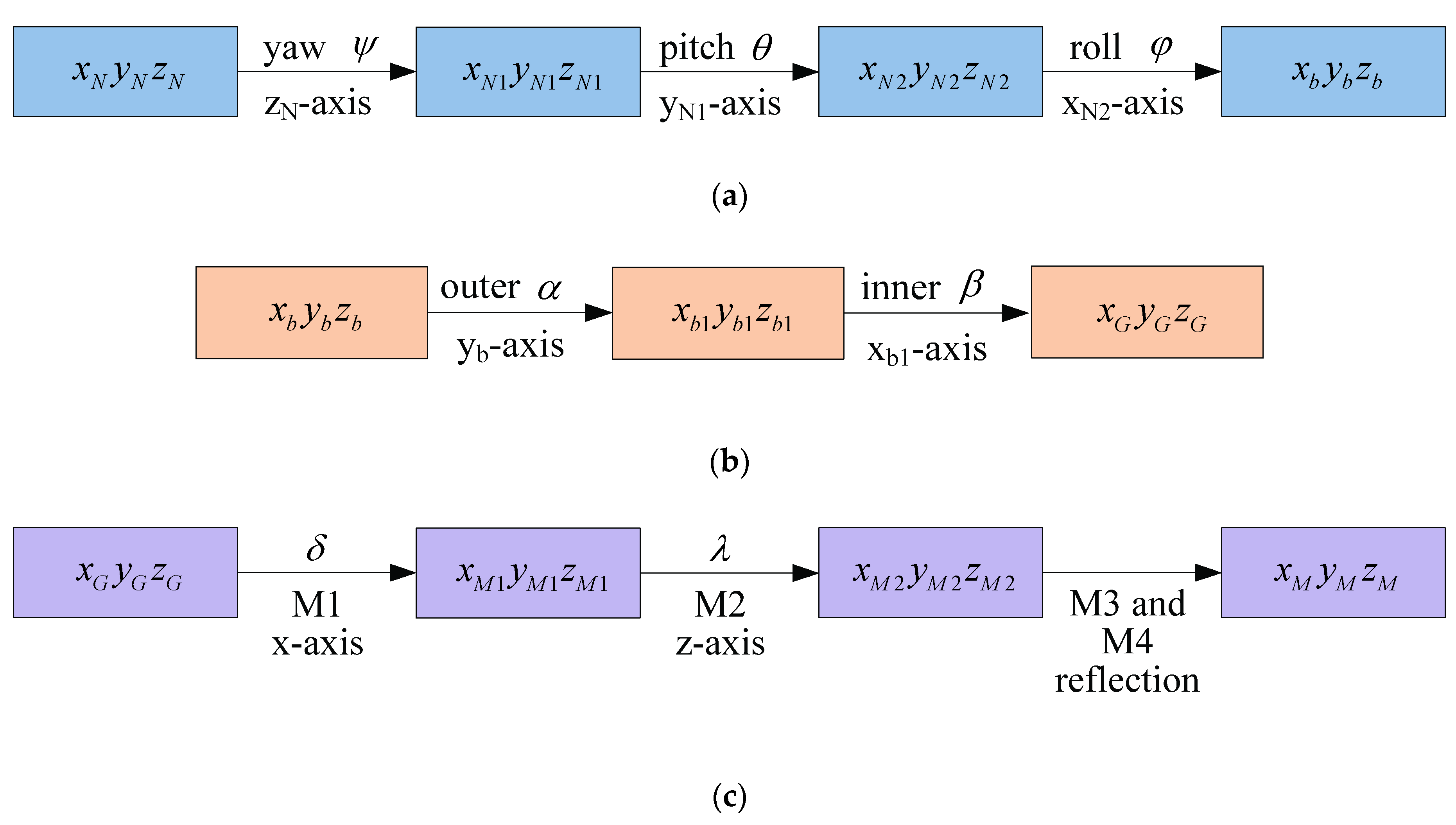
3.1. Coordinate Frames
3.2. Analysis of Coordinate Transformation
3.3. LOS Command Angle
3.4. Image Motion Compensation
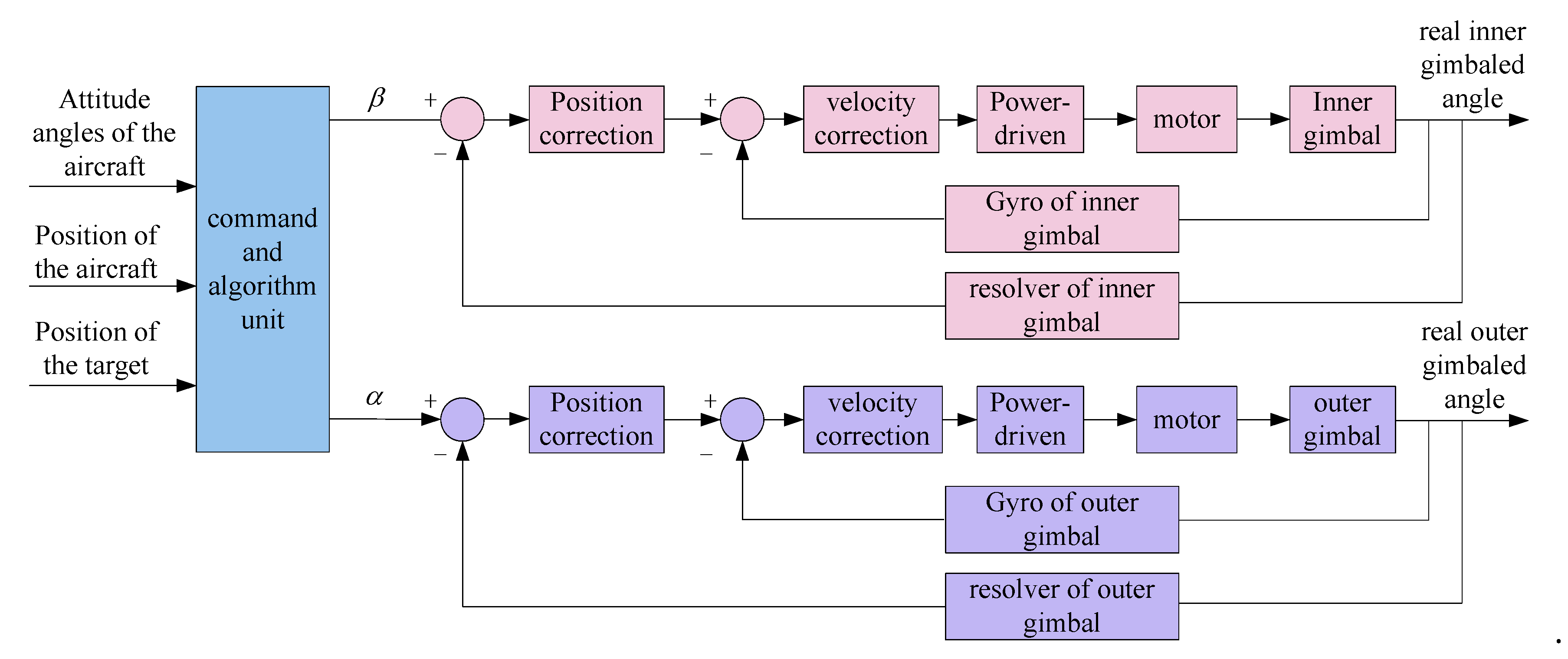
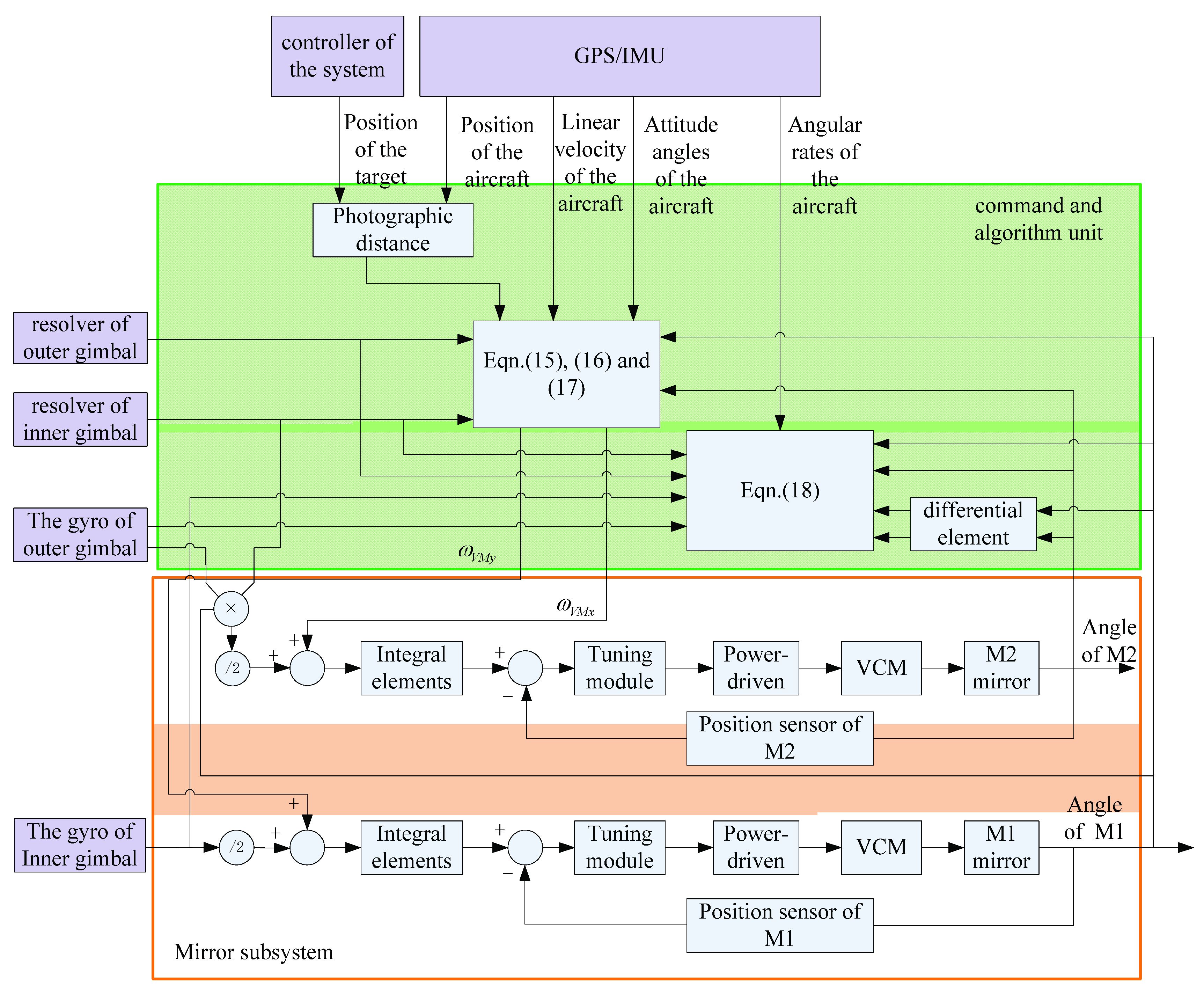
3.5. Control Process
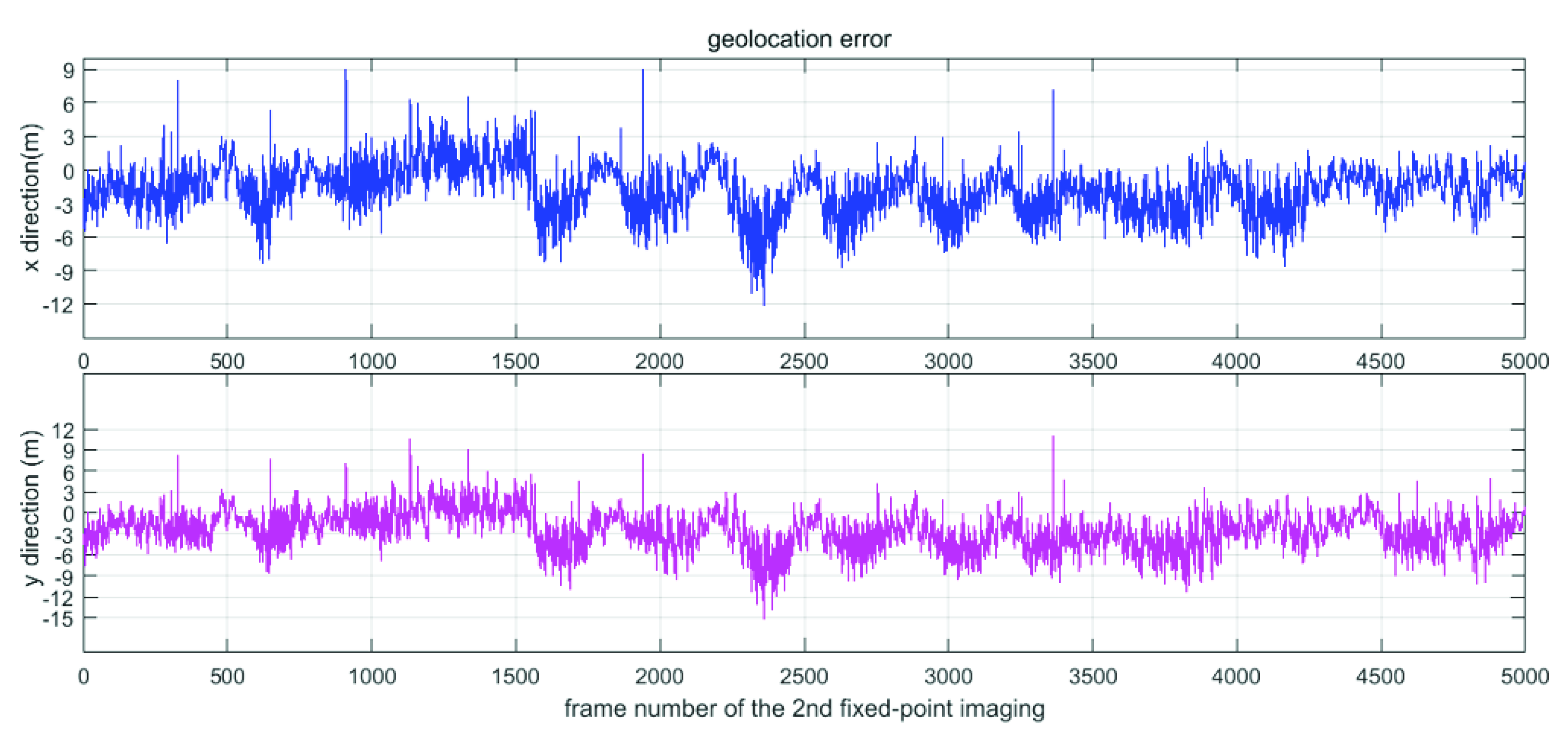
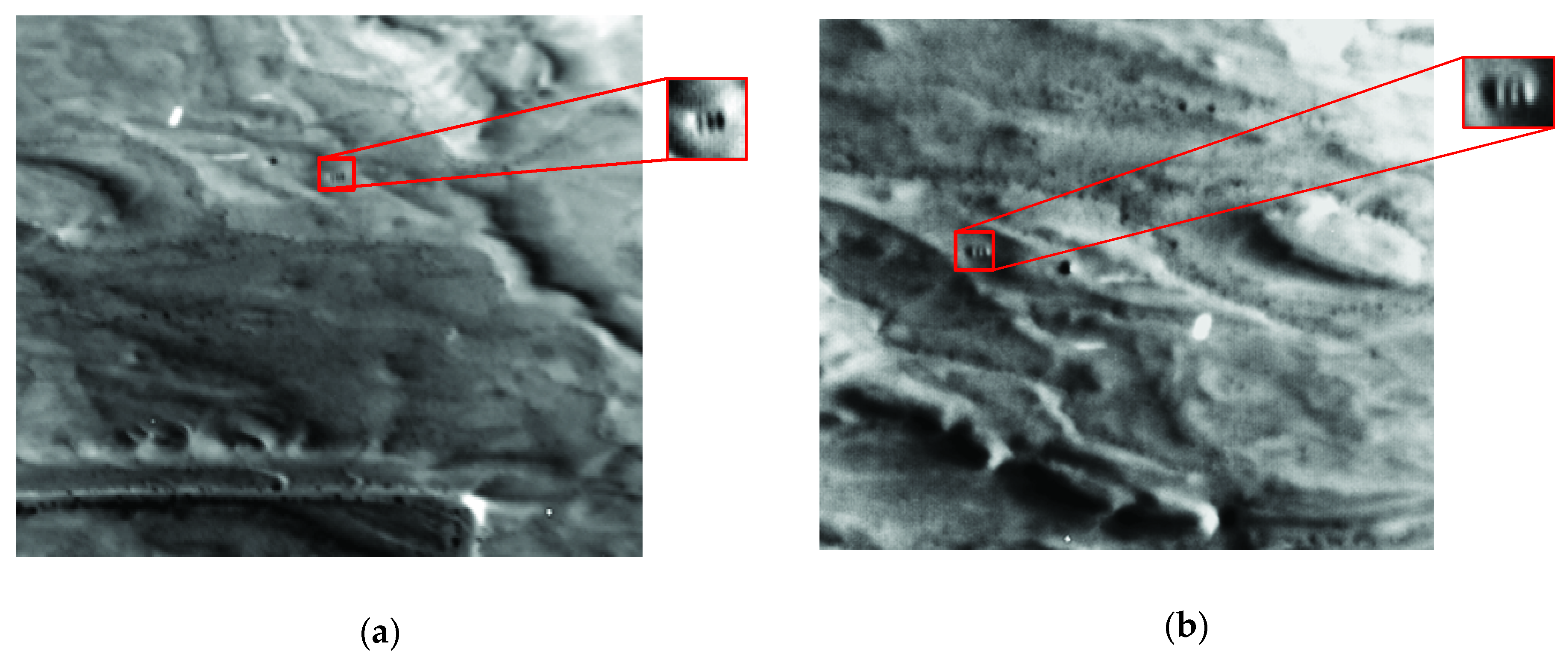
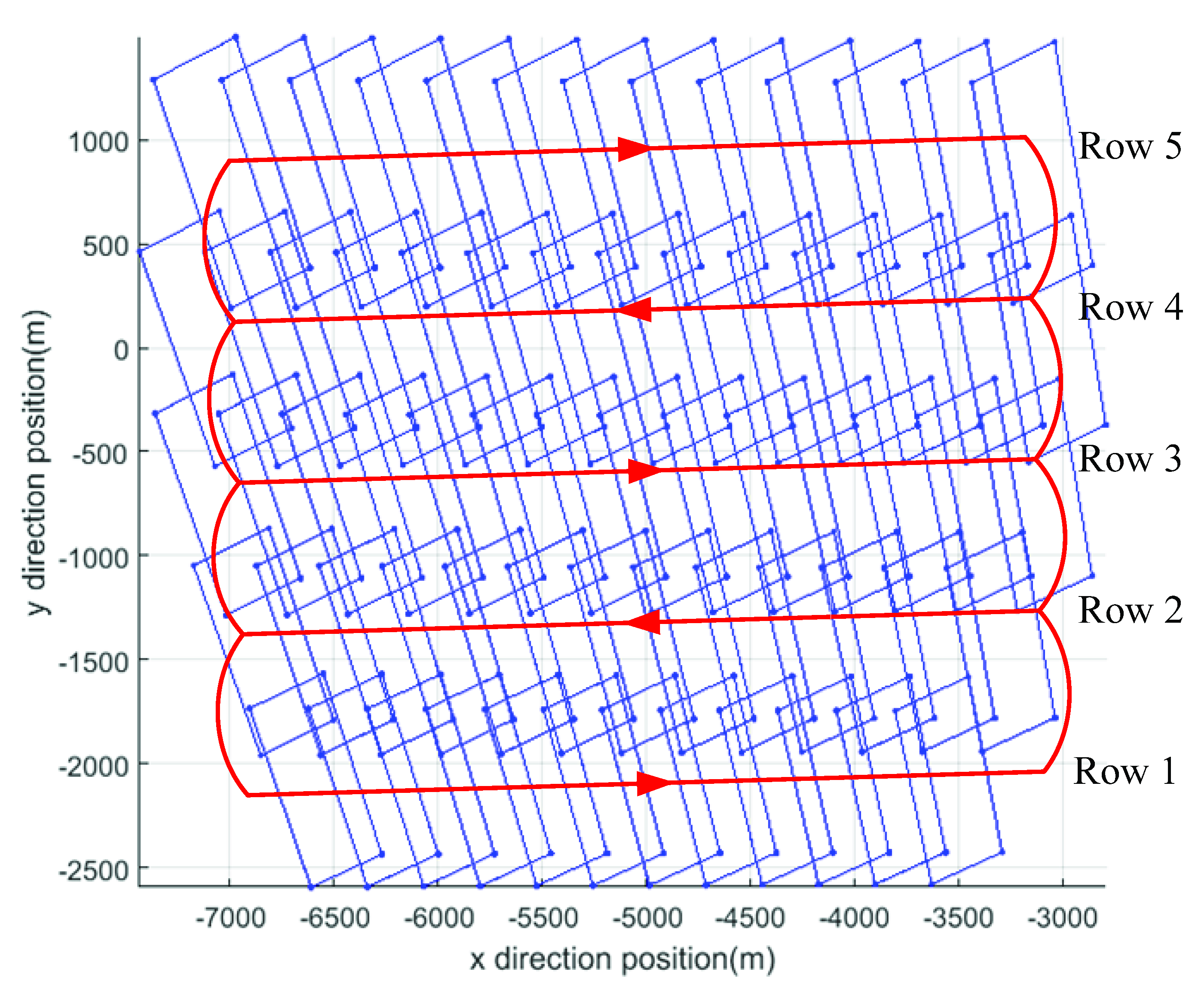
4. Experiments and Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hilkert, J.M. Inertially stabilized platform technology Concepts and principles. IEEE Control Syst. Mag. 2008, 28, 26–46. [Google Scholar]
- Hilkert, J.M. Kinematic algorithms for line-of-sight pointing and scanning using INS/GPS position and velocity information. Proc. SPIE 2005, 5810, 11–22. [Google Scholar]
- Miller, J.L.; Way, S.P.; Ellison, B.; Archer, C.L. Design challenges regarding high- definition electro-optic/infrared stabilized imaging systems. Opt. Eng. 2013, 52, 1841–1843. [Google Scholar] [CrossRef]
- Miller, R.; Mooty, G.; Hilkert, J.M. Gimbal system configurations and line-of-sight control techniques for small UAV applications. Proc. SPIE 2013, 8713, 871308. [Google Scholar]
- Hilkert, J.M. A unique three-axis gimbal mechanism. Proc. SPIE 2008, 6971, 69710E.1–69710E.8. [Google Scholar]
- Osborne, J.; Hicks, G.; Fuentes, R. Global analysis of the double-gimbal mechanism. IEEE Control Syst. Mag. 2008, 28, 44–64. [Google Scholar]
- Hilkert, J. A comparison of inertial line-of-sight stabilization techniques using mirrors. Proc. SPIE 2004, 5430, 13–22. [Google Scholar]
- Battistel, A.; Lizarralde, F.; Hsu, L. Inertially stabilized platforms using only two gyroscopic measures and sensitivity analysis to unmodeled motion. In Proceedings of the American Control Conference, Montreal, QC, Canada, 27–29 June 2012; pp. 4582–4587. [Google Scholar]
- Mokbel, H.F.; Ying, L.Q.; Roshdy, A.A.; Hua, C.G. Modeling and Optimization of Electro-Optical Dual Axis Inertially Stabilized Platform. In Proceedings of the 2012 International Conference on Optoelectronics and Microelectronics, Changchun, China, 23–25 August 2012; pp. 372–377. [Google Scholar]
- Haessig, D.A., Jr.; Towaco, N.J. Mirror Positioning Assembly for Stabilizing the Line-of-Sight in a Two-Axis Line-of-Sight Pointing System. U.S. Patent 5220456, 15 June 1993. [Google Scholar]
- Wang, Y. Research on High Precision LOS stabilization Technology Based on Fast Steering Mirror. Ph.D. Thesis, Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Science, Beijing, China, 2016. (In Chinese). [Google Scholar]
- Wang, L.; Liu, X.; Wang, C. Line-of-sight kinematics modeling and correction for precision pointing systems based on a two-axis fast steering mirror. Opt. Eng. 2019, 58, 084110. [Google Scholar] [CrossRef]
- Zhou, Q.; Ben-Tzvi, P.; Fan, D.; Goldenberg, A.A. Design of Fast Steering Mirror systems for precision laser beams steering. In Proceedings of the 2008 International Workshop on Robotic and Sensors Environments, Ottawa, ON, Canada, 17–18 October 2008; pp. 144–149. [Google Scholar]
- Hilkert, J.M.; Kanga, G.; Kinnear, K. Line-of-sight kinematics and corrections for fast-steering mirrors used in precision pointing and tracking systems. Proc. SPIE 2014, 9076, 90760F. [Google Scholar]
- National Geospatial-Intelligence Agency. Frame Sensor Model Metadata Profile Supporting Precise Geopositioning; SIG. 0002–2.1; National Geospatial-Intelligence Agency: Fort Belvoir, VA, USA, 2011. [Google Scholar]
- Held, K.J.; Brendan, H.R. Tier II Plus Airborne EO sensor LOS control and Image geolocation. In Proceedings of the IEEE 1997 IEEE Aerospace Conference, Aspen, CO, USA, 13 February 1997; pp. 377–405. [Google Scholar]
- Debruin, J.C. Derivation of line-of-sight stabilization equations for gimbaled-mirror optical systems. Proc. SPIE 1991, 1543, 236–247. [Google Scholar]
- Hilkert, J.M.; Cohen, S. Development of mirror stabilization line-of-sight rate equations for an unconventional sensor-to-gimbal orientation. Proc. SPIE 2009, 7338, 733803. [Google Scholar]
- Royalty, J.M. Line-of-Sight Kinematics for a Two-Axis Head Mirror: Equations for predicting and controlling mirrored LOS pointing. Proc. SPIE 2009, 7338, 733804. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work Mode | Advantage | Disadvantage | |
|---|---|---|---|
| two-axis gimbal | gimbal switches to complete LOS and motion compensation | simple structure and low cost | limited stability and performance, not suitable to high-resolution and high frequency |
| two-axis gimbal with two single-axis steering mirrors | gimbal works for LOS pointing, and steering mirrors work for motion compensation of respective axis | accurate stability and low payload | high cost and complexity. Compared to the two-axis mirror, they need more space. |
| two-axis gimbal with one two-axis steering mirror | gimbal works for LOS pointing, and steering mirror work for motion compensation of two-axis | accurate stability and low payload | Compared to two single-axis mirrors, it has nonlinear coupling, and the control algorithm is more complicated |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiu, J.; Huang, P.; Li, J.; Zhang, H.; Li, Y. Line of Sight and Image Motion Compensation for Step and Stare Imaging System. Appl. Sci. 2020, 10, 7119. https://doi.org/10.3390/app10207119
Xiu J, Huang P, Li J, Zhang H, Li Y. Line of Sight and Image Motion Compensation for Step and Stare Imaging System. Applied Sciences. 2020; 10(20):7119. https://doi.org/10.3390/app10207119
Chicago/Turabian StyleXiu, Jihong, Pu Huang, Jun Li, Hongwen Zhang, and Youyi Li. 2020. "Line of Sight and Image Motion Compensation for Step and Stare Imaging System" Applied Sciences 10, no. 20: 7119. https://doi.org/10.3390/app10207119
APA StyleXiu, J., Huang, P., Li, J., Zhang, H., & Li, Y. (2020). Line of Sight and Image Motion Compensation for Step and Stare Imaging System. Applied Sciences, 10(20), 7119. https://doi.org/10.3390/app10207119