Three-Dimensional Stopping Sight Distance Calculation Method under High Slope Restraint


Abstract
1. Introduction
2. Model Hypothesis
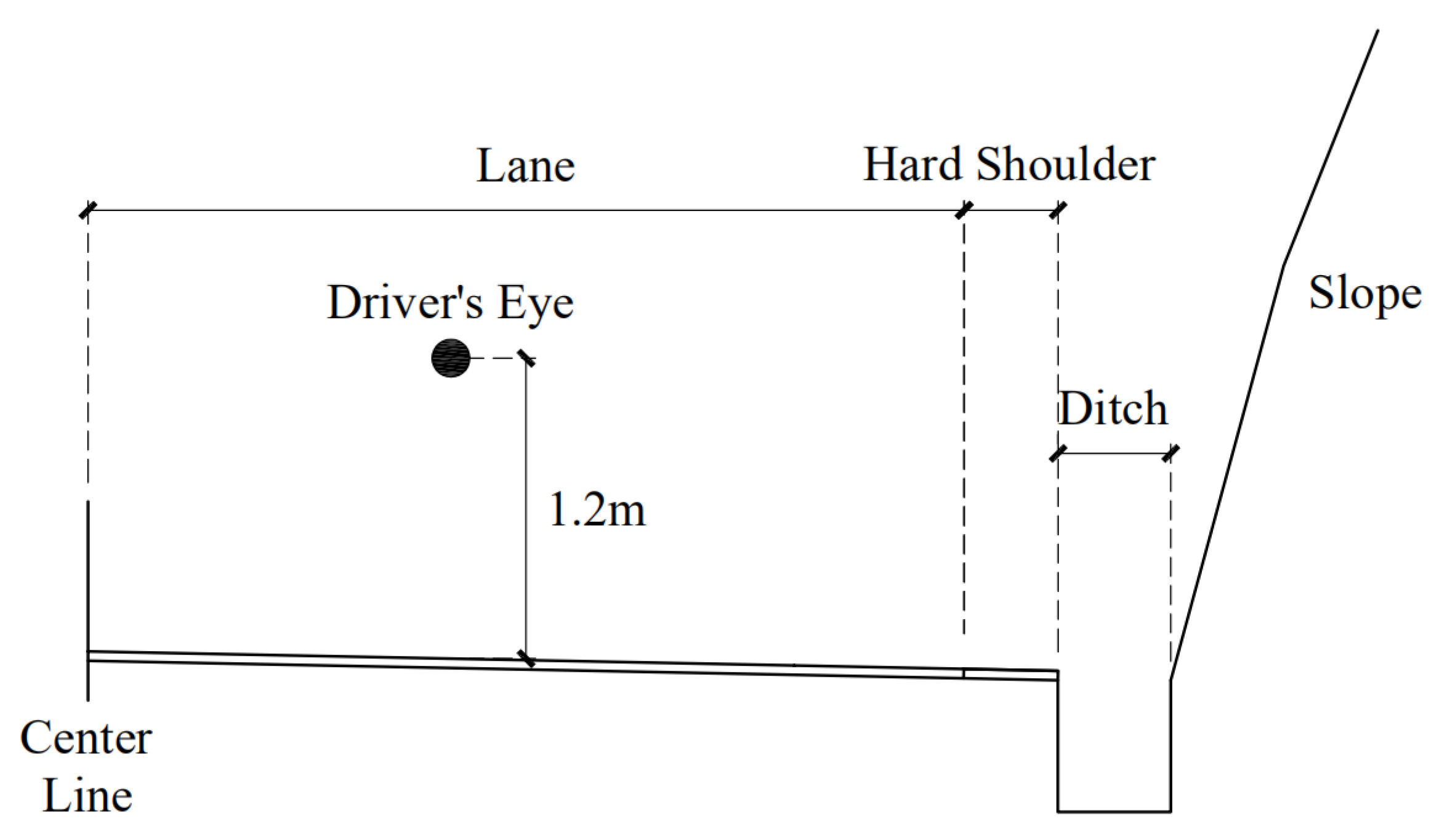
- (1)
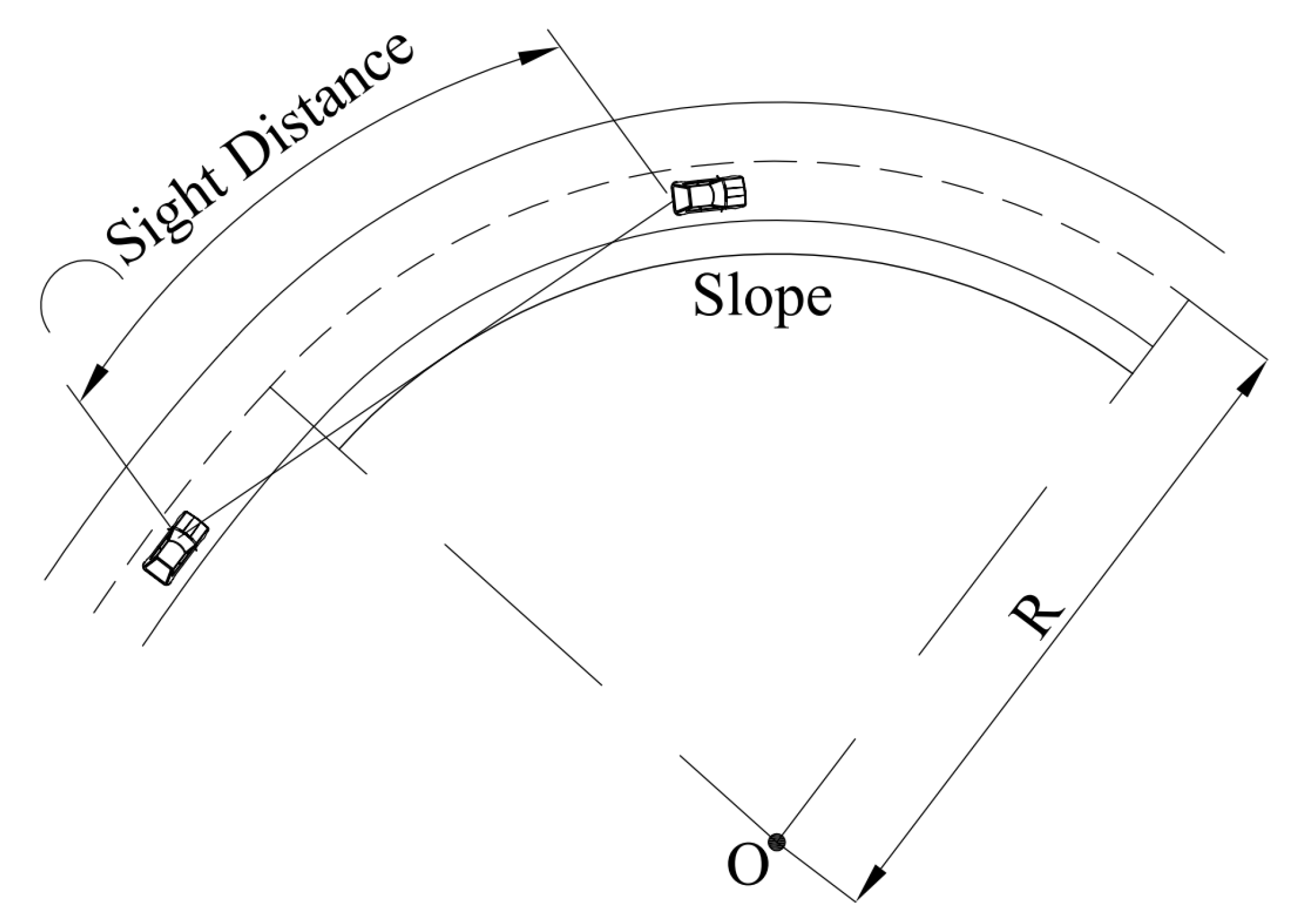
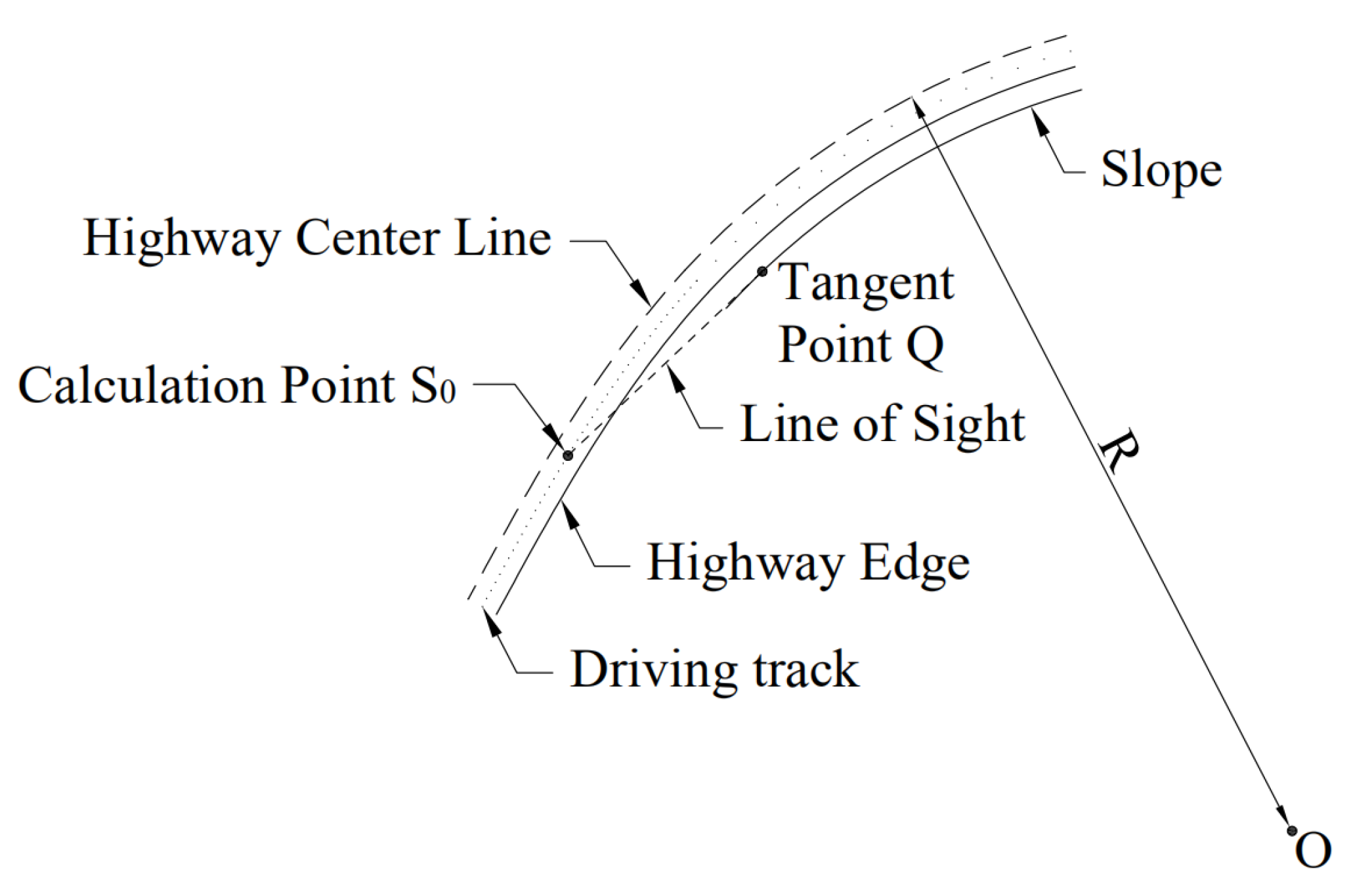
- Assume that the car is driving in the center of a lane.
- (2)
- Assume that the road slope is a curved surface that conforms to the curve of the road.
3. Calculation of Horizontal S.S.D.
4. Calculation of Three-Dimensional S.S.D.
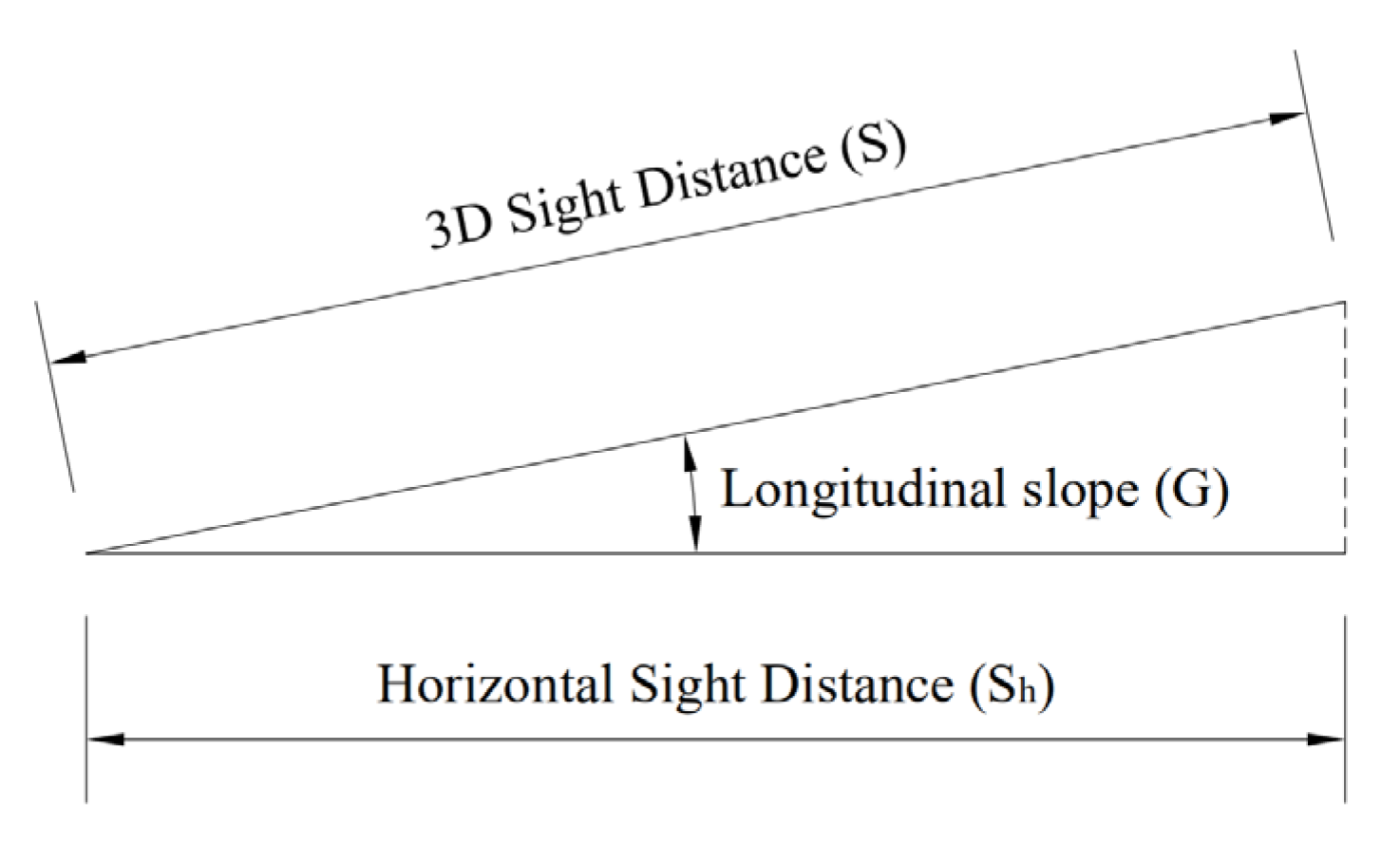
- (1)
- If the calculation section is a straight slope section (the longitudinal slope value is fixed), the extension effect of the longitudinal slope on the length is linear, as shown in Figure 5. Therefore, the three-dimensional S.S.D. value (Equation (12)) can be obtained by the flat-panel combination calculation.In the formula:G is the calculation of the longitudinal slope value of the road section.
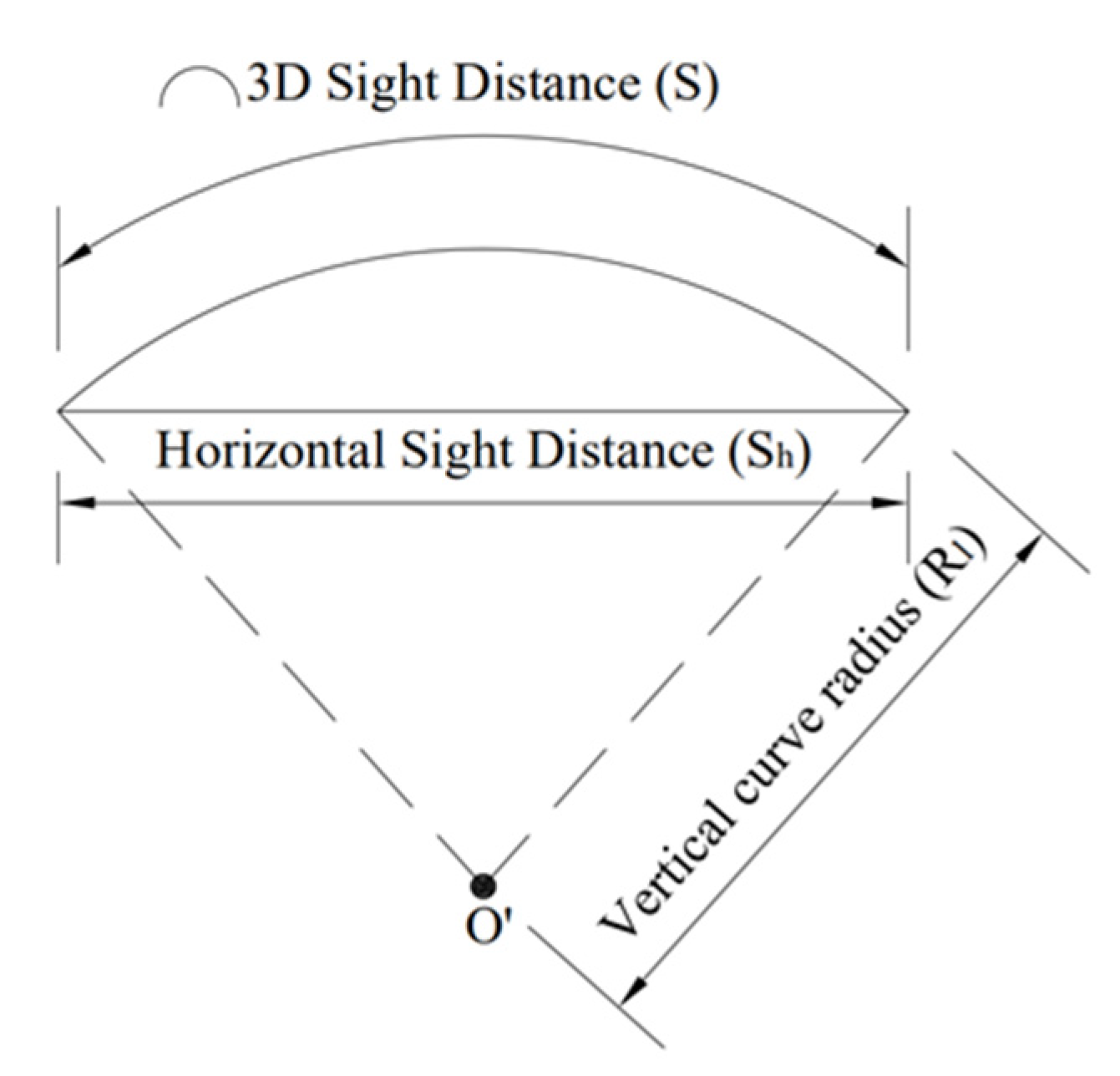
- (2)
- If the calculation section is in the vertical curve section, the relationship between the three-dimensional S.S.D. and the horizontal S.S.D. is the relationship between the chord and the arc, as shown in Figure 6. Therefore, through the relationship formula of chord length and arc length (Equation (13)), the three-dimensional S.S.D. value (Equation (14)) can be obtained.In the formula:C is the arc length;L is the chord length;r is the radius of the arc.In the formula:Rl is the vertical curve radius of the calculated road segment.
5. Instance Verification
5.1. S.S.D. Calculation for a Two-Lane Rural Highway in Guizhou Province
5.2. S.S.D. Inspection Based on Design Speed
5.3. S.S.D. Inspection Based on Operating Speed
6. Conclusions and Future Work
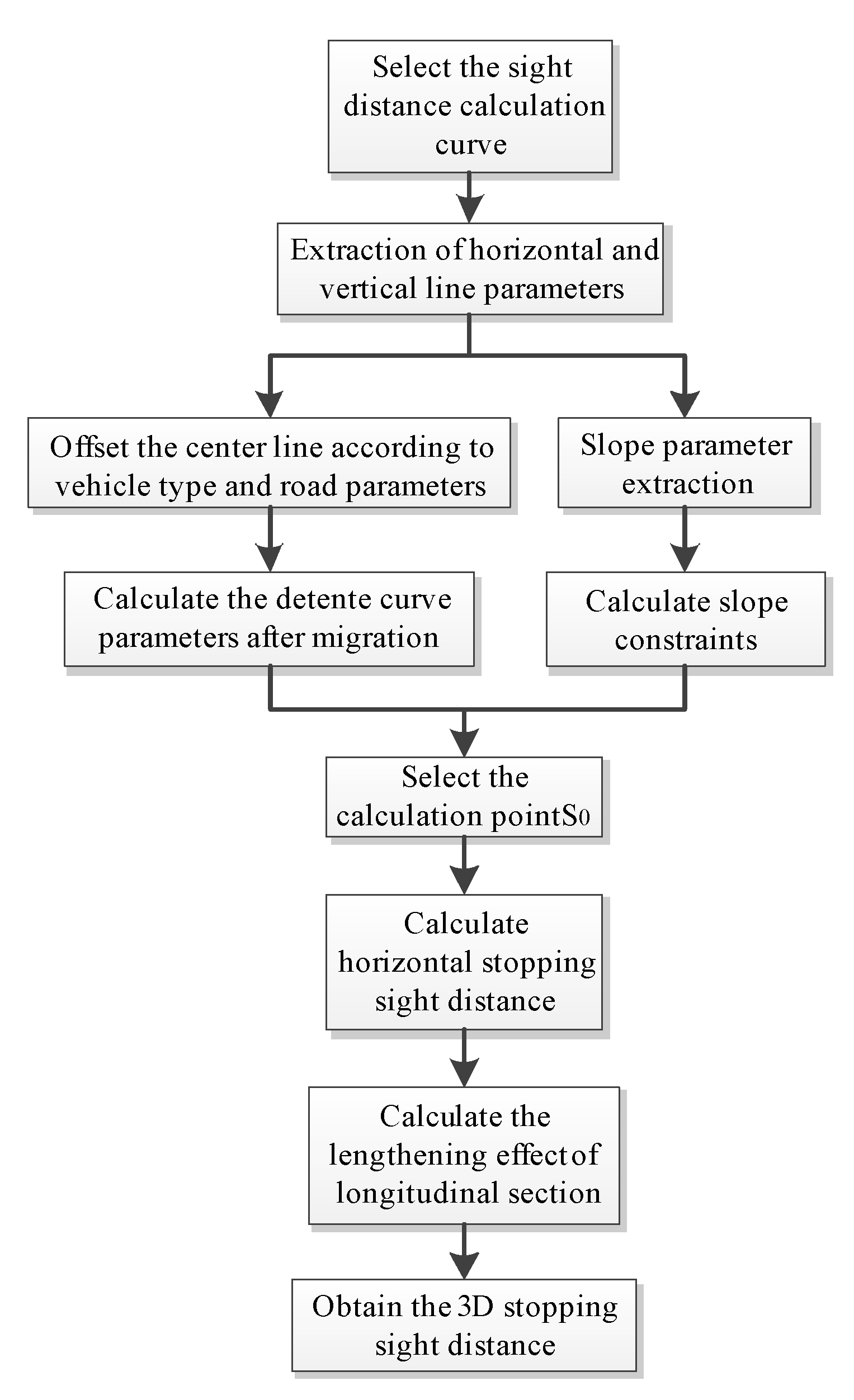
- This article fully considers the actual driving position of the car, the driver’s apparent height, side ditches, and slopes and other actual road driving conditions and establishes a relatively realistic calculation model. Based on the calculation method proposed by highway design parameters, the precise S.S.D. value on the plane is first calculated, and then the height difference between the driver’s viewpoint and the end of the sight line is calculated, and finally the 3D stopping sight distance value is obtained through the principle of horizontal and vertical combination.
- In this paper, the S.S.D. check of actual secondary roads based on the design speed and operating speed is carried out. The results show that the sight distance evaluation result obtained by the calculation method proposed in this paper is consistent with the result of the H.S.O. method.
- The radius of the horizontal curve is the main factor that affects the sight distance of the turning section, while the radius of the vertical curve has a small influence and can be ignored in the actual calculation. That is to say, the plane sight distance can be used to replace the 3D stopping sight distance in vertical curve section.
- Since the calculation method in this paper is sight distance calculation of points, the following research extends point calculation to sight distance calculation of the entire curve through software programming.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kanellaidis, G.; Vardaki, S. Highway Geometric Design from the Perspective of Recent Safety Developments. J. Transp. Eng. 2011, 137, 841–844. [Google Scholar] [CrossRef]
- Jha, M.K.; Karri, G.A.K.; Kuhn, W. New Three-Dimensional Highway Design Methodology for Sight Distance Measurement. Transp. Res. Rec. J. Transp. Res. Board 2011, 2262, 74–82. [Google Scholar] [CrossRef]
- Castro, M.; Iglesias, L.; Sánchez, J.A.; Ambrosio, L. Sight distance analysis of highways using GIS tools. Transp. Res. Part C Emerg. Technol. 2011, 19, 997–1005. [Google Scholar] [CrossRef]
- Castro, M.; Anta, J.A.; Iglesias, L.; Sánchez, J.A. GIS-Based System for Sight Distance Analysis of Highways. J. Comput. Civ. Eng. 2014, 28. [Google Scholar] [CrossRef]
- Ismail, K.; Sayed, T. New Algorithm for Calculating 3D Available Sight Distance. J. Transp. Eng. 2007, 133, 572–581. [Google Scholar] [CrossRef]
- Hassan, Y.; Sayed, T. Effect of driver and road characteristics on required preview sight distance. Can. J. Civ. Eng. 2002, 29, 276–288. [Google Scholar] [CrossRef]
- Sarhan, M.; Hassan, Y. Three-Dimensional, Probabilistic Highway Design. Transp. Res. Rec. J. Transp. Res. Board 2008, 2060, 10–18. [Google Scholar] [CrossRef]
- Ibrahim, S.E.; Sayed, T.; Ismail, K. Methodology for safety optimization of highway cross-sections for horizontal curves with restricted sight distance. Accid. Anal. Prev. 2012, 49, 476–485. [Google Scholar] [CrossRef] [PubMed]
- Wood, J.S.; Donnell, E.T. Stopping Sight Distance and Horizontal Sight Line Offsets at Horizontal Curves. Transp. Res. Rec. J. Transp. Res. Board 2014, 2436, 43–50. [Google Scholar] [CrossRef]
- Llorca, C.; Moreno, A.T.; Sayed, T.; García, A. Sight Distance Standards Based on Observational Data Risk Evaluation of Passing. Transp. Res. Rec. J. Transp. Res. Board 2014, 2404, 18–26. [Google Scholar] [CrossRef]
- Mavromatis, S.; Mertzanis, F.; Kleioutis, G.; Psarianos, B. Three-dimensional stopping sight distance control on passing lanes of divided highways. Eur. Transp. Res. Rev. 2016, 8. [Google Scholar] [CrossRef][Green Version]
- Wen, H.; Liu, D.; Huang, J. Study on Safe Speed on Nighttime Mountain Highways Based on a Modified Stopping Sight Distance Model. In CICTP 2015; American Society of Civil Engineers: Reston, VA, USA, 2015. [Google Scholar] [CrossRef]
- Gargoum, S.A.; El-Basyouny, K.; Sabbagh, J. Assessing Stopping and Passing Sight Distance on Highways Using Mobile LiDAR Data. J. Comput. Civ. Eng. 2018, 32. [Google Scholar] [CrossRef]
- Moreno, A.T.; Garcia, A.; Llorca, C.; Camacho-Torregrosa, F.J. Influence of highway three-dimensional coordination on drivers’ perception of horizontal curvature and available sight distance. IET Intell. Transp. Syst. 2013, 7, 244–250. [Google Scholar] [CrossRef]
- Moreno, A.T.; Ferrer, V.; Garcia, A. Evaluation of 3d coordination to maximize available stopping sight distance in two-lane rural highways. Balt. J. Road Bridge Eng. 2014, 9, 94–100. [Google Scholar] [CrossRef]
- De Santos-Berbel, C.; Castro, M. Three-Dimensional Virtual Highway Model for Sight-Distance Evaluation of Highway Underpasses. J. Surv. Eng. 2018, 144. [Google Scholar] [CrossRef]
- Osama, A.; Sayed, T.; Easa, S. Framework for evaluating risk of limited sight distance for permitted left-turn movements: Case study. Can. J. Civ. Eng. 2016, 43, 369–377. [Google Scholar] [CrossRef]
- Mampearachchi, W.K.; Masakorala, S.R. Analytical Model for Passing Sight Distance Design Criteria of Two-Lane Roads in Sri Lanka. Transp. Telecommun. 2018, 19, 10–20. [Google Scholar] [CrossRef]
- Chen, Y.-R.; Fu, Y.-T.; Wang, F. Establishment and Application of Sight Distance Computing Model Based on Support Vector Regression. China J. Highw. Transp. 2018, 31, 105–113. (In English) [Google Scholar]
- Zhao, Y.P.; Yang, S.W.; Zhao, Y.F. Analysis of Passing Lane Stopping Sight Distance Outside Median Divider in Expressway. Highway 2004, 10, 39–42. [Google Scholar]
- Wang, X.-N.; Wang, Y.-Z.; Miao, M.-N.; Ou, L. Study and Application of Dynamic Stopping Sight Distance Model. Highway 2015, 60, 151–155. [Google Scholar]
- Design Specification for Highway Alignment, JDG D20-2017. Available online: https://www.chinesestandard.net/PDF/English.aspx/JTGD20-2017 (accessed on 1 May 2020).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Intersection | Pile No. at the Center of the Curve | Radius of Circular Curve (m) | Length of Transition Curve (m) | Slope | Vertical Radius (m) |
|---|---|---|---|---|---|
| PI115 | K173 + 859 | 60.8 | 50 | 1:0.3 | 2800 |
| PI144 | K178 + 841 | 85.2 | 35 | 1:0.3 | 2800 |
| PI152 | K179 + 933 | 77.5 | 40 | 1:0.3 | 2800 |
| PI317 | K217 + 119 | 97.4 | 40 | 1:0.3 | - |
| PI324 | K219 + 289 | 90.0 | 45 | 1:0.4 | 1800 |
| PI369 | K229 + 543 | 102.9 | 65 | 1:0.3 | - |
| Intersection | PI115 | PI144 | PI152 | PI317 | PI324 | PI369 |
|---|---|---|---|---|---|---|
| Horizontal S.S.D. (m) | 46.2241 | 56.4194 | 53.0288 | 57.3197 | 57.5940 | 58.3036 |
| 3D S.S.D. (m) | 46.2246 | 56.4204 | 53.0296 | 57.3483 | 57.5965 | 58.4897 |
| Difference (m) | 0.0005 | 0.0010 | 0.0008 | 0.0286 | 0.0025 | 0.1861 |
| Parameters of Our Radar Speedometer | Parameter Values |
|---|---|
| Speed range | 16–320 km/h 10–200 m/h |
| Detection range | 0–390 m |
| Speed measuring precision | ±1.0 mph to ±2.0 kph |
| Microwave frequency | 24.15 Ghz |
| Measuring Station | K173 + 000 | K180 + 000 | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Lane | 1 | 2 | 1 | 2 | ||||||||||||||||
| Car type | S | M | S | M | M | L | S | M | ||||||||||||
| Speed | 37 | 45 | 48 | 42 | 41 | 40 | 31 | 31 | 28 | 30 | 28 | 48 | 31 | 35 | 34 | 30 | 45 | 46 | 37 | 33 |
| Average velocity | 43 | 37 | 30 | 30 | 38 | 31 | 36 | 39 | ||||||||||||
| Operating speed V85 | 47 | 41 | 30 | 30 | 37 | 31 | 39 | 42 | ||||||||||||
| Measuring Station | K215 + 000 | K230 + 500 | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Lane | 1 | 2 | 1 | 2 | |||||||||||||||
| Car type | S | S | M | L | S | S | M | L | |||||||||||
| Speed | 47 | 32 | 28 | 29 | 41 | 36 | 37 | 35 | 35 | 30 | 31 | 44 | 35 | 33 | 31 | 34 | 30 | 35 | 28 |
| Average velocity | 34 | 37 | 35 | 34 | 33 | 30 | 35 | 28 | |||||||||||
| Operating speed V85 | 35 | 38 | 36 | 35 | 34 | 30 | 35 | 28 | |||||||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Wang, J.; Xia, Y.; Huang, L. Three-Dimensional Stopping Sight Distance Calculation Method under High Slope Restraint. Appl. Sci. 2020, 10, 7118. https://doi.org/10.3390/app10207118
Yang Y, Wang J, Xia Y, Huang L. Three-Dimensional Stopping Sight Distance Calculation Method under High Slope Restraint. Applied Sciences. 2020; 10(20):7118. https://doi.org/10.3390/app10207118
Chicago/Turabian StyleYang, Yonghong, Jiecong Wang, Yuanbo Xia, and Lan Huang. 2020. "Three-Dimensional Stopping Sight Distance Calculation Method under High Slope Restraint" Applied Sciences 10, no. 20: 7118. https://doi.org/10.3390/app10207118
APA StyleYang, Y., Wang, J., Xia, Y., & Huang, L. (2020). Three-Dimensional Stopping Sight Distance Calculation Method under High Slope Restraint. Applied Sciences, 10(20), 7118. https://doi.org/10.3390/app10207118