A Synchronous Spin-Exchange Optically Pumped NMR-Gyroscope


Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
1.1. Bloch Equation
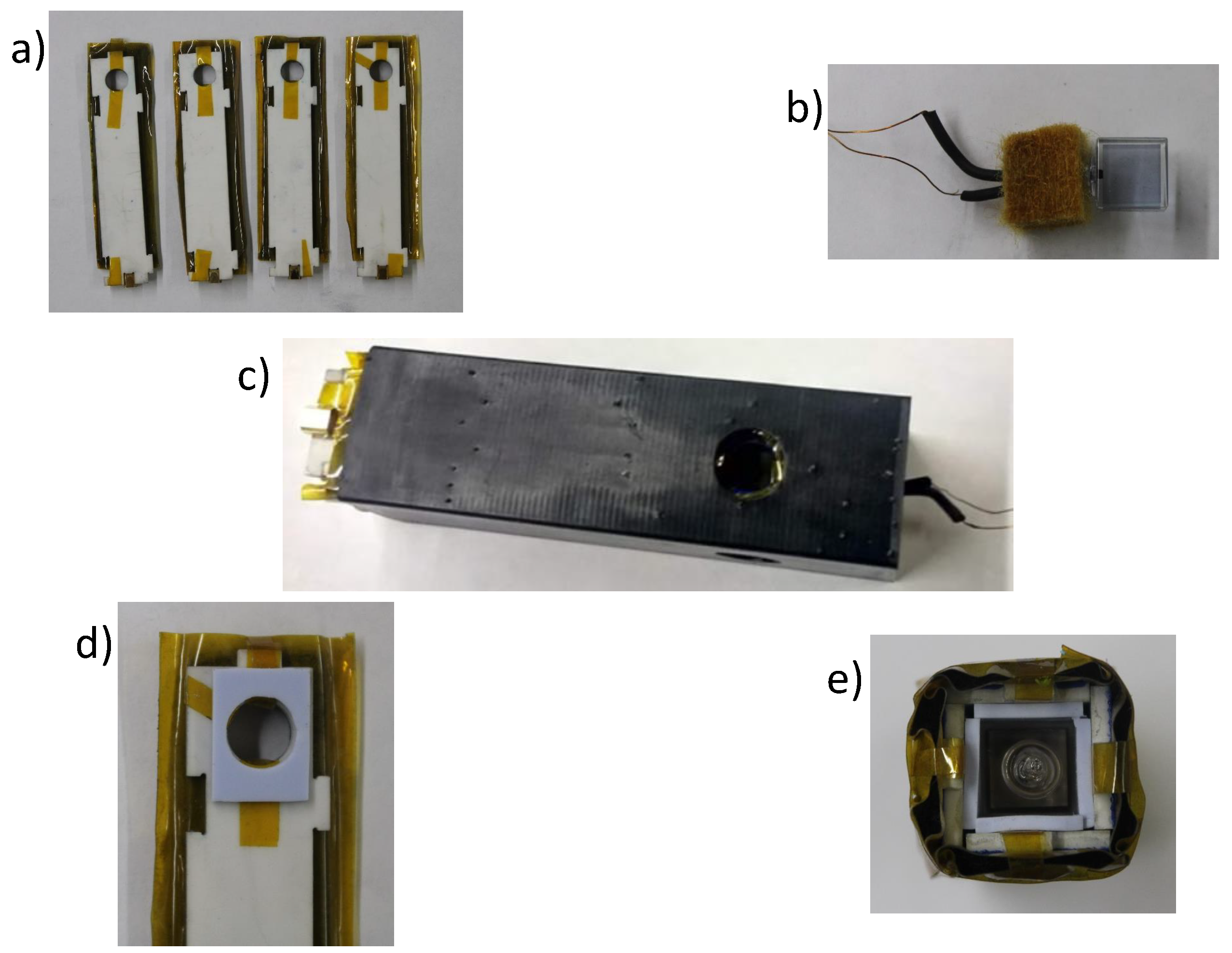
2. Materials and Methods
3. Results
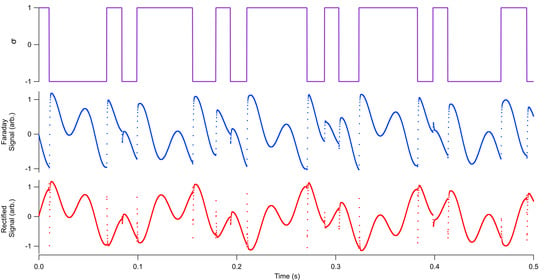
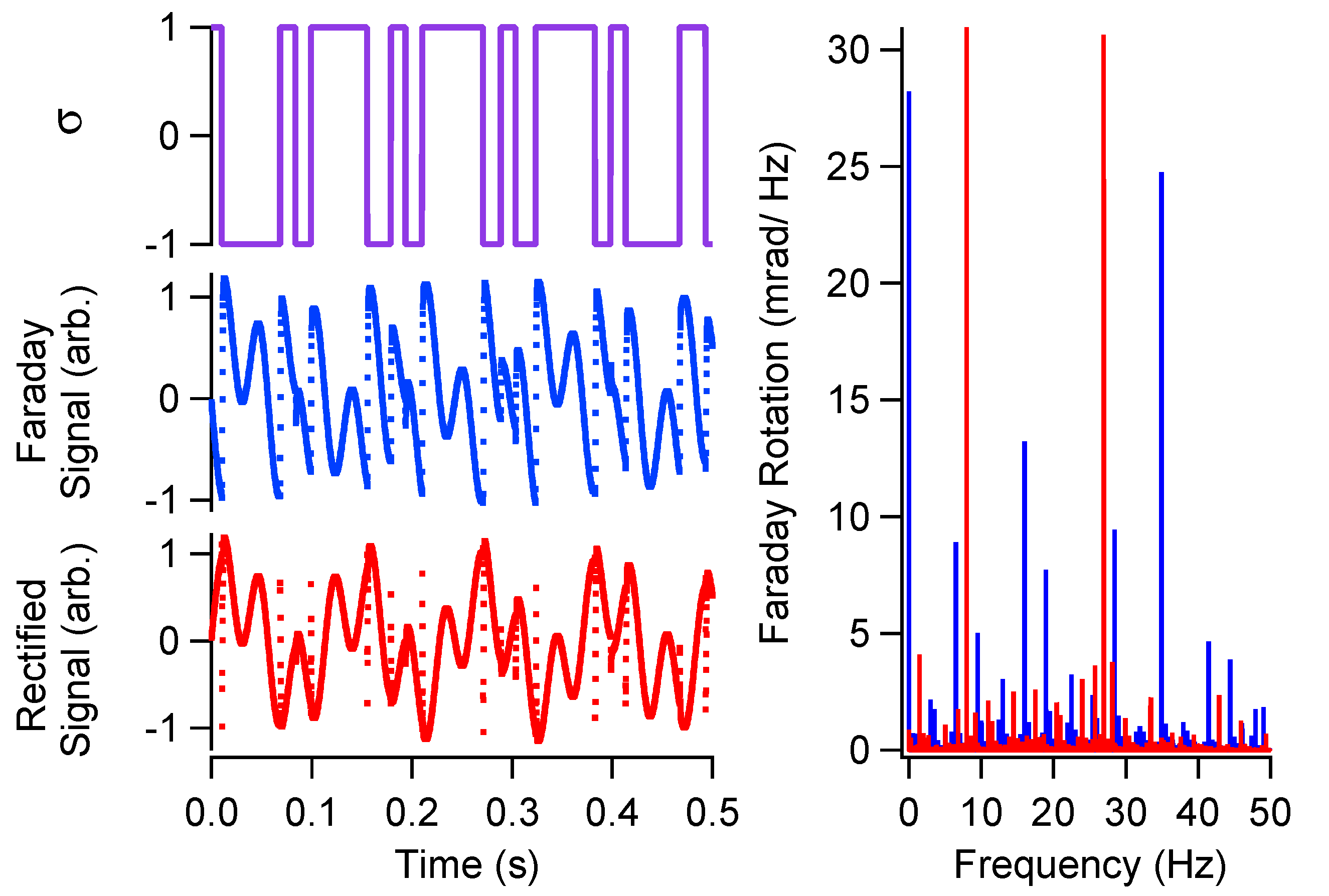
3.1. NMR Excitation and Detection
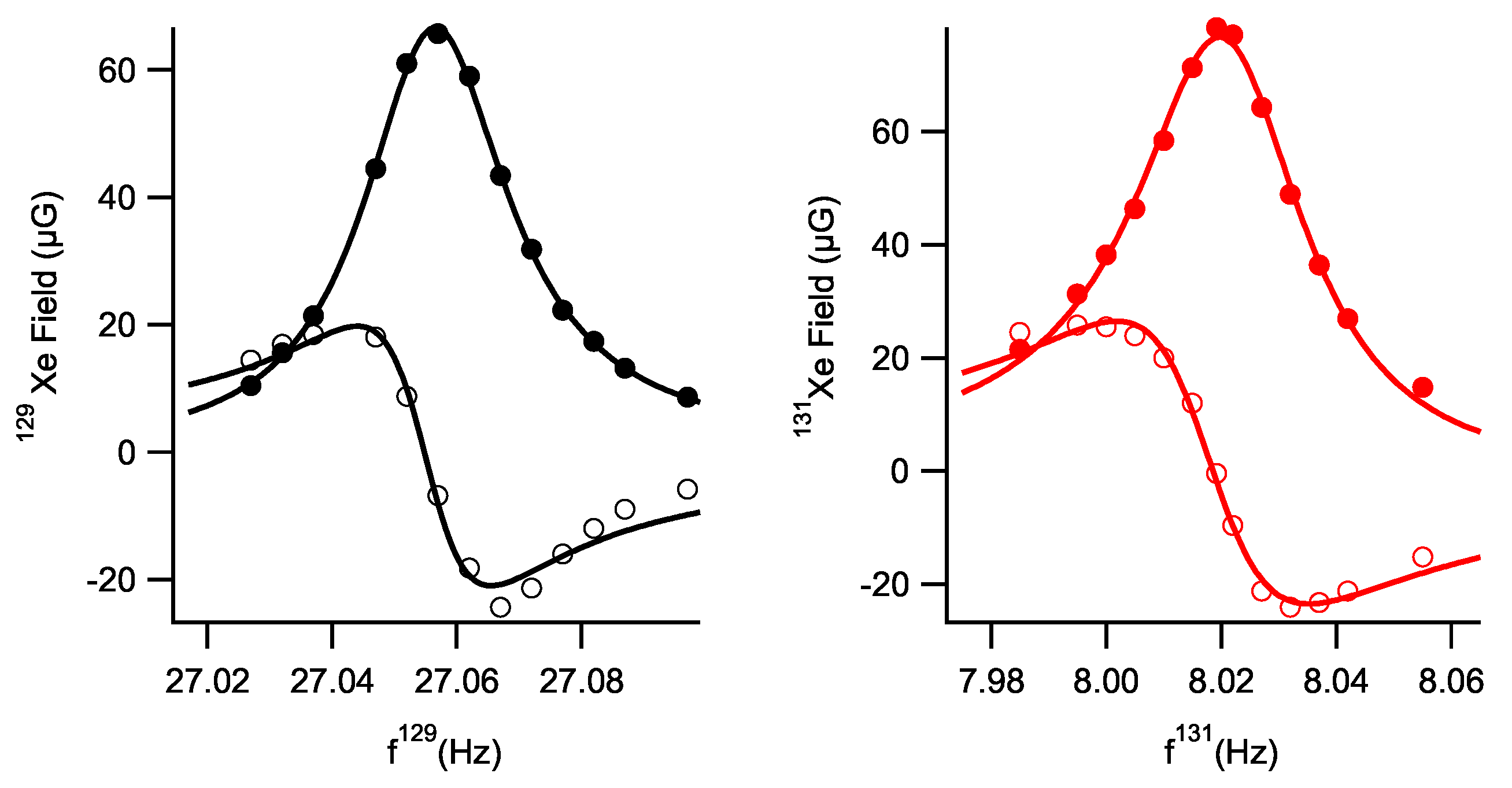
3.2. Comagnetometry
3.3. Cross Talk
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ARW | angle random walk |
| EOM | electro-optic modulator |
| GPS | global positioning system |
| NMR | nuclear magnetic resonance |
| PBS | polarizing beam splitter |
| PM | polarization modulation |
| SNR | signal-to-noise ratio |
References
- Thrasher, D.A.; Sorensen, S.S.; Weber, J.; Bulatowicz, M.; Korver, A.; Larsen, M.; Walker, T.G. Continuous comagnetometry using transversely polarized Xe isotopes. Phys. Rev. A 2019, 100, 061403(R). [Google Scholar] [CrossRef]
- Thrasher, D.A.; Sorensen, S.S.; Walker, T.G. Dual-Species Synchronous Spin-Exchange Optical Pumping. arXiv 2019, arXiv:1912.04991. [Google Scholar]
- Walker, T.; Larsen, M. Spin-Exchange-Pumped NMR Gyros. Adv. At. Mol. Opt. Phys. 2016, 65, 373–401. [Google Scholar] [CrossRef]
- Kornack, T.W.; Ghosh, R.K.; Romalis, M.V. Nuclear spin gyroscope based on an atomic comagnetometer. Phys. Rev. Lett. 2005, 95, 230801. [Google Scholar] [CrossRef] [PubMed]
- Jiang, L.; Quan, W.; Li, R.; Fan, W.; Liu, F.; Qin, J.; Wan, S.; Fang, J. A parametrically modulated dual-axis atomic spin gyroscope. Appl. Phys. Lett. 2018, 112, 054103. [Google Scholar] [CrossRef]
- Karwacki, F.A. Nuclear magnetic resonance gyro development. Navigation 1980, 27, 72. [Google Scholar] [CrossRef]
- Donley, E.A.; Kitching, J. Nuclear magnetic resonance gyroscopes. In Optical Magnetometry; Cambridge University Press: Cambridge, UK, 2013; Chapter 19; pp. 369–386. [Google Scholar]
- Brinkmann, D.; Brun, E.; Staub, H.H. Kernresonanz im gasformigen Xenon. Helv. Phys. Acta 1962, 35, 431. [Google Scholar]
- Chaudhury, D.R. Explained: What’s Mission Shakti and how was it executed? The Economic Times, 28 March 2019. [Google Scholar]
- Cheiney, P.; Fouché, L.; Templier, S.; Napolitano, F.; Battelier, B.; Bouyer, P.; Barrett, B. Navigation-Compatible Hybrid Quantum Accelerometer Using a Kalman Filter. Phys. Rev. Appl. 2018, 10, 034030. [Google Scholar] [CrossRef]
- Bulatowicz, M.; Griffith, R.; Larsen, M.; Mirijanian, J.; Fu, C.B.; Smith, E.; Snow, W.M.; Yan, H.; Walker, T.G. Laboratory Search for a Long-Range T-Odd, P-Odd Interaction from Axionlike Particles Using Dual-Species Nuclear Magnetic Resonance with Polarized 129Xe and 131Xe Gas. Phys. Rev. Lett. 2013, 111, 102001. [Google Scholar] [CrossRef] [PubMed]
- Korver, A.; Thrasher, D.; Bulatowicz, M.; Walker, T.G. Synchronous Spin-Exchange Optical Pumping. Phys. Rev. Lett. 2015, 115, 253001. [Google Scholar] [CrossRef] [PubMed]
- Thrasher, D.A. Continuous Comagnetometry Using Transversely Polarized Xe Isotopes. Ph.D. Thesis, University of Wisconsin-Madison, Madison, WI, USA, 2020. [Google Scholar]
- Limes, M.E.; Sheng, D.; Romalis, M.V. 3He-129Xe Comagnetometery using 87Rb Detection and Decoupling. Phys. Rev. Lett. 2018, 120, 033401. [Google Scholar] [CrossRef] [PubMed]
- Kwon, T.M.; Mark, J.G.; Volk, C.H. Quadrupole nuclear spin relaxation of 131Xe in the presence of rubidium vapor. Phys. Rev. A 1981, 24, 1894–1903. [Google Scholar] [CrossRef]
- Korver, A. Towards an NMR Oscillator. Ph.D. Thesis, University of Wisconsin-Madison, Madison, WI, USA, 2015. [Google Scholar]
- Wyllie, R. The Developement of a Multichannel Atomic Magnetometer Array for Fetal Magnetocardiography. Ph.D. Thesis, University of Wisconsin-Madison, Madison, WI, USA, 2012. [Google Scholar]
- Allan, D.; Barnes, J. A Modified “Allan Variance” with Increased Oscillator Characterization Ability. In Proceedings of the 35th Anual Frequency Control Symposium, Philadelphia, PA, USA, 27–29 May 1981; pp. 470–475. [Google Scholar]








© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sorensen, S.S.; Thrasher, D.A.; Walker, T.G. A Synchronous Spin-Exchange Optically Pumped NMR-Gyroscope. Appl. Sci. 2020, 10, 7099. https://doi.org/10.3390/app10207099
Sorensen SS, Thrasher DA, Walker TG. A Synchronous Spin-Exchange Optically Pumped NMR-Gyroscope. Applied Sciences. 2020; 10(20):7099. https://doi.org/10.3390/app10207099
Chicago/Turabian StyleSorensen, Susan S., Daniel A. Thrasher, and Thad G. Walker. 2020. "A Synchronous Spin-Exchange Optically Pumped NMR-Gyroscope" Applied Sciences 10, no. 20: 7099. https://doi.org/10.3390/app10207099
APA StyleSorensen, S. S., Thrasher, D. A., & Walker, T. G. (2020). A Synchronous Spin-Exchange Optically Pumped NMR-Gyroscope. Applied Sciences, 10(20), 7099. https://doi.org/10.3390/app10207099