Time–Frequency Attribute Analysis of Channel 1 Data of Lunar Penetrating Radar

Abstract
1. Introduction
2. Materials and Methods
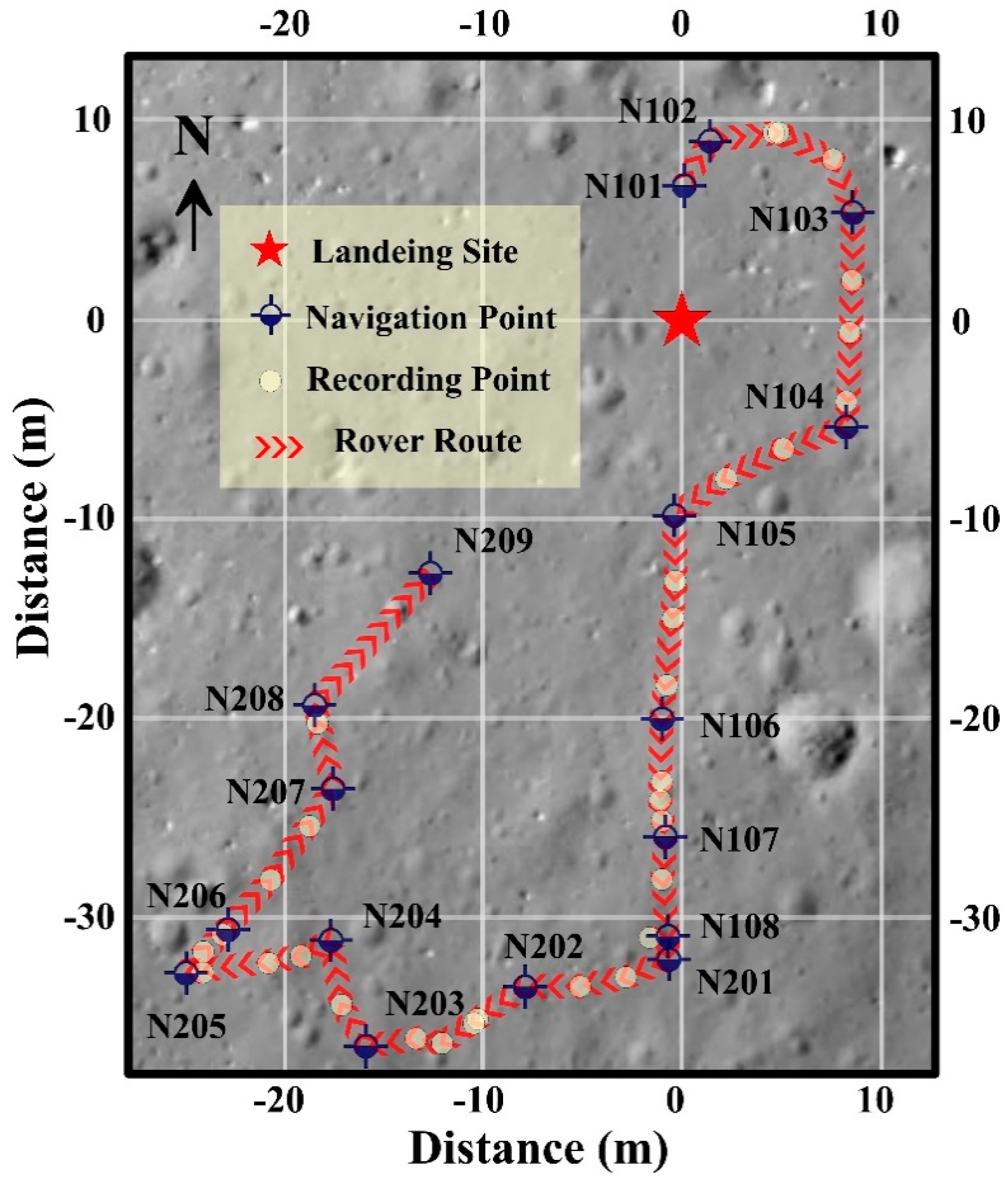
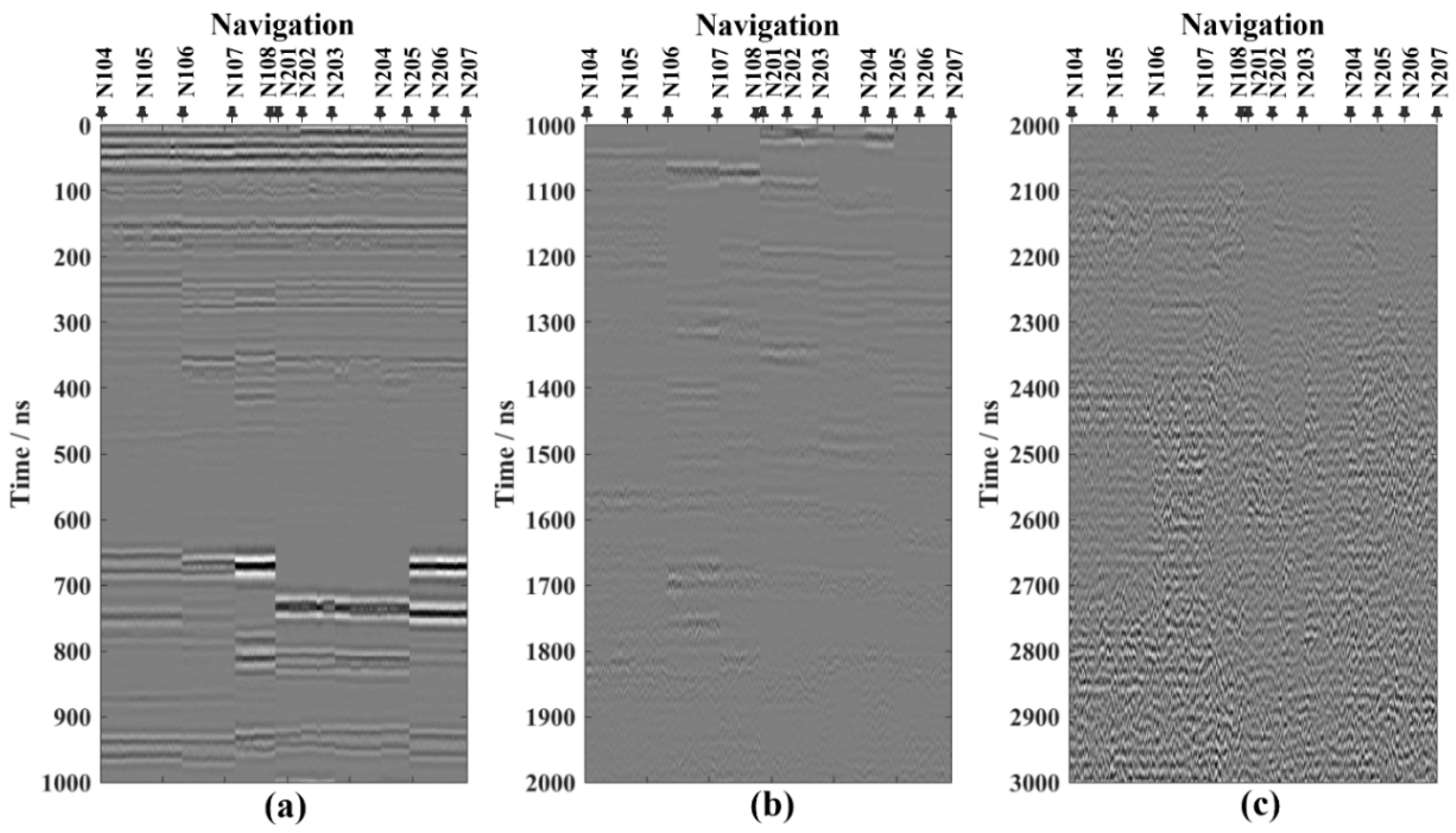
2.1. Data Explanation and Preprocessing
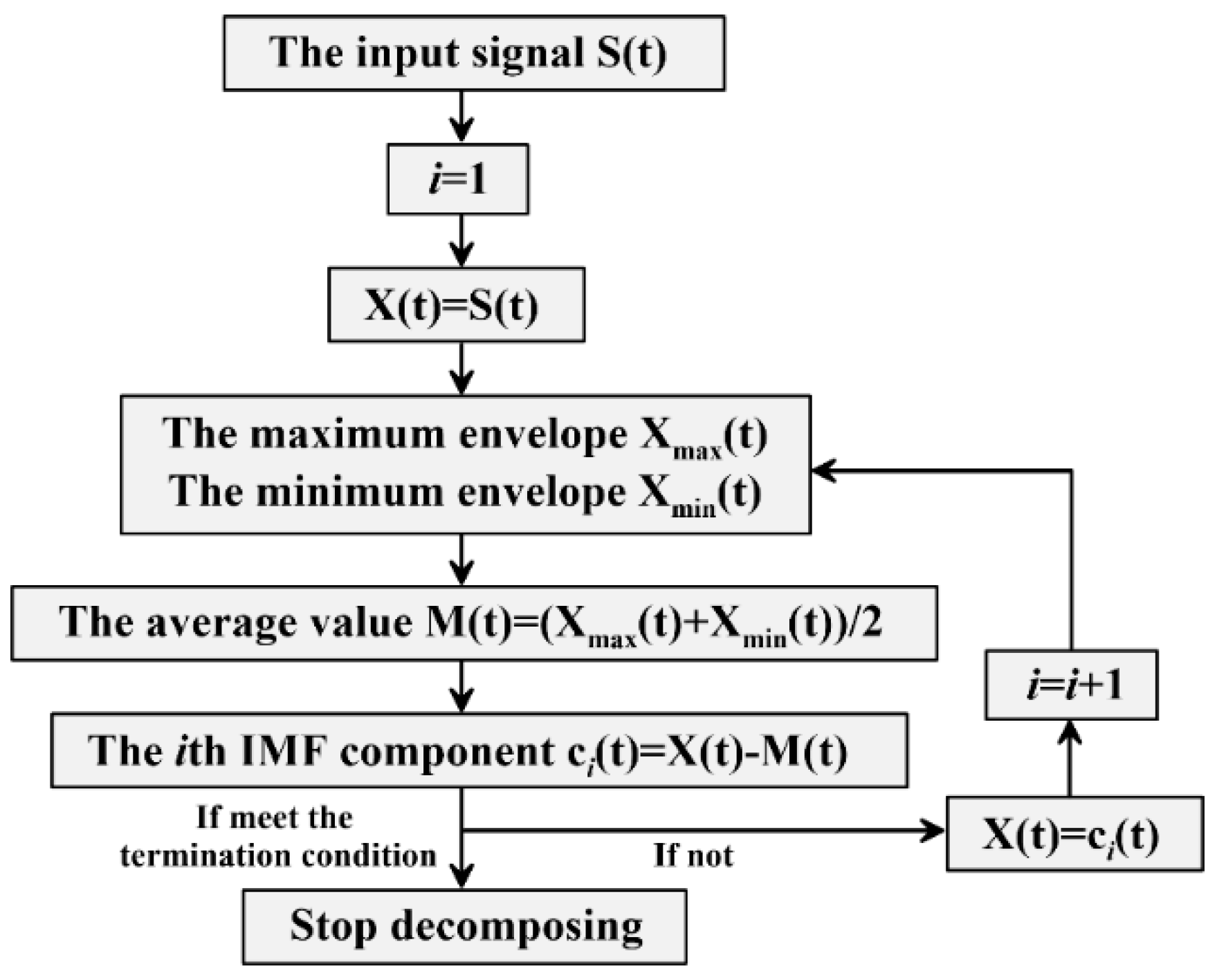
2.2. CEEMD
- Generatewhere (i = 1, …, I) are different implementations of white Gaussian noise,
- Each (i = 1, …, I) is fully resolved by EMD to get their modes , where k = 1, K represents the modes,
- Disintegrate by EMD I realizations to obtain their first modes and calculate
- In the first phase (k = 1), obtain the first residue as in Equation (4).
- Decompose realizations , i = 1, …, I, until their first EMD mode and define the (k + 1)-th mode as [23]
- Go to step 4 to continue to get the next k.
2.3. Hilbert Transform
3. Results
3.1. Analysis in Frequency Domain and the Time–Frequency Domain
- (1)
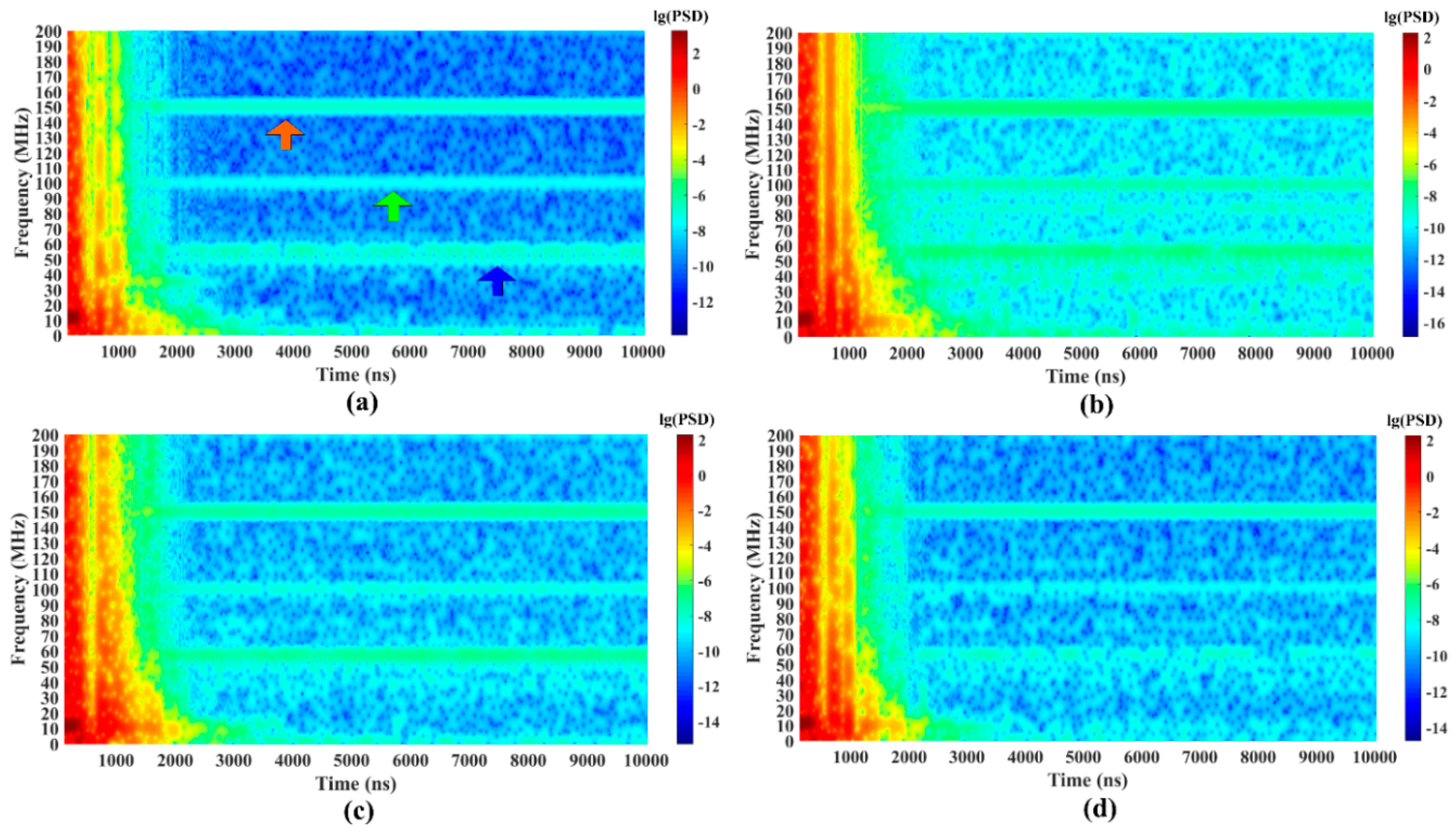
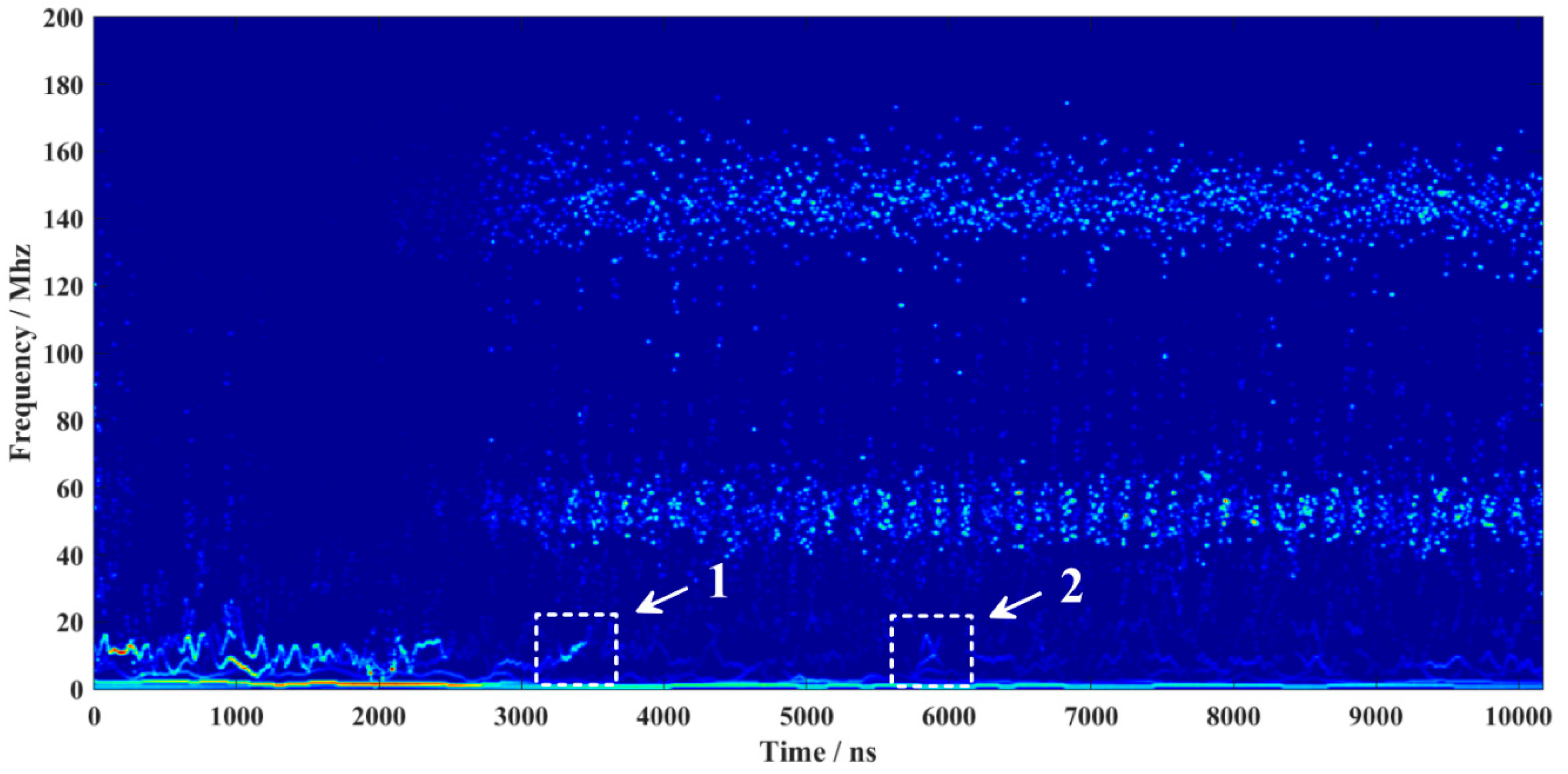
- As the arrows in the N104 time–frequency spectrum of STFT show, there are 150, 100, and 60 MHz electromagnetic energies in the data throughout the entire time delay. Obviously, the energies at 150 and 100 MHz are not the transmitting signals. The electromagnetic energies at those frequencies may have come from the lunar space or the instrument (needs further research).
- (2)
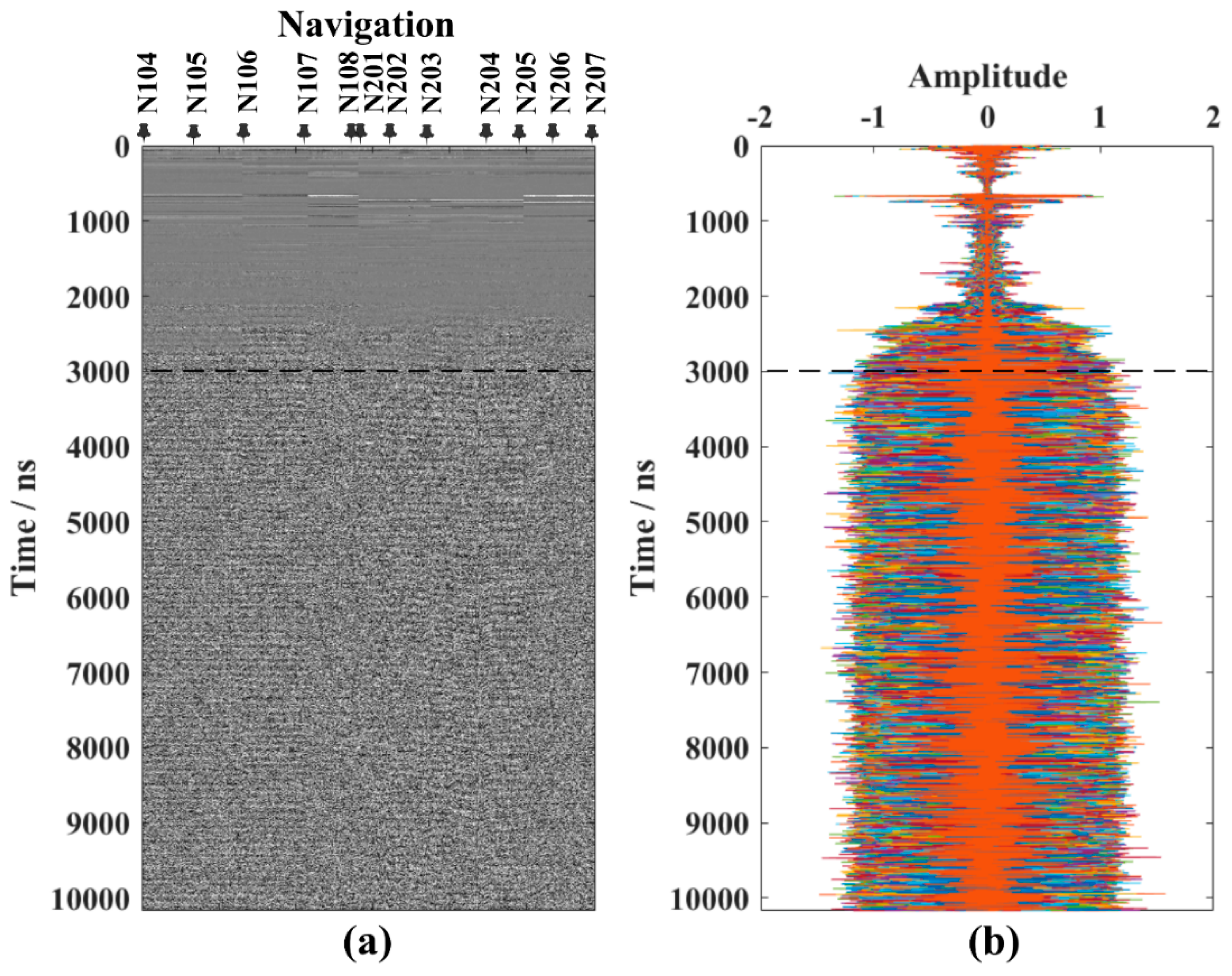
- Compared to the shallow signal, the energy of the deep electromagnetic signal is very weak. Gain should be processed to highlight the deep information (Figure 6).
- (3)
- Both the energies of the high-frequency and low-frequency information in the shallow part are strong. As the time delay increases, high-frequency energy is absorbed, and only some low-frequency information is left. For this kind of nonlinear frequency aliasing phenomenon, a nonlinear decomposition method must be processed.
3.2. CEEMD of the Trace at N104
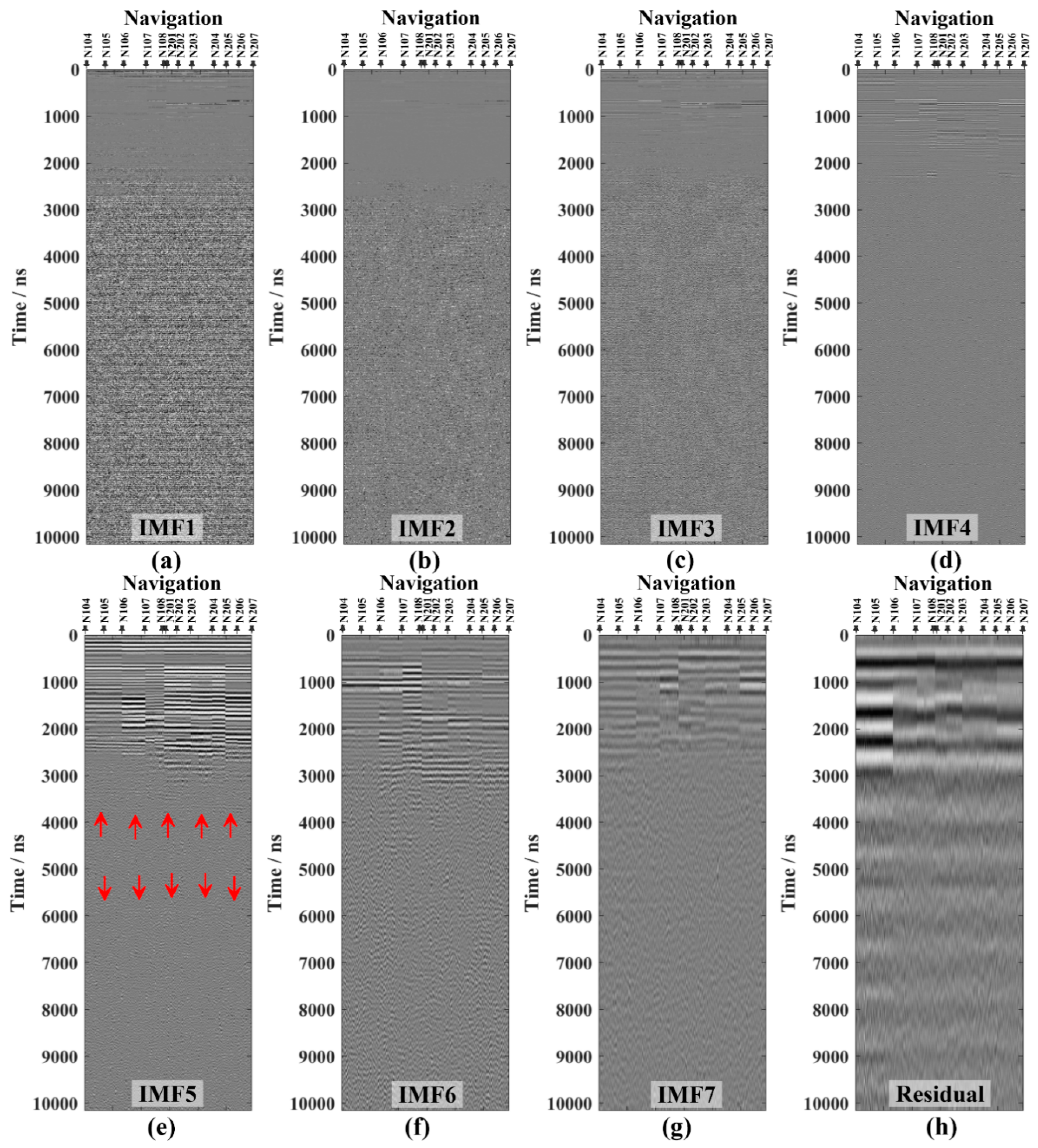
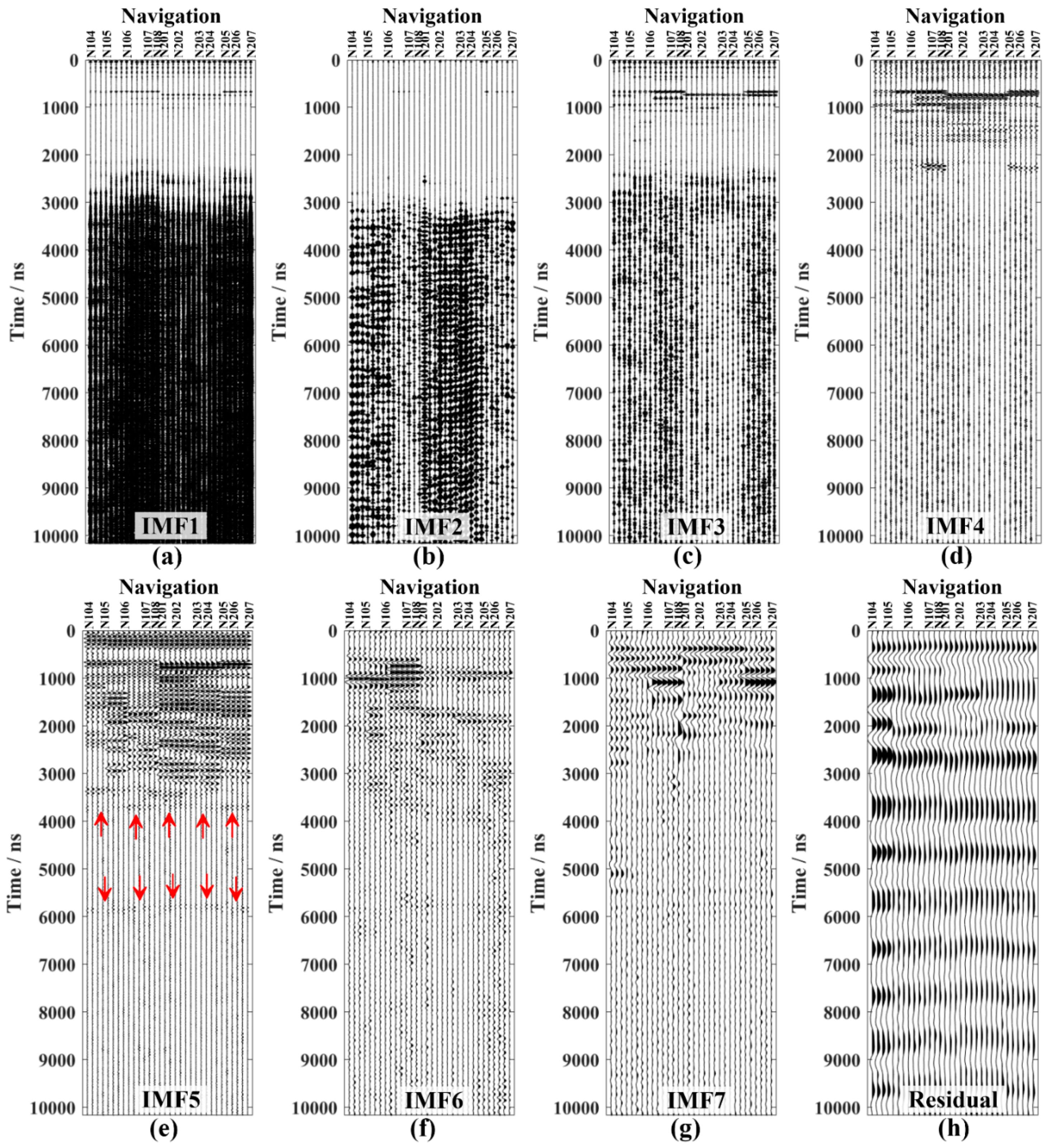
- (1)
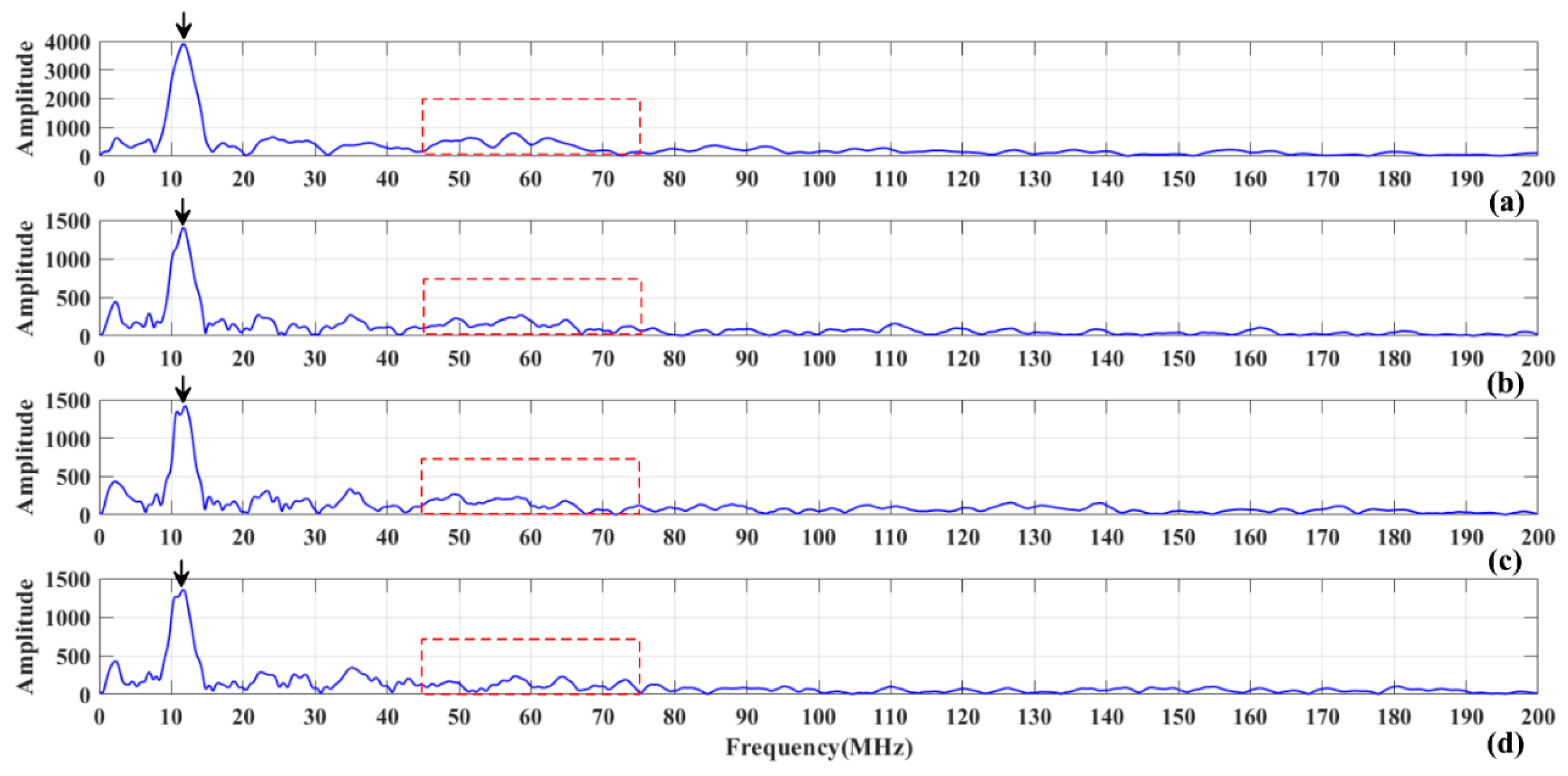
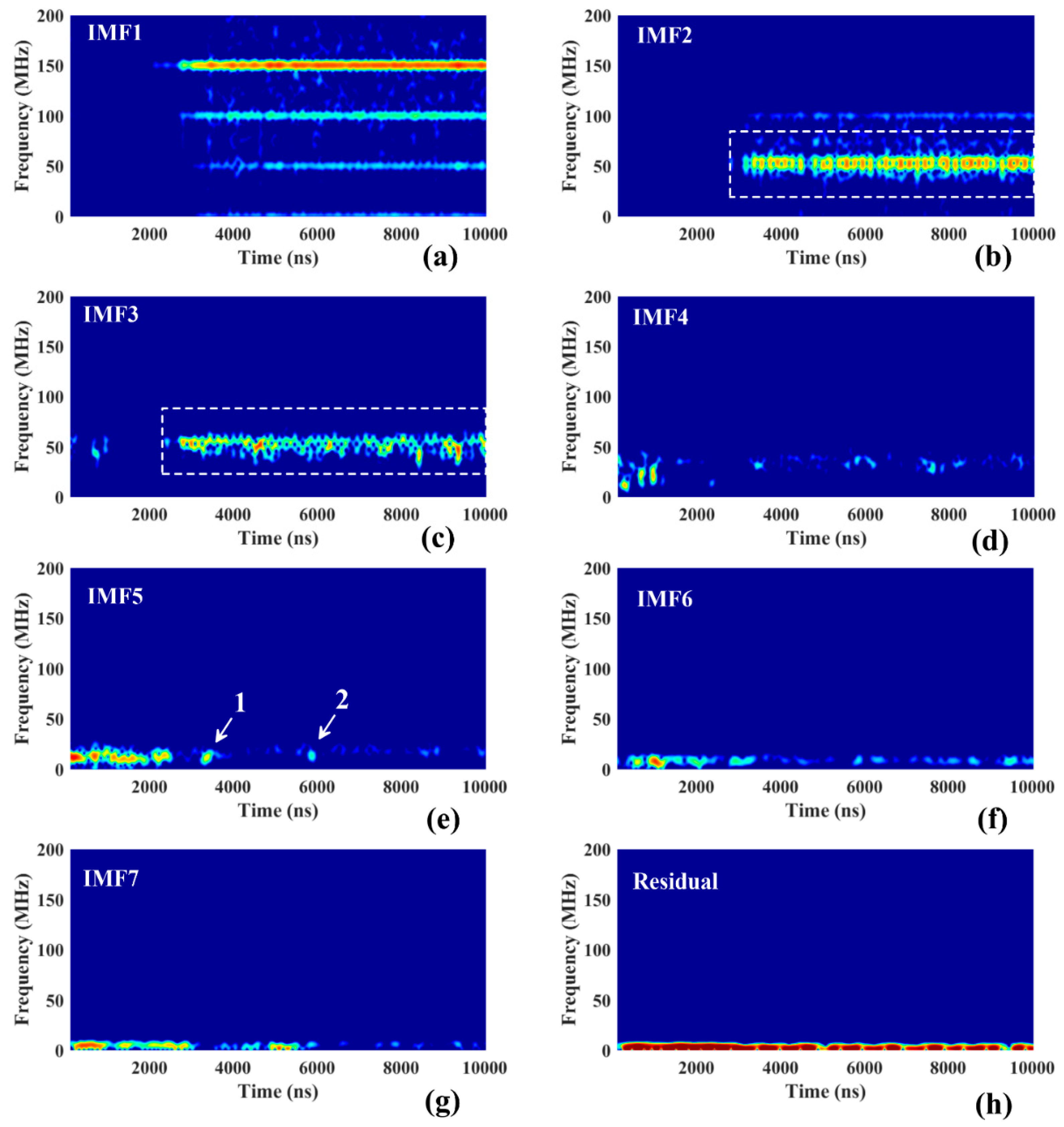
- In the STFT spectrum of the IMF1 component, energy is concentrated mainly at 150 MHz, and a small amount of energy is at 100 and 60 MHz; this component can be considered a high-frequency noise component.
- (2)
- In the STFT spectrum of the IMF2 and IMF3 components, the main energy is collected near 60 MHz, and some of the energy scattered around it is considered to be the component containing the useful signal.
- (3)
- The main energy in the STFT spectrum of the IMF4 component is collected near 30 MHz, which is considered to be a lower-frequency noise component.
- (4)
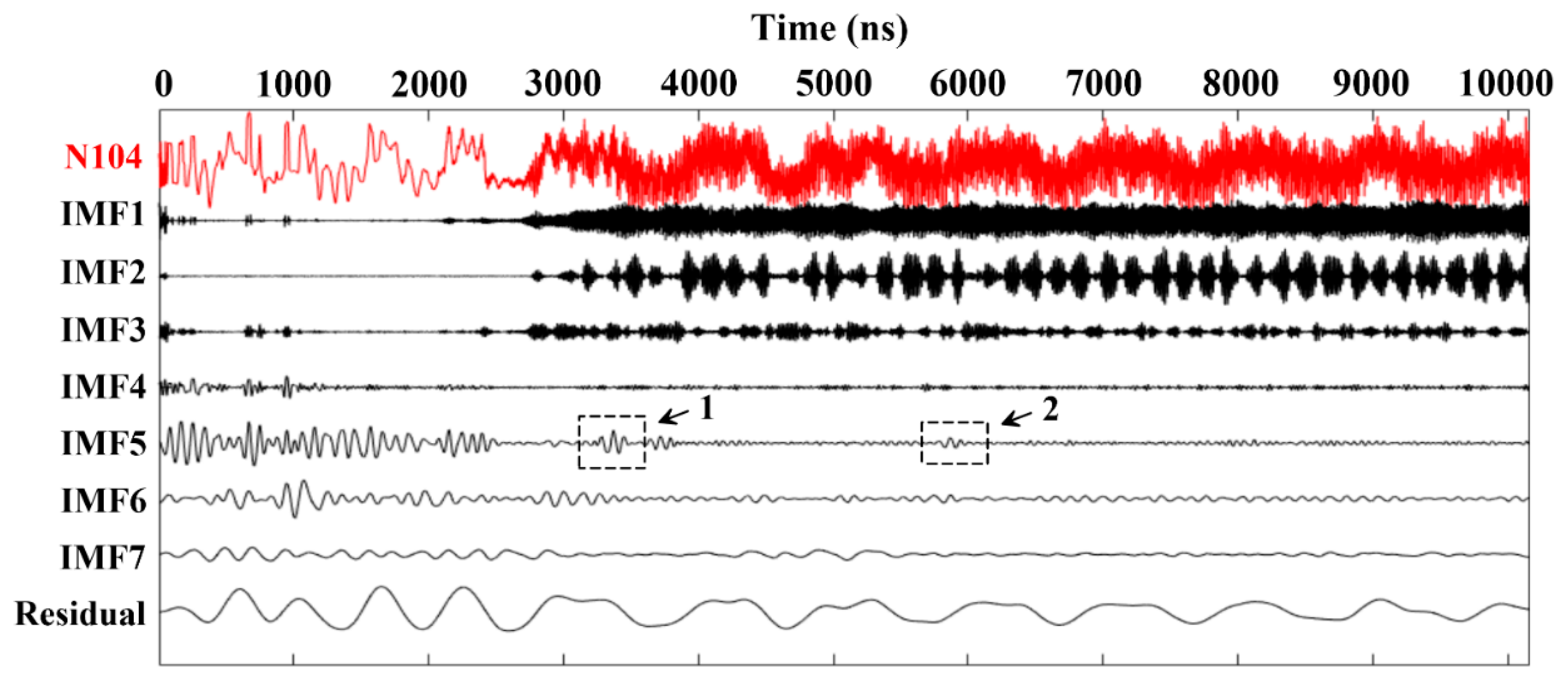
- Among the IMF components, IMF5 is worthy of attention. Two obvious energy information are observed from the component curve (in the IMF5 curve in Figure 7) and its STFT spectrum (Figure 8e), which are around 3500 and 5800 ns, respectively. The reflection of these two positions was used for reflection in the articles by Xiao et al. [6] and Zhang et al. [10], but it can be seen from the STFT spectrum that the frequency is between 10 and 15 MHz, and it is quite different from the center frequency of the transmitter. Li et al. also used the S transform and LPR ground data to verify the trap of these two pitfalls [20]. In summary, the IMF5 component is considered to be the unusable component.
- (5)
- The STFT spectra of IMF5, IMF6, and IMF7 and the residual component show that the energy is collected below 10 MHz, which is a low-frequency unwanted component.
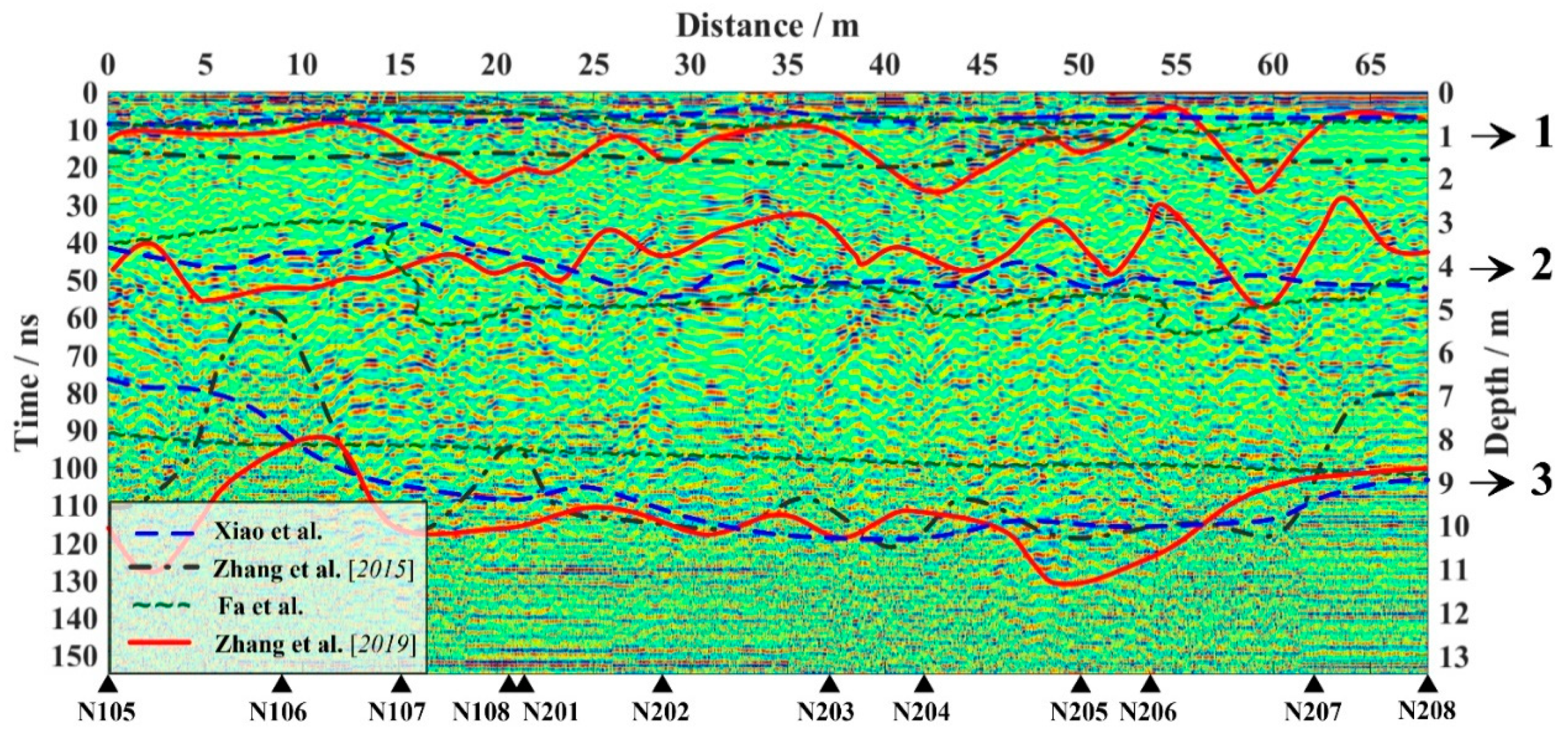
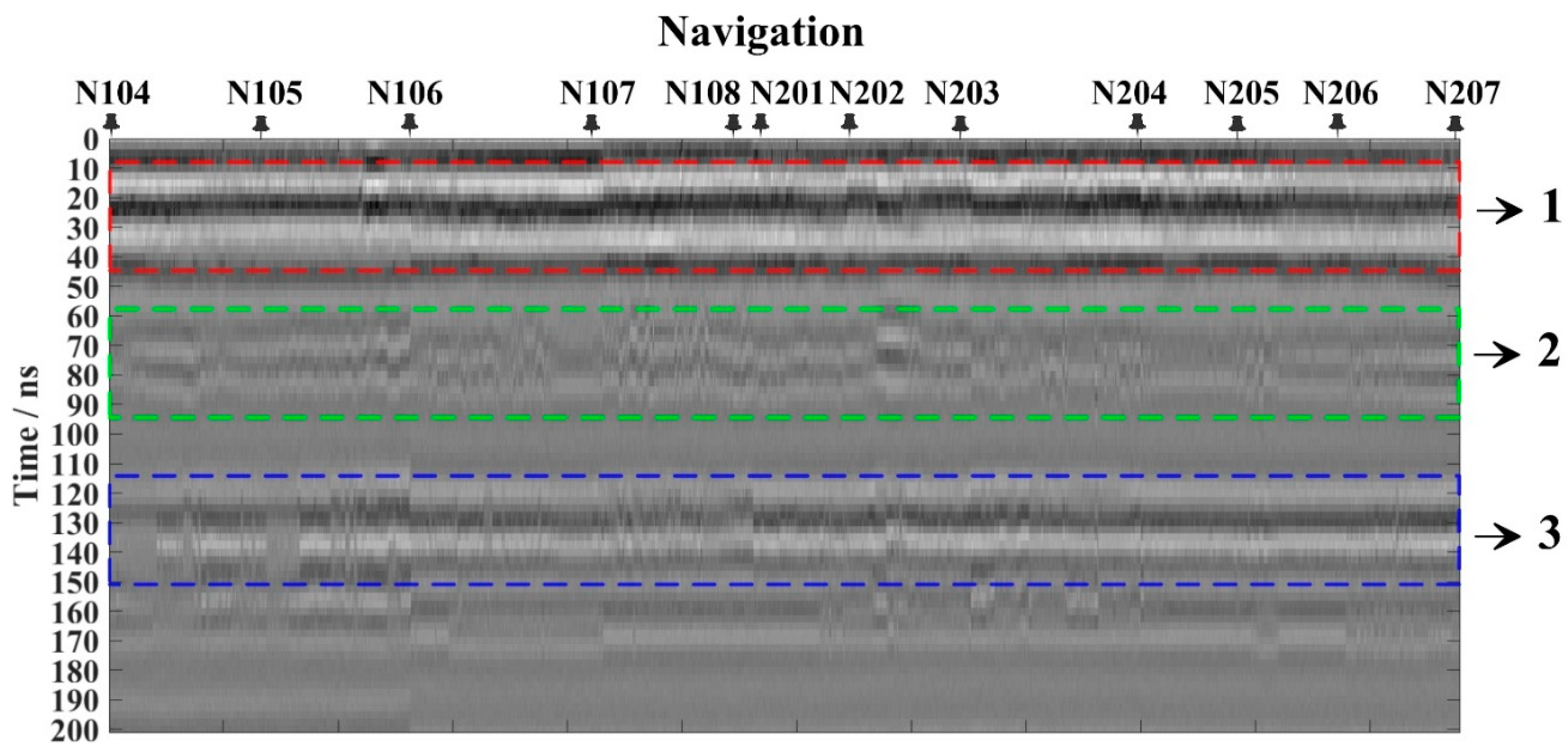
3.3. Data Interpretation
- The interface between the ejected materials of the Chang’E-3 crater and the lunar regolith;
- The interface between the lunar regolith and paleoregolith;
- The bedrock interface.
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| LPR | Lunar Penetrating Radar |
| CE-3 | Chang’E-3 |
| CE-4 | Chang’E-4 |
| CH-1 | The low-frequency channel |
| CH-2 | The high-frequency channel |
| HF | high-frequency |
| CEEMD | Complete Ensemble Empirical Mode Decomposition |
| DFR | dual-frequency radar on the rover |
| SAR | synthetic aperture radar |
| LRS | Lunar-Radar Sounder |
| SELENE | Japan’s Kaguya probes |
| LRO | Lunar-Reconnaissance-Orbiter |
| YR | Yutu rover |
| NAOC | National Astronomical Observatory of the Chinese Academy of Sciences |
| EMD | Empirical-Mode-Decomposition |
| IMF | intrinsic mode function |
| EEMF | Ensemble Empirical-Mode-Decomposition |
| NADA | new method of noise assisted data analysis |
| SNR | Signal-to-noise ratio |
| FD | frequency-domain |
| TFD | time–frequency domain |
| FT | Fourier transform |
| STFT | short-time Fourier transform |
| VMD | Variational Mode Decomposition |
References
- Phillips, R.J.; Adams, G.F.; Brown, W.E., Jr.; Eggleton, R.E.; Zelenka, J.S. Apollo Lunar Sounder Experiment. Apollo 17 Prelim. Sci. Rep. 1973, 330, 22. [Google Scholar]
- Ono, T.; Kumamoto, A.; Nakagawa, H.; Yamaguchi, Y.; Oshigami, S.; Yamaji, A.; Kobayashi, T.; Kasahara, Y.; Oya, H. Lunar radar sounder observations of subsurface layers under the nearside maria of the moon. Science 2009, 323, 909–912. [Google Scholar] [CrossRef]
- Spudis, P.D.; Bussey, B.; Lichtenberg, C.; Marinelli, B.; Nozette, S. Mini-sar: An imaging radar for the chandrayaan-1 mission to the moon. Curr. Sci. 2005, 96, 533–539. [Google Scholar]
- Calla, O.P.N.; Mathur, S.; Jangid, M.; Gadri, K.L. Circular polarization characteristics of south polar lunar craters using chandrayaan-1 mini-sar and lro mini-rf. Earth Moon Planets 2015, 115, 83–100. [Google Scholar] [CrossRef]
- Patterson, G.W.; Stickle, A.M.; Turner, F.S.; Jensen, J.R.; Jakowatz, C.V. Bistatic radar observations of the moon using mini-rf on lro and the arecibo observatory. Icarus 2016, 283, 2–19. [Google Scholar] [CrossRef]
- Xiao, L.; Zhu, P.; Fang, G.; Xiao, Z.; Zou, Y.; Zhao, J.; Zhao, N.; Yuan, Y.; Qiao, L.; Zhang, X.; et al. A young multilayered terrane of the northern mare imbrium revealed by chang’e-3 mission. Science 2015, 347, 1226–1229. [Google Scholar] [CrossRef] [PubMed]
- Fang, G.-Y.; Zhou, B.; Ji, Y.-C.; Zhang, Q.-Y.; Shen, S.-X.; Li, Y.-X.; Guan, H.F.; Tang, C.J.; Gao, Y.Z.; Lu, W.; et al. Lunar penetrating radar onboard the chang’e-3 mission. Res. Astron. Astrophys. 2014, 14, 1607–1622. [Google Scholar] [CrossRef]
- Wilhelms, D.E.; Mccauley, J.F.; Trask, N.J. The Geologic History of the Moon; United States Government Publishing Office: Washington, DC, USA, 1987.
- Su, Y.; Fang, G.-Y.; Feng, J.-Q.; Xing, S.-G.; Ji, Y.-C.; Zhou, B.; Gao, Y.Z.; Li, H.; Dai, S.; Xiao, Y.; et al. Data processing and initial results of Chang’e-3 lunar penetrating radar. Res. Astron. Astrophys. 2014, 14, 1623–1632. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, W.; Hu, S.; Lin, Y.; Fang, G.; Li, C.; Peng, W.; Zhu, S.; He, Z.; Zhou, B. Volcanic history of the imbrium basin: A close-up view from the lunar rover yutu. Proc. Natl. Acad. Sci. USA 2015, 112, 5342–5347. [Google Scholar] [CrossRef]
- Fa, W.; Zhu, M.H.; Liu, T.; Plescia, J.B. Regolith stratigraphy at the chang’e-3 landing site as seen by lunar penetrating radar. Geophys. Res. Lett. 2015, 42, 179–187. [Google Scholar] [CrossRef]
- Lai, J.L.; Xu, Y.; Zhang, X.P.; Tang, Z.S. Structural analysis of lunar subsurface with Chang'E-3 lunar penetrating radar. Planet. Space Sci. 2016, 120, 96–102. [Google Scholar] [CrossRef]
- Zhang, L.; Zeng, Z.; Li, J.; Lin, J.; Hu, Y.; Wang, X.; Sun, X. Simulation of the lunar regolith and lunar-penetrating radar data processing. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2018, 11, 655–663. [Google Scholar] [CrossRef]
- Zhang, L.; Zeng, Z.F.; Li, J.; Huang, L.; Huo, Z.J.; Wang, K.; Zhang, J.M. A Story of Regolith Told by Lunar Penetrating Radar. Icarus 2019, 321, 148–160. [Google Scholar] [CrossRef]
- Dong, Z.; Fang, G.; Ji, Y.; Gao, Y.; Zhang, X. Parameters and structure of lunar regolith in chang’e-3 landing area from lunar penetrating radar (lpr) data. Icarus 2016, 282, 40–46. [Google Scholar] [CrossRef]
- Zhang, L.; Zeng, Z.; Li, J.; Huang, L.; Huo, Z.; Wang, K.; Zhang, J. Parameter Estimation of Lunar Regolith from Lunar Penetrating Radar Data. Sensors 2018, 18, 2907. [Google Scholar] [CrossRef]
- Wang, K.; Zeng, Z.; Zhang, L.; Xia, S.; Li, J. A Compressive Sensing-Based Approach to Reconstructing Regolith Structure from Lunar Penetrating Radar Data at the Chang’E-3 Landing Site. Remote Sens. 2018, 10, 1925. [Google Scholar] [CrossRef]
- Zhang, J.; Zeng, Z.; Zhang, L.; Lu, Q.; Wang, K. Application of Mathematical Morphological Filtering to Improve the Resolution of Chang’e-3 Lunar Penetrating Radar Data. Remote Sens. 2019, 11, 524. [Google Scholar] [CrossRef]
- Hu, B.; Wang, D.; Zhang, L.; Zeng, Z. Rock Location and Quantitative Analysis for Regolith on Chang’e 3 Landing Site Based on Local Similarity Constraint. Remote Sens. 2019, 11, 530. [Google Scholar] [CrossRef]
- Li, C.; Xing, S.; Lauro, S.E.; Su, Y.; Pettinelli, E. Pitfalls in gpr data interpretation: False reflectors detected in lunar radar cross sections by chang’e-3. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1325–1335. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. London Ser. A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal, Prague, Czech Republic, 22–27 May 2011; pp. 22–27. [Google Scholar]
- Jia, Z.; Liu, S.; Zhang, L.; Hu, B.; Zhang, J. Weak Signal Extraction from Lunar Penetrating Radar Channel 1 Data Based on Local Correlation. Electronics 2019, 8, 573. [Google Scholar] [CrossRef]
- Cheng, S.; Liu, S.; Guo, J.; Luo, K.; Zhang, L.; Tang, X. Data Processing and Interpretation of Antarctic Ice-Penetrating Radar Based on Variational Mode Decomposition. Remote Sens. 2019, 11, 1253. [Google Scholar] [CrossRef]
- Li, J.; Liu, C.; Zeng, Z.; Chen, L. GPR Signal Denoising and Target Extraction with the CEEMD Method. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1615–1619. [Google Scholar]
- Li, J.; Zeng, Z.; Liu, C.; Huai, N.; Wang, K. A study on Lunar regolith quantitative random model and lunar penetrating radar parameter inversion. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1953–1957. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Processing | Interpretative Statement | |
|---|---|---|
| i | Data reading | The data is decomposed into 9 parts. According to their storage format (*.psd, which is the standard storage format for aerospace and aerospace), data and location information will be read one by one. |
| ii | Data registration | The data is split into 9 parts and ought to be stitched together. |
| iii | Time lag adjustment | The arrival time of the radar echo is delayed by 69.664 ns, which corresponds to the start time of the recorded data. |
| iv | Deep useless data deleting | As the SNRs of Part 1 and Part 2 are low and the rest of the data are not collected, the last 10,000 ns of data without the study value needs to be deleted. |
| v | Low SNR traces deleting | Some parts with low SNR should be removed. |
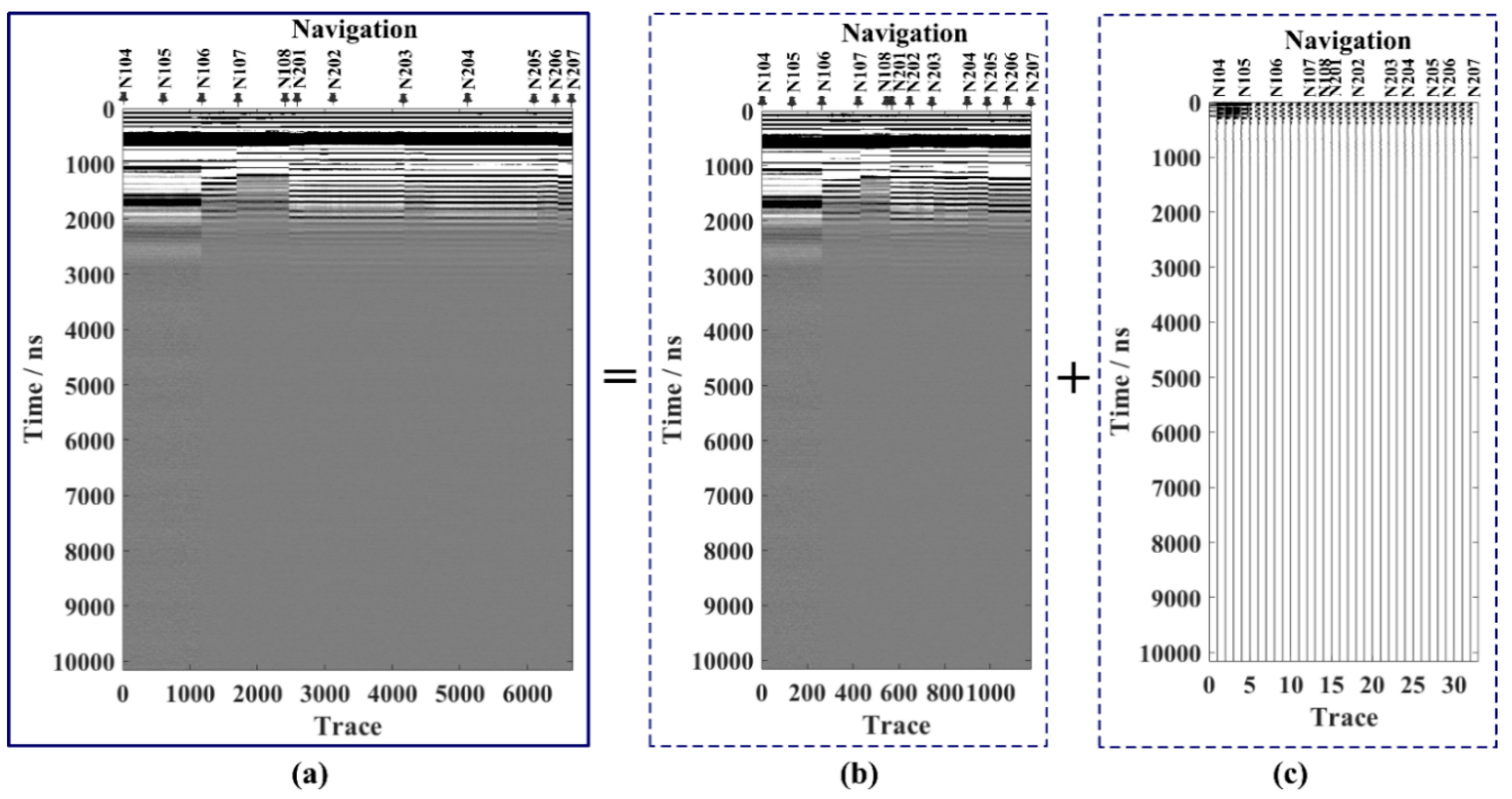
| vi | Traces selecting | Rover patrols are uneven because the rover may stop at a waypoint to collect other scientific data, for example, APXS data, VNIS data, and so forth. However, LPR never stops collecting data, which results in multiple acquisitions of multiple traces at the same place. The repeating traces are stacked and averaged. Two sets of data are obtained. One is all data without a copy track, and the other is a repeating track that has been stacked and averaged at the waypoint. |
| vii | Location | Location information is added to the image. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, C.; Zhang, G.; Zhang, J.; Jia, Z. Time–Frequency Attribute Analysis of Channel 1 Data of Lunar Penetrating Radar. Appl. Sci. 2020, 10, 535. https://doi.org/10.3390/app10020535
Xu C, Zhang G, Zhang J, Jia Z. Time–Frequency Attribute Analysis of Channel 1 Data of Lunar Penetrating Radar. Applied Sciences. 2020; 10(2):535. https://doi.org/10.3390/app10020535
Chicago/Turabian StyleXu, Chenyang, Gongbo Zhang, Jianmin Zhang, and Zhuo Jia. 2020. "Time–Frequency Attribute Analysis of Channel 1 Data of Lunar Penetrating Radar" Applied Sciences 10, no. 2: 535. https://doi.org/10.3390/app10020535
APA StyleXu, C., Zhang, G., Zhang, J., & Jia, Z. (2020). Time–Frequency Attribute Analysis of Channel 1 Data of Lunar Penetrating Radar. Applied Sciences, 10(2), 535. https://doi.org/10.3390/app10020535