State of Charge Estimation for Lithium-Ion Power Battery Based on H-Infinity Filter Algorithm




Abstract
1. Introduction
2. Establishment of Fractional-Order Model and Parameter Identification
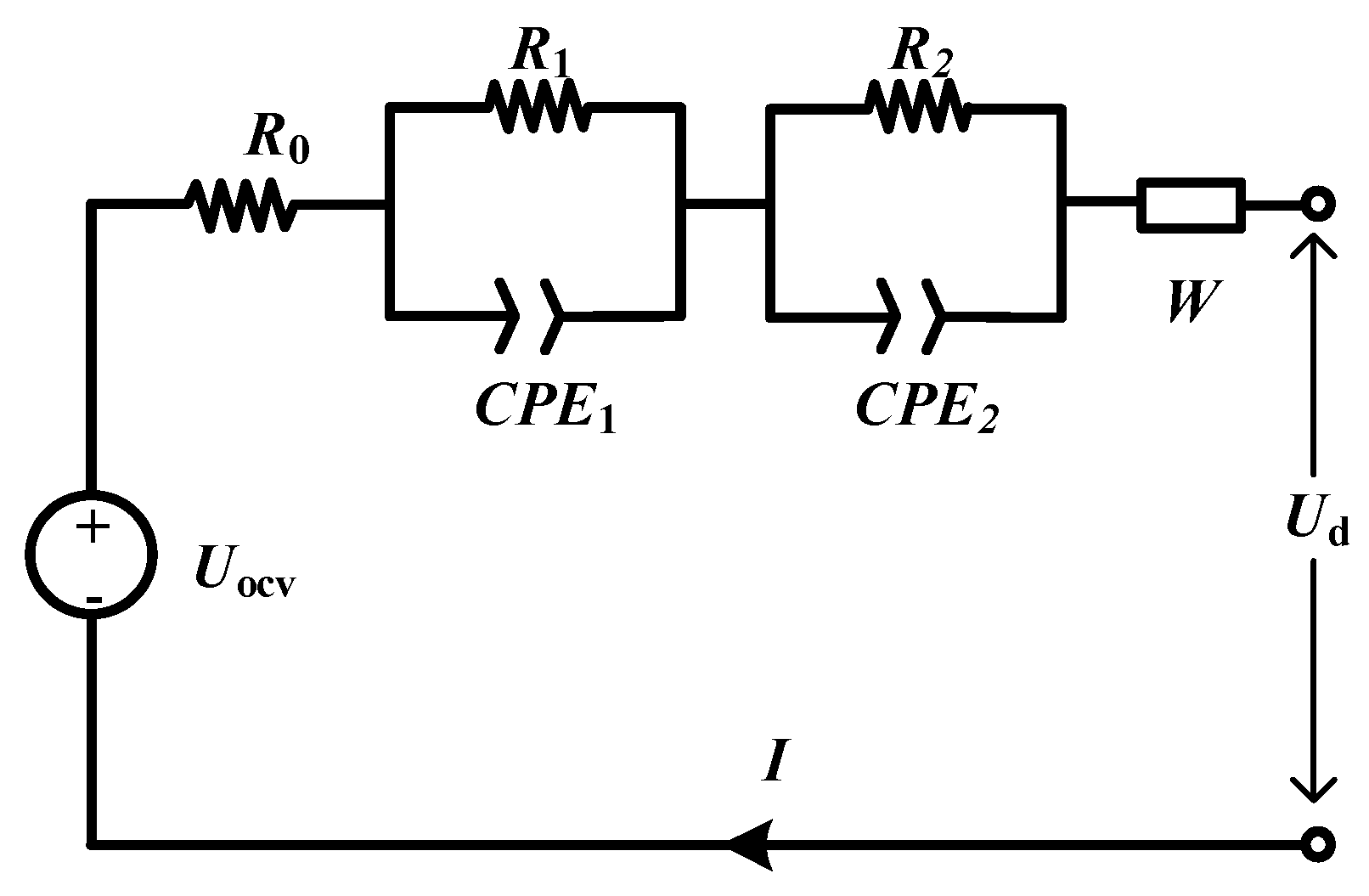
2.1. Establishment of Fractional-Order Model
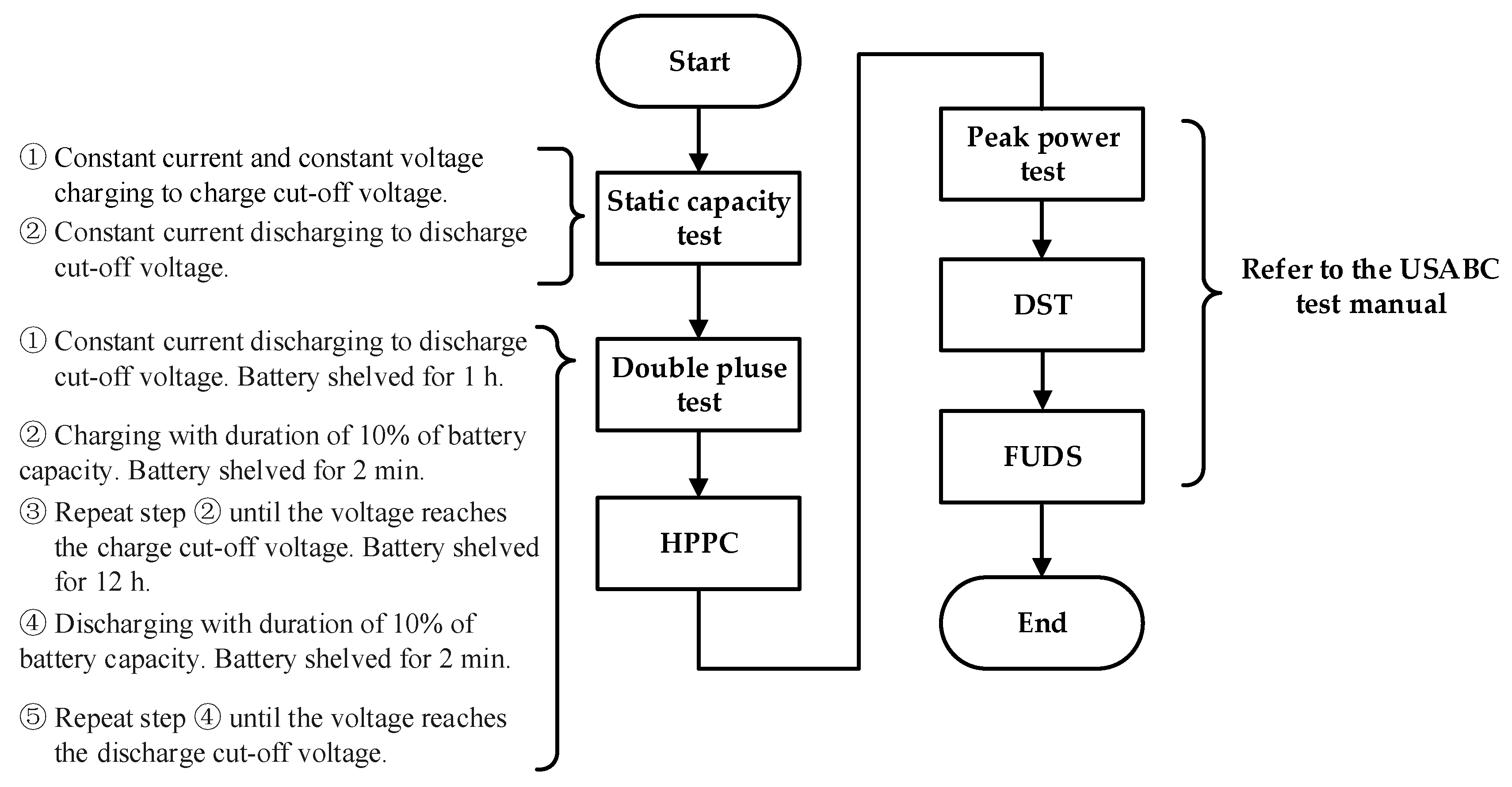
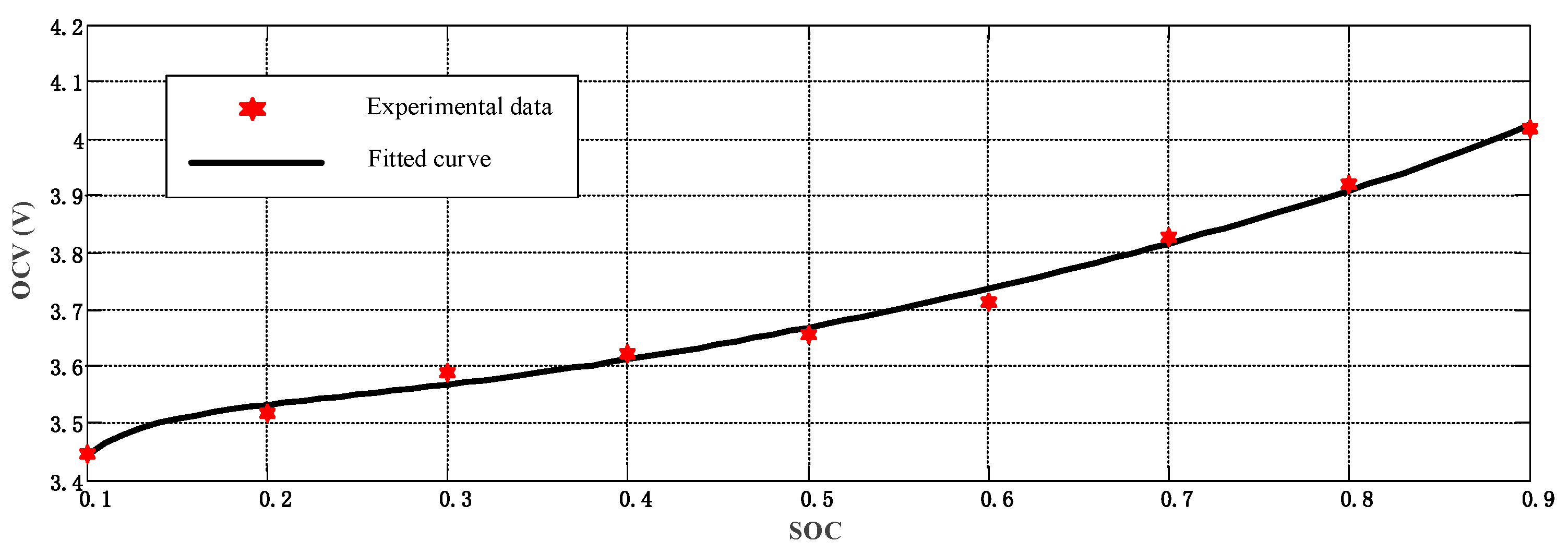
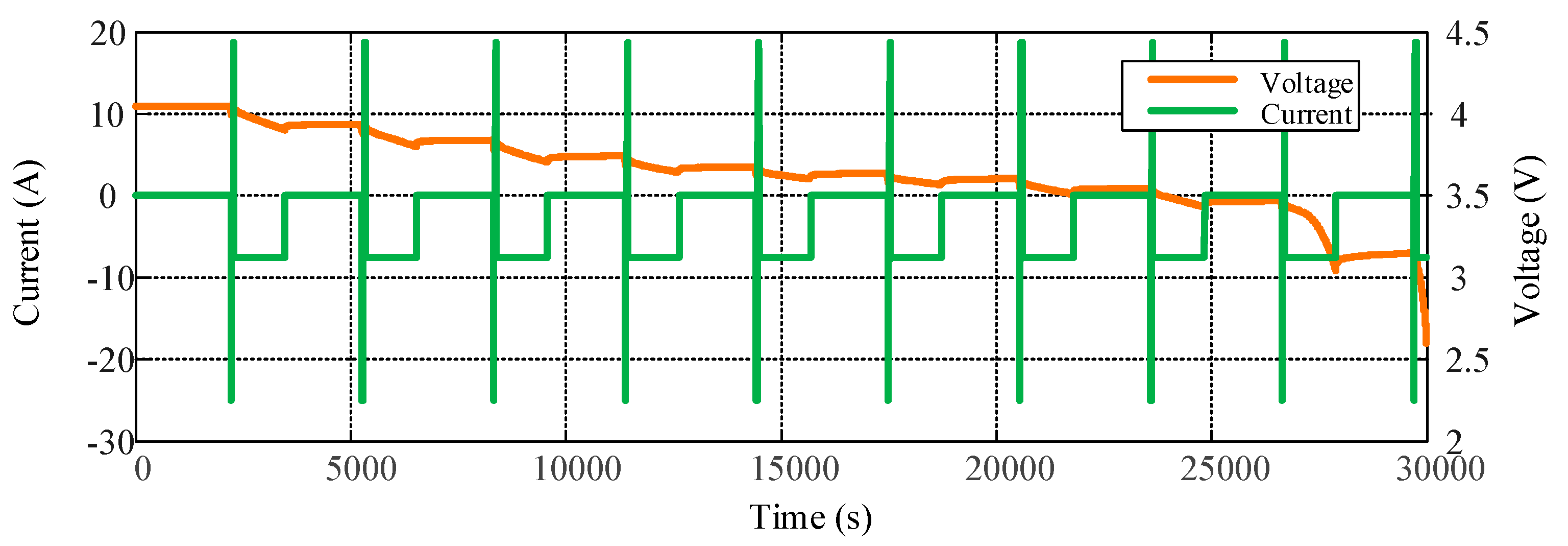
2.2. Lithium-Ion Battery Test Experiment
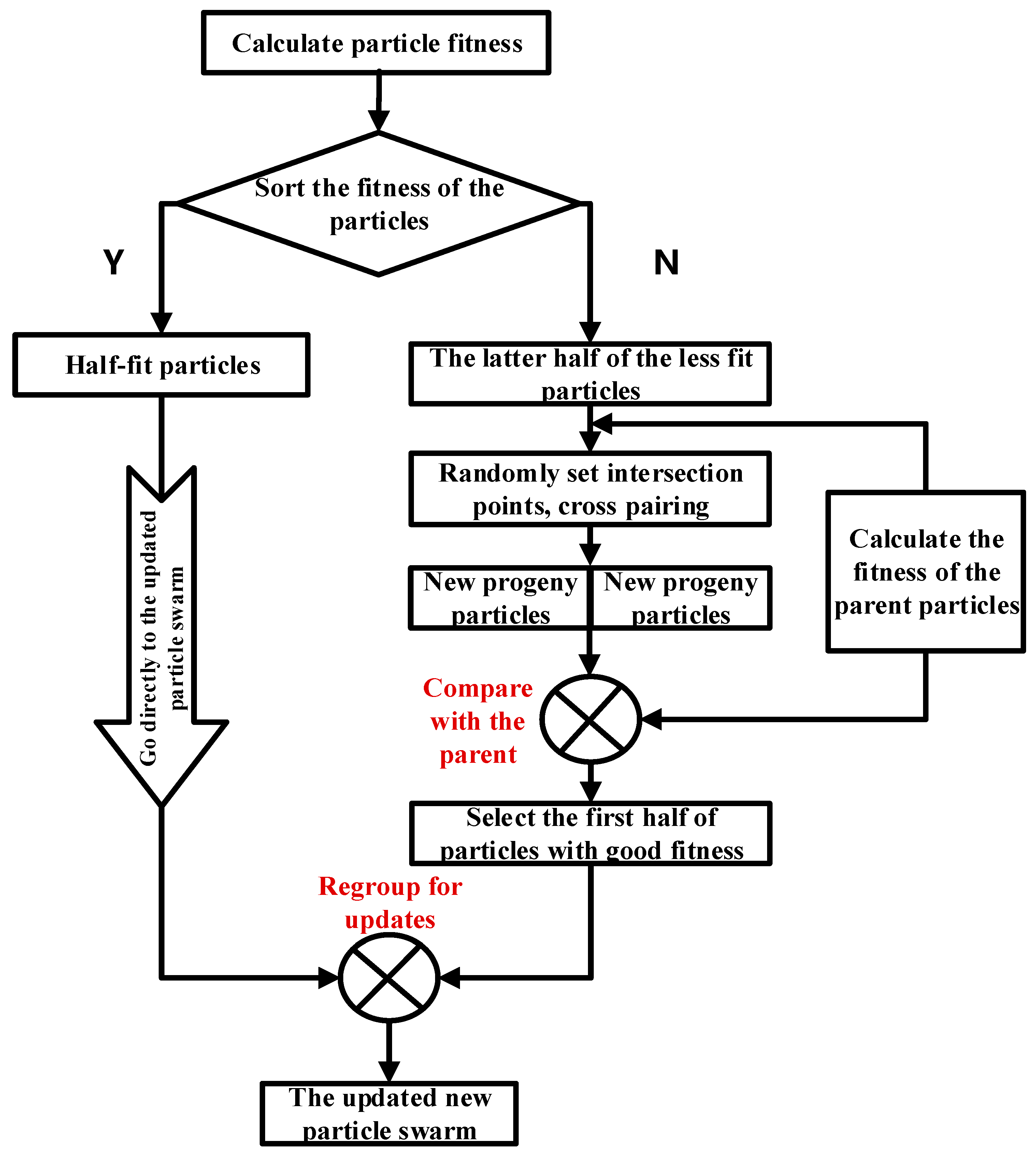
2.3. Model Parameter Identification Based on HPSO
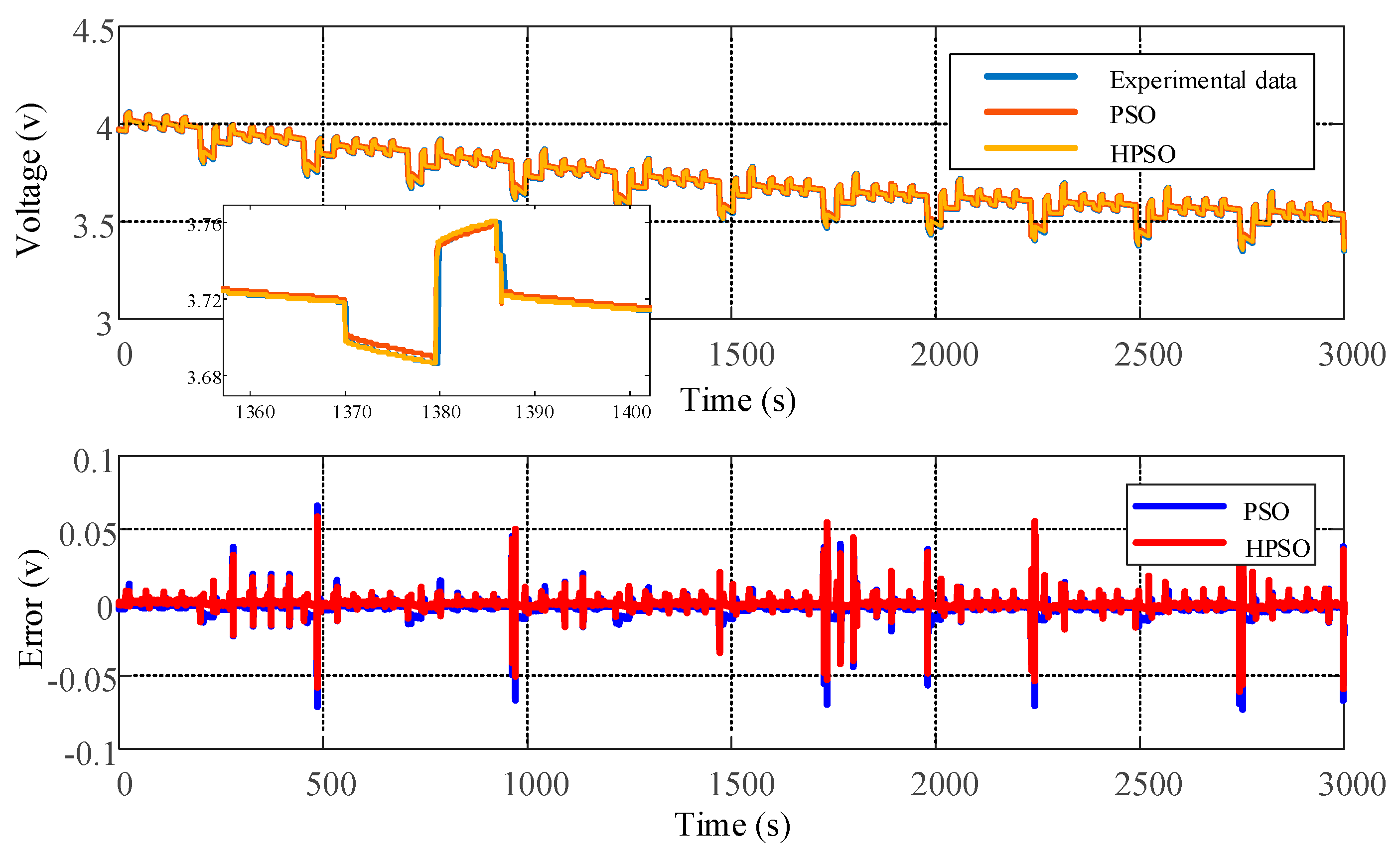
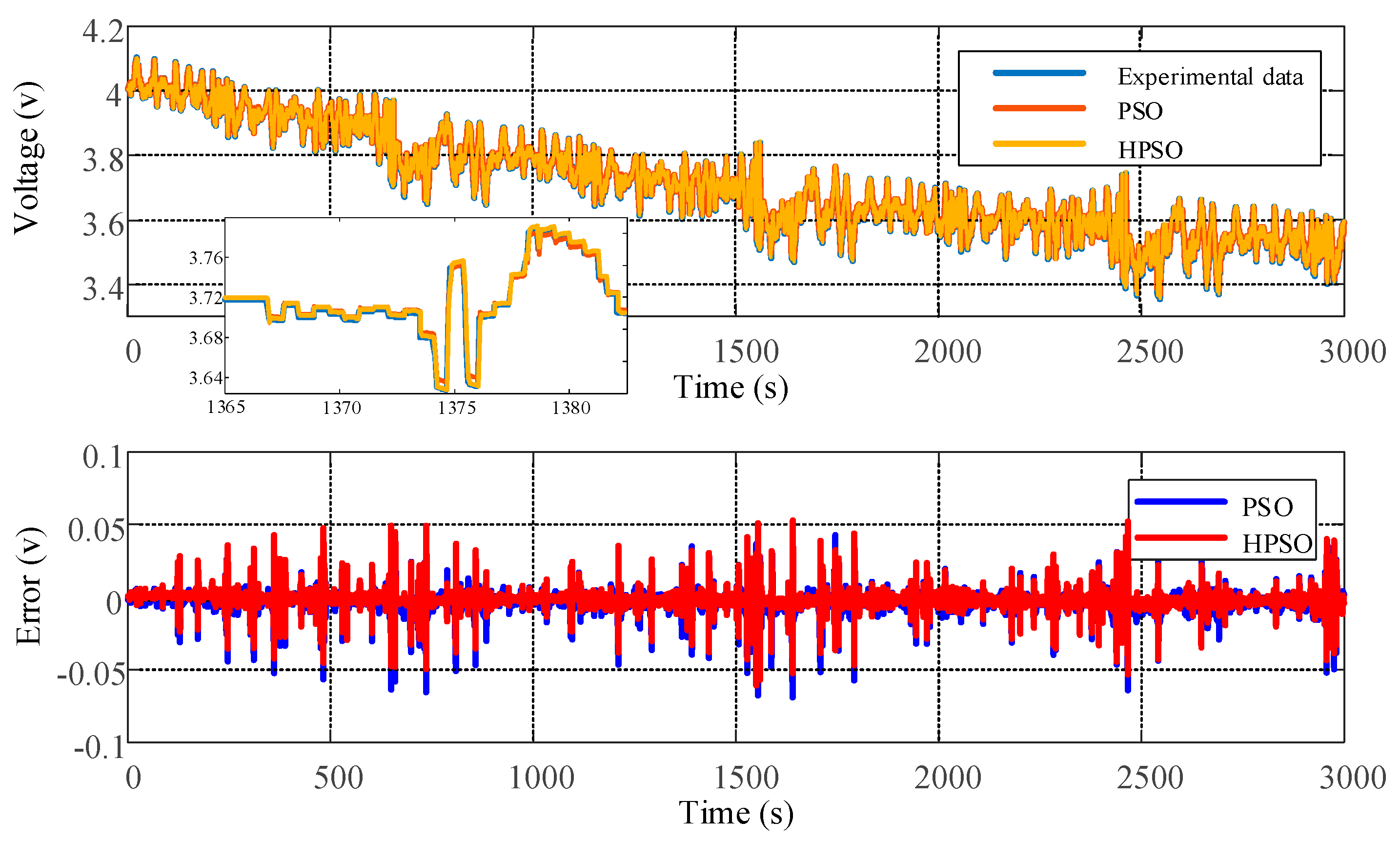
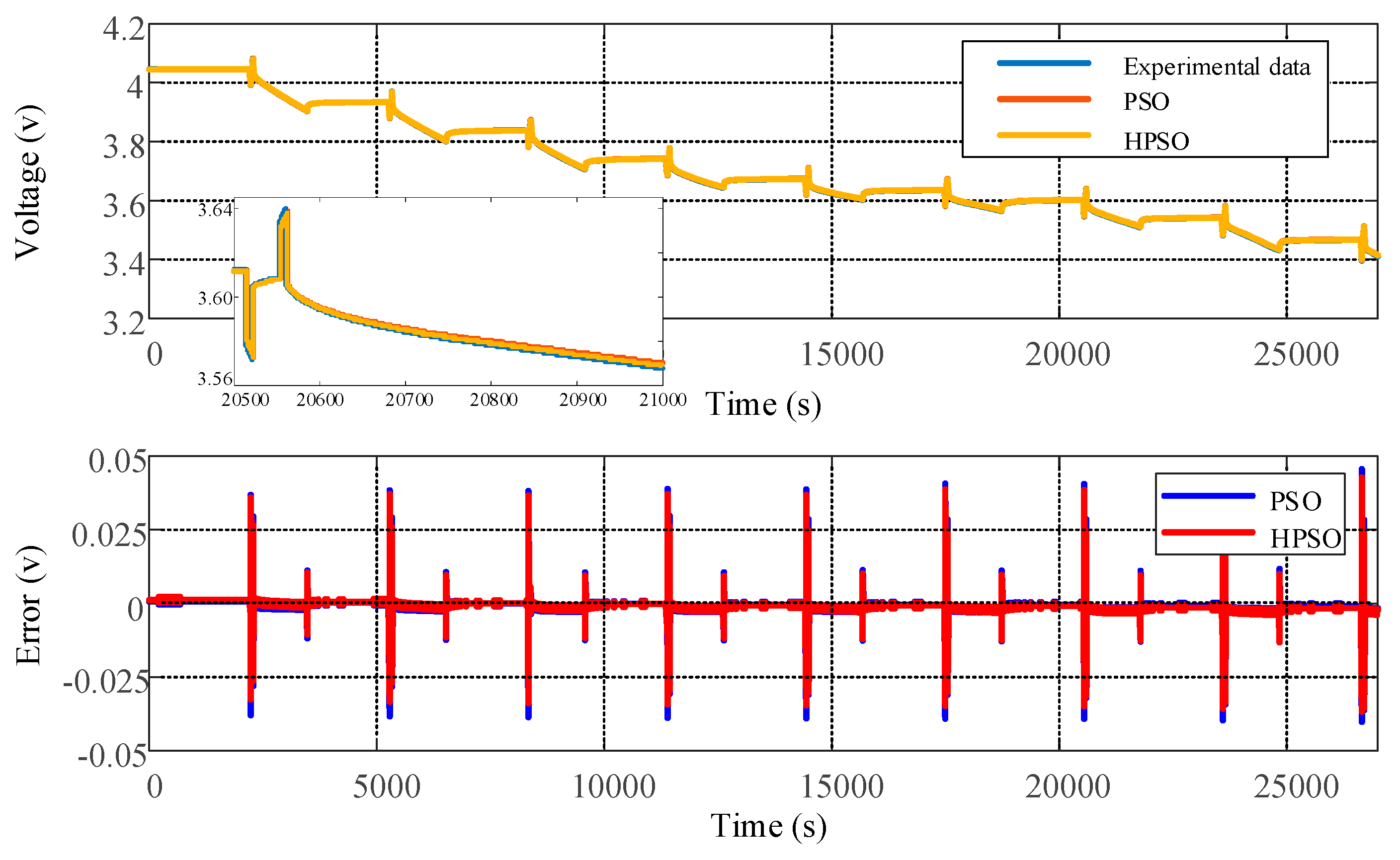
2.4. Fractional-Order Model Accuracy Analysis
3. SOC Estimation Based on the HIF Algorithm
3.1. State Space Equation of the Lithium-Ion Battery
3.2. SOC Estimation Based on HIF Algorithm
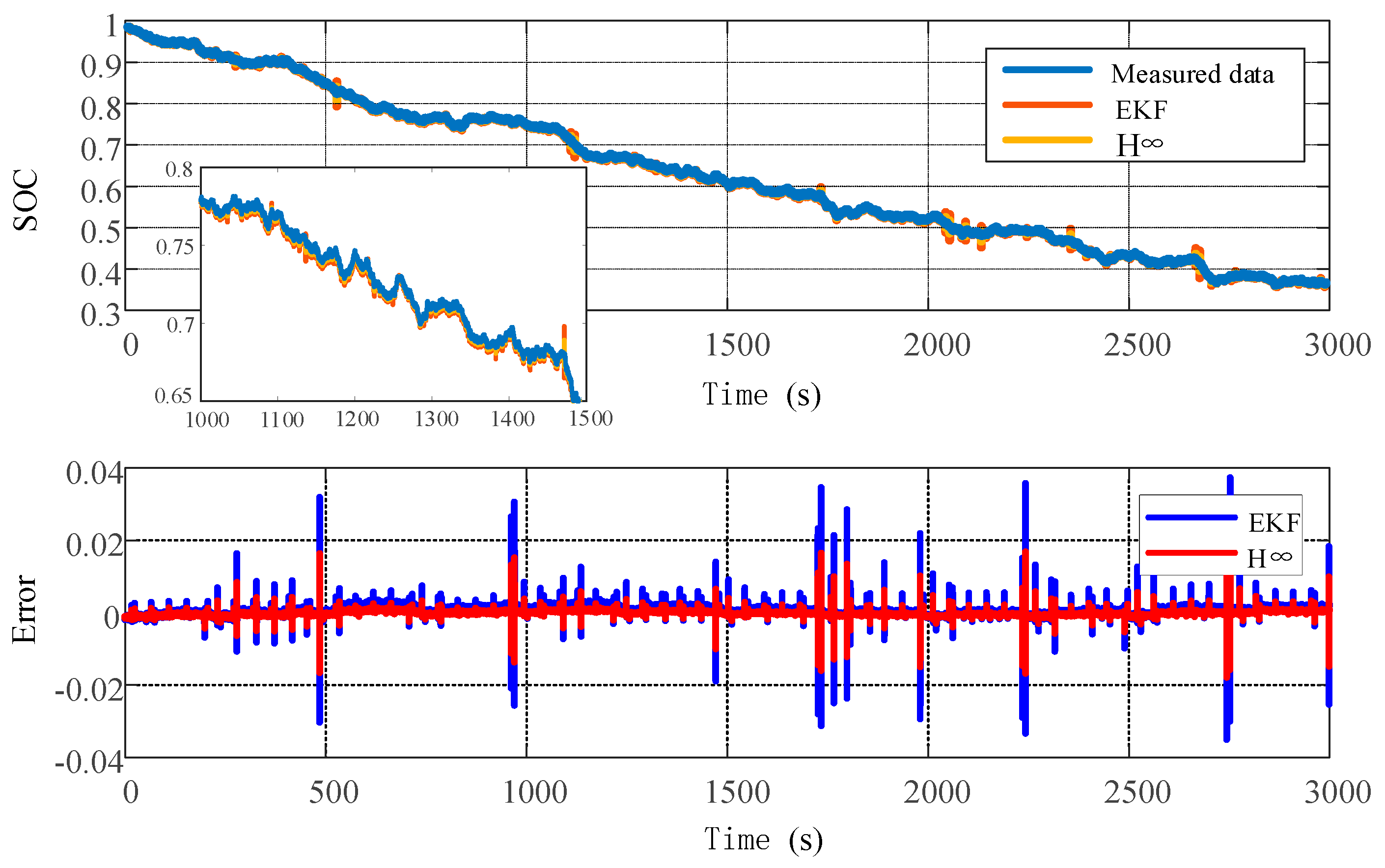
3.3. SOC Estimation Accuracy Verification
3.3.1. Uncertainty of Measurement Accuracy
3.3.2. Uncertainty of SOC Initial Value
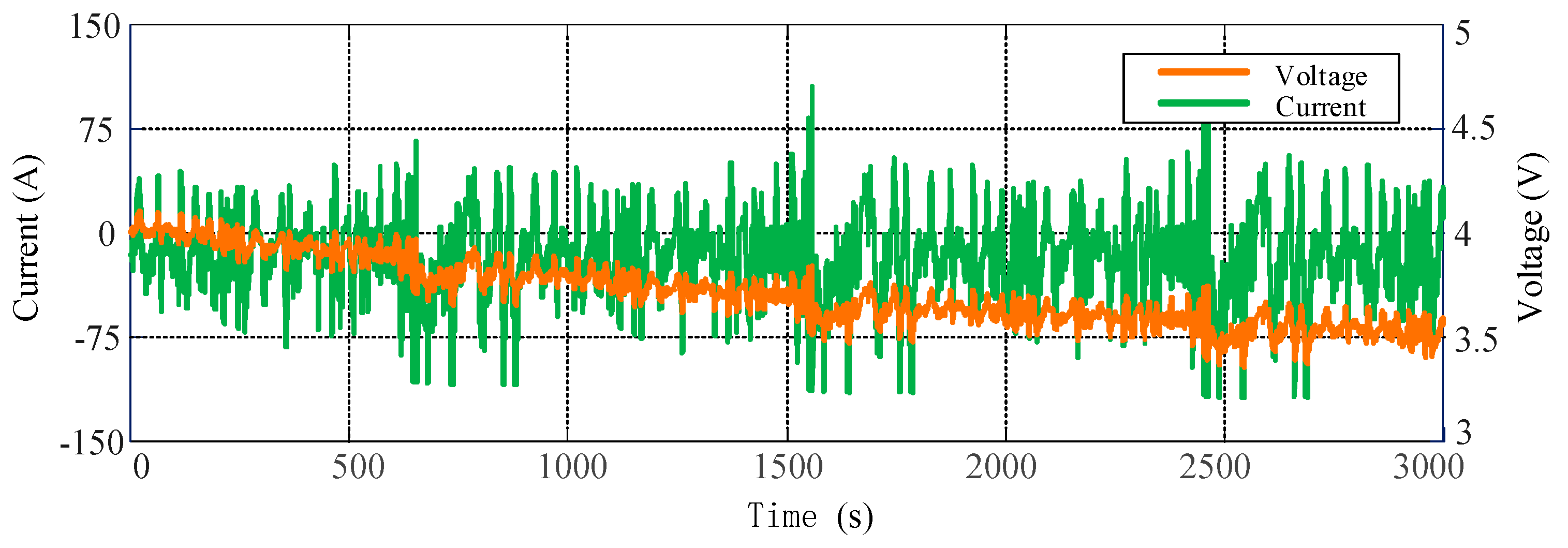
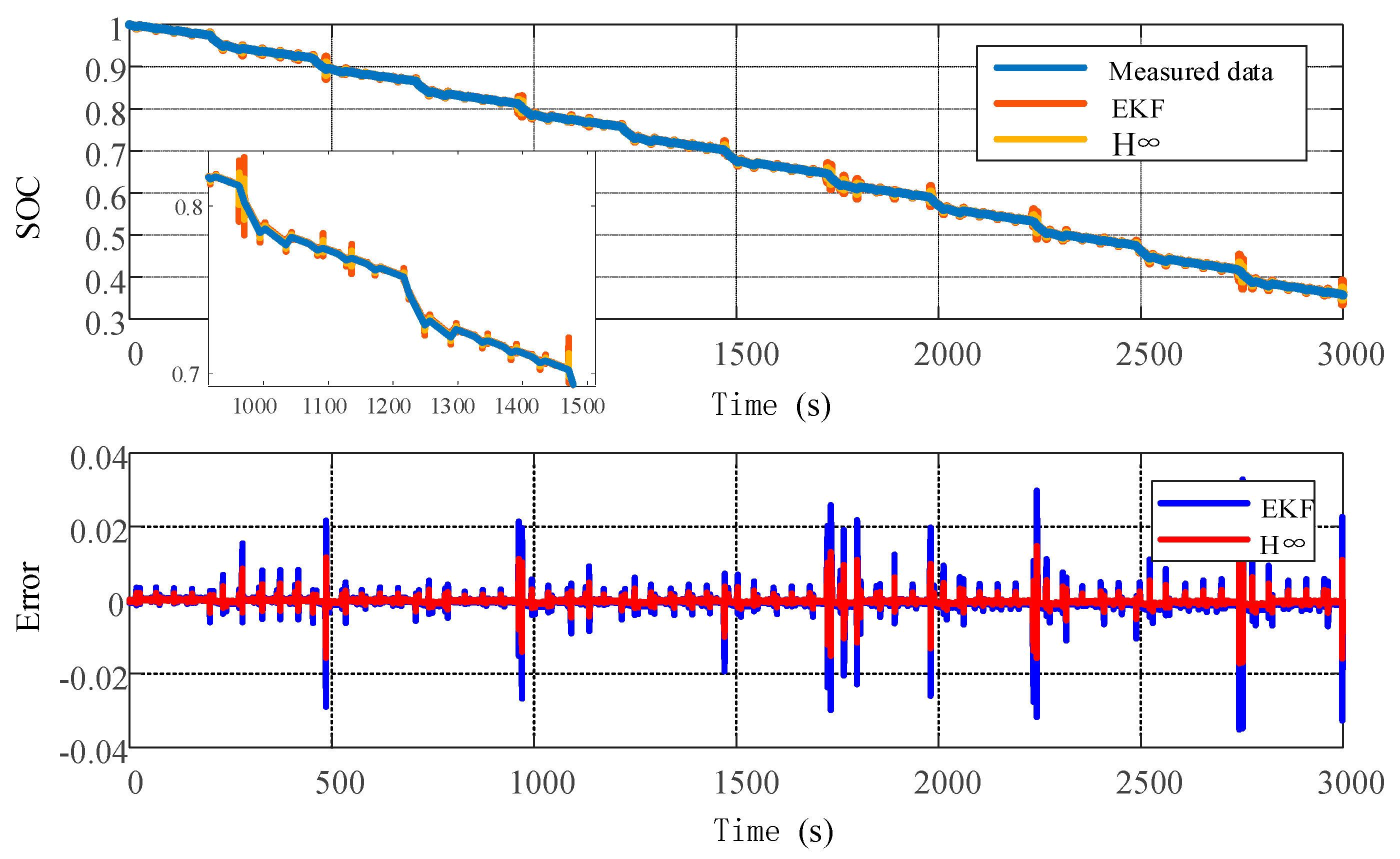
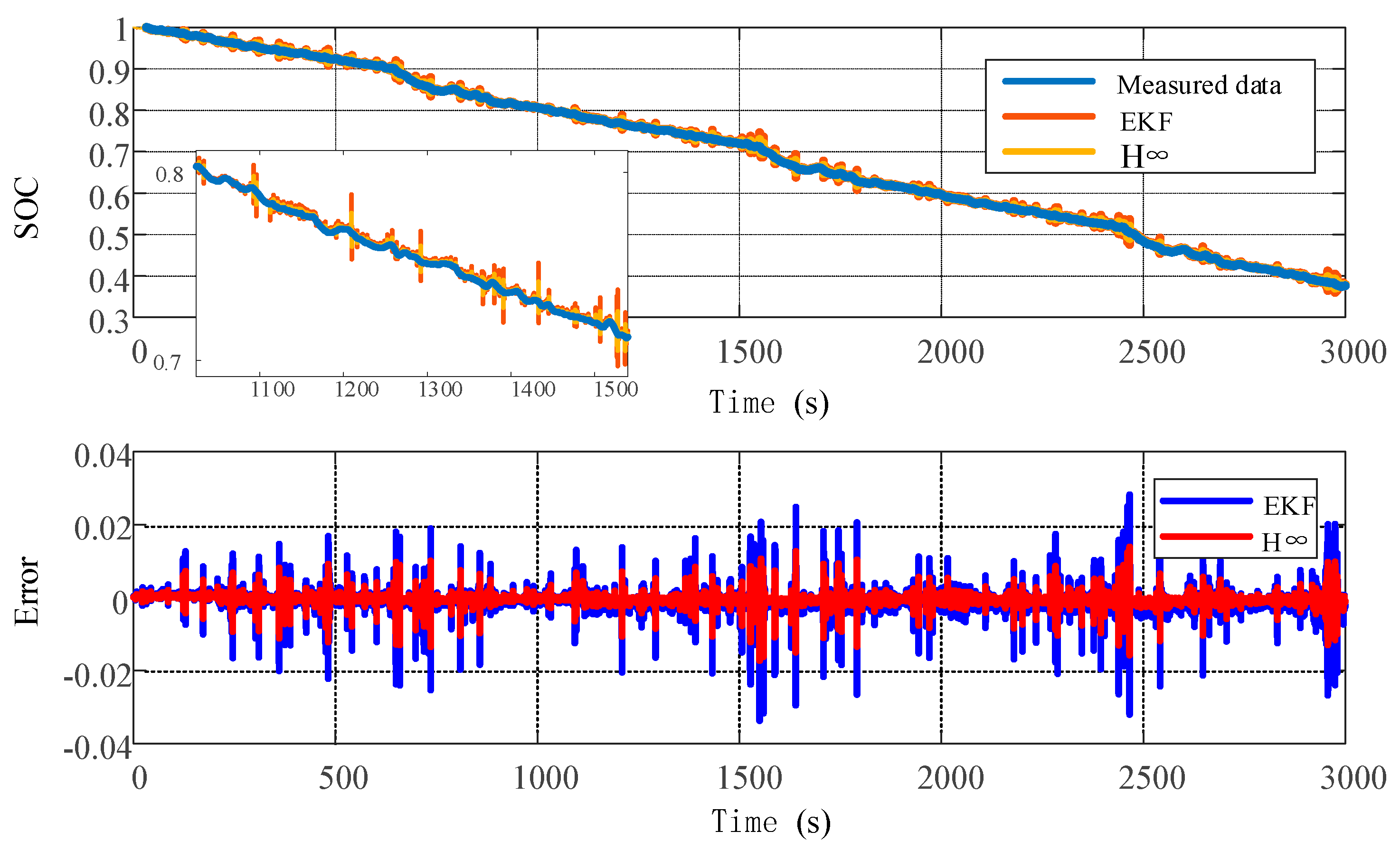
3.3.3. Uncertainty of Application Conditions
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| SOC | state of charge |
| HIF | H-infinity filter |
| HPSO | hybrid particle swarm optimization |
| EKF | extended Kalman filter |
| OCV | open circuit voltage |
| EIS | electrochemical impedance spectroscopy |
| SVM | support vector machine |
| NN | neural network |
| PF | particle filter |
| KF | Kalman filter |
| AUKF | adaptive unscented Kalman filter |
| AHIF | adaptive H-infinity filter |
| CPE | constant phase element |
| GA | genetic algorithm |
| DST | dynamic stress test |
| FUDS | federal urban driving schedule |
| HPPC | hybrid pulse power characteristic |
| RMSE | root mean square error |
References
- Xiong, R.; Cao, J.; Yu, Q.; He, H.; Sun, F. Critical review on the battery state of charge estimation methods for electric vehicles. IEEE Access 2018, 6, 1832–1843. [Google Scholar] [CrossRef]
- Chaoui, H.; Ibe-Ekeocha, C.C. State of charge and state of health estimation for lithium batteries using recurrent neural networks. IEEE Trans. Veh. Technol. 2017, 66, 8773–8783. [Google Scholar] [CrossRef]
- Lin, C.; Mu, H.; Xiong, R.; Shen, W. A novel multi-model probability battery state of charge estimation approach for electric vehicles using h-infinity algorithm. Appl. Energy 2016, 166, 76–83. [Google Scholar] [CrossRef]
- Zheng, Y.; Ouyang, M.; Han, X.; Lu, L.; Li, J. Investigating the error sources of the online state of charge estimation methods for lithium-ion batteries in electric vehicles. J. Power Sources 2018, 377, 161–188. [Google Scholar] [CrossRef]
- Einhorn, M.; Conte, F.V.; Kral, C.; Fleig, J. A method for online capacity estimation of lithium ion battery cells using the state of charge and the transferred charge. IEEE Trans. Ind. Appl. 2011, 48, 736–741. [Google Scholar] [CrossRef]
- Li, Z.; Huang, J.; Liaw, B.; Zhang, J. On state-of-charge determination for lithium-ion batteries. J. Power Sources 2017, 348, 281–301. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.S.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Salkind, A.J.; Fennie, C.; Singh, P.; Atwater, T.; Reisner, D.E. Determination of state-of-charge and state-of-health of batteries by fuzzy logic methodology. J. Power Sources 1999, 80, 293–300. [Google Scholar] [CrossRef]
- Jin, G.; Li, L.; Xu, Y.; Hu, M.; Fu, C.; Qin, D. Comparison of SOC estimation between the integer-order model and fractional-order model under different operating conditions. Energies 2020, 13, 1785. [Google Scholar] [CrossRef]
- Gupta, D.; Richhariya, B.; Borah, P. A fuzzy twin support vector machine based on information entropy for class imbalance learning. Neural Comput. Appl. 2018, 31, 7153–7164. [Google Scholar] [CrossRef]
- Herzog, S.; Tetzlaff, C.; Wörgötter, F. Evolving artificial neural networks with feedback. Neural Networks 2020, 123, 153–162. [Google Scholar] [CrossRef] [PubMed]
- Lv, M.; Baldi, S.; Liu, Z. The non-smoothness problem in disturbance observer design: A set-invariance-based adaptive fuzzy control method. IEEE Trans. Fuzzy Syst. 2019, 27, 598–604. [Google Scholar] [CrossRef]
- Yang, Q.; Cao, B.; Li, X. A simplified fractional order impedance model and parameter identification method for lithium-ion batteries. PLoS ONE 2017, 12, e0172424. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Chen, Y.; Zhou, X.; Chen, H. Remaining useful life prediction of lithium-ion battery based on gauss–hermite particle filter. IEEE Trans. Control. Syst. Technol. 2019, 27, 1788–1795. [Google Scholar] [CrossRef]
- Li, R.; Jan, N.M.; Huang, B.; Prasad, V. Constrained multimodal ensemble Kalman filter based on Kullback–Leibler (KL) divergence. J. Process. Control. 2019, 79, 16–28. [Google Scholar] [CrossRef]
- Waag, W.; Fleischer, C.; Sauer, D.U. Critical review of the methods for monitoring of lithium-ion batteries in electric and hybrid vehicles. J. Power Sources 2014, 258, 321–339. [Google Scholar] [CrossRef]
- Sun, F.; Xiong, R.; He, H. A systematic state-of-charge estimation framework for multi-cell battery pack in electric vehicles using bias correction technique. Appl. Energy 2016, 162, 1399–1409. [Google Scholar] [CrossRef]
- Wang, T.; Chen, S.; Ren, H.; Zhao, Y. Model-based unscented Kalman filter observer design for lithium-ion battery state of charge estimation. Int. J. Energy Res. 2017, 42, 1603–1614. [Google Scholar] [CrossRef]
- Cui, X.; He, Z.; Li, E.; Cheng, A.; Luo, M.; Guo, Y. State-of-charge estimation of power lithium-ion batteries based on an embedded micro control unit using a square root cubature Kalman filter at various ambient temperatures. Int. J. Energy Res. 2019, 43, 3561–3577. [Google Scholar] [CrossRef]
- Xiong, B.; Zhao, J.; Wei, Z.; Skyllas-Kazacos, M. Extended Kalman filter method for state of charge estimation of vanadium redox flow battery using thermal-dependent electrical model. J. Power Sources 2014, 262, 50–61. [Google Scholar] [CrossRef]
- Shen, P.; Ouyang, M.; Lu, L.; Li, J.; Feng, X. The co-estimation of state of charge, state of health, and state of function for lithium-ion batteries in electric vehicles. IEEE Trans. Veh. Technol. 2018, 67, 92–103. [Google Scholar] [CrossRef]
- Wang, L.; Lu, N.; Liu, Q.; Liu, L.; Zhao, X. State of charge estimation for lifepo4 battery via dual extended kalman filter and charging voltage curve. Electrochim. Acta 2019, 296, 1009–1017. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of lipb-based hev battery packs part 1. background. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Plett, G.L. Sigma-point Kalman filtering for battery management systems of lipb-based hev battery packs. J. Power Sources 2006, 161, 1356–1368. [Google Scholar] [CrossRef]
- Sun, F.; Xiong, R. A novel dual-scale cell state-of-charge estimation approach for series-connected battery pack used in electric vehicles. J. Power Sources 2015, 274, 582–594. [Google Scholar] [CrossRef]
- Chen, N.; Zhang, P.; Dai, J.; Gui, W. Estimating the state-of-charge of lithium-ion battery using an h-infinity observer based on electrochemical impedance model. IEEE Access 2020, 8, 26872–26884. [Google Scholar] [CrossRef]
- Shu, X.; Li, G.; Shen, J.; Yan, W.; Chen, Z.; Liu, Y. An adaptive fusion estimation algorithm for state of charge of lithium-ion batteries considering wide operating temperature and degradation. J. Power Sources 2020, 462, 228132. [Google Scholar] [CrossRef]
- Gong, X.; Suh, J.; Lin, C. A novel method for identifying inertial parameters of electric vehicles based on the dual h infinity filter. Veh. Syst. Dyn. 2019, 58, 28–48. [Google Scholar] [CrossRef]
- Xiong, W.; Mo, Y.; Yan, C. Lithium-ion battery parameters and state of charge joint estimation using bias compensation least squares and the alternate algorithm. Math. Probl. Eng. 2020, 2020, 1–16. [Google Scholar] [CrossRef]
- Xu, W.; Xu, J.; Lang, J.; Yan, X. A multi-timescale estimator for lithium-ion battery state of charge and state of energy estimation using dual h infinity filter. IEEE Access 2019, 7, 181229–181241. [Google Scholar] [CrossRef]
- Zhang, Q.; Shang, Y.; Li, Y.; Cui, N.; Duan, B.; Zhang, C. A novel fractional variable-order equivalent circuit model and parameter identification of electric vehicle li-ion batteries. ISA Trans. 2020, 97, 448–457. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; He, Y.-J.; Shen, J.-N.; Hu, X.; Ma, Z.-F. State of charge-dependent polynomial equivalent circuit modeling for electrochemical impedance spectroscopy of lithium-ion batteries. IEEE Trans. Power Electron. 2017, 33, 8449–8460. [Google Scholar] [CrossRef]
- Lin, X.; Perez, H.E.; Mohan, S.; Siegel, J.B.; Stefanopoulou, A.G.; Ding, Y.; Castanier, M.P. A lumped-parameter electro-thermal model for cylindrical batteries. J. Power Sources 2014, 257, 1–11. [Google Scholar] [CrossRef]
- Xu, Z.; Gao, S.; Yang, S. Lifepo4 battery state of charge estimation based on the improved thevenin equivalent circuit model and Kalman filtering. J. Renew. Sustain. Energy 2016, 8, 24103. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nominal Capacity (Ah) | Nominal Voltage (V) | Charging Cut-Off Voltage (V) | Discharge Cut-Off Voltage (V) | Charging Cut-Off Current (A) |
|---|---|---|---|---|
| 28 | 3.7 | 4.2 | 2.5 | 1.25 |
| R0 | R1 | C1 | R2 | C2 | W | A | β | γ |
|---|---|---|---|---|---|---|---|---|
| 0.003 | 0.0001 | 960 | 7.12 | 1112 | 500 | 0.61 | 0.13 | 0.64 |
| R0 | R1 | C1 | R2 | C2 | W | α | β | γ |
|---|---|---|---|---|---|---|---|---|
| 0.001 | 0.05 | 5431 | 5.31 | 4758 | 2122 | 0.59 | 0.22 | 0.12 |
| RMSE | HPPC | DST | FUDS |
|---|---|---|---|
| PSO | 0.0061 | 0.0050 | 0.0057 |
| HPSO | 0.0036 | 0.0022 | 0.0035 |
| The Specific Calculation Process Is as Follows: |
|---|
| Building a nonlinear system: Initialization: When , calculation First step: prediction stage System status estimation: Error covariance prediction: Second step: update stage Innovation matrix: Gain matrix: System state correction: Error covariance correction: |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Hu, M.; Xu, Y.; Fu, C.; Jin, G.; Li, Z. State of Charge Estimation for Lithium-Ion Power Battery Based on H-Infinity Filter Algorithm. Appl. Sci. 2020, 10, 6371. https://doi.org/10.3390/app10186371
Li L, Hu M, Xu Y, Fu C, Jin G, Li Z. State of Charge Estimation for Lithium-Ion Power Battery Based on H-Infinity Filter Algorithm. Applied Sciences. 2020; 10(18):6371. https://doi.org/10.3390/app10186371
Chicago/Turabian StyleLi, Lan, Minghui Hu, Yidan Xu, Chunyun Fu, Guoqing Jin, and Zonghua Li. 2020. "State of Charge Estimation for Lithium-Ion Power Battery Based on H-Infinity Filter Algorithm" Applied Sciences 10, no. 18: 6371. https://doi.org/10.3390/app10186371
APA StyleLi, L., Hu, M., Xu, Y., Fu, C., Jin, G., & Li, Z. (2020). State of Charge Estimation for Lithium-Ion Power Battery Based on H-Infinity Filter Algorithm. Applied Sciences, 10(18), 6371. https://doi.org/10.3390/app10186371