Development of Multi-DOF Model of Automotive LED Headlamp Assembly for Force Transmission Prediction Using MATLAB GUI

Abstract
:1. Introduction
2. Proposed Method
3. Vibration Analysis
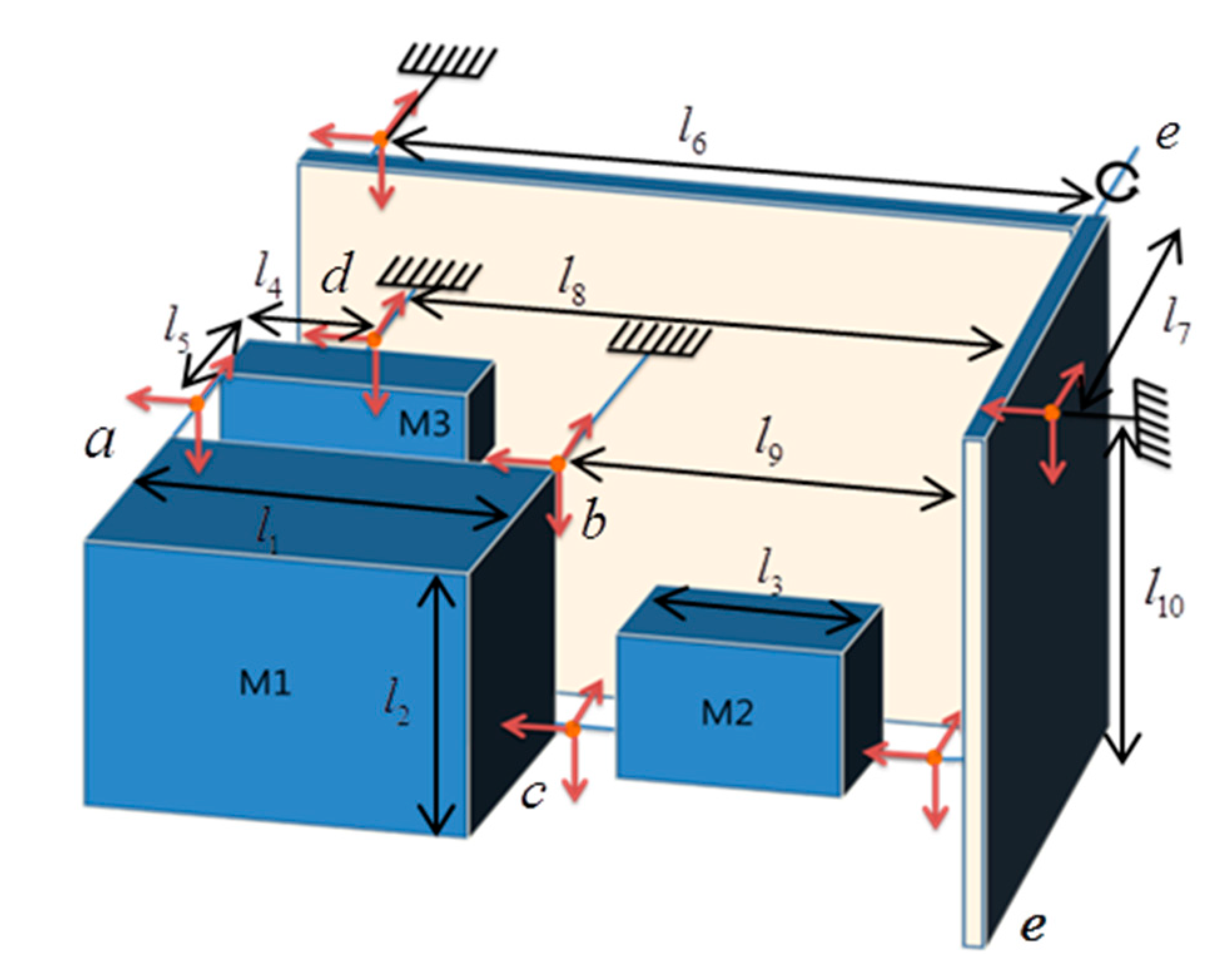
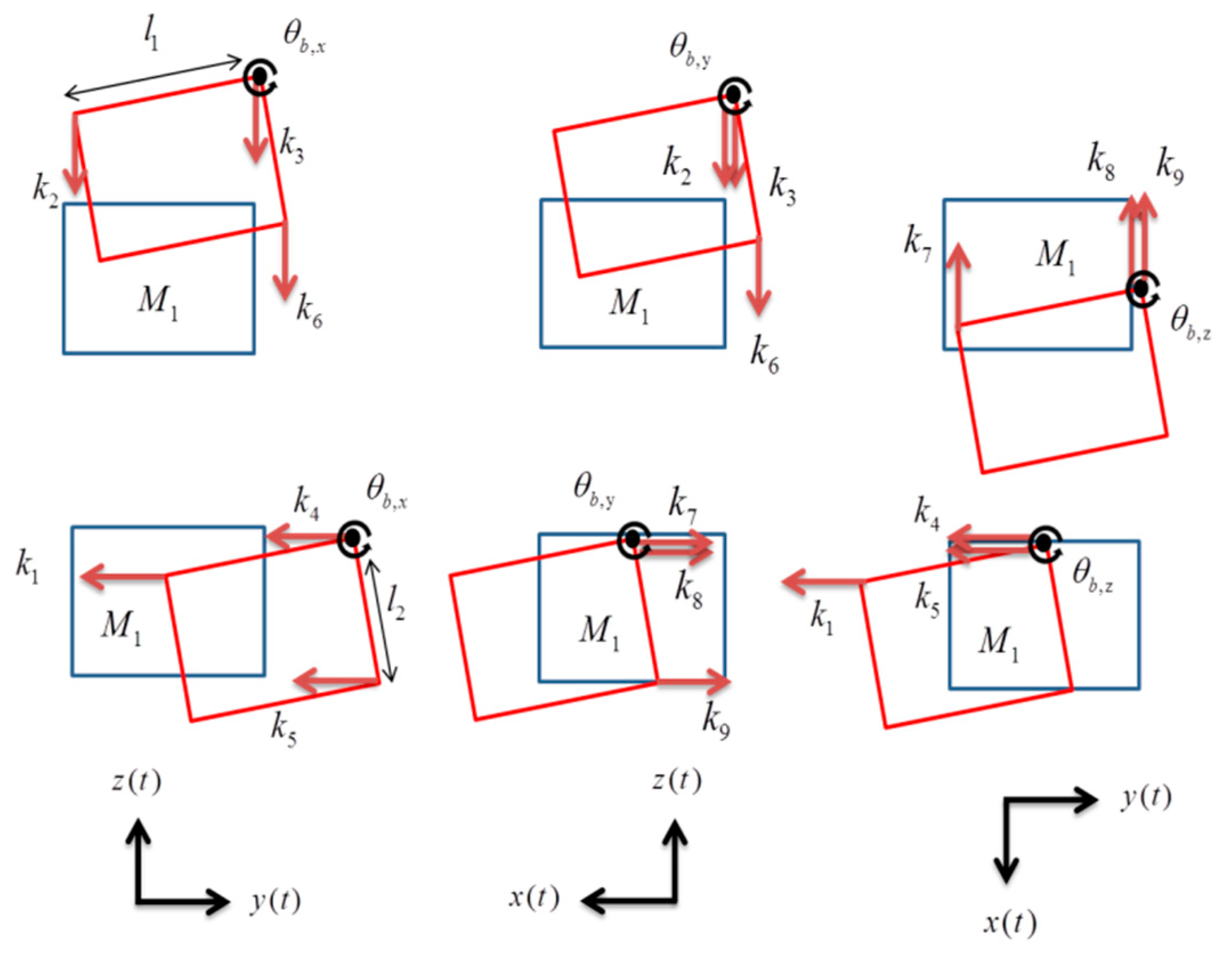
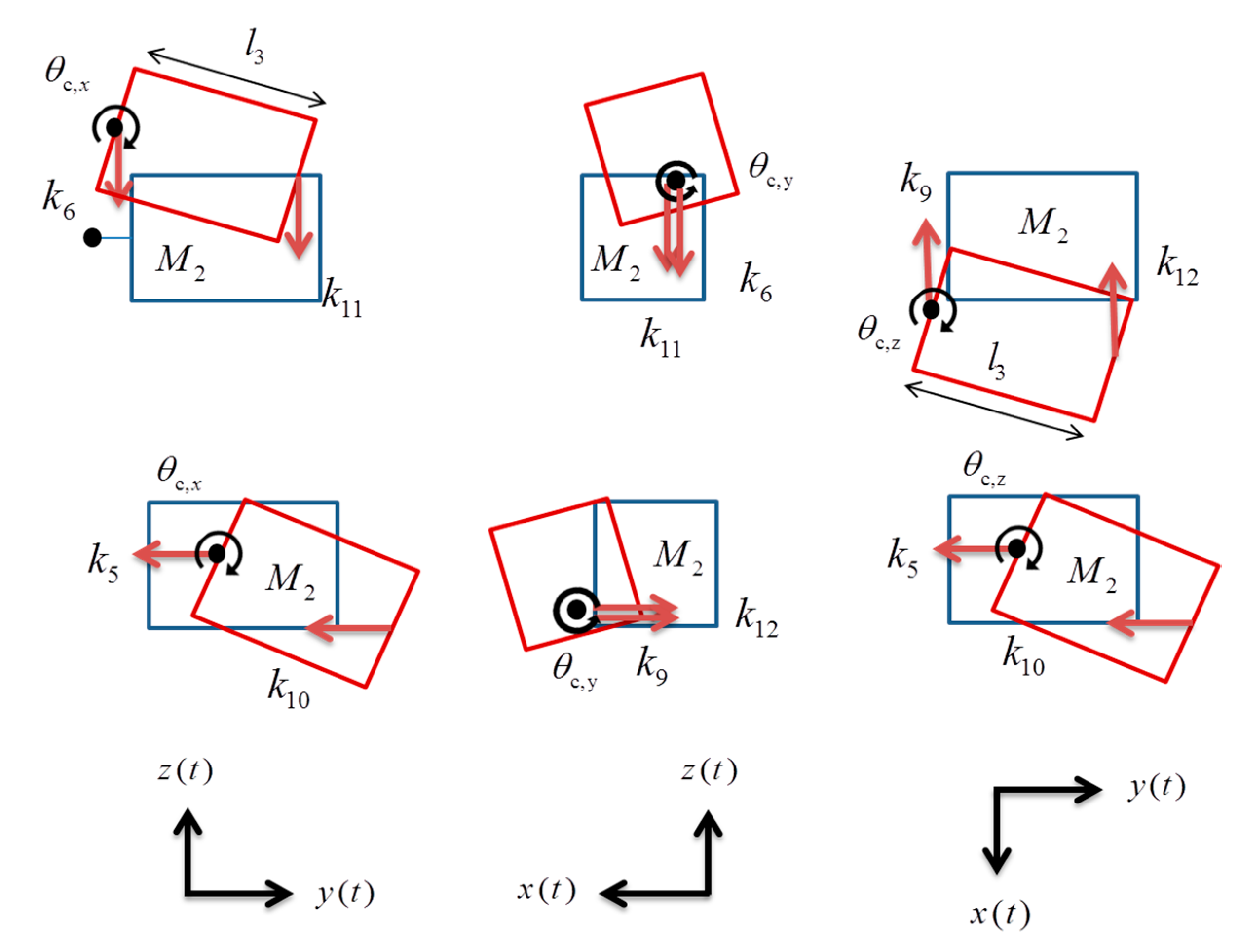
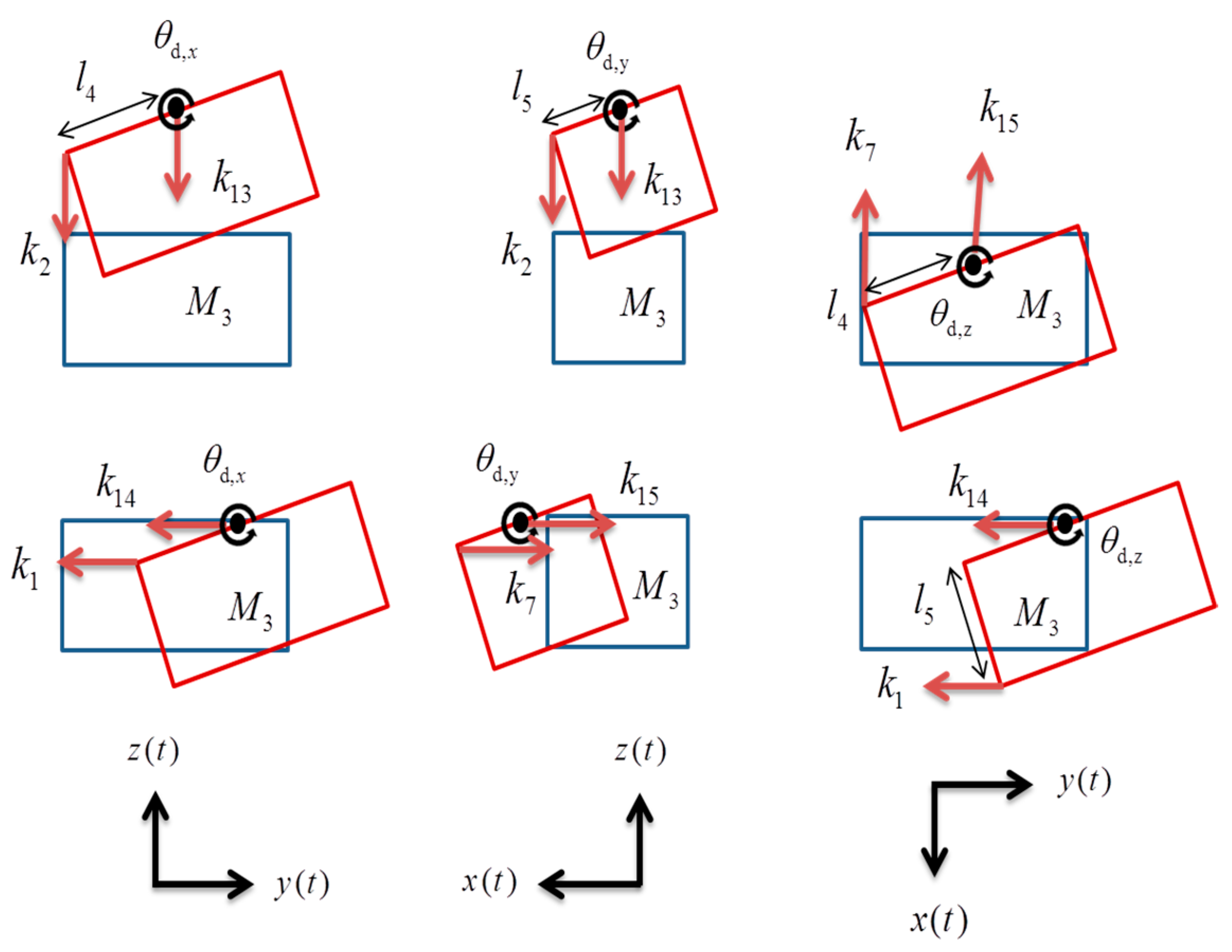
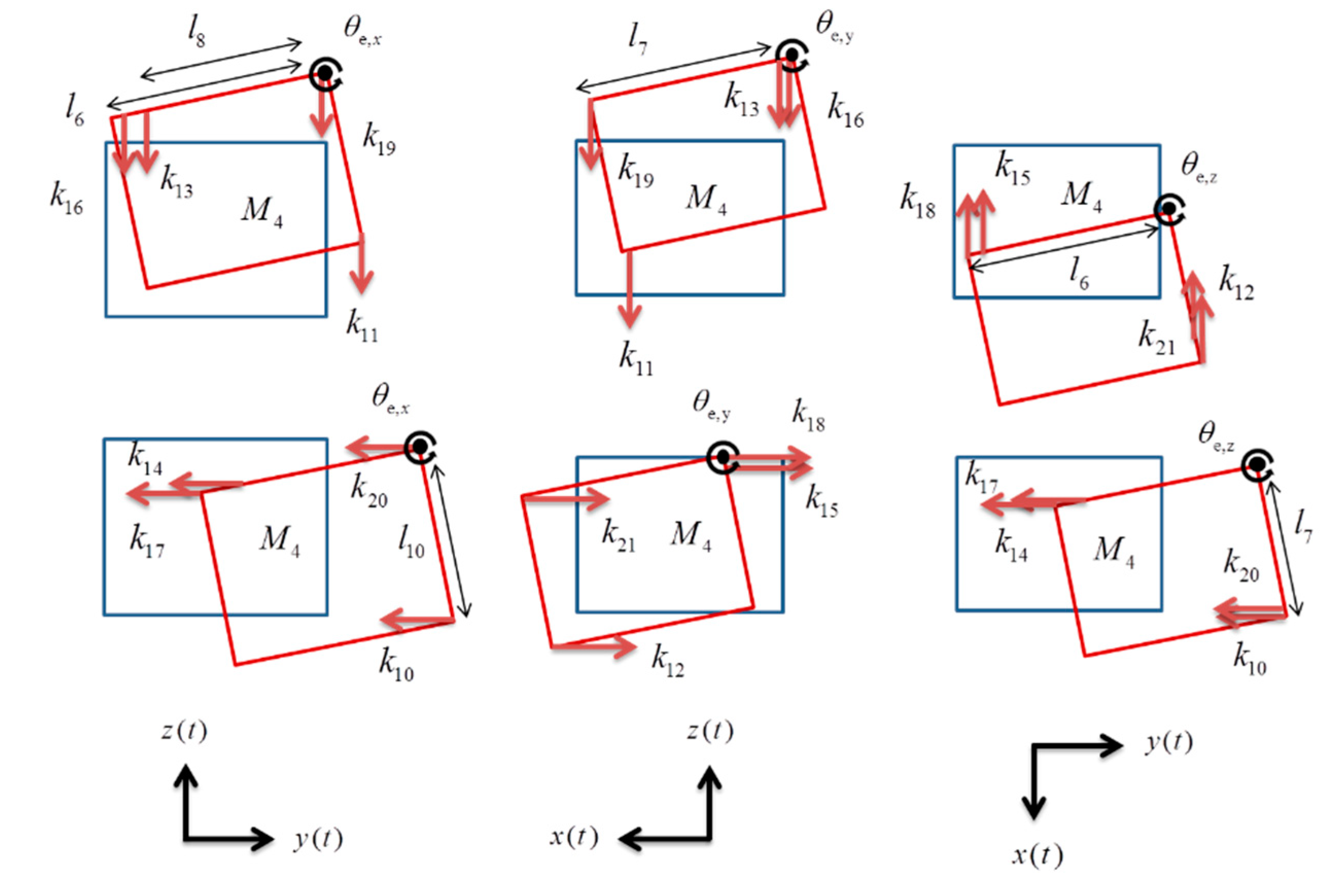
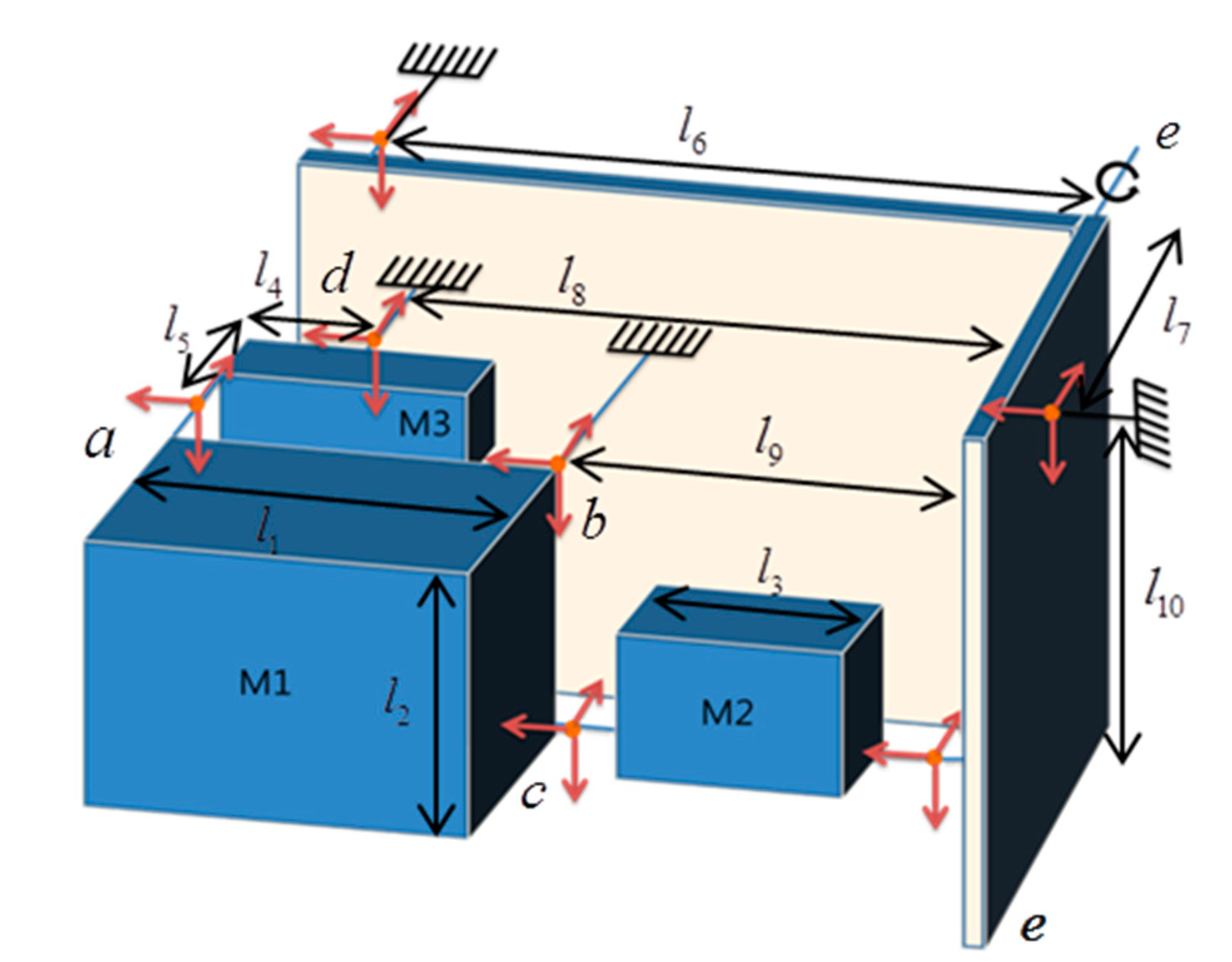
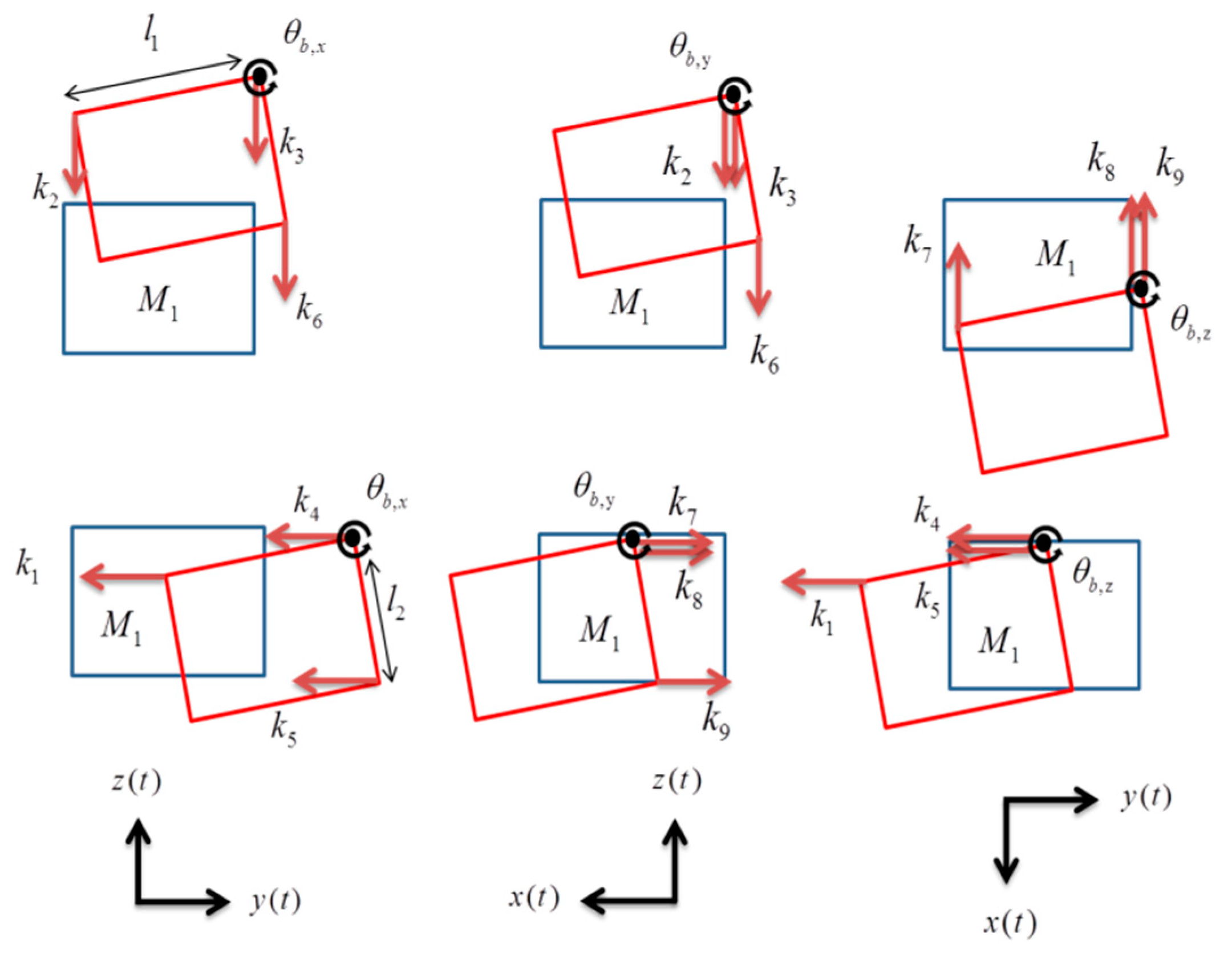
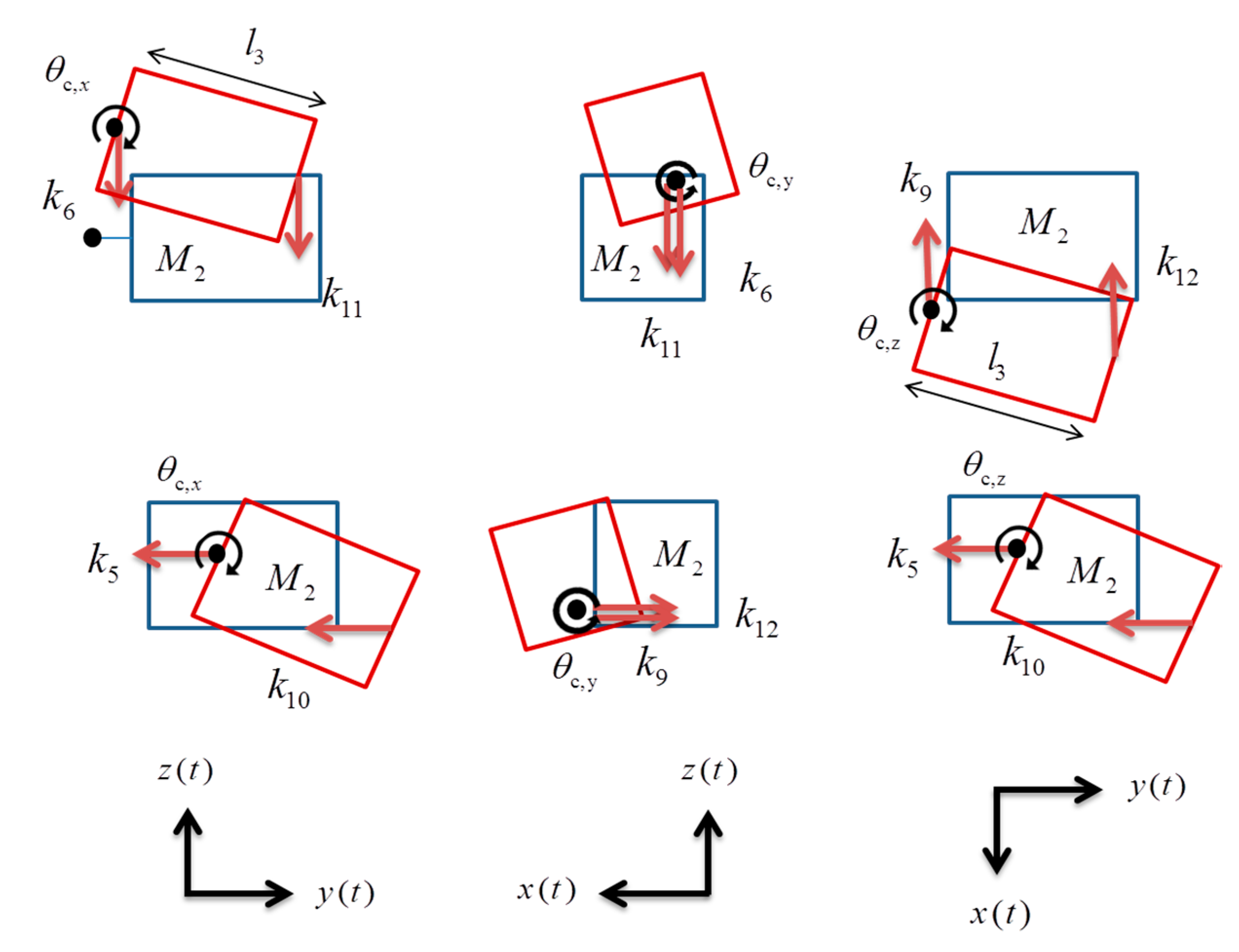
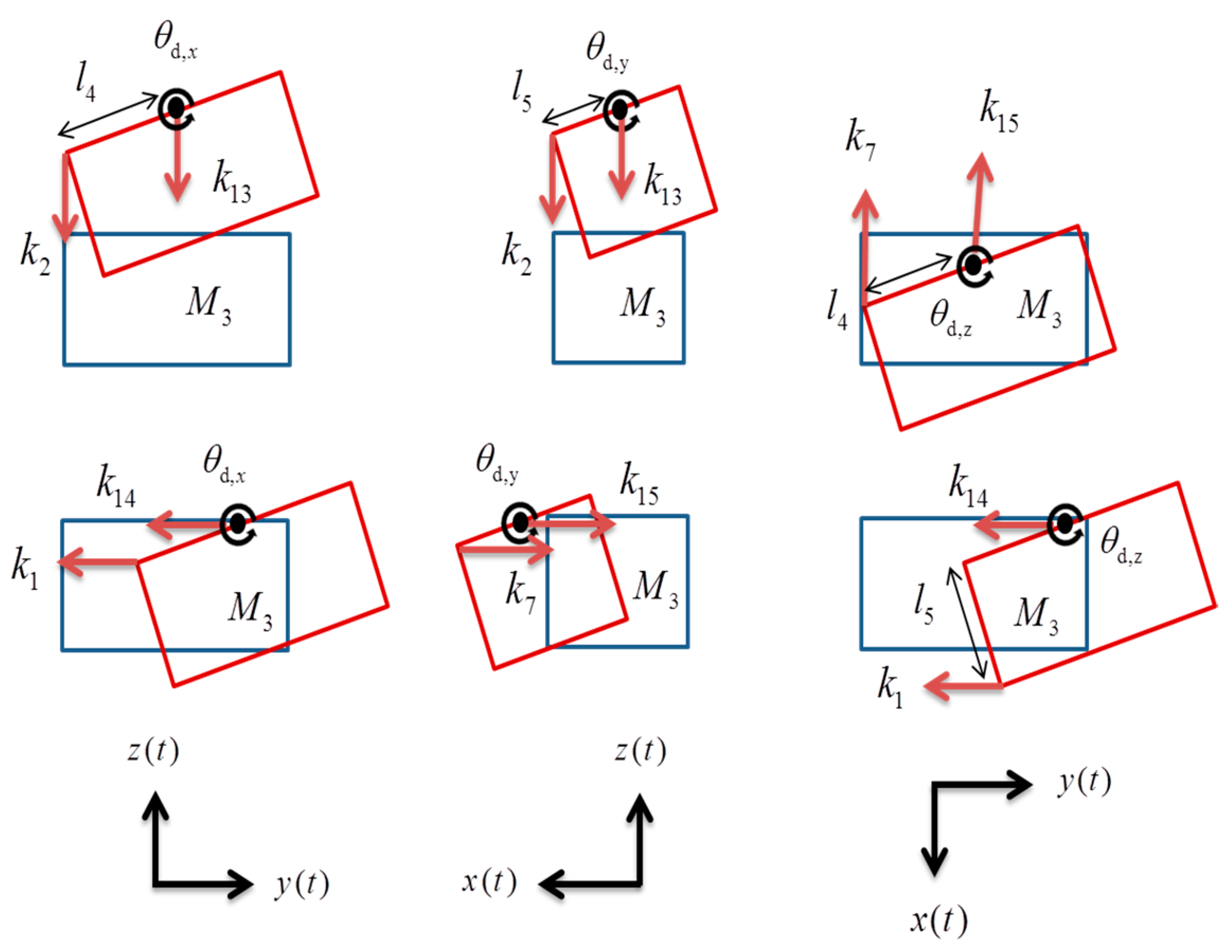
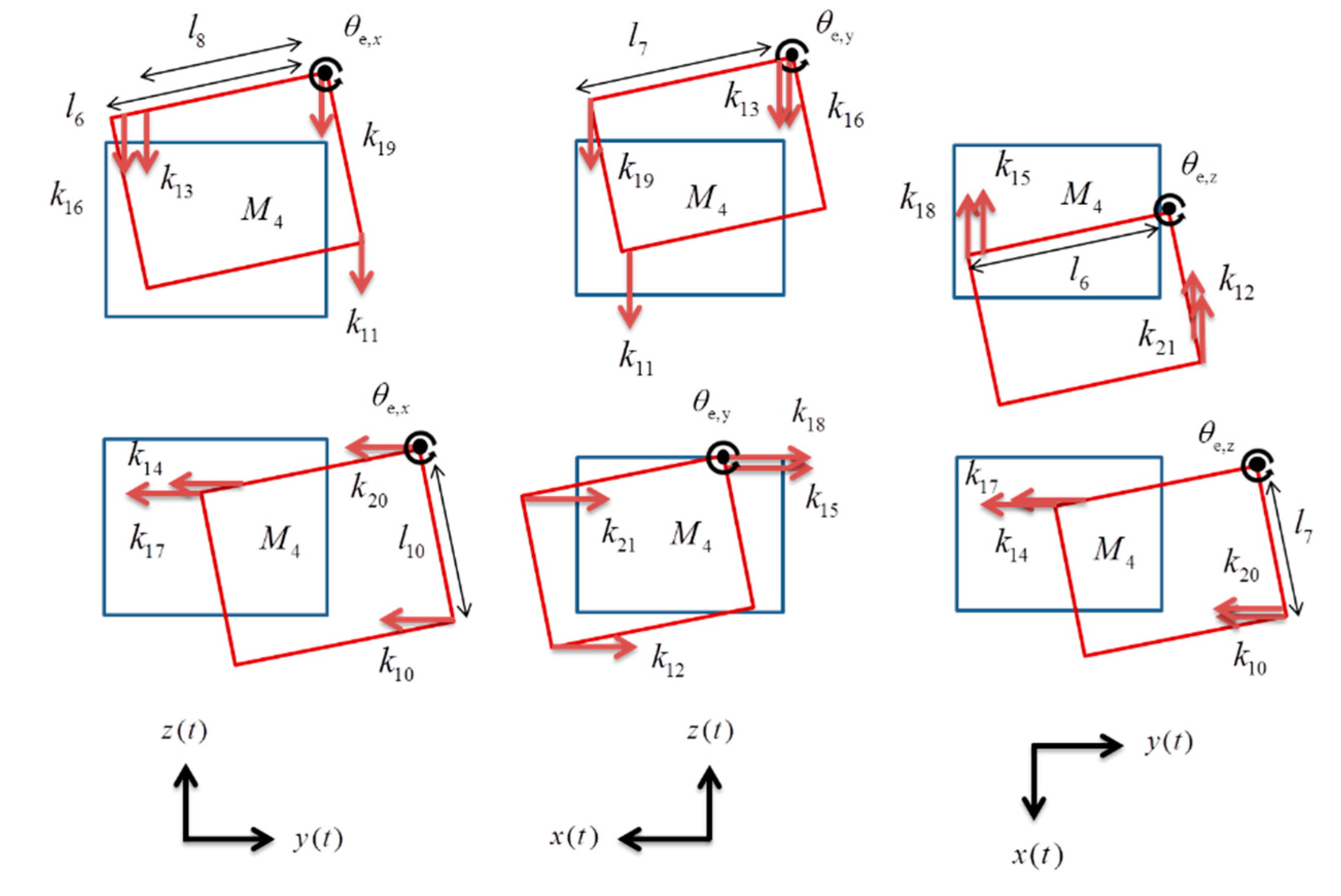
3.1. Mathematical Modeling and Derivation of Equations
3.1.1. Forcing Conditions
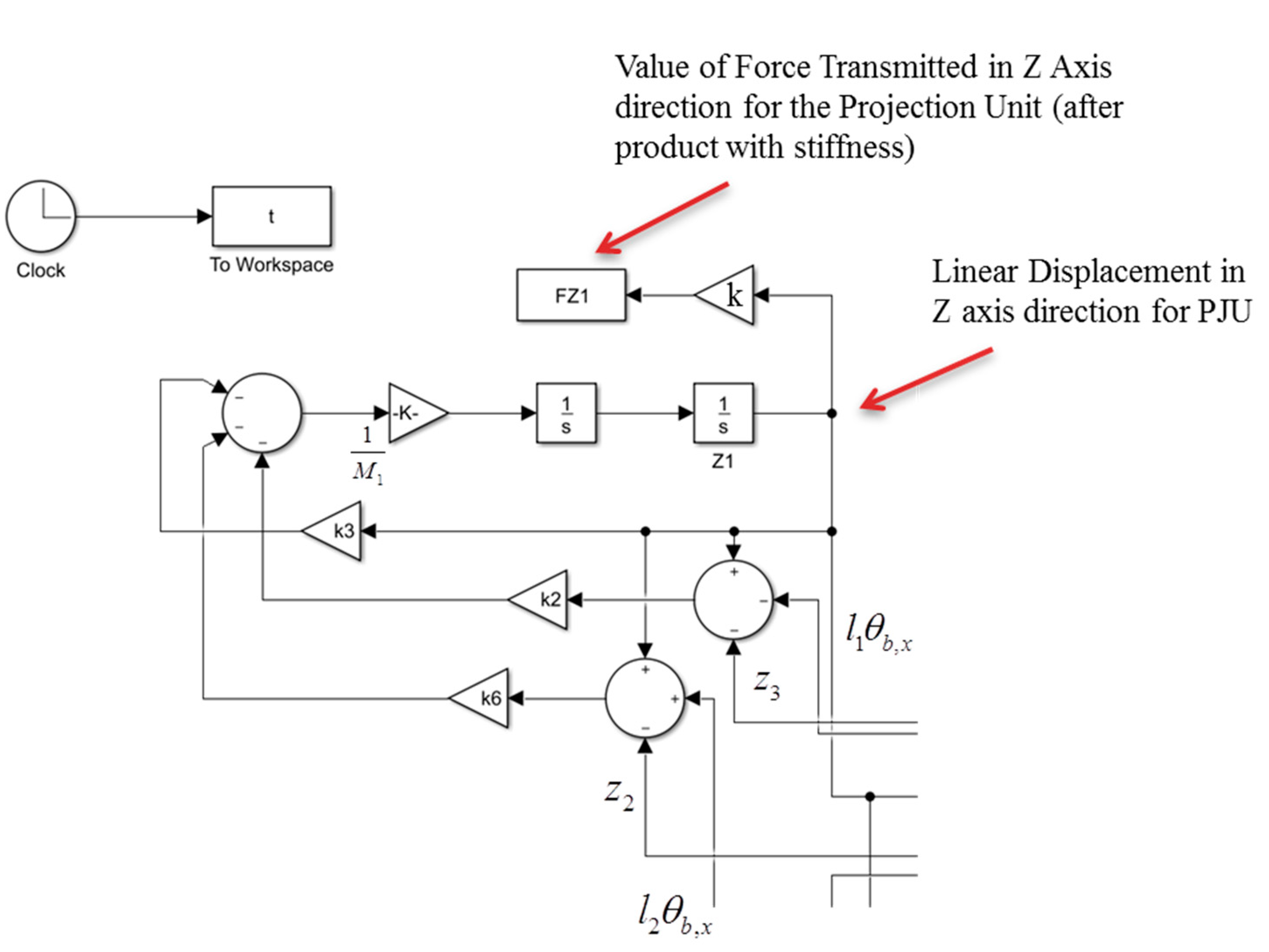
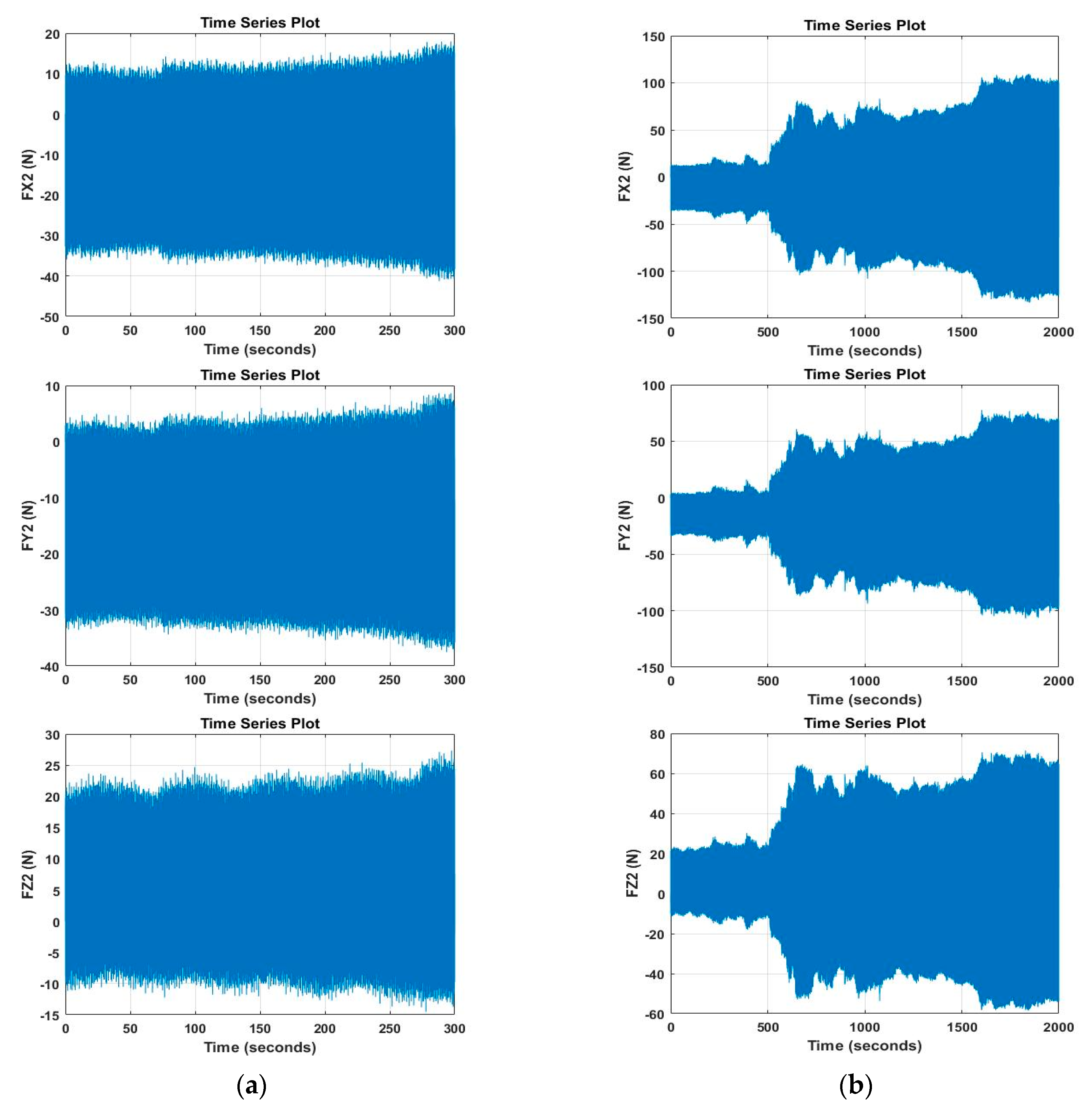
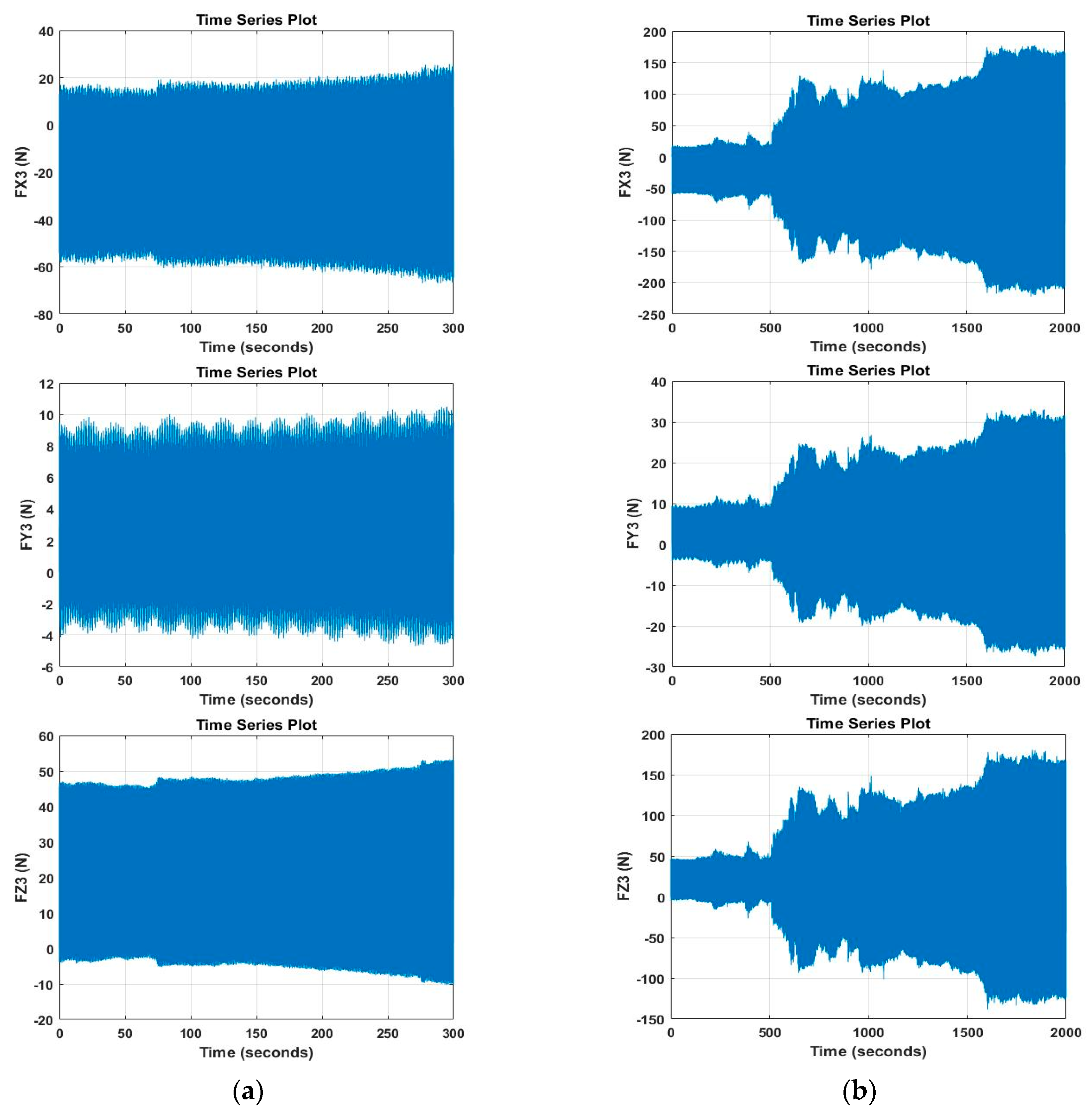
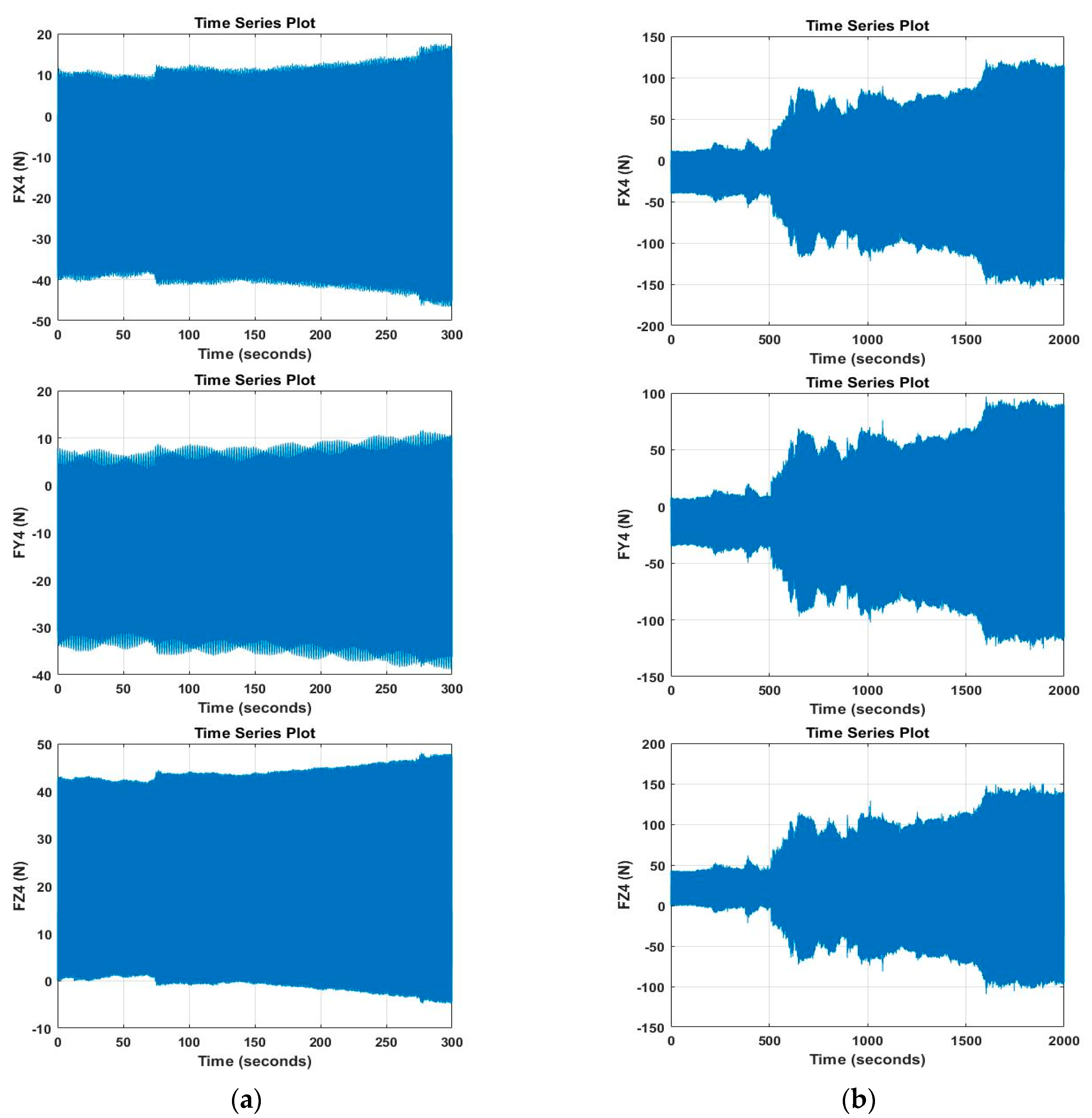
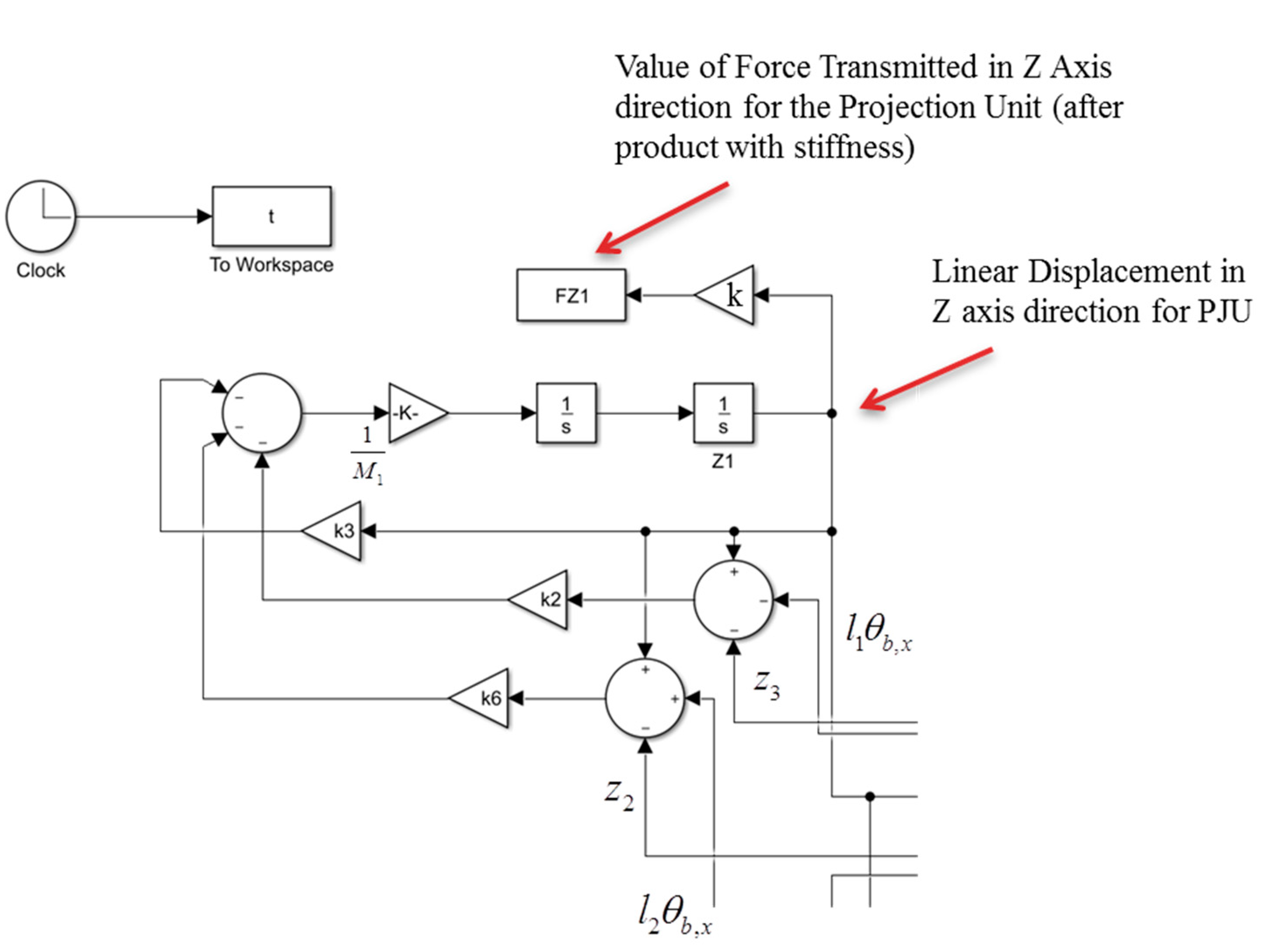
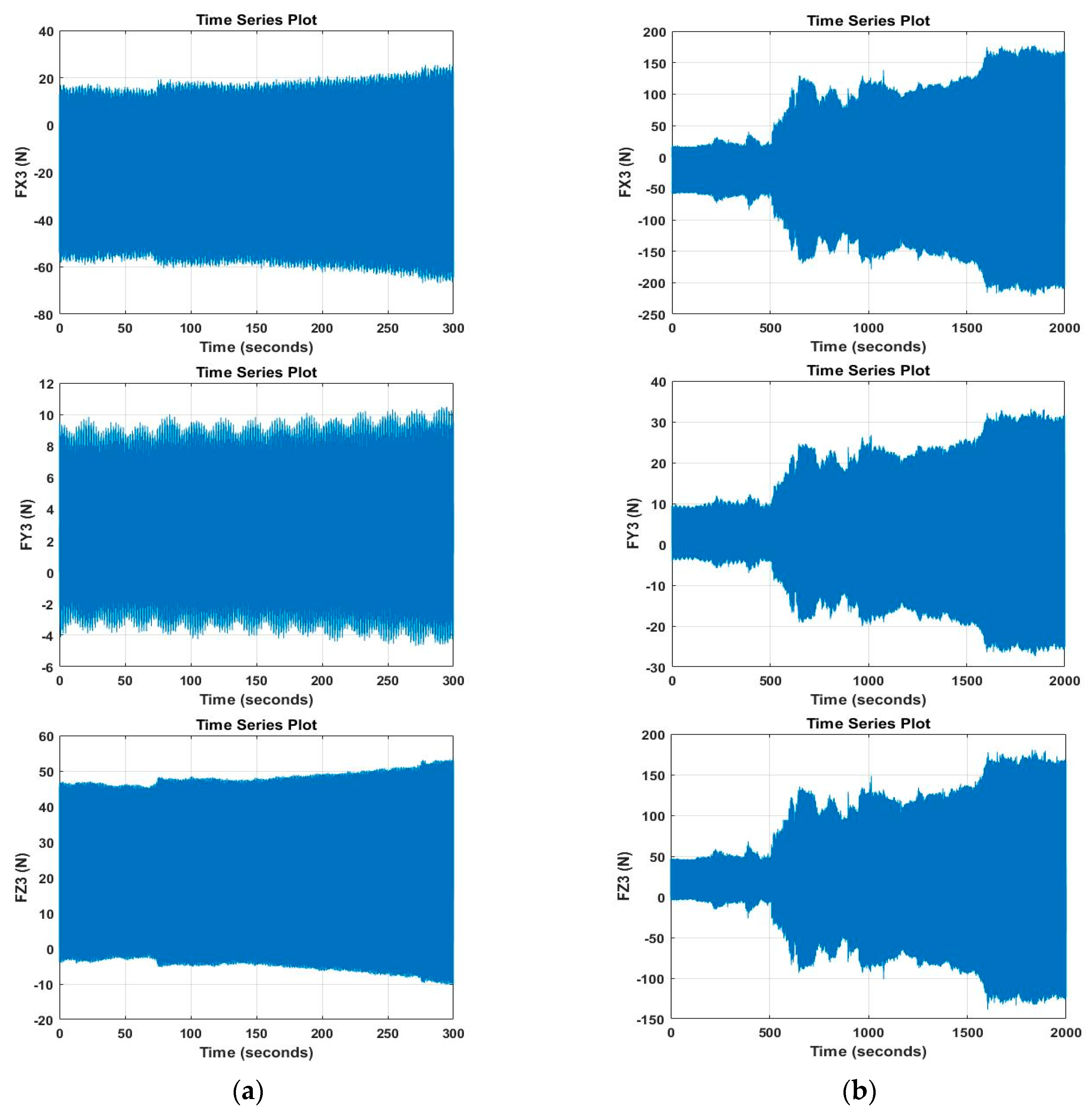
3.1.2. Force Transmission
3.2. Solution of Equations
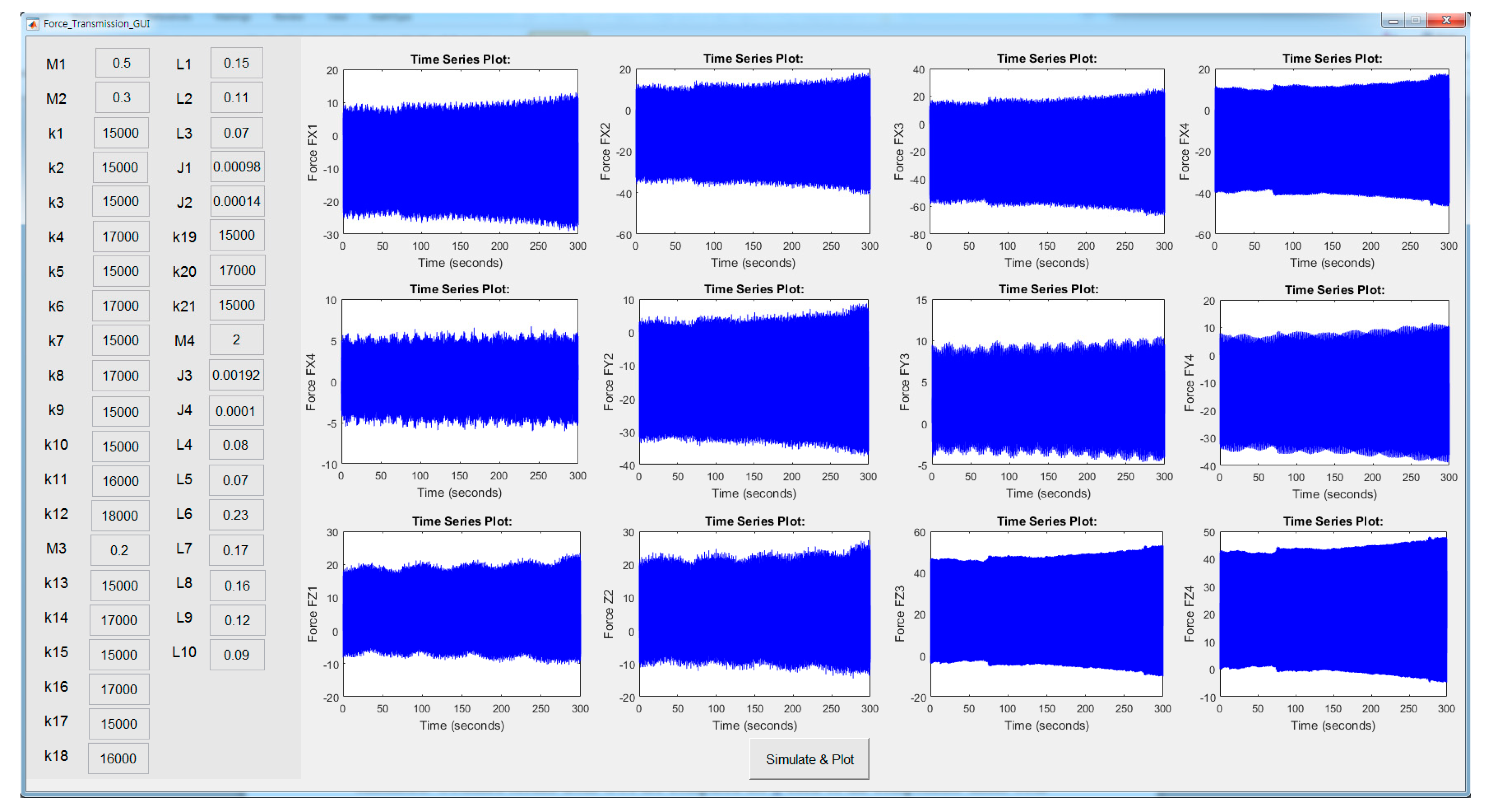
Developing the GUI
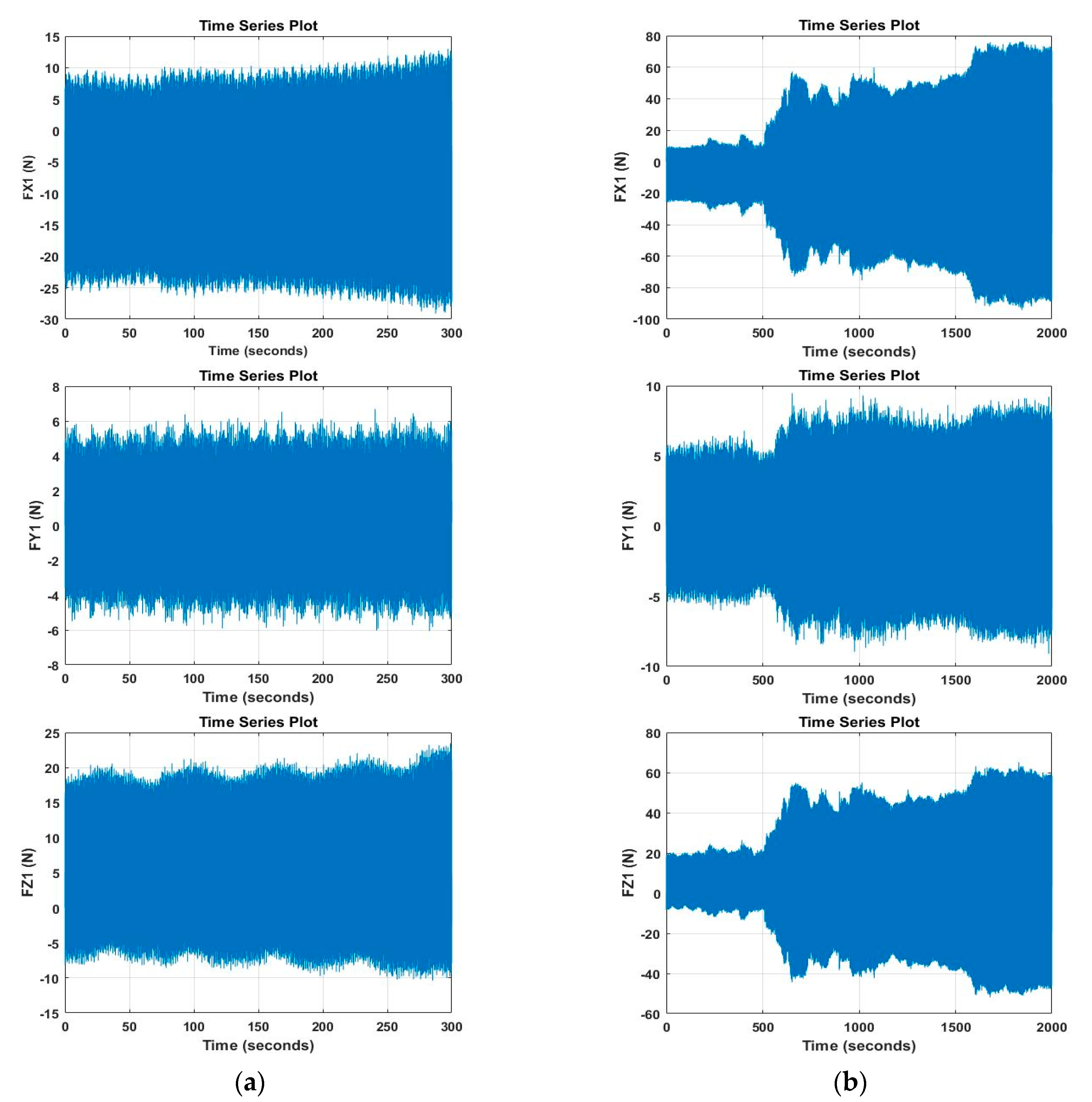
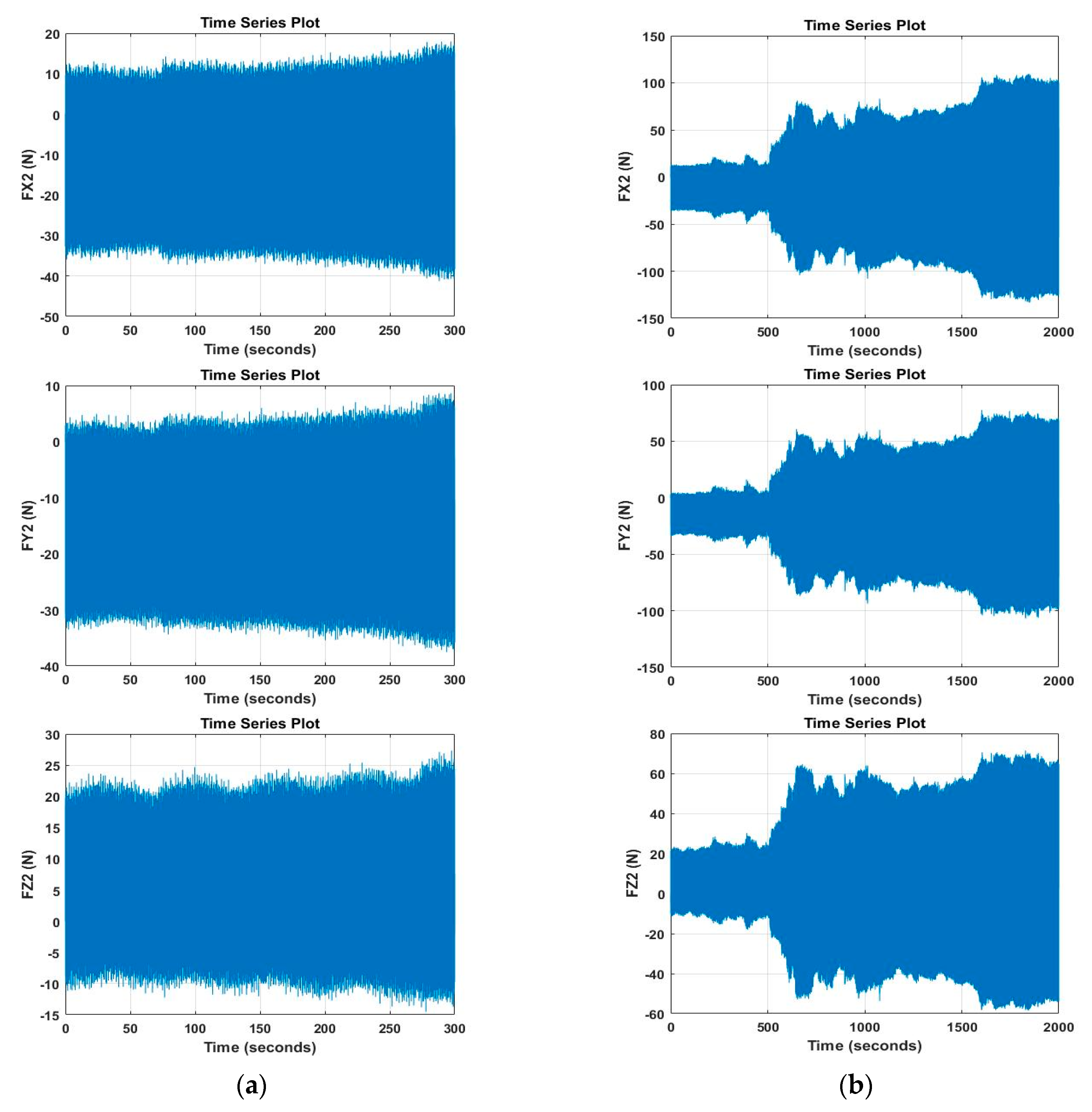
4. GUI Results
Projection Unit
5. Conclusions and Future Plans
- 1.
- A new concept for the multi-DOF modeling of an automotive LED headlamp assembly was introduced. This type of study on vibration and dynamics has not been performed on an LED headlamp; thus, a vibration model for the headlamp module was proposed to simulate the system under the desired boundary conditions. Using LEDs in automotive lighting is an emerging concept that requires additional validation and standardization studies;
- 2.
- The proposed methodology provides an understanding of the dynamics of each component of the system. In the present work, an effort has been made to determine the dynamics of the LED headlamp module to determine whether the system can withstand the forcing conditions applied by the vehicle moving across an uneven road to ensure the reliability of the equipment. Linear and angular displacements of the components of the headlamp were determined using Newton’s second law, and then the force transmitted through each body was calculated using MATLAB;
- 3.
- A 3D model of the system was developed. Each mass component was considered as a cube with realistic parameters, the same as the actual device. There were four main components considered in the system: projection unit, aiming unit, bracket unit, and outer housing. The motion of each component was considered in three dimensions including a rotation point for each. A vibration model with 23 DOFs was developed, and a system of equations of motion was obtained. These equations were solved in Simulink, and the linear and angular displacements were calculated using a GUI application in MATLAB;
- 4.
- The GUI was developed to simulate the system under several conditions. The GUI provides a user-friendly interface that can be used to solve the model with just one click. Even a basic knowledge of MATLAB is sufficient to obtain results. Simulink was linked with the GUIDE application of MATLAB to obtain a UI environment. Parameters such as stiffness, length, and mass were included in this application, which can be altered to observe the behavior of the system;
- 5.
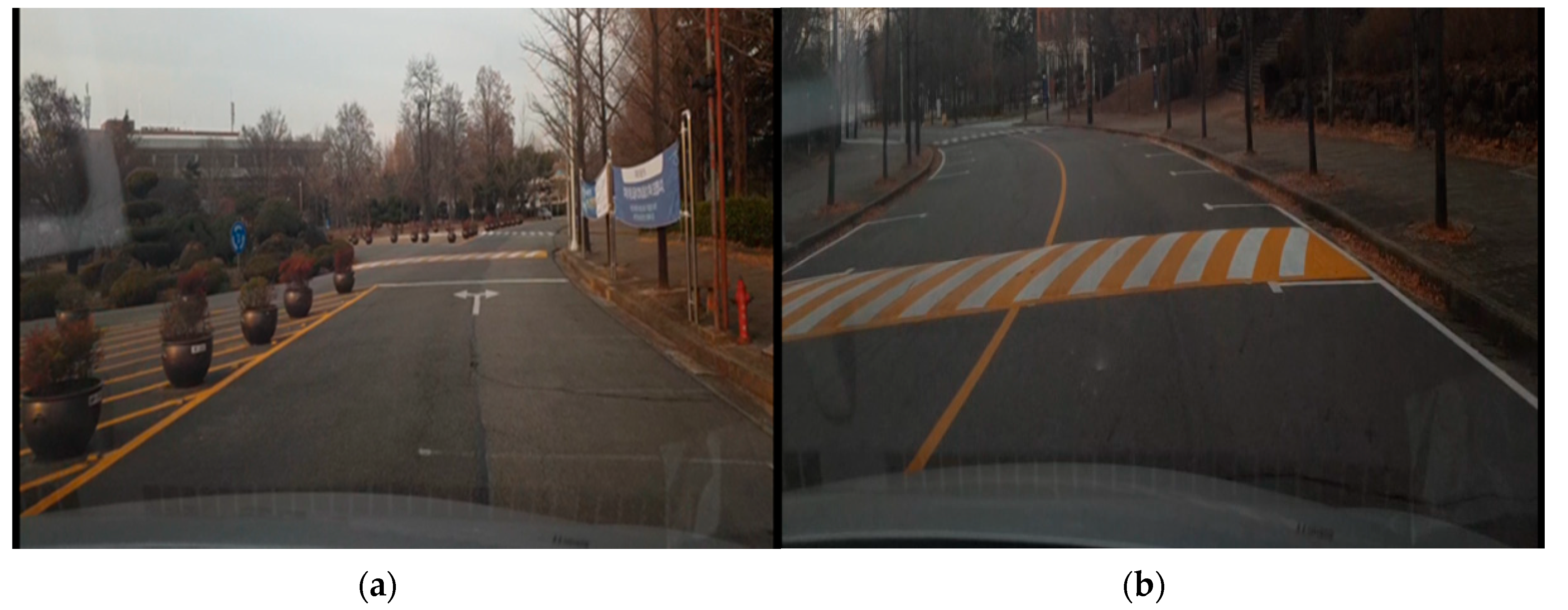
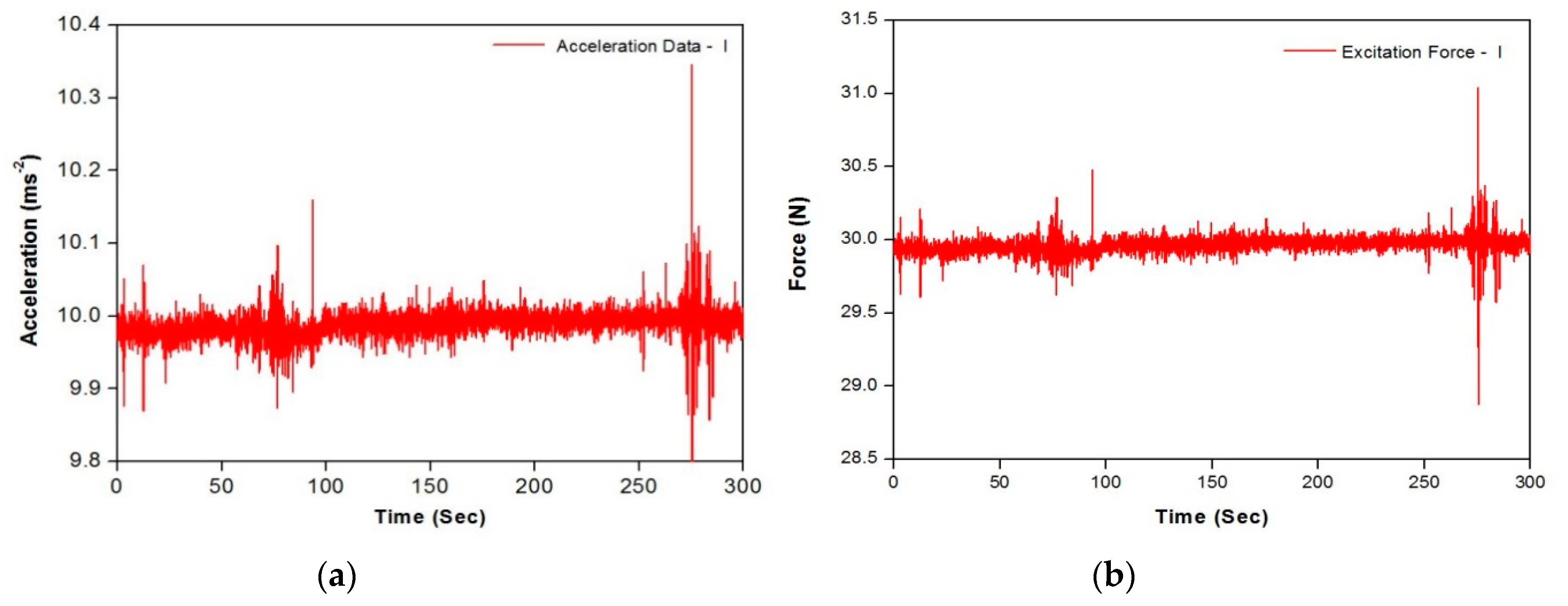
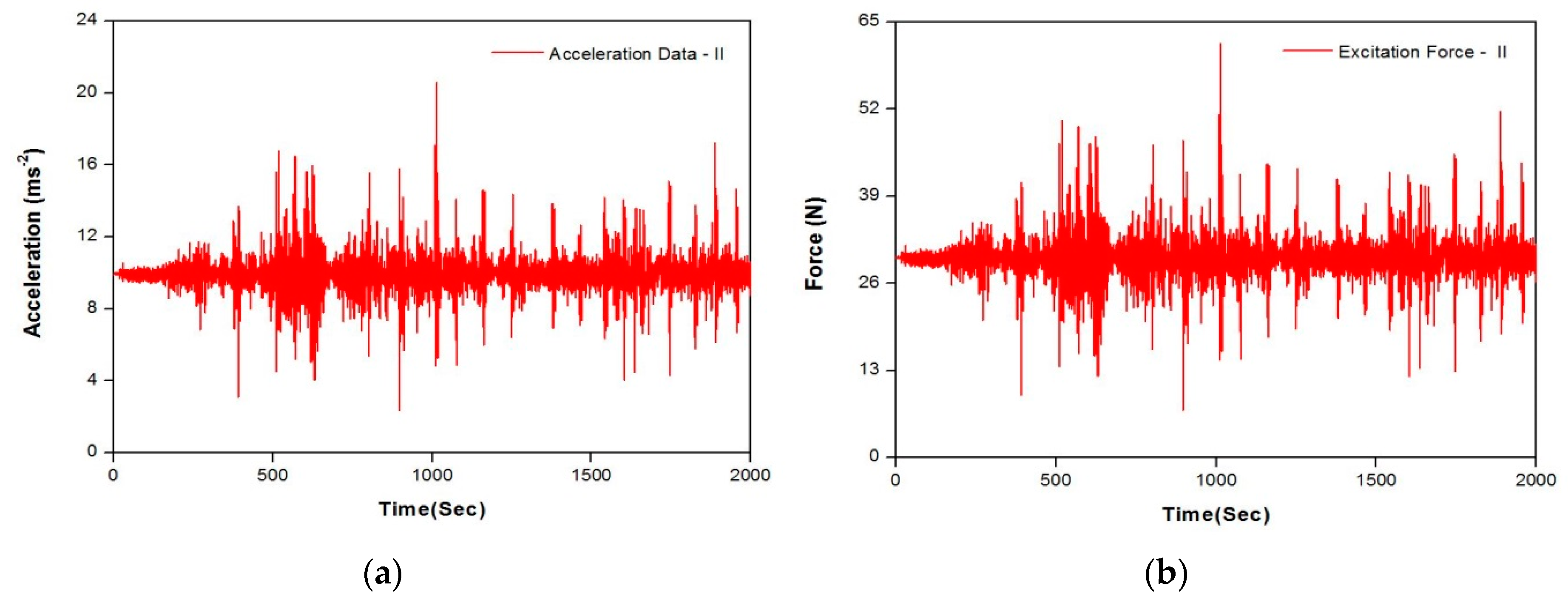
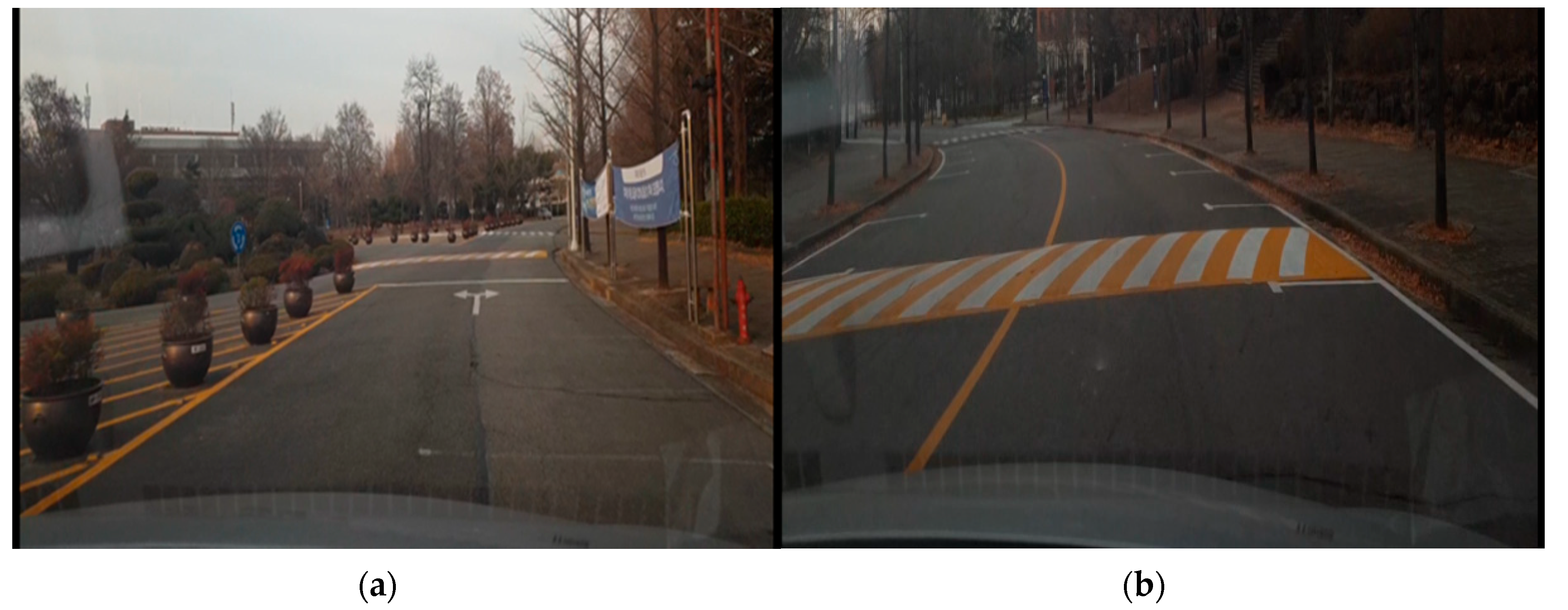
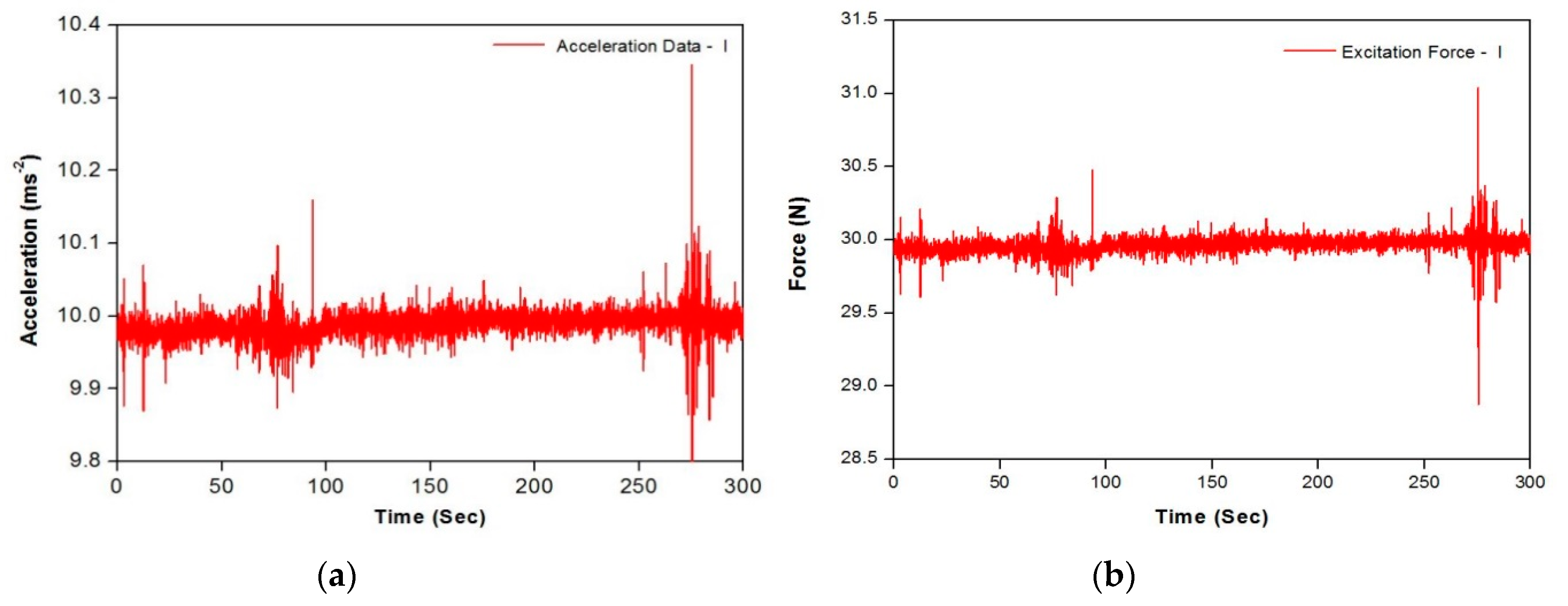
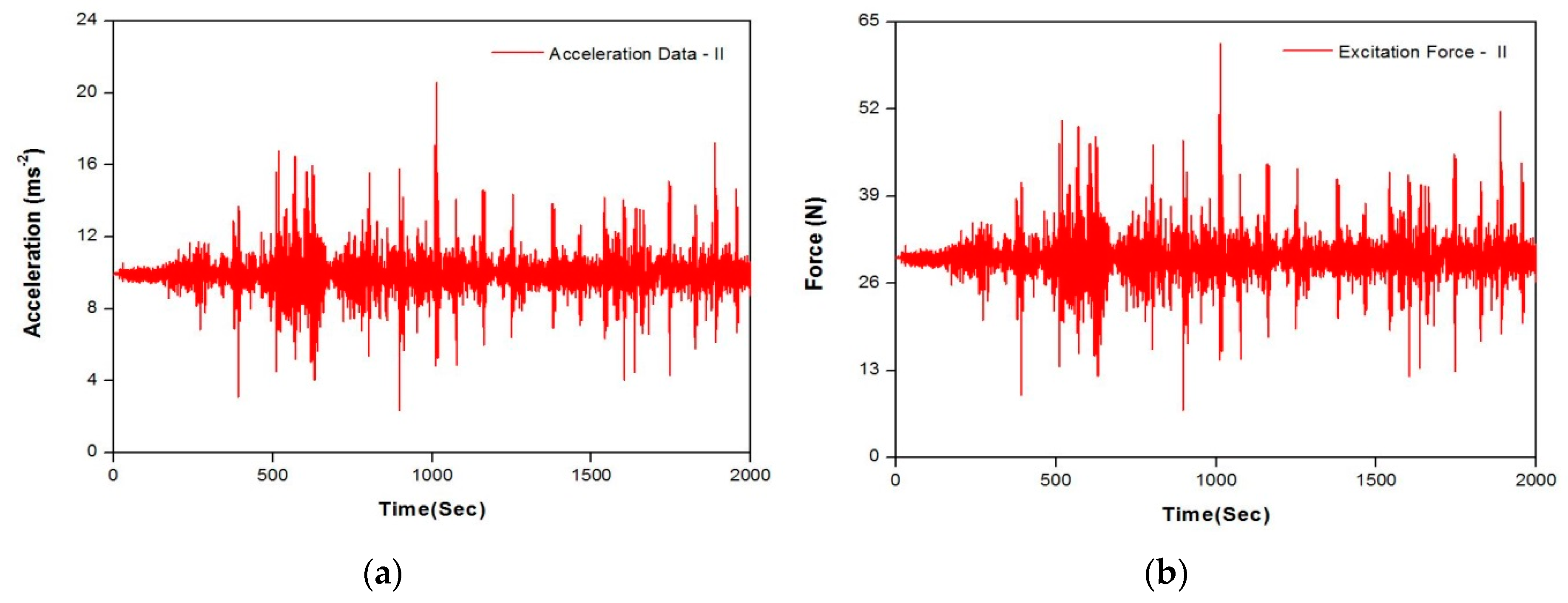
- An experiment was conducted to apply the forcing conditions that actually occur in an automobile chassis. The acceleration data in each axis was obtained using an accelerometer mounted on the vehicle. Applying this data to the developed model provided the fluctuations of the system that occur on the road. Then, the forces transmitted from the automobile chassis to the headlamp components were compared for the two cases of automobile movement. In addition, using the real data from road provided approximately the real road conditions to the simulation; hence, extensive experimental work could be avoided, and authentic anticipation of results can be achieved
Author Contributions
Funding
Conflicts of Interest
References
- Dewar, R.; Olson, P. Human Factors in Traffic Safety, 2nd ed.; Lawyers & Judges Publishing Company: Tucson, AZ, USA, 2007. [Google Scholar]
- Bullough, J.; Donnell, E.; Rea, M.S. To illuminate or not to illuminate: Roadway lighting as it affects traffic safety at intersections. Accid. Anal. Prev. 2013, 53, 65–77. [Google Scholar] [CrossRef] [PubMed]
- Kim, D. Study of Optimized Tuning in Full AFLS Head Lamps. Lect. Notes Electr. Eng. 2012, 196, 1719–1731. [Google Scholar]
- Moiseev, M.A.; Doskolovich, L.L.; Kazanskiy, N.L. Design of high-efficient freeform LED lens for illumination of elongated rectangular regions. Opt. Express 2011, 19, A225–A233. [Google Scholar] [CrossRef] [PubMed]
- Aslanov, E.R.; Doskolovich, L.L.; Moiseev, M.A.; Bezus, E.A.; Kazanskiy, N.L. Design of an optical element forming an axial line segment for efficient LED lighting systems. Opt. Express 2013, 21, 28651–28656. [Google Scholar] [CrossRef]
- Kazanskiy, N.L.; Skidanov, R. Binary beam splitter. Appl. Opt. 2012, 51, 2672. [Google Scholar] [CrossRef]
- Doskolovich, L.L.; Dmitriev, A.Y.; Moiseev, M.A.; Kazanskiy, N.L. Analytical design of refractive optical elements generating one-parameter intensity distributions. J. Opt. Soc. Am. A 2014, 31, 2538–2544. [Google Scholar] [CrossRef] [PubMed]
- Abulkhanov, S.R.; Gorjainov, D.S.; Skuratov, D.L. Optimization of strength characteristics of aircraft lighting devices by building their virtual models. Bull. Samara State Aerosp. Univ. 2012, 5, 72–78. [Google Scholar]
- Kharche, S.; Karajagi, P.; Kulkarni, R.; Siddhant College of Engineering. Design Development and Vibration Analysis of MCM300 Headlamp. Int. J. Eng. Trends Technol. 2016, 38, 168–175. [Google Scholar] [CrossRef]
- Dascotte, E. Applications of Finite Element Modal Updating Using Experimental Modal Data. Sound Vib. 1991, 25, 22–26. [Google Scholar]
- Performance requirements for motor vehicle headlamps, SAE J1383 Apr 8. Available online: https://law.resource.org/pub/us/cfr/ibr/005/sae.j1383.1985.html (accessed on 21 August 2020).
- United Nations Economic Commission for Europe, Regulations 101–120. Available online: https://www.unece.org/?id=39146 (accessed on 21 August 2020).
- United Nations Economic Commission for Europe, Regulations 121–140. Available online: https://www.unece.org/?id=39147 (accessed on 21 August 2020).
- Schrader, C.D.; Hilburger, F.K.N. Development and Correlation of Three Axes Random Vibration Simulation on Automotive Lighting. SAE Tech. Paper Ser. 2005 2005, 2005–01–1570. [Google Scholar] [CrossRef]
- Zhang, Y.; Usman, M. Life Prediction for Lighting Bulb Shield Designs Subjected to Random Vibration. SAE Tech. Paper Ser. 1999 1999, 1999–01–0705. [Google Scholar] [CrossRef]
- Roucoules, C.; Chemin, F.; Cros, C. FRF Prediction and Durability of Optical Module and Headlamp. Valeo Lighting Syst. 2010, 4373–4382. [Google Scholar]
- Kim, B.; Hong, D.; Park, J. Estimation of transmitted force through aiming bolt in headlamp module using lumped parameter modeling. Vibroengineering PROCEDIA 2020, 30, 15–19. [Google Scholar] [CrossRef]
- Etienne, B.; Jean, P.B. Prise En Compte De non linearite de Frottement Dans Les Optiques De Phare, SDTOOLS, Internal Reports.
- Rao, S.S. Mechanical Vibrations, 5th ed.; Addison Wesley: Boston, MA, USA, 1995. [Google Scholar]
- Puri, A. The art of free-body diagrams. Phys. Educ. 1996, 31, 155–157. [Google Scholar] [CrossRef]
- Steidel, R.F. An Introduction to Mechanical Vibrations, 3rd ed.; John Wiley & Sons, Inc: New York, NY, USA, 1989. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value (±0.01) | Parameter | Value (±0.01) | Parameter | Value (±0.01) |
|---|---|---|---|---|---|
| 0.5 kg | 0.00192 kg·m2 | 0.07 m | |||
| 0.3 kg | 0.008 kg·m2 | 0.23 m | |||
| 0.2 kg | 0.15 m | 0.17 m | |||
| 2 kg | 0.11 m | 0.16 m | |||
| 0.00098 kg·m2 | 0.07 m | 0.12 m | |||
| 0.000147 kg·m2 | 0.08 m | 0.09 m |
| Component | Force Transmitted (±5) | Case I | Case II | Increase |
|---|---|---|---|---|
| Projection Unit | FX1 | −29 | −94 | 65 (224%) |
| FY1 | 6 | 9 | 3 (150%) | |
| FZ1 | 23 | 65 | 42 (282%) | |
| Aiming Unit | FX2 | −41 | −132 | 91 (321%) |
| FY2 | −37 | −107 | 70 (289%) | |
| FZ2 | 27 | 71 | 44 (262%) | |
| Bracket Unit | FX3 | −67 | −222 | 155 (331%) |
| FY3 | 10 | 33 | 23 (330%) | |
| FZ3 | 53 | 181 | 128 (341%) | |
| Housing | FX4 | −47 | −155 | 108 (329%) |
| FY4 | −39 | −127 | 88 (325%) | |
| FZ4 | 49 | 150 | 101 (306%) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Din, M.M.U.; Kim, B. Development of Multi-DOF Model of Automotive LED Headlamp Assembly for Force Transmission Prediction Using MATLAB GUI. Appl. Sci. 2020, 10, 5906. https://doi.org/10.3390/app10175906
Din MMU, Kim B. Development of Multi-DOF Model of Automotive LED Headlamp Assembly for Force Transmission Prediction Using MATLAB GUI. Applied Sciences. 2020; 10(17):5906. https://doi.org/10.3390/app10175906
Chicago/Turabian StyleDin, Muhammad Moghees Ud, and Byeongil Kim. 2020. "Development of Multi-DOF Model of Automotive LED Headlamp Assembly for Force Transmission Prediction Using MATLAB GUI" Applied Sciences 10, no. 17: 5906. https://doi.org/10.3390/app10175906
APA StyleDin, M. M. U., & Kim, B. (2020). Development of Multi-DOF Model of Automotive LED Headlamp Assembly for Force Transmission Prediction Using MATLAB GUI. Applied Sciences, 10(17), 5906. https://doi.org/10.3390/app10175906