Application of Tooth Gear Impact-Echo System for Repeated and Rapid Data Acquisition



Abstract
1. Introduction
2. Theoretical Background
2.1. Impact-Echo Vibration
2.2. Air-Coupled Sensing Technology
3. Tooth Gear Testing System
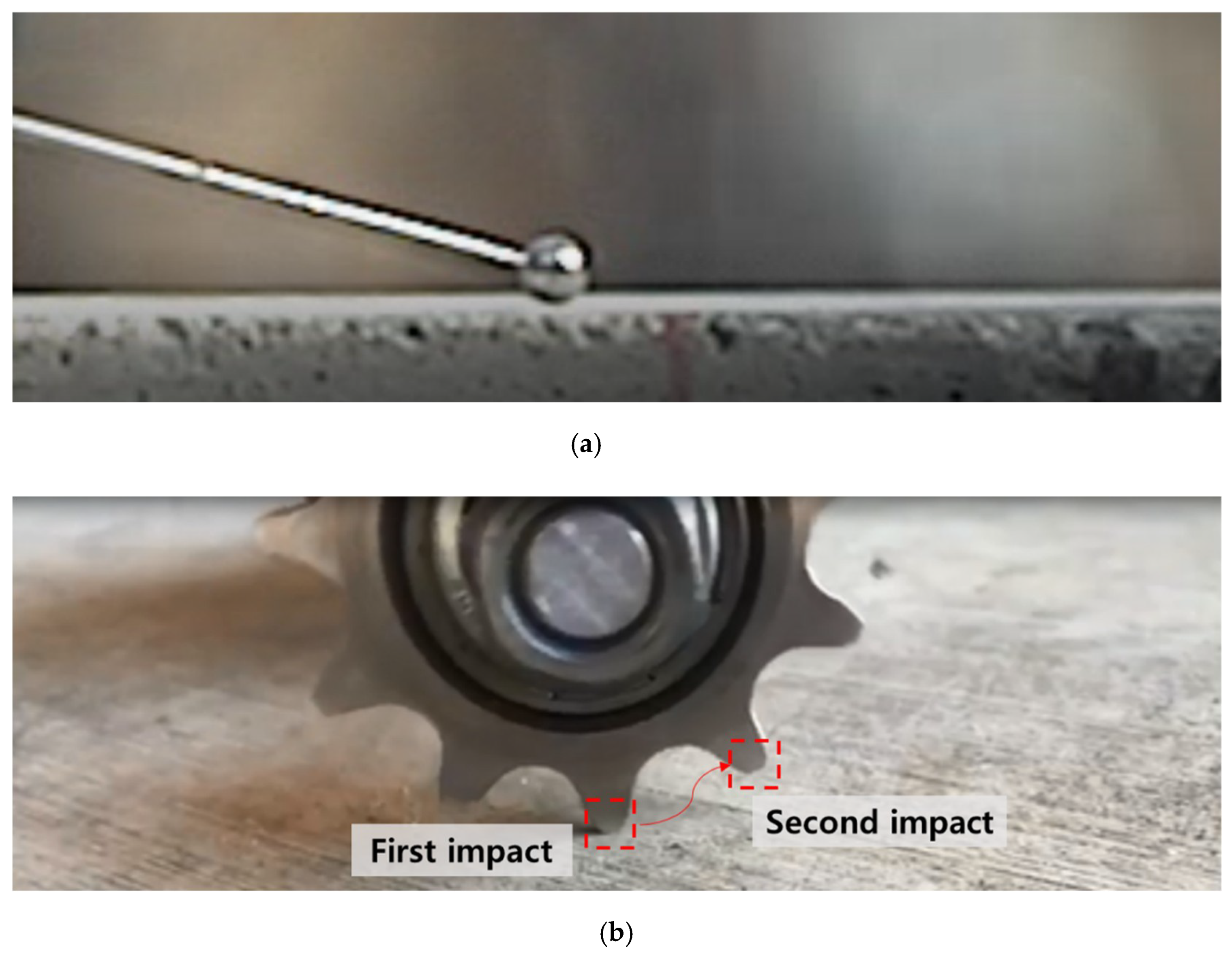
3.1. Impact Source Excitation by Tooth Gear
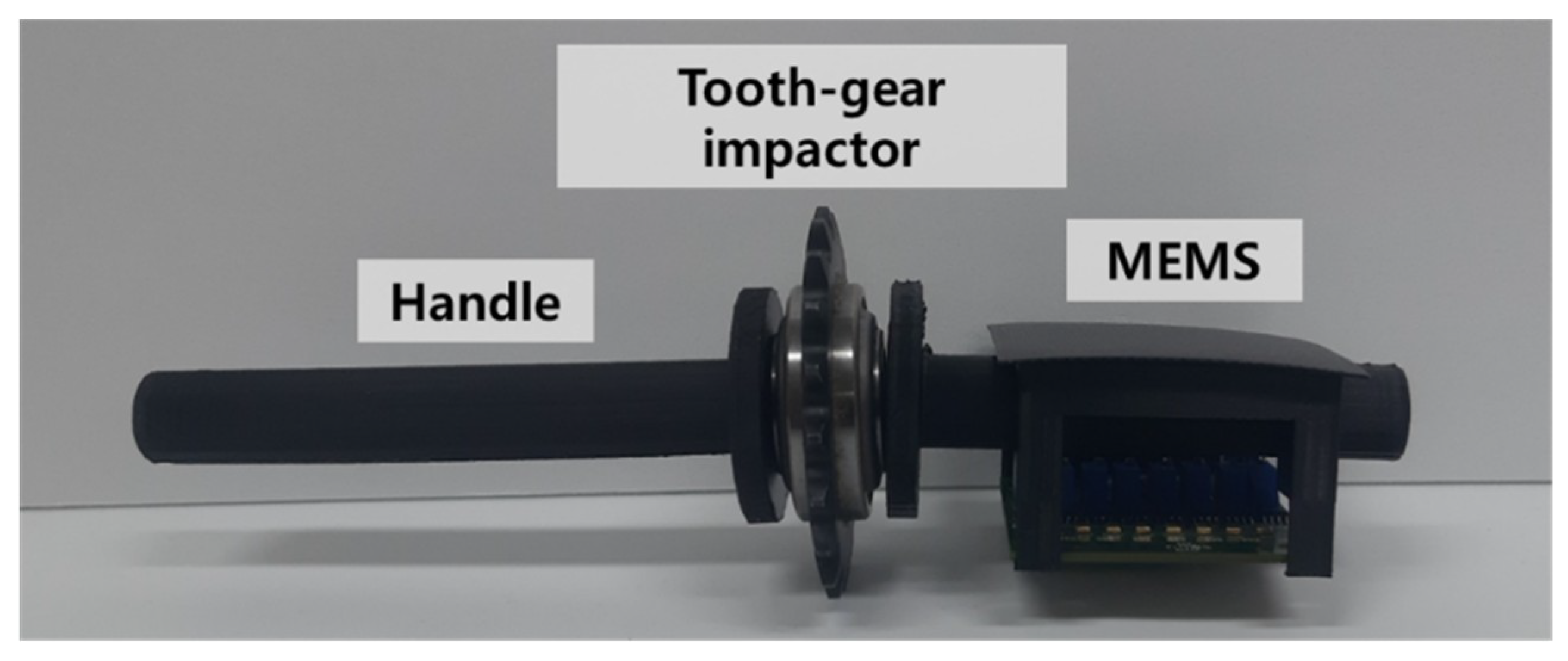
3.2. Tooth Gear IE System Design and Data Acquisition
4. Experiment and Results
4.1. Testing Slab and the IE Results
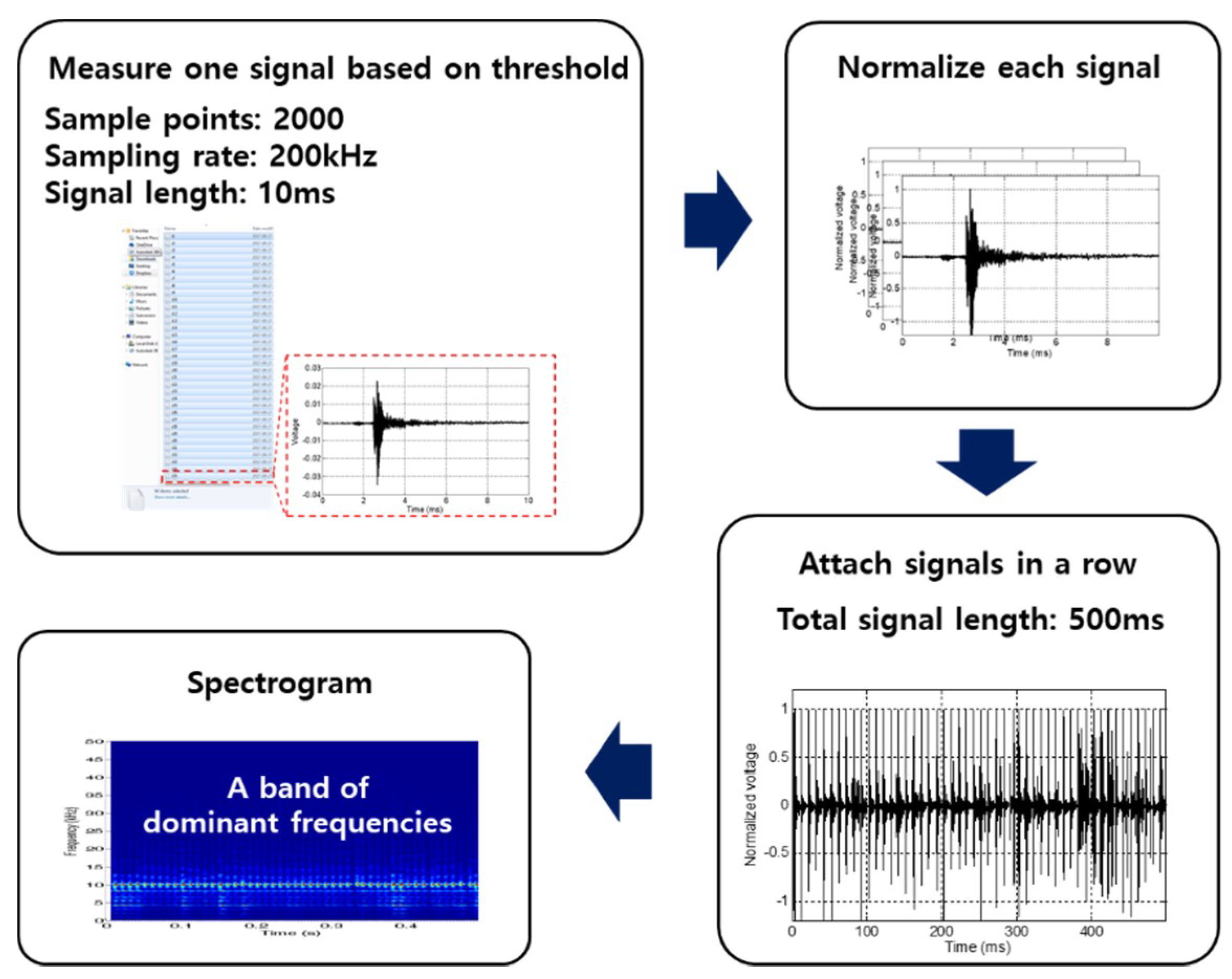
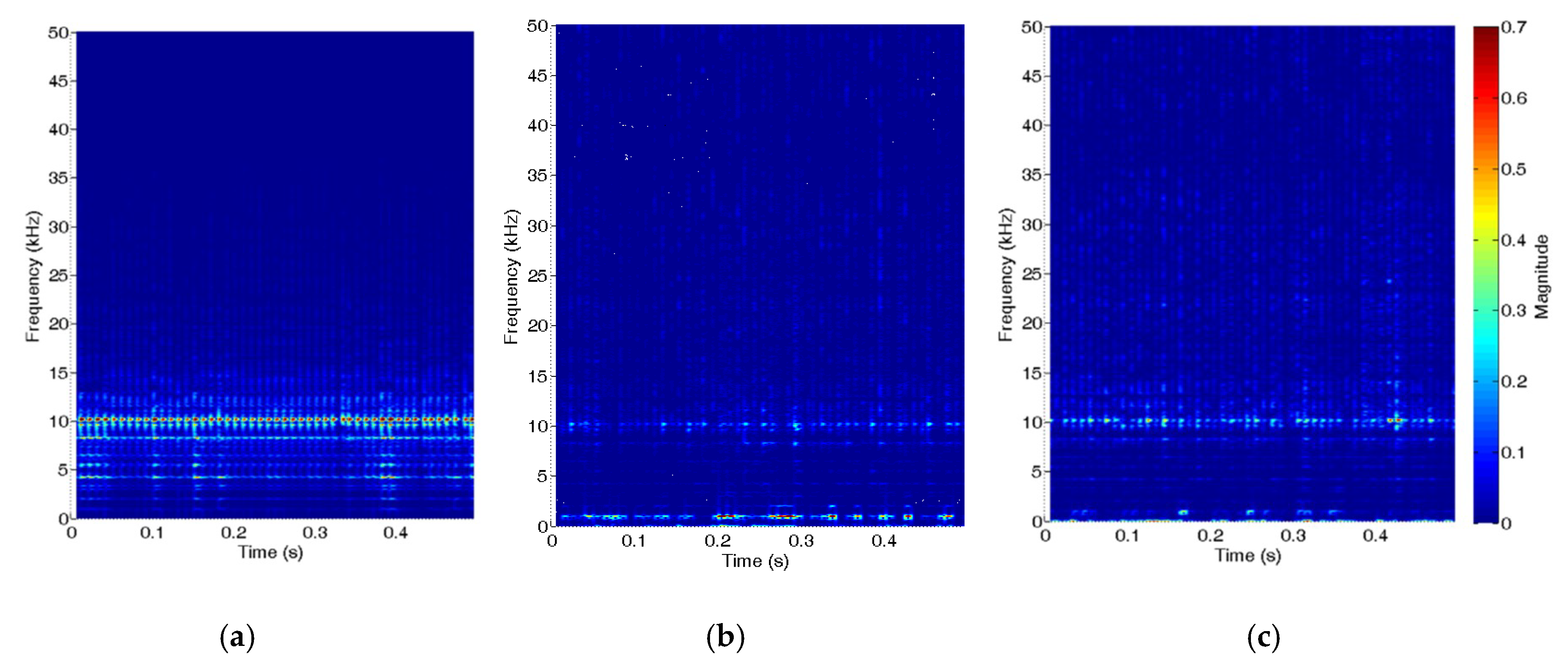
4.2. Data Visualization
5. Conclusions
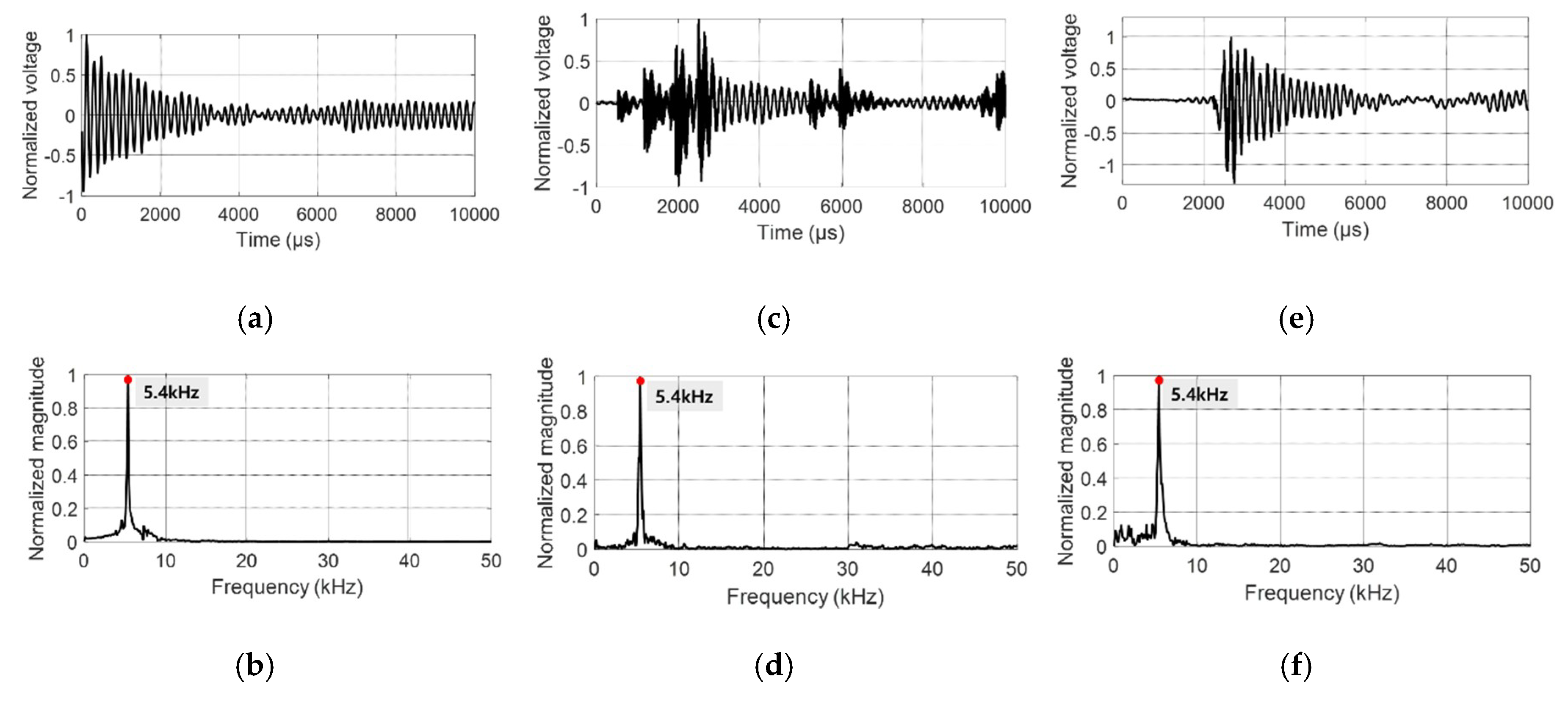
- the developed tooth gear IE system is possible to apply to an impact-echo test with low acoustic noise and provides fast data collection with continuous matter. A signal set of 100 data points was measurable within one min. Using the system, the thickness mode frequencies are measurable beyond flexural mode frequencies, and measured thickness mode frequencies corresponded well with the depth of the deep delamination;
- by analyzing different contact mechanism from conventional hammer-type impact, reducing the pitch or increasing the number of teeth decreased the contact duration and provided higher frequency excitation. Based on our experimental results, the 11-tooth gear was limited at generating the thickness mode from the 200 mm depth delamination, while the 30-tooth gear was successful;
- based on the contact mechanism, the contact duration of a conventional steel ball and two tooth gears was analyzed. The theoretical contact duration corresponded well with the actual contact duration measured using a high-speed camera, implying an excited frequency range;
- data visualization using spectrogram showed a band of dominant frequencies (repeated frequency modes) from the signal set, which helps operators to make decisions based on repeatable vibration modes.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Carino, N.J.; Sansalone, M.; Hsu, N.N. A point source-point receiver, pulse-wcho technique for flaw detection in concrete. ACI J. 1986, 83, 199–208. [Google Scholar]
- Cheng, C.; Sansalone, M. The impact-echo response of concrete plates containing delaminations: Numerical, experimental and field studies. Mater. Struct. 1993, 26, 274–285. [Google Scholar] [CrossRef]
- Sansalone, M.J.; Streett, W.B. Impact-Echo: Nondestructive Evaluation of Concrete and Masonry; Bullbrier Press: Ithica, NY, USA, 1997. [Google Scholar]
- Gibson, A.; Popovics, J.S. Lamb wave basis for impact-echo method analysis. J. Eng. Mech. 2015, 131, 438–443. [Google Scholar] [CrossRef]
- Zhu, J.; Popovics, J.S. Imaging concrete structures using air-coupled impact-echo. J. Eng. Mech. 2007, 133, 628–640. [Google Scholar] [CrossRef]
- Oh, T.; Popovics, J.S.; Sim, S.-H. Analysis of vibration for regions above rectangular delamination defects in solids. J. Sound Vib. 2013, 332, 1766–1776. [Google Scholar] [CrossRef]
- Kee, S.-H.; Gucunski, N. Interpretation of flexural vibration modes from impact-echo testing. J. Infrastruct. Syst. 2016, 22, 04160009. [Google Scholar] [CrossRef]
- Gucunski, N.; Yan, M.; Wang, Z.; Fang, T.; Maher, A. Rapid bridge deck condition assessment using three-dimensional visualization of impact echo data. J. Infrastruct. Syst. 2011, 18, 12–24. [Google Scholar] [CrossRef]
- Zhang, G.; Harichandran, R.S.; Ramuhalli, P. An automatic impact-based delamination detection system for concrete bridge decks. NDT E Int. 2012, 45, 120–127. [Google Scholar] [CrossRef]
- Mazzeo, B.A.; Patil, A.N.; Hurd, R.C.; Klis, J.M.; Truscott, T.T.; Guthrie, W.S. Air-coupled impact-echo delamination detection in concrete using spheres of ice for excitation. J. Nondestruct. Eval. 2014, 33, 317–326. [Google Scholar] [CrossRef]
- Sun, H.; Zhu, J.; Ham, S. Automated Acoustic Scanning System for Delamination Detection in Concrete Bridge Decks. J. Bridge Eng. 2018, 23, 04018027. [Google Scholar] [CrossRef]
- Evani, S.H.; Popovics, J.S. Utility of Rolling Impactor as a Source of Excitation for Impact-Echo Tests. SMT 2016, American Society for Nondestructive Testing. August 2016. Available online: https://publish.illinois.edu/saikalyanevani/previous-projects/07112020 (accessed on 11 July 2020).
- Clorennec, D.; Prada, C.; Royer, D. Local and noncontact measurements of bulk acoustic wave velocities in thin isotropic plates and shells using zero group velocity Lamb modes. J. Appl. Phys. 2007, 101, 034908. [Google Scholar] [CrossRef]
- Prada, C.; Clorennec, D. Influence of the anisotropy on zero-group velocity lamb modes. J. Acoust. Soc. Am. 2009, 126, 620–625. [Google Scholar] [CrossRef] [PubMed]
- Gomez, P.; Fernandez-Alvarez, J.P.; Ares, A.; Fernandez, E. Guided-wave approach for Spectral peaks characterization of impact-echo tests in layered systems. J. Infrastruct. Syst. 2017, 1, 0417009. [Google Scholar] [CrossRef]
- Choi, H.; Azari, H. Guided wave analysis of air-coupled impact-echo in concrete slab. Comput. Concr. 2017, 20, 257–262. [Google Scholar]
- Oh, T. Defect Characterization in Concrete Elements Using Vibration Analysis and Imaging. Ph.D. Dissertation, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 2012. [Google Scholar]
- Leissa, A.W. The free vibration of rectangular plates. J. Sound Vib. 1973, 31, 257–293. [Google Scholar] [CrossRef]
- Stronge, W.J. Impact Mechanics; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2000. [Google Scholar]
- Firouzi, K.; Cox, B.T.; Treeby, B.E.; Saffari, N. A first-order k-space model for elastic wave propagation in heterogeneous media. J. Acoust. Soc. Am. 2012, 132, 1271–1283. [Google Scholar] [CrossRef] [PubMed]
- Treeby, B.E.; Jaros, J.; Rohrbach, D.; Cox, B.T. Modelling Elastic Wave Propagation Using the k-Wave MATLAB Toolbox. In Proceedings of the 2014 IEEE International Ultrasonics Symposium, Chicago, IL, USA, 3–6 September 2014; pp. 146–149. [Google Scholar]
- Matsuyama, K.; Yamada, M.; Ohtsu, M. On-site measurement of delamination and surface crack in concrete structure by visualized NDT. Constr. Build. Mater. 2010, 24, 2381–2387. [Google Scholar] [CrossRef]
- Ohtsu, M.; Watanabe, T. Stack imaging of spectral amplitudes based on impact-echo for flaw detection. NDT E Int. 2002, 35, 189–196. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameters | Value | Simulation Parameters | Value | ||
|---|---|---|---|---|---|
| CFL | 0.1 | Input source | Type | Half sine wave | |
| Number of grids (Nx) | 500 | Range of frequency | 30 kHz | ||
| Number of grids (Ny) | 1000 | Location | (290, 500) | ||
| Mesh size (dx) | 1 mm | Sensor | Number of sensors | 40 | |
| Mesh size (dy) | 1 mm | Spacing | 5 mm | ||
| Length of grid | Concrete | 190 × 1000 mm | Concrete | Elastic modulus | 30 GPa |
| Air | 310 × 1000 mm | ||||
| Operation time | 1.5 ms | Density | 2400 kg/m3 | ||
| dt | 5 0 ns | Air | Density | 240 kg/m3 | |
| Testing Locations | Depth (mm) | Measured Frequency (kHz) | ||
|---|---|---|---|---|
| 12 mm Ball Hammer | 11-Tooth Gear | 30-Tooth Gear | ||
| Shallow delamination | 60 | 5.4 | ||
| Deep delamination | 200 | 10.2 | 1.5 | 10.2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, J.; Choi, H.; Oh, T.K. Application of Tooth Gear Impact-Echo System for Repeated and Rapid Data Acquisition. Appl. Sci. 2020, 10, 4784. https://doi.org/10.3390/app10144784
Hong J, Choi H, Oh TK. Application of Tooth Gear Impact-Echo System for Repeated and Rapid Data Acquisition. Applied Sciences. 2020; 10(14):4784. https://doi.org/10.3390/app10144784
Chicago/Turabian StyleHong, Jinyoung, Hajin Choi, and Tae Keun Oh. 2020. "Application of Tooth Gear Impact-Echo System for Repeated and Rapid Data Acquisition" Applied Sciences 10, no. 14: 4784. https://doi.org/10.3390/app10144784
APA StyleHong, J., Choi, H., & Oh, T. K. (2020). Application of Tooth Gear Impact-Echo System for Repeated and Rapid Data Acquisition. Applied Sciences, 10(14), 4784. https://doi.org/10.3390/app10144784