Winged Aerial Manipulation Robot with Dual Arm and Tail



Abstract
1. Introduction
2. Design of Winged Aerial Robot with Dual Arm and Tail
2.1. Concept Design and Intended Applications
- Search and rescue of injured people in places of difficult access such as mountains or forests, using the arms to take measurements of the temperature, heartbeat, or breath of the person, placing the sensors at the appropriate points.
- Inspection and maintenance of vast infrastructures like power lines, or wind and solar farms, performing typical measurements at points of interest for detecting surface corrosion, leaks, or damaged components.
- Delivery and retrieval of medicines, tools, or small devices, requiring close interaction with humans or the environment without the risk of injury or damage.
- Spread seeds for growing plants, perch on trees for monitoring and tracking bird activities (migration, nesting, breeding), or analyze soil pH.
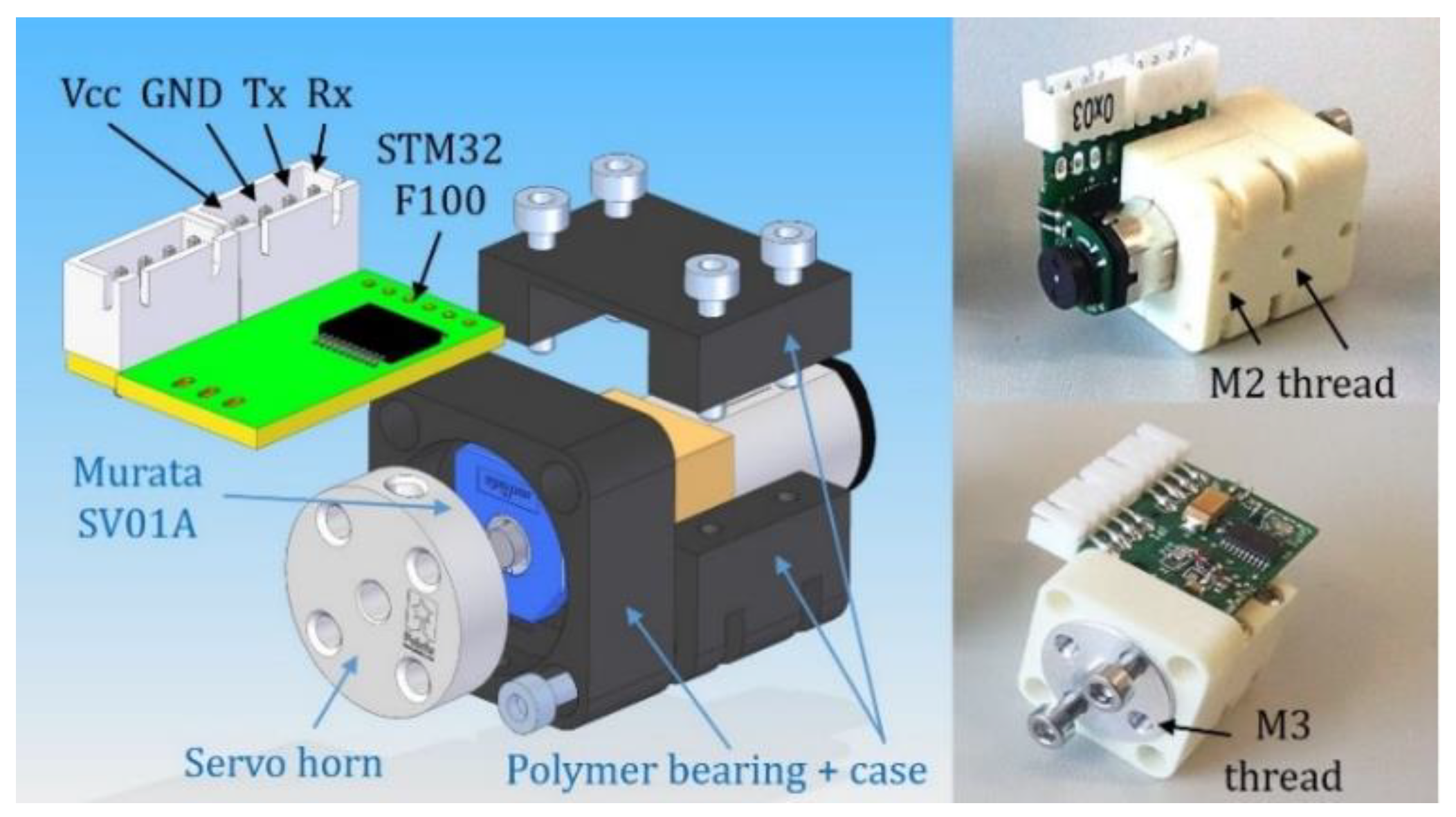
2.2. Modular Actuator Design
- Closed-loop position control with the feedback given by the output shaft potentiometer.
- Closed-loop velocity control using the magnetic encoder attached to the motor shaft.
- Current/torque control, acting over the PWM (pulse width modulation) signal of the driver.
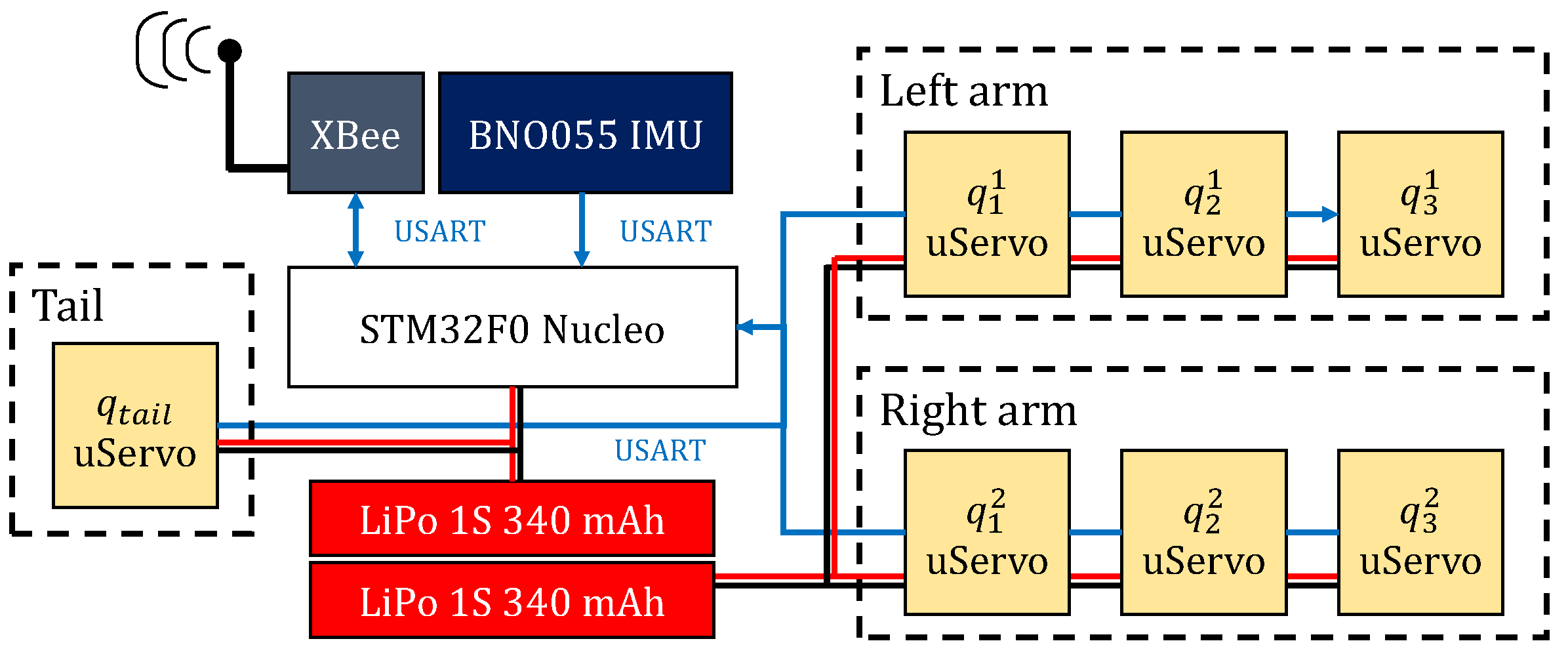
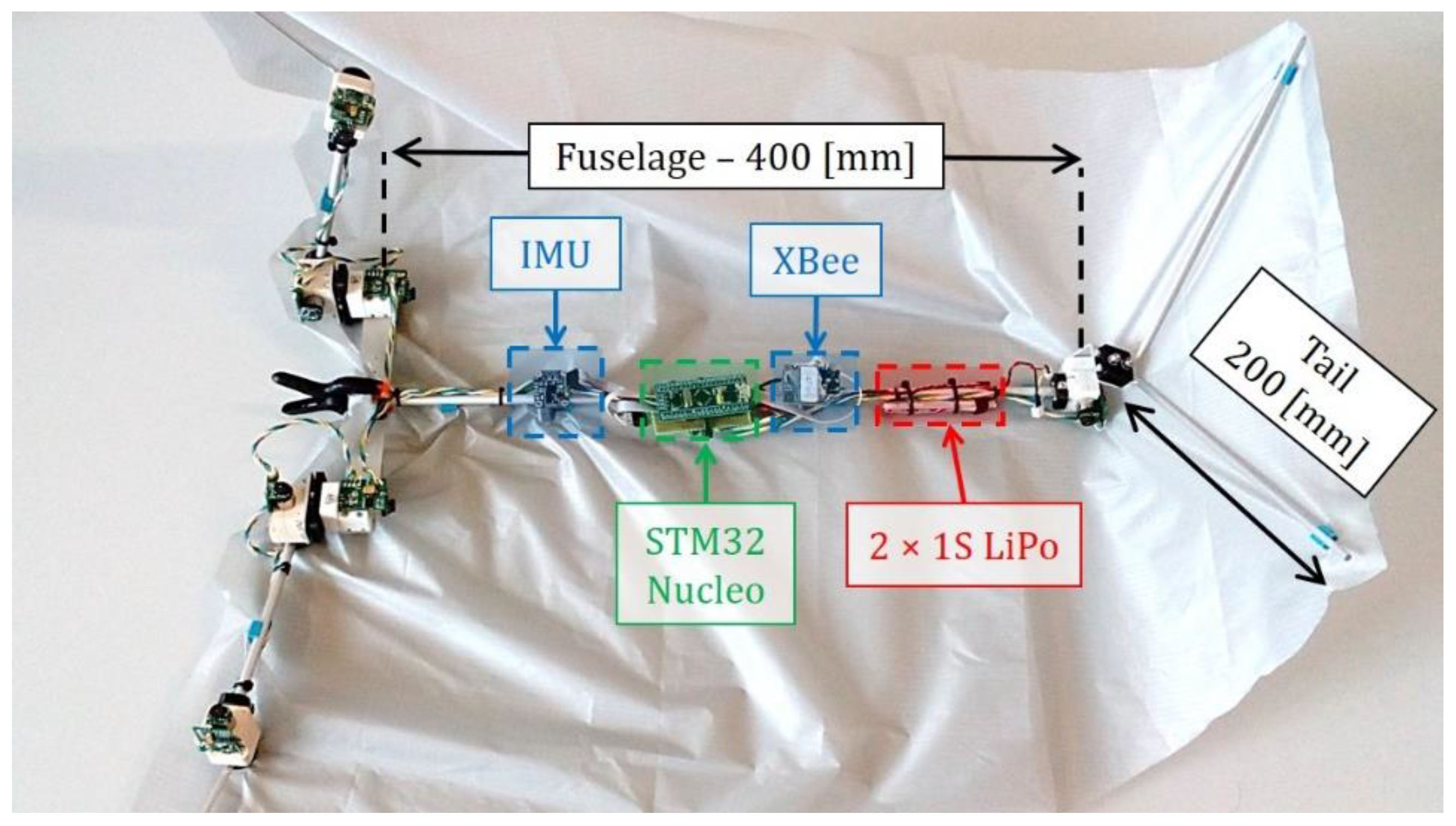
2.3. Design of Winged Aerial Manipulation Robot
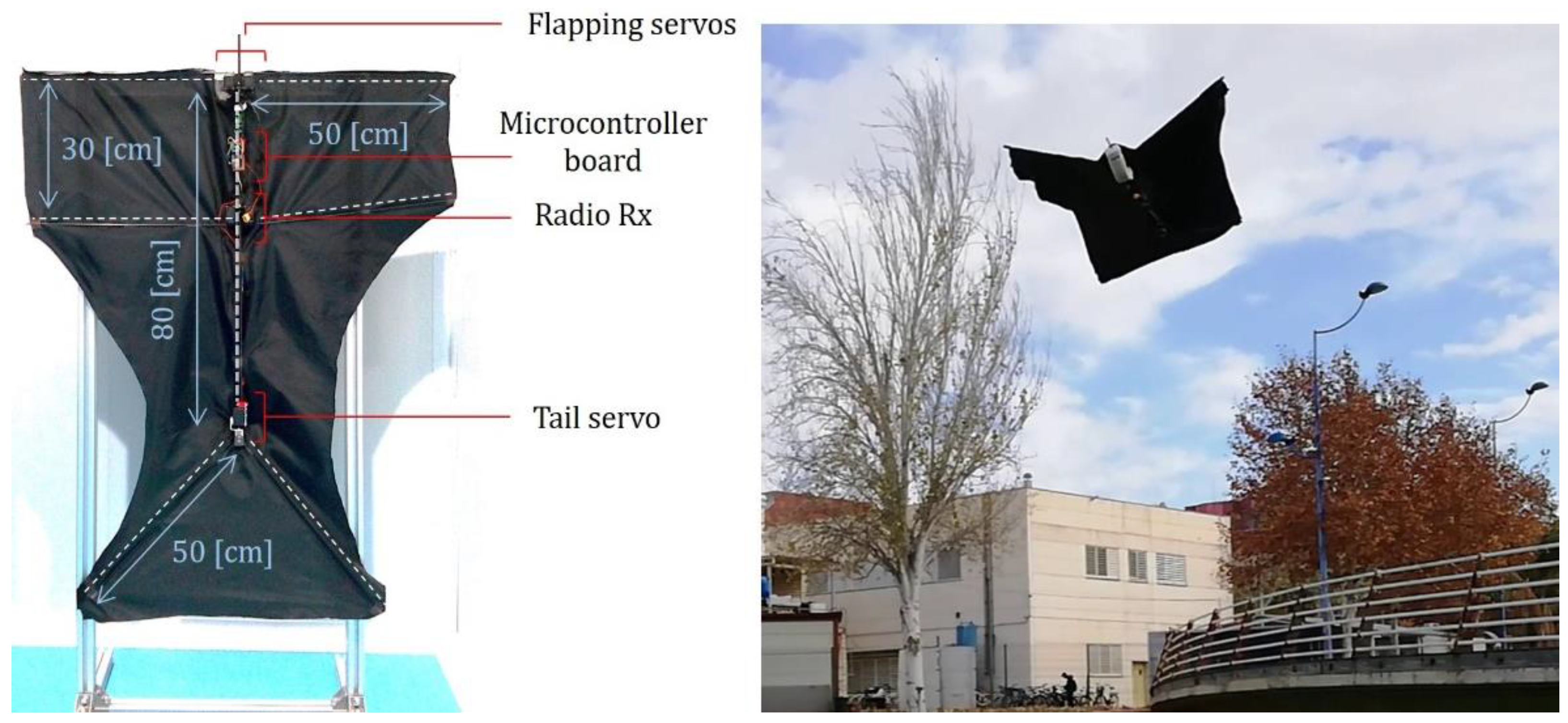
2.4. Design of Flapping-Wing Aerial Robot
3. Modeling and Control
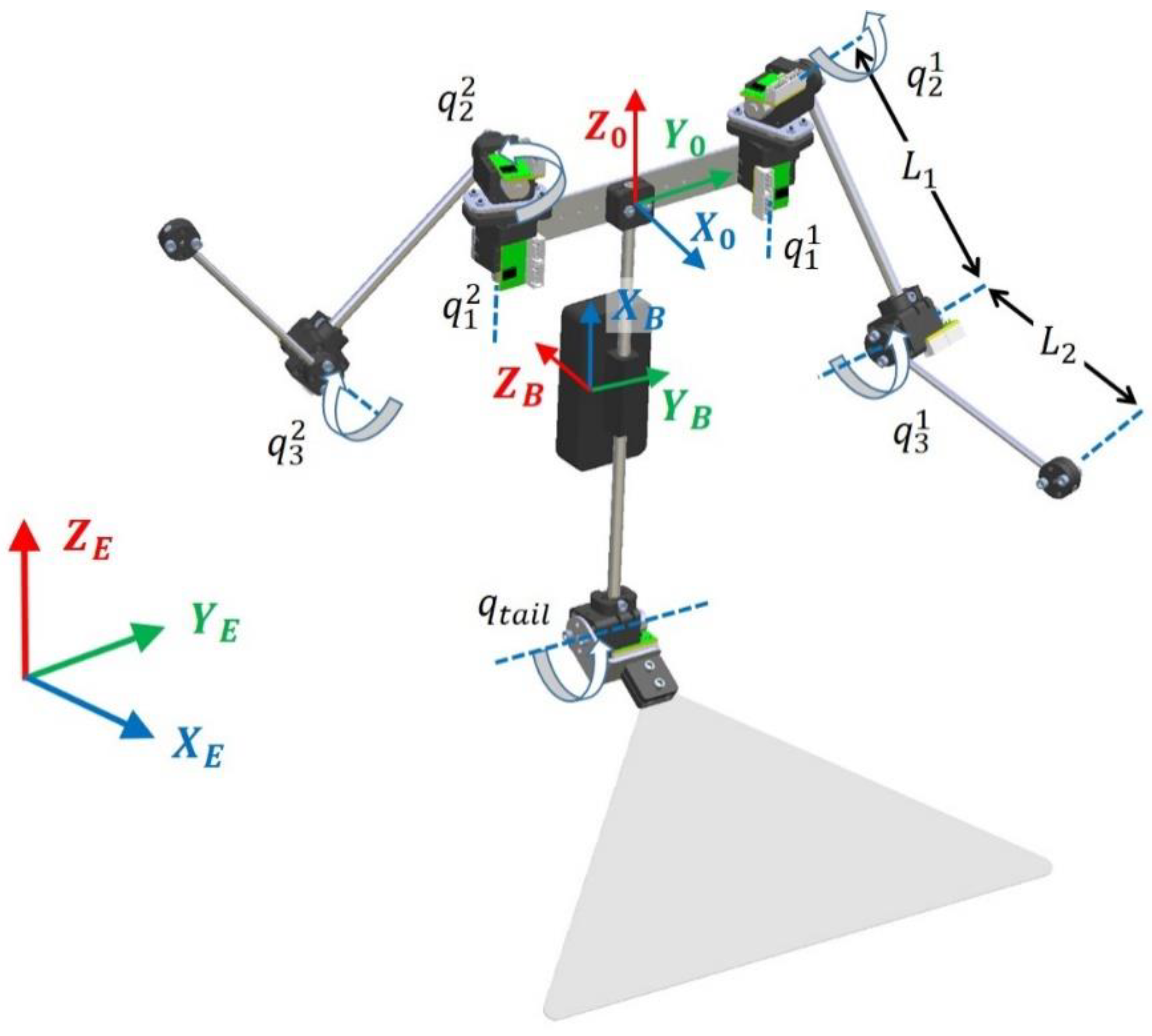
3.1. Kinematic Model
3.2. Dynamic Model
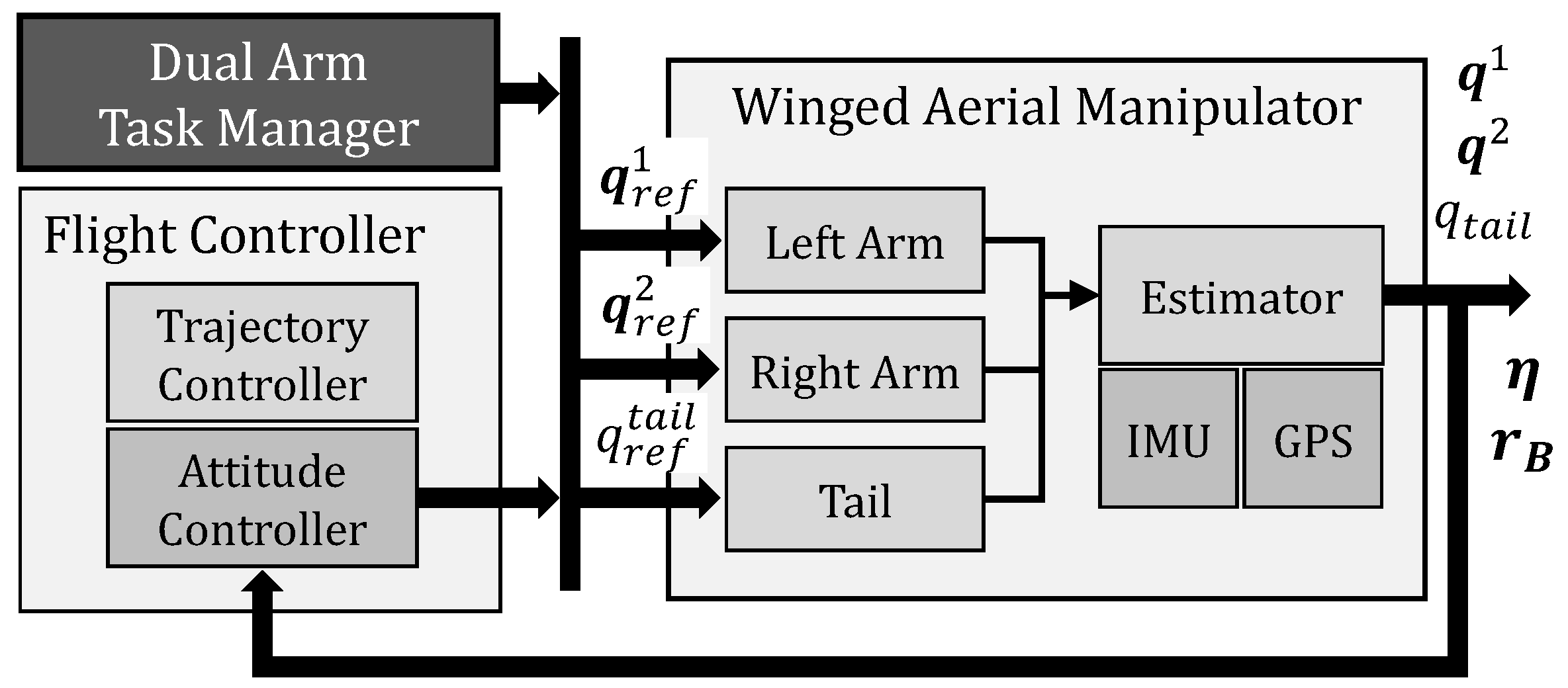
3.3. Control Scheme
4. Aerodynamic Analysis
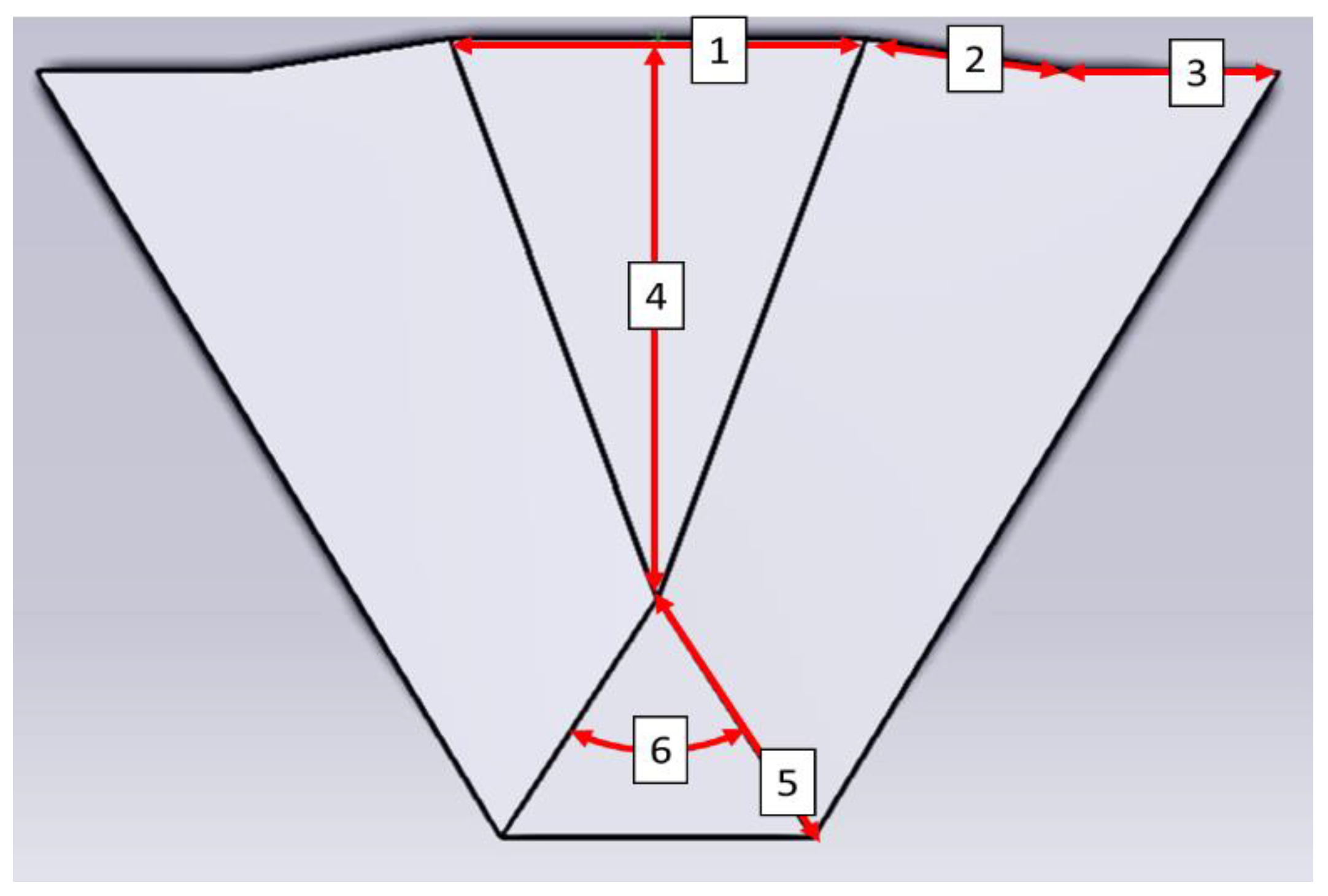
4.1. Identification of Aerodynamic Surfaces
4.2. CFD Setup
4.3. Trimming
4.4. CFD Simulation Results
5. Experimental Results
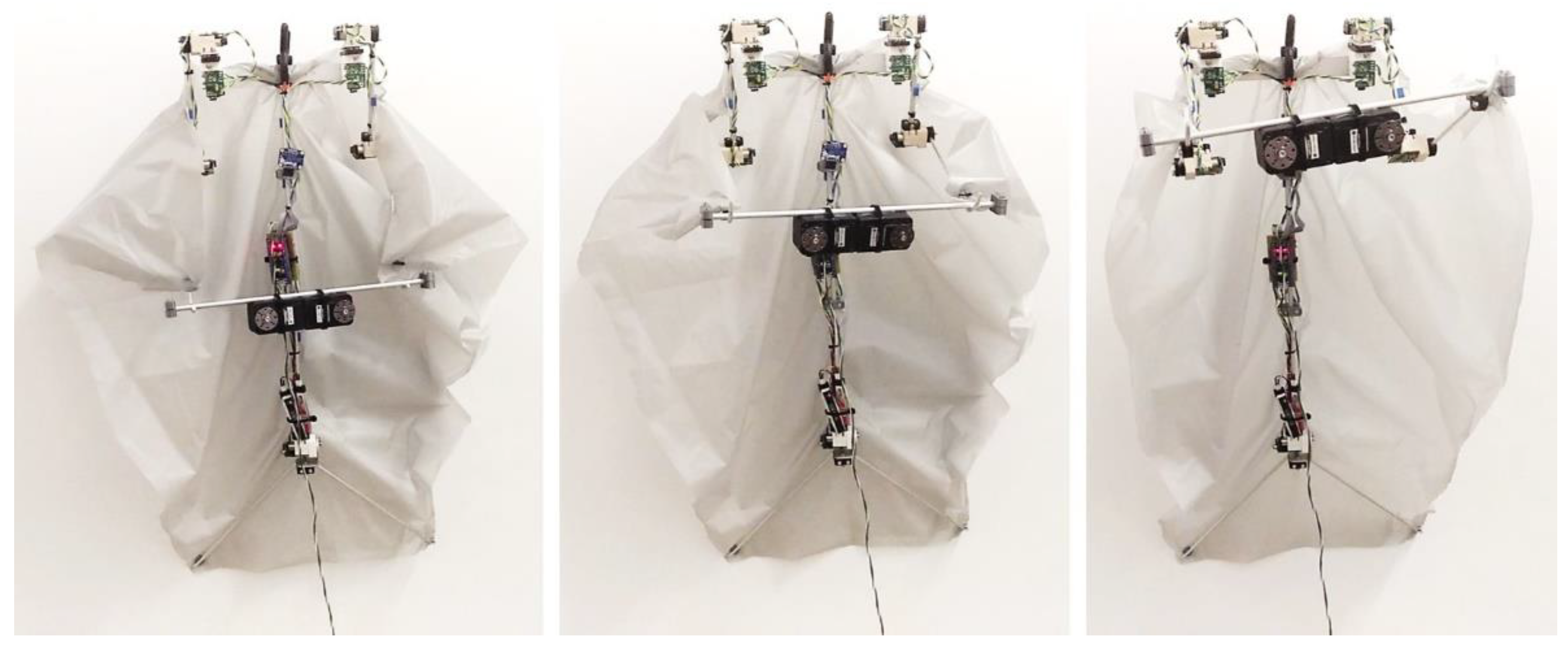
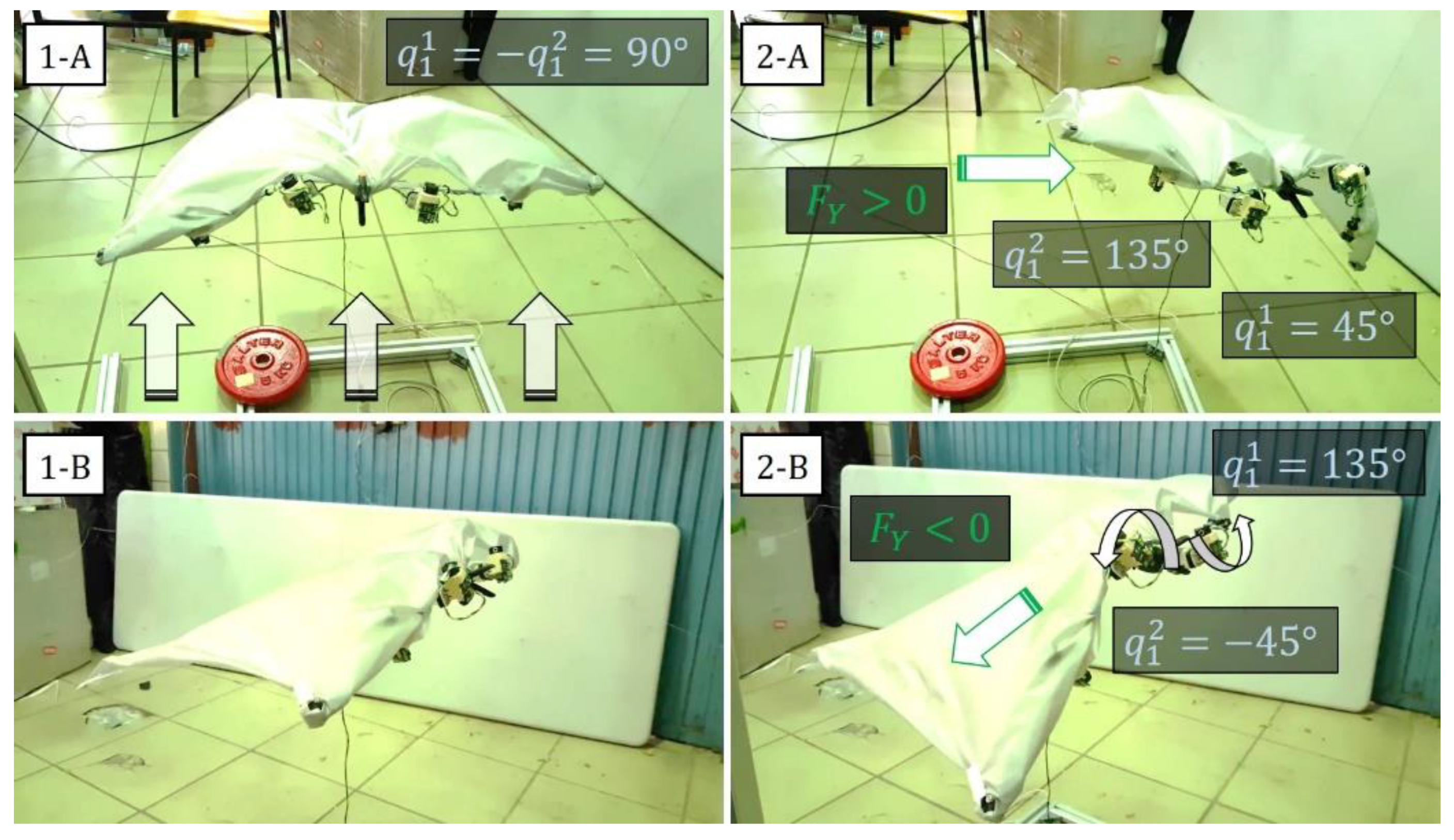
5.1. Gliding Manipulation Configurations
5.2. Manipulation Capability
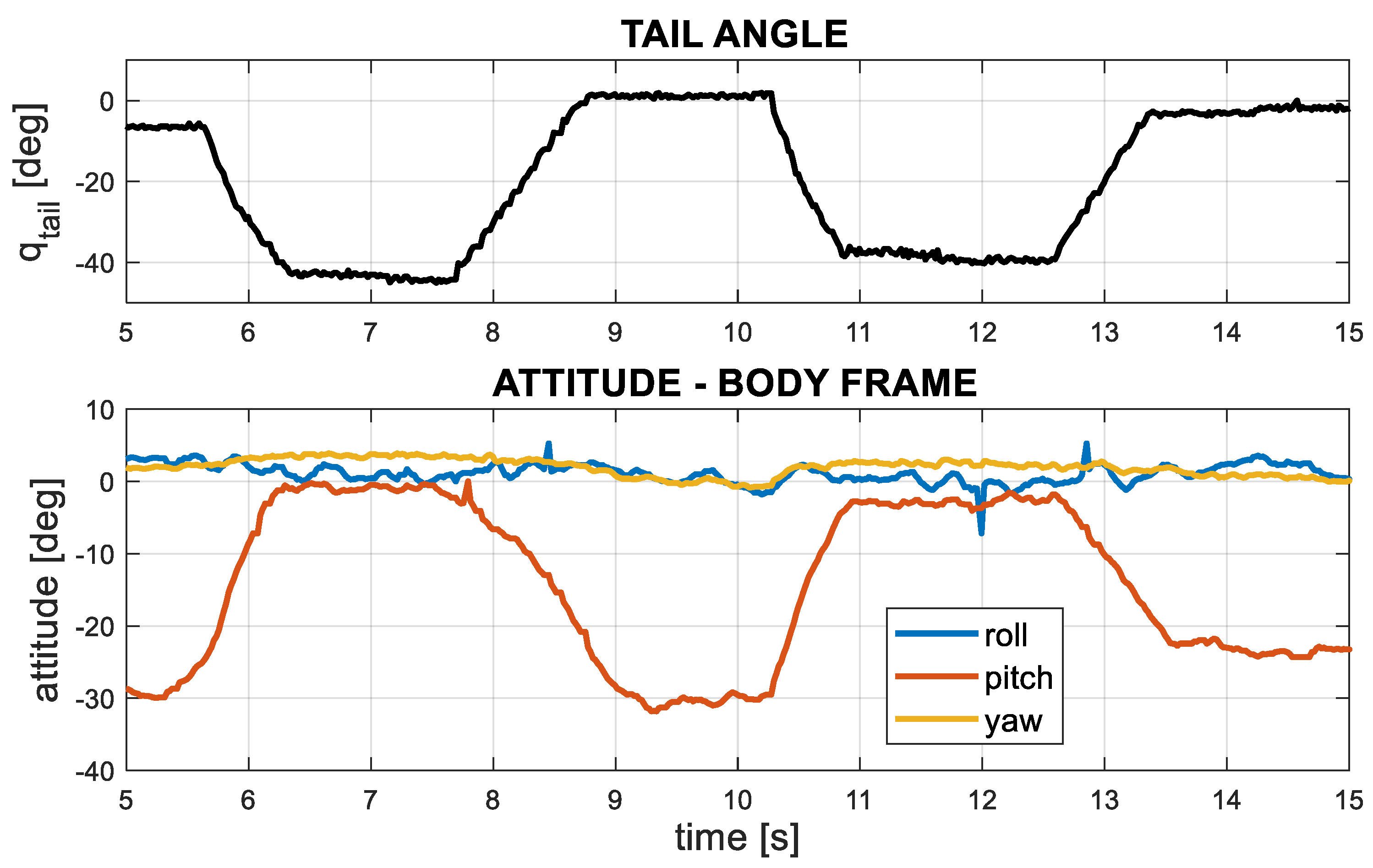
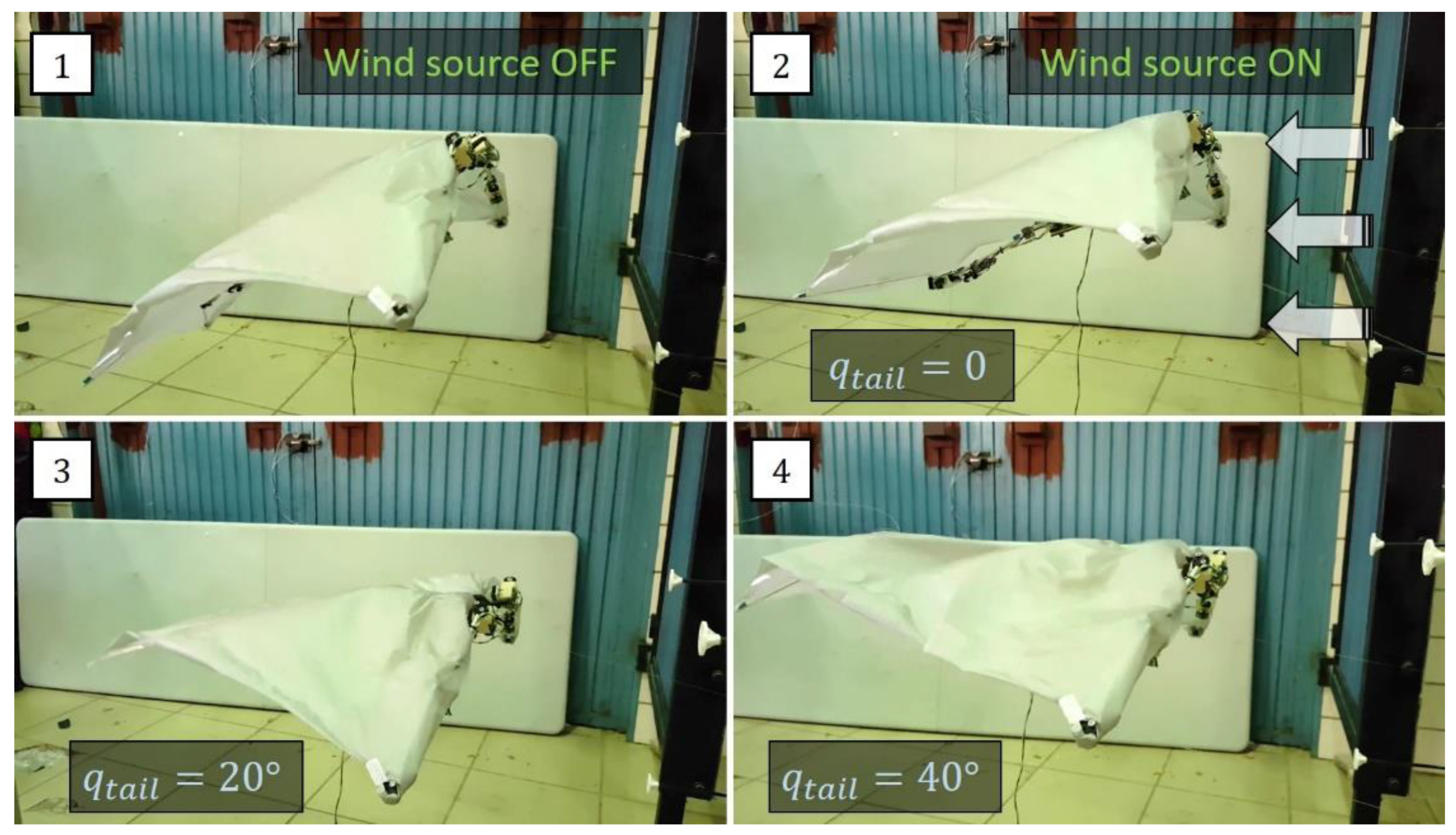
5.3. Evaluation of Gliding Capability
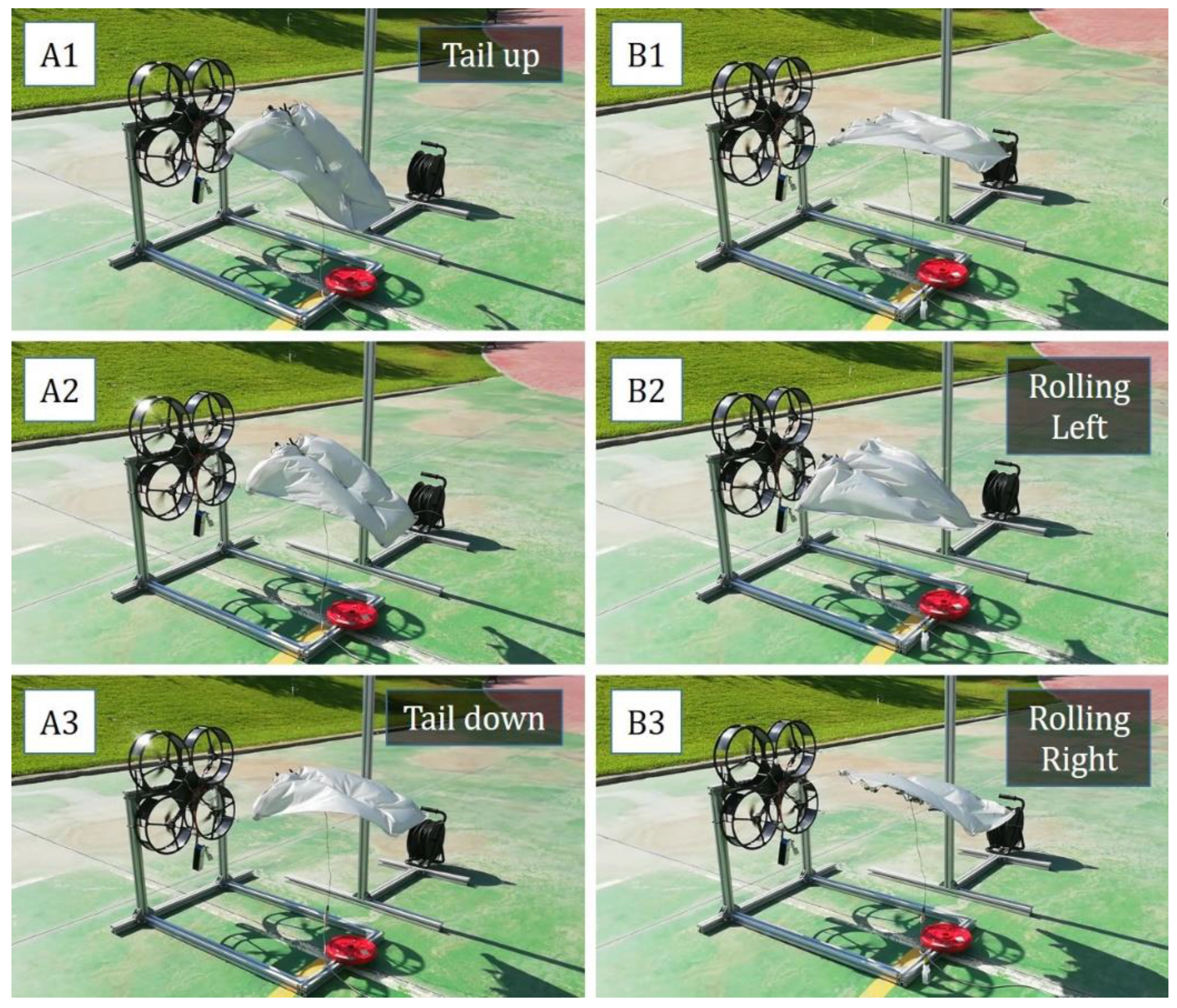
5.4. Outdoor Flight Tests with Winged Aerial Robot
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kim, S.; Choi, S.; Kim, H.J. Aerial manipulation using a quadrotor with a two DOF robotic arm. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4990–4995. [Google Scholar]
- Ruggiero, F.; Trujillo, M.; Cano, R.; Ascorbe, H.; Viguria, A.; Perez, C.; Lippiello, V.; Ollero, A.; Siciliano, B. A multilayer control for multirotor UAVs equipped with a servo robot arm. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4014–4020. [Google Scholar]
- Orsag, M.; Korpela, C.; Bogdan, S.; Oh, P. Valve turning using a dual-arm aerial manipulator. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 836–841. [Google Scholar]
- Ollero, A.; Cortes, J.; Santamaria-Navarro, A.; Soto, M.A.T.; Balachandran, R.; Andrade-Cetto, J.; Rodriguez, A.; Heredia, G.; Franchi, A.; Antonelli, G.; et al. The AEROARMS Project: Aerial Robots with Advanced Manipulation Capabilities for Inspection and Maintenance. IEEE Robot. Autom. Mag. 2018, 25, 12–23. [Google Scholar] [CrossRef]
- Suarez, A. Compliant Aerial Manipulation. Ph.D. Thesis, University of Seville, Sevilla, Spain, 2019. [Google Scholar]
- GRIFFIN ERC Advanced Grant Project. General Compliant Aerial Robotic Manipulation System Integrating Fixed and Flapping Wings to INcrease Range and Safety. Available online: https://griffin-erc-advanced-grant.eu/ (accessed on 10 July 2020).
- Suarez, A.; Perez, M.; Heredia, G.; Ollero, A. Small-Scale Compliant Dual Arm with Tail for Winged Aerial Robots. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems, Macau, China, 4–8 November 2019; pp. 208–214. [Google Scholar]
- Trujillo, M.Á.; Dios, J.R.M.-D.; Martín, C.; Viguria, A.; Ollero, A. Novel Aerial Manipulator for Accurate and Robust Industrial NDT Contact Inspection: A New Tool for the Oil and Gas Inspection Industry. Sensors 2019, 19, 1305. [Google Scholar] [CrossRef] [PubMed]
- Tognon, M.; Chavez, H.A.T.; Gasparin, E.; Sable, Q.; Bicego, D.; Mallet, A.; Lany, M.; Santi, G.; Revaz, B.; Cortés, J.; et al. A Truly-Redundant Aerial Manipulator System with Application to Push-and-Slide Inspection in Industrial Plants. IEEE Robot. Autom. Lett. 2019, 4, 1846–1851. [Google Scholar] [CrossRef]
- Paul, H.; Ono, K.; Ladig, R.; Shimonomura, K. A Multirotor Platform Employing a Three-Axis Vertical Articulated Robotic Arm for Aerial Manipulation Tasks. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 478–485. [Google Scholar]
- AERONES. Cleaning Drone. Available online: https://www.youtube.com/watch?v=eBVRQDRY5mY (accessed on 10 July 2020).
- Ryll, M.; Bicego, D.; Franchi, A. Modeling and control of FAST-Hex: A fully-actuated by synchronized-tilting hexarotor. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 1689–1694. [Google Scholar]
- Brescianini, D.; D’Andrea, R. Design, modeling and control of an omni-directional aerial vehicle. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3261–3266. [Google Scholar]
- Woods, M.I.; Henderson, J.F.; Lock, G.D. Energy requirements for the flight of micro air vehicles. Aeronaut. J. 2001, 105, 135–149. [Google Scholar] [CrossRef]
- Beard, R.W.; Kingston, D.; Quigley, M.; Snyder, D.; Christiansen, R.; Johnson, W.; McLain, T.; Goodrich, M. Autonomous Vehicle Technologies for Small Fixed-Wing UAVs. J. Aerosp. Comput. Information, Commun. 2005, 2, 92–108. [Google Scholar] [CrossRef]
- Paranjape, A.; Kim, J.; Chung, S.-J. Closed-Loop Perching and Spatial Guidance Laws for Bio-Inspired Articulated Wing MAV. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; p. 4979. [Google Scholar]
- Bachmann, T. Anatomical, Morphometrical and Biomechanical Studies of Barn Owls and Pigeons’ Wings. Ph.D. Thesis, RTWH Aachen University, Aachenm, Germany, 2011. [Google Scholar]
- Chirarattananon, P.; Chen, Y.; Helbling, E.F.; Ma, K.Y.; Cheng, R.; Wood, R.J. Dynamics and flight control of a flapping-wing robotic insect in the presence of wind gusts. Interface Focus 2017, 7, 20160080. [Google Scholar] [CrossRef] [PubMed]
- Pounds, P.E.I.; Deer, W.; Deer, W. The Safety Rotor—An Electromechanical Rotor Safety System for Drones. IEEE Robot. Autom. Lett. 2018, 3, 2561–2568. [Google Scholar] [CrossRef]
- Ramezani, A.; Shi, X.; Chung, S.-J.; Hutchinson, S. Bat Bot (B2), a biologically inspired flying machine. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3219–3226. [Google Scholar]
- FESTO. Bionic Flying Fox. Available online: https://www.festo.com/group/en/cms/13130.htm (accessed on 10 July 2020).
- Suarez, A.; Jimenez-Cano, A.E.; Vega, V.M.; Heredia, G.; Castaño, A.R.; Ollero, A. Design of a lightweight dual arm system for aerial manipulation. Mechatronics 2018, 50, 30–44. [Google Scholar] [CrossRef]
- Viedeler, J.J. Avian Flight; Oxford University Press: Oxford, NY, USA, 2006. [Google Scholar]
- All about Birds. Available online: https://www.allaboutbirds.org (accessed on 10 July 2020).
- Vinuesa, R.; Negi, P.; Atzori, M.; Hanifi, A.; Henningson, D.; Schlatter, P. Turbulent boundary layers around wing sections up to Rec=1,000,000. Int. J. Heat Fluid Flow 2018, 72, 86–99. [Google Scholar] [CrossRef]
- Vinuesa, R.; Örlü, R.; Sanmiguel Vila, C.; Ianiro, A.; Discetti, S.; Schlatter, P. Revisting history effects in adverse-pressure-gradient turbulent boundary layers. Flow Turbul. Combust. 2017, 99, 565–587. [Google Scholar] [CrossRef]
- Suarez, A.; Vega, V.M.; Fernandez, M.J.; Heredia, G.; Ollero, A. Benchmarks for Aerial Manipulation. IEEE Robot. Autom. Lett. 2020, 5, 2650–2657. [Google Scholar] [CrossRef]
- Video of the Experiments. Available online: https://www.youtube.com/watch?v=guwlbkGFcEY (accessed on 10 July 2020).





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | Weight (g) | Wingspan (cm) | Flight Speed (m/s) | Power (W) |
|---|---|---|---|---|
| Black-billed magpie | 145–210 | 56–61 | 14 | – |
| Laughing gull | 277–322 | 94–120 | 12 | 18–26 |
| Bar-tailed godwit | 285–454 | 70–81 | 16 | 17–24 |
| Pigeon | 394–442 | 64–80 | 17 | 32–34 |
| Raven | 480 | 104–110 | 11 | 32 |
| Multirotor Aerial Manipulator | Winged Aerial Manipulator | |
|---|---|---|
| Benefits |
|
|
| Drawbacks |
|
|
| Structure | Mass | Ixx | Iyy | Izz | Ixy | Ixz | Iyz |
|---|---|---|---|---|---|---|---|
| Shoulder | 73 | 3240 | 133 | 3270 | 0 | 0 | 0 |
| Sh. pitch | 36 (×2) | 50 | 44 | 47 | 0 | 0 | −3 |
| Upper arm | 37 (×2) | 728 | 713 | 30 | 0 | −2 | 6 |
| Forearm | 12 (×2) | 277 | 278 | 3 | 0 | 0 | −1 |
| Fuselage | 17 | 2603 | 2603 | 1 | 0 | 0 | 0 |
| Tail | 19 | 910 | 479 | 1387 | 0 | 0 | 0 |
| Configuration 1 | Configuration 2 | Configuration 3 | Configuration 4 | Configuration 5 |
|---|---|---|---|---|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suarez, A.; Grau, P.; Heredia, G.; Ollero, A. Winged Aerial Manipulation Robot with Dual Arm and Tail. Appl. Sci. 2020, 10, 4783. https://doi.org/10.3390/app10144783
Suarez A, Grau P, Heredia G, Ollero A. Winged Aerial Manipulation Robot with Dual Arm and Tail. Applied Sciences. 2020; 10(14):4783. https://doi.org/10.3390/app10144783
Chicago/Turabian StyleSuarez, Alejandro, Pedro Grau, Guillermo Heredia, and Anibal Ollero. 2020. "Winged Aerial Manipulation Robot with Dual Arm and Tail" Applied Sciences 10, no. 14: 4783. https://doi.org/10.3390/app10144783
APA StyleSuarez, A., Grau, P., Heredia, G., & Ollero, A. (2020). Winged Aerial Manipulation Robot with Dual Arm and Tail. Applied Sciences, 10(14), 4783. https://doi.org/10.3390/app10144783