Thermal Buckling and Free Vibration Analysis of Functionally Graded Plate Resting on an Elastic Foundation According to High Order Shear Deformation Theory Based on New Shape Function

 ,
,  , , ,
, , ,  ,
,
Abstract
1. Introduction
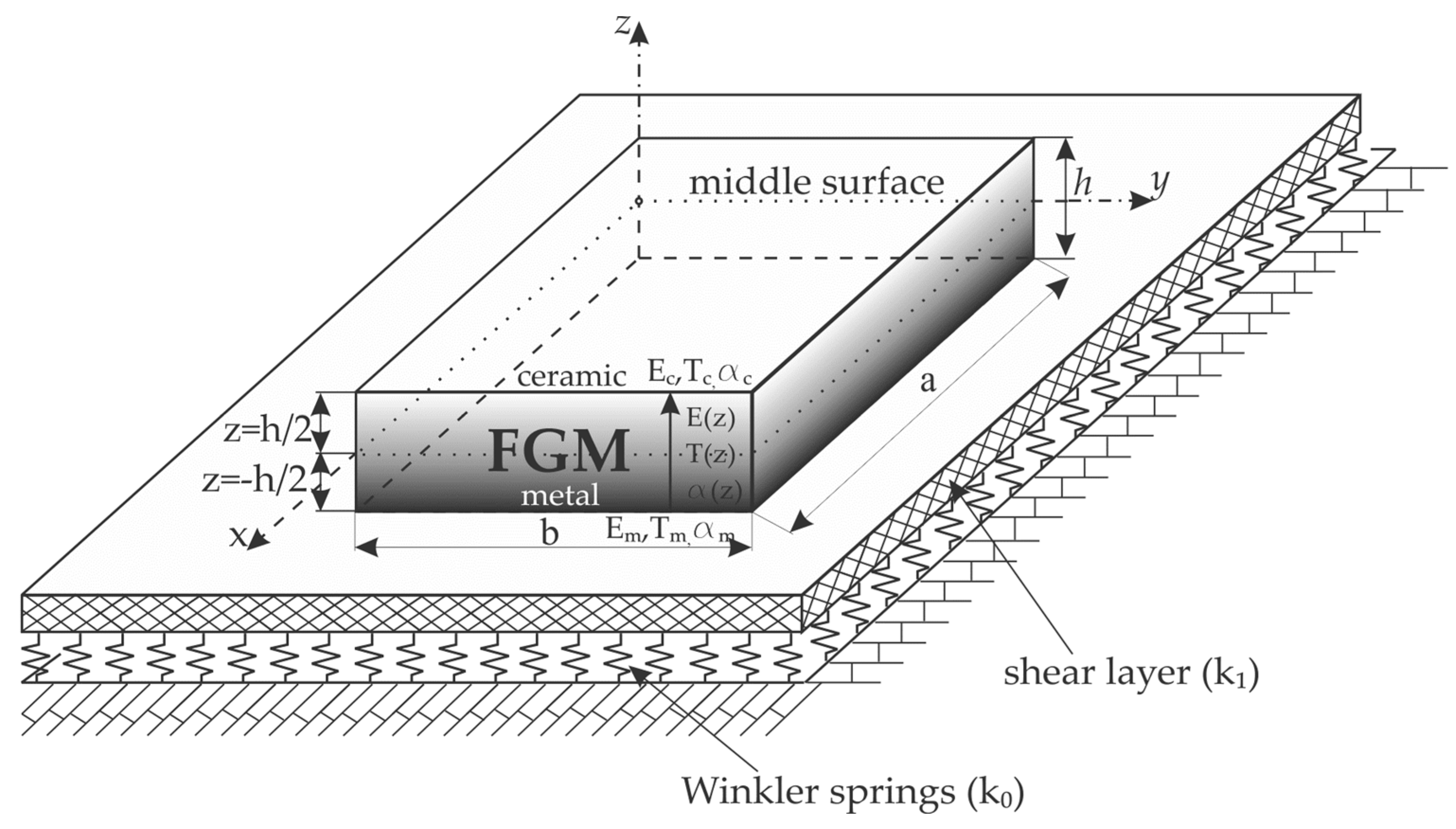
2. Mathematical Model of the Functionally Graded Plate Placed on Elastic Foundation
- k0 is stiffness of Winkler foundation,
- k1 represents shear stiffness (Pasternak coefficient).
3. Equilibrium and Stability Equations of FG Plate Placed on Elastic Foundation
4. Equations of Motion of FG Plate Placed on Elastic Foundation
- -material density in an arbitrary cross-section z,
5. Numerical Examples and Results
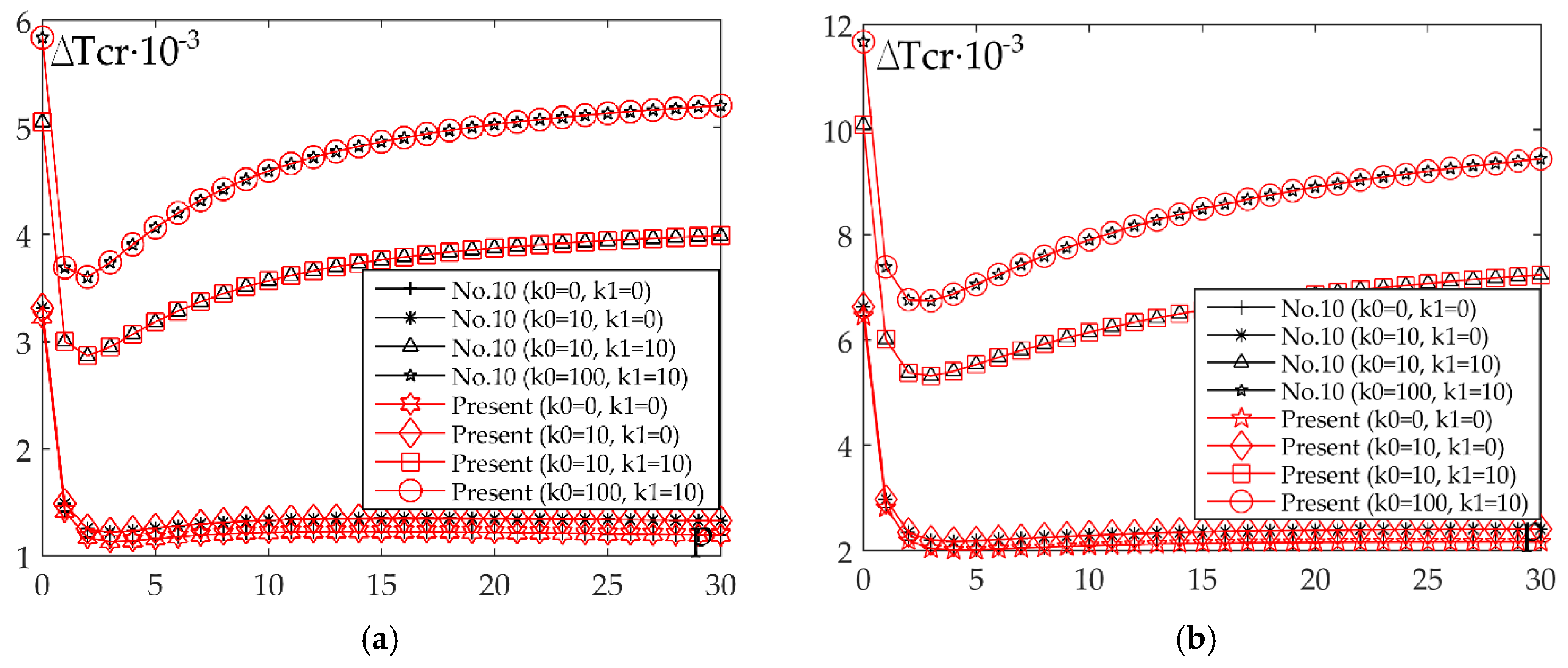
5.1. Thermal Buckling Analysis
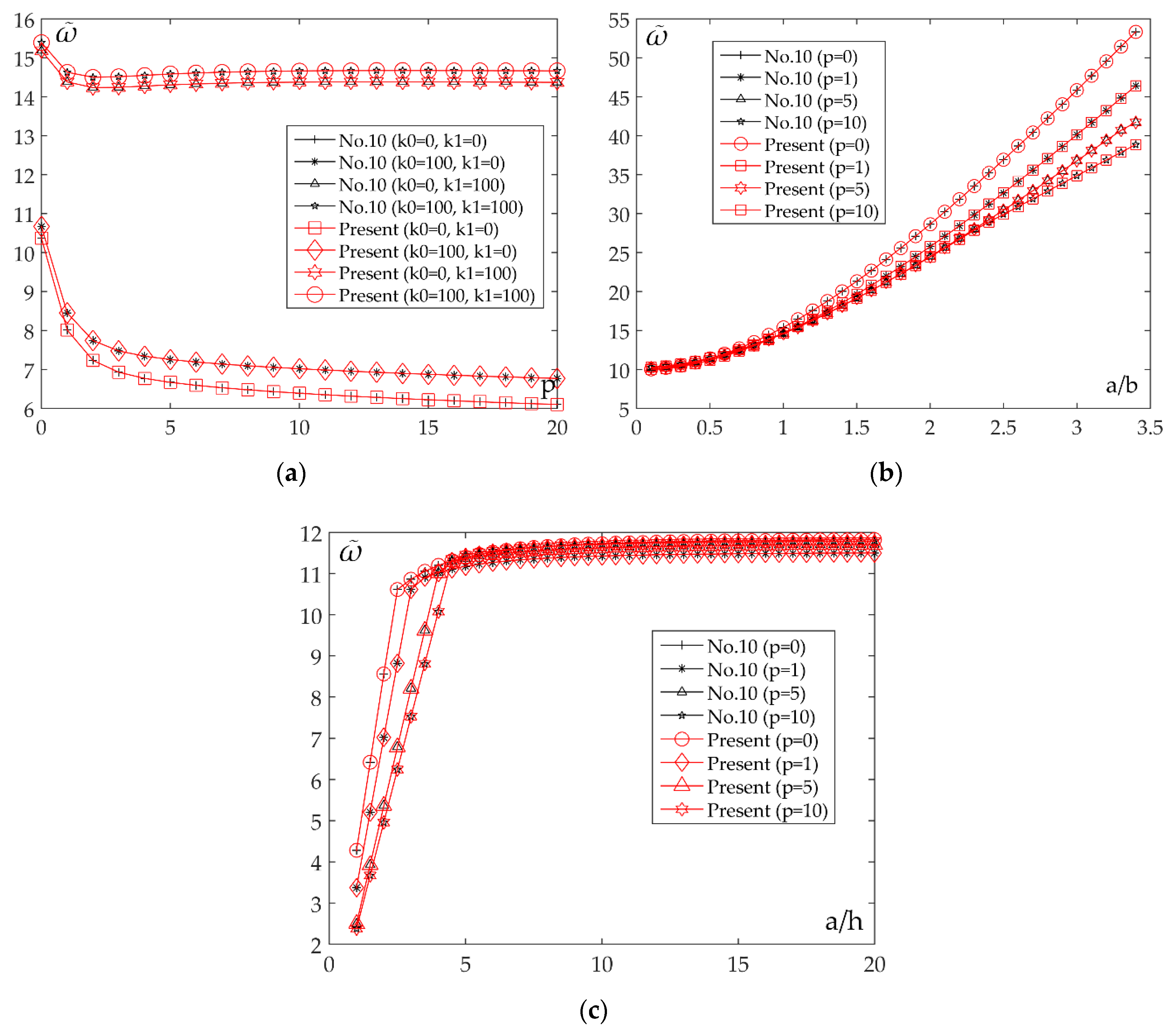
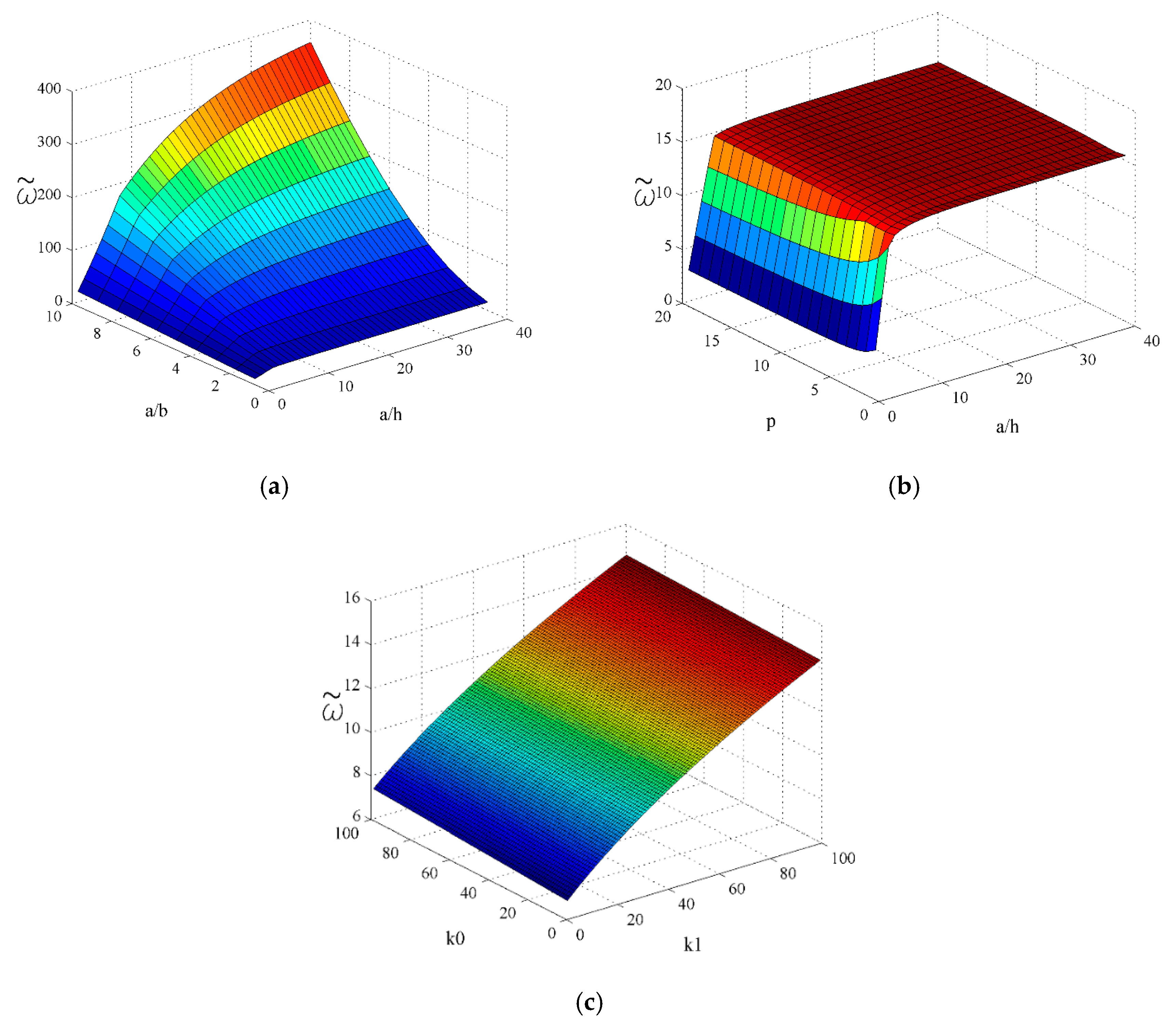
5.2. Free Vibration Analysis
6. Conclusions
- Decreasing the volume fraction of ceramics and increasing the volume fraction of metal in the FGM (the value of p index increases) decreases the value of the critical buckling temperature for both linear and nonlinear cases of temperature distribution through plate thickness
- Comparative analysis of the results for the linear and nonlinear distribution of the temperature across the plate thickness, and for other fixed parameters of the plate, it can be concluded that higher critical buckling temperatures are obtained for nonlinear distribution
- The elastic foundation effect shows that critical buckling temperature rapid rise because of the change of Pasternak coefficient k1, rather than when Winkler coefficient k0 changes
- Based on the analysis of the impact of the Winkler-Pasternak elastic foundation model parameters, similar to the thermal analysis, it was pointed out that the Pasternak coefficient k1 has a far greater influence on natural frequencies than the Winkler coefficient k0
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jha, D.K.; Kant, T.; Singh, R.K. A critical review of recent research on functionally graded plates. Compos. Struct. 2013, 96, 833–849. [Google Scholar] [CrossRef]
- Kohli, G.S.; Singh, T. Review of funtionally graded materials. J. Prod. Eng. 2015, 18, 1–4. [Google Scholar]
- Udupa, G.; Shrikantha, S.R.; Gangadharan, K.V. Functionally graded composite materials: An overview. Procedia Mater. Sci. 2014, 5, 1291–1299. [Google Scholar] [CrossRef]
- EL-Wazery, M.S.; EL-Desouky, A.R. A review on Functionally Graded Ceramic-Metal Materials. J. Mater. Environ. Sci. 2015, 6, 1369–1376. [Google Scholar]
- Thai, H.T.; Kim, S.E. A review of theories for the modeling and analysis of functionally graded plates and shells. Compos. Struct. 2015, 128, 70–86. [Google Scholar] [CrossRef]
- Swaminathan, K.; Sangeetha, D.M. Thermal analysis of FGM plates—A critical review of various modeling techniques and solution methods. Compos. Struct. 2017, 160, 43–60. [Google Scholar] [CrossRef]
- Xing, Y.; Wang, Z. Closed Form Solutions for Thermal Buckling of Functionally Graded Rectangular Thin Plates. Appl. Sci. 2017, 7, 1256. [Google Scholar] [CrossRef]
- Jouneghani, F.Z.; Dimitri, R.; Bacciocchi, M.; Tornabene, F. Free Vibration Analysis of Functionally Graded Porous Doubly-Curved Shells Based on the First-Order Shear Deformation Theory. Appl. Sci. 2017, 4, 1252. [Google Scholar] [CrossRef]
- Reddy, J.N. A simple higher-order theory for laminated composite plates. J. Appl. Mech. Trans. ASME 1984, 51, 745–752. [Google Scholar] [CrossRef]
- Phan, N.D.; Reddy, J.N. Analysis of laminated composite plates using a higher-order shear deformation theory. Int. J. Numer. Meth. Eng. 1985, 21, 2201–2219. [Google Scholar] [CrossRef]
- Reddy, J.N. Analysis of functionally graded plates. Int. J. Numer. Meth. Eng. 2000, 47, 663–684. [Google Scholar] [CrossRef]
- Yang, J.; Liew, K.M.; Kitipornchai, S. Dynamic stability of laminated FGM plates based on higher-order shear deformation theory. Comput. Mech. 2004, 33, 305–315. [Google Scholar] [CrossRef]
- Akbarzadeh, A.H.; Zad, S.H.; Eslami, M.R.; Sadighi, M. Mechanical behaviour of functionally graded plates under static and dynamic loading. Proc. Inst. Mech. Eng C J. Mech. Eng. Sci. 2011, 225, 326–333. [Google Scholar] [CrossRef]
- Zhang, D.G. Nonlinear bending analysis of FGM rectangular plates with various supported boundaries resting on two-parameter elastic foundations. Arch. Appl. Mech. 2014, 84, 1–20. [Google Scholar] [CrossRef]
- Kim, Y.W. Temperature dependent vibration analysis of functionally graded rectangular plates. J. Sound Vib. 2005, 284, 531–549. [Google Scholar] [CrossRef]
- Alibeigloo, A. Exact solution for thermo-elastic response of functionally graded rectangular plates. Compos. Struct. 2010, 92, 113–121. [Google Scholar] [CrossRef]
- Akbarzadeh, A.H.; Abbasi, M.; Eslami, M.R. Coupled thermoelasticity of functionally graded plates based on the third-order shear deformation theory. Thin-Wall Struct. 2012, 53, 141–155. [Google Scholar] [CrossRef]
- Bodaghi, M.; Saidi, A.R. Thermoelastic buckling behavior of thick functionally graded rectangular plates. Arch. Appl. Mech. 2011, 18, 1555–1572. [Google Scholar] [CrossRef]
- Bouazza, M.; Tounsi, A.; Adda-Bedia, E.A.; Megueni, A. Thermoelastic stability analysis of functionally graded plates: An analytical approach. Comp. Mater. Sci. 2010, 49, 865–870. [Google Scholar] [CrossRef]
- Khazaeinejad, P.; Usmani, A.S.; Laghrouche, O. Temperature-dependent nonlinear behaviour of thin rectangular plates exposed to through-depth thermal gradients. Compos. Struct. 2015, 132, 652–664. [Google Scholar] [CrossRef]
- Li, Q.; Iu, V.P.; Kou, K.P. Three-dimensional vibration analysis of functionally graded material plates in thermal evironment. J. Sound Vib. 2009, 324, 733–750. [Google Scholar] [CrossRef]
- Akavci, S.S.; Tanrikulu, A.H. Static and free vibration analysis of functionally graded plates based on a new quasi-3D and 2D shear deformation theories. Compos. Part B Eng. 2015, 83, 203–215. [Google Scholar] [CrossRef]
- Talha, M.; Singh, B.N. Thermo-mechanical induced vibration characteristics of shear deformable functionally graded ceramic–metal plates using finite element method. Proc. Inst. Mech. Eng C J. Mech. Eng. Sci. 2011, 225, 50–60. [Google Scholar] [CrossRef]
- Huang, Z.Y.; Lu, C.F.; Chen, W.Q. Benchmark solutions for functionally graded thick plates resting on Winkler Pasternak elastic foundations. Compos. Struct. 2008, 85, 104. [Google Scholar] [CrossRef]
- Yaghoobi, H.; Fereidoon, A. Mechanical and thermal buckling analysis of functionally graded plates resting on elastic foundations: An assessment of a simple refined nth-order shear deformation theory. Compos. Part B Eng. 2014, 62, 54–64. [Google Scholar] [CrossRef]
- Zhang, D.G.; Zhou, H.M. Mechanical and thermal post-buckling analysis of FGM rectangular plates with variou ssupported boundaries resting on nonlinear elastic foundations. Thin-Wall Struct. 2015, 89, 142–151. [Google Scholar] [CrossRef]
- Banić, D.; Bacciocchi, M.; Tornabene, F.; Ferreira, A.J.M. Influence of Winkler-Pasternak Foundation on the Vibrational Behavior of Plates and Shells Reinforced by Agglomerated Carbon Nanotubes. Appl. Sci. 2017, 7, 1228. [Google Scholar] [CrossRef]
- Correia, V.M.F.; Madeira, J.F.A.; Araújo, A.L.; Soares, C.M.M. Multiobjective optimization of ceramic-metal functionally graded plates using a higher order model. Compos. Struct. 2018, 183, 146–160. [Google Scholar] [CrossRef]
- Correia, V.M.F.; Madeira, J.F.A.; Araújo, A.L.; Soares, C.M.M. Multiobjective optimization of functionally graded material plates with thermo-mechanical loading. Compos. Struct. 2019, 207, 845–857. [Google Scholar] [CrossRef]
- Karsh, P.K.; Mukhopadhyay, T.; Dey, S. Stochastic dynamic analysis of twisted functionally graded plates. Compos. Part B Eng. 2018, 147, 259–278. [Google Scholar] [CrossRef]
- Karsh, P.K.; Mukhopadhyay, T.; Chakraborty, S.; Naskar, S.; Dey, S. A hybrid stochastic sensitivity analysis for low-frequency vibration and low-velocity impact of functionally graded plates. Compos. Part B Eng. 2019, 176, 107221. [Google Scholar] [CrossRef]
- Karsh, P.K.; Mukhopadhyay, T.; Dey, S. Stochastic low-velocity impact on functionally graded plates: Probabilistic and non-probabilistic uncertainty quantification. Compos. Part B Eng. 2019, 159, 461–480. [Google Scholar]
- Vaishali; Mukhopadhyay, T.; Karsh, P.K.; Basu, B.; Dey, S. Machine learning based stochastic dynamic analysis of functionally graded shells. Compos. Struct. 2020, 237, 111870. [Google Scholar] [CrossRef]
- Li, Y.; Yang, C.; Zhao, H.; Qu, S.; Li, X.; Li, Y. New developments of Ti-based alloys for biomedical applications. Materials 2014, 7, 1709–1800. [Google Scholar] [CrossRef] [PubMed]
- Jarrahi, A.; Shirazi, H.A.; Asnafi, A.; Ayatollahi, M.R. Biomechanical analysis of a radial functionally graded dental implant–bone system under multi-directional dynamic loads. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 249. [Google Scholar] [CrossRef]
- Niino, M.; Kisara, K.; Mori, M. Feasibility study of FGM technology in space solar power systems (SPSS). Mater. Sci. Forum. 2005, 492, 163–168. [Google Scholar] [CrossRef]
- Jojith, R.; Radhika, N. Fabrication of LM 25/WC functionally graded composite for automotive applications and investigation of its mechanical and wear properties. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 292. [Google Scholar] [CrossRef]
- Lu, L.; Chekroun, M.; Abraham, O.; Maupin, V.; Villain, G. Mechanical properties estimation of functionally graded materials using surface waves recorded with a laser interferometer. NDT E Int. 2011, 44, 169–177. [Google Scholar] [CrossRef]
- Wu, C.P.; Liu, Y.C. A review of semi-analytical numerical methods for laminated composite and multilayered functionally graded elastic/piezoelectric plates and shells. Compos. Struct. 2016, 147, 1–15. [Google Scholar] [CrossRef]
- Suresh, S.; Mortensen, A. Fundamentals of Functionally Graded Materials; IOM Communications Ltd.: London, UK, 1998. [Google Scholar]
- Ambartsumyan, A.S. On the Theory of Anisotropic Shells and Plates. In Proceedings of the Non-Homogeneity in Elasticity and Plasticity: Symposium, Warsaw, Poland, 2–9 September 1958; Olszak, W., Ed.; Pergamon Press: London, UK, 1958. [Google Scholar]
- Reissner, E.; Stavsky, Y. Bending and Stretching of Certain Types of Heterogeneous Aeolotropic Elastic Plates. J. Appl. Mech. Trans. ASME 1961, 28, 402–408. [Google Scholar] [CrossRef]
- Stein, M. Nonlinear theory for plates and shells including the effects of transverse shearing. AIAA J. 1986, 24, 1537–1544. [Google Scholar] [CrossRef]
- Mantari, J.L.; Oktem, A.S.; Soares, C.G. Bending and free vibration analysis of isotropic and multilayered plates and shells by using a new accurate higherorder shear deformation theory. Compos. Part B Eng. 2012, 43, 3348–3360. [Google Scholar] [CrossRef]
- Mantari, J.L.; Oktem, A.S.; Soares, C.G. A new trigonometric shear deformation theory for isotropic, laminated composite and sandwich plates. Int. J. Solids Struct. 2012, 49, 43–53. [Google Scholar] [CrossRef]
- Karama, M.; Afaq, K.S.; Mistou, S. Mechanical behaviour of laminated composite beam by the new multi-layered laminated composite structures model with transverse shear stress continuity. Int. J. Solids Struct. 2003, 40, 1525–1546. [Google Scholar] [CrossRef]
- Aydogdu, M. A new shear deformation theory for laminated composite plates. Compos. Struct. 2009, 89, 94–101. [Google Scholar] [CrossRef]
- Mantari, J.L.; Bonilla, E.M.; Soares, C.G. A new tangential-exponential higher order shear deformation theory for advanced composite plates. Compos. B Eng. 2014, 60, 319–328. [Google Scholar] [CrossRef]
- Meiche, N.E. A new hyperbolic shear deformation theory for buckling and vibration of functionally graded sandwich plate. Int. J. Mech. Sci. 2011, 53, 237–247. [Google Scholar] [CrossRef]
- Soldatos, K. A transverse shear deformation theory for homogeneous monoclinic plates. Acta Mech. 1992, 94, 195–220. [Google Scholar] [CrossRef]
- Akavci, S.S. Two new hyperbolic shear displacement models for orthotropic laminated composite plates. Mech. Compos. Mater. 2010, 46, 215–226. [Google Scholar] [CrossRef]
- Mechab, B.; Mechab, I.; Benaissa, S. Analysis of thick orthotropic laminated composite plates based on higher order shear deformation theory by the new function under thermo-mechanical loading. Compos. Part B Eng. 2012, 43, 1453–1458. [Google Scholar] [CrossRef]
- Praveen, G.N.; Reddy, J.N. Nonlinear transient thermoelastic analysis of functionlly graded ceramic–metal plates. Int. J. Solids Struct. 1998, 35, 4457–4476. [Google Scholar] [CrossRef]
- Reddy, J.N. Mechanics of Laminated Composite Plates and Shells: Theory and Analysis; CRC Press LLC: New York, NY, USA, 2004. [Google Scholar]
- Zenkour, A.M.; Shoby, M. Thermal buckling of functionally graded plates resting on elastic foundations using the trigonometric theory. J. Therm. Stresses 2011, 34, 1119–1138. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Function | Shape Function, f(z) |
|---|---|
| No. 1 [41] | |
| No. 2 [42] | |
| No. 3 [43] | |
| No. 4 [44] | |
| No. 5–6 [45] | |
| No. 7 [46,47] | |
| No. 8 [48] | |
| No. 9 [49] | |
| No. 10 [50] | |
| No. 11 [51] | |
| No. 12 [51] | |
| No. 13 [52] |
| Material | Material Properties | |||
|---|---|---|---|---|
| Elasticity Modulus | Poisson’s Ratio | Thermal Expansion Coefficient | Density | |
| Aluminum () | ||||
| Alumina () | ||||
| p | Source | ∆tcr | |||||
|---|---|---|---|---|---|---|---|
| k0 = 0, k1 = 0 | k0 = 10, k1 = 0 | k0 = 10, k1 = 10 | |||||
| a/h = 10 | a/h = 20 | a/h = 10 | a/h = 20 | a/h = 10 | a/h = 20 | ||
| 0 | [55] | 3.2276 | 0.833 | 3.3154 | 0.855 | 5.0479 | 1.2881 |
| [25] | 3.2273 | 0.833 | 3.3151 | 0.855 | 5.0476 | 1.2881 | |
| Present study | 3.2274 | 0.8331 | 3.3151 | 0.855 | 5.0476 | 1.2881 | |
| No. 1 | 3.2273 | 0.833 | 3.3151 | 0.855 | 5.0476 | 1.2881 | |
| No. 2 | 3.2273 | 0.833 | 3.3151 | 0.855 | 5.0476 | 1.2881 | |
| No. 3 | 3.2276 | 0.833 | 3.3154 | 0.855 | 5.0479 | 1.2881 | |
| No. 4 | 3.2333 | 0.8334 | 3.3211 | 0.8554 | 5.0536 | 1.2885 | |
| No. 5 | 3.2273 | 0.833 | 3.3151 | 0.855 | 5.0476 | 1.2881 | |
| No. 6 | 3.2282 | 0.8331 | 3.316 | 0.855 | 5.0485 | 1.2882 | |
| No. 7 | 3.2284 | 0.8331 | 3.3162 | 0.855 | 5.0487 | 1.2882 | |
| No. 8 | 3.2285 | 0.8331 | 3.3163 | 0.855 | 5.0488 | 1.2882 | |
| No. 9 | 3.2285 | 0.8331 | 3.3163 | 0.855 | 5.0488 | 1.2882 | |
| No. 10 | 3.2273 | 0.833 | 3.3151 | 0.855 | 5.0476 | 1.2881 | |
| No. 11 | 3.2288 | 0.8331 | 3.3166 | 0.8551 | 5.0491 | 1.2882 | |
| No. 12 | 3.2275 | 0.833 | 3.3152 | 0.855 | 5.0477 | 1.2881 | |
| No. 13 | 3.2273 | 0.833 | 3.3151 | 0.855 | 5.0476 | 1.2881 | |
| 1 | [55] | 1.413 | 0.3587 | 1.4897 | 0.3778 | 3.004 | 0.7564 |
| [25] | 1.4129 | 0.3587 | 1.4896 | 0.3778 | 3.0039 | 0.7564 | |
| Present study | 1.413 | 0.3587 | 1.4897 | 0.3779 | 3.0039 | 0.7564 | |
| No. 1 | 1.4129 | 0.3587 | 1.4896 | 0.3778 | 3.0039 | 0.7564 | |
| No. 2 | 1.4129 | 0.3587 | 1.4896 | 0.3778 | 3.0039 | 0.7564 | |
| No. 3 | 1.413 | 0.3587 | 1.4897 | 0.3778 | 3.004 | 0.7564 | |
| No. 4 | 1.4152 | 0.3588 | 1.4919 | 0.378 | 3.0061 | 0.7565 | |
| No. 5 | 1.4129 | 0.3587 | 1.4896 | 0.3778 | 3.0039 | 0.7564 | |
| No. 6 | 1.4133 | 0.3587 | 1.49 | 0.3779 | 3.0042 | 0.7564 | |
| No. 7 | 1.4133 | 0.3587 | 1.49 | 0.3779 | 3.0043 | 0.7564 | |
| No. 8 | 1.4134 | 0.3587 | 1.4901 | 0.3779 | 3.0043 | 0.7564 | |
| No. 9 | 1.4134 | 0.3587 | 1.4901 | 0.3779 | 3.0043 | 0.7564 | |
| No. 10 | 1.4129 | 0.3587 | 1.4896 | 0.3778 | 3.0039 | 0.7564 | |
| No. 11 | 1.4135 | 0.3587 | 1.4902 | 0.3779 | 3.0044 | 0.7564 | |
| No. 12 | 1.413 | 0.3587 | 1.4897 | 0.3778 | 3.0039 | 0.7564 | |
| No. 13 | 1.4129 | 0.3587 | 1.4896 | 0.3778 | 3.0039 | 0.7564 | |
| 5 | [55] | 1.16 | 0.2986 | 1.2576 | 0.323 | 3.1839 | 0.8046 |
| [25] | 1.1606 | 0.2987 | 1.2582 | 0.3231 | 3.1845 | 0.8046 | |
| Present study | 1.1608 | 0.2987 | 1.2584 | 0.3231 | 3.1846 | 0.8047 | |
| No. 1 | 1.1606 | 0.2987 | 1.2582 | 0.3231 | 3.1845 | 0.8046 | |
| No. 2 | 1.1606 | 0.2987 | 1.2582 | 0.3231 | 3.1845 | 0.8046 | |
| No. 3 | 1.16 | 0.2986 | 1.2576 | 0.323 | 3.1839 | 0.8046 | |
| No. 4 | 1.1604 | 0.2986 | 1.2579 | 0.323 | 3.1842 | 0.8046 | |
| No. 5 | 1.1607 | 0.2987 | 1.2582 | 0.3231 | 3.1845 | 0.8046 | |
| No. 6 | 1.1626 | 0.2988 | 1.2602 | 0.3232 | 3.1865 | 0.8048 | |
| No. 7 | 1.1597 | 0.2986 | 1.2573 | 0.323 | 3.1835 | 0.8045 | |
| No. 8 | 1.1597 | 0.2986 | 1.2572 | 0.323 | 3.1835 | 0.8045 | |
| No. 9 | 1.1597 | 0.2986 | 1.2572 | 0.323 | 3.1835 | 0.8045 | |
| No. 10 | 1.1607 | 0.2987 | 1.2583 | 0.3231 | 3.1846 | 0.8046 | |
| No. 11 | 1.1631 | 0.2988 | 1.2607 | 0.3232 | 3.187 | 0.8048 | |
| No. 12 | 1.1602 | 0.2986 | 1.2578 | 0.323 | 3.184 | 0.8046 | |
| No. 13 | 1.1606 | 0.2987 | 1.2582 | 0.323 | 3.1844 | 0.8046 | |
| 10 | [55] | 1.2183 | 0.3156 | 1.3317 | 0.344 | 3.5699 | 0.9035 |
| [25] | 1.2186 | 0.3156 | 1.332 | 0.344 | 3.5701 | 0.9035 | |
| Present study | 1.2187 | 0.3157 | 1.3321 | 0.344 | 3.5703 | 0.9036 | |
| No. 1 | 1.2186 | 0.3156 | 1.332 | 0.344 | 3.5701 | 0.9035 | |
| No. 2 | 1.2186 | 0.3156 | 1.332 | 0.344 | 3.5701 | 0.9035 | |
| No. 3 | 1.2183 | 0.3156 | 1.3317 | 0.344 | 3.5699 | 0.9035 | |
| No. 4 | 1.2206 | 0.3158 | 1.3339 | 0.3441 | 3.5721 | 0.9037 | |
| No. 5 | 1.2186 | 0.3156 | 1.332 | 0.344 | 3.5702 | 0.9035 | |
| No. 6 | 1.2201 | 0.3157 | 1.3335 | 0.3441 | 3.5717 | 0.9036 | |
| No. 7 | 1.2184 | 0.3156 | 1.3318 | 0.344 | 3.57 | 0.9035 | |
| No. 8 | 1.2185 | 0.3156 | 1.3318 | 0.344 | 3.57 | 0.9035 | |
| No. 9 | 1.2185 | 0.3156 | 1.3318 | 0.344 | 3.57 | 0.9035 | |
| No. 10 | 1.2186 | 0.3156 | 1.332 | 0.344 | 3.5702 | 0.9035 | |
| No. 11 | 1.2203 | 0.3158 | 1.3337 | 0.3441 | 3.5719 | 0.9036 | |
| No. 12 | 1.2184 | 0.3156 | 1.3318 | 0.344 | 3.5699 | 0.9035 | |
| No. 13 | 1.2186 | 0.3156 | 1.3319 | 0.344 | 3.5701 | 0.9035 | |
| p | Source | ∆tcr | |||||
|---|---|---|---|---|---|---|---|
| k0 = 0, k1 = 0 | k0 = 10, k1 = 0 | k0 = 10, k1 = 10 | |||||
| a/h = 10 | a/h = 20 | a/h = 10 | a/h = 20 | a/h = 10 | a/h = 20 | ||
| 0 | [55] | 6.4552 | 1.6661 | 6.6308 | 1.71 | 10.0958 | 2.5763 |
| Present study | 6.4547 | 1.6661 | 6.6303 | 1.71 | 10.0953 | 2.5763 | |
| No. 1 | 6.4547 | 1.6661 | 6.6302 | 1.71 | 10.0953 | 2.5762 | |
| No. 2 | 6.4547 | 1.6661 | 6.6302 | 1.71 | 10.0953 | 2.5762 | |
| No. 3 | 6.4552 | 1.6661 | 6.6308 | 1.71 | 10.0958 | 2.5763 | |
| No. 4 | 6.4667 | 1.6669 | 6.6422 | 1.7108 | 10.1073 | 2.577 | |
| No. 5 | 6.4547 | 1.6661 | 6.6302 | 1.7182 | 10.0953 | 2.5762 | |
| No. 6 | 6.4564 | 1.6662 | 6.632 | 1.71 | 10.097 | 2.5764 | |
| No. 7 | 6.4569 | 1.6662 | 6.6324 | 1.7101 | 10.0974 | 2.5764 | |
| No. 8 | 6.4571 | 1.6663 | 6.6326 | 1.7101 | 10.0977 | 2.5764 | |
| No. 9 | 6.4571 | 1.6663 | 6.6326 | 1.7101 | 10.0977 | 2.5764 | |
| No. 10 | 6.4547 | 1.6661 | 6.6302 | 1.7101 | 10.0953 | 2.5762 | |
| No. 11 | 6.4577 | 1.6663 | 6.6332 | 1.7139 | 10.0983 | 2.5764 | |
| No. 12 | 6.455 | 1.6661 | 6.6305 | 1.7102 | 10.0956 | 2.5762 | |
| No. 13 | 6.4547 | 1.6661 | 6.6302 | 1.71 | 10.0953 | 2.5762 | |
| 1 | [55] | 2.8269 | 0.7176 | 2.9804 | 0.756 | 6.0097 | 1.5133 |
| Present study | 2.8268 | 0.7176 | 2.9802 | 0.756 | 6.0096 | 1.5133 | |
| No. 1 | 2.8267 | 0.7176 | 2.9802 | 0.7559 | 6.0095 | 1.5133 | |
| No. 2 | 2.8267 | 0.7176 | 2.9802 | 0.7559 | 6.0095 | 1.5133 | |
| No. 3 | 2.8269 | 0.7176 | 2.9804 | 0.756 | 6.0097 | 1.5133 | |
| No. 4 | 2.8312 | 0.7179 | 2.9847 | 0.7562 | 6.014 | 1.5136 | |
| No. 5 | 2.8267 | 0.7176 | 2.9802 | 0.7559 | 6.0095 | 1.5133 | |
| No. 6 | 2.8274 | 0.7176 | 2.9808 | 0.756 | 6.0102 | 1.5133 | |
| No. 7 | 2.8275 | 0.7176 | 2.981 | 0.756 | 6.0103 | 1.5133 | |
| No. 8 | 2.8276 | 0.7176 | 2.9811 | 0.756 | 6.0104 | 1.5133 | |
| No. 9 | 2.8276 | 0.7176 | 2.9811 | 0.756 | 6.0104 | 1.5133 | |
| No. 10 | 2.8267 | 0.7176 | 2.9802 | 0.7559 | 6.0095 | 1.5133 | |
| No. 11 | 2.8278 | 0.7177 | 2.9813 | 0.756 | 6.0106 | 1.5134 | |
| No. 12 | 2.8268 | 0.7176 | 2.9803 | 0.756 | 6.0096 | 1.5133 | |
| No. 13 | 2.8267 | 0.7176 | 2.9802 | 0.7559 | 6.0095 | 1.5133 | |
| 5 | [55] | 2.0152 | 0.5188 | 2.1847 | 0.5612 | 5.5309 | 1.3977 |
| Present study | 2.0165 | 0.5189 | 2.186 | 0.5613 | 5.5322 | 1.3978 | |
| No. 1 | 2.0162 | 0.5188 | 2.1858 | 0.5612 | 5.5319 | 1.3978 | |
| No. 2 | 2.0162 | 0.5188 | 2.1858 | 0.5612 | 5.5319 | 1.3978 | |
| No. 3 | 2.0152 | 0.5188 | 2.1847 | 0.5611 | 5.5309 | 1.3977 | |
| No. 4 | 2.0157 | 0.5188 | 2.1853 | 0.5612 | 5.5315 | 1.3977 | |
| No. 5 | 2.0163 | 0.5188 | 2.1858 | 0.5612 | 5.532 | 1.3978 | |
| No. 6 | 2.0197 | 0.5191 | 2.1892 | 0.5615 | 5.5354 | 1.398 | |
| No. 7 | 2.0146 | 0.5187 | 2.1841 | 0.5611 | 5.5303 | 1.3977 | |
| No. 8 | 2.0145 | 0.5187 | 2.1841 | 0.5611 | 5.5302 | 1.3977 | |
| No. 9 | 2.0145 | 0.5187 | 2.1841 | 0.5611 | 5.5302 | 1.3977 | |
| No. 10 | 2.0164 | 0.5189 | 2.1859 | 0.5612 | 5.5321 | 1.3978 | |
| No. 11 | 2.0206 | 0.5191 | 2.1901 | 0.5615 | 5.5363 | 1.3981 | |
| No. 12 | 2.0154 | 0.5188 | 2.1849 | 0.5612 | 5.5311 | 1.3977 | |
| No. 13 | 2.0161 | 0.5188 | 2.1856 | 0.5612 | 5.5318 | 1.3978 | |
| 10 | [55] | 2.0971 | 0.5433 | 2.2923 | 0.5921 | 6.1448 | 1.5552 |
| Present study | 2.0978 | 0.5434 | 2.2929 | 0.5922 | 6.1455 | 1.5553 | |
| No. 1 | 2.0976 | 0.5433 | 2.2928 | 0.5921 | 6.1453 | 1.5553 | |
| No. 2 | 2.0976 | 0.5433 | 2.2928 | 0.5921 | 6.1453 | 1.5553 | |
| No. 3 | 2.0971 | 0.5433 | 2.2923 | 0.5921 | 6.1448 | 1.5552 | |
| No. 4 | 2.101 | 0.5436 | 2.2961 | 0.5924 | 6.1487 | 1.5555 | |
| No. 5 | 2.0976 | 0.5433 | 2.2928 | 0.5921 | 6.1453 | 1.5553 | |
| No. 6 | 2.1002 | 0.5435 | 2.2954 | 0.5923 | 6.1479 | 1.5554 | |
| No. 7 | 2.0973 | 0.5433 | 2.2925 | 0.5921 | 6.145 | 1.5552 | |
| No. 8 | 2.0973 | 0.5433 | 2.2925 | 0.5921 | 6.145 | 1.5552 | |
| No. 9 | 2.0973 | 0.5433 | 2.2925 | 0.5921 | 6.145 | 1.5552 | |
| No. 10 | 2.0977 | 0.5433 | 2.2928 | 0.5921 | 6.1454 | 1.5553 | |
| No. 11 | 2.1005 | 0.5435 | 2.2957 | 0.5923 | 6.1482 | 1.5555 | |
| No. 12 | 2.0972 | 0.5433 | 2.2924 | 0.5921 | 6.1449 | 1.5552 | |
| No. 13 | 2.0975 | 0.5433 | 2.2927 | 0.5921 | 6.1452 | 1.5553 | |
| a/b | k0 | k1 | Theory | ||||
|---|---|---|---|---|---|---|---|
| a/h = 5 | |||||||
| p = 0 | p = 1 | p = 5 | p = 10 | ||||
| 0.5 | 0 | 0 | Present study | 6.761 | 5.2016 | 4.3761 | 4.206 |
| No. 1 | 6.7609 | 5.2015 | 4.3757 | 4.2058 | |||
| No. 2 | 6.7609 | 5.2015 | 4.3757 | 4.2058 | |||
| No. 3 | 6.7616 | 5.202 | 4.3733 | 4.205 | |||
| No. 4 | 6.775 | 5.2108 | 4.3753 | 4.2136 | |||
| No. 5 | 6.7609 | 5.2015 | 4.3757 | 4.2058 | |||
| No. 6 | 6.7628 | 5.2027 | 4.3832 | 4.211 | |||
| No. 7 | 6.7636 | 5.2033 | 4.3722 | 4.2055 | |||
| No. 8 | 6.7638 | 5.2034 | 4.3721 | 4.2056 | |||
| No. 9 | 6.7638 | 5.2034 | 4.3721 | 4.2056 | |||
| No. 10 | 6.7609 | 5.2015 | 4.3759 | 4.2059 | |||
| No. 11 | 6.7642 | 5.2036 | 4.3852 | 4.2117 | |||
| No. 12 | 6.8031 | 5.2291 | 4.4434 | 4.2771 | |||
| No. 13 | 6.7609 | 5.2015 | 4.3754 | 4.2056 | |||
| 100 | 0 | Present study | 7.2125 | 5.8654 | 5.2358 | 5.1214 | |
| No. 1 | 7.2125 | 5.8653 | 5.2354 | 5.1211 | |||
| No. 2 | 7.2125 | 5.8653 | 5.2354 | 5.1211 | |||
| No. 3 | 7.2132 | 5.8657 | 5.2336 | 5.1205 | |||
| No. 4 | 7.2256 | 5.8734 | 5.2353 | 5.1274 | |||
| No. 5 | 7.2125 | 5.8653 | 5.2355 | 5.1212 | |||
| No. 6 | 7.2142 | 5.8664 | 5.2415 | 5.1252 | |||
| No. 7 | 7.215 | 5.8668 | 5.2327 | 5.1209 | |||
| No. 8 | 7.2152 | 5.867 | 5.2326 | 5.121 | |||
| No. 9 | 7.2152 | 5.867 | 5.2326 | 5.121 | |||
| No. 10 | 7.2125 | 5.8653 | 5.2357 | 5.1212 | |||
| No. 11 | 7.2155 | 5.8672 | 5.2431 | 5.1258 | |||
| No. 12 | 7.2517 | 5.8893 | 5.2902 | 5.1777 | |||
| No. 13 | 7.2125 | 5.8653 | 5.2352 | 5.121 | |||
| 0 | 100 | Present study | 11.115 | 10.845 | 10.992 | 11.079 | |
| No. 1 | 11.115 | 10.845 | 10.9919 | 11.0793 | |||
| No. 2 | 11.115 | 10.845 | 10.9919 | 11.0793 | |||
| No. 3 | 11.1154 | 10.8452 | 10.9914 | 11.0791 | |||
| No. 4 | 11.1226 | 10.8484 | 10.9922 | 11.0814 | |||
| No. 5 | 11.115 | 10.845 | 10.9919 | 11.0793 | |||
| No. 6 | 11.116 | 10.8455 | 10.9936 | 11.0803 | |||
| No. 7 | 11.1164 | 10.8457 | 10.9912 | 11.0793 | |||
| No. 8 | 11.1166 | 10.8457 | 10.9912 | 11.0794 | |||
| No. 9 | 11.1166 | 10.8457 | 10.9912 | 11.0794 | |||
| No. 10 | 11.115 | 10.845 | 10.992 | 11.0793 | |||
| No. 11 | 11.1168 | 10.8458 | 10.994 | 11.0804 | |||
| No. 12 | 11.138 | 10.8552 | 11.0077 | 11.0949 | |||
| No. 13 | 11.115 | 10.845 | 10.9918 | 11.0792 | |||
| 100 | 100 | Present study | 11.395 | 11.178 | 11.3593 | 11.4558 | |
| No. 1 | 11.3952 | 11.178 | 11.3593 | 11.4558 | |||
| No. 2 | 11.3952 | 11.178 | 11.3593 | 11.4558 | |||
| No. 3 | 11.3956 | 11.1782 | 11.3588 | 11.4557 | |||
| No. 4 | 11.4026 | 11.1812 | 11.3596 | 11.4578 | |||
| No. 5 | 11.3952 | 11.178 | 11.3593 | 11.4558 | |||
| No. 6 | 11.3962 | 11.1784 | 11.3608 | 11.4567 | |||
| No. 7 | 11.3966 | 11.1786 | 11.3587 | 11.4559 | |||
| No. 8 | 11.3967 | 11.1787 | 11.3587 | 11.4559 | |||
| No. 9 | 11.3967 | 11.1787 | 11.3587 | 11.4559 | |||
| No. 10 | 11.3952 | 11.178 | 11.3593 | 11.4558 | |||
| No. 11 | 11.3969 | 11.1787 | 11.3612 | 11.4568 | |||
| No. 12 | 11.4174 | 11.1876 | 11.3737 | 11.47 | |||
| No. 13 | 11.3952 | 11.178 | 11.3592 | 11.4557 | |||
| a/b | k0 | k1 | Theory | ||||
|---|---|---|---|---|---|---|---|
| a/h = 5 | |||||||
| p = 0 | p = 1 | p = 5 | p = 0 | ||||
| 1 | 0 | 0 | Present study | 10.3761 | 8.0121 | 6.6687 | 6.3883 |
| No. 1 | 10.3761 | 8.0121 | 6.6677 | 6.3879 | |||
| No. 2 | 10.3761 | 8.0121 | 6.6677 | 6.3879 | |||
| No. 3 | 10.3779 | 8.0133 | 6.663 | 6.3864 | |||
| No. 4 | 10.4086 | 8.0336 | 6.6684 | 6.4062 | |||
| No. 5 | 10.3761 | 8.0121 | 6.6679 | 6.3879 | |||
| No. 6 | 10.38 | 8.0147 | 6.6838 | 6.3987 | |||
| No. 7 | 10.3824 | 8.0163 | 6.6607 | 6.3877 | |||
| No. 8 | 10.3831 | 8.0167 | 6.6606 | 6.388 | |||
| No. 9 | 10.3831 | 8.0167 | 6.6606 | 6.388 | |||
| No. 10 | 10.3761 | 8.0121 | 6.6683 | 6.3881 | |||
| No. 11 | 10.383 | 8.0166 | 6.6881 | 6.4001 | |||
| No. 12 | 10.4698 | 8.0739 | 6.8155 | 6.5423 | |||
| No. 13 | 10.3762 | 8.0122 | 6.6672 | 6.3876 | |||
| 100 | 0 | Present study | 10.6722 | 8.4517 | 7.2542 | 7.0179 | |
| No. 1 | 10.6723 | 8.4517 | 7.2534 | 7.0175 | |||
| No. 2 | 10.6723 | 8.4517 | 7.2534 | 7.0175 | |||
| No. 3 | 10.674 | 8.4528 | 7.2491 | 7.0162 | |||
| No. 4 | 10.7037 | 8.4718 | 7.2541 | 7.0339 | |||
| No. 5 | 10.6722 | 8.4517 | 7.2535 | 7.0176 | |||
| No. 6 | 10.676 | 8.4541 | 7.2678 | 7.0271 | |||
| No. 7 | 10.6783 | 8.4556 | 7.2471 | 7.0174 | |||
| No. 8 | 10.679 | 8.456 | 7.247 | 7.0177 | |||
| No. 9 | 10.679 | 8.456 | 7.247 | 7.0177 | |||
| No. 10 | 10.6722 | 8.4517 | 7.2539 | 7.0177 | |||
| No. 11 | 10.6789 | 8.4559 | 7.2717 | 7.0284 | |||
| No. 12 | 10.7629 | 8.5096 | 7.3865 | 7.1553 | |||
| No. 13 | 10.6723 | 8.4517 | 7.2529 | 7.0173 | |||
| 0 | 100 | Present study | 15.1867 | 14.3818 | 14.3054 | 14.376 | |
| No. 1 | 15.1867 | 14.3818 | 14.3052 | 14.3759 | |||
| No. 2 | 15.1867 | 14.3818 | 14.3052 | 14.3759 | |||
| No. 3 | 15.1878 | 14.3823 | 14.304 | 14.3757 | |||
| No. 4 | 15.2066 | 14.391 | 14.3064 | 14.3818 | |||
| No. 5 | 15.1867 | 14.3818 | 14.3052 | 14.376 | |||
| No. 6 | 15.1891 | 14.3829 | 14.3094 | 14.3785 | |||
| No. 7 | 15.1906 | 14.3836 | 14.3036 | 14.3763 | |||
| No. 8 | 15.191 | 14.3838 | 14.3036 | 14.3764 | |||
| No. 9 | 15.191 | 14.3838 | 14.3036 | 14.3764 | |||
| No. 10 | 15.1867 | 14.3818 | 14.3053 | 14.376 | |||
| No. 11 | 15.191 | 14.3838 | 14.3105 | 14.3788 | |||
| No. 12 | 15.2444 | 14.4086 | 14.3463 | 14.4167 | |||
| No. 13 | 15.1868 | 14.3818 | 14.305 | 14.3759 | |||
| 100 | 100 | Present study | 15.3904 | 14.6304 | 14.5846 | 14.6636 | |
| No. 1 | 15.3904 | 14.6305 | 14.5843 | 14.6636 | |||
| No. 2 | 15.3904 | 14.6305 | 14.5843 | 14.6636 | |||
| No. 3 | 15.3914 | 14.6309 | 14.5833 | 14.6634 | |||
| No. 4 | 15.4099 | 14.6394 | 14.5856 | 14.6692 | |||
| No. 5 | 15.3904 | 14.6305 | 14.5844 | 14.6636 | |||
| No. 6 | 15.3927 | 14.6315 | 14.5883 | 14.666 | |||
| No. 7 | 15.3941 | 14.6322 | 14.5829 | 14.6639 | |||
| No. 8 | 15.3945 | 14.6323 | 14.5829 | 14.664 | |||
| No. 9 | 15.3945 | 14.6323 | 14.5829 | 14.664 | |||
| No. 10 | 15.3904 | 14.6305 | 14.5845 | 14.6636 | |||
| No. 11 | 15.3945 | 14.6324 | 14.5894 | 14.6663 | |||
| No. 12 | 15.447 | 14.6564 | 14.6233 | 14.7021 | |||
| No. 13 | 15.3904 | 14.6305 | 14.5842 | 14.6635 | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Radaković, A.; Čukanović, D.; Bogdanović, G.; Blagojević, M.; Stojanović, B.; Dragović, D.; Manić, N. Thermal Buckling and Free Vibration Analysis of Functionally Graded Plate Resting on an Elastic Foundation According to High Order Shear Deformation Theory Based on New Shape Function. Appl. Sci. 2020, 10, 4190. https://doi.org/10.3390/app10124190
Radaković A, Čukanović D, Bogdanović G, Blagojević M, Stojanović B, Dragović D, Manić N. Thermal Buckling and Free Vibration Analysis of Functionally Graded Plate Resting on an Elastic Foundation According to High Order Shear Deformation Theory Based on New Shape Function. Applied Sciences. 2020; 10(12):4190. https://doi.org/10.3390/app10124190
Chicago/Turabian StyleRadaković, Aleksandar, Dragan Čukanović, Gordana Bogdanović, Milan Blagojević, Blaža Stojanović, Danilo Dragović, and Nazim Manić. 2020. "Thermal Buckling and Free Vibration Analysis of Functionally Graded Plate Resting on an Elastic Foundation According to High Order Shear Deformation Theory Based on New Shape Function" Applied Sciences 10, no. 12: 4190. https://doi.org/10.3390/app10124190
APA StyleRadaković, A., Čukanović, D., Bogdanović, G., Blagojević, M., Stojanović, B., Dragović, D., & Manić, N. (2020). Thermal Buckling and Free Vibration Analysis of Functionally Graded Plate Resting on an Elastic Foundation According to High Order Shear Deformation Theory Based on New Shape Function. Applied Sciences, 10(12), 4190. https://doi.org/10.3390/app10124190