Deformation Characteristics and Control Method of Kilometer-Depth Roadways in a Nickel Mine: A Case Study

Abstract
1. Introduction
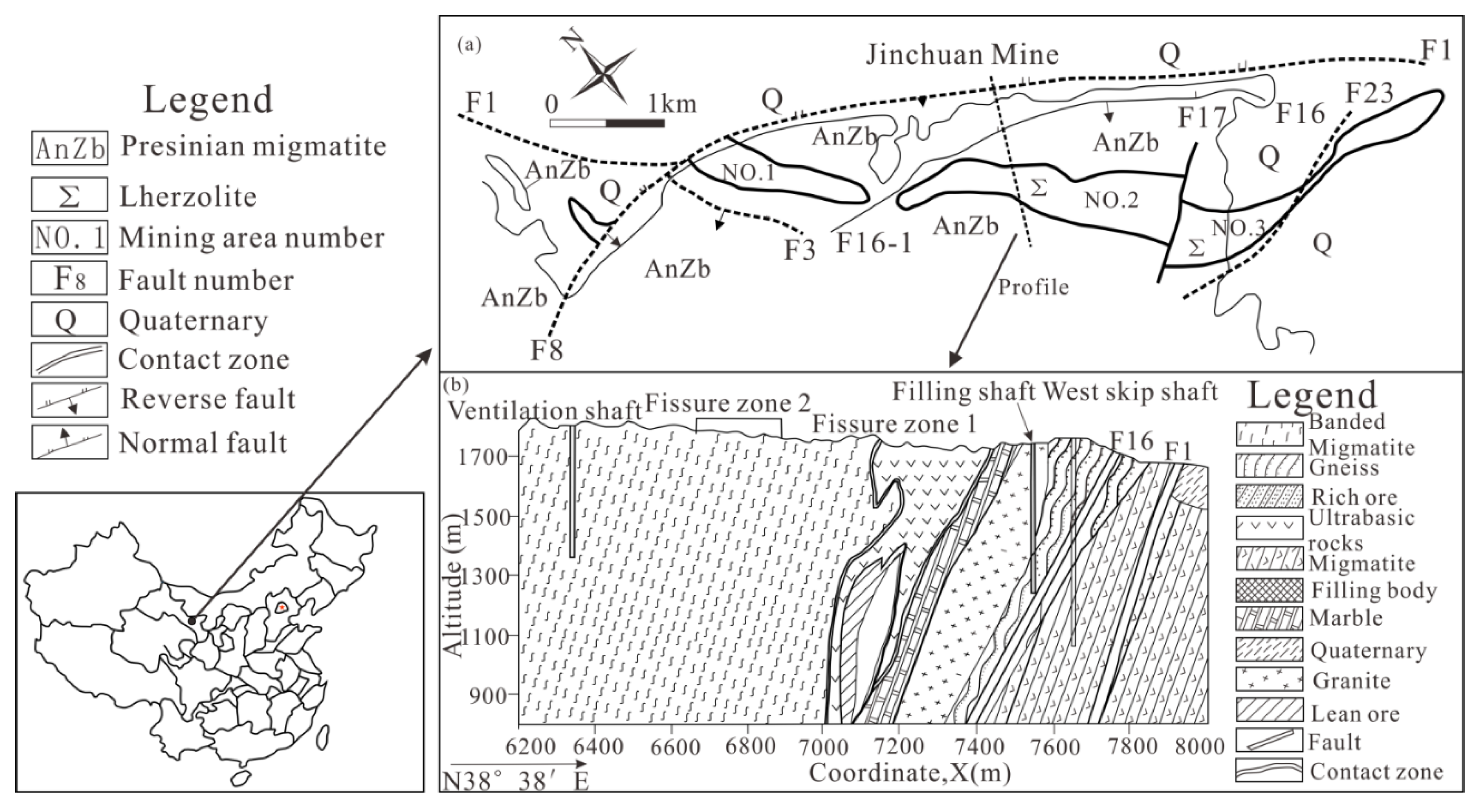
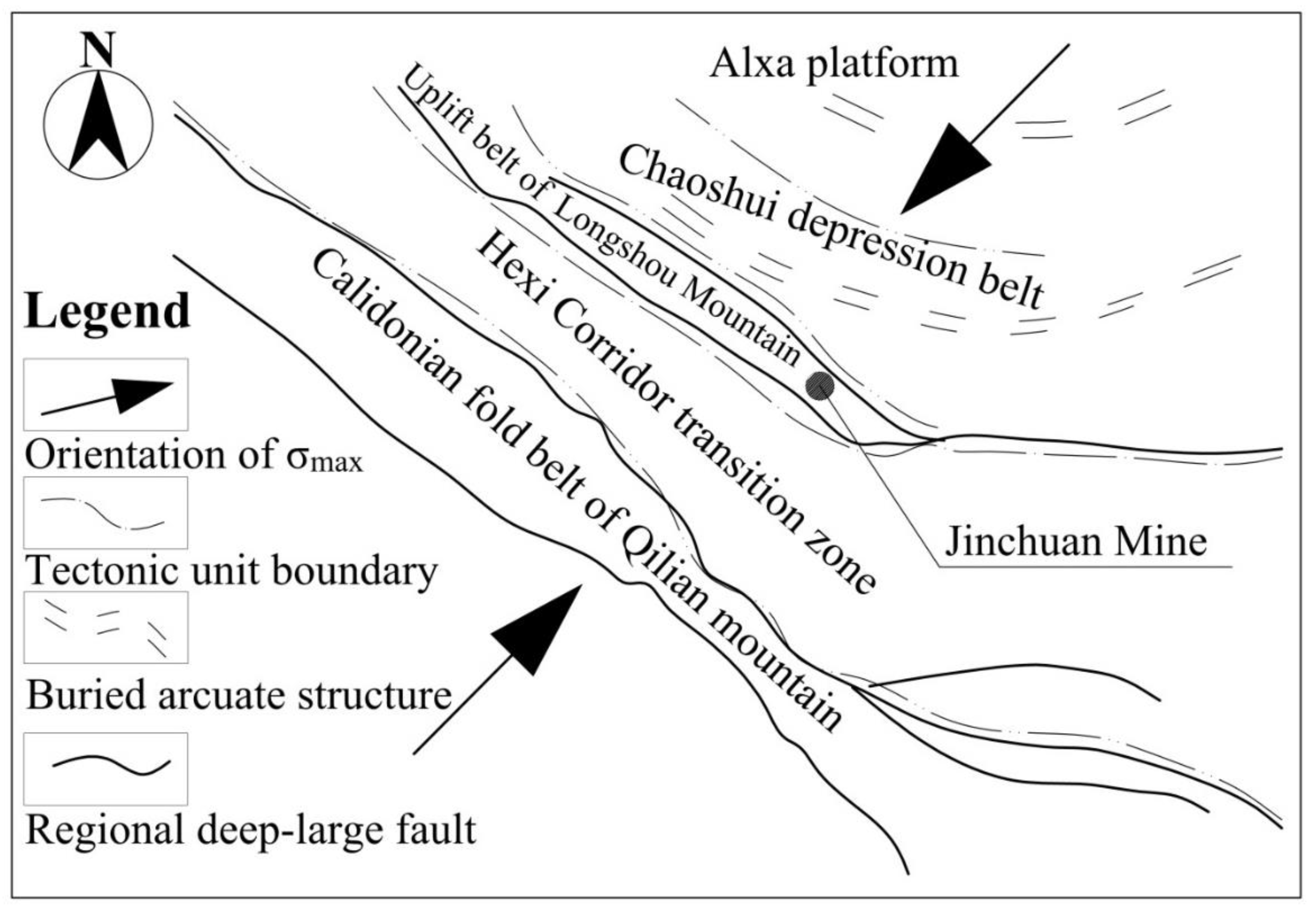
2. Geological Environment and Engineering Properties
3. Roadway Deformation Characteristics
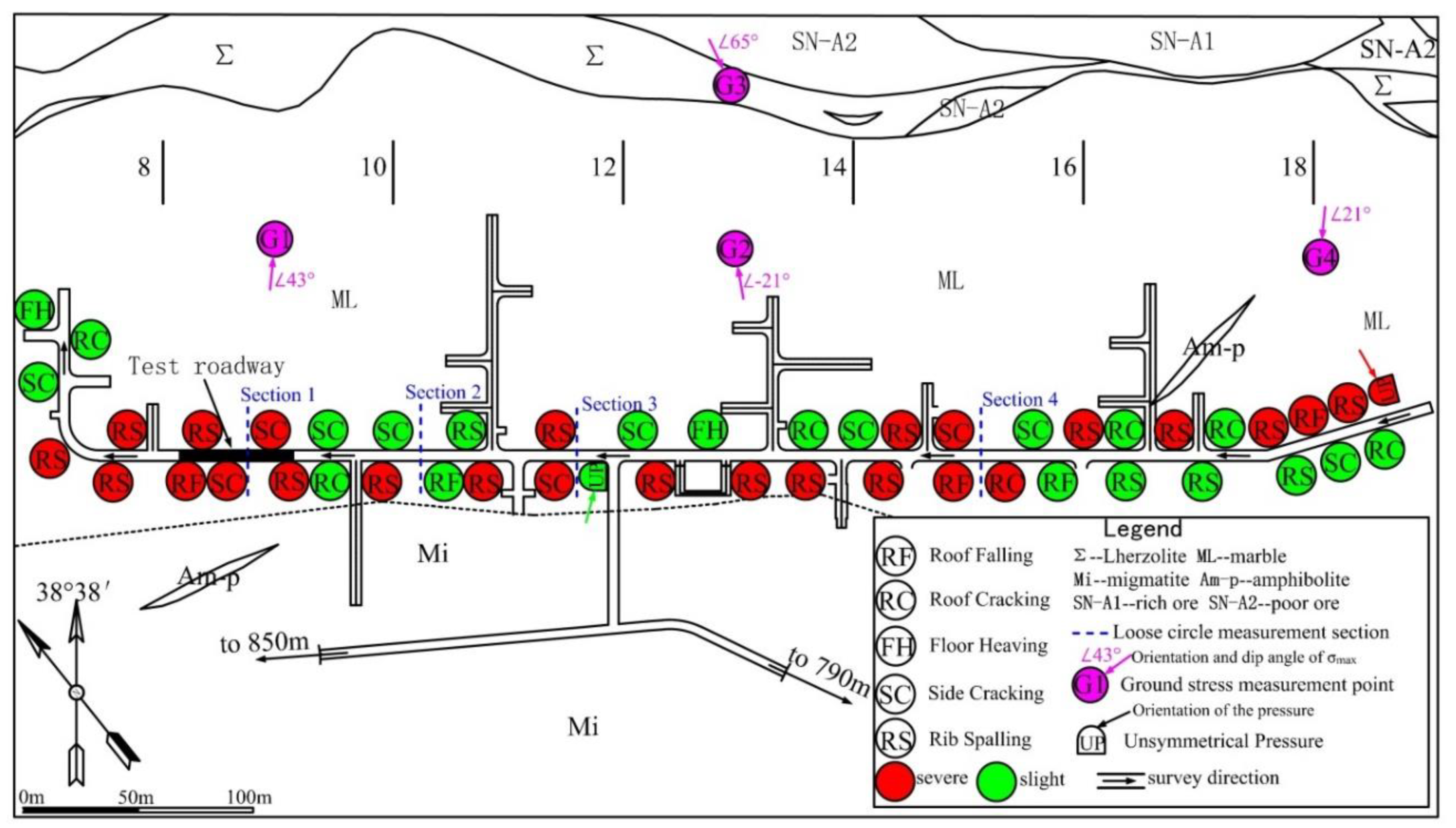
3.1. Field Test
3.2. Deformation Characteristics of Roadways
3.2.1. Maximum Principal Stress Plays a Dominant Role
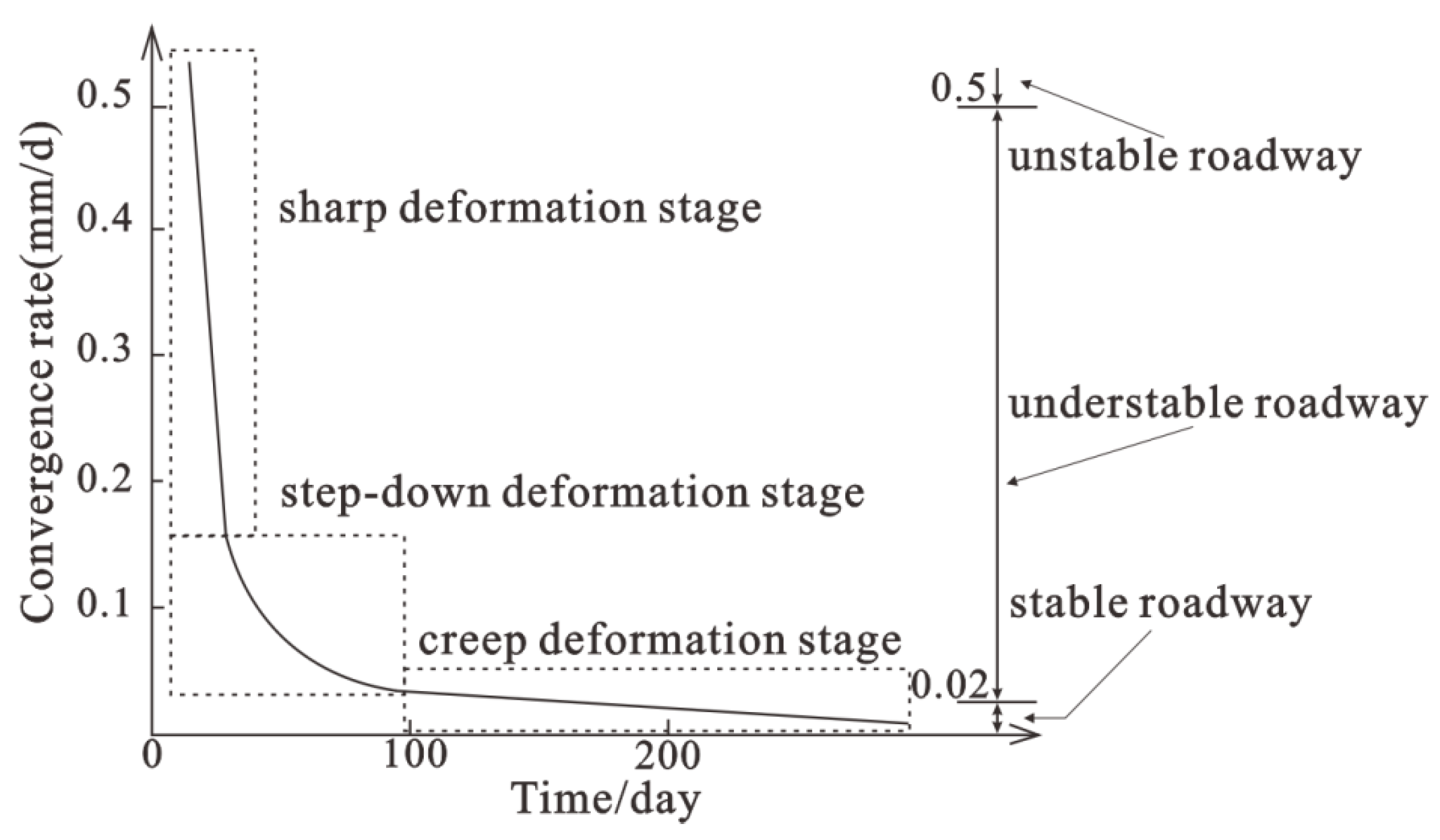
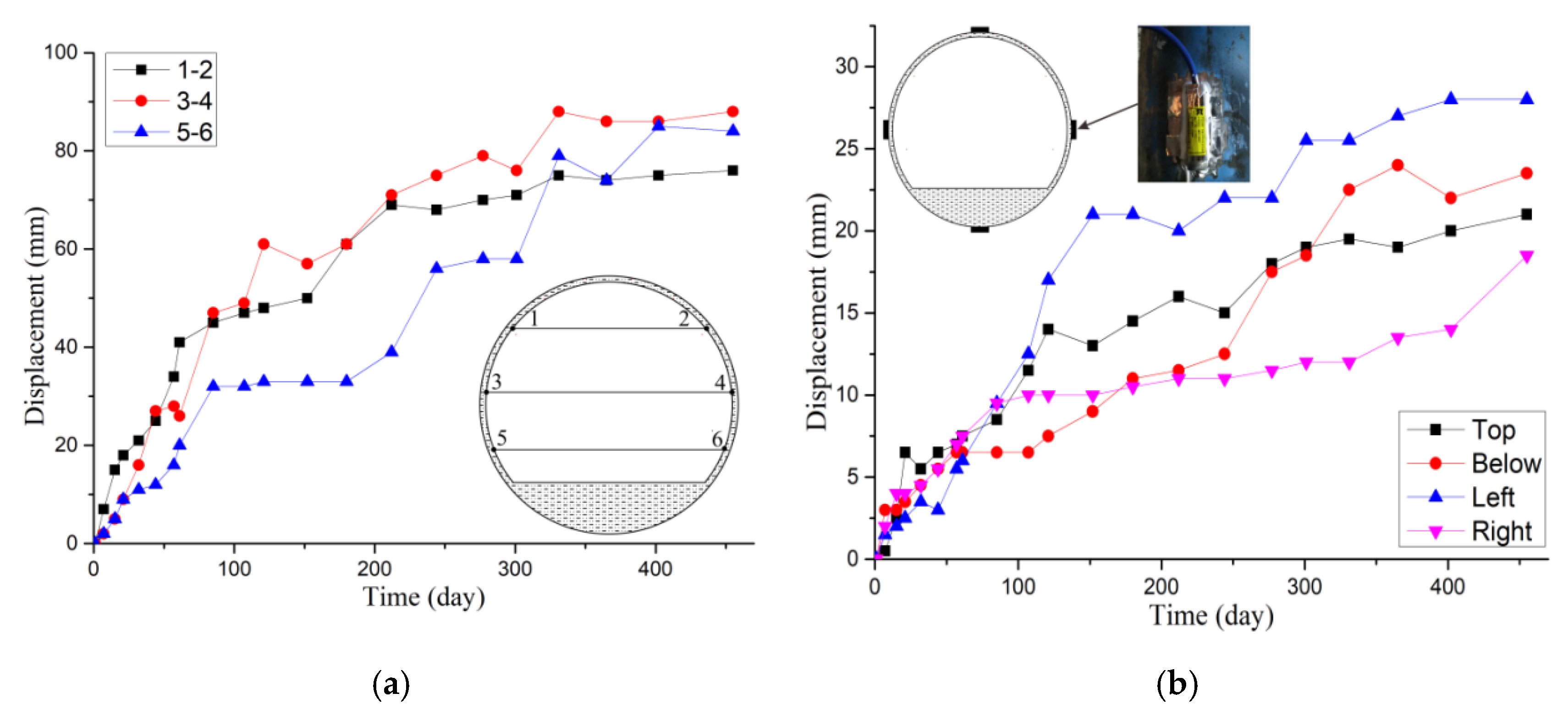
3.2.2. Prominent Time Effects
3.2.3. Significant Space Effects
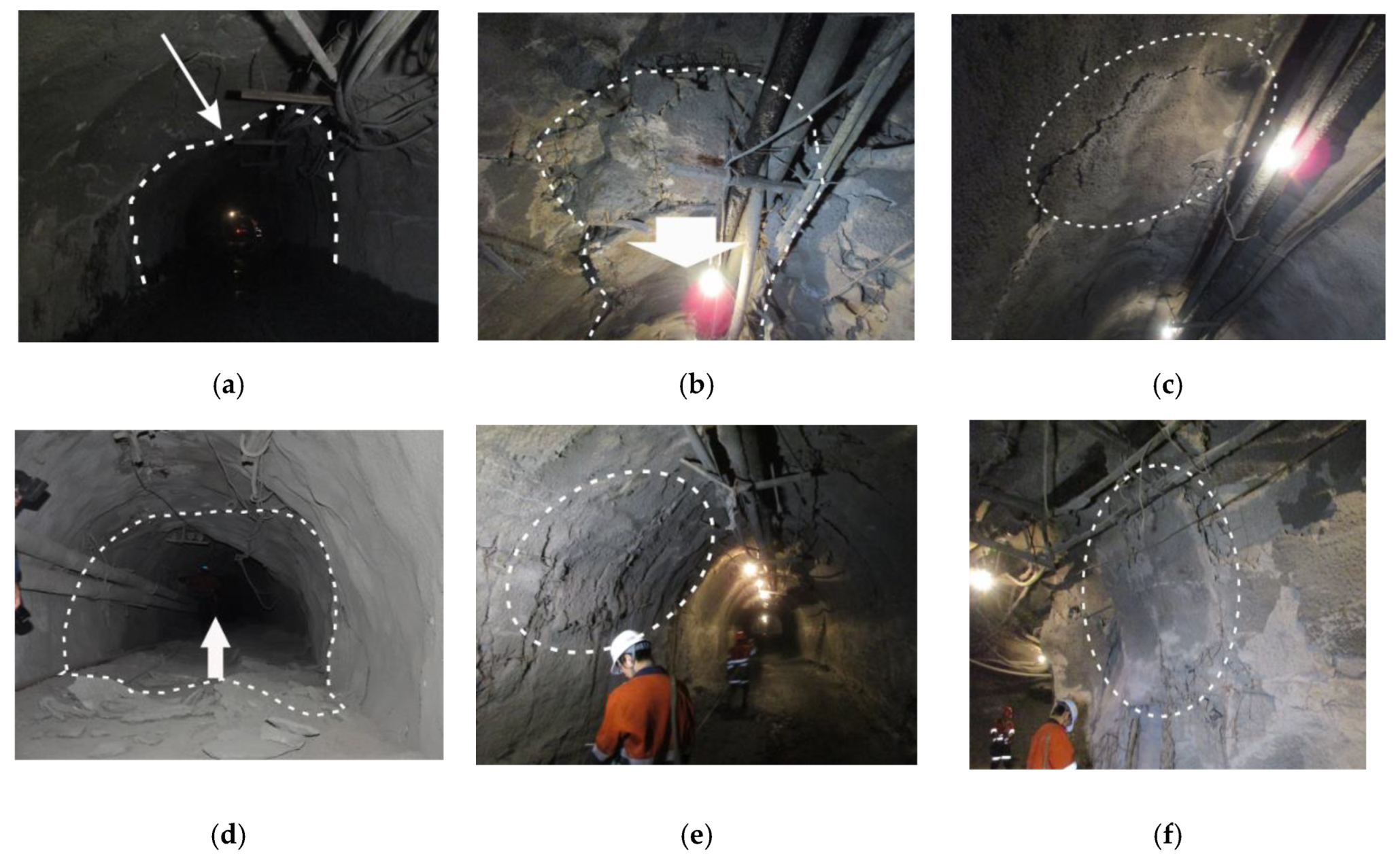
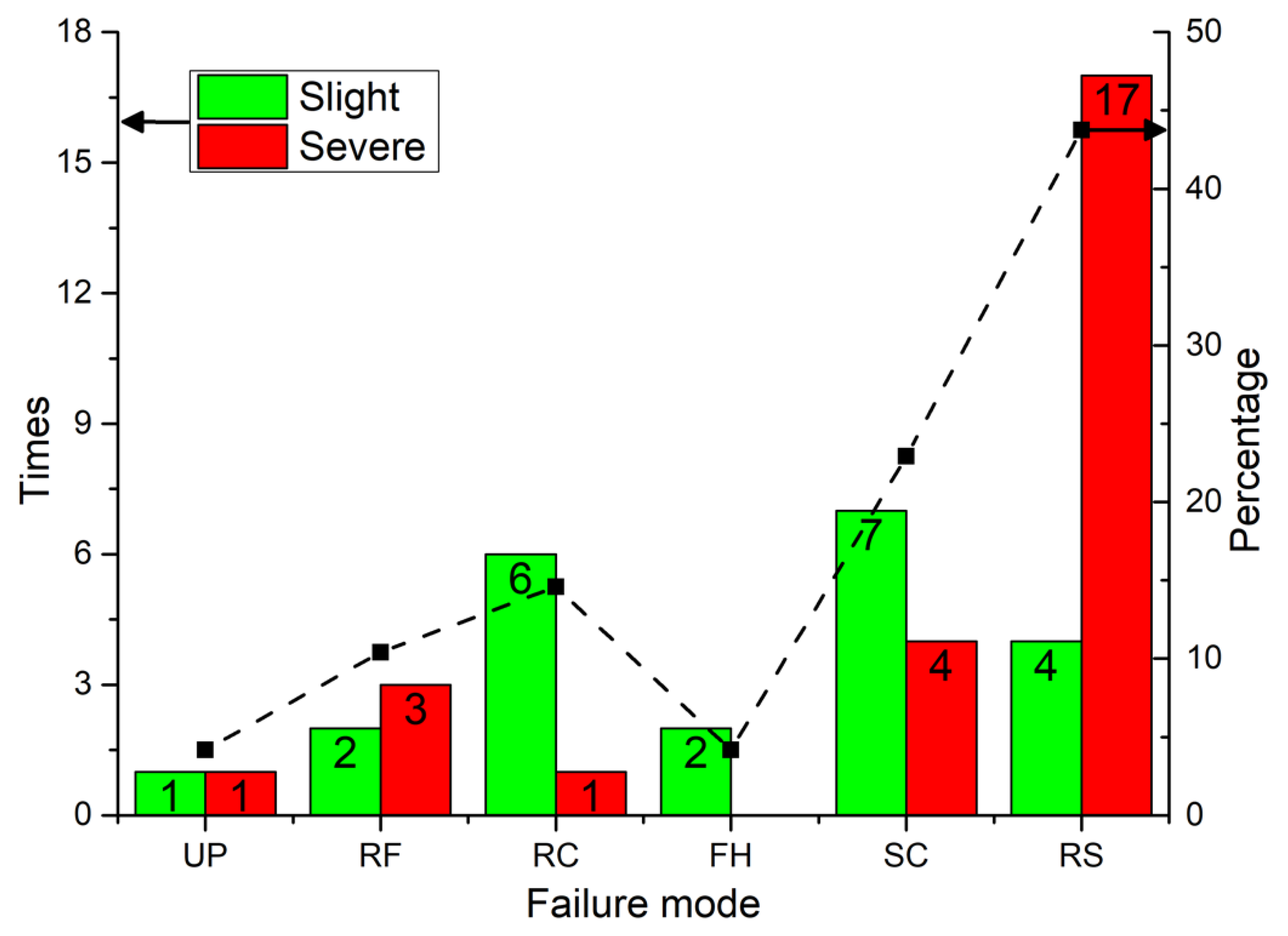
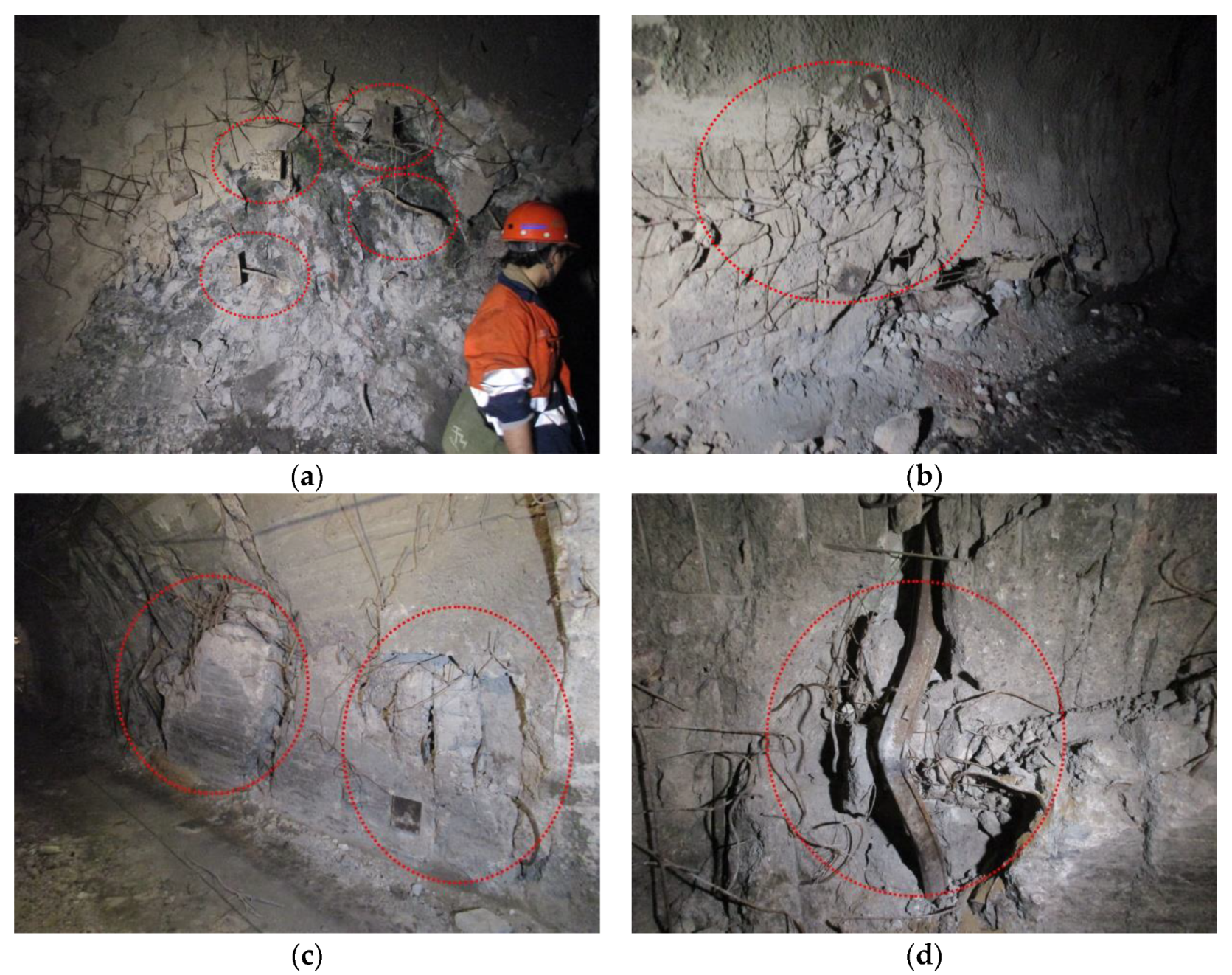
3.3. Failure Modes of Supporting Structures
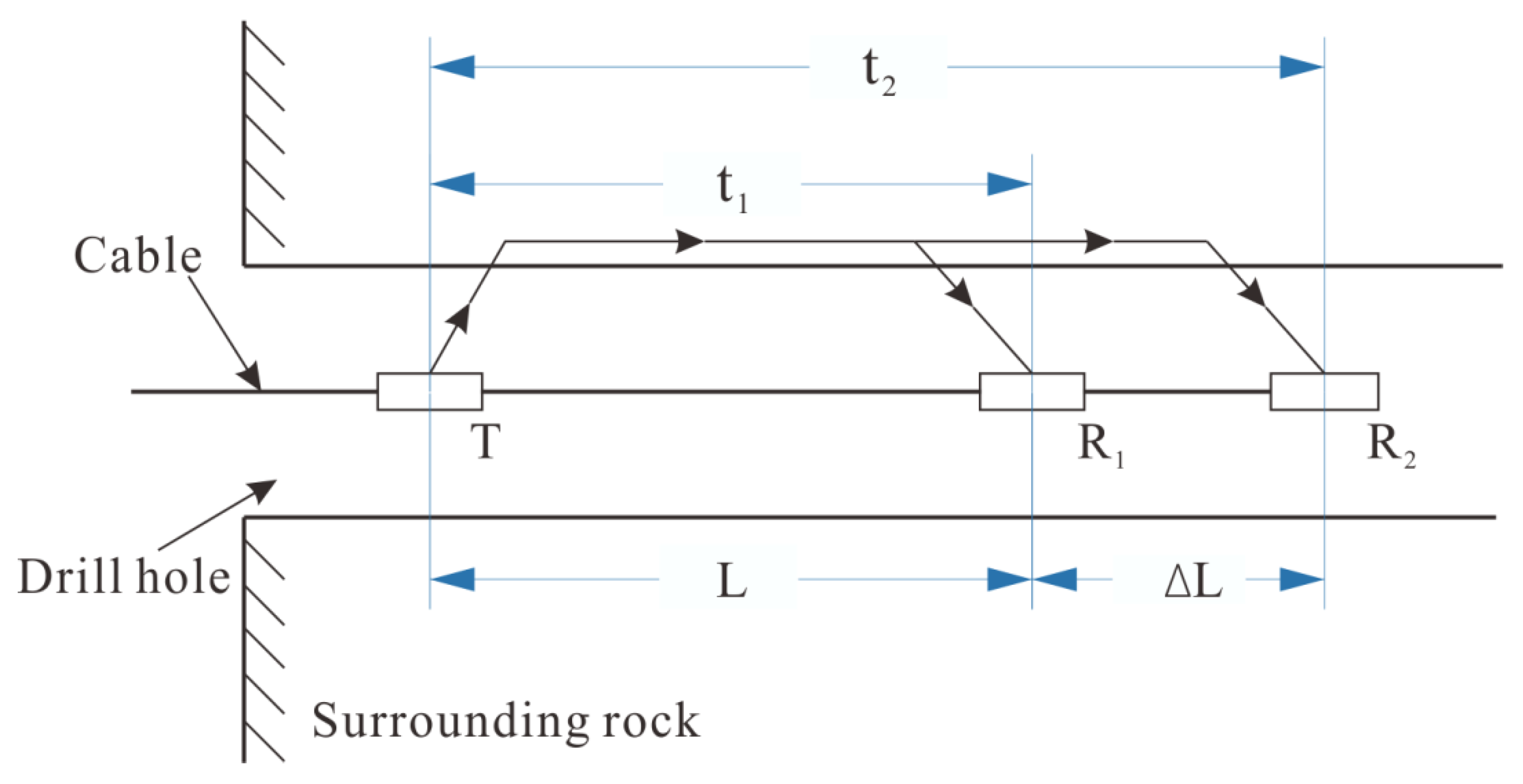
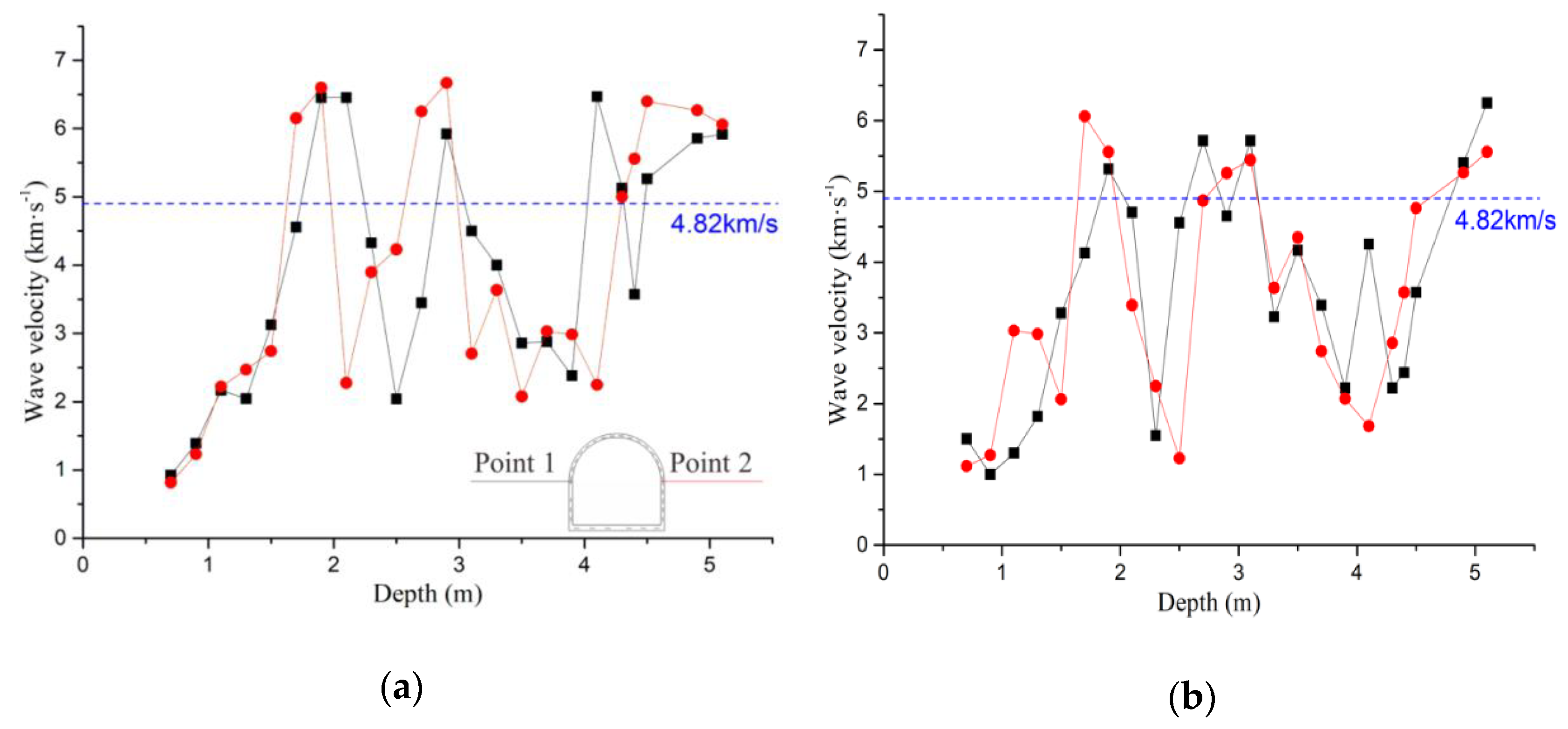
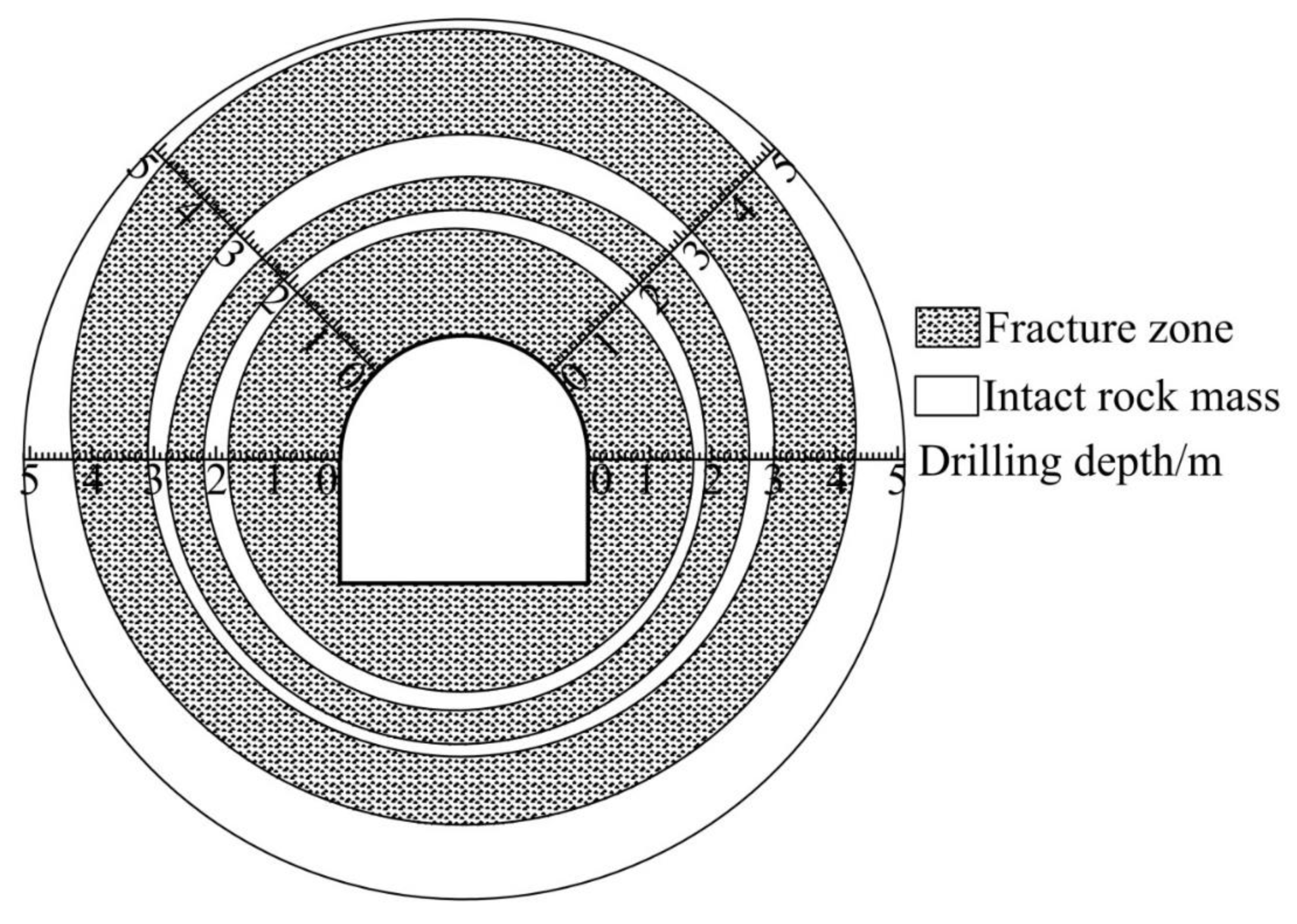
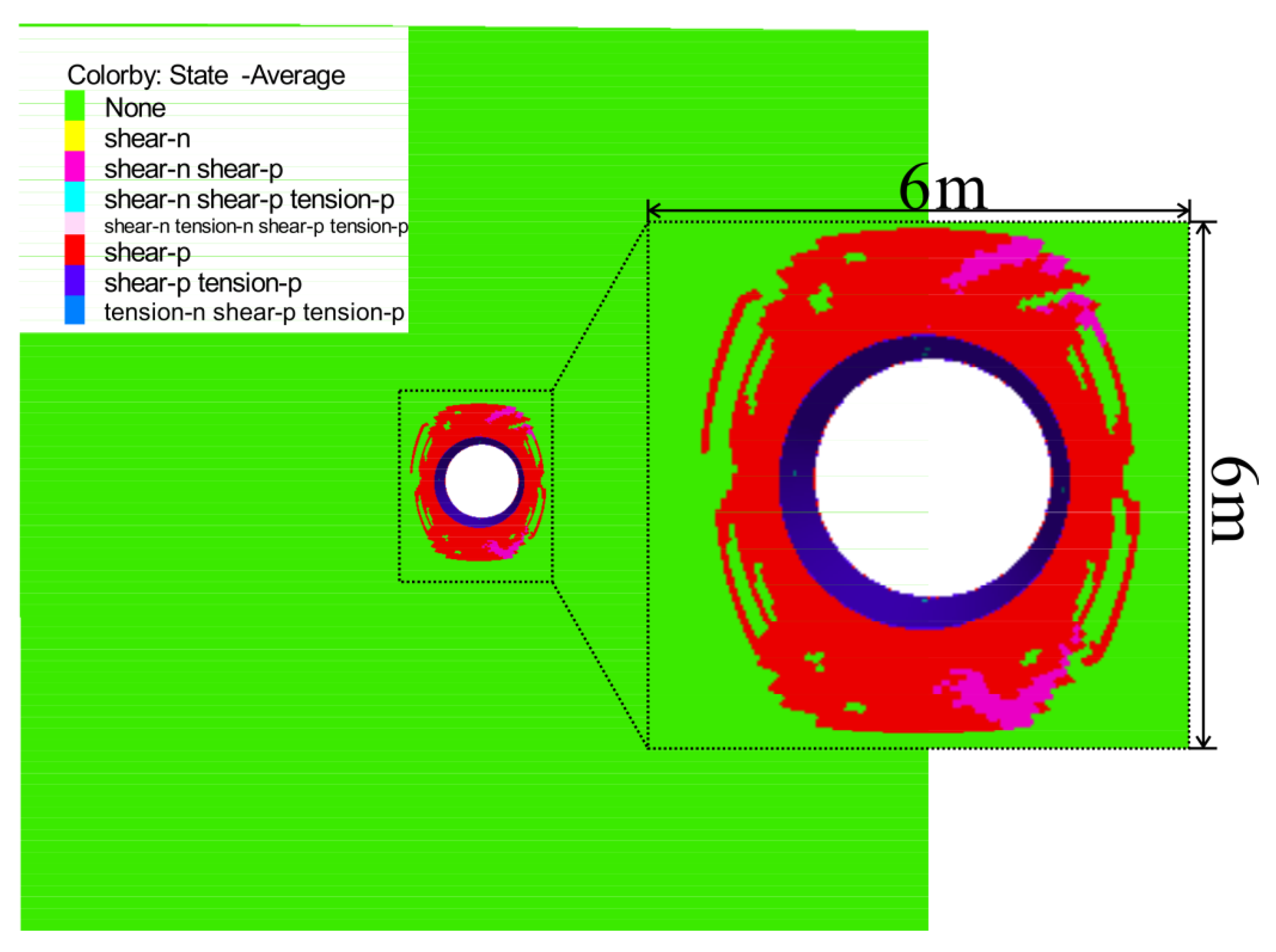
3.4. Rock Mass’s Zonal Disintegration around the Roadways
4. “Multistage Anchorage System + CFST” Combined Support Technology
4.1. Establishment of the New Support Method
- The U-shaped steel strength is insufficient under broken rock and high ground stress, as the steel tended to bend and even began to break, especially on the straight wall foot.
- Owing to the large fractured zone and zonal disintegration, the surrounding rock was not pierced completely for coupling as the bolts were not sufficiently long, which resulted in a low anchorage force and easy failure.
- There is no feasible measure to handle the floor deformation where the roadway deformation occurs and gradually develops.
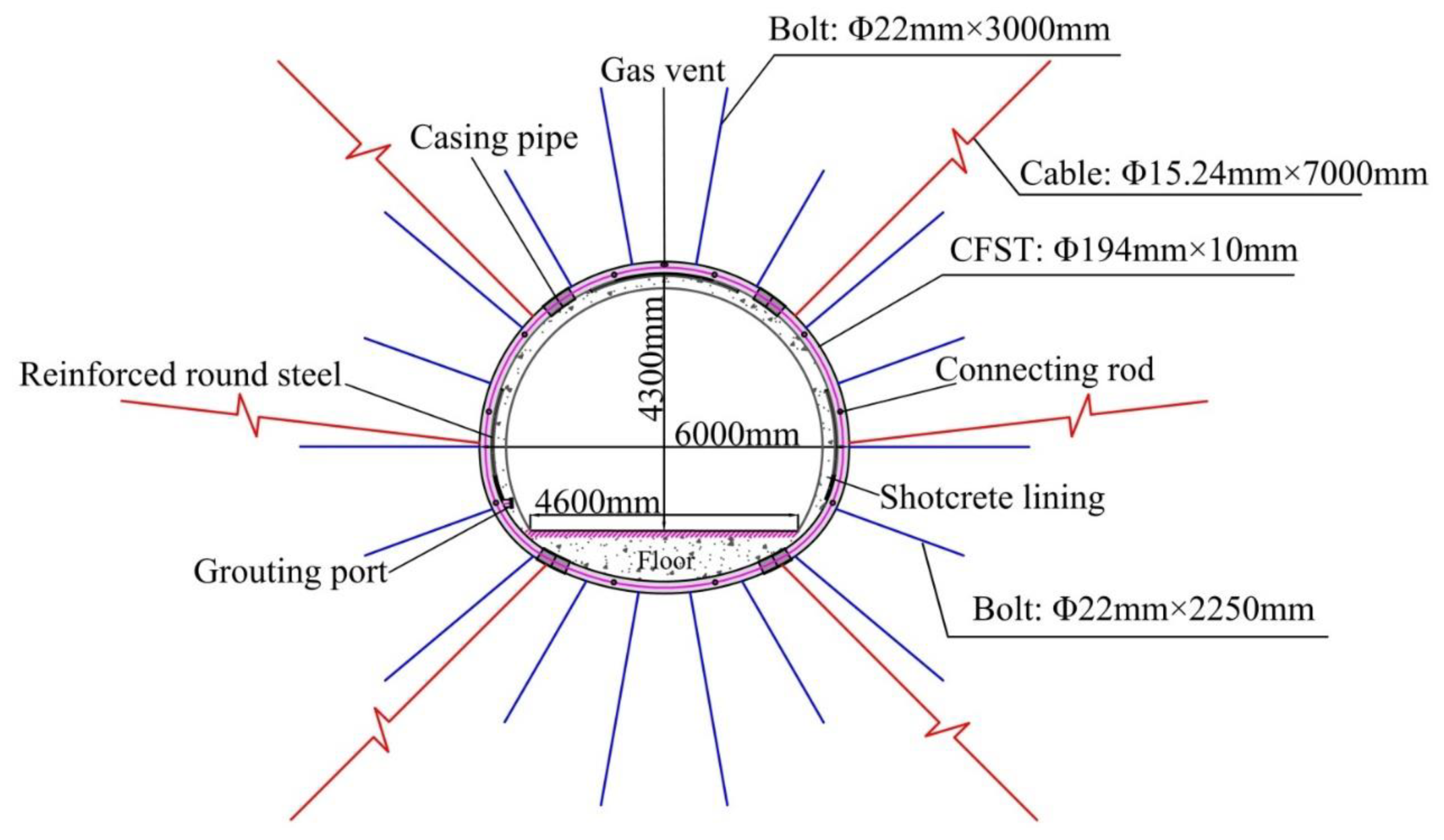
4.1.1. Multistage Anchorage System
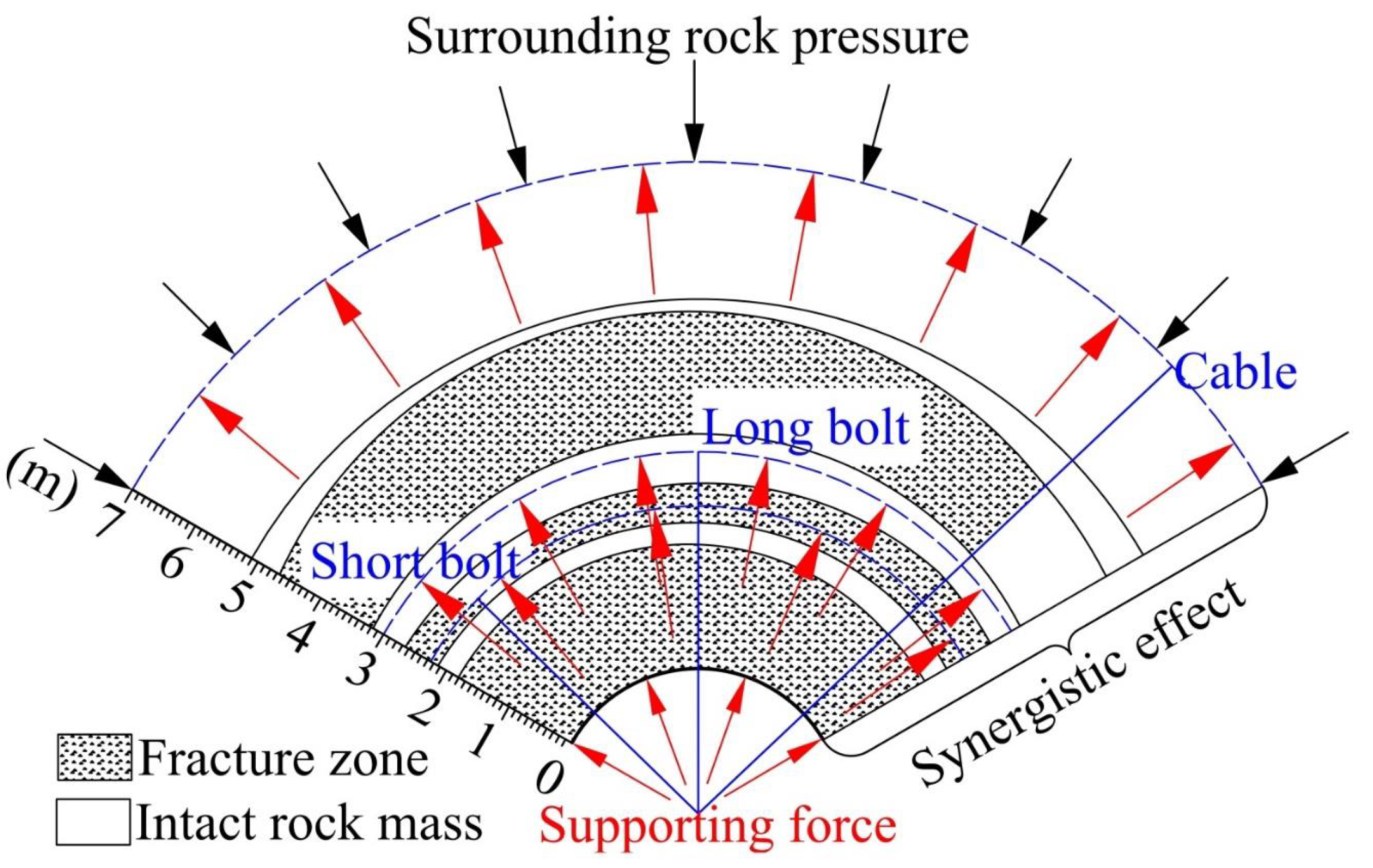
- Short bolts: 2.25 m full-length mortar bolts, with spacing of 1 m × 2 m, which are applied immediately after the roadway excavation and equipped with a 10 cm concrete spraying layer. The short bolts pass through the first complete rock mass layer, fixing the outermost broken zone to prevent roof falling and collapse during the construction process. This kind of flexible support can also release the original rock stress to some extent, diminishing the pressure for the forthcoming rigid support.
- Long bolts: 3 m full-length mortar bolts, with spacing of 1 m × 2 m. On the basis of the results of the broken rock zone test, the long bolts are able to pass through two broken zones and one intact zone to reach the second intact zone and fix this part of the rock together to completely exploit the rock mass’s self-bearing capacity.
- Cables: 7 m, installed on the haunches, spandrels and corners on which large deformations frequently occur, to fully regulate the horizontal deformation of the roadways. Moreover, cables are connected with the surrounding rock reinforced by shallow combined bolts, forming a support system with a strong anti-deformation ability and greatly improving the stability and integrity of the surrounding rock.
4.1.2. CFST
4.2. Numerical Simulations
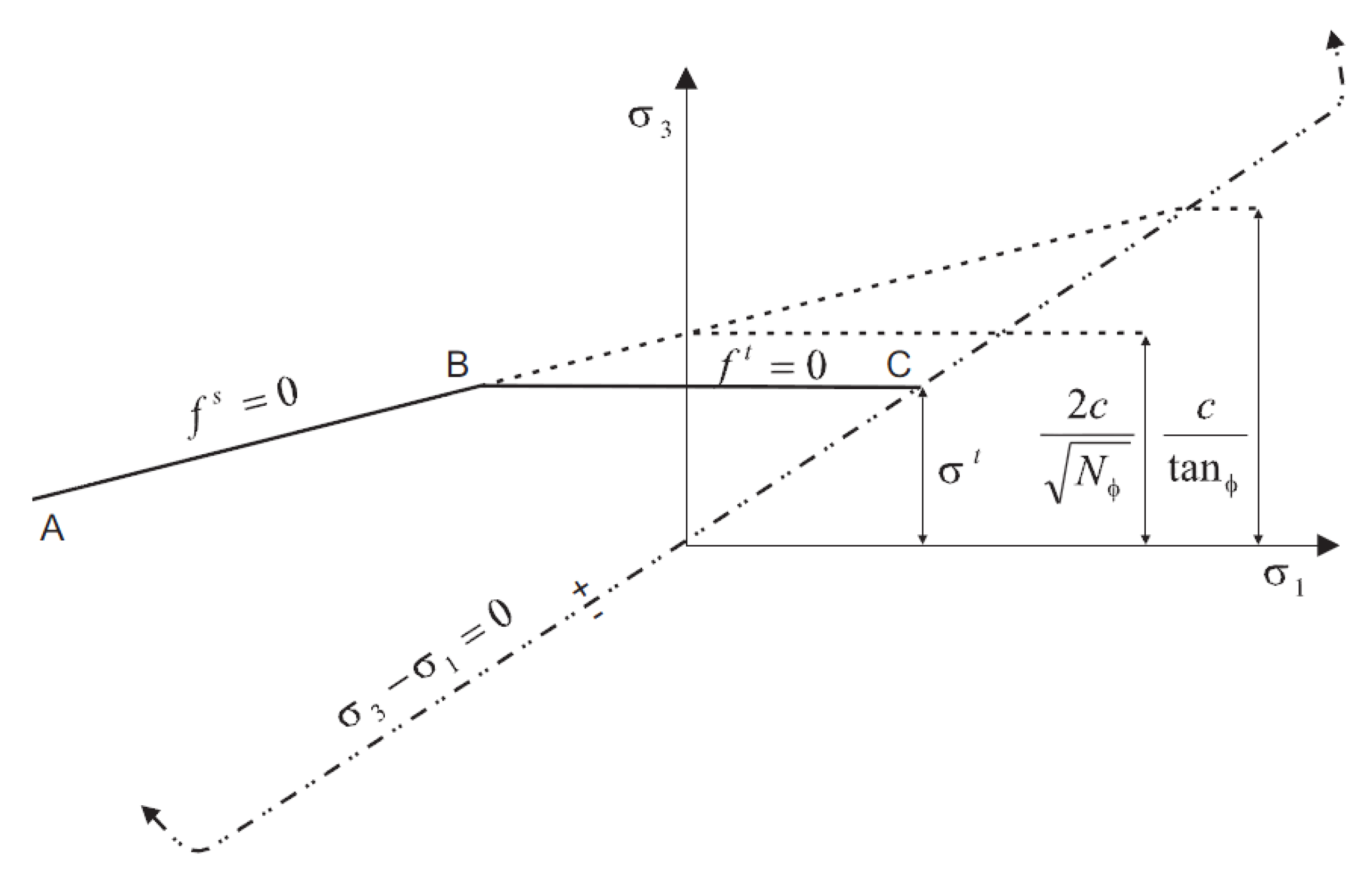
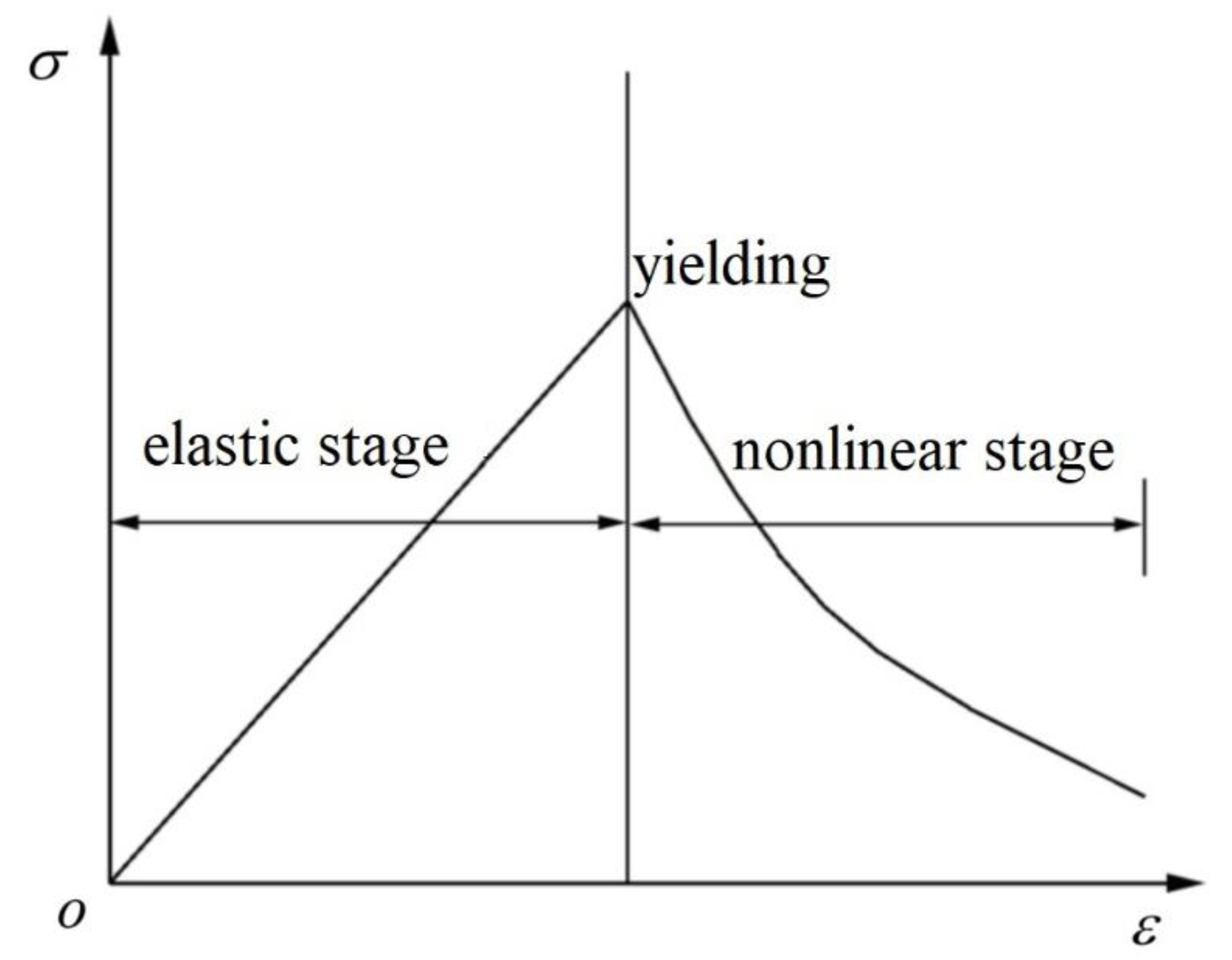
4.2.1. Constitutive Models
4.2.2. Numerical Models
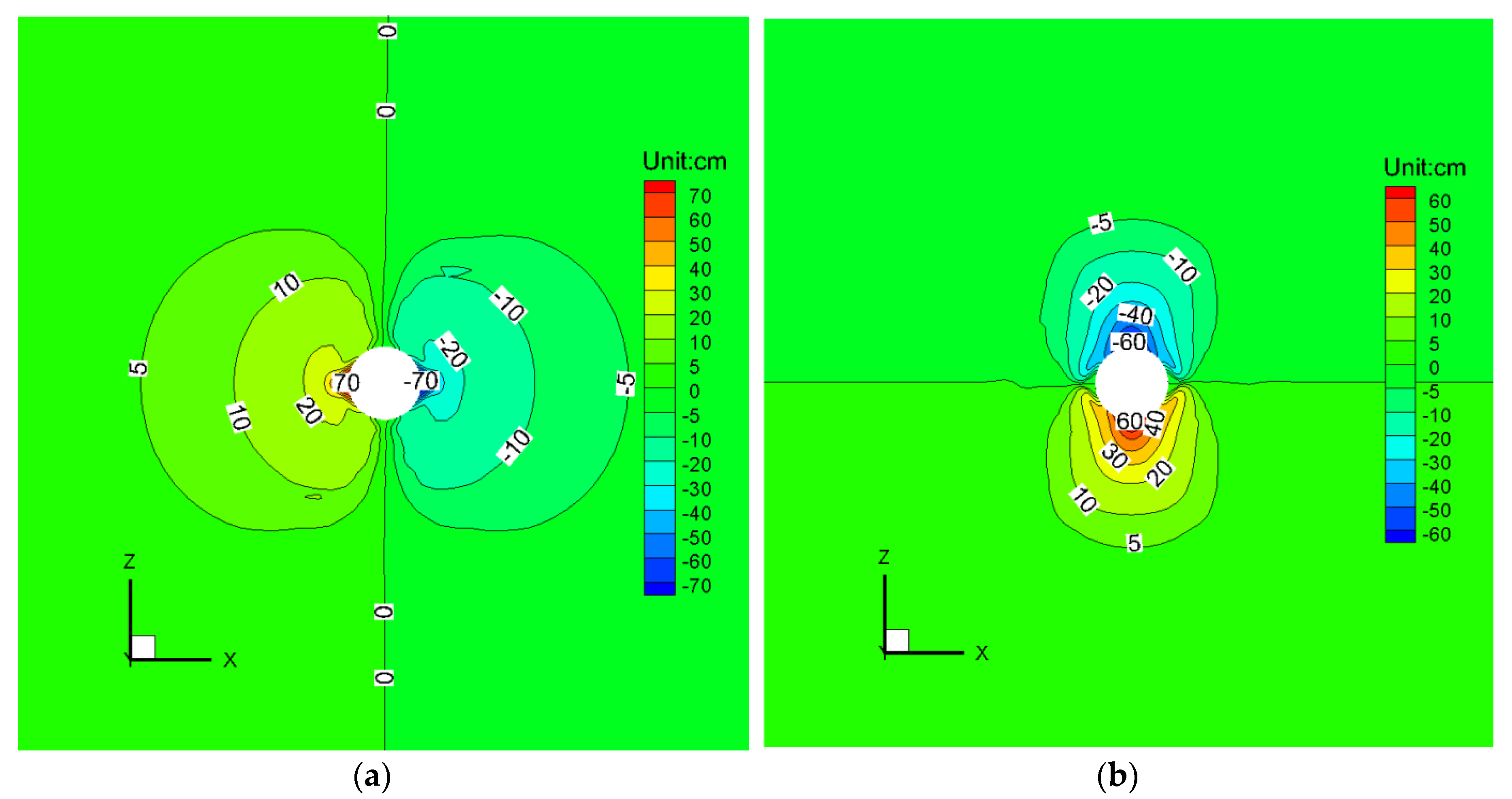
4.2.3. Simulation Results
4.3. Field Monitoring
5. Conclusions
- (1)
- The roadway deformation failure types could be sorted into six types, including roof cracking, floor heaving, unsymmetrical pressure, roof falling, side cracking and rib spalling, among which rib spalling is the most severe. Moreover, the main features of roadway deformation include prominent time effects and significant space effects, and the maximum principal stress plays a dominant role.
- (2)
- The broken rock zone test found that zonal disintegration phenomena occur in the test roadway and there are three broken rock zones whose depths are approximately 0–1.8, 2–2.8, and 3–4.8 m. The zonal disintegration proves that the anchoring method used in the original support is not feasible.
- (3)
- An improved combined supporting scheme called the “multistage anchorage + CFST” has been put forward and assessed. The supporting structures and surrounding rock mass formed a hierarchical support system which could cooperate and work together. The results of the numerical simulation and field monitoring indicate the effectiveness of the new support scheme’s control effect.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Guo, Z.; Yang, X.; Bai, Y.; Zhou, F.; Li, E.; Guo, Z.; Yang, X.; Bai, Y.; Zhou, F.; Li, E. A study of support strategies in deep soft rock: The horsehead crossing roadway in Da qiang coal mine. Int. J. Min. Sci. Technol. 2012, 22, 665–667. [Google Scholar] [CrossRef]
- Coggan, J.; Gao, F.; Stead, D.; Elmo, D. Numerical modelling of the effects of weak immediate roof lithology on coal mine roadway stability. Int. J. Coal Geol. 2012, 90, 100–109. [Google Scholar] [CrossRef]
- Huang, F.; Zhu, H.H.; Zhu, Q.W.; Xu, Q.W. The effect of weak interlayer on the failure pattern of rock mass around tunnel-Scaled model tests and numerical analysis. J. Tunn. Undergr. Space Technol. 2013, 35, 207–218. [Google Scholar] [CrossRef]
- Hong-sheng, T.; Shi-hao, T.; Chen, W.; Ding-yi, H.; De-fu, Z. Mechanical analysis of a vertical-wall, semicircular-arch roadway and a repair technique using double-shell support. Environ. Earth Sci. 2018, 77, 509. [Google Scholar] [CrossRef]
- Yan, S.; Bai, J.B.; Li, W.F.; Chen, J.G.; Li, L. Deformation mechanism and stability control of roadway along a fault subjected to mining. Int. J. Min. Sci. Technol. 2012, 22, 559–565. [Google Scholar] [CrossRef]
- Yu, Y.; Bai, J.; Wang, X.; Zhang, L. Control of the Surrounding Rock of a Goaf-Side Entry Driving Heading Mining Face. Sustainability 2020, 12, 2623. [Google Scholar] [CrossRef]
- Chang, Q.L.; Zhou, H.Q.; Xie, Z.H.; Shen, S.P. Anchoring mechanism and application of hydraulic expansion bolts used in soft rock roadway floor heave control. Int. J. Min. Sci. Technol. 2013, 23, 323–328. [Google Scholar] [CrossRef]
- Gao, F.Q.; Stead, D.; Kang, H.P. Numerical simulation of squeezing failure in a coal mine roadway due to mining-induced stresses. Rock Mech. Rock Eng. 2015, 48, 1635–1645. [Google Scholar] [CrossRef]
- Chen, X.; Guo, H.; Zhao, P.; Peng, X.; Wang, S. Numerical modeling of large deformation and nonlinear frictional contact of excavation boundary of deep soft rock tunnel. J. Rock Mech. Geotech. Eng. 2011, 3, 421–428. [Google Scholar]
- Kang, Y.S.; Liu, Q.S.; Xi, H.L. Numerical analysis of THM coupling of a deeply buried roadway passing through composite strata and dense faults in a coal mine. Bull. Eng.Geol. Environ. 2014, 73, 77–86. [Google Scholar] [CrossRef]
- Yang, S.Q.; Chen, M.; Jing, H.W.; Chen, K.F.; Meng, B. A case study on large deformation failure mechanism of deep soft rock roadway in Xin’An coal mine, China. Eng. Geol. 2017, 217, 89–101. [Google Scholar] [CrossRef]
- Shen, B.T. Coal mine roadway stability in soft rock: A case study. Rock Mech. Rock Eng. 2014, 47, 2225–2238. [Google Scholar] [CrossRef]
- He, M.C.; Guo, Z.B. Mechanical properties and engineering application of anchor bolt with constant resistance and large deformation. Chin. J. Rock Mech. Eng. 2014, 33, 1297–1308. [Google Scholar]
- Sun, X.M.; Wang, D.; Wang, C.; Liu, X.; Zhang, B.; Liu, Z.Q. Tensile properties and application of constant resistance and large deformation bolts. Chin. J. Rock Mech. Eng. 2014, 33, 1765–1771. [Google Scholar]
- Li, S.C.; Shao, X.; Jiang, B.; Wang, Q.; Wang, F.Q.; Ren, Y.X.; Wang, D.C.; Ding, G.L. Study of the mechanical characteristics and influencing factors of concrete arch confined by square steel set in deep roadways. J. Chin. Univ. Min. Technol. 2015, 44, 400–408. [Google Scholar]
- Srivastava, L.P.; Singh, M. Effect of fully grouted passive bolts on joint shear strength parameters in a blocky mass. Rock Mech. Rock Eng. 2015, 48, 1197–1206. [Google Scholar] [CrossRef]
- Gao, Y.F.; Wang, B.; Wang, J. Test on structural property and application of concrete-filled steel tube support of deep mine and soft rock roadway. Chin. J. Rock Mech. Eng. 2010, 29, 2604–2609. (In Chinese) [Google Scholar]
- Li, S.C.; Wang, Q.; Li, W.T.; Wang, D.C.; Li, Z.; Jiang, B.; Wang, H.P.; Wang, H.T. Comparative field test study of pressure relief anchor box beam support system in deep thick top coal roadway. Chin. J. Rock Mech. Eng. 2012, 31, 656–666. [Google Scholar]
- Zhang, J.; Liu, L. R & D and application of curved D-shape concrete-filled steel tube support in roadway support. Geotech. Geol. Eng. 2018, 36, 551–566. [Google Scholar]
- Aksoy, C.O.; Ogul, K.; Topal, I.; Ozer, S.C.; Ozacar, V.; Posluk, E. Numerical modeling of non-deformable support in swelling and squeezing rock. Int. J. Rock Mech. Min. Sci. 2012, 52, 61–70. [Google Scholar] [CrossRef]
- Shen, J.; Huang, W.; Yang, X.; Shi, J.; Zheng, K. Stressing State Analysis of CFST Arch Supports in Deep Roadway Based on NSF Method. Appl. Sci. 2019, 9, 4238. [Google Scholar] [CrossRef]
- Yang, J.; Wang, D.; Shi, H.Y.; Xu, H.C. Deformation failure and countermeasures of deep tertiary extremely soft rock roadway in Liuhai coal mine. Int. J. Min. Sci. Technol. 2015, 25, 231–236. [Google Scholar] [CrossRef]
- Meng, Q.; Han, L.; Chen, Y.; Fan, J.; Wen, S.; Yu, L.; Li, H. Influence of dynamic pressure on deep underground soft rock roadway support and its application. Int. J. Min. Sci. Technol. 2016, 26, 903–912. [Google Scholar] [CrossRef]
- Wang, F.T.; Zhang, C.; Wei, S.F.; Zhang, X.G.; Guo, S.H. Whole section anchor-grouting reinforcement technology and its application in underground roadways with loose and fractured surrounding rock. Tunn. Undergr. Space Technol. 2016, 51, 133–143. [Google Scholar]
- Lv, Z.; Qin, Q.; Jiang, B.; Luan, Y.; Yu, H. Comparative study on the mechanical mechanism of confined concrete supporting arches in underground engineering. PLoS ONE 2018, 13, e0191935. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.L.; Wang, L.G.; Zhang, B. An experimental study of a yielding support for roadways constructed in deep broken soft rock under high stress. Min. Sci. Technol. 2011, 21, 839–844. [Google Scholar] [CrossRef]
- Barla, G.; Bonini, M.; Semeraro, M. Analysis of the behaviour of a yield-control support system in squeezing rock. Tunn. Undergr. Space Technol. 2011, 26, 146–154. [Google Scholar] [CrossRef]
- Zhao, H.; Ma, F.; Zhang, Y.; Guo, J. Monitoring and mechanisms of ground deformation and ground fissures induced by cut-and-fill mining in the Jinchuan Mine 2, China. Environ. Earth Sci. 2013, 68, 1903–1911. [Google Scholar] [CrossRef]
- Ma, F.; Zhao, H.; Yuan, R.; Guo, J. Ground movement resulting from underground backfill mining in a nickel mine (Gansu Province, China). Nat. Hazards 2015, 77, 1475–1490. [Google Scholar] [CrossRef]
- Lu, R.; Ma, F.; Guo, J.; Zhao, H. Analysis and monitoring of roadway deformation mechanisms in nickel mine, China. Concurr. Comput. Pract. Exper. 2018, 31, e4832. [Google Scholar] [CrossRef]
- Wu, M.L.; Ma, Y.; Liao, C.T. Study on recent state of stress in depth 1 000 m of Jinchuan mine. Chin. J. Rock Mech. Eng. 2008, 27 (Suppl. 2), 3785–3790. (In Chinese) [Google Scholar]
- Li, G.; Ma, F.; Liu, G.; Zhao, H.; Guo, J. A Strain-Softening Constitutive Model of Heterogeneous Rock Mass Considering Statistical Damage and Its Application in Numerical Modeling of Deep Roadways. Sustainability 2019, 11, 2399. [Google Scholar] [CrossRef]
- Li, G.; Ma, F.; Guo, J.; Zhao, H.; Liu, G. Study on deformation failure mechanism and support technology of deep soft rock roadway. Eng. Geol. 2020, 264, 105262. [Google Scholar] [CrossRef]
- Liu, Y.; Ye, Y.; Wang, Q.; Liu, X.; Wang, W. Predicting the Loose Zone of Roadway Surrounding Rock Using Wavelet Relevance Vector Machine. Appl. Sci. 2019, 9, 2064. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lithology | Type | Density (g·cm−3) | Tensile Strength (MPa) | Compressive Strength (MPa) | Cohesion (MPa) | Internal Friction Angle (°) | Elastic Moduli (GPa) | Poisson’s Ratio | RMR |
|---|---|---|---|---|---|---|---|---|---|
| Marble | Intact rock | 2.86 | 11.00 | 104.0 | 9.5 | 42.0 | 64.0 | 0.16 | - |
| Rock mass | 2.40 | 0.80 | 15.0 | 0.7 | 35.0 | 6.0 | 0.26 | 39.56 | |
| Migmatite | Intact rock | 2.73 | 9.09 | 51.9 | 15.5 | 32.0 | 55.0 | 0.15 | - |
| Rock mass | 2.45 | 1.00 | 17.0 | 0.8 | 35.0 | 6.4 | 0.25 | 40.27 | |
| Ultrabasic rock | Lherzolite | 2.93 | 13.00 | 150.0 | 11.5 | 43.5 | 95.0 | 0.23 | - |
| Rich ore | 3.02 | 9.60 | 73.5 | 10.0 | 45.0 | 70.0 | 0.22 | - | |
| Poor ore | 3.05 | 6.60 | 70.0 | 7.0 | 43.5 | 65.0 | 0.31 | - | |
| Rock mass | 2.50 | 2.20 | 25.0 | 0.8 | 38.0 | 7.0 | 0.24 | 43.23 |
| No. | Lithology | σ1 | σ2 | σ3 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Value (MPa) | Direction (°) | Dip Angle (°) | Value (MPa) | Direction (°) | Dip Angle (°) | Value (MPa) | Direction (°) | Dip Angle (°) | ||
| G1 | Marble | 42.5 | 43 | 43 | 15.8 | 98 | −27 | 11.3 | 171 | −28 |
| G2 | Ultrabasic rock | 43.8 | 28 | −21 | 16.7 | 131 | −28 | 12.0 | 87 | 53 |
| G3 | Marble | 46.6 | 193 | 65 | 25.3 | 89 | 7 | 19.1 | 176 | −25 |
| G4 | Marble | 44.4 | 224 | 21 | 31.8 | −45 | 3 | 24.2 | 232 | −68 |
| Rock Mass Integrity | Excellent | Good | Medium | Poor | Broken |
|---|---|---|---|---|---|
| Kv | >0.75 | 0.75–0.55 | 0.55−0.35 | 0.35−0.15 | <0.15 |
| Vp (km/s) | >5630 | 5630−4820 | 4820−3845 | 3845−2517 | <2517 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Ma, F.; Guo, J.; Zhao, H. Deformation Characteristics and Control Method of Kilometer-Depth Roadways in a Nickel Mine: A Case Study. Appl. Sci. 2020, 10, 3937. https://doi.org/10.3390/app10113937
Li G, Ma F, Guo J, Zhao H. Deformation Characteristics and Control Method of Kilometer-Depth Roadways in a Nickel Mine: A Case Study. Applied Sciences. 2020; 10(11):3937. https://doi.org/10.3390/app10113937
Chicago/Turabian StyleLi, Guang, Fengshan Ma, Jie Guo, and Haijun Zhao. 2020. "Deformation Characteristics and Control Method of Kilometer-Depth Roadways in a Nickel Mine: A Case Study" Applied Sciences 10, no. 11: 3937. https://doi.org/10.3390/app10113937
APA StyleLi, G., Ma, F., Guo, J., & Zhao, H. (2020). Deformation Characteristics and Control Method of Kilometer-Depth Roadways in a Nickel Mine: A Case Study. Applied Sciences, 10(11), 3937. https://doi.org/10.3390/app10113937