1. Introduction
GPS provides navigational solutions with good accuracy in open sky environments. One vital application that uses this service is land vehicles, in which navigation systems are embedded in passenger cars, farming vehicles, police cars, fire trucks, and others. These applications require reliable navigations systems to know their locations within a few meters. The problem with GPS is that under certain conditions, such as signal interference and jamming, GPS signals cannot be easily—or even be available to be—tracked, since they could be consistently interrupted or totally blocked [
1,
2,
3,
4,
5]. This often leads to loss of signal lock, and hence, requires re-acquiring the signal for the corresponding satellite, a process that intensively consumes the receiver resources and might affect the navigation performance. To avoid such intensive computations, a GPS receiver needs to employ a signal tracking mechanism that could hold and/or re-lock on the signals and keep track of their dynamic changes and errors. Moreover, the signal tracking process is the source of the receiver measurements; thus, it has a direct effect on the accuracy of the obtained navigation solution. These measurements could experience inherent errors due to the common error sources affecting the GPS signals such as multi-path and signal jamming. This makes the choosing of a successful tracking method a crucial and more challenging task in GPS receiver design [
6]. Conventional receiver designs utilize scalar tracking algorithms, which do not allow the receiver to benefit from the navigation state information to facilitate and enhance the signal tracking process.
Figure 1 shows a block diagram for a scalar system tracking N satellites. Pseudoranges and pseudorange rates are separately generated and only processed together in the navigation filter. Thus, no information exchange happens between the different tracking channels in this mechanism. Vector-based tracking, on the other hand, feeds back [
7,
8,
9] any available information about receiver position, velocity, and acceleration to the tracking stage. In this way, information exchange between the different channels is possible, allowing improved performance in conditions where there is low signal power or poor satellite availability.
Figure 2 gives an overview of the general architecture of vector tracking systems. Vector tracking systems combine all the channels to produce pseudoranges and pseudorange rates and the navigation solution in one filter. The early designs also use Costas tracking loops as their core blocks. State estimation algorithms have been effectively introduced into vector-based tracking systems. At the forefront of these algorithms is the Kalman filter, in a range of versions and configurations. Several implementations employing this filter in vector tracking showed improved performance over scalar tracking systems. Nonetheless, most of the related research recommends further investigation into more efficient algorithms with faster response and less complexity. Supporting vector-based tracking systems with information from external sources can further improve their performance and reliability. INS systems are a popular choice of such a supplementary source. However, augmenting a GPS with an INS that uses a full inertial measurement unit (IMU) comes with the penalty of higher complexity and increased cost. Thus, recent research has been directed towards the use of Micro-Electro-Mechanical Systems (MEMS) grade inertial sensors for low cost navigation applications [
6]. Nonetheless, these inexpensive sensors have complex error characteristics; therefore, the latest research is conducted to utilize a smaller number of inertial sensors inside the IMU to obtain the navigation solution [
10]. Advantage of this trend is twofold. The first is to avoid the effect of the inertial sensor errors. The second is to reduce the cost of the IMU in general [
11]. One such approach known as RISS (Reduced Inertial Sensor System) is discussed in [
10,
11,
12,
13]. This paper investigates using RISS to provide an efficient, reliable, yet less complex and inexpensive ultra-tight GPS/INS integrated solution. Augmenting GPS vector-tracking loops with the RISS, the proposed ultra-tight GPS/INS integrated solution, as discussed below, uses specific models that are different from its counterparts reported in literature. Furthermore, the performance of the introduced system is also tested using a unique GPS/INS setup that has been implemented on the side of this work.
It is a fact that GPS is not the only operational GNSS anymore. Hence, multi-constellation and multi-frequency GNSS is one of the more realistic solutions to the problem discussed in this paper. However, there are number of applications that require relying on a single-constellation system. For example, for some strategic applications, there is an essential demand to explore solutions relying only on the GPS constellation and in most cases involving only one of the carrier frequencies. Some of the future civilian and rescue services applications require relying only on GPS and most of them either rely on L1 GPS or L5 GPS. This research addresses the issue of aiding single constellation (GPS) operating at one carrier frequency with other self-contained navigation systems, i.e., INS, rather than using multi-constellations. However, the concepts introduced in this paper can similarly be applied to other satellite-based navigation systems.
Different forms of ultra-tightly coupled GPS/INS integration systems have been presented in literature using either different integration algorithms and/or sensors configuration. A Kalman filter-based design is proposed in [
14] that combines the GPS and INS systems at the correlator output stage of the GPS receiver with the conventional code/carrier tracking loops merged in the integration Kalman filter. Research in [
15] proposed a GPS/INS integrated based on what is called multi-channel cooperated tracking (COOP tracking). The INS and COOP loops operate together to provide a nearly perfect reference for receiver dynamics and receiver clock errors. Thus, the PLL/DLL loops track the differences between the incoming and the local signals, which have been compensated by INS and COOP loops. In [
16] researchers propose a strategy of an ultra-tight GPS/INS integration system based on an unscented Kalman filter (UKF). The GPS/INS ultra-tight integration system exploit the position velocity and attitude which are obtained from INS to estimate the I/Q signal, then the I/Q error formed by INS estimation and GPS measurement can be obtained. Research in [
10] introduced an ultra-tight integration system to fuse GPS and reduced IMU configuration consisting of two horizontal accelerometers, a single vertical gyroscope, and wheel speed sensors. The paper investigates the feasibility of the proposed method for the ultra-tight integration for land vehicle navigation applications. Research in [
17] is extension of what is proposed in [
10]. A major addition was the use of dual frequency receiver to overcome some limitations experienced by the legacy L1 C/A signals. A combination of L1 and L2C signals, available in modern receivers, was used to obtain improved observability and therefore better navigation performance. In [
18], researchers applied an adaptive unscented Kalman filter which prudently selects deterministic sigma points from Gaussian distributions and propagates these points through a nonlinear function. Besides, the Scaled Unscented Transformation (SUT) method was selected for the sigma point selection, which gave the ability to alter the spread of sigma points and control the higher order errors through some design parameters. An improved ultra-tightly GPS/INS integration approach is proposed in [
19]. The method makes use of the neural network (NN) to improve the quality of the Doppler estimates from the Kalman filter. The algorithm is meant for seamless navigation during GPS outages. Research in [
20] presents a state estimation technique for pre-filter signal states estimate for the ultra-tight GPS/INS navigation. A fuzzy logic system is selected to improve the UKF performance and to prevent the filter divergence problem in the high dynamic environments and periods of the partial GPS outages. An unscented particle filter (UPF) is also added to the system as a pre-filtering technique to deal with the non-linear, non-Gaussian disturbances and leads to the significant accuracy improvement. A comprehensive comparison between tightly coupled integration and ultra-tight integration is given in [
21]. The paper presents a fair analysis of tight coupling and deep integration as using same grade IMUs, satellite constellations, and GPS signal processing techniques. Authors in [
22] presented an overview of various methods used to mitigate the impact on GNSS receivers caused by both unintentional and intentional jamming. The paper concluded that all the methods are helpful for jamming mitigation when applied individually but, also two or more methods can be integrated in one system. Authors in [
23] proposed a method for tracking dual-frequency BeiDou B1/B2 signals simultaneously in a vector tracking architecture to construct an ultra-tightly coupled GNSS/INS system. The article reported that the proposed method can considerably enhance the tracking and navigation performance with respect to scalar tracking systems, but without showing any details about the type/characteristics of the used jamming signals.
The main objective of this paper is to introduce an efficient ultra-tight GPS/3D Reduced Inertial Sensor System (RISS) integrated system that enhances the GPS receiver tracking robustness and sensitivity in challenging scenarios and, consequently, improves navigation availability.
2. Ultra-Tight GPS/INS Integration and RISS
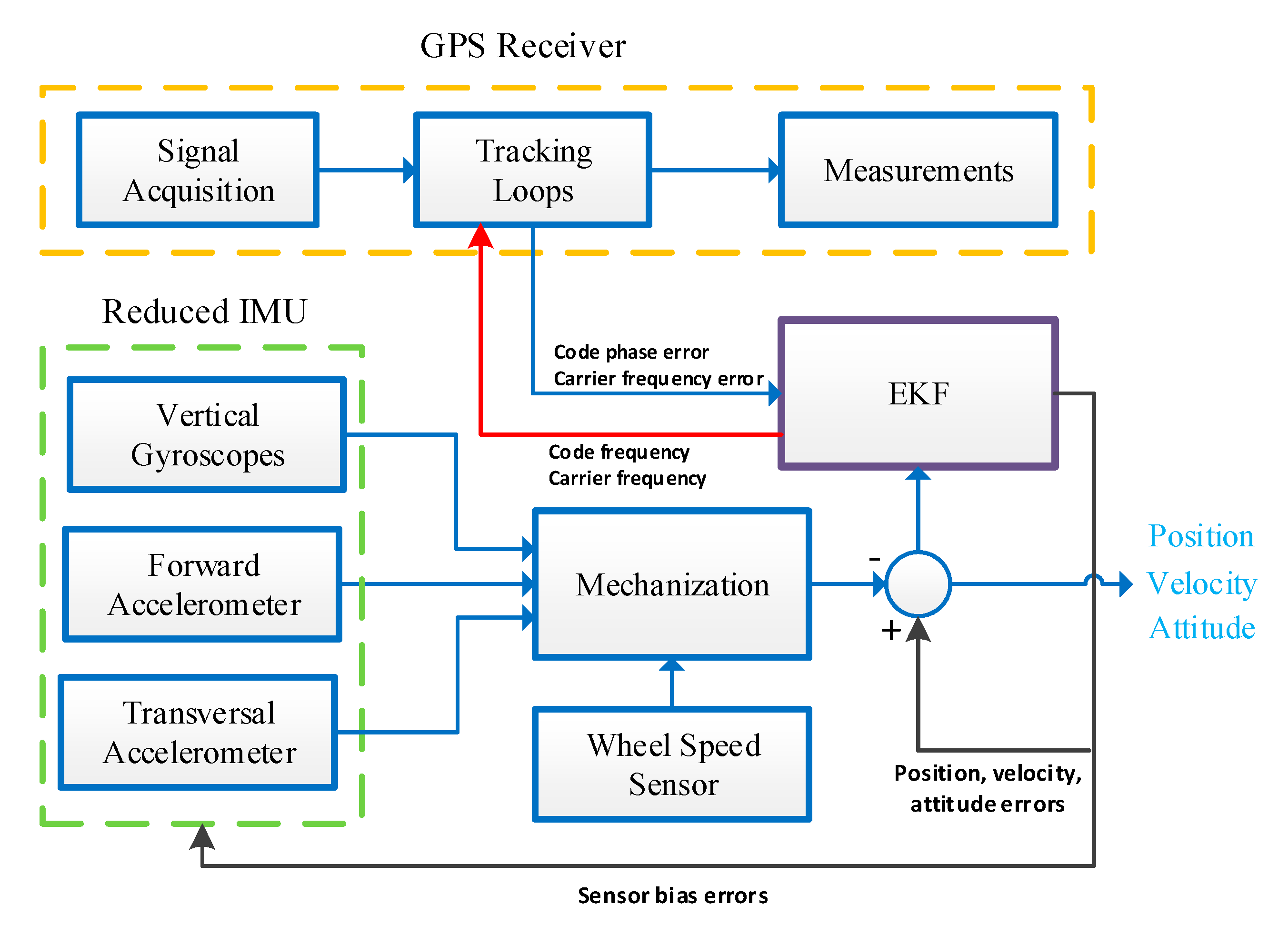
The ultra-tightly coupled integration, which is the state-of-the-art for GPS/INS integration, has been investigated over the past two decades. In this approach, as can be seen in
Figure 3, the GPS raw measurements come directly from the front end of the GPS receiver, in the form of In-phase (I) and quadrature (Q) signal samples [
24,
25]. The correlator outputs I and Q are fed into the integration filter as measurements. Thus, estimated Doppler can be used to assist the tracking loops during GPS signal outages or under high receiver dynamics [
26,
27]. The integration of INS derived Doppler feedback to the carrier tracking loops provides a vital benefit to this system; the INS Doppler aiding removes the vehicle Doppler from the GPS signal; hence, it results in a major reduction in the carrier tracking loop bandwidth [
22]. The bandwidth reduction, in turn, improves the anti-jamming performance of the receiver and, hence, increases the post correlated signal strength. In addition, due to lower bandwidths, the accuracy of the raw measurements is likewise increased [
19].
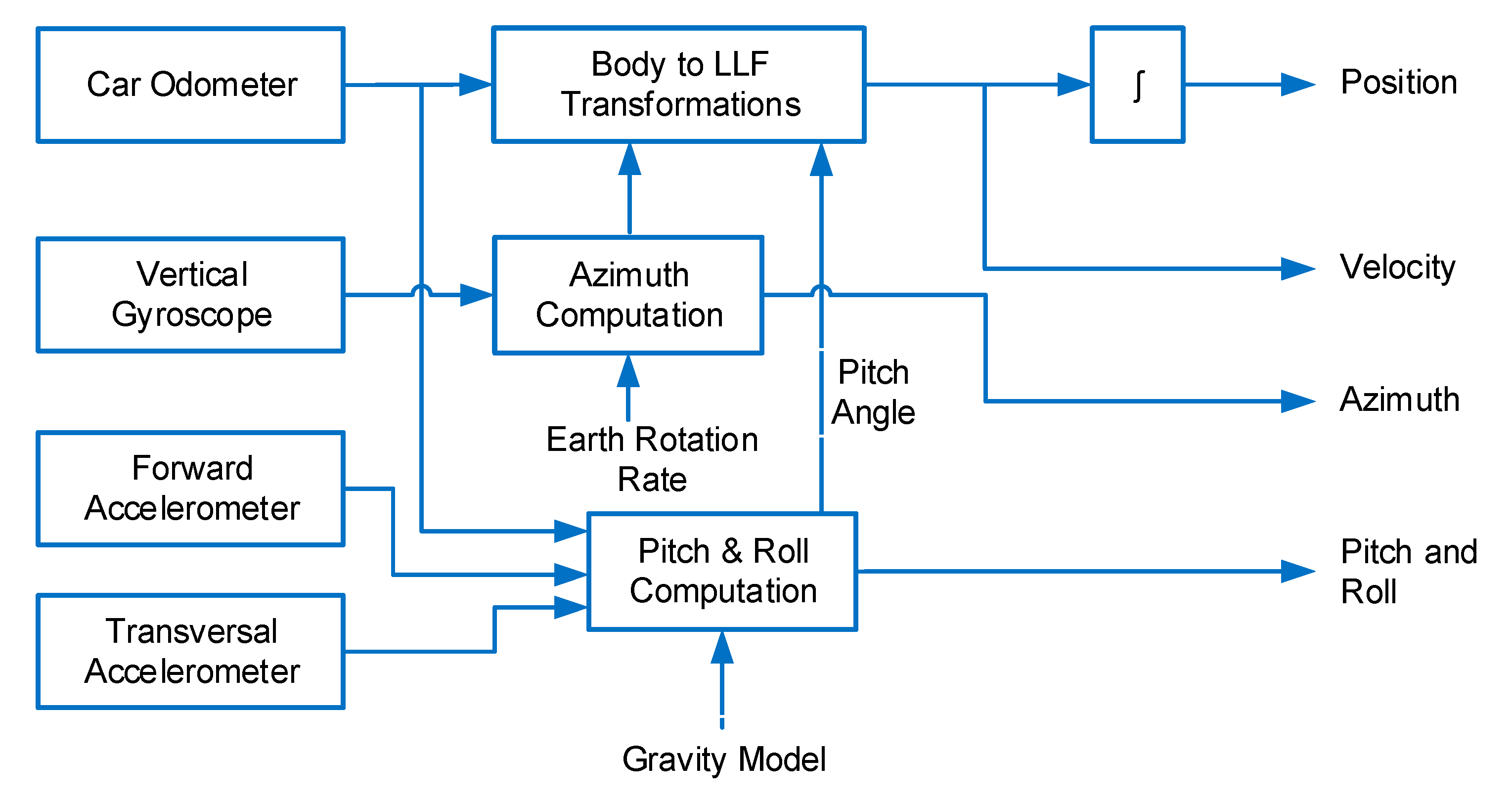
It was briefly mentioned above that the proposed method uses a 3D Reduced Inertial Sensor System (RISS) to develop a low-cost, simple, and efficient ultra-tightly coupled GPS/INS integrated system. Details about the origins of the adopted RISS system can be found in [
11,
12,
13]. The RISS system uses measurements from one gyroscope, two accelerometers, and the built-in car odometer to generate a 3D navigational solution. The gyroscope is aligned with the vertical axes of the vehicle frame; while, the two accelerometers are mounted to the forward and transversal directions, respectively. This simple configuration is popular due to the fact that it provides superior performance over traditional 3D IMU systems at a lower cost [
28].
2.1. RISS Motion Equations
The 3D RISS navigation state vector consists of nine parameters as the following:
where
and
are the position components, latitude, longitude, and altitude, respectively.
and
are the velocity components, east velocity, north velocity, and up velocity, respectively.
and
are the attitude components, roll, pitch, and azimuth, respectively. The calculations of the navigation solution are given in the next subsections. It should be mentioned here that the axes of the accelerometers and gyroscopes are set to match with the axes of the moving vehicle (the car in this application). Thus, a transformation operation is applied to obtain the navigation parameters with respect to a local-level frame (LLF) which represents the vehicle’s attitude and velocity information on or near the Earth’s surface.
2.2. Attitude Equations
First step is the azimuth angle calculation, which is obtained by removing the rotational components due to the transport rate and Earth rotation rate and then the integration of the gyroscope measurement. An assumption is set in land vehicle applications that vehicles are most of the time travelling in the horizontal plane. Hence, we can assume relatively small pitch and roll angles. Thus, the rate of change of the azimuth angle can be written as:
where
is the rate of change of the azimuth angle,
is gyroscope’s measurement,
is the gyroscope bias,
is latitude,
is east velocity,
is the Earth rotation rate,
is the altitude of the vehicle and
is the normal radius of the Earth’s ellipsoid.
Second, the pitch and roll angles are derived from accelerometer readings after compensating for accelerations due to forward speed and transversal acceleration component, respectively. The pitch angle is calculated as:
where
is the forward accelerometer measurement,
is the vehicle acceleration derived from the vehicle odometer, and
is the Earth’s gravity. The roll angle is calculated as:
where
is the transversal accelerometer measurement,
is the vehicle speed obtained from the vehicle odometer.
2.3. Velocity Equations
After the azimuth and pitch angles are obtained, forward vehicle velocity can be projected into East, North, and Up velocities as the following:
2.4. Position Equations
Finally, the horizontal velocity components are converted into geodetic coordinates and then integrated to obtain a horizontal position in latitude and longitude form. The Up velocity is integrated to obtain altitude.
where
is the Meridian radius of the Earth’s ellipsoid. A high-level diagram of RISS mechanization is given in
Figure 4.
4. Experiment Work
This research used both simulation and real signal data to help in the design and validation of proposed method.
Figure 6 illustrates experiment setup used in this research. For the GPS data, the GSS6700 Satellite Navigation Simulation Signal Generator, by Spirent, was used to design and generate the desired trajectory. The most important feature of the GSS6700 system is the repeatability function that enables it to provide wide dynamic capacity in GPS signal characteristics such as Doppler and signal power levels as well as enough channels to support in-view and multipath environments. To benefit from the trajectory scenarios generated by this system, it needs to be connected to a Front End (FE) unit. This research used the FireHose D17088, by NovAtel, as the front end unit to generate the in-phase (I), and quadrature-phase (Q) signals out of the data stream obtained from either the above-mentioned simulator or real trajectory data by connecting the unit to an antenna.
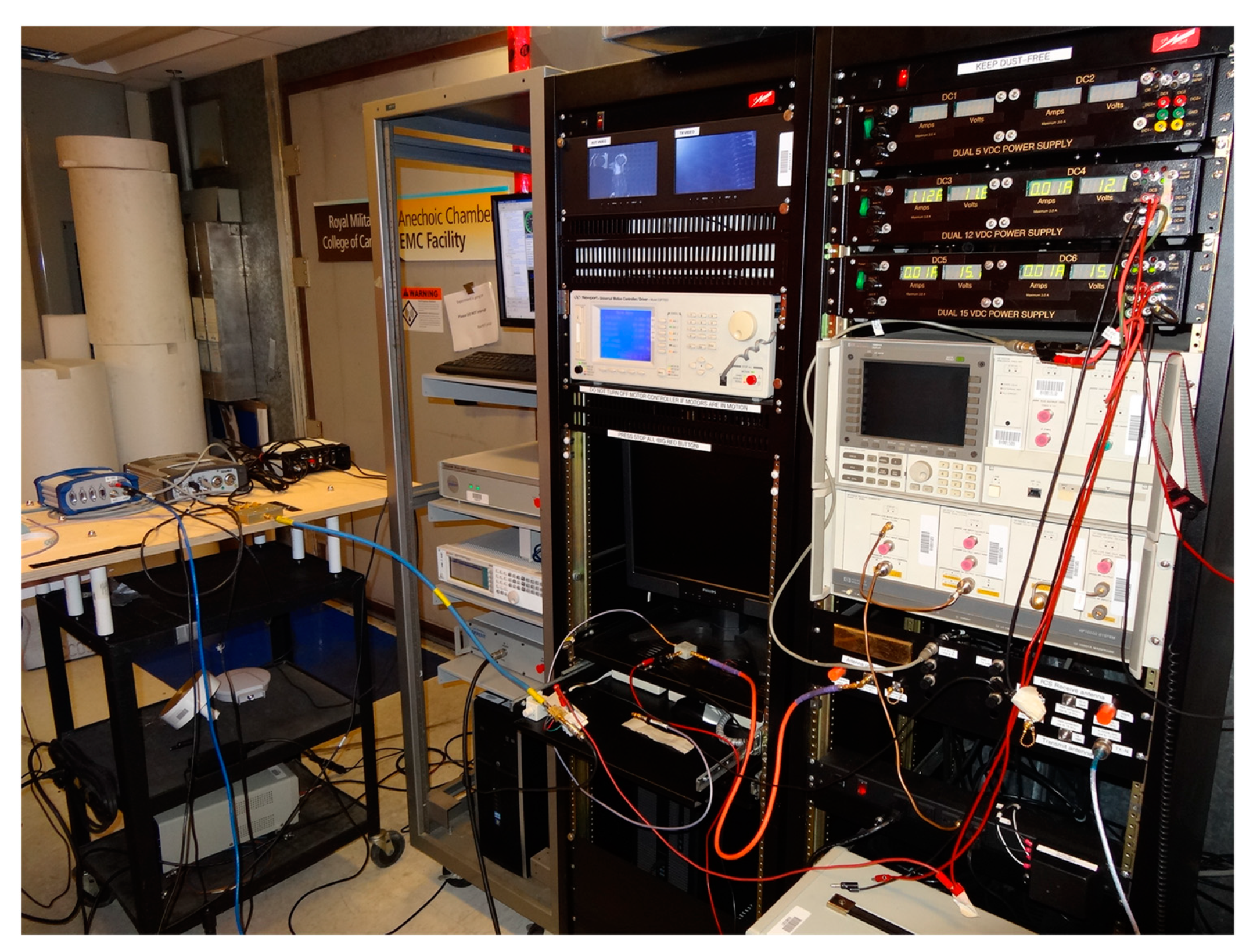
This research also comprises real GPS signal jamming experiments. This obviously requires the re-broadcast of the GPS signal to expose it to the real jammer signal. Thus, an exclusive and very interesting setup was built for this purpose. The real jamming signal experiments took place inside the Anechoic Chamber room at the Royal Military College of Canada (RMC). The room is designed with impenetrable walls and doors blocking any signals from entering or exiting the room. This guaranteed that the re-broadcast GPS signals and the real jammer signals could not penetrate to outside the room. The complete real jamming experiment setup is shown in
Figure 7.
Note the use of a power amplifier at the transmitter side instead of a low noise amplifier (LNA) since the GPS signal power is normally below the noise floor. On the contrary, an LNA is used at the receiver side which will significantly amplify the received low-power GPS signal while keeping the noise induced by its circuitry minimum. Real pictures of the transmitter and receiver antenna inside the room are shown in
Figure 8 and
Figure 9, respectively. A picture of most of the devices used outside of the room is shown in
Figure 10. The NovAtel NEAT jammer can work in high power and low power modes. Only low power mode has been used in this research. Furthermore, the device can generate four types of jamming signals: Narrow Band (NB), Wide Band (WB), Chirp, and Continues Wave (CW). The CW jamming type is chosen for the experiment shown in this work.
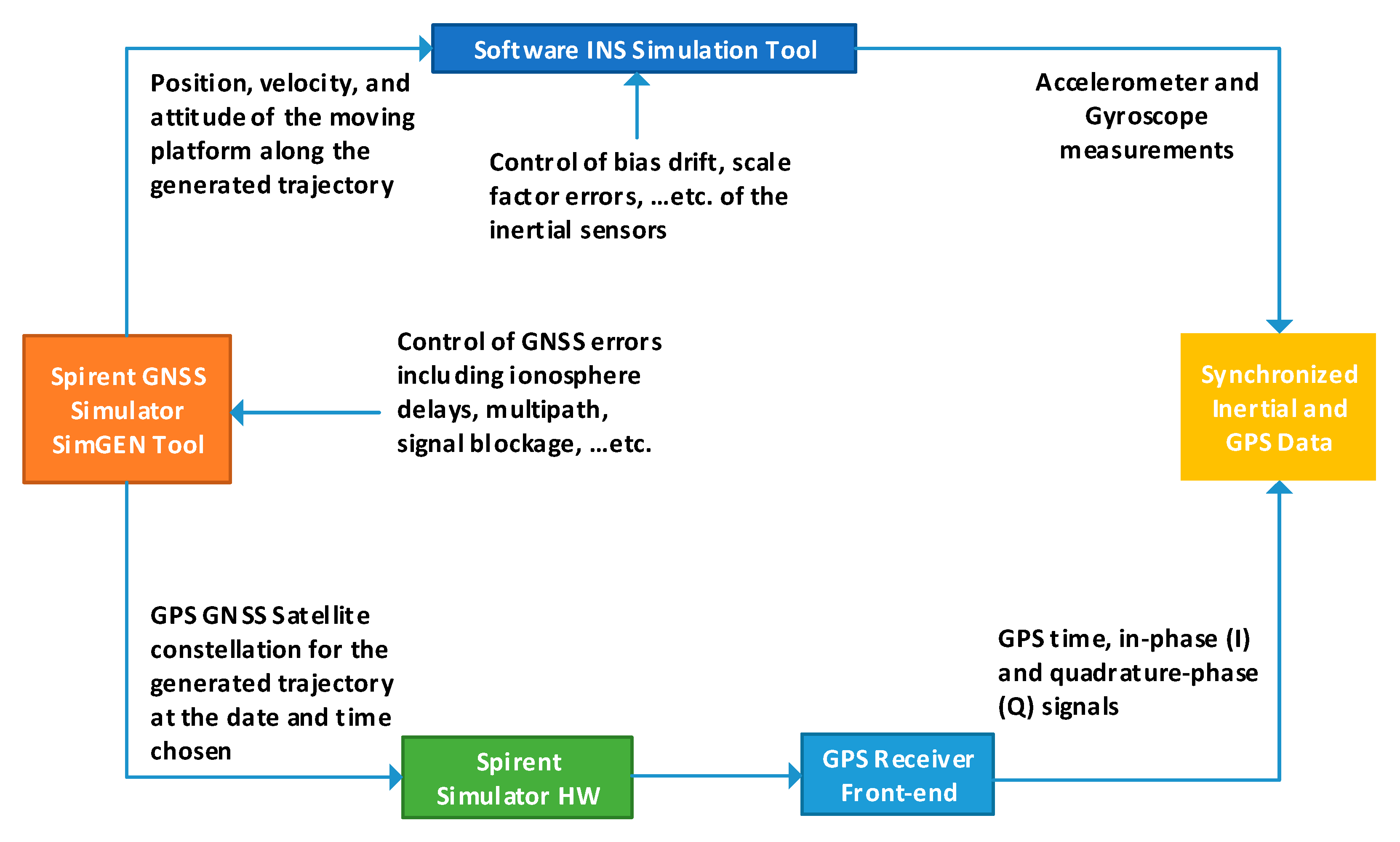
For the INS data sets, the INS Simulator, developed by the Mobile Multi-sensor Group at the University of Calgary, is used for simulating inertial measurement unit (IMU) raw data. This simulator can virtually generate the raw data measurements of any grade of IMUs such as navigation, tactical, and consumer-grade systems. While the simulator can generate raw IMU measurements using user-defined vehicle motion and dynamics, it can also accept externally injected vehicle dynamics from real trajectory data. The latter approach is used in this research.
Figure 11 shows a high-level diagram of the trajectory data flow from the two arms of the complete signal/data simulation system used for both GPS and INS systems. The simulation process happens in three main steps. Step one-trajectory design when the general aspects of the trajectory such as the type of platform to be simulated, the satellite constellation, and the trajectory environment, are outlined. All of this is done using the Spirent SimGEN
TM software. Step two incorporates the implementation of the selected scenario and generating the data stream that is fed into the signal generator hardware (Spirents GSS6700), which in turn transforms this into a Radio Frequency (RF) signal. At the same time, the reference trajectory data are logged on the same computer that hosts the SimGEN
TM simulation software. Additionally, the I and Q branches are recorded, concurrently with the reference trajectory, on a GNSS receiver front-end, the FireHose by NovAtel.
Finally, the inertial data are simulated in step number three. First, the INS simulator is configured according to the desired simulation parameters such as the sensor data rate, grade of the selected sensor(s), and some initialization quantities that are obtained from the output of the GNSS signal simulator.
5. Results and Analysis
The selected trajectory is a simulation of a land vehicle driving at a constant speed of 36 km/h. The total trajectory length is 15 min. However, data logging started at five minutes into the trajectory time. The first few minutes are skipped to let the logging equipment ease into a steady state while receiving signals from the simulation hardware. Thus, the last ten minutes of the trajectory data are processed. Nevertheless, only about nine-and-a-half minutes are shown in the figures since the focus here is on the tracking and navigation stages where the first 36 s are used to extract the navigation message before the receiver can generate a position solution.
The odometer data rate was set to 100 Hz with a correlation time of one hour for the scale factor (SF) error. The odometer white noise standard deviation is 0.01 m/s. settings for the inertial sensors’ errors are given in
Table 1.
GPS signal jamming is one of the most critical error sources affecting navigation solutions across the world. Moreover, recent research demonstrates that GNSS/INS integration is now more important than ever due to the known immunity of INS against most of GNSS error sources including signal interference and jamming. Thus, it is important to examine the performance of the proposed method under jamming conditions. A low-power Continuous Wave (CW) jamming signal is selected. In this scenario, a real jamming signal is broadcast inside the anechoic chamber room. The spectrum of this signal is shown in
Figure 12. This was obtained in the lab using a spectrum analyzer. From in lab analysis, and compared to a reference signal, it was found that the low power signal is about one Microwatt and the high-power signal is about one Milliwatt, millions of times stronger than a typical GPS signal. As can be seen
Figure 12, the central frequency is around 1.5754 GHz, which is at the central frequency of the GPS system. A CW signal should theoretically have no bandwidth but since the system is nonideal, it is showing a bandwidth of 2.4 kHz. The jammer was turned on for 90 s, commencing at about three minutes from the beginning of the trajectory.
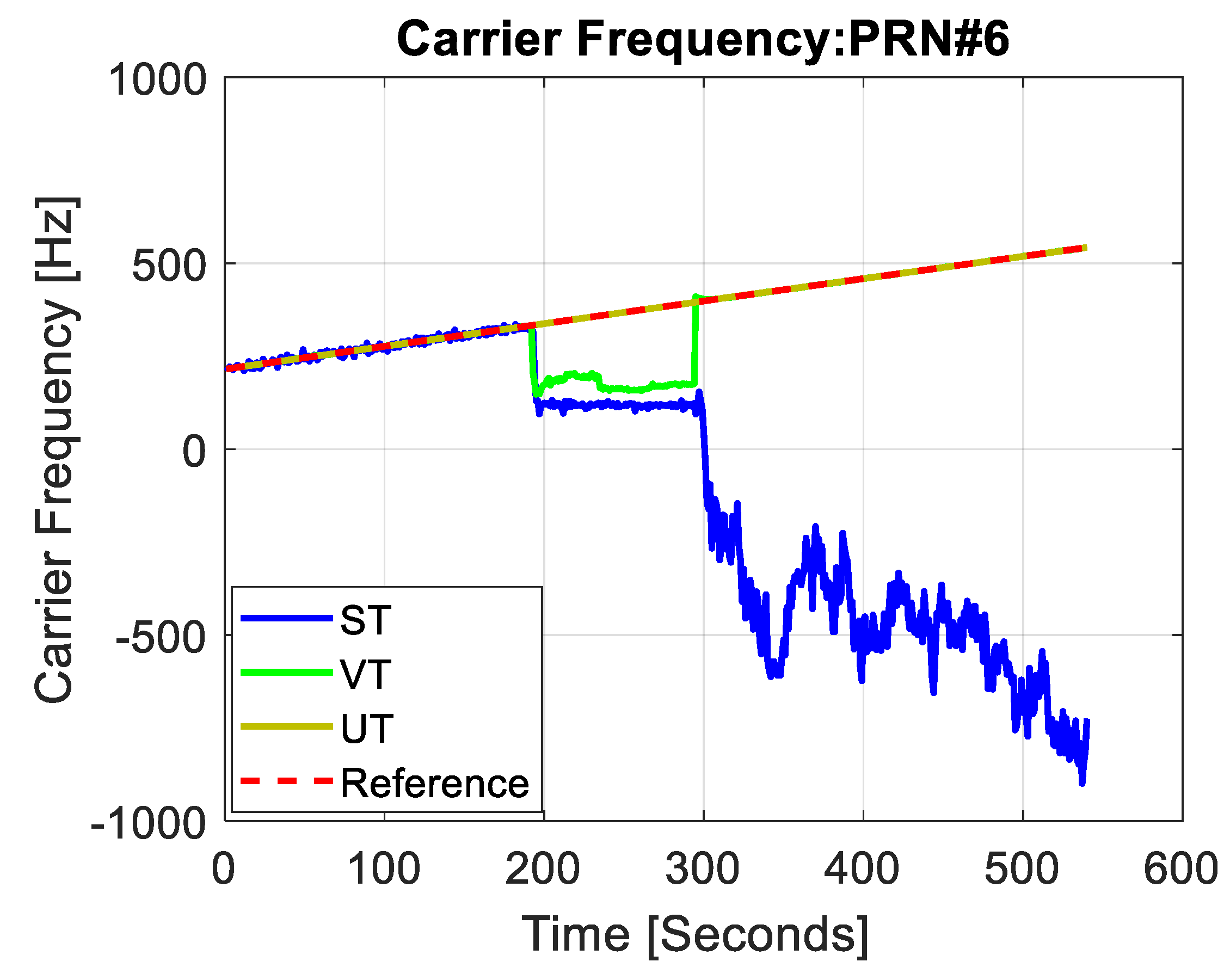
To make the discussion more valid, we here compare the performance of the introduced system versus a scalar tracking system (ST) and vector tracking system (VT), also implemented on the side of this work. Since the jamming signal frequency was around the GPS central frequency, most of the satellites in view were affected. Carrier frequencies of two sample satellites are shown in
Figure 13 and
Figure 14, respectively. The ST consequently lost track of some of the satellites leading to large position and velocity errors. The VT system was affected only when the jammer was on, but it immediately recovered tracking of all satellites signals once the jammer was off. This can be seen in the last two figures. The UT system experienced small errors and maintained the ability to track satellites signal even during the jamming period. The position and velocity error results for the three systems are summarized in
Table 2. The ST has dramatic errors in all position components. The position errors for the VT system are, however, still bound to a certain extent, even during the jamming scenario. The UT system shows a much higher resistance to the jamming effect, maintaining an acceptable solution throughout the trajectory.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}