Trajectory Linearization-Based Adaptive PLOS Path Following Control for Unmanned Surface Vehicle with Unknown Dynamics and Rudder Saturation



Abstract
:1. Introduction
- (1)
- An improved PLOS guidance law is constructed to calculate the desired heading angle and estimate unknown sideslip angle. Compared with [13], a fuzzy method is incorporated into the proposed PLOS guidance law to optimize the lookahead distance, thus achieving better convergence quality.
- (2)
- As a new control method in the USV motion control field, an enhanced TLC is adopted to design a concise path following controller for USV. Compared with traditional TLC, the enhanced TLC only needs one parameter to be adjusted.
- (3)
- Both unknown dynamics and disturbances can be estimated by constructing a neural network and LESO, respectively, and the rudder saturation is effectively resolved by using an auxiliary system.
2. Problem Formulation and Preliminaries
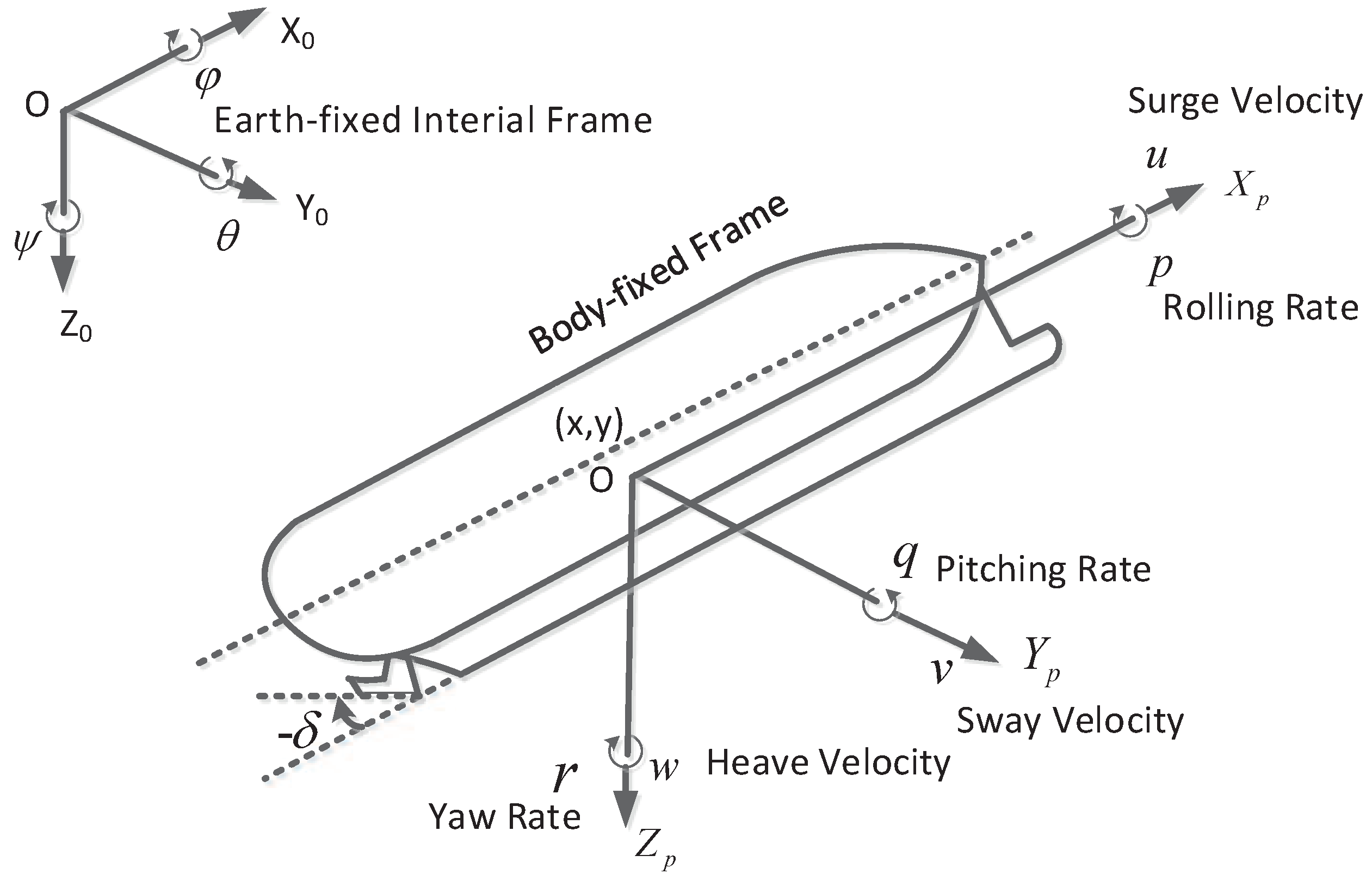
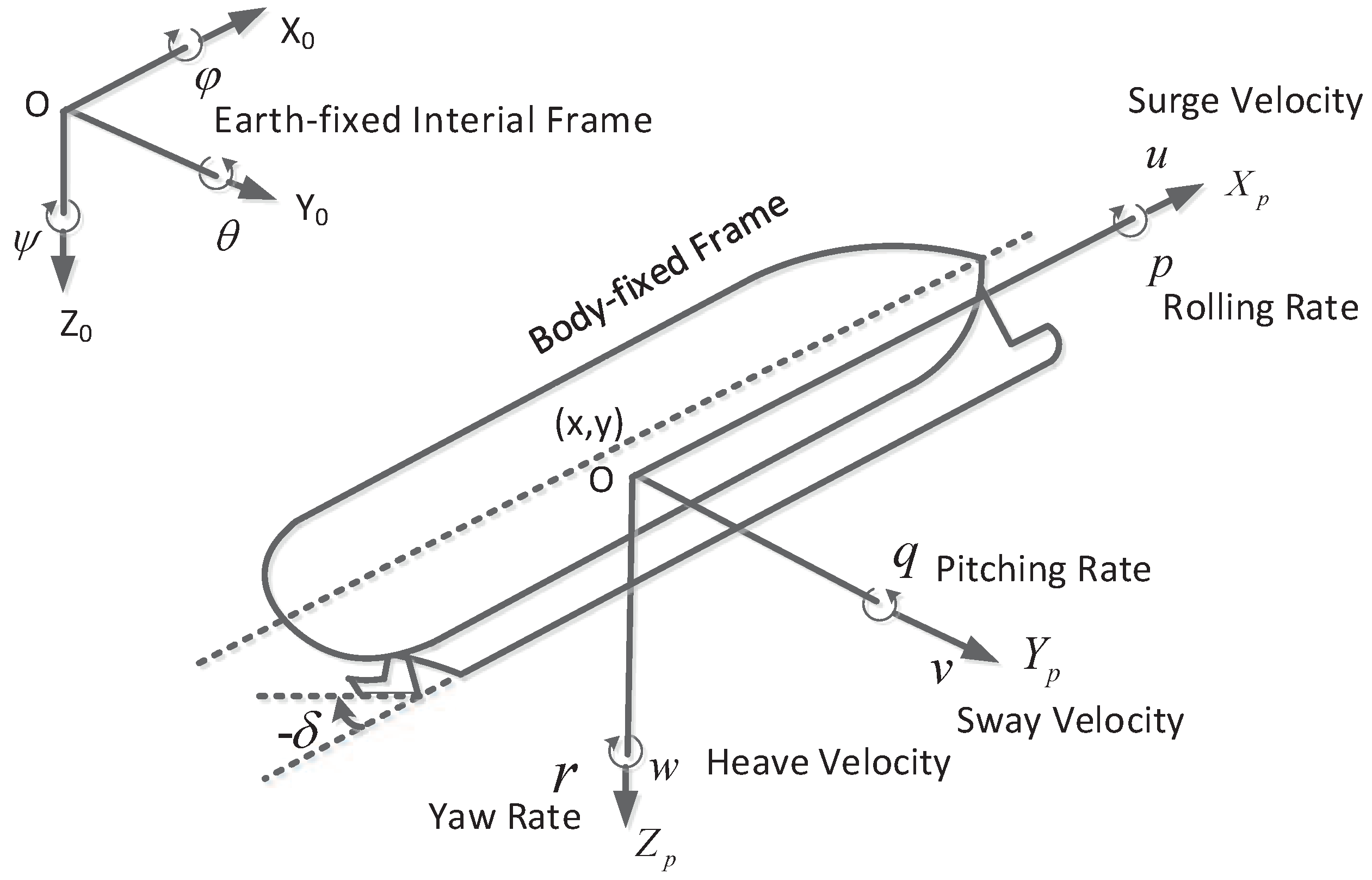
2.1. USV Model
2.2. Preliminaries
3. Path Following Control Strategy
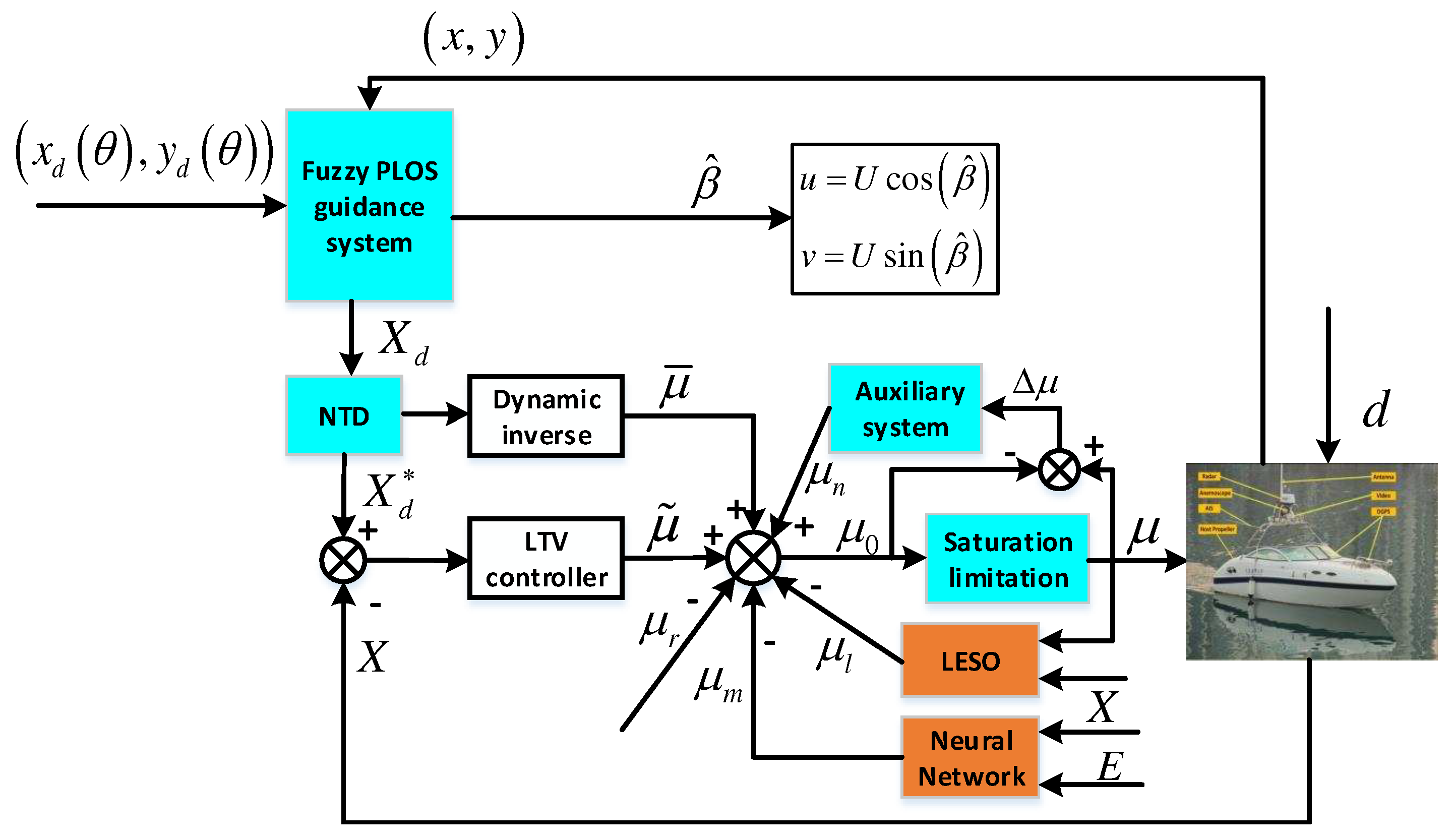
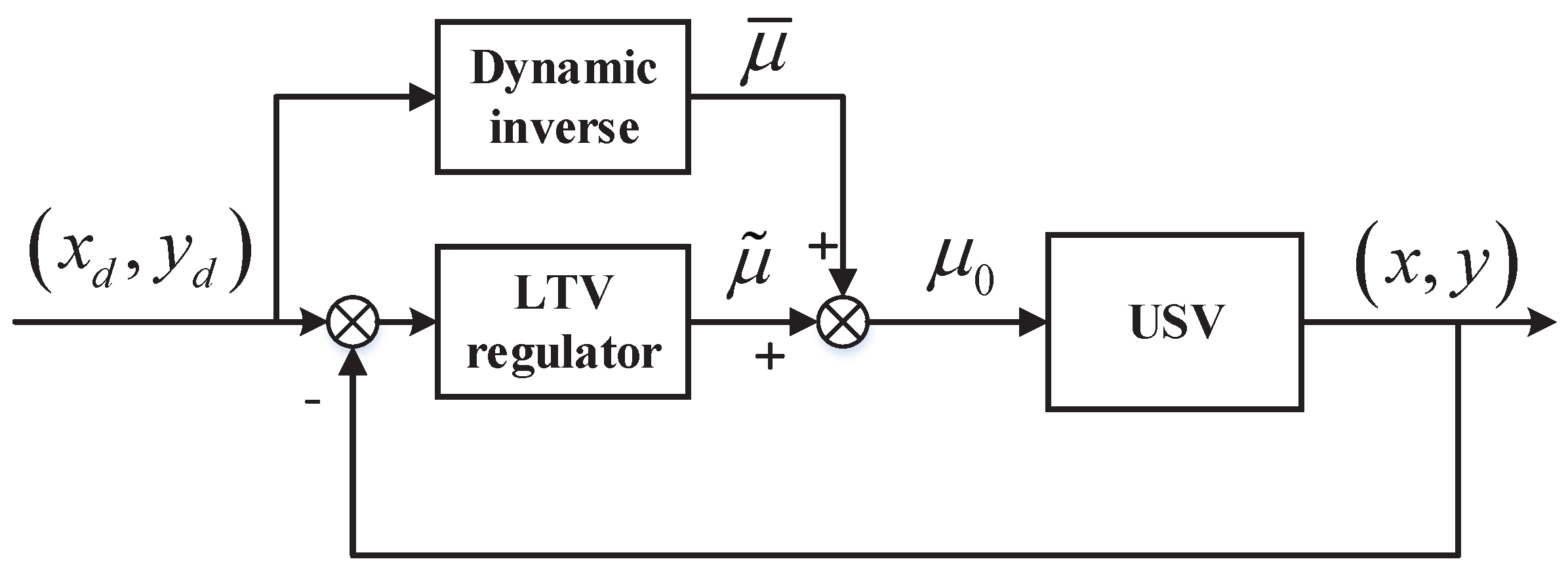
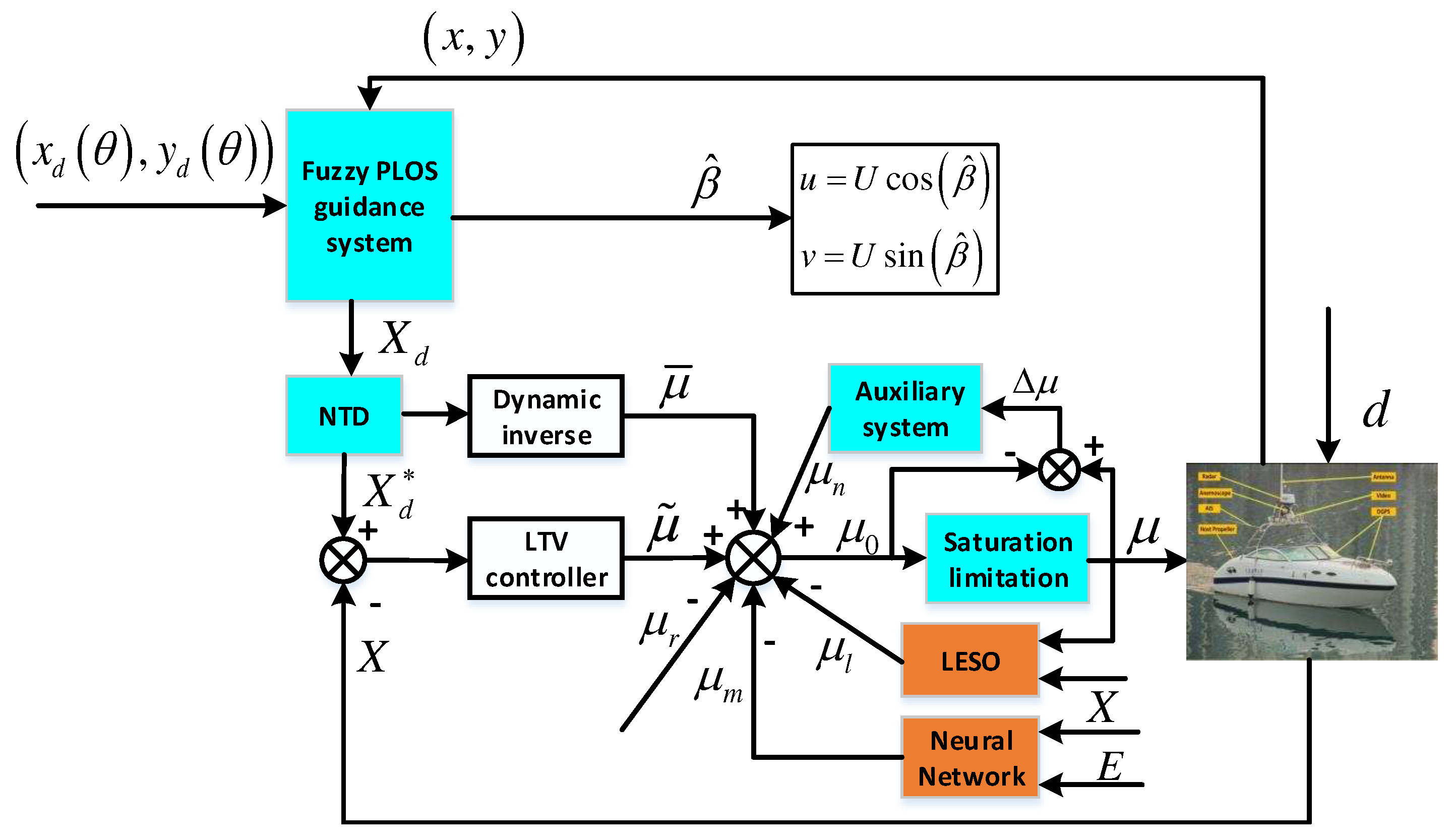
3.1. Structure of the Proposed Control Strategy
3.2. Guidance System Design
3.2.1. Estimation of Sideslip Angle
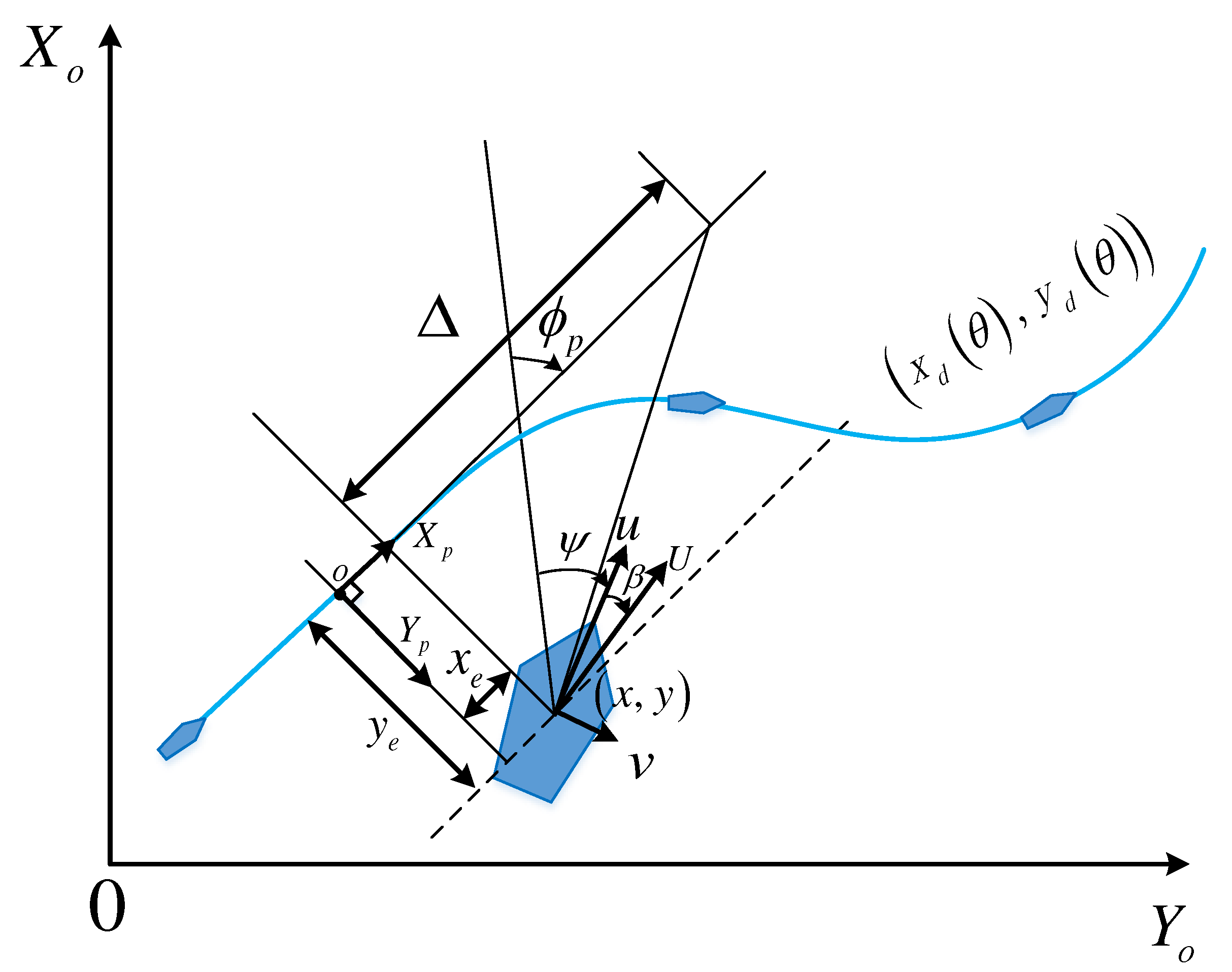
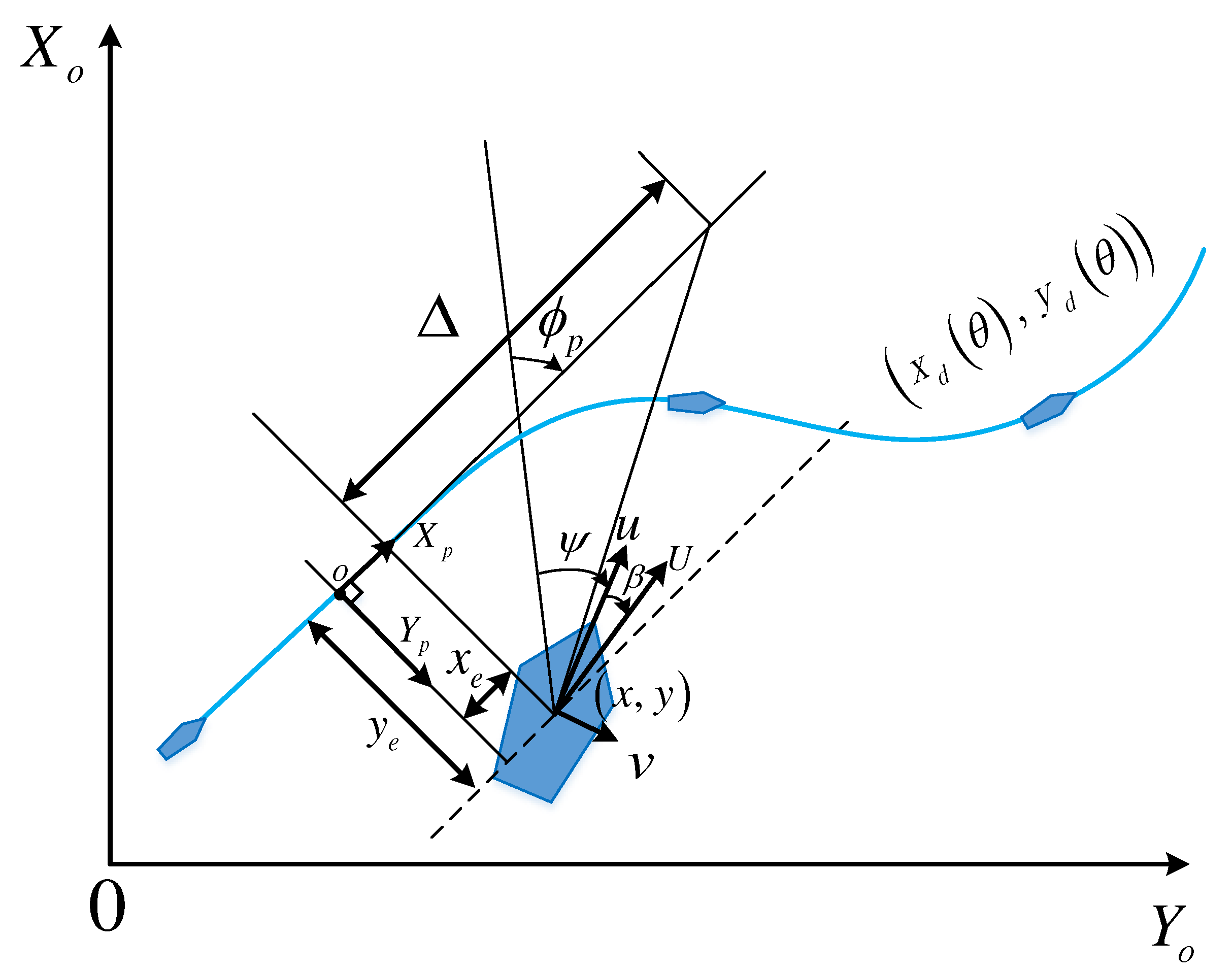
3.2.2. FPLOS Guidance Law
3.3. Composite Control Strategy
3.3.1. TLC Control Design
3.3.2. Adaptive Compensation Control Design
4. Stability Analysis
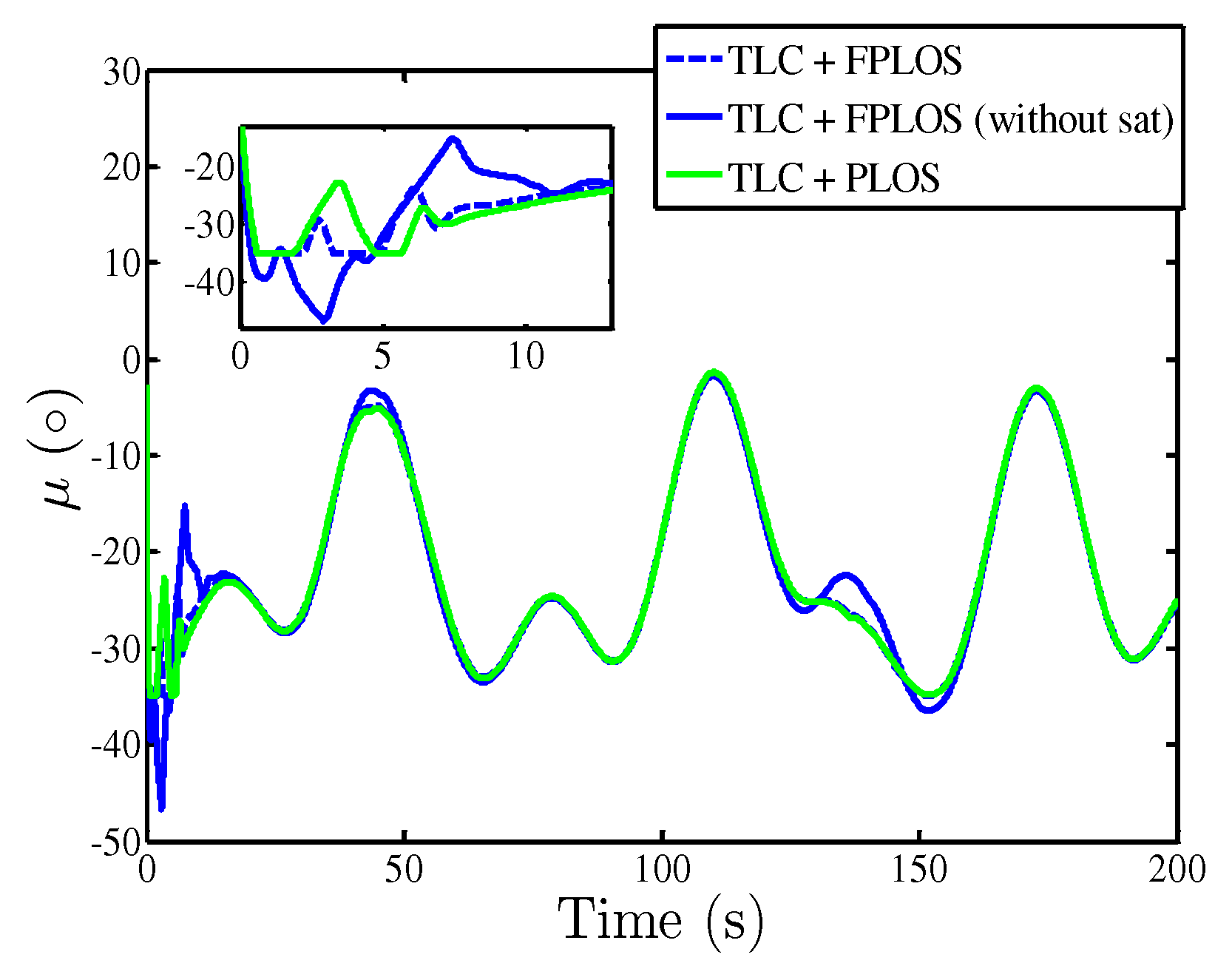
5. Numerical Simulations
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| USV | unmanned surface vehicle |
| TLC | trajectory linearization control |
| LESO | linear extended state observer |
| DSC | dynamic surface control |
| LOS | line-of-sight |
| PLOS | predictor line-of-sight |
| RBFNN | radial basis function neural network |
| NTD | nonlinear tracking differentiator |
| LTV | linear time-varying |
| UUB | uniformly ultimately bounded |
References
- Liu, Y.C.; Bucknall, R. Efficient multi-task allocation and path planning for unmanned surface vehicle in support of ocean operations. Neurocomputing 2018, 275, 142–149. [Google Scholar] [CrossRef]
- Song, R.; Liu, Y.; Bucknall, R. A multi-layered fast marching method for unmanned surface vehicle path planning in a time-variant maritime environment. Ocean Eng. 2018, 129, 301–317. [Google Scholar] [CrossRef]
- Zhao, Y.X.; Li, W.; Shi, P. A real-time collision avoidance learning system for Unmanned Surface Vessels. Neurocomputing 2016, 182, 255–266. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z.H. Path following of marine surface vehicles with dynamical uncertainty and time-varying ocean disturbances. Neurocomputing 2016, 173, 799–808. [Google Scholar] [CrossRef]
- Oh, S.R.; Sun, J. Path following of underactuated marine surface vessels using line-of-sight based model predictive control. Ocean Eng. 2010, 3, 289–295. [Google Scholar] [CrossRef]
- Peymani, E.; Fossen, T.I. Path following of underwater robots using Lagrange multipliers. Robot. Auton. Syst. 2015, 67, 44–52. [Google Scholar] [CrossRef]
- Zheng, Z.W.; Sun, L. Path following control for marine surface vessel with uncertainties and input saturation. Neurocomputing 2016, 177, 158–167. [Google Scholar] [CrossRef]
- Zhang, G.Q.; Zhang, X.K.; Zheng, Y.F. Adaptive neural path-following control for underactuated ships in fields of marine practice. Ocean Eng. 2015, 104, 558–567. [Google Scholar] [CrossRef]
- Paliotta, C.; Lefeber, E.; Pettersen, K.Y.; Pinto, J.; Costa, M. Trajectory Tracking and Path Following for Underactuated Marine Vehicles. IEEE Trans. Control Syst. Technol. 2019, 27, 1423–1437. [Google Scholar] [CrossRef] [Green Version]
- Fossen, T.I.; Lekkas, A.M. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents. Int. J. Adapt. Control Signal Process. 2017, 31, 445–463. [Google Scholar] [CrossRef]
- Zheng, Z.; Sun, L.; Xie, L.H. Error-Constrained LOS Path Following of a Surface Vessel with Actuator Saturation and Faults. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1794–1805. [Google Scholar] [CrossRef]
- Wang, N.; Sun, Z.; Yin, J.C.; Su, S.F.; Sharma, S. Finite-Time Observer Based Guidance and Control of Underactuated Surface Vehicles with Unknown Sideslip Angles and Disturbances. IEEE Access 2018, 6, 14059–14070. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z.H.; Wang, H. Predictor-based LOS guidance law for path following of underactuated marine surface vehicles with sideslip compensation. Ocean Eng. 2016, 124, 340–348. [Google Scholar] [CrossRef]
- Lekkas, A.M.; Fossen, T.I. Integral LOS path following for curved paths based on a monotone cubic Hermite spline parametrization. IEEE Trans. Control Syst. Technol. 2014, 22, 2287–2301. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z.H. ESO-Based Line-of-Sight Guidance Law for Path Following of Underactuated Marine Surface Vehicles with Exact Sideslip Compensation. IEEE J. Ocean. Eng. 2017, 42, 477–487. [Google Scholar] [CrossRef]
- Wang, N.; Sun, Z.; Zheng, Z.; Zhao, H. Finite-Time Sideslip Observer-Based Adaptive Fuzzy Path-Following Control of Underactuated Marine Vehicles with Time-Varying Large Sideslip. Int. J. Fuzzy Syst. 2018, 20, 1767–1778. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control Syst. Technol. 2015, 23, 820–827. [Google Scholar] [CrossRef] [Green Version]
- Peng, Z.; Wang, J.; Wang, D. Distributed Maneuvering of Autonomous Surface Vehicles Based on Neurodynamic Optimization and Fuzzy Approximation. IEEE Trans. Control Syst. Technol. 2017, 99, 1–8. [Google Scholar] [CrossRef]
- Wang, N.; Meng, J.E. Direct Adaptive Fuzzy Tracking Control of Marine Vehicles With Fully Unknown Parametric Dynamics and Uncertainties. IEEE Trans. Control Syst. Technol. 2016, 24, 1845–1852. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Sun, X.; Qiu, B. Adaptive LOS Path Following for a Podded Propulsion Unmanned Surface Vehicle with Uncertainty of Model and Actuator Saturation. Appl. Sci. 2017, 7, 1232. [Google Scholar] [CrossRef] [Green Version]
- Shao, X.; Wang, H. Active disturbance rejection based trajectory linearization control for hypersonic reentry vehicle with bounded uncertainties. ISA Trans. 2015, 54, 27–38. [Google Scholar] [CrossRef] [PubMed]
- Shao, X.; Wang, H. Back-stepping robust trajectory linearization control for hypersonic reentry vehicle via novel tracking differentiator. J. Frankl. Inst. 2016, 353, 1957–1984. [Google Scholar] [CrossRef]
- Wang, N.; Er, M.J.; Sun, J.C.; Liu, Y.C. Adaptive Robust Online Constructive Fuzzy Control of a Complex Surface Vehicle System. IEEE Trans. Cybern. 2016, 46, 1511–1523. [Google Scholar] [CrossRef] [PubMed]
- He, W.; Dong, Y.; Sun, C. Adaptive Neural Impedance Control of a Robotic Manipulator With Input Saturation. IEEE Trans. Syst. Man Cybern. Syst. 2017, 46, 334–344. [Google Scholar] [CrossRef]
- Yu, Y.; Guo, C.; Yu, H. Finite-time predictor line-of-sight-based adaptive neural network path following for unmanned surface vessels with unknown dynamics and input saturation. Int. J. Adv. Robot. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Zheng, Z.; Feroskhan, M. Path Following of a Surface Vessel With Prescribed Performance in the Presence of Input Saturation and External Disturbances. ASME Trans. Mechatron. 2017, 22, 2564–2575. [Google Scholar] [CrossRef]
- Du, J.; Hu, X.; Sun, Y. Adaptive Robust Nonlinear Control Design for Course Tracking of Ships Subject to External Disturbances and Input Saturation. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 193–202. [Google Scholar] [CrossRef]
- Zhu, G.; Du, J. Global Robust Adaptive Trajectory Tracking Control for Surface Ships Under Input Saturation. IEEE J. Ocean. Eng. 2018, 45, 442–450. [Google Scholar] [CrossRef]
- Mu, D.; Wang, F.; Fan, Y.; Qiu, B.; Sun, X. Adaptive course control based on trajectory linearization control for unmanned surface vehicle with unmodeled dynamics and input saturation. Neurocomputing 2019, 330, 1–10. [Google Scholar] [CrossRef]
- Breivik, M.; Hovstein, V.E.; Fossen, T.I. Straight-line target tracking for unmanned surface vehicles. Model. Identif. Control 2008, 29, 131–149. [Google Scholar] [CrossRef] [Green Version]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: New York, NY, USA, 1996. [Google Scholar]
- Mickle, M.C.; Zhu, J.J. Skid to turn control of the APKWS missile using trajectory linearization technique. In Proceedings of the 2001 American Control Conference, Arlington, VA, USA, 25–27 June 2001; Volume 5, pp. 3346–3351. [Google Scholar]
- Zhu, B.; Huo, W. Adaptive Trajectory Linearization Control for a model-scaled helicopter with uncertain inertial parameters. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; Volume 5, pp. 4389–4395. [Google Scholar]
- Adami, T.M.; Zhu, J. 6DOF flight control of fixed-wing aircraft by Trajectory Linearization. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 1610–1617. [Google Scholar]
- Chen, Y.; Zhu, J. Car-like ground vehicle trajectory tracking by using trajectory linearization control. In Proceedings of the ASME 2017 Dynamic Systems and Control Conference, Tysons, VA, USA, 11–13 October 2017; Volume 2. [Google Scholar]
- Huang, J.T. Global tracking control of strict-feedback systems using neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 1714–1725. [Google Scholar] [CrossRef] [PubMed]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Qiu, B.; Wang, G.; Fan, Y. Robust Adaptive Trajectory Linearization Control for Tracking Control of Surface Vessels with Modeling Uncertainties under Input Saturation. IEEE Access 2019, 7, 5057–5070. [Google Scholar] [CrossRef]
- Lin, Y.; Du, J.; Niu, J. Design of Backstepping based adaptive robust nonlinear controller of ship course. Ship Eng. 2007, 29, 24–27. [Google Scholar]
- Guerra, E.H.; Quiza, R.; Villalonga, A.; Arenas, J.; Castano, F. Digital Twin-Based Optimization for Ultraprecision Motion Systems with Backlash and Friction. IEEE Access 2019, 7, 93462–93472. [Google Scholar] [CrossRef]
- Beruvides, G.; Juanes, C.; Castano, F.; Haber, R.E. A self-learning strategy for artificial cognitive control systems. In Proceedings of the 2015 IEEE 13th International Conference on Industrial Informatics (INDIN), Cambridge, UK, 22–24 July 2015; pp. 1180–1185. [Google Scholar]
- Martin, A.G.; Guerra, E.H. Internal model control based on a neurofuzzy system for network applications. A case study on the high-performance drilling process. IEEE Trans. Autom. Sci. Eng. 2009, 6, 367–372. [Google Scholar] [CrossRef]
- Guerra, E.H.; Alique, A.; Alique, J.R. Tool wear prediction in milling using neural networks. Lect. Notes Comput. Sci. 2002, 2415, 807–812. [Google Scholar]
- Ebrahimi, Z.; Shahabi, H.; Soltani, M. Reinforcement learning for optimal scheduling of Glioblastoma treatment with Temozolomide. Comput. Methods Programs Biomed. 2020, 193, 105443. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value | ||||||
|---|---|---|---|---|---|---|
| Method | ||||||
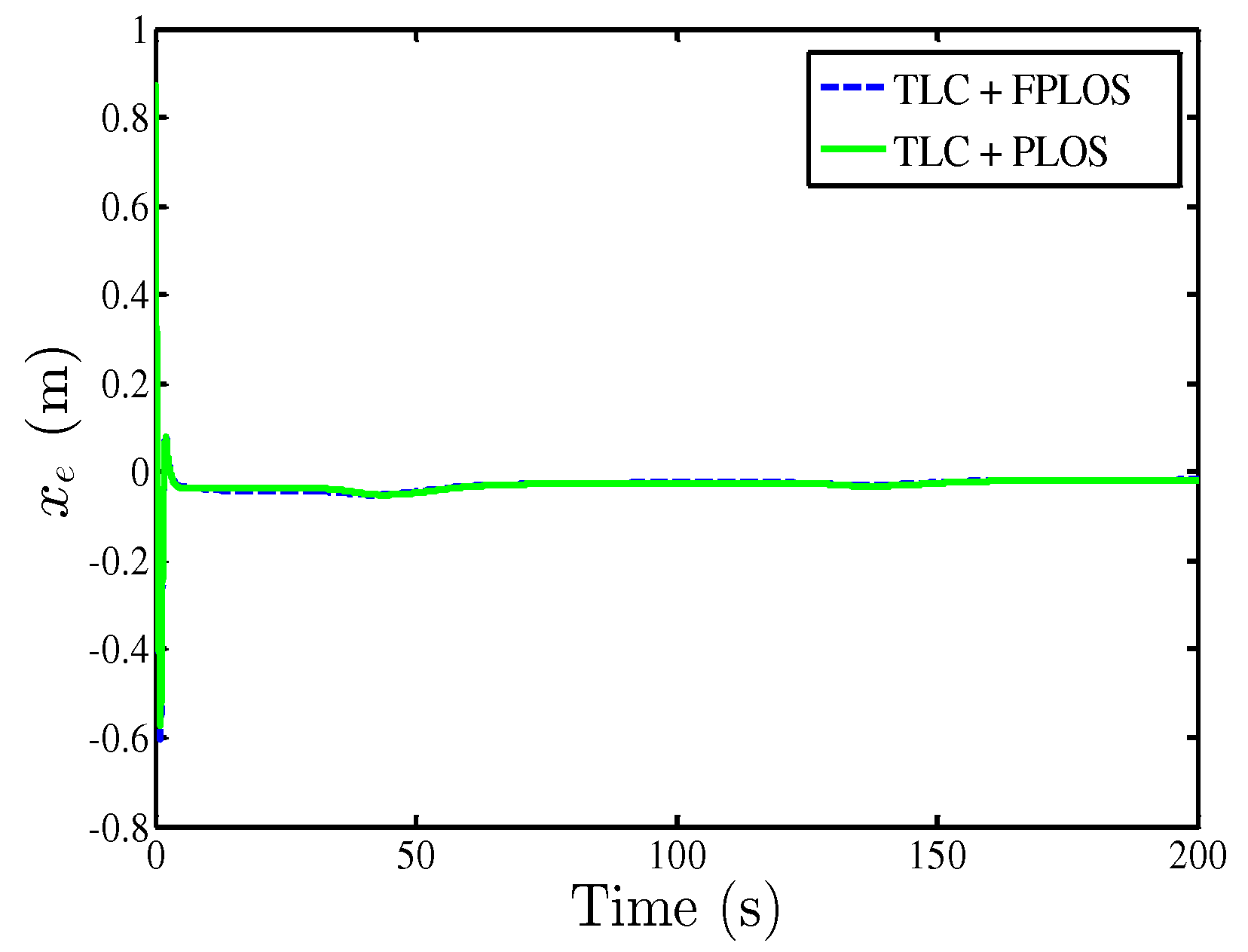
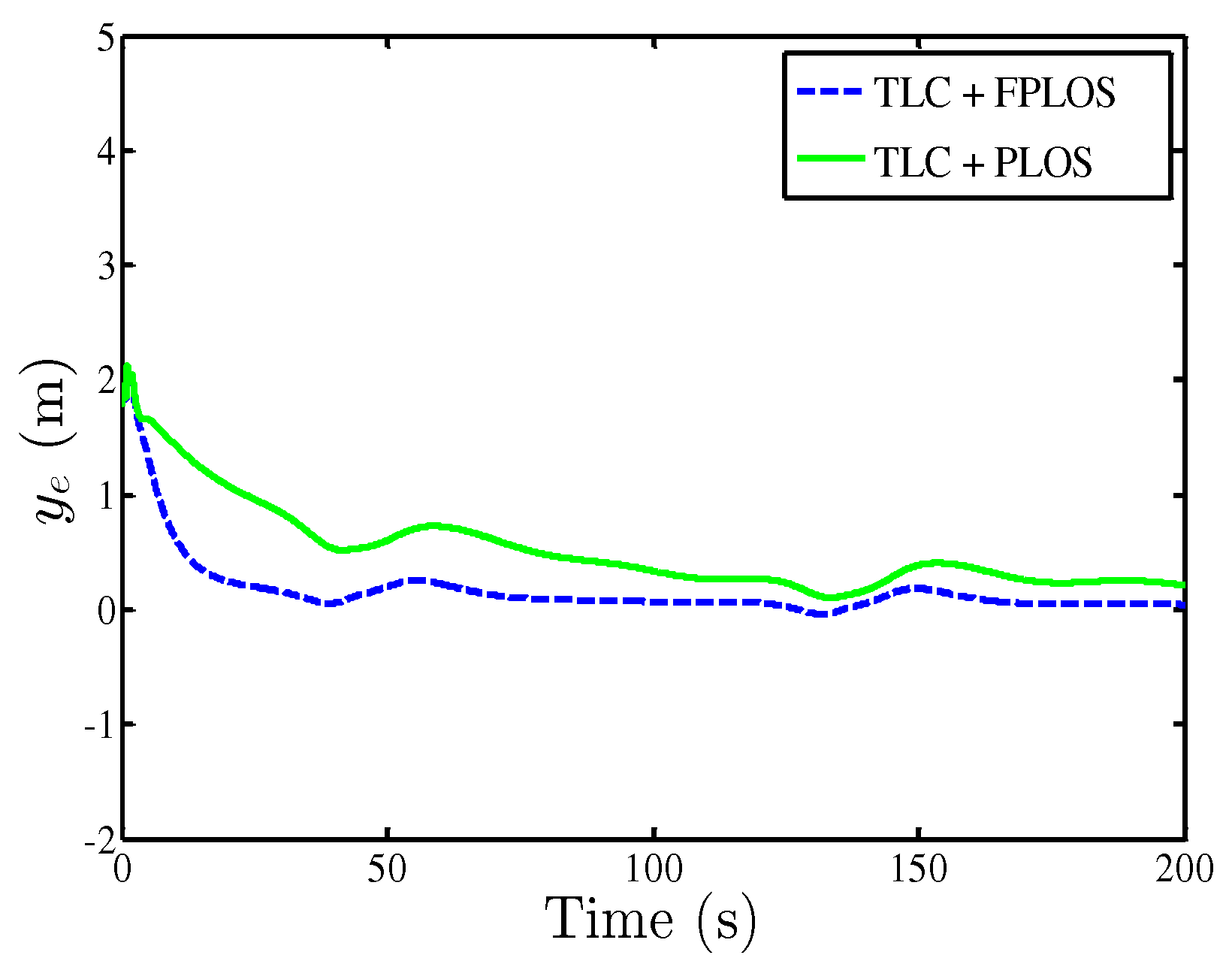
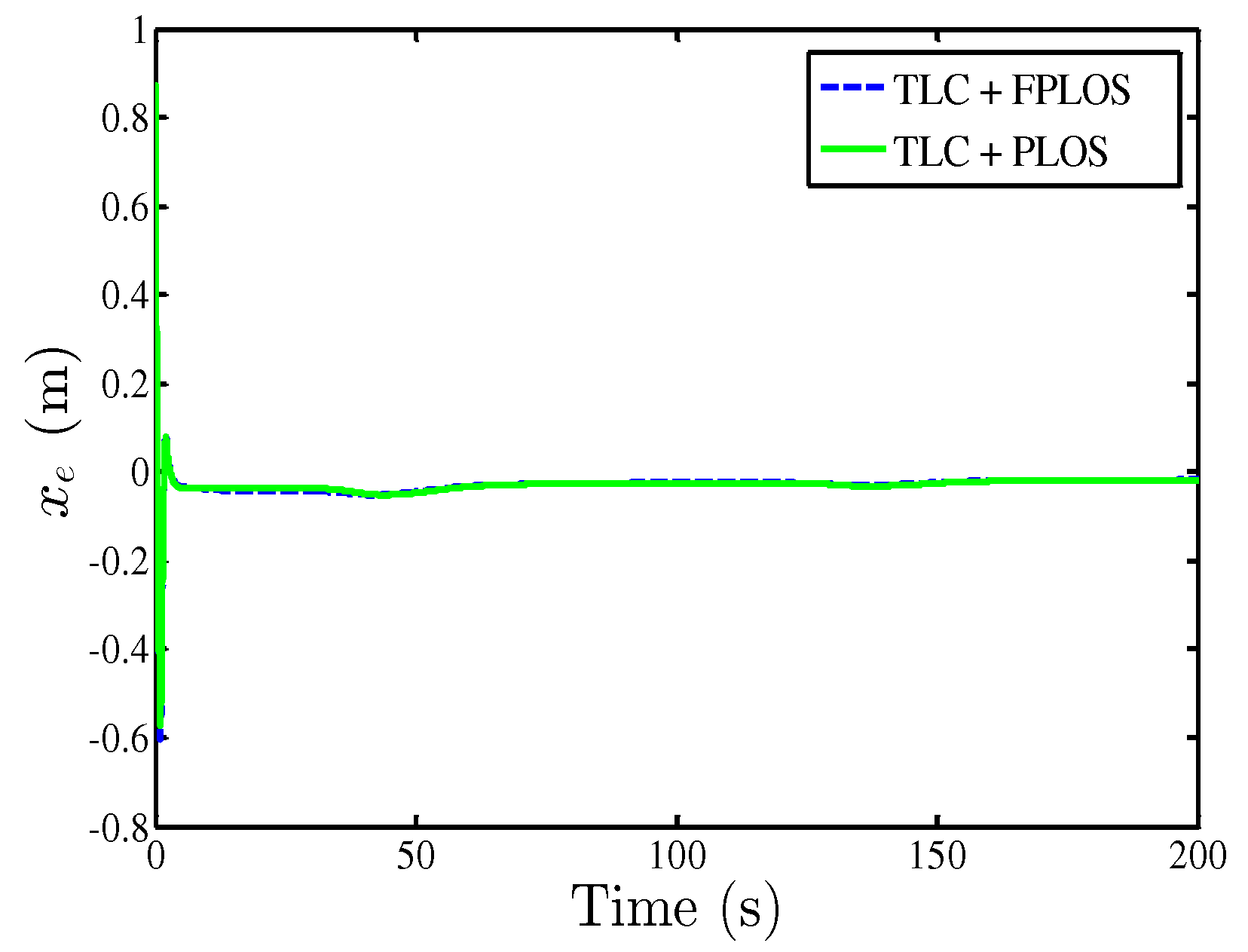
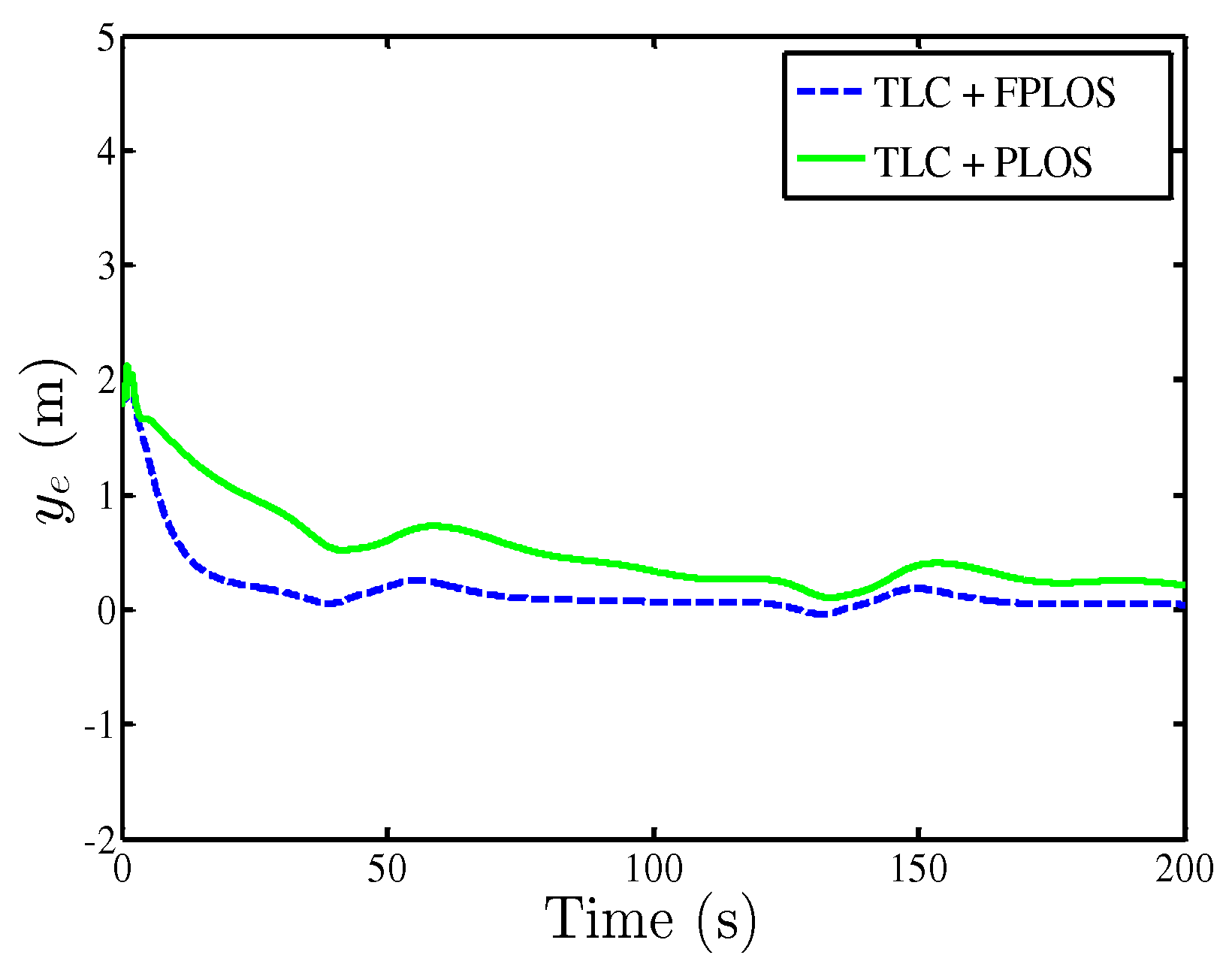
| TLC + FPLOS | 0.04941 | 0.3473 | 0.06539 | 0.03204 | 0.176 | 0.0139 |
| TLC + PLOS | 0.5242 | 0.6508 | 0.07489 | 0.04284 | 0.523 | 0.04631 |
| Value | ||||||
|---|---|---|---|---|---|---|
| Method | ||||||
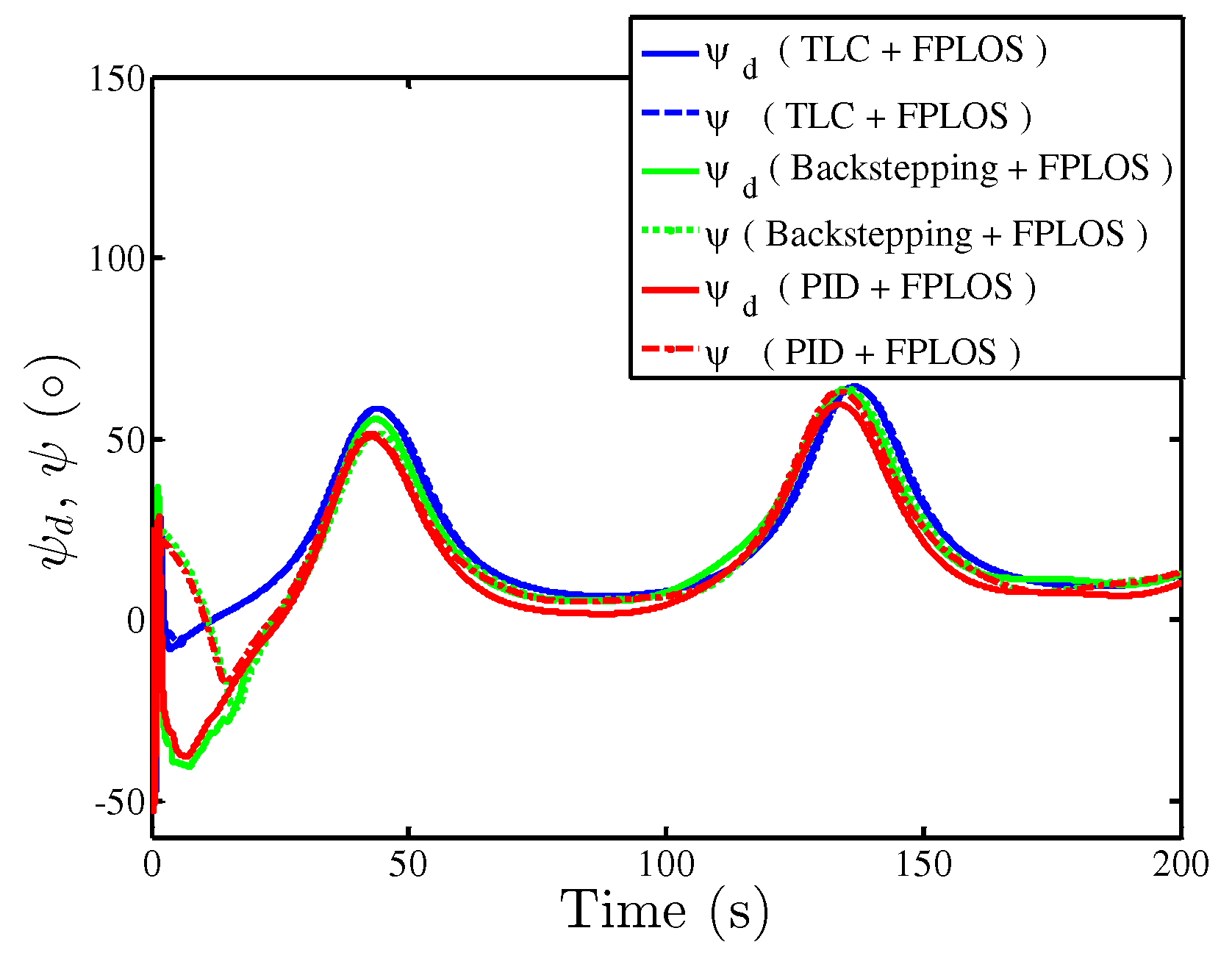
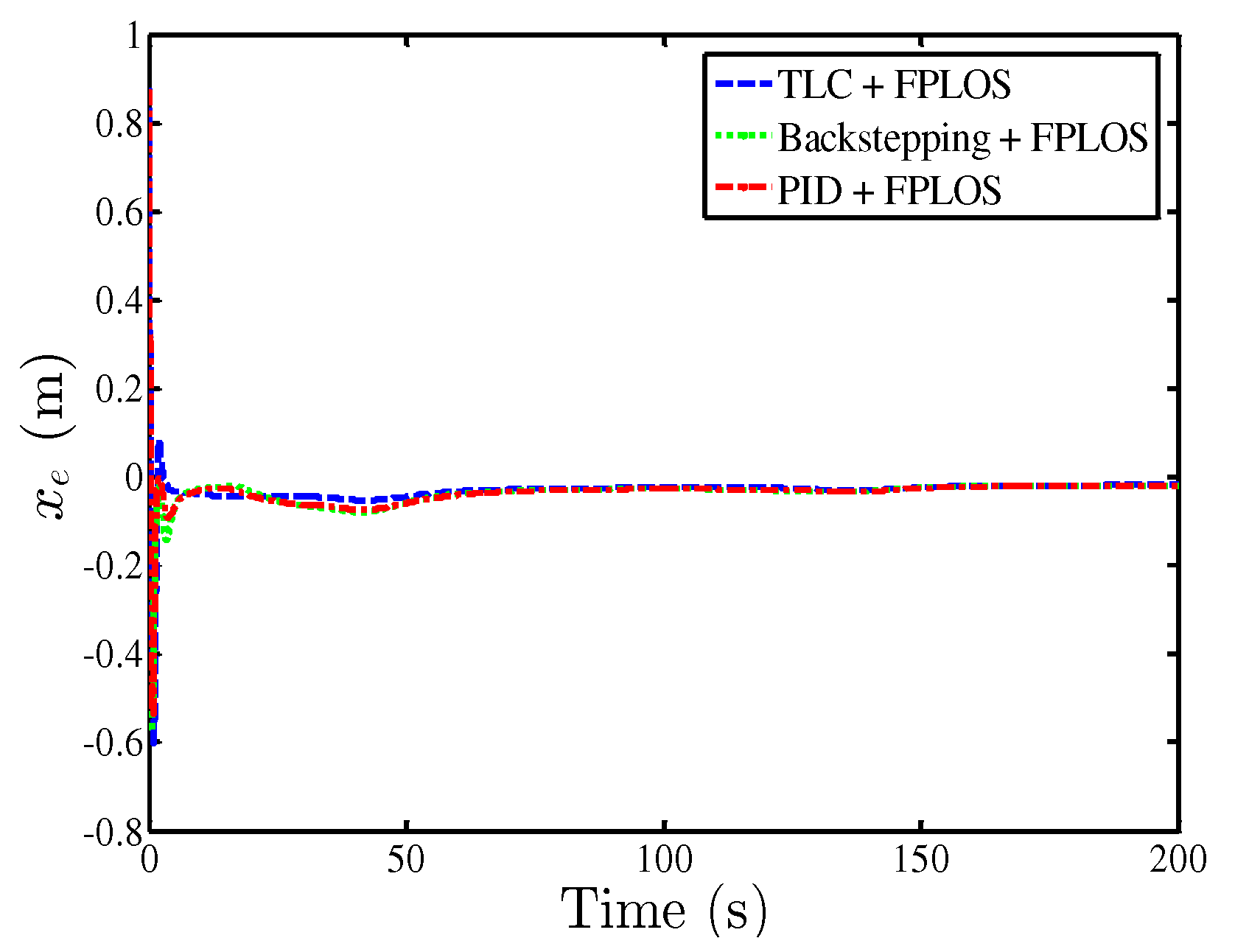
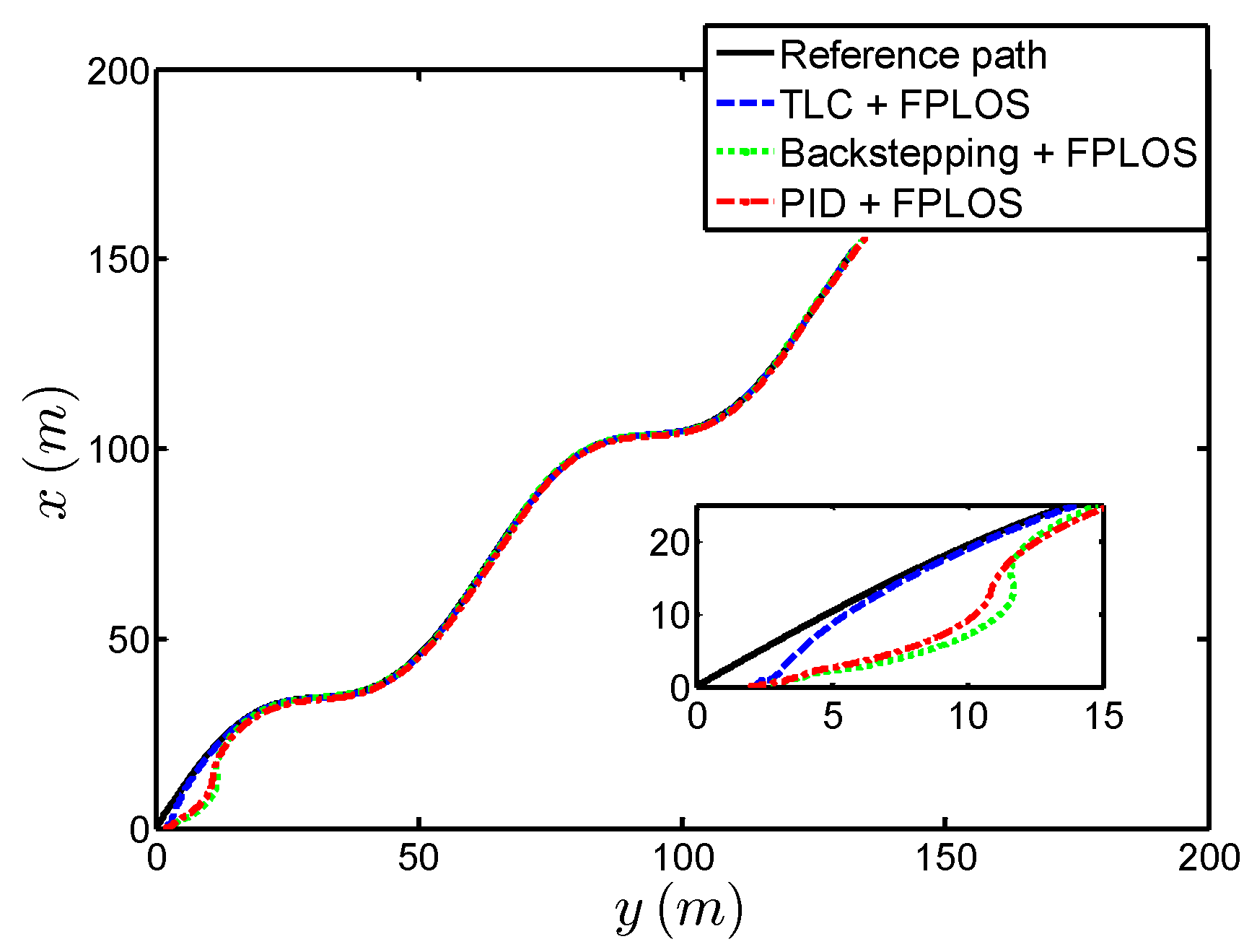
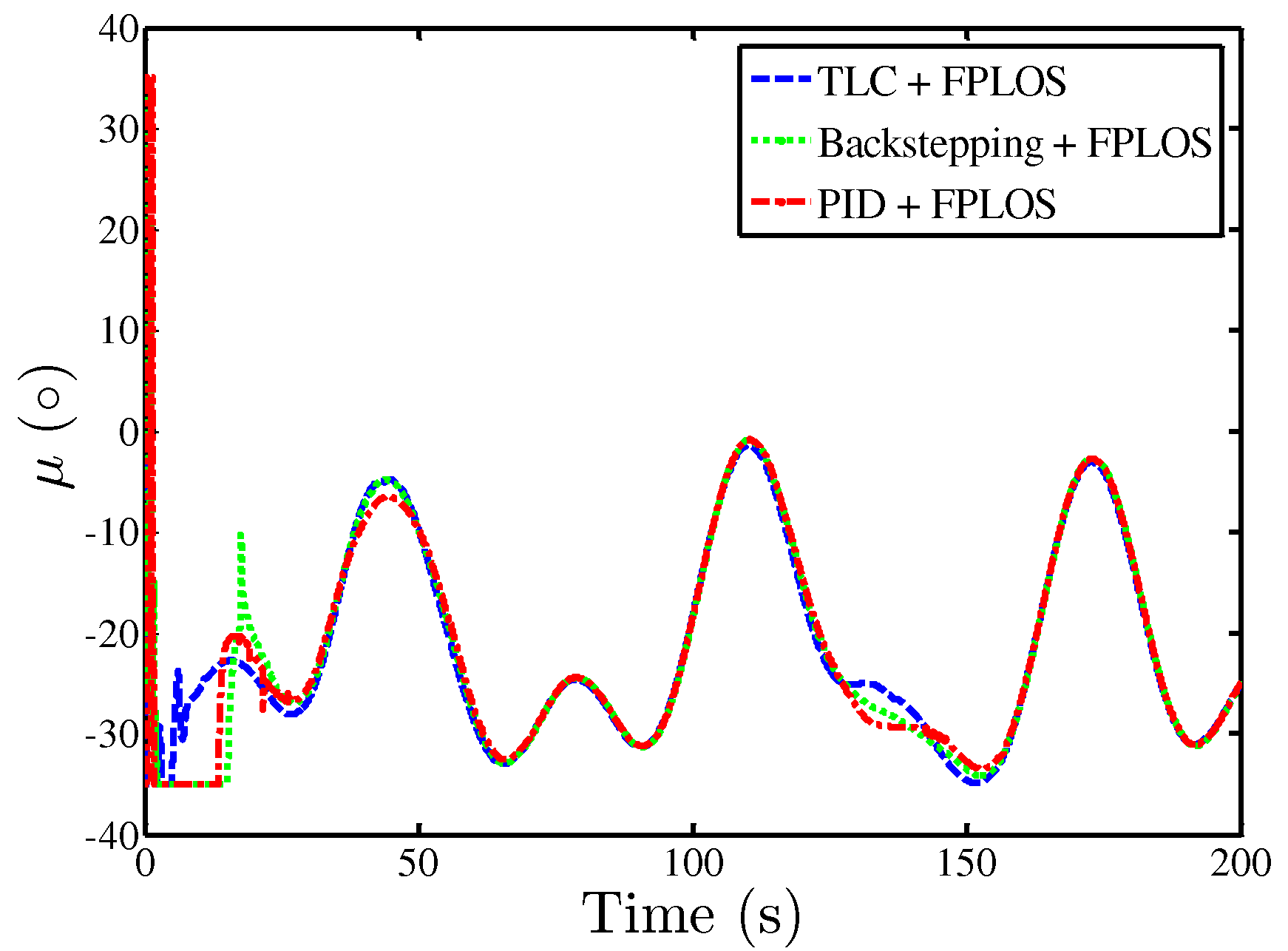
| TLC + FPLOS | 0.04941 | 0.3473 | 0.06539 | 0.03204 | 0.176 | 0.0139 |
| Backstepping + FPLOS | 0.05564 | 1.501 | 0.2142 | 0.03753 | 0.6259 | 0.08243 |
| PID + FPLOS | 0.0549 | 1.354 | 0.191 | 0.0376 | 0.797 | 0.0864 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, B.; Wang, G.; Fan, Y. Trajectory Linearization-Based Adaptive PLOS Path Following Control for Unmanned Surface Vehicle with Unknown Dynamics and Rudder Saturation. Appl. Sci. 2020, 10, 3538. https://doi.org/10.3390/app10103538
Qiu B, Wang G, Fan Y. Trajectory Linearization-Based Adaptive PLOS Path Following Control for Unmanned Surface Vehicle with Unknown Dynamics and Rudder Saturation. Applied Sciences. 2020; 10(10):3538. https://doi.org/10.3390/app10103538
Chicago/Turabian StyleQiu, Bingbing, Guofeng Wang, and Yunsheng Fan. 2020. "Trajectory Linearization-Based Adaptive PLOS Path Following Control for Unmanned Surface Vehicle with Unknown Dynamics and Rudder Saturation" Applied Sciences 10, no. 10: 3538. https://doi.org/10.3390/app10103538
APA StyleQiu, B., Wang, G., & Fan, Y. (2020). Trajectory Linearization-Based Adaptive PLOS Path Following Control for Unmanned Surface Vehicle with Unknown Dynamics and Rudder Saturation. Applied Sciences, 10(10), 3538. https://doi.org/10.3390/app10103538