In this section, the underlying physical mechanism behind thermal-induced measurement errors is discussed in detail. It is the theoretical principle for establishing temperature compensation methods. First, we determined the thermal behaviours of camera components that may lead to thermal-induced errors and established a physical model to illustrate the relationship between these thermal behaviours and the image error based on optical imaging relationships. Then, the thermal responses of each thermal behaviour of the investigated digital camera system (consisting of an IPX-16M3-L charged coupled device (CCD) camera and Sigma macro 105-mm F2.8DG lens) to temperature were measured via calibration experiments, and the specific model for thermal-induced image errors was developed and verified using the previously mentioned camera system. Lastly, we derived the relationship between the image error and measurement error to establish the relationship between the measurement error and temperature.
2.1. Modeling of the Image Error
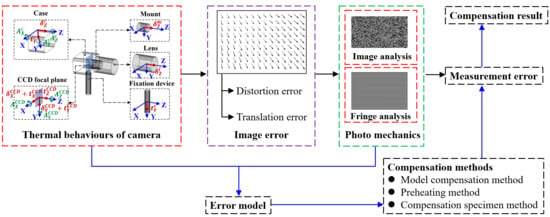
A typical digital camera system widely used in photo mechanics measurements is mainly composed of a camera case, mount, lens, CCD focal plane, and mechanical device used to fasten the camera. Once the camera system starts operating, the heat transfer caused by the coupling effect of its self-heating and the environmental temperature will lead to temperature variations and further generate thermal behaviours of the previously mentioned components. The thermal behaviours that may cause image errors are presented in
Figure 1. These thermal behaviours include the rotation (
,
, and
) and deformation (
) of the camera case, deformation (
) of the mount, deformation (
) of the lens, rotation (
,
, and
) and translation (
,
, and
) of the CCD focal plane relative to the camera case as well as the deformation (
and
) of the CCD itself and the translation (
) of the whole camera system induced by thermal deformation of the fixation device.
Figure 2 exhibits the imaging light path of one point in space before and after the above mentioned thermal behaviours occur. Before the thermal behaviours occur, based on the center perspective projection model, the quantitative relationship between the coordinates (
,
, and
) of a space point
P in the world coordinate system (
OW-
XWYWZW) and its coordinates (
,
) in the pixel coordinate system (
os-
xsys) can be expressed as:
where
R and
T are the rotation matrix and translation vector between the world coordinate system (
OW-
XWYWZW) and the camera coordinate system (
OC-
XCYCZC), respectively.
Cx and
Cy are the coordinates of the principal point in the image pixel coordinate system (
os-
xsys),
dx and
dy denote the physical size of one pixel along the
xs and
ys directions, respectively,
v is the image distance, and
is the
Z-directional coordinate of the space point
P in the camera coordinate system (
OC-
XCYCZC).
The thermal behaviours (
,
,
,
,
,
, and
) of the camera case, mount, and lens cause the variation in the space position and orientation of the camera coordinate system (
OC-
XCYCZC), which changes into (
OC′-
XC′YC′ZC′), relative to the world coordinate system (
OW-
XWYWZW). The thermal behaviours (
,
,
,
,
,
,
,
,
, and
) of the CCD focal plane, mount, and lens lead to the variation in the position and orientation of the changed physics image coordinate system (
Os′-
Xs′Ys′Zs′), which changes into (
Os″-
Xs″Ys″Zs″) relative to the changed camera coordinate system (
OC′-
XC′YC′ZC′). Based on the quantitative geometric analysis of the spatial position and orientation variation of these coordinate systems induced by the previously mentioned thermal behaviours, the coordinates (
,
,
) and (
,
,
) of the changed equivalent optical center
O′ and space point
P are acquired in the changed physics image coordinate system (
Os″-
Xs″Ys″Zs″). Furthermore, point
p″ at which line
intersects plane
Xs″Os″Ys″ is the image point corresponding to the space point
P after the thermal behaviours occur. Equation (2) expresses the relationship between the world coordinates (
,
,
) of the space point
P and the pixel coordinates (
,
) of the corresponding image point.
where
and
R″ and
T″ are the rotation matrix and translation vector from the coordinate system
Os′-
Xs′Ys′Zs′ to
Os″-
Xs″Ys″Zs″, respectively, expressed as:
and
R′ and
T′ are the rotation matrix and translation vector from the coordinate system
OC-
XCYCZC to
OC′-
XC′YC′ZC′, respectively, and expressed as:
and
v′ is expressed as:
dx′ and
dy′ are the physical sizes of one pixel after the thermal behaviours occurred and are expressed as:
where
lx and
ly are the initial physical lengths of the CCD focal plane along two directions.
Combined with Equations (1) and (2), the image error model based on the thermal behaviours was established. Next, the image error generated by each thermal behaviour was simulated, and the forms of image errors are shown in
Figure 3.
Table 1 lists the corresponding error form for each thermal behaviour.
Figure 4 shows the pixel drift caused by temperature variation in the investigated camera system under real experimental conditions. It can be seen that the actual image error is a combination of the previously mentioned error forms, while the influence degree of each error form is different. The previously mentioned thermal behaviours were studied experimentally and the image errors caused by them were analysed. This was done to eliminate the thermal behaviours that have little influence on image error and simplify the image error model discussed above.
2.2. Development and Verification of the Image Error Model for a Specific Camera System
In this subsection, we discuss the thermal responses of the selected camera system, which consists of an IPX-16M3-L CCD camera and Sigma macro 105-mm F2.8DG lens, to temperature variations. We assess the influence of these thermal responses on image acquisition and develop the specific thermal-induced image error model using the investigated camera system.
Figure 5a shows the experimental arrangement for measuring the responses of the rotations (
,
, and
) and translation (
) of the camera case to temperature variations under two types of fixed modes, i.e., a simple fixed mode with a single contact point and an improved fixed mode with multiple contact planes. The thermal rotations and translation were measured using a high-precision laser displacement sensor (LDS, LK-H050, precision of ±1 μm) during self-heating of the camera. Meanwhile, the temperature of the camera case was measured using a thermal sensor. The thermal rotations (
,
, and
) and translation (
) are plotted as a function of the temperature of the camera case in
Figure 5b. Compared to the simple fixed mode, the improved fixed mode can effectively eliminate all the thermal rotations and translation of the camera case, and further the adverse influence on image acquisition.
Neither of the two types of fixed modes can eliminate the thermal deformations (
,
, and
) of the camera case, mount, and lens along the optical axis. In our previous investigation [
14], the thermal responses (
,
, and
) of these components of the investigated camera system to temperature variations were measured, as shown in
Figure 6.
Under the improved fixed mode, the responses of rotations and translations of the CCD focal plane to the temperature of the camera case were measured during self-heating of the camera, respectively, as shown in
Figure 7a,b. The laser displacement sensor was used to measure the displacement of the CCD focal plane at different points shown in
Figure 7a to calculate the out-plane rotations (
and
) and out-plane translation (
). To calculate the in-plane rotation (
) and in-plane translations (
and
), the CCD focal plane was imaged using a reached thermal-balance camera, and its position was recognised via a matching algorithm, as shown in
Figure 7b. The thermal responses of the CCD focal plane were plotted as a function of the temperature of the camera case, as shown in
Figure 7c. The thermal translations (
,
, and
) of the CCD focal plane vary linearly with the temperature of the camera case and introduce considerable image errors. The thermal rotations (
and
) present randomness with variations in the case temperature, and the mean values of these rotations were extremely small and hardly caused image errors. The rotation (
) presents a significant positive correlation with the case temperature, but the maximum error in the pixel drift caused by the maximum rotation during variations in the case temperature has a magnitude of ~0.001 pixel under normal experimental conditions. This is reasonably negligible compared to the measurement resolution of 1/100 of a pixel in photo mechanics measurements.
The CCD focal plane is generally fabricated using silica-based materials that have a very small thermal expansion coefficient. The thermal expansion coefficient has a magnitude of approximately 10−7 °C−1. Considering that the temperature variation range of the focal plane is of the order of 10 °C, the relative distortion in the captured image induced by the deformations of the CCD focal plane is of the order of 10−6, which will lead to a maximum pixel drift of 0.001 pixels. Take a 1000 by 1000 resolution as an example. Therefore, the influence of the thermal deformations ( and ) of the CCD focal plane on image acquisition can be neglected.
Combined with the above experimental results as well as theoretical analysis, the thermal behaviours that generate considerable image errors are given in
Table 2. One part of the behaviours (
,
,
, and
) introduced image distortion errors, and another part (
and
) introduced image translation errors. Introducing both parts of the thermal behaviours into Equation (2) and combining this with Equation (1), we established the image distortion error model, expressed as:
and image translation error model, expressed as:
In this case,
,
, and
are the thermal deformation parameters of the camera case, mount, and lens, respectively.
,
, and
are the thermal translation parameters of the CCD focal plane along
X,
Y, and
Z directions, respectively. Δ
Tc, Δ
Tm, and Δ
Tl represent the temperature variations in the camera case, mount, and lens, respectively. These can be calculated as:
This was determined in our previous investigation [
14]. Equation (13) expresses the relationship between the environmental temperature, temperature of the camera components, and thermal parameters (
R1~
R6 and
K1~
K4). The camera system investigated in this study is the same as that used in an earlier study [
14]. Therefore, the previously mentioned thermal parameters should also be the same, which are listed in
Table 3.
Next, we carried out an experiment to verify the correctness of these models developed using the investigated camera system. As shown in
Figure 8a, the camera system and a planar test pattern of a checkerboard were fixed tightly on the optical platform, and the surrounding temperature of the camera was kept constant during the experiment. Once the camera was switched on, the image of the checkerboard was captured with a frame rate of 1/60 frames per second (fps). Then, the coordinates of the corners in these images were obtained using the Harris algorithm, which can be used to calculate the pixel drift of subsequent images relative to the first captured image as well as further image distortion and translation errors. Using the specific thermal-induced image error models, the theoretical results for the thermal-induced pixel drift, image distortion error, and image translation error were calculated. The results of the experiment are presented in
Figure 8b. These results indicate that the image error models established in this study can effectively describe the thermal-induced pixel drift, image distortion error, and image translation error.
For the investigated camera system, we performed a series of experiments to investigate the responses of the thermal behaviours of the camera system to temperature and further obtained specific image error models, which were experimentally verified. In the following subsection, the relationship between the image error and measurement error in photo mechanics measurements is discussed in detail in order to establish the relationship between the temperature and measurement error.
2.3. Relationship between Image Error and Measurement Error
The influences of the investigated image errors on the measurement errors in image analysis and fringe analysis of photo mechanics methods need to be considered, separately. For image analysis, the thermal-induced strain measurement error
εe is consistent with the image distortion error
αe, and the thermal-induced translation measurement errors
and
are consistent with the image translation errors Δ
xe and Δ
ye, respectively. The relationships are expressed as:
In this case, taking the DIC method as an example, the measurement errors in this method induced by the distortion error and translation error of speckle images were investigated. As shown in
Figure 9, a speckle image was subjected to longitudinal stretching of 1 × 10
3 με and translation of the 1 × 10
−1 pixel to obtain a distorted image and translated image. Furthermore, DIC was used to obtain the strain result (1.009 × 10
3 με) of the distorted image relative to the initial image and translation result (0.891 × 10
−1 pixel) of the translated image relative to the initial image. The results obtained using DIC are consistent with the theoretical values considering the numerical error induced by this method, which indicates that the image error is the same as the measurement error observed in the image analysis methods.
In fringe analysis, the phase is a significant parameter for obtaining mechanical information, such as displacement and strain. The image distortion error (
αe) and image translation error (Δ
xe and Δ
ye) cause phase errors (Δ
and Δ
), which are expressed as:
In this case,
φx and
φy are the initial phase information.
nx and
ny are constants related to the period of the fringe. Furthermore, the phase errors introduce measurement errors in fringe analysis methods. In this study, the measurement errors induced by the distortion error and translation error of the fringe image were investigated. A fringe image was subjected to a longitudinal stretching of 1 × 10
3 με and translation of 1 × 10
−1 pixel, respectively, to obtain a distorted image and translated image, as shown in
Figure 10. Then, the phase of these fringe images was analysed to calculate the strain result (1.001 × 10
3 με) of the distorted image relative to the initial image and the translation result (0.990 × 10
−1 pixel) of the translated image relative to the initial image. The measured results are consistent with the theoretical values considering the numerical error induced by this method.
The above experimental results indicate that the image errors induced by variations in the camera temperature will introduce measurement errors in both image analysis and fringe analysis. Thus, combined with the above discussed thermal-induced image error models, we established the relationship between temperature and measurement errors in photo mechanics methods, which served as the theoretical basis for the temperature compensation methods described in the following section.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}