
Moral Decision Making: From Bentham to Veil of Ignorance via Perspective Taking Accessibility


{kind=link}
{kind=link}
Abstract
1. Moral Philosophy
1.1. Bentham’s Utilitarianism
1.2. Kantian Deontology
2. Normative Decision-Making
2.1. Rationalist and Intuitionist Approaches to Moral Decision-Making
2.2. The Dual Process Theory of Moral Decision-Making
A runaway trolley is headed for five people who will be killed if it proceeds on its present course. The only way to save them is to hit a switch that will turn the trolley onto an alternate set of tracks where it will kill one person instead of five. Ought you to turn the trolley in order to save five people at the expense of one?(p. 2105)
You are standing next to a large stranger on a footbridge that spans the tracks, in between the oncoming trolley and the five people. In this scenario, the only way to save the five people is to push this stranger off the bridge, onto the tracks below. He will die if you do this, but his body will stop the trolley from reaching the others. Ought you to save the five others by pushing this stranger to his death?(p. 2105)
2.3. Contextual Accessibility in Moral Decision-Making Tasks
3. Moral Perspective-Taking Accessibility
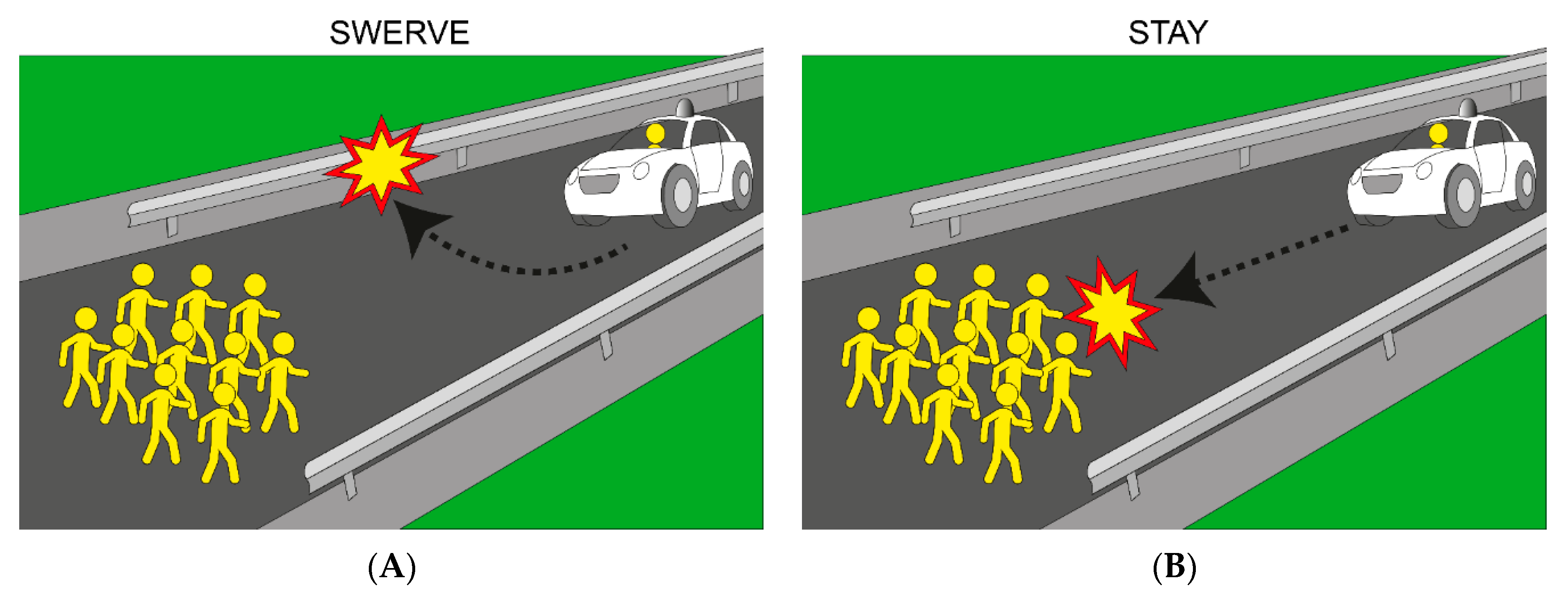
3.1. Autonomous Vehicles: A Very Real Moral Problem
3.2. Veil of Ignorance: The Moral Perspective-Taking Accessibility Approach
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bentham, J. An Introduction to the Principles of Moral and Legislation; Hafner Publishing: Darian, CT, USA, 1970. (Original work published 1789). [Google Scholar]
- Annas, J. Epicurus on pleasure and happiness. Philos. Top. 1987, 15, 5–21. [Google Scholar] [CrossRef]
- Hutcheson, F. An Essay on the Nature and Conduct of the Passions and Affections: With Illustrations on the Moral Sense, 3rd ed.; Ward: London, UK, 1742. (Original work published 1728). [Google Scholar]
- Brink, D.O. Some forms and limits of consequentialism. In The Oxford Handbook of Ethical Theory; Copp, D., Ed.; Oxford University Press: New York, NY, USA, 2006; pp. 380–423. [Google Scholar]
- Broad, C.D. Self and others. In Broads Critical Essays in Moral Philosophy; Cheney, D.R., Ed.; Allen and Unwin: London, UK, 1971; pp. 262–282. [Google Scholar]
- Bentham, J. Bentham: A Fragment on Government; Harrison, R., Ed.; Cambridge University Press: Cambridge, UK, 1988. (Original work published 1776). [Google Scholar]
- Huebner, B.; Hauser, M.D. Moral judgments about altruistic self-sacrifice: When philosophical and folk intuitions clash. Philos. Psychol. 2011, 24, 73–94. [Google Scholar] [CrossRef]
- Mill, J.S. Utilitarianism; Cambridge University Press: Cambridge, UK, 2014. (Original work published 1863). [Google Scholar]
- West, H.R. An Introduction to Mills Utilitarian Ethics; Cambridge University Press: New York, NY, USA, 2004. [Google Scholar]
- Kant, I. Groundwork for the Metaphysics of Morals; Yale University Press: New Haven, CT, USA; London, UK; New York, NY, USA, 2002. (Original work published 1785). [Google Scholar]
- Foot, P. The problem of abortion and the doctrine of the double effect. Oxf. Rev. 1967, 5, 5–15. [Google Scholar]
- Greene, J.D.; Sommerville, R.B.; Nystrom, L.E.; Darley, J.M.; Cohen, J.D. An fMRI investigation of emotional engagement in moral judgment. Science 2001, 293, 2105–2108. [Google Scholar] [CrossRef]
- Von Neumann, J.; Morgenstern, O. Theory of Games and Economic Behaviour; Princeton University Press: Princeton, NJ, USA, 1947. [Google Scholar]
- Savage, L. The Foundations of Statistics; Wiley: New York, NY, USA, 1954. [Google Scholar]
- Scott, J. Rational choice theory. In Understanding Contemporary Society: Theories of the Present; Browning, G., Halcli, A., Hewlett, N., Webster, F., Eds.; Sage: London, UK, 2000; pp. 126–138. [Google Scholar]
- Sugden, R. Rational choice: A survey of contributions from economics and philosophy. Econ. J. 1991, 101, 751–785. [Google Scholar] [CrossRef]
- Hertwig, R.; Barron, G.; Weber, E.U.; Erev, I. Decisions from experience and the effect of rare events in risky choice. Psychol. Sci. 2004, 15, 534–539. [Google Scholar] [CrossRef]
- Kahneman, D.; Tversky, A. Prospect theory: An analysis of decision under risk. Econometrica 1979, 47, 263–291. [Google Scholar] [CrossRef]
- Kusev, P.; van Schaik, P.; Tsaneva-Atanasova, K.; Juliusson, A.; Chater, N. Adaptive anchoring model: How static and dynamic presentations of time series influence judgments and predictions. Cogn. Sci. 2018, 42, 77–102. [Google Scholar] [CrossRef]
- Kusev, P.; van Schaik, P.; Martin, R.; Hall, L.; Johansson, P. Preference reversals during risk elicitation. J. Exp. Psychol. Gen. 2020, 149, 585–589. [Google Scholar] [CrossRef]
- Marteau, T.M. Framing of information: Its influence upon decisions of doctors and patients. Br.J. Soc. Psychol. 1989, 28, 89–94. [Google Scholar] [CrossRef]
- McNeil, B.J.; Pauker, S.G.; Sox, H.C., Jr.; Tversky, A. On the elicitation of preferences for alternative therapies. N. Engl. J. Med. 1982, 306, 1259–1262. [Google Scholar] [CrossRef] [PubMed]
- Tversky, A.; Kahneman, D. Advances in prospect theory: Cumulative representations of uncertainty. J. Risk. Uncertain. 1992, 5, 297–323. [Google Scholar] [CrossRef]
- Piaget, J. The Moral Judgment of the Child; The Free Press: New York, NY, USA, 1965. [Google Scholar]
- Rest, J.R. Moral Development: Advances in Research and Theory; Praeger: New York, NY, USA, 1986. [Google Scholar]
- Rest, J.; Narvaez, D.; Bebeau, M.J.; Thoma, S.J. Postconventional Moral Thinking: A Neo-Kohlbergian Approach; Lawrence Erlbaum Associates: Mahwah, NJ, USA, 1999. [Google Scholar]
- Turiel, E. The Development of Social Knowledge: Morality and Convention; Cambridge University Press: New York, NY, USA, 1983. [Google Scholar]
- Kohlberg, L. Stages and aging in moral development—Some speculations. Gerontologist 1973, 13, 497–502. [Google Scholar] [CrossRef] [PubMed]
- Kohlberg, L. Stage and sequence: The cognitive-developmental approach to socialization. In Handbook of Socialization Theory and Research; Goslin, D.A., Ed.; Rand McNally: Chicago, IL, USA, 1969; pp. 348–380. [Google Scholar]
- Kohlberg, L. Essays in Moral Development: The Psychology of Moral Development; Harper & Row: San Francisco, CA, USA, 1981; Volume 2. [Google Scholar]
- Colby, A.; Kohlberg, L.; Speicher, B.; Hewer, A.; Candee, D.; Gibbs, J.; Power, C. The Measurement of Moral Judgement: Volume 2, Standard Issue Scoring Manual; Cambridge University Press: New York, NY, USA, 1987; Volume 2. [Google Scholar]
- Selman, R.L. The relation of role taking to the development of moral judgment in children. Child. Dev. 1971, 42, 79–91. [Google Scholar] [CrossRef]
- Haidt, J. The emotional dog and its rational tail: A social intuitionist approach to moral judgement. Psychol. Rev. 2001, 108, 814–834. [Google Scholar] [CrossRef] [PubMed]
- Hume, D. A Treatise of Human Nature; Penguin: London, UK, 1969. (Original work published 1739–1740). [Google Scholar]
- Sunstein, C.R. Moral heuristics. Behav. Brain. Sci. 2005, 28, 531–573. [Google Scholar] [CrossRef]
- Lieberman, D.; Tooby, J.; Cosmides, L. Does morality have a biological basis? An empirical test of the factors governing moral sentiments relating to incest. Proc. R. Soc. Lond. (Biol.) 2003, 270, 819–826. [Google Scholar] [CrossRef]
- Mikhail, J. Universal moral grammar: Theory, evidence and the future. Trends. Cogn. Sci. 2007, 11, 143–152. [Google Scholar] [CrossRef]
- Skinner, B.F. Beyond Freedom and Dignity; Pelican Books: New York, NY, USA, 1971. [Google Scholar]
- Crockett, M. Models of morality. Trends. Cogn. Sci. 2013, 17, 363–366. [Google Scholar] [CrossRef]
- Kusev, P.; van Schaik, P.; Love, B. Learning to Choose: Associative Learning and Preference Formation in Risky Choice. In Abstracts of the Psychonomic Society, Proceeding of the 58th Annual Meeting of the Psychonomic Society, Vancouver, Canada, 9–12 November 2017; Vancouver Convention Centre: Vancouver, BC, Canada, 2017. [Google Scholar]
- Hill, T.; Kusev, P.; Van Schaik, P. Choice under risk: How occupation influences preferences. Front. Psychol. 2019, 10, 2003. [Google Scholar] [CrossRef] [PubMed]
- Heilman, R.M.; Kusev, P. The gender pay gap: Can behavioral economics provide useful insights? Front. Psychol. 2017, 8, 95. [Google Scholar] [CrossRef]
- Greene, J.D.; Haidt, J. How (and where) does moral judgment work? Trends. Cogn. Sci. 2002, 6, 517–523. [Google Scholar] [CrossRef]
- Greene, J.D. Beyond point-and-shoot morality: Why cognitive (neuro)science matters for ethics. Ethics 2015, 124, 695–726. [Google Scholar] [CrossRef]
- Thomson, J.J. The trolley problem. Yale. Law. J. 1985, 94, 1395–1415. [Google Scholar] [CrossRef]
- Stanovich, K.E.; West, R.F. Individual differences in reasoning: Implications for the rationality debate? Behav. Brain. Sci. 2000, 23, 645–726. [Google Scholar] [CrossRef] [PubMed]
- Kusev, P.; van Schaik, P.; Alzahrani, S.; Lonigro, S.; Purser, H. Judging the morality of utilitarian actions: How poor utilitarian accessibility makes judges irrational. Psychon. Bull. Rev. 2016, 23, 1961–1967. [Google Scholar] [CrossRef]
- Martin, R.; Kusev, I.; Cooke, A.; Baranova, V.; van Schaik, P.; Kusev, P. Commentary: The social dilemma of autonomous vehicles. Front. Psychol. 2017, 8, 1–2. [Google Scholar] [CrossRef]
- Martin, R.; Kusev, P.; van Schaik, P. Autonomous vehicles: How perspective taking accessibility alters moral judgments and consumer purchasing behavior. Cognition 2021, 212. [Google Scholar] [CrossRef]
- Dijksterhuis, A.; Nordgren, L.F. A theory of unconscious thought. Perspect. Psycho. Sci. 2006, 1, 95–109. [Google Scholar] [CrossRef]
- Kusev, P.; van Schaik, P.; Ayton, P.; Dent, J.; Chater, N. Exaggerated risk: Prospect theory and probability weighting in risky choice. J. Exp. Psychol. Learn. Mem. Cogn. 2009, 35, 1487–1505. [Google Scholar] [CrossRef]
- Tversky, A.; Kahneman, D. The framing of decisions and the psychology of choice. Science 1981, 211, 453–458. [Google Scholar] [CrossRef]
- Tversky, A.; Kahneman, D. Loss aversion in riskless choice: A preference-dependent model. Q. J. Econ. 1991, 106, 1039–1061. [Google Scholar] [CrossRef]
- Bauman, C.W.; McGraw, A.P.; Bartels, D.M.; Warren, C. Revisiting external validity: Concerns about trolley problems and other sacrificial dilemmas in moral psychology. Soc. Pers. Psychol. Compass. 2014, 8, 536–554. [Google Scholar] [CrossRef]
- Morris, D.Z. Mercedes-Benz’s Self-Driving Cars Would Choose Passenger Lives over Bystanders. Available online: https://fortune.com/2016/10/15/mercedes-self-driving-car-ethics/ (accessed on 15 October 2016).
- Shariff, A.; Bonnefon, J.-F.; Rahwan, I. Psychological roadblocks to the adoption of self-driving vehicles. Nat. Hum. Behav. 2017, 1, 694–696. [Google Scholar] [CrossRef] [PubMed]
- Litman, T. Autonomous Vehicle Implementation Predictions: Implications for Transport Planning; Victoria Transport Policy Institute: Victoria, BC, Canada, 2018; pp. 1–35. [Google Scholar]
- Kröger, F. Automated driving in its social, historical and cultural contexts. In Autonomous driving: Technical, Legal and Social Aspects; Maurer, M.J., Gerbes, C., Lenz, B., Winner, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; pp. 41–67. [Google Scholar]
- Awad, E.; Desouza, S.; Kim, R.; Schulz, J.; Heinrich, J.; Shariff, A.; Bonnefon, J.-F.; Rahwan, I. The moral machine experiment. Nature 2018, 563, 59–64. [Google Scholar] [CrossRef] [PubMed]
- Bonnefon, J.-F.; Shariff, A.; Rahwan, I. The social dilemma of autonomous vehicles. Science 2016, 325, 1573–1576. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Barriers and policy recommendations. Transp. Res. A 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Faulhaber, A.K.; Dittmer, A.; Blind, F.; Wächter, M.A.; Timm, S.; Sütfeld, L.R.; Stephan, A.; Pipa, G.; König, P. Human decisions in moral dilemmas are largely described by utilitarianism: Virtual car driving study provides guidelines for autonomous driving vehicles. Sci. Eng. Ethics. 2019, 25, 399–418. [Google Scholar] [CrossRef]
- Maurer, M.J.; Gerdes, C.; Lenz, B.; Winner, H. Autonomous driving: Technical, Legal and Social Aspects; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Nyholm, A.; Smids, J. The ethics of accident-algorithms for self-driving cars: An applied trolley problem? Ethical. Theory. Moral. Pract. 2016, 19, 1275–1289. [Google Scholar] [CrossRef]
- Fleetwood, J. Public health, ethics, and autonomous vehicles. Am. J. Public. Heath 2017, 107, 532–537. [Google Scholar] [CrossRef]
- Meyer, J.; Becker, H.; Bösch, P.M.; Axhausen, K.W. Autonomous vehicles: The next jump in accessibilities? Res. Transp. Econ. 2017, 62, 80–91. [Google Scholar] [CrossRef]
- Bose, A.; Ioannou, P. Analysis of traffic flow with mixed manual and semiautomated vehicles. IEEE. Trans. Intell. Transp. Syst. 2003, 4, 173–188. [Google Scholar] [CrossRef]
- Wadud, Z.; MacKenzie, D.; Leiby, P. Help or hindreance? The travel, energy and carbon impacts of highly automated vehicles. Transp. Res. A 2016, 86, 1–18. [Google Scholar]
- Goodall, N.J. Ethical decision making during automated vehicle crashes. Transp. Res. Rec. 2014, 2424, 58–65. [Google Scholar] [CrossRef]
- Contissa, G.; Lagioia, F.; Sartor, G. The ethical knob: Ethically-customisable automated vehicles and the law. Artif. Intell. Law 2017, 25, 365–378. [Google Scholar] [CrossRef]
- Gogoll, J.; Müller, J.F. Autonomous cars: In favor of mandatory ethics. Sci. Eng. Ethics. 2017, 23, 681–700. [Google Scholar] [CrossRef] [PubMed]
- Batson, C.D.; Early, S.; Salvarani, G. Perspective taking: Imagining how others feel versus how you would feel. Pers. Soc. Psychol. Bull. 1997, 23, 751–758. [Google Scholar] [CrossRef]
- Ruby, P.; Decety, J. How would you feel versus how do you think she would feel? A neuroimaging study of perspective-taking with social emotions. J. Cogn. Neurosci. 2004, 16, 988–999. [Google Scholar] [CrossRef] [PubMed]
- Stotland, E. Exploratory investigations of empathy. In Advances in Experimental Social Psychology; Berkowitz, L., Ed.; Academic Press: New York, NY, USA, 1969; Volume 4, pp. 271–314. [Google Scholar]
- Rawls, J. A Theory of Justice; Harvard University Press: Cambridge, MA, USA, 2009. (Original work published 1971). [Google Scholar]
- Harsanyi, J.C. Cardinal welfare, individualistic ethics, and interpersonal comparisons of utility. J. Political. Econ. 1955, 63, 309–321. [Google Scholar] [CrossRef]
- Huang, K.; Greene, J.D.; Bazerman, M. Veil-of-ignorance reasoning favors the greater good. Proc. Natl. Acad. Sci. USA. 2019, 116, 23989–23995. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martin, R.; Kusev, P.; Teal, J.; Baranova, V.; Rigal, B. Moral Decision Making: From Bentham to Veil of Ignorance via Perspective Taking Accessibility. Behav. Sci. 2021, 11, 66. https://doi.org/10.3390/bs11050066
Martin R, Kusev P, Teal J, Baranova V, Rigal B. Moral Decision Making: From Bentham to Veil of Ignorance via Perspective Taking Accessibility. Behavioral Sciences. 2021; 11(5):66. https://doi.org/10.3390/bs11050066
Chicago/Turabian StyleMartin, Rose, Petko Kusev, Joseph Teal, Victoria Baranova, and Bruce Rigal. 2021. "Moral Decision Making: From Bentham to Veil of Ignorance via Perspective Taking Accessibility" Behavioral Sciences 11, no. 5: 66. https://doi.org/10.3390/bs11050066
APA StyleMartin, R., Kusev, P., Teal, J., Baranova, V., & Rigal, B. (2021). Moral Decision Making: From Bentham to Veil of Ignorance via Perspective Taking Accessibility. Behavioral Sciences, 11(5), 66. https://doi.org/10.3390/bs11050066