An Automatic Procedure for the Quantitative Characterization of Submarine Bedforms


Abstract
:1. Introduction
2. Methods
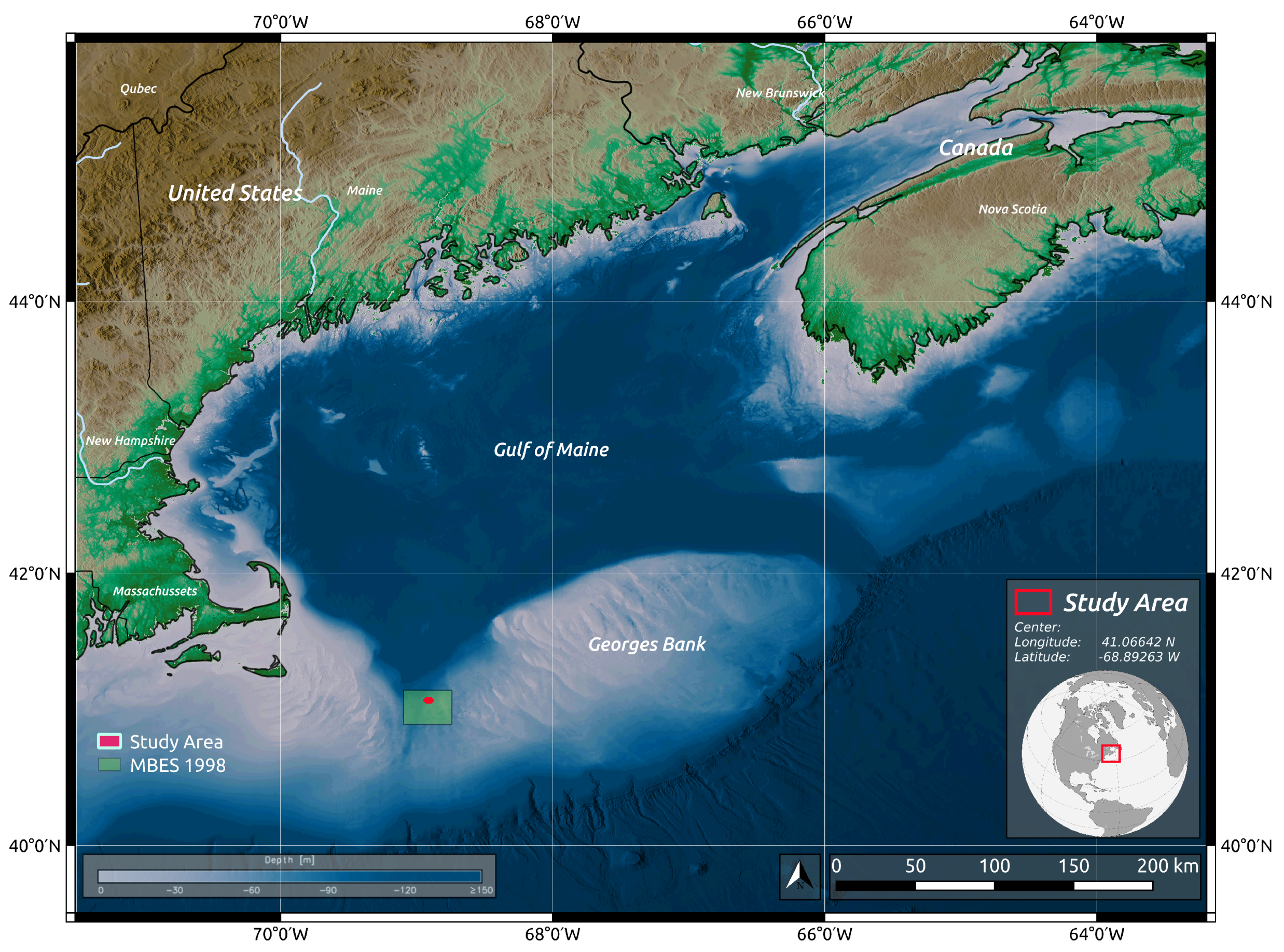
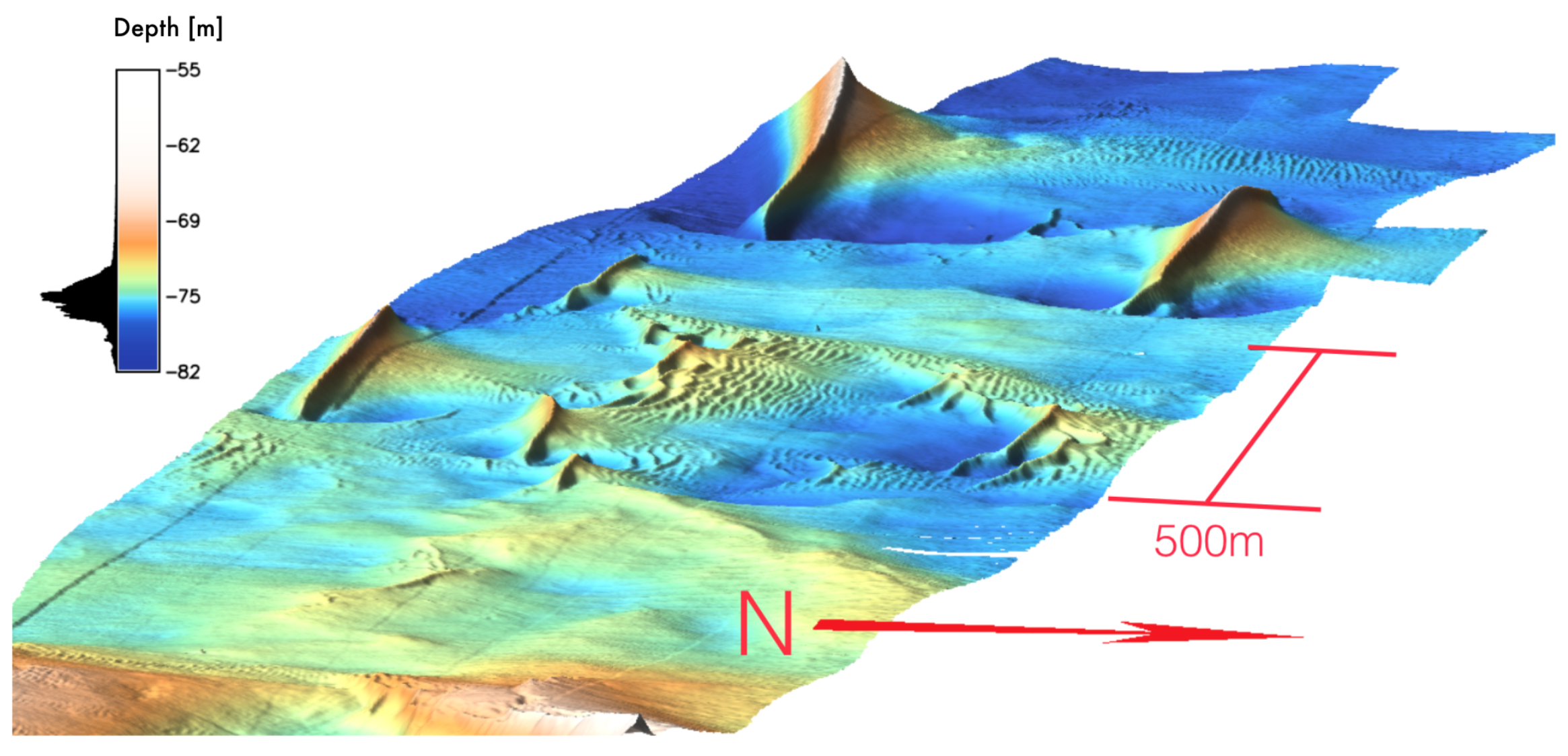
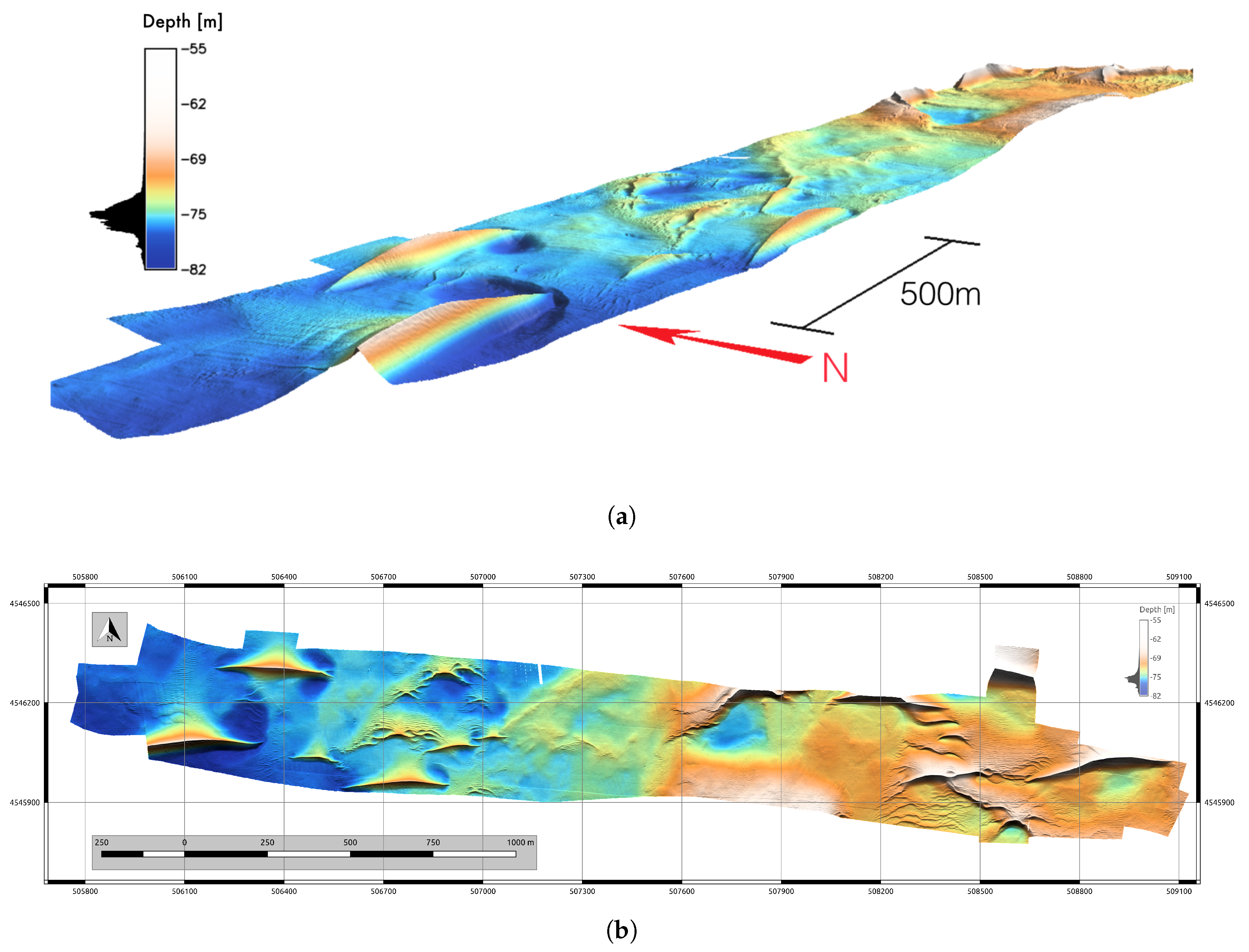
2.1. Area of Study
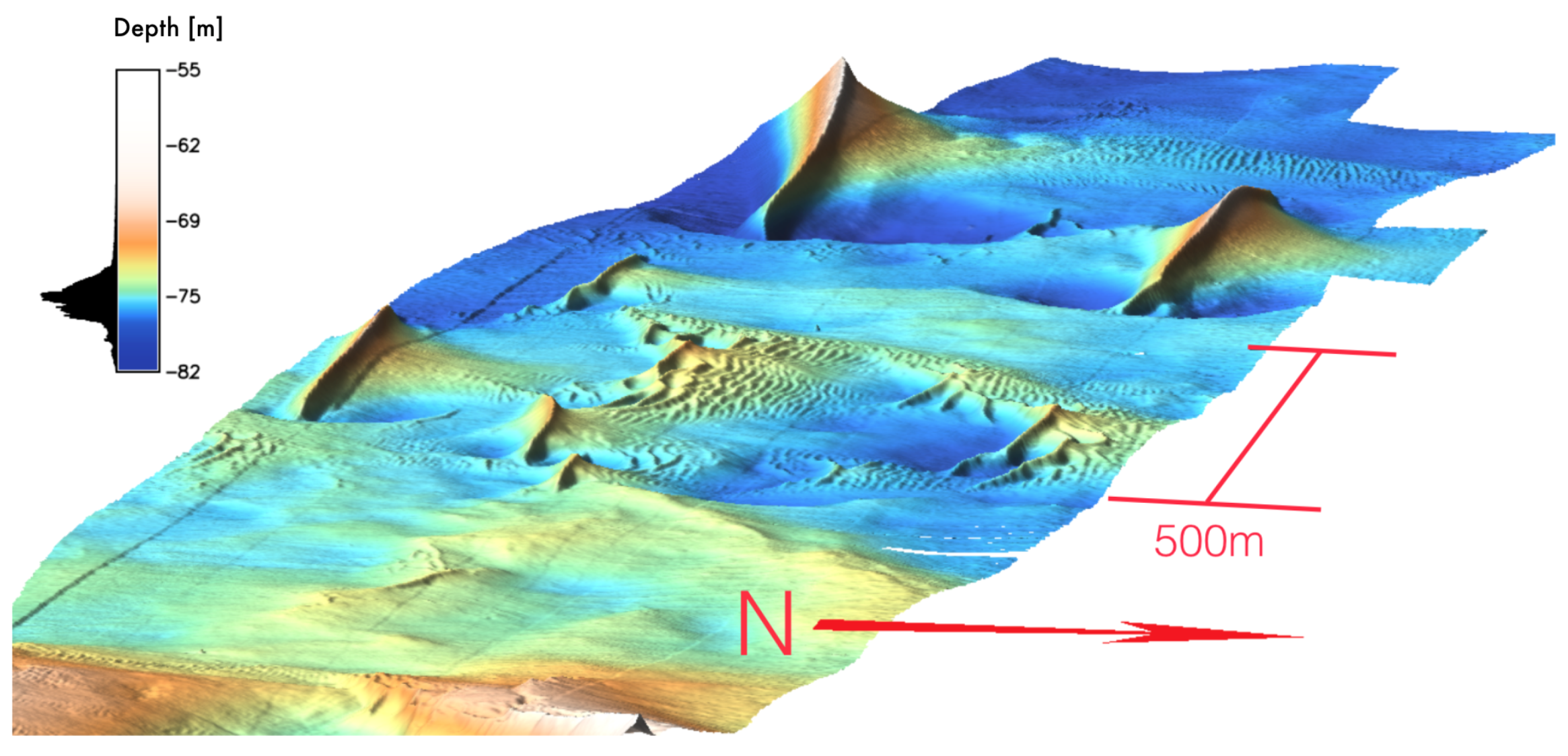
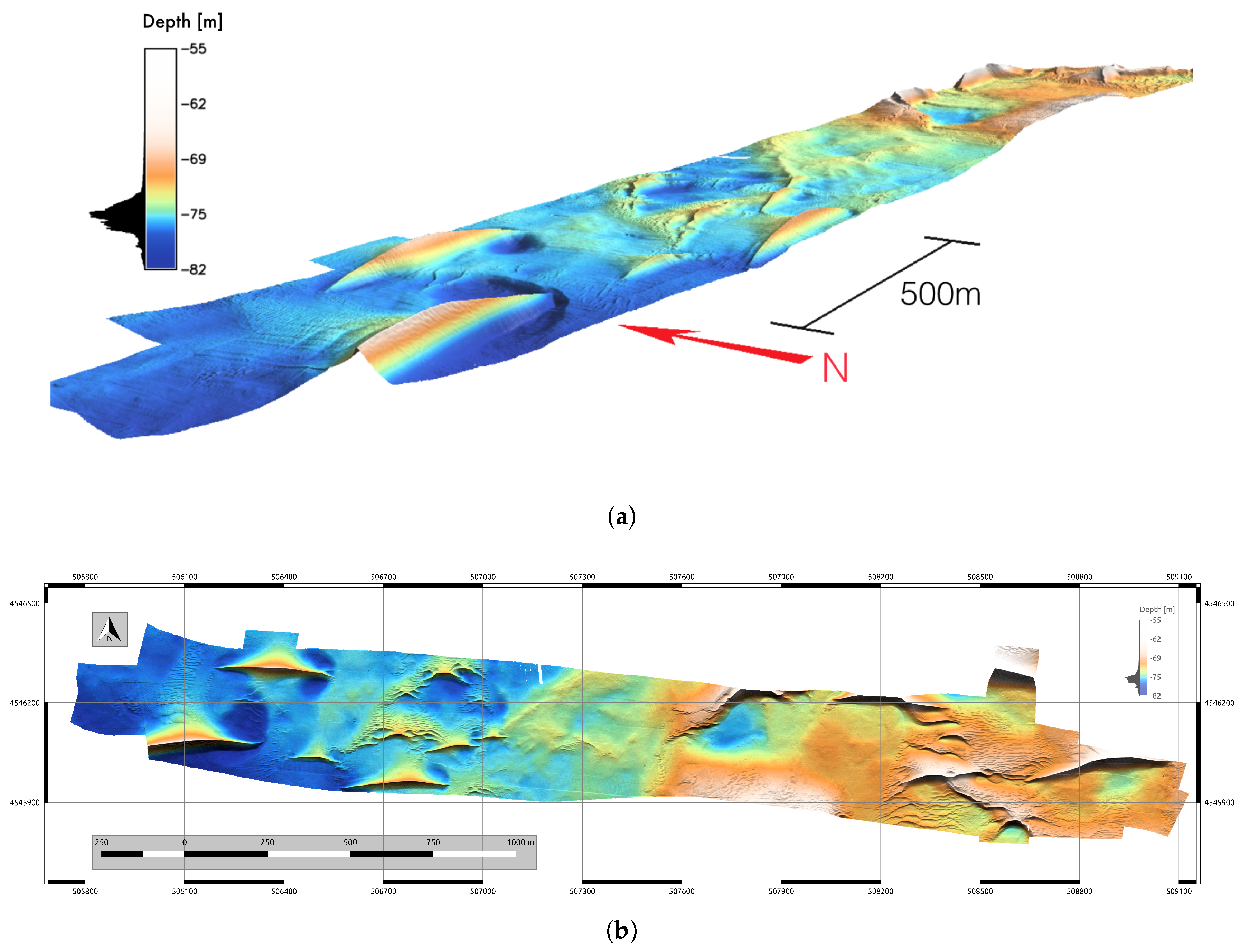
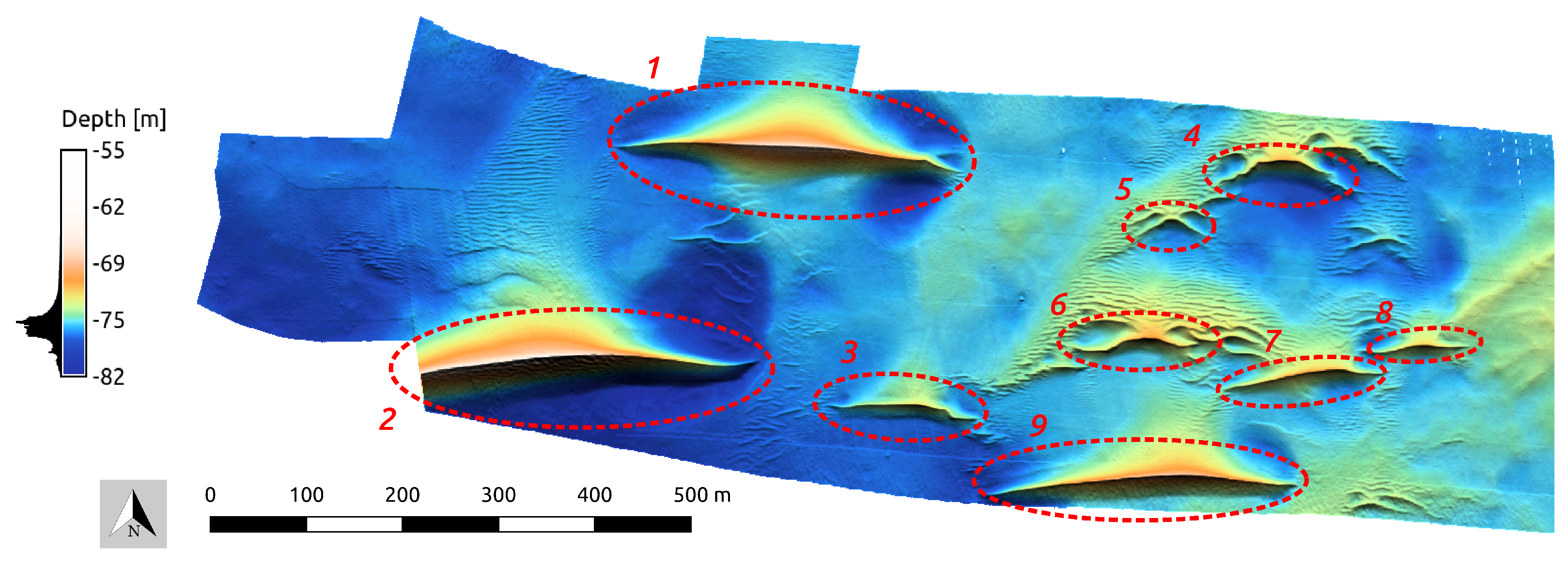
2.1.1. Survey Description
2.1.2. Survey Methods
2.2. Data Processing
- Accounting for the refraction effects due to changes in sound speed in the water column. For this purpose, CTD vertical profiles were acquired by the HabCam every two hours, for a total of three sound speed profiles.
- Accounting for vertical offsets due to tide effect by referencing the dataset to the WGS84 ellipsoid and by using GPS and IMU navigation to reprocess the data.
- Removal of outliers by data filtering and manual cleaning.
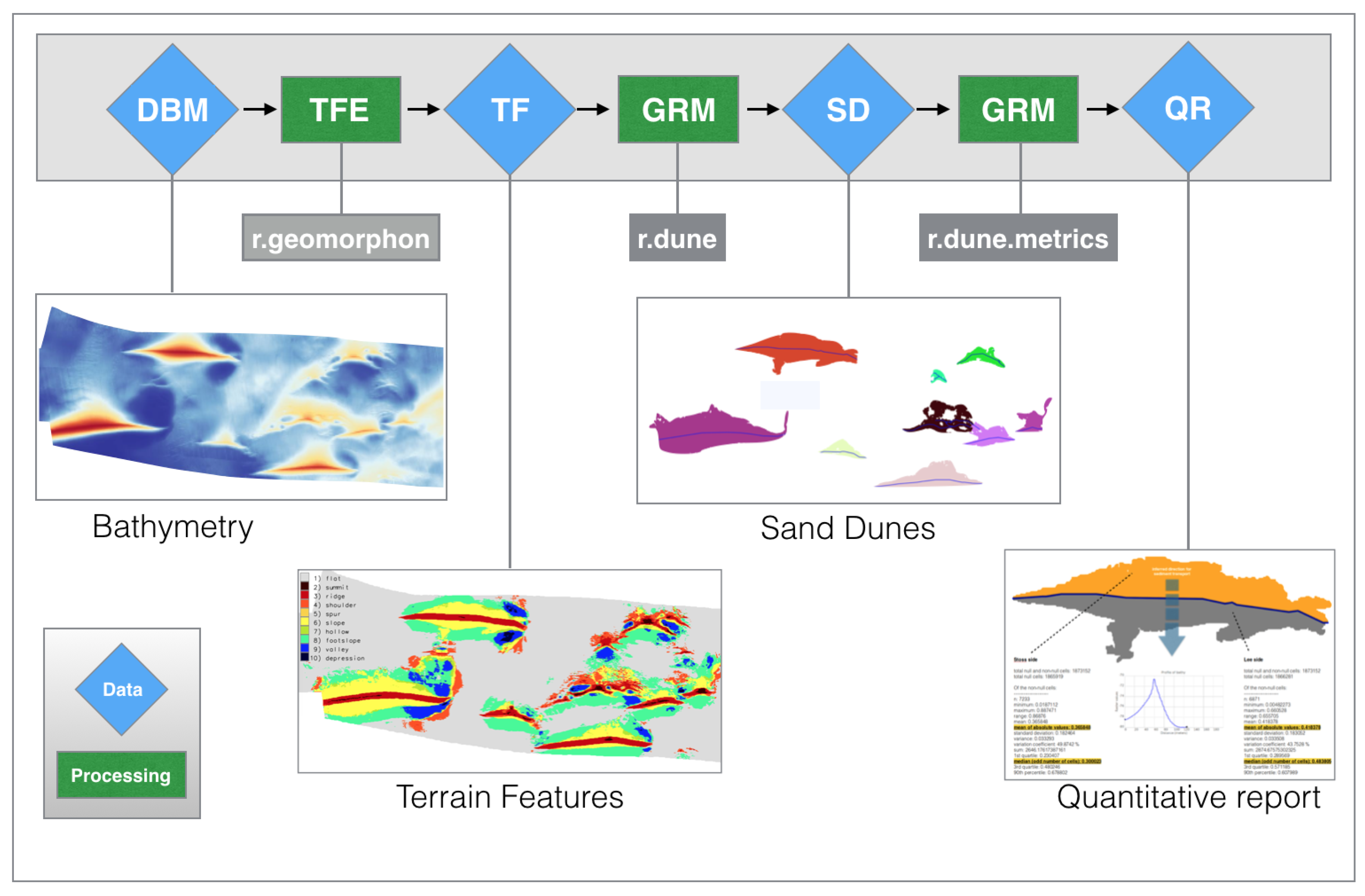
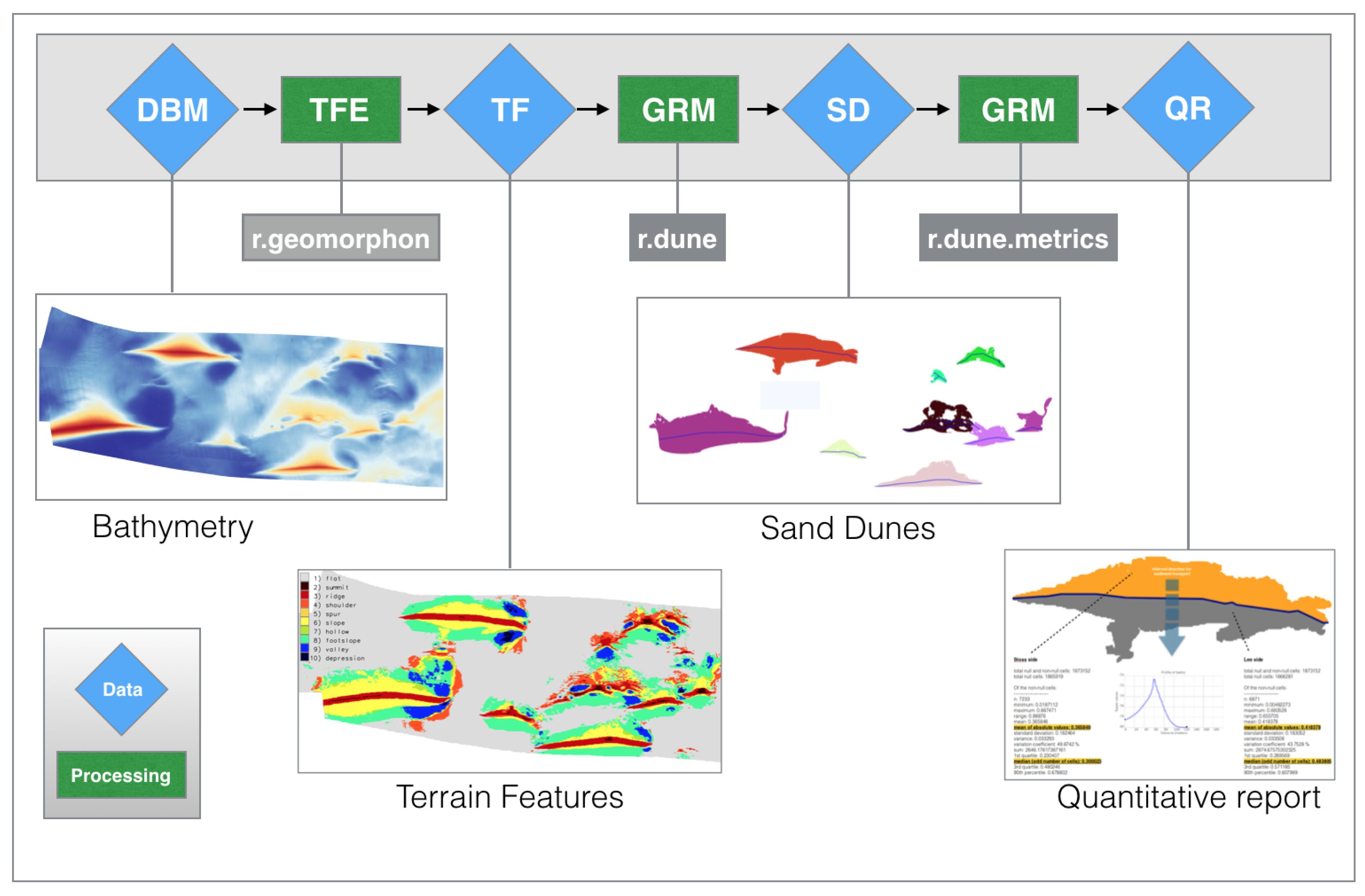
2.3. Model Descriptions
- Terrain Feature Extraction (TFE): Where a series of terrain parameters is computed from a digital terrain model
- Geospatial rule-based model (GRM): The identification and quantitative description of specific bedforms (e.g., sand dunes)
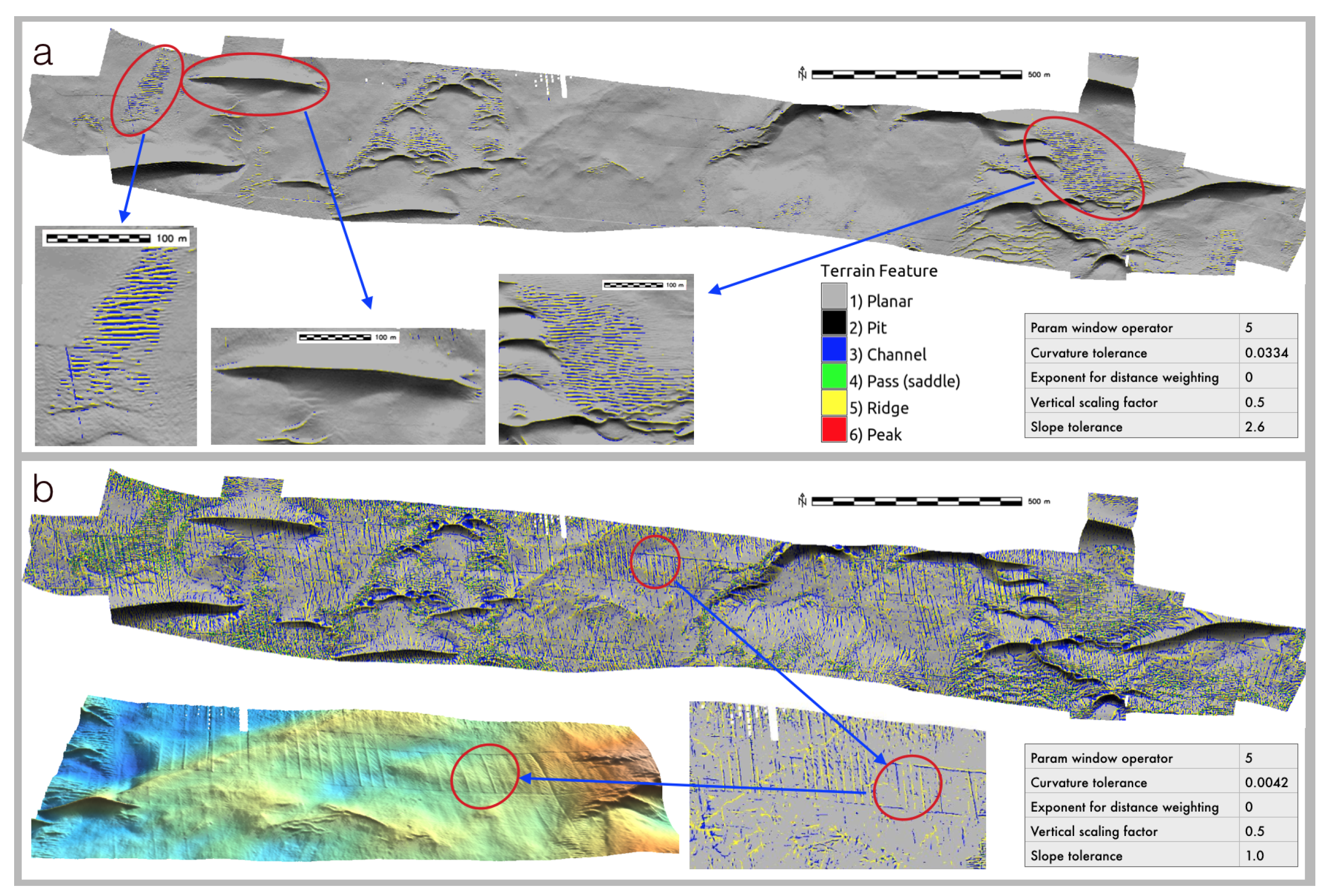
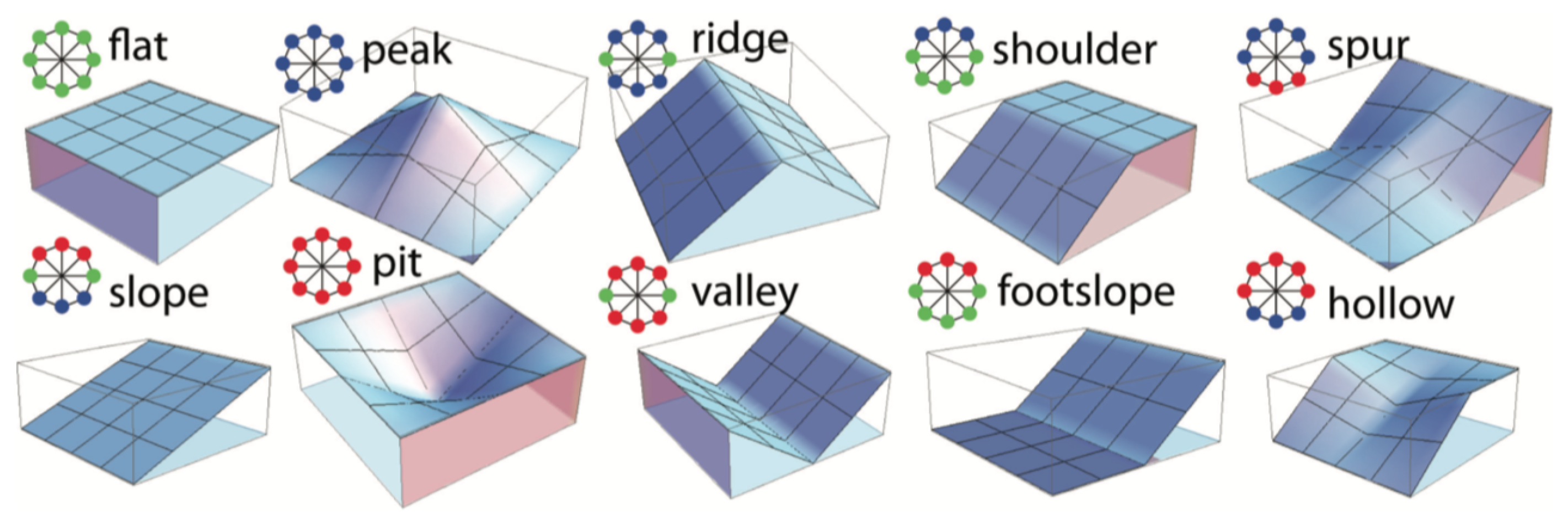
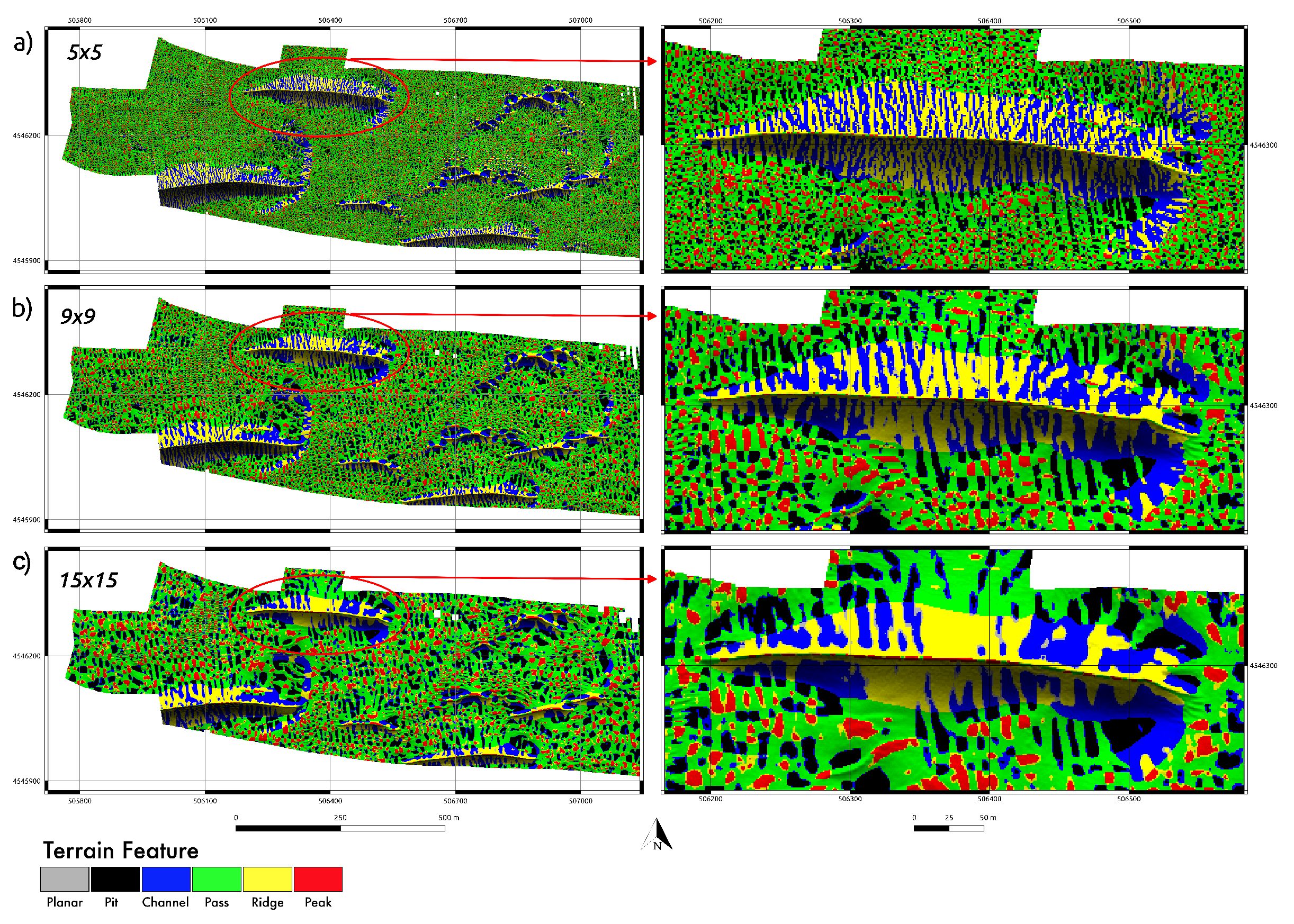
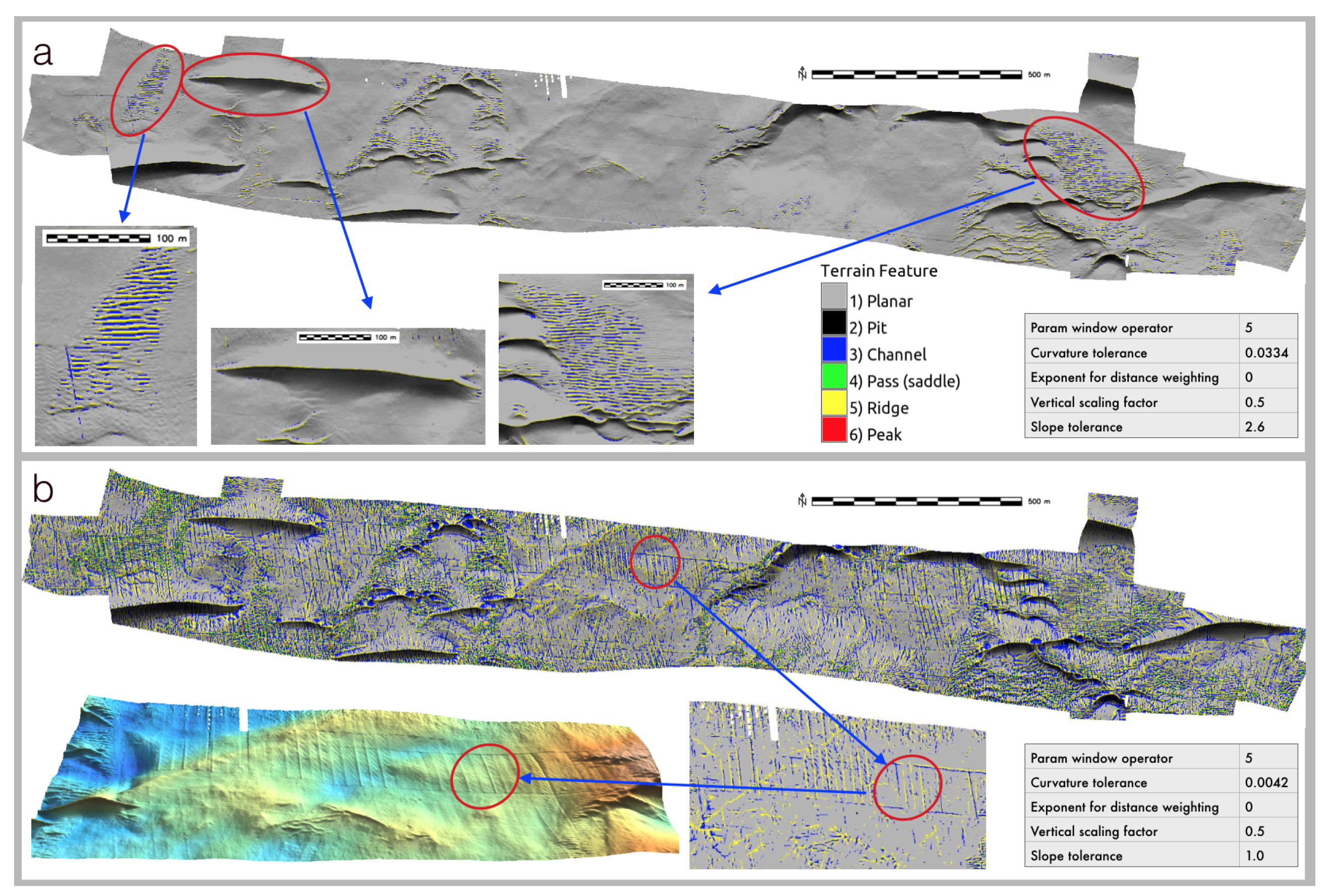
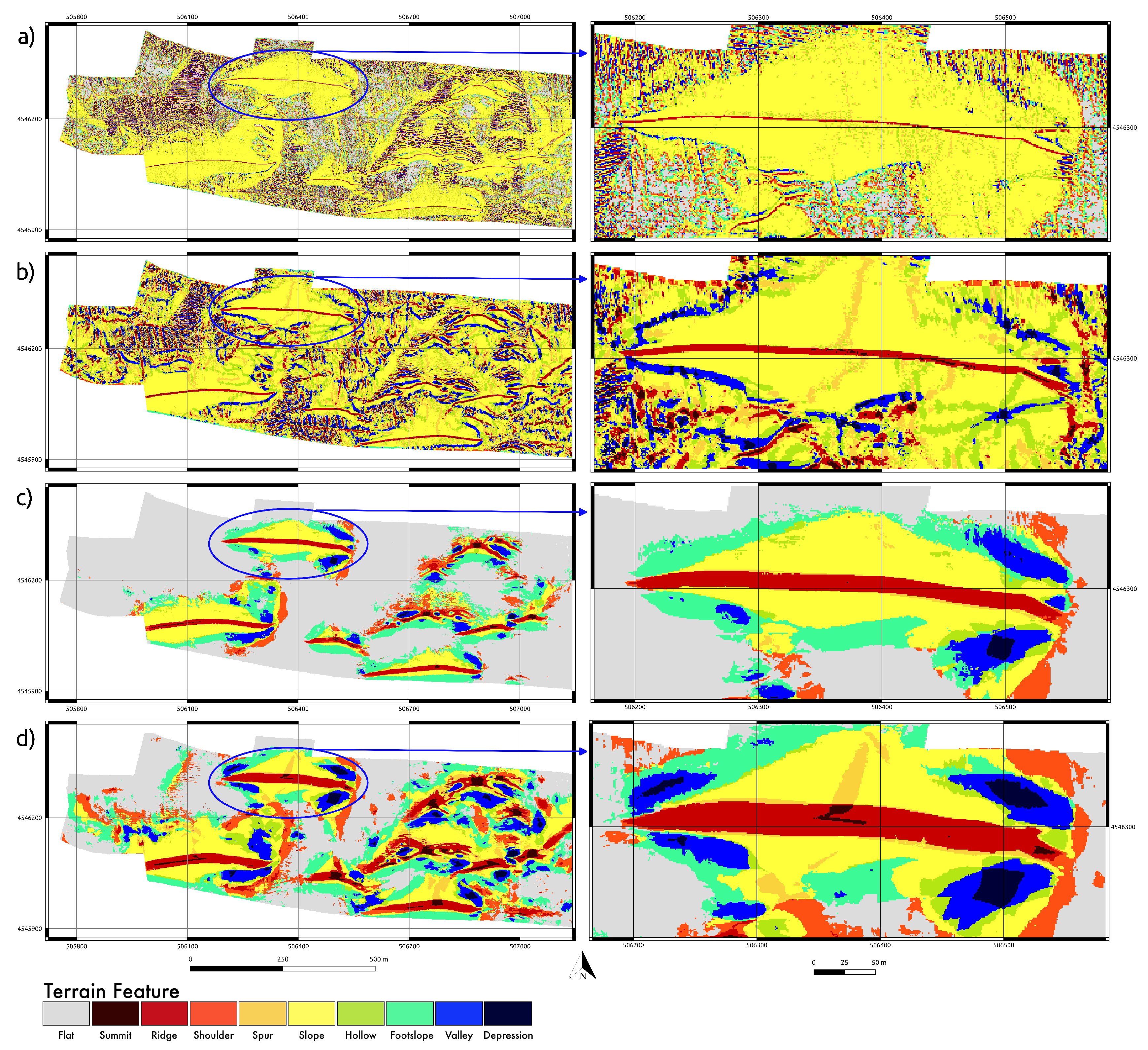
2.3.1. Terrain Feature Extraction (TFE)
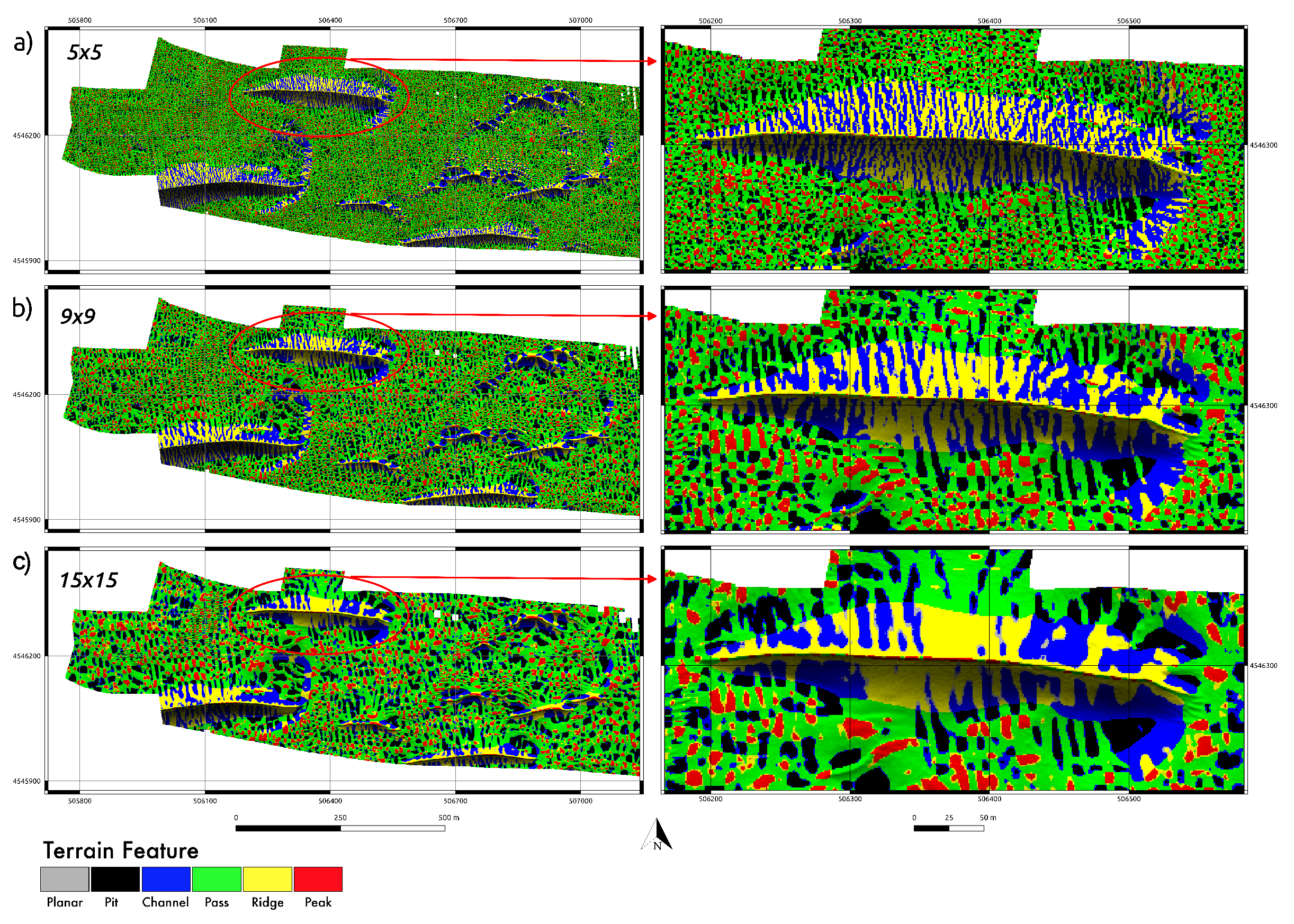
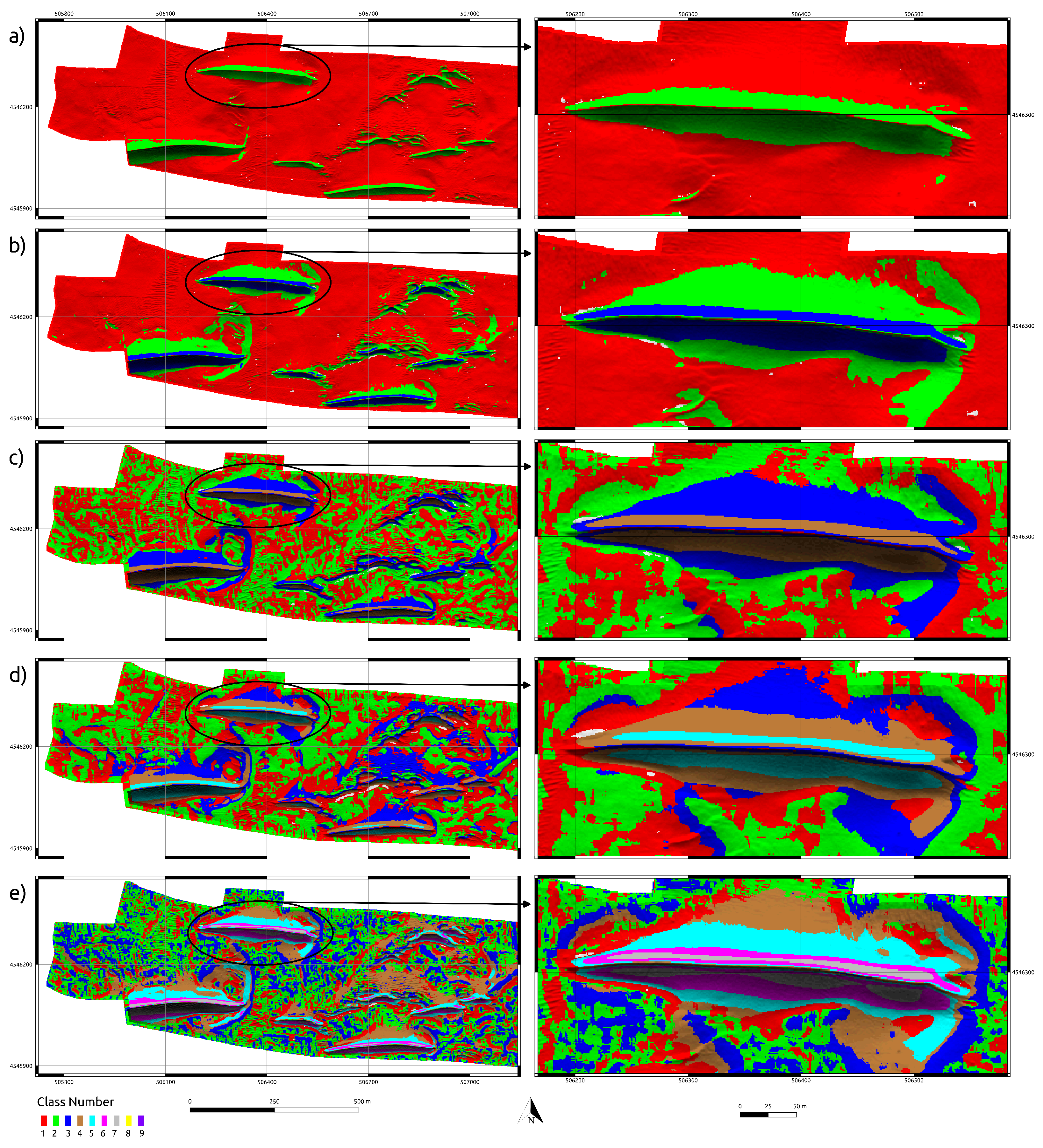
2.3.2. TFE Model Simulation
2.3.3. Geospatial Rule-Based Model-GRM
- Extract and vectorize sand wave crest (SWC).
- Extract and vectorize sand wave main body (SW).
- Identify lee and stoss side and compute sand wave’s metrics.
- Extract and vectorize sand wave crest for each bedform
- 1.1.
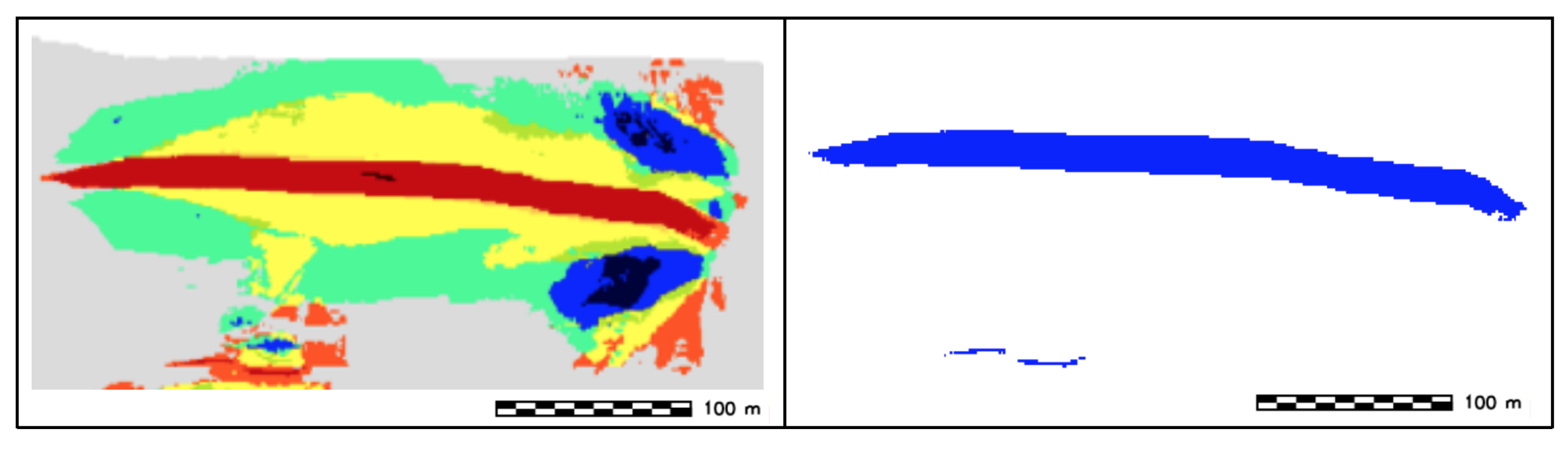
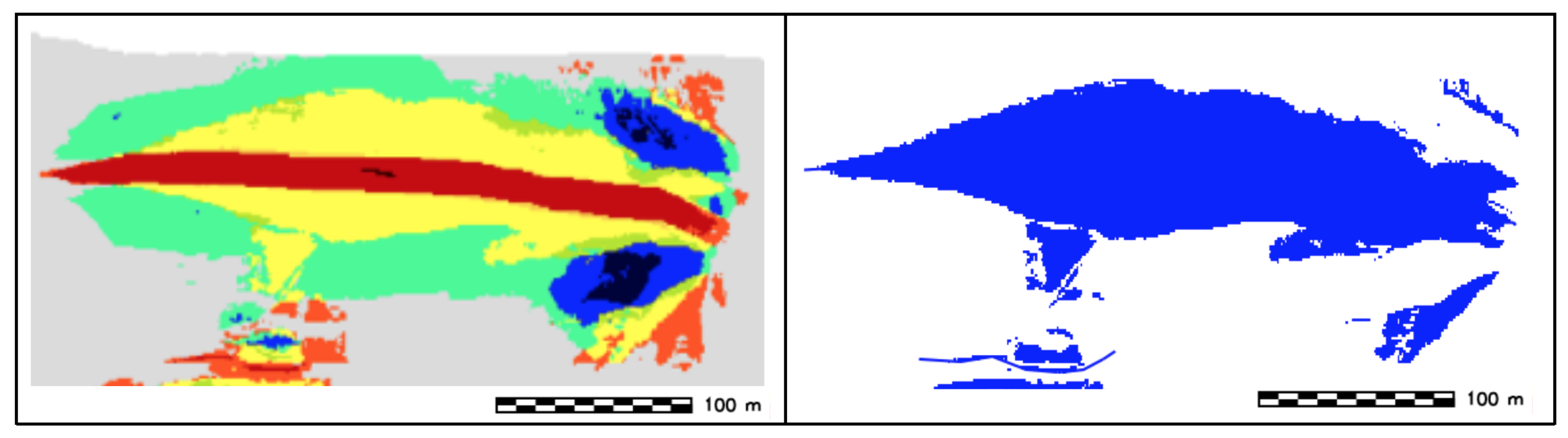
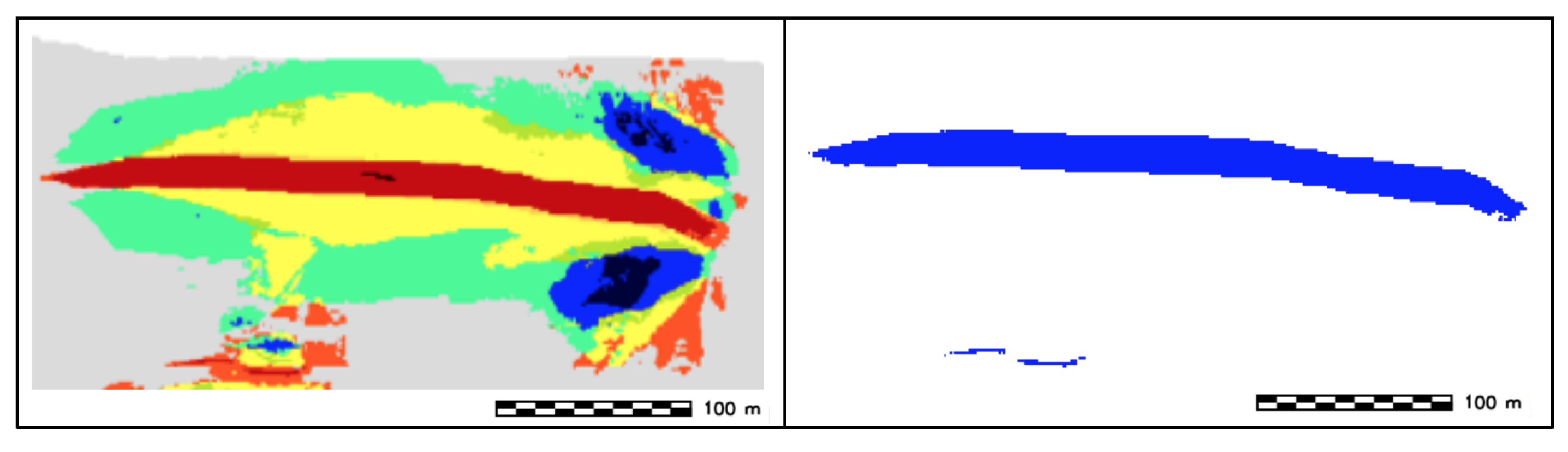
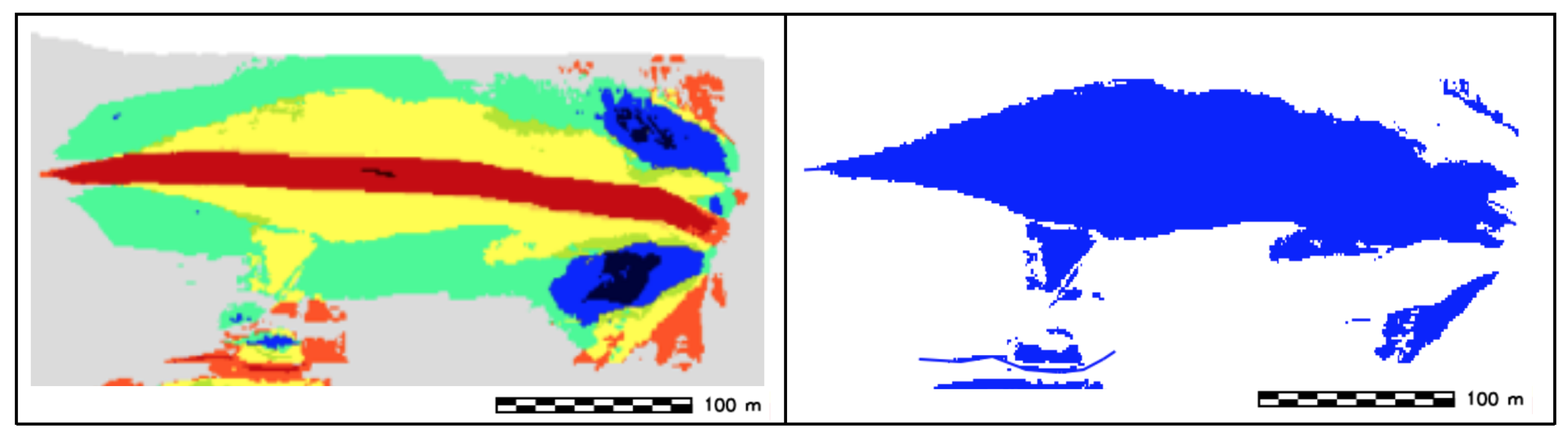
- Extraction of sand wave crest (SWC): From the TFE results (r.geomorphon), SWC are identified by extracted by reclassifying the cells with feature type equal to ridge and summit (feature type class: 2,3) into a new raster feature with category value 1 and setting the remaining cells to null (Figure 7).
- 1.2.
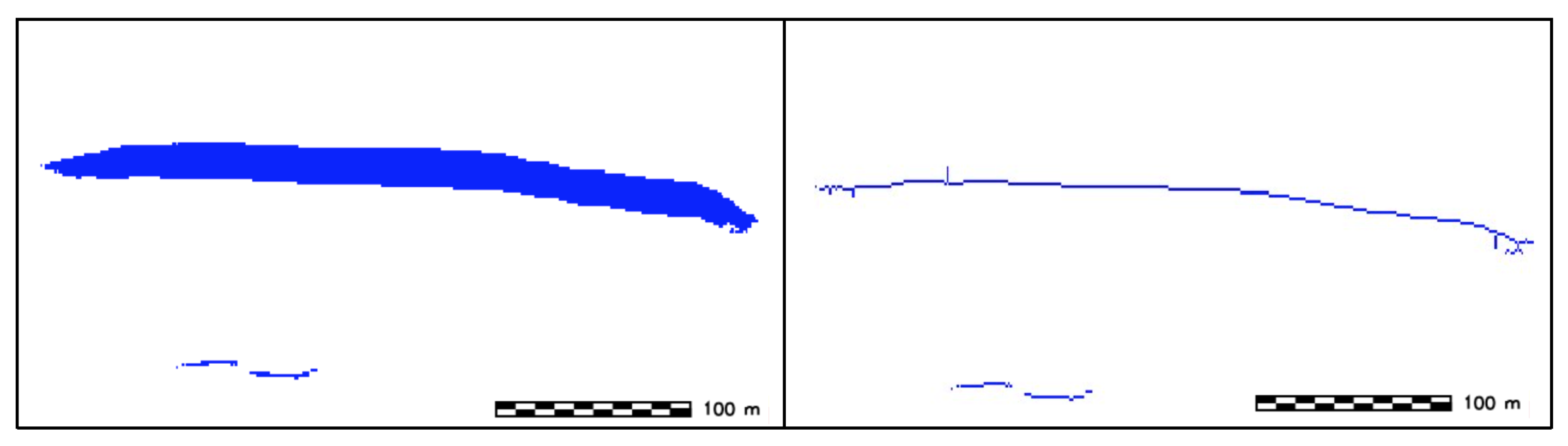
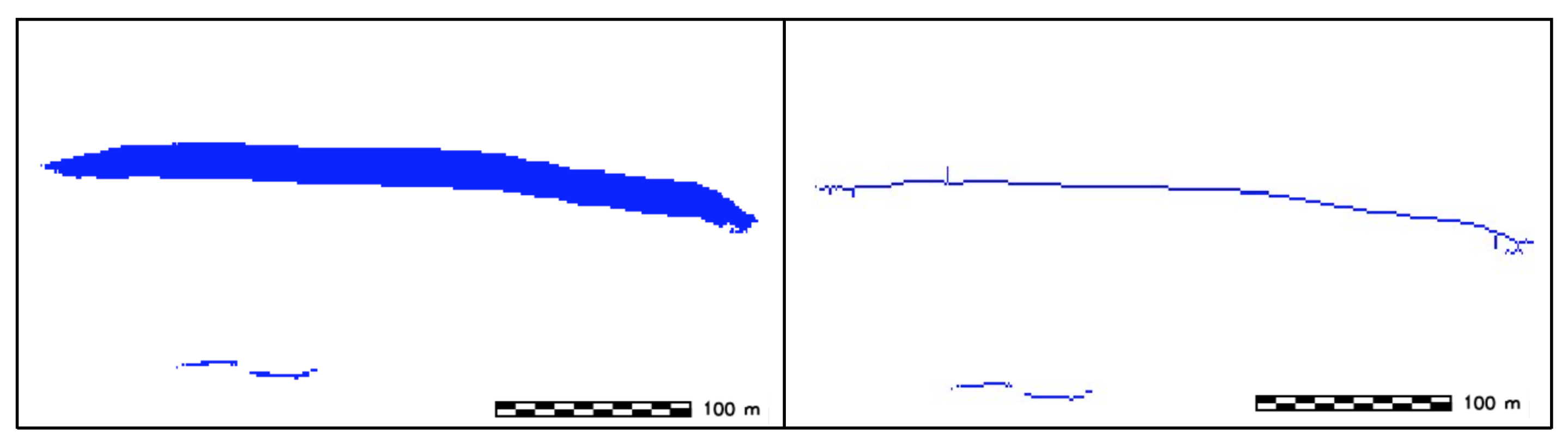
- SWC thinning: SWC areas are thinned and reduced to a single pixel width (Figure 8).
- 1.3.
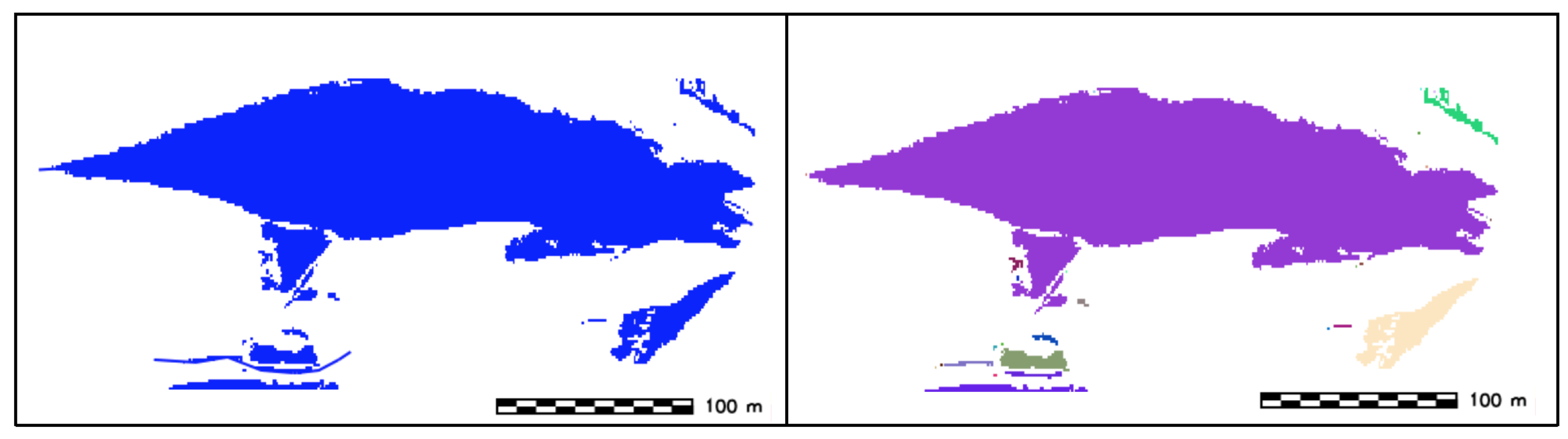
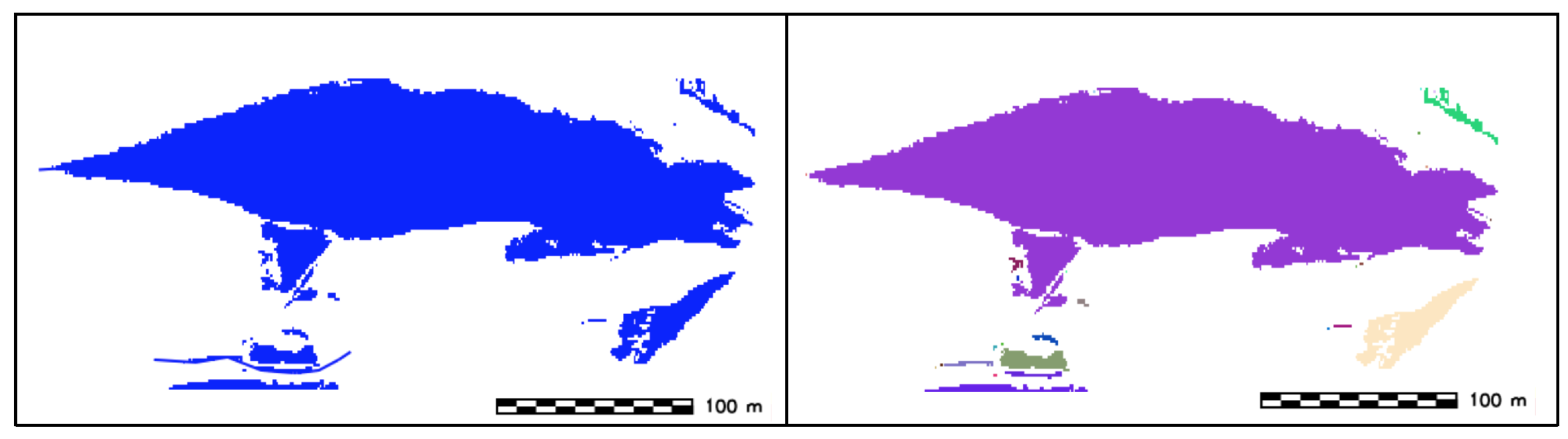
- SWC clumping: Each SWC is recategorized by grouping cells that form physically discrete areas into unique categories and assign a distinct color to each raster feature, different colors are assigned to each linear feature (Figure 9).
- 1.4.
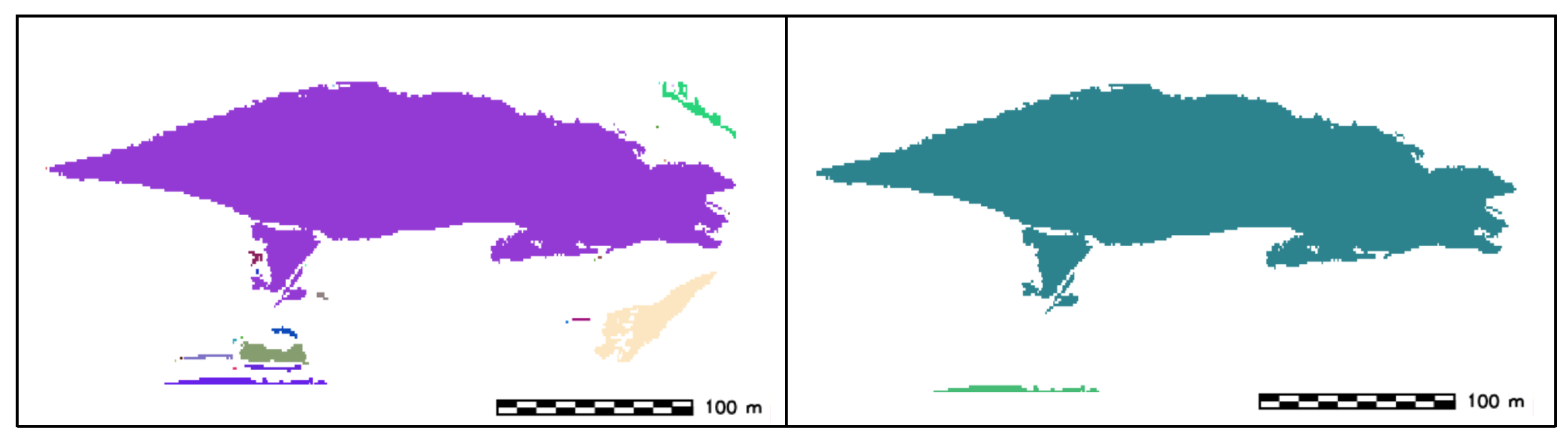
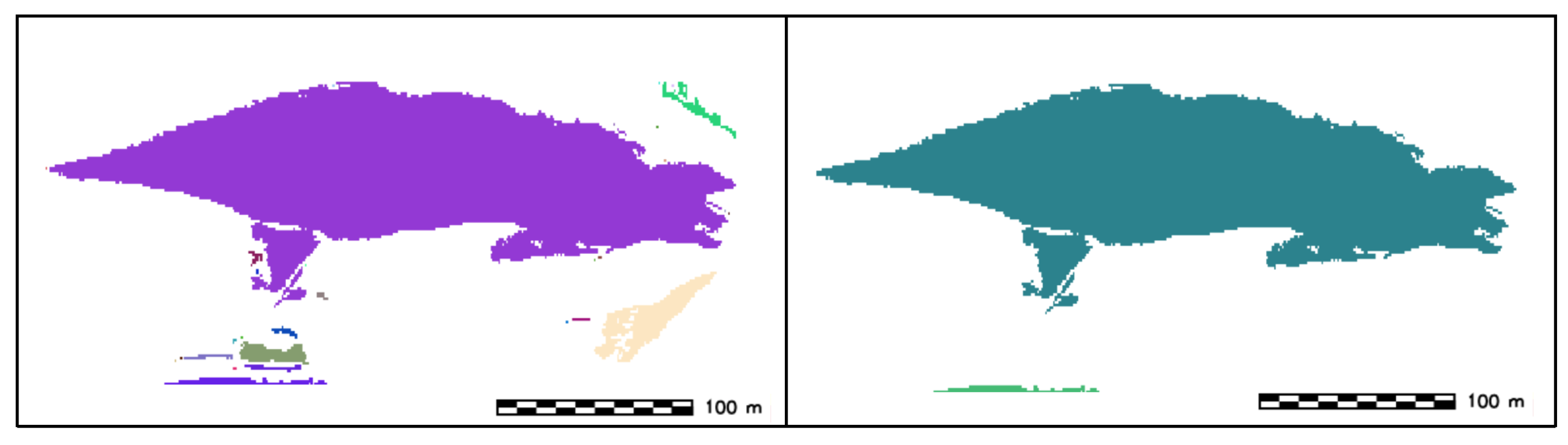
- SWC filtering by length: Each feature with same category shorter than a given threshold is removed (Figure 10).
- 1.5.
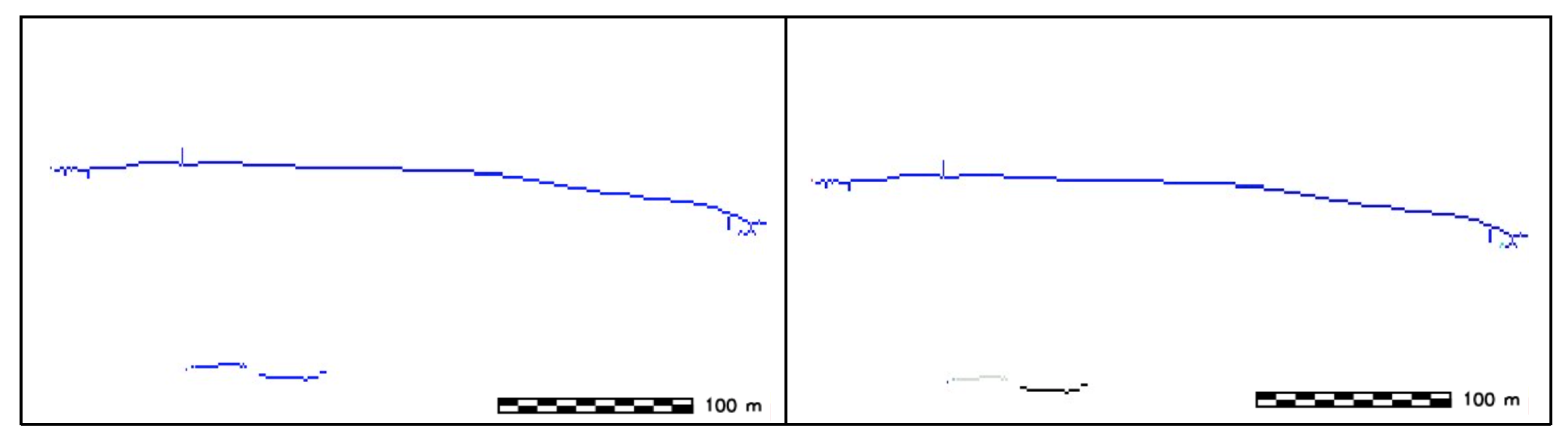
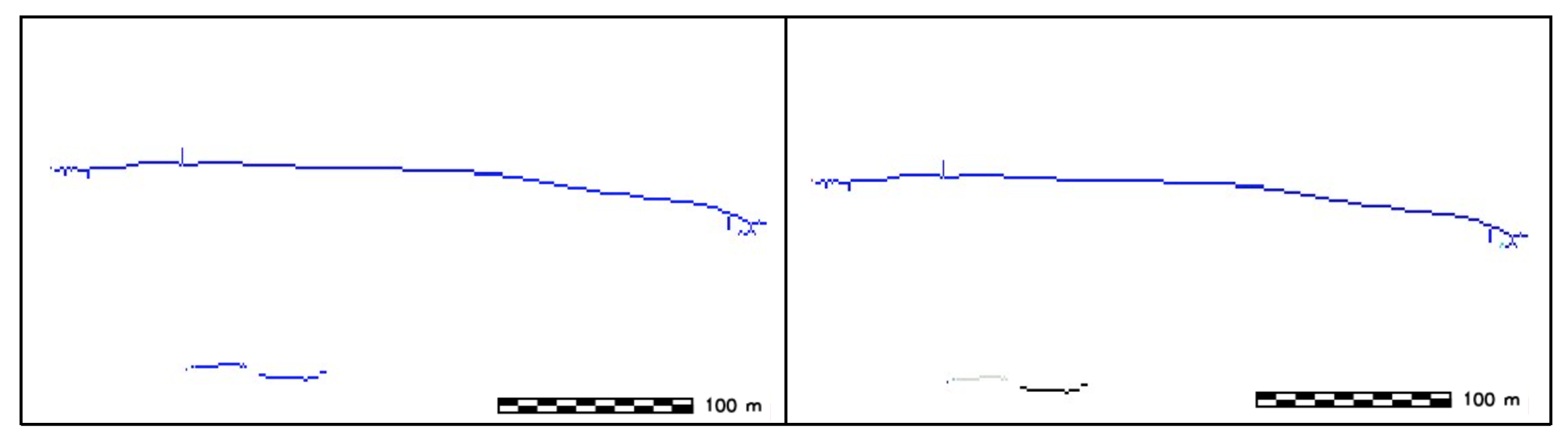
- SWC vectorization: Conversion from raster to vector to obtain a vector feature of type line representing an approximate sand wave crest (Figure 11).
- 1.6.
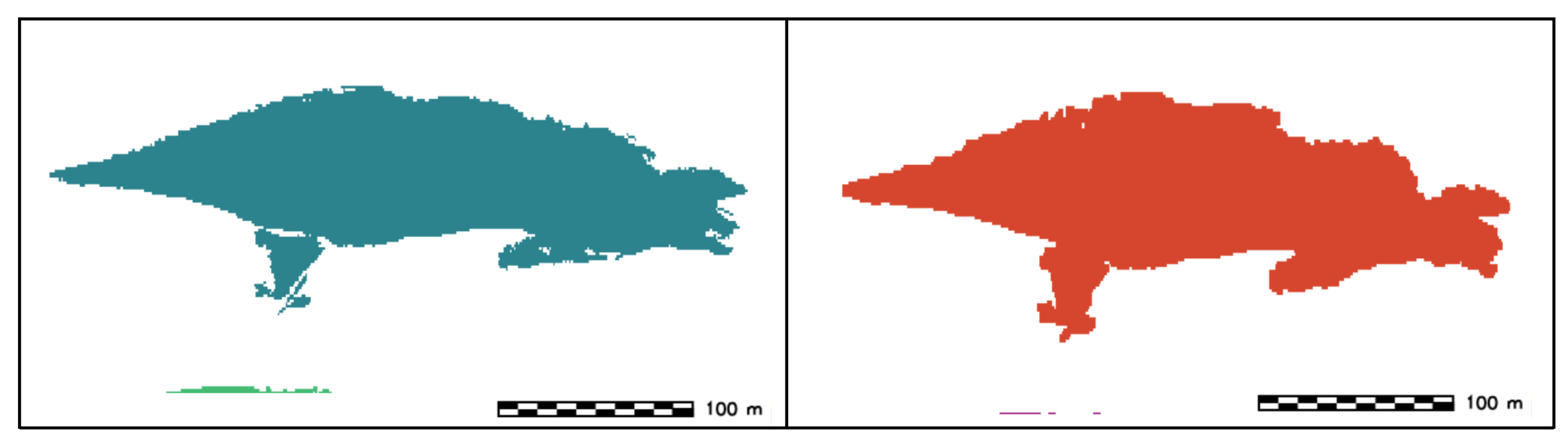
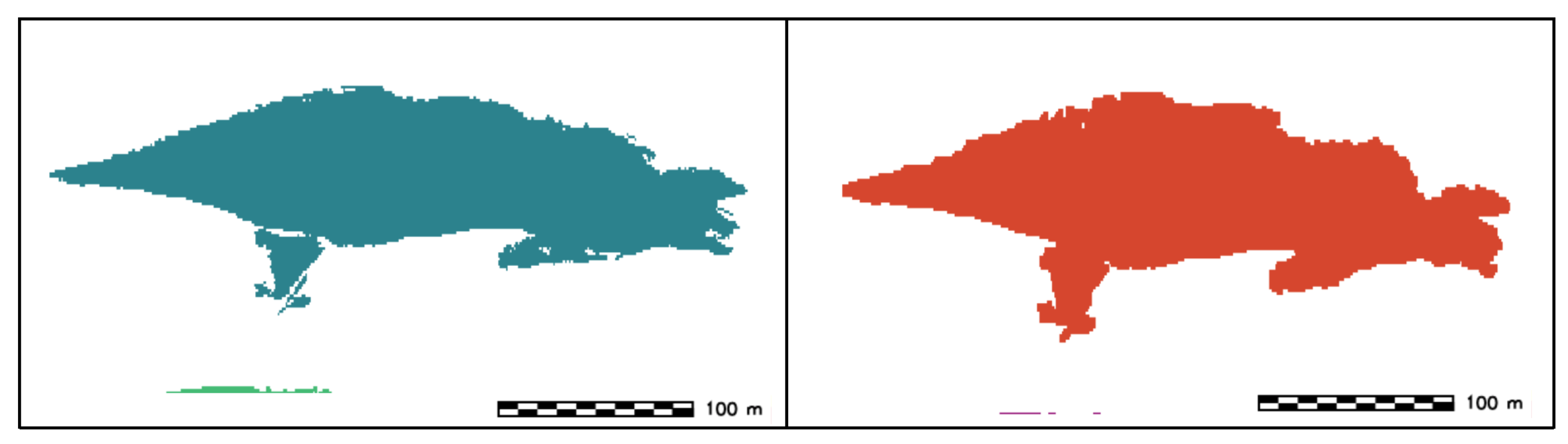
- SWC topological cleaning: Line features are cleaned by removing any dangle (Figure 12).
- 1.7.
- SWC smoothing: A low pass filter is used to obtain a vectorized Sand Wave Crest (Figure 13).
- Identify areas covered by large scale bedforms
- 2.1.
- Sand wave (SW) extraction: From the TFE results (r.geomorphon), the entire landform is extracted by reclassifying the cells with feature type equal to summit, ridge, spur, and slope (feature type: class 2, 3, 5, 6) into a new raster feature with category value 1, and setting the remaining cells to null (Figure 14).
- 2.2.
- SW clumping: The SW raster map is recategorized by grouping cells that form physically discrete areas into unique categories and assign a distinct color to each raster feature (Figure 15).
- 2.3.
- SW filtering by area: Each raster feature is reclassified based on its area, all the features having an area smaller than a given threshold are removed (Figure 16).
- 2.4.
- SW filling: Null cells within the discrete areas are filled with the same category of the surrounding pixels (Figure 17).
- 2.5.
- SW vectorization: Conversion from raster to vector to obtain a vector feature of type polygon representing an approximate sand wave body (Figure 18).
- Identify lee and stoss side and compute sand wave’s metrics
- 3.1.
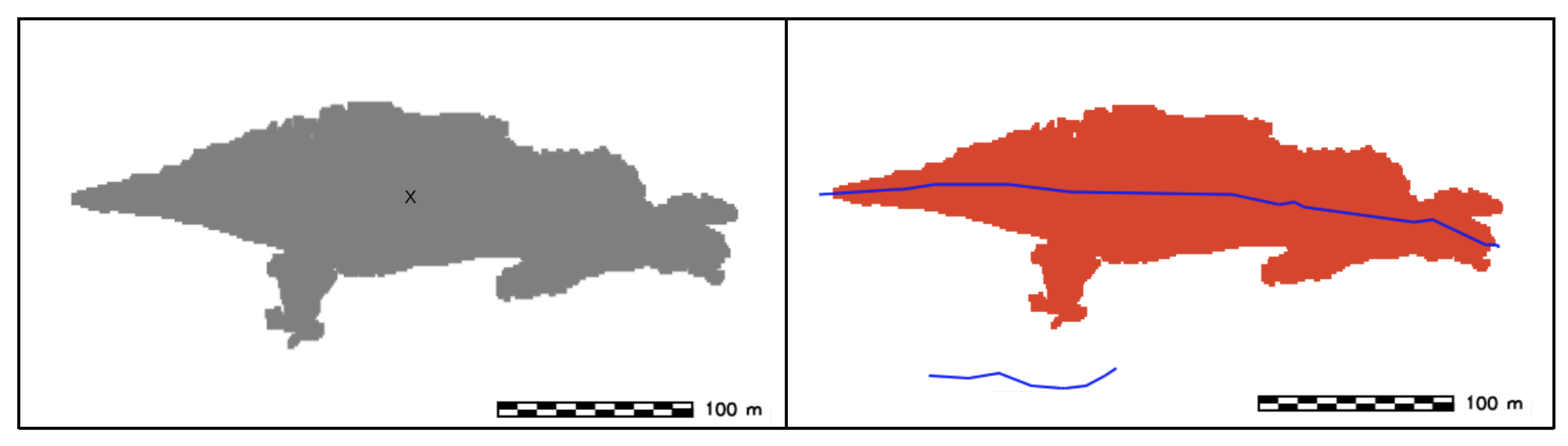
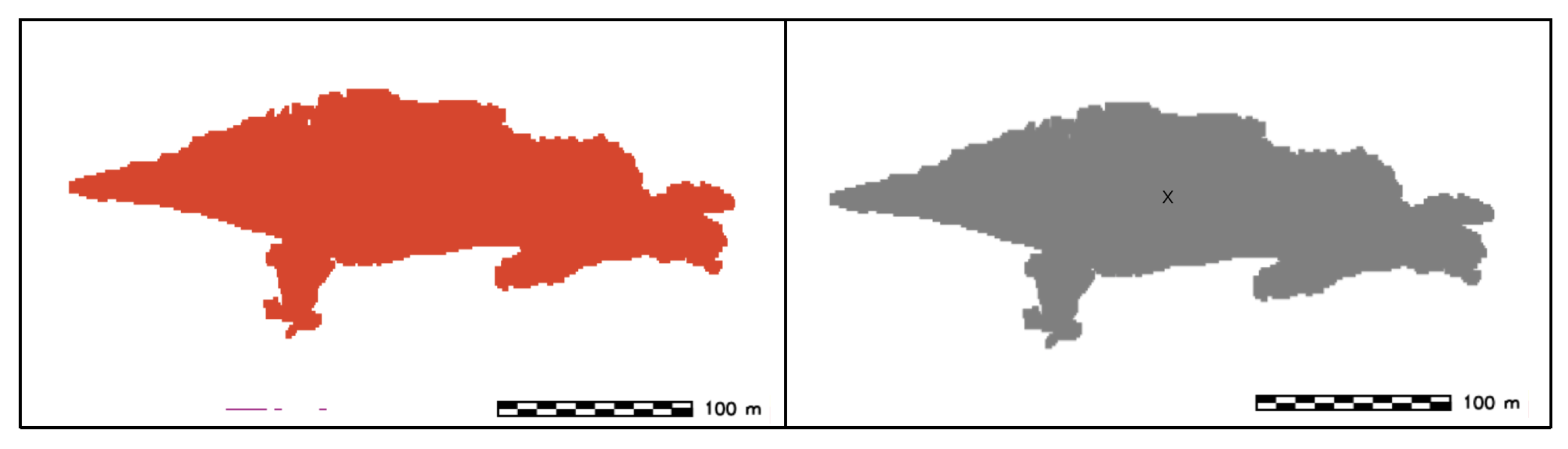
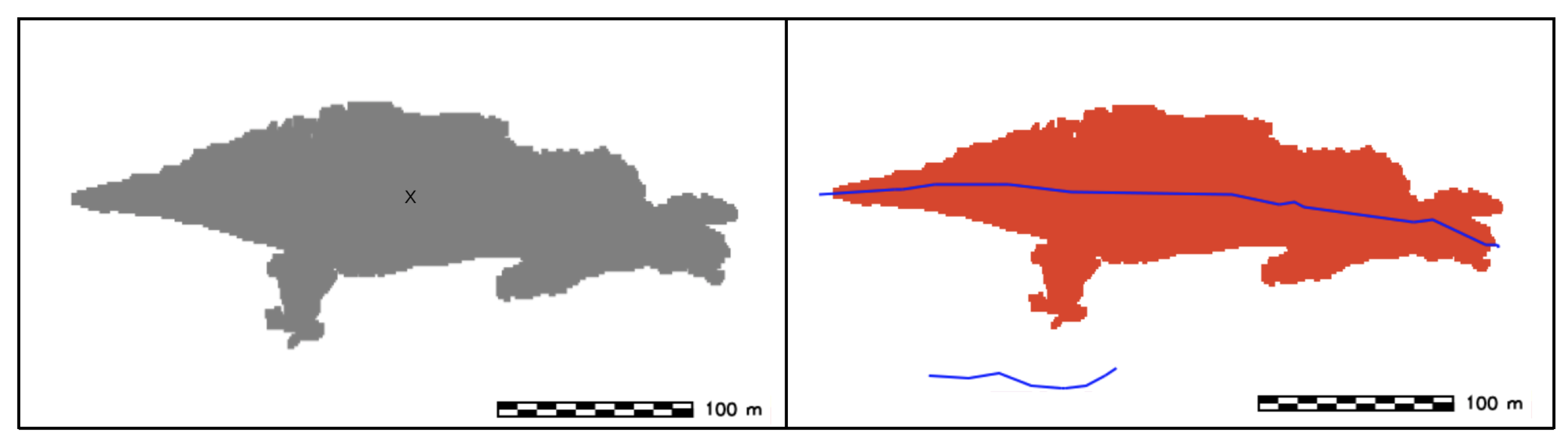
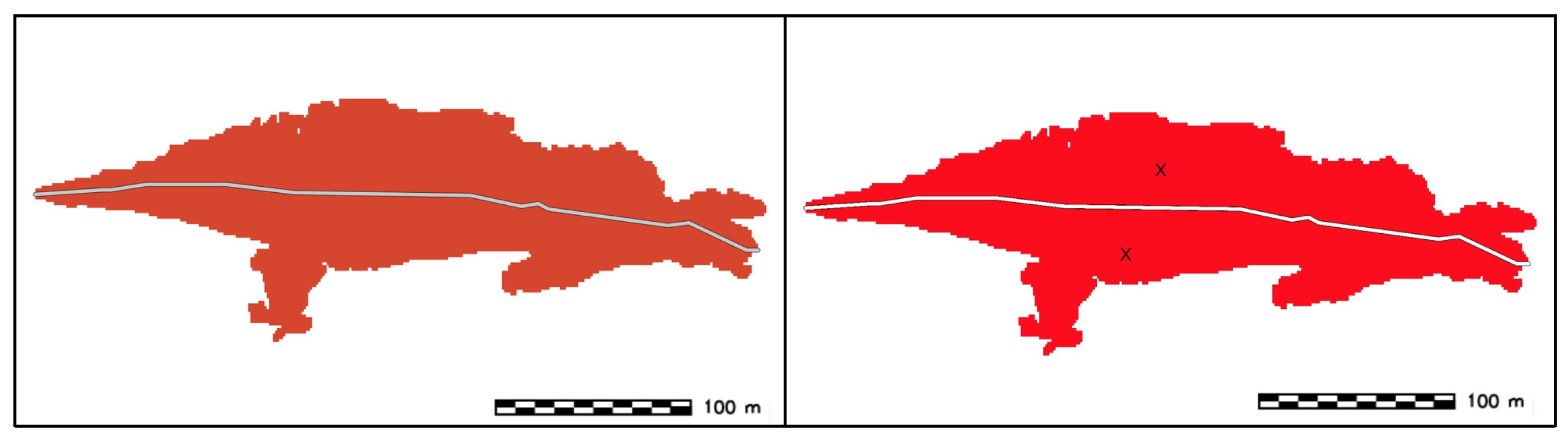
- SW and SWC overlay: The vectorized sand wave crest is overlaid on top of the polygonal area representing the sand wave body (Figure 19).
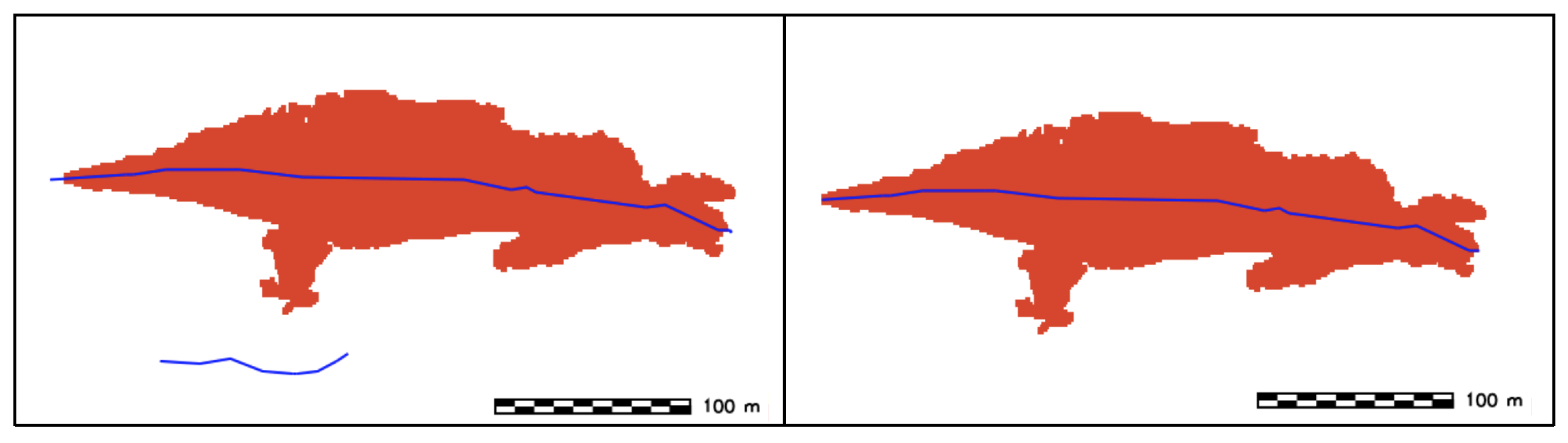
- 3.2.
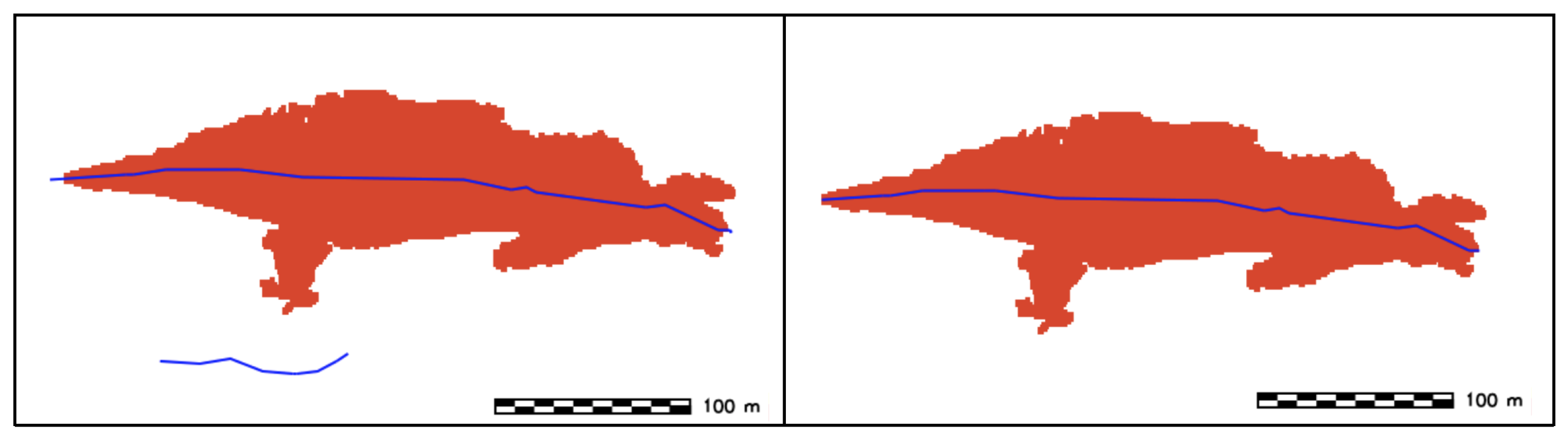
- SWC clipping: The portion of the sand wave crest that is not included in the sand wave body is removed (Figure 20).
- 3.3.
- SWC buffering: A polygonal area is created by buffering the sand wave crest (buffer distance equal to the DBM cell size) (Figure 21).
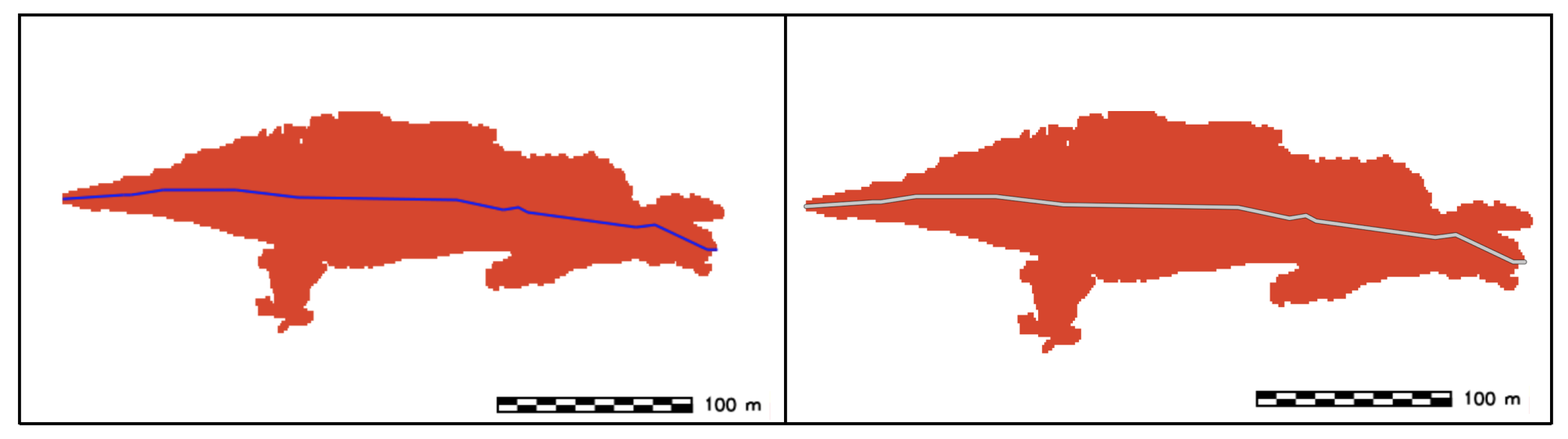
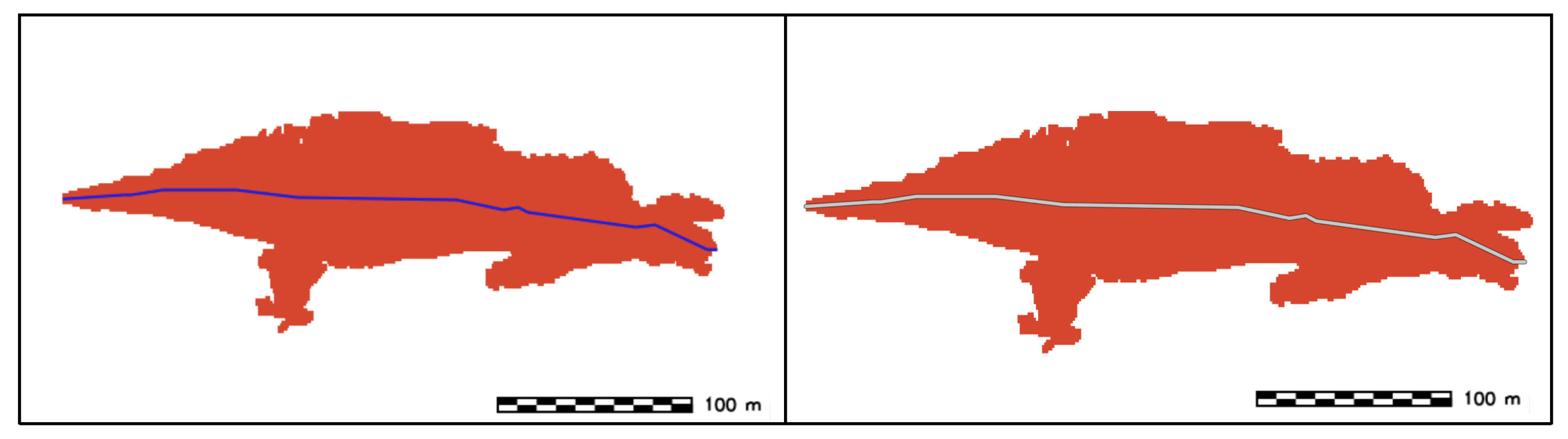
- 3.4.
- SW splitting: The buffered sand wave crest is used to split the sand wave body into two parts (Figure 22).
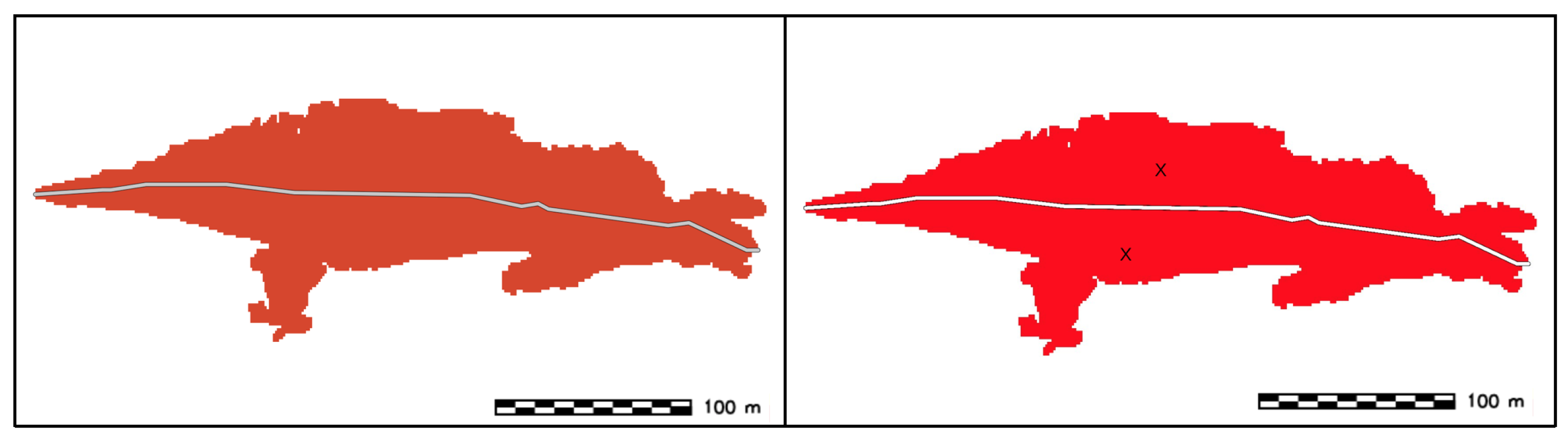
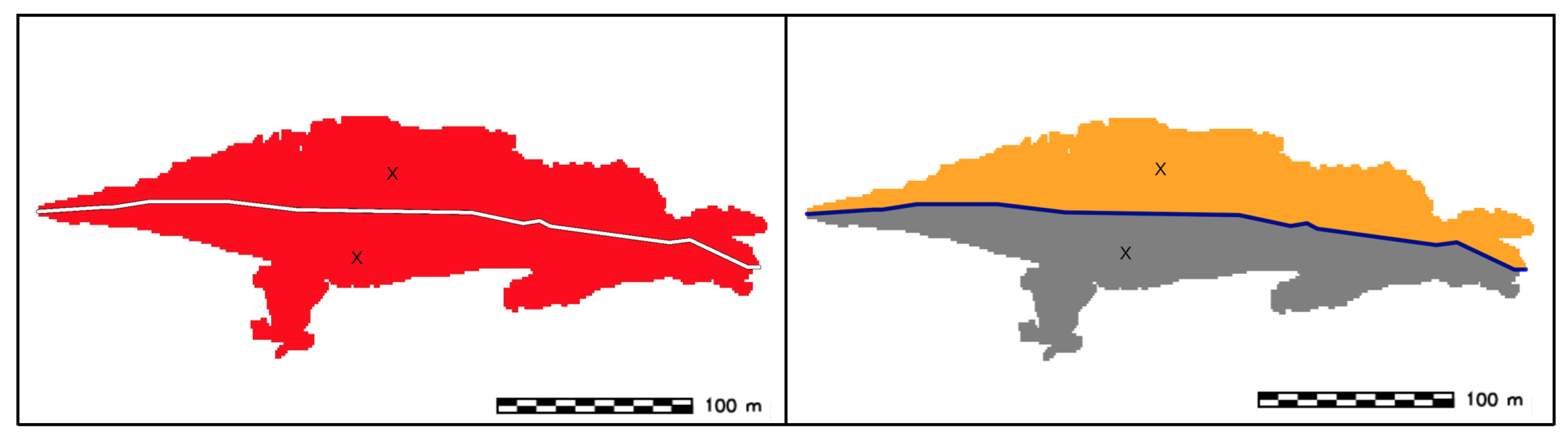
- 3.5.
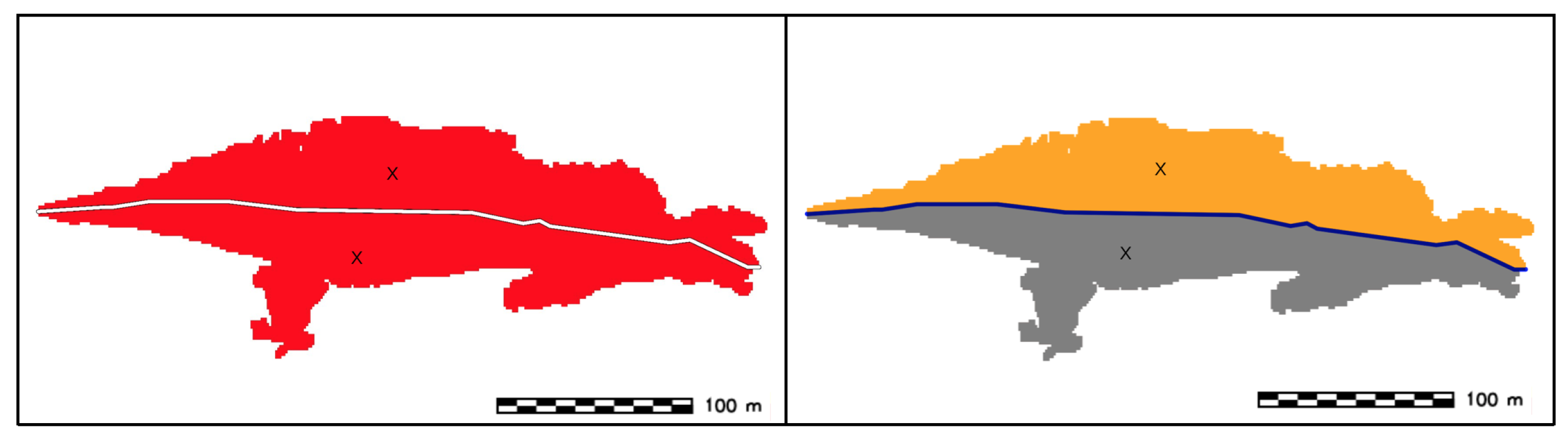
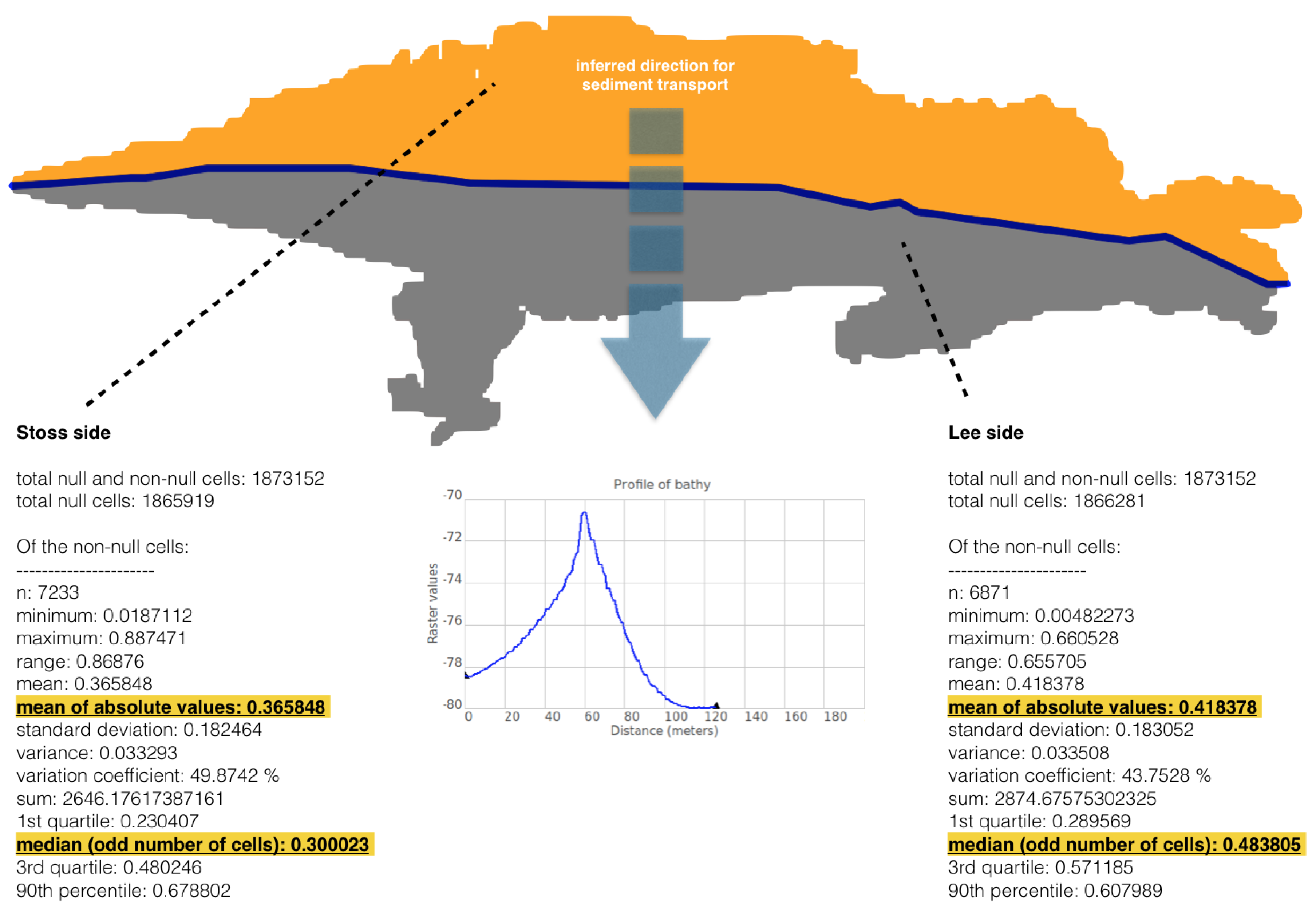
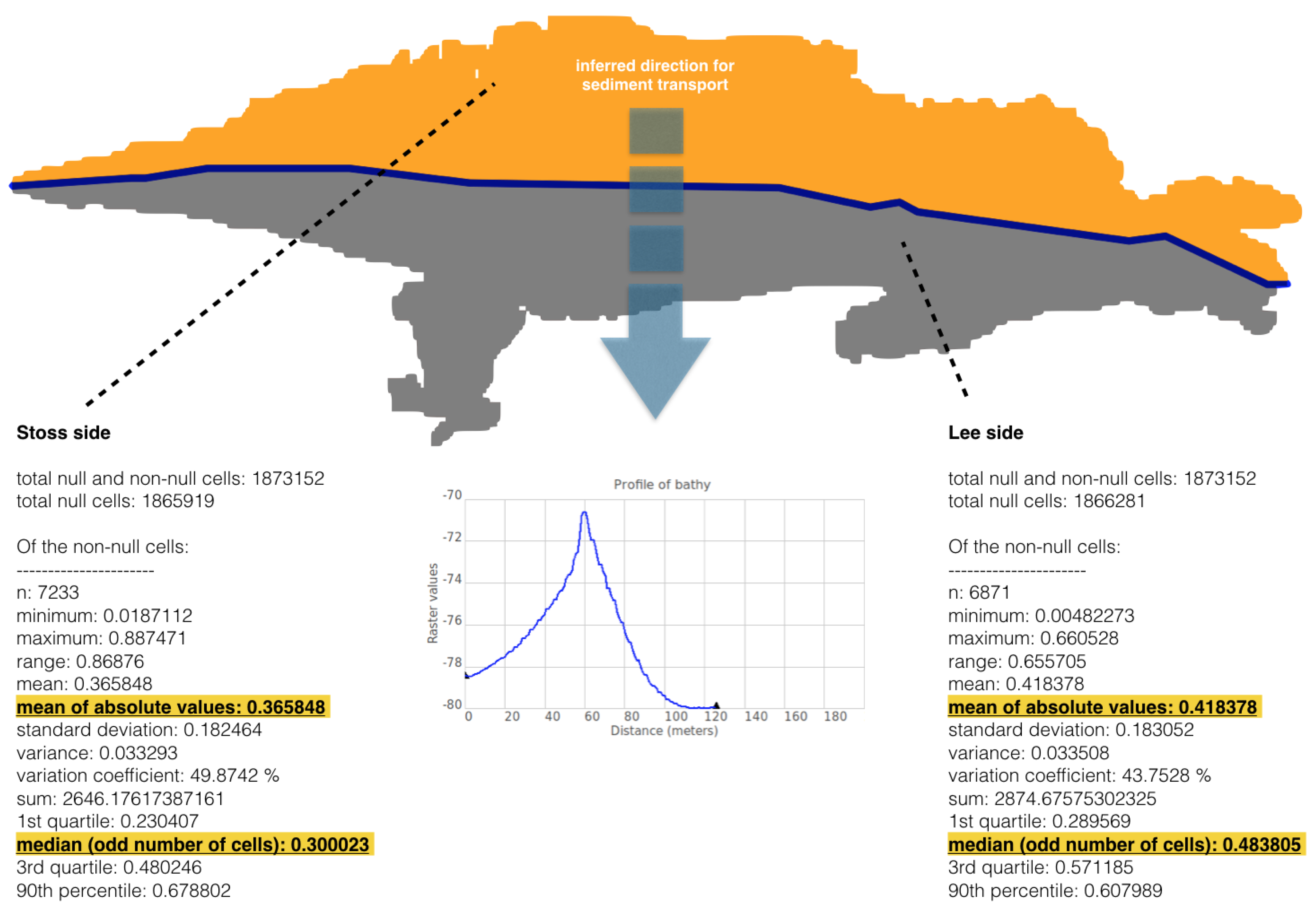
- Identification of stoss and lee side: the identification is achieved by performing an univariate statistical analysis on the DBM slope, using each sand wave side as a mask. The side with the higher values of the slope is assigned the label of lee side and is colored in grey, while the side with the lower values of the slope is assigned the label of stoss side (Figure 23).
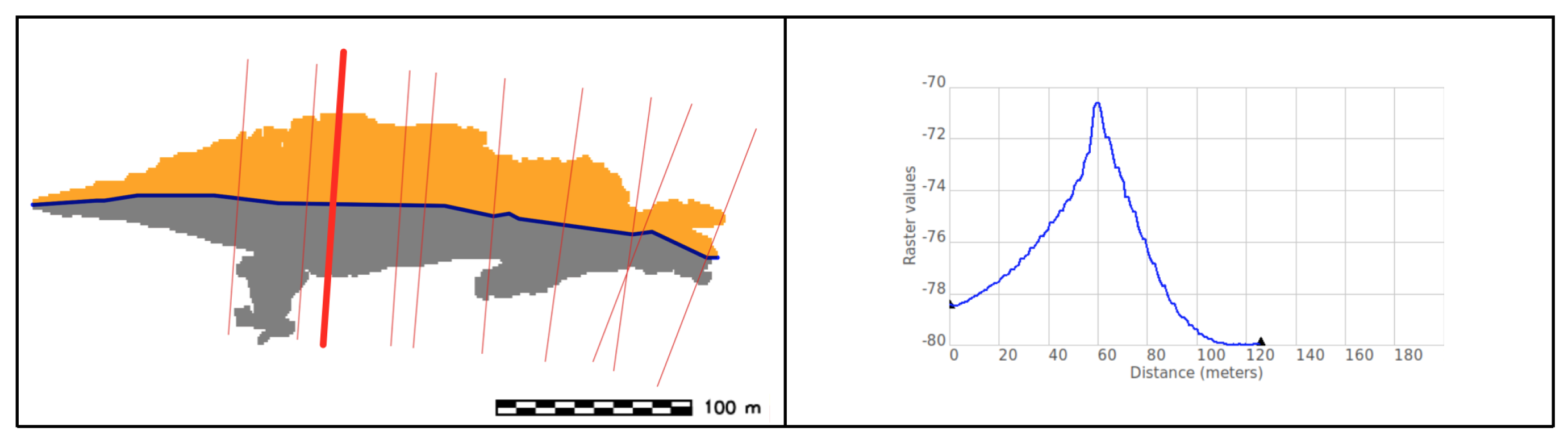
- 3.6.
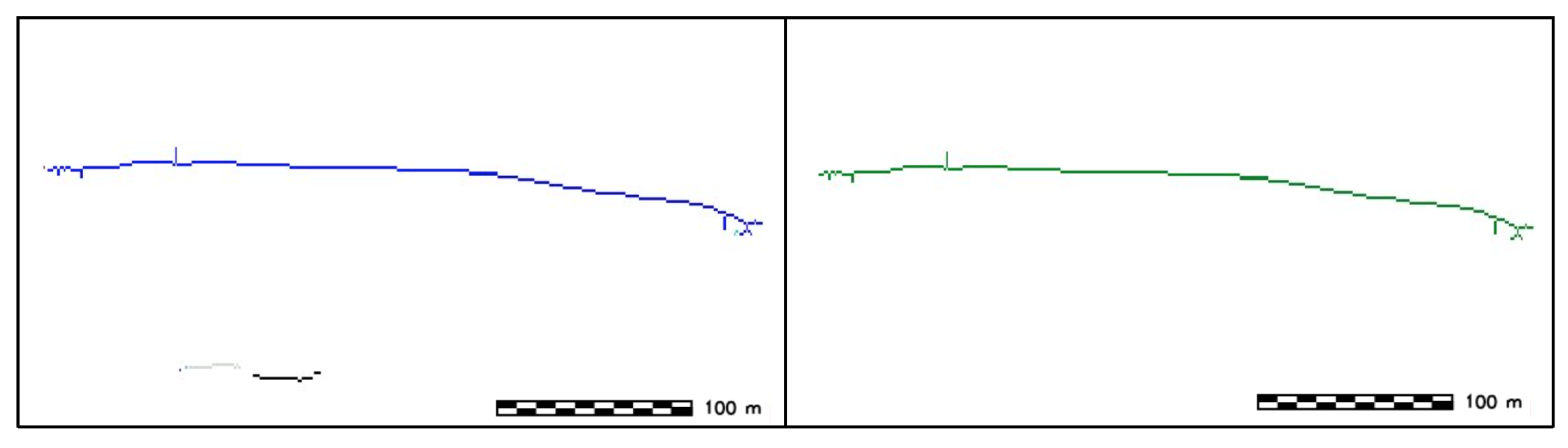
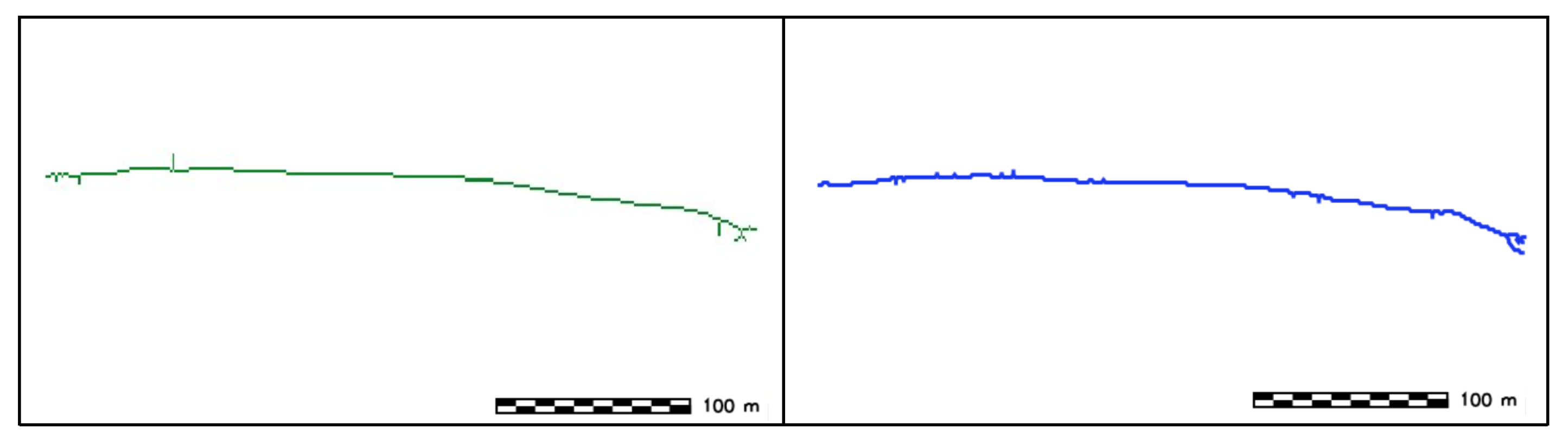
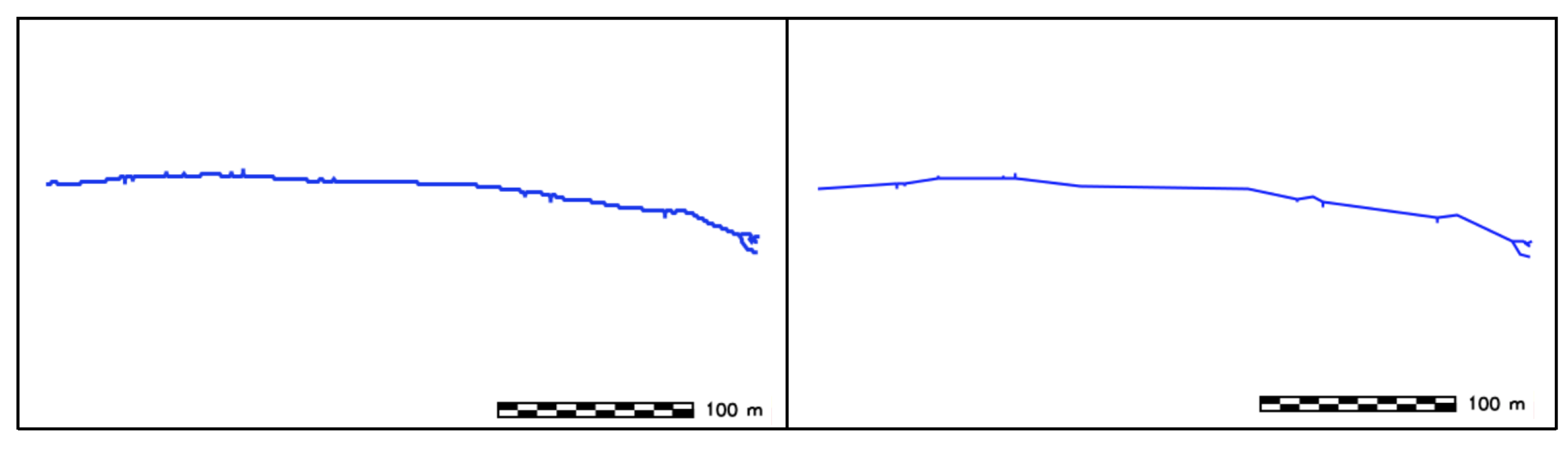
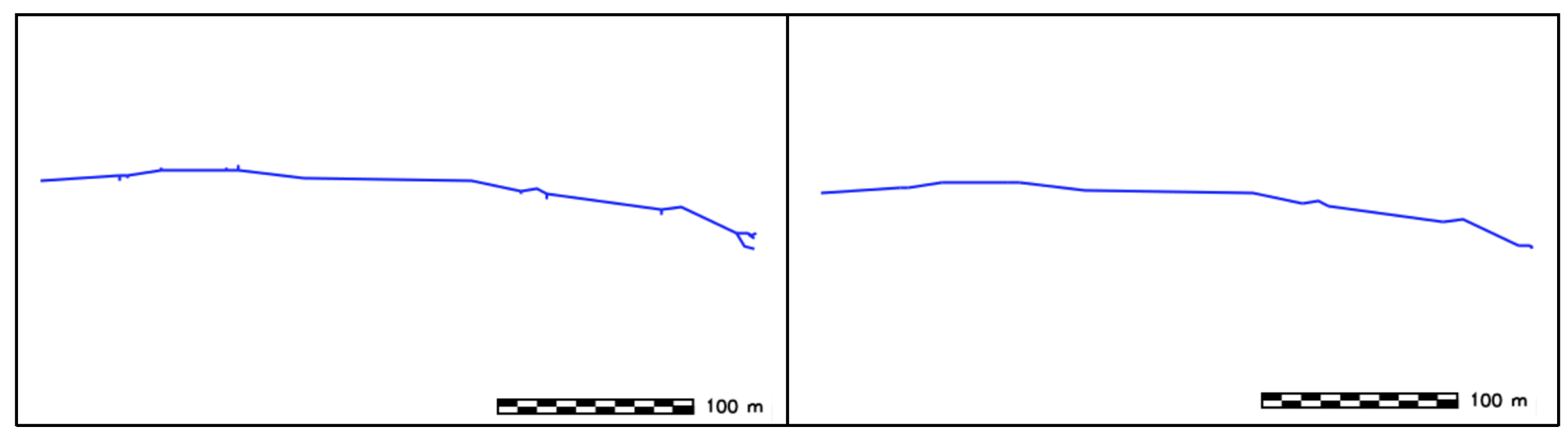
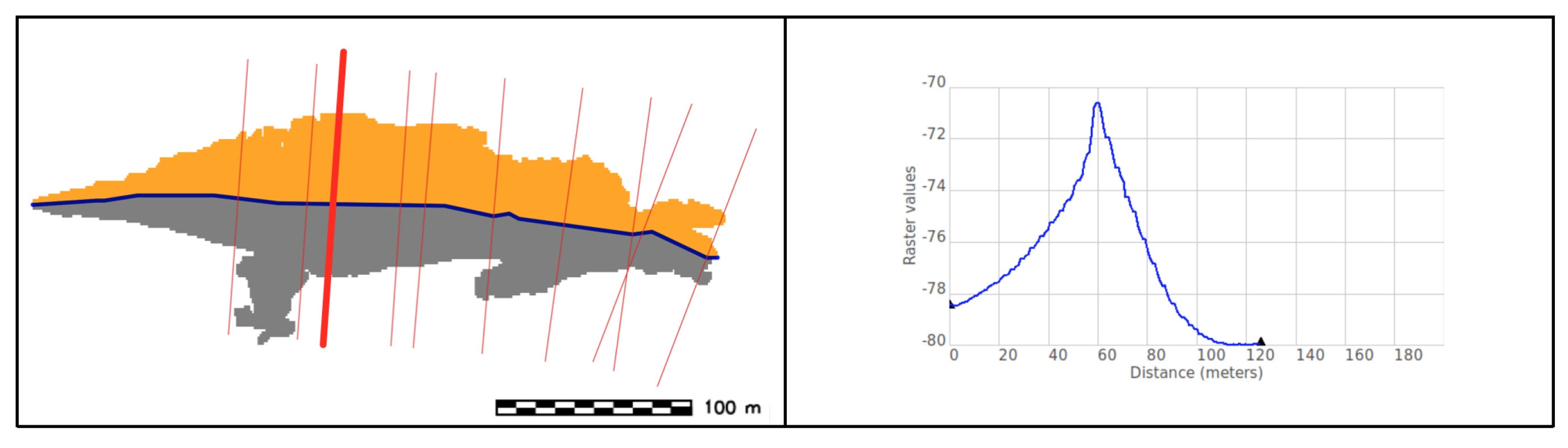
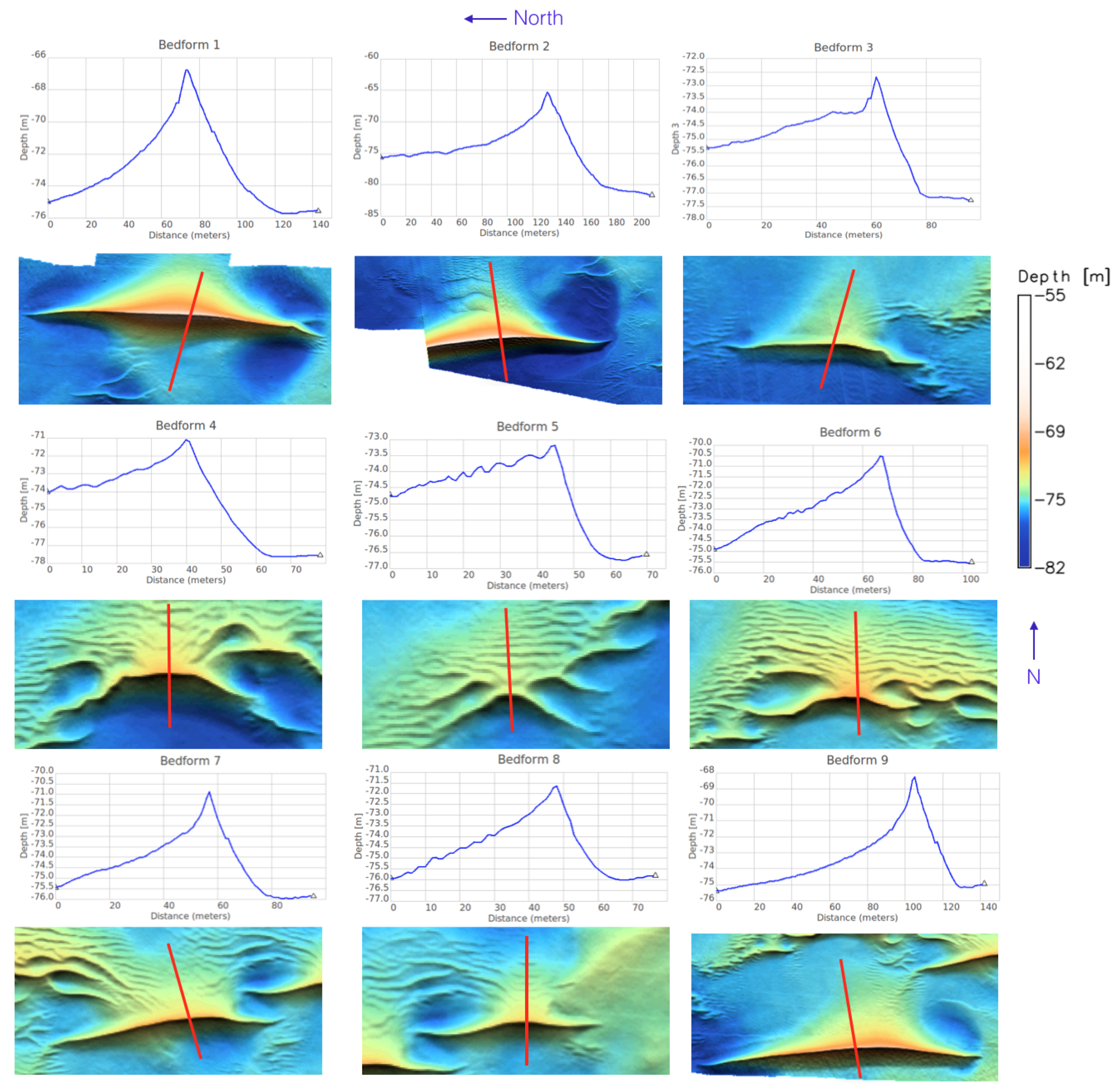
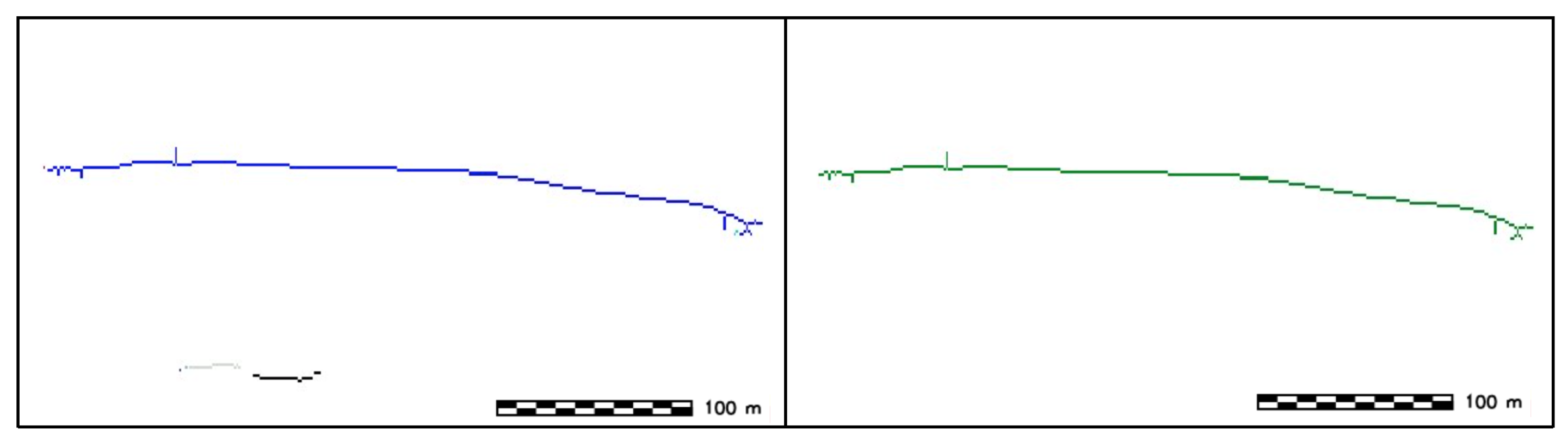
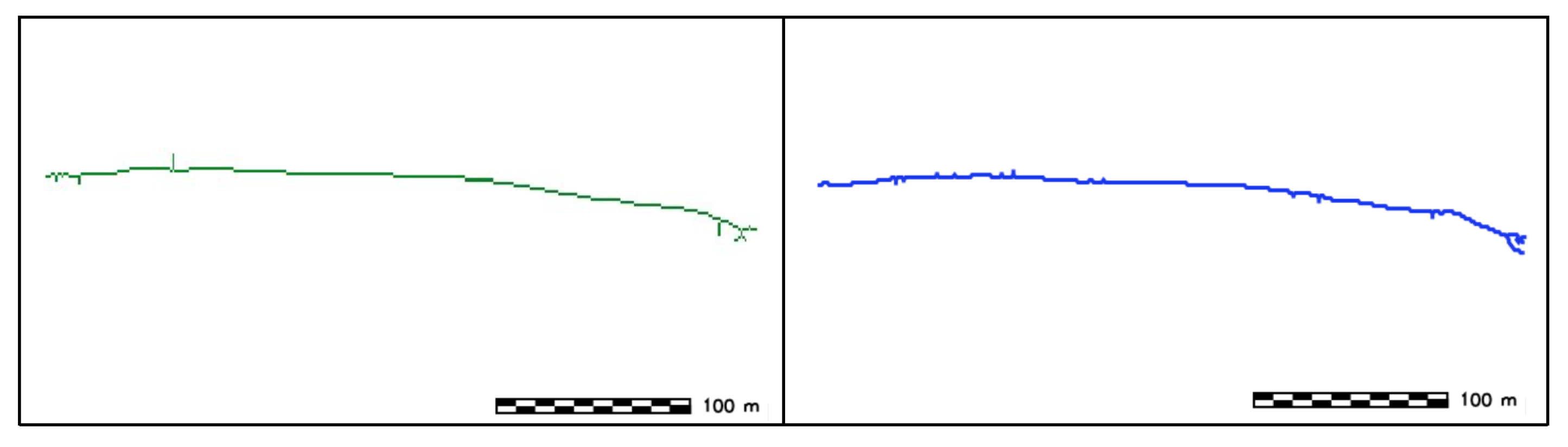
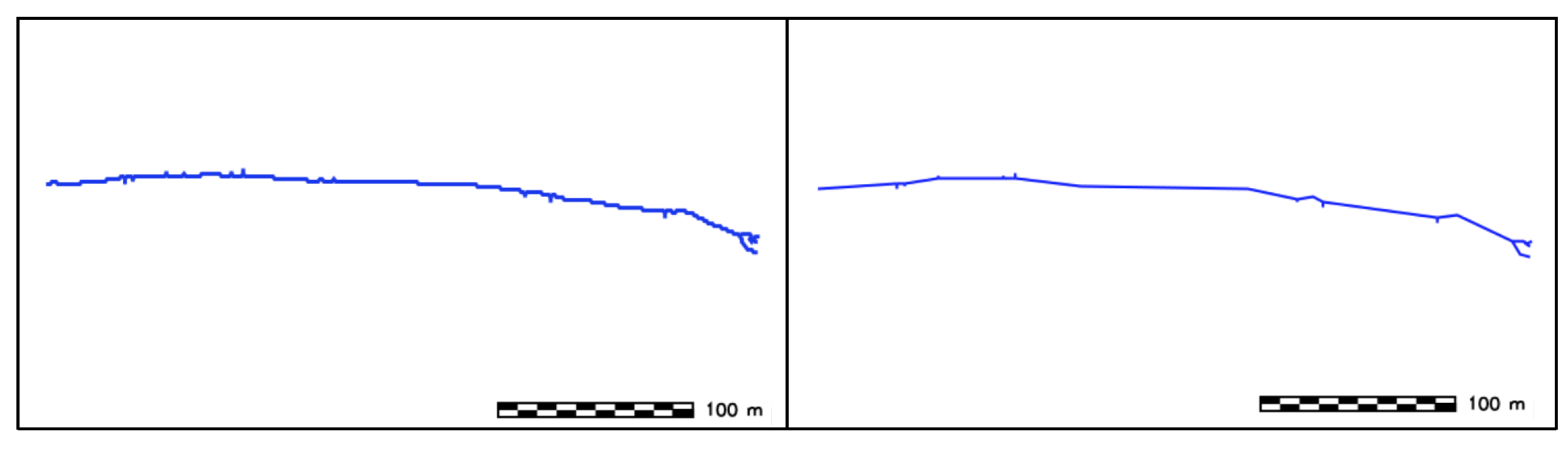
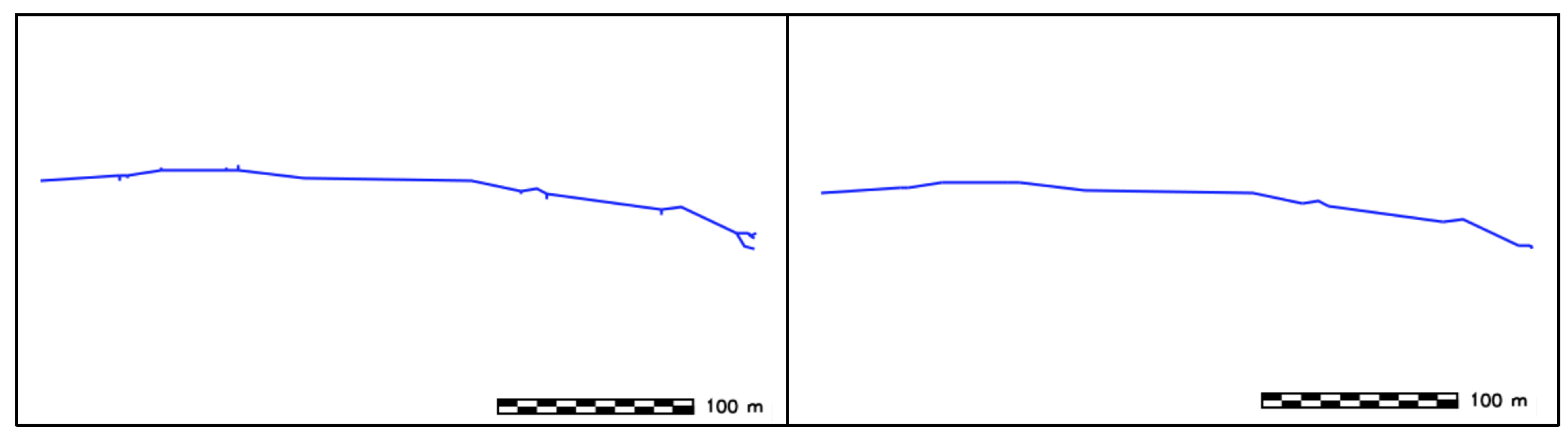
- SW height: Derivation of SW height by generating a series of vertical profiles along several transects perpendicular to SWC. The spacing between the equidistant vertical profiles is given by an input parameter and set to as default value, the length of each profile is also variable by the user (by default is set to be the same length of the sand wave ridge) (Figure 24).
- 3.7.
- SW width: Sand wave width (horn to horn) is obtained by calculating the distance between the endpoints of the sand wave crest.
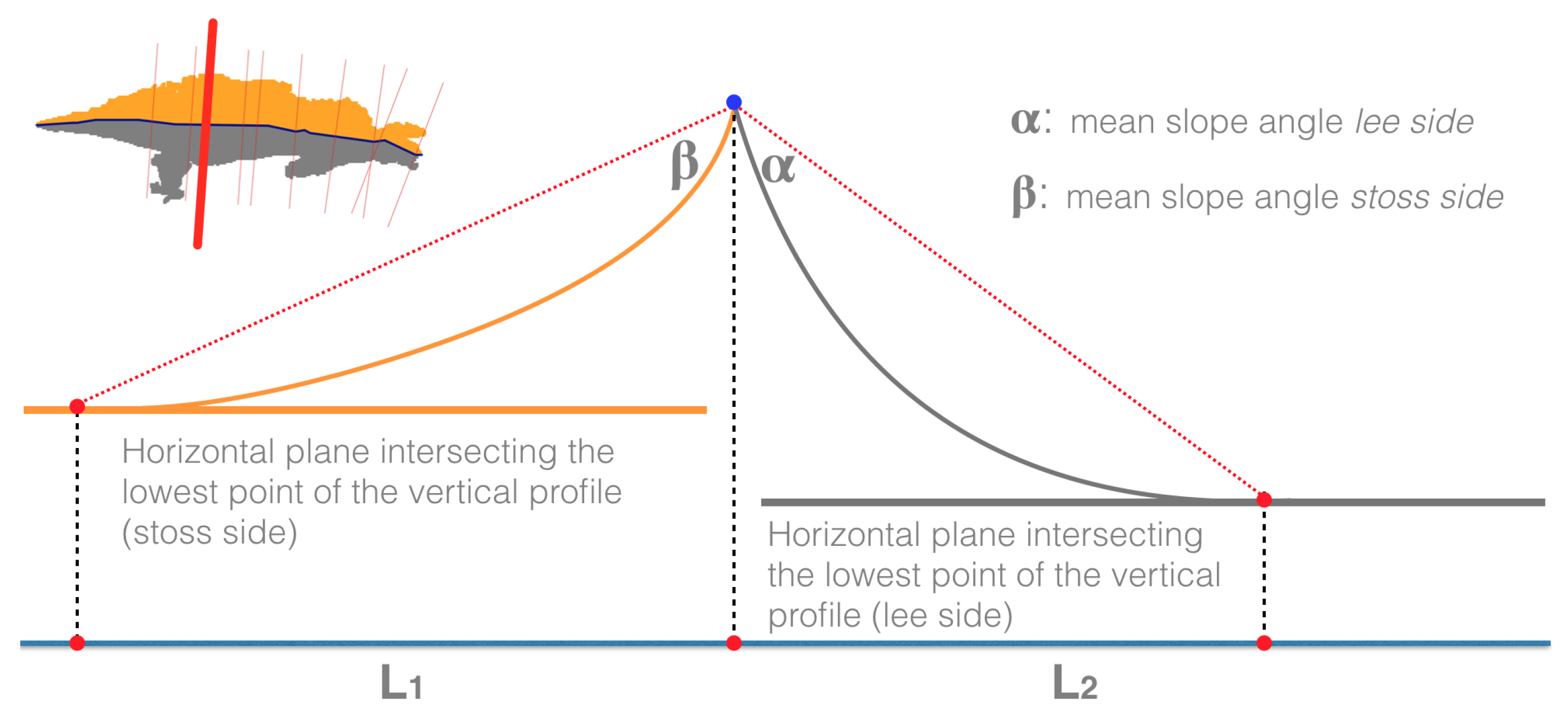
- 3.8.
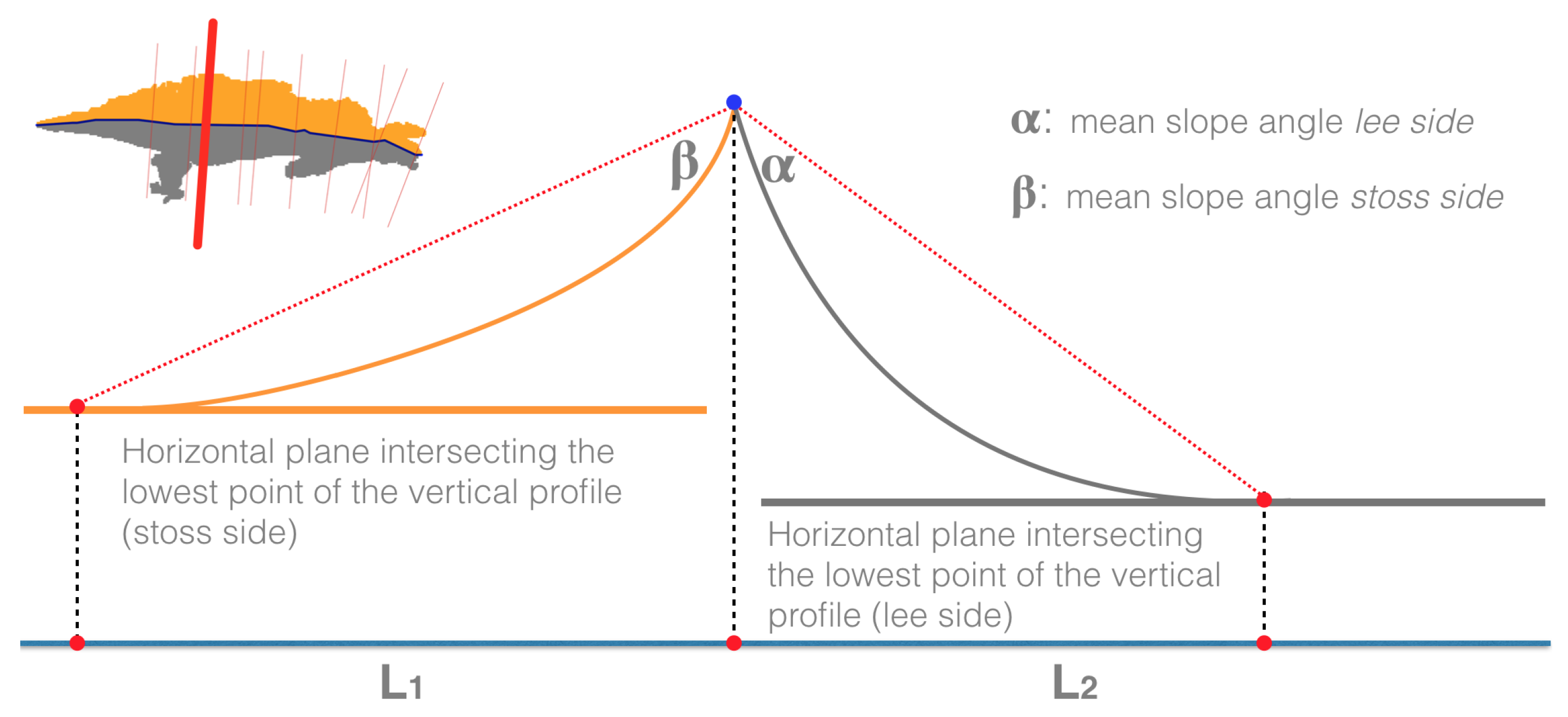
- Length: An approximate value for the length of the sand wave is obtained by following the schema in Figure 25.
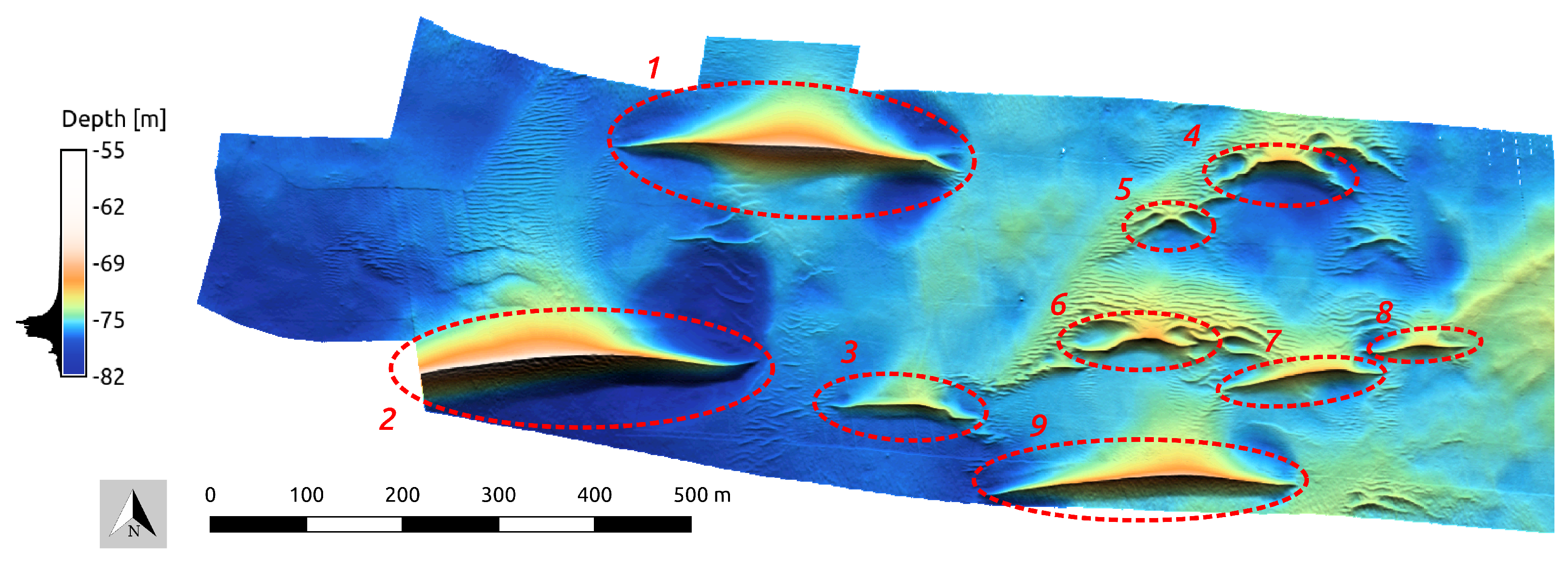
3. Results
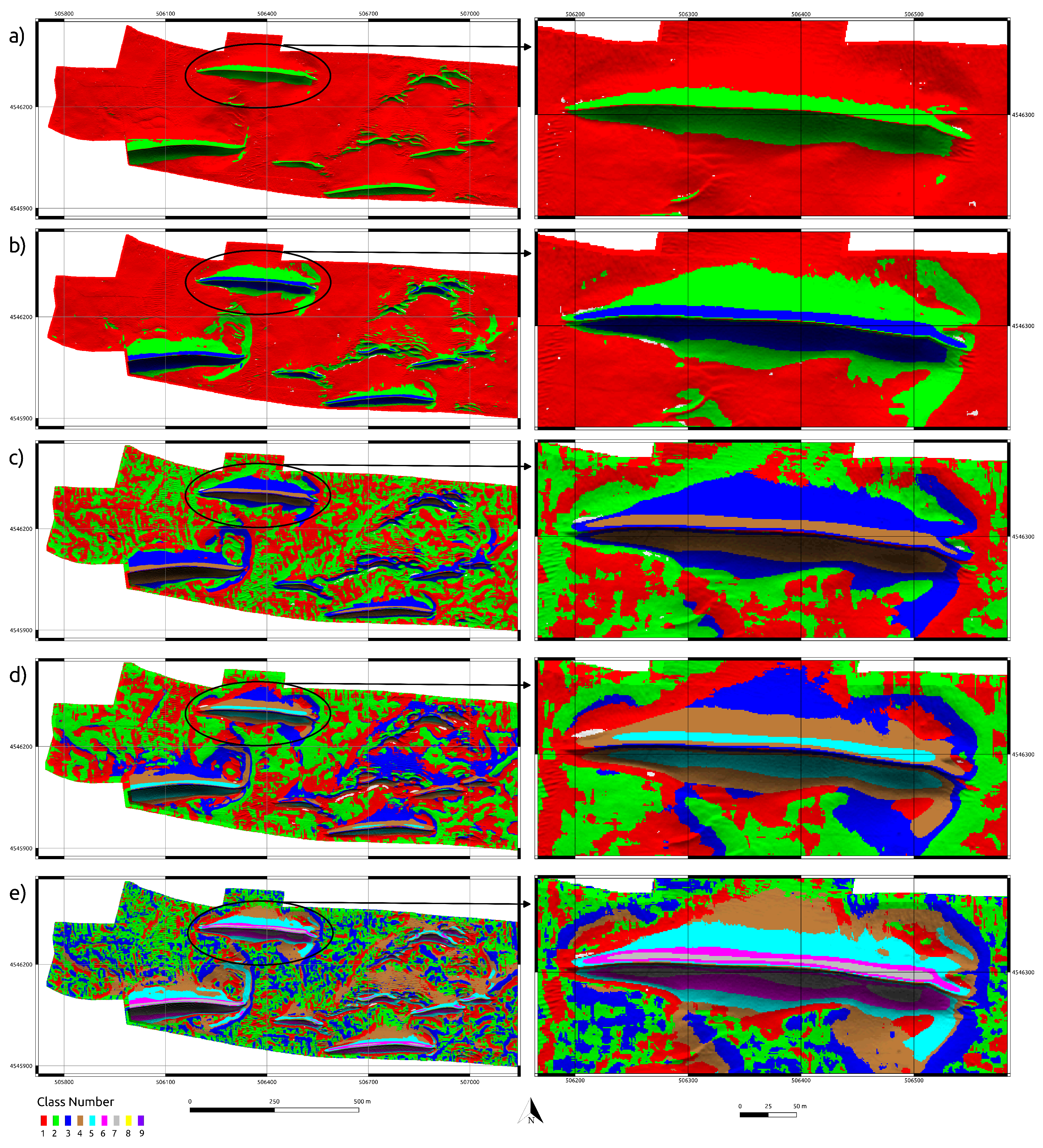
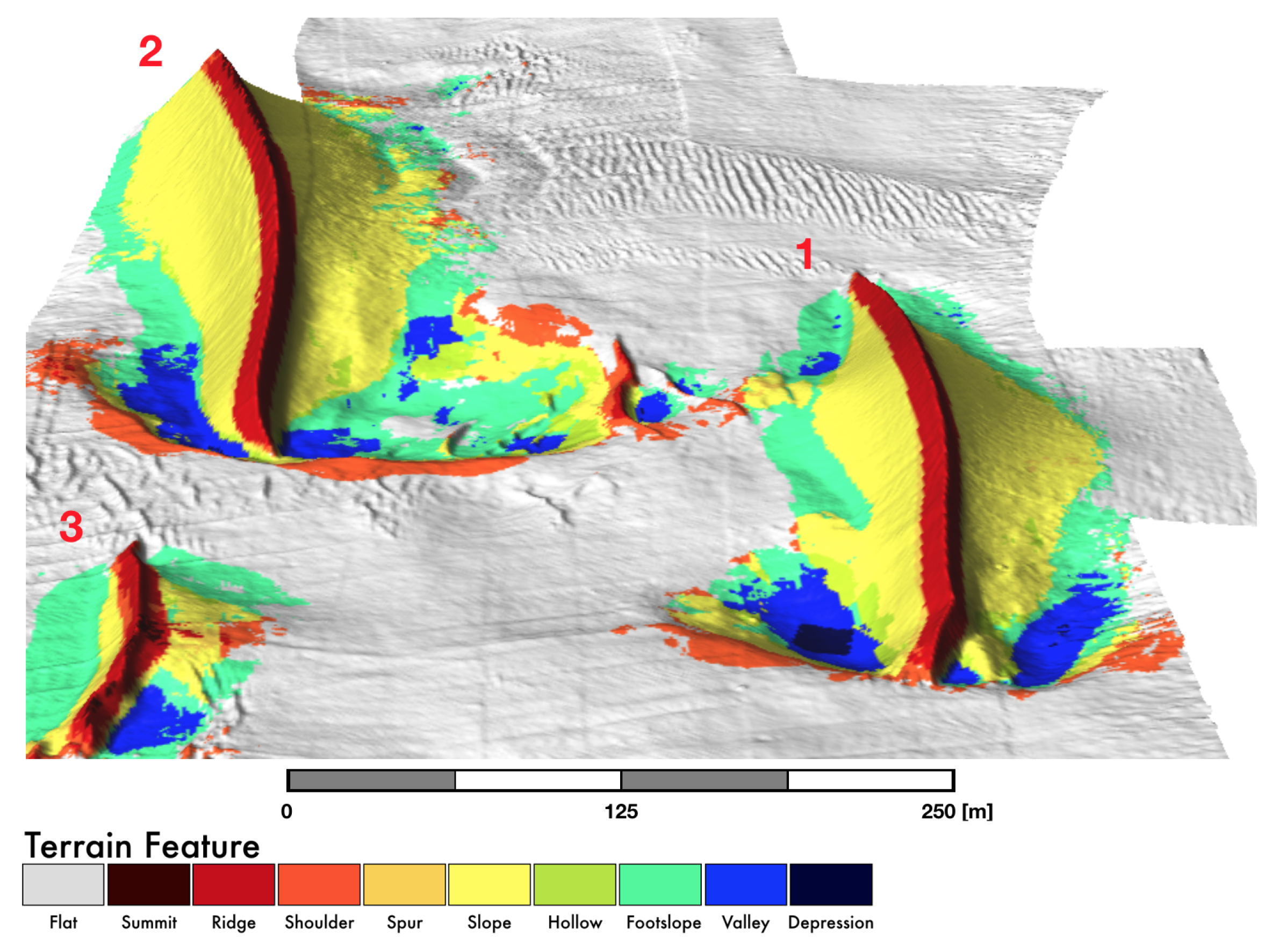
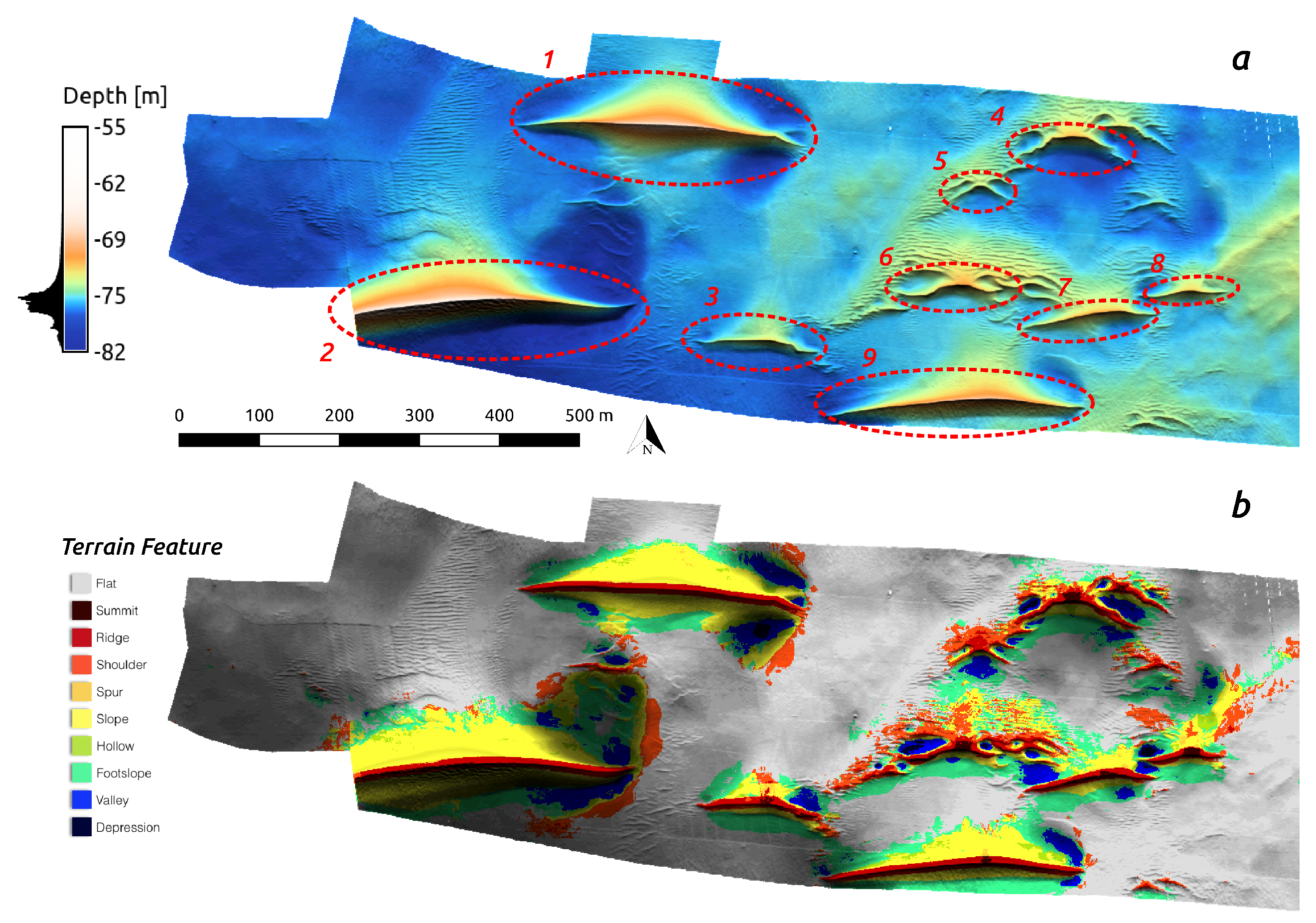
3.1. TFE Modeling
3.2. GRM Modeling
4. Discussion
- Set to null all the regions occupied by large scale bedforms and all the planar feature class.
- Vectorize channel and pass feature classes as vector lines.
- Split the vector lines into equidistant points.
- Determine the area occupied by ripples by using a kernel density estimator.
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DEM | Digital Elevation Model |
| DBM | Digital Batimetry |
| DTM | Digital Terrain Model |
| DTA | Digital Terrain Analysis |
| TPE | Terrain Parameters Extraction |
| TFE | Terrain Feature Extraction |
| MBES | Multibeam Echocouder |
| CTD | Conductivity, Temperature, Depth |
| USBL | Ultra Short Baseline |
| R/V | Research Vessel |
| IMU | Inertial Measurement Unit |
| GPS | Global Positioning System |
| GIS | Geographic Information System |
| GRASS | Geographic Resource Analysis Support System |
| SW | Sand Wave |
| SWC | Sand Wave Crest |
| CCOM | Center For Coastal and Ocean Mapping |
| WHOI | Woods Hole Oceanographic Institution |
| USGS | United States Geological Survey |
| NOAA | National Oceanic and Atmospheric Administration |
| NEMFS | North East Marine Fisheries Center |
| CMECS | Coastal and Marine Ecological Classification Standard |
References
- Kruckeberg, A.R. Geology and Plant Life: The Effects of Landforms and Rock Types on Plants; University of Washington Press: Seattle, WA, USA, 2002. [Google Scholar]
- Porder, S. Coevolution of life and landscapes. Proc. Natl. Acad. Sci. USA 2014, 111, 3207–3208. [Google Scholar] [CrossRef] [PubMed]
- Odum, E.P.; Kroodsma, R.L. Fundamentals of Ecology; Saunders: Philadelphia, PA, USA, 1976. [Google Scholar]
- Harris, P.T.; Baker, E.K. Seafloor Geomorphology as Benthic Habitat; Elsevier: Amsterdam, The Netherlands, 2011; pp. 3–22. [Google Scholar]
- McArthur, M.A.; Brooke, B.P.; Przeslawski, R.; Ryan, D.A.; Lucieer, V.L.; Nichol, S.; McCallum, A.W.; Mellin, C.; Cresswell, I.D.; Radke, L.C. On the use of abiotic surrogates to describe marine benthic biodiversity. Estuar. Coast. Shelf Sci. 2010, 88, 21–32. [Google Scholar] [CrossRef]
- Lecours, V.; Devillers, R.; Simms, A.E.; Lucieer, V.L.; Brown, C.J. Towards a framework for terrain attribute selection in environmental studies. Environ. Model. Softw. 2017, 89, 19–30. [Google Scholar] [CrossRef]
- Che Hasan, R.; Ierodiaconou, D.; Laurenson, L.; Schimel, A. Integrating Multibeam Backscatter Angular Response, Mosaic and Bathymetry Data for Benthic Habitat Mapping. PLoS ONE 2014, 9, e97339. [Google Scholar] [CrossRef] [PubMed]
- Brown, C.J.; Smith, S.J.; Lawton, P.; Anderson, J.T. Benthic habitat mapping: A review of progress towards improved understanding of the spatial ecology of the seafloor using acoustic techniques. Estuar. Coast. Shelf Sci. 2011, 92, 502–520. [Google Scholar] [CrossRef]
- Thomas, D.S.G. The Dictionary of Physical Geography, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Evans, I.S. An integrated system of terrain analysis and slope mapping. Z. Geomorphol. Suppl. 1980, 36, 274–295. [Google Scholar]
- Lillesand, T.M.; Kiefer, R.W. Remote Sensing and Image Interpretation; John Wiley & Sons: New York, NY, USA, 1997. [Google Scholar]
- Zhou, Q.; Lees, B.; Tang, G. Advances in Digital Terrain Analysis; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- A-Xing, Z.; Burt, J.E.; Smith, M.; Rongxun, W.; Jing, G. The Impact of Neighborhood Size on Terrain Derivatives and Digital Soil Mapping. In Advances in Digital Terrain Analysis. Lecture Notes in Geoinformation and Cartography; Springer: Berlin/Heidelberg, Germany, 2008; pp. 333–348. [Google Scholar]
- Marine and Coastal Spatial Data Subcommittee Federal Geographic Data Committee. Coastal and Marine Ecological Classification Standard; Federal Geographic Data Committee: Reston, VA, USA, 2012.
- Todd, B.J.; Valentine, P.C. Large submarine sand features and gravel lag sub-strates on Georges Bank, Gulf of Maine. In Seafloor Geomorphology as Benthic Habitat: GeoHab Atlas of Seafloor Geomorphic Features and Benthic Habitats; Elsevier: Amsterdam, The Netherlands, 2011; (Chapter 15). [Google Scholar]
- Changheng, C.; Beardsley, R.C. Cross-Frontal Water Exchange on Georges Bank: Some Results from an U.S. GLOBEC/Georges Bank Program Model Study. J. Oceanogr. 2002, 58, 403–420. [Google Scholar]
- Riley, G.A. Plankton studies. IV. Georges Bank. Bull. Binghampton Oceanogr. Coll. 1941, 7, 1–73. Available online: https://doi.org/10.1093/icesjms/16.3.392 (accessed on 10 November 2017).
- O’Reilly, J.E.; Evans-Zetlin, C.; Busch, D.A. Primary Production in Georges Bank; Backus, R.H., Ed.; MIT Press: Cambridge, MA, USA, 1987; pp. 220–233. [Google Scholar]
- Horne, E.P.W.; Loder, J.W.; Harrison, W.G.; Mohn, R.; Lewis, M.R.; Irwin, B.; Platt, T. Nitrate supply and demand at the Georges Bank tidal front. Scient. Mar. 1989, 53, 145–158. [Google Scholar]
- Wiebe, P.H.; Beardsley, R. Physical-biological interactions on Georges Bank and its environs. Deep Sea Res. Part II Top. Stud. Oceanogr. 1996, 43, 1437–1438. [Google Scholar] [CrossRef]
- Franks, P.J.S.; Chen, C. A 3–D prognostic numerical model study of the Georges Bank ecosystem. Part II: biological-physical model. Deep Sea Res. Part II Top. Stud. Oceanogr. 2001, 48, 457–482. [Google Scholar] [CrossRef]
- Cohen, E.B.; Wright, W.R. Primary Productivity on Georges Bank With an Explanation of Why It Is So High; National Marine Fisheries Service: Woods Hole, MA, USA, 1979. [Google Scholar]
- Valentine, P.C. Geological Survey Geologic Investigation Series Map I–2698; Version 1.0; USGS: Reston, VA, USA, 2002.
- Howland, J. Development of a Towed Survey System for Deployment by the Fishing Industry. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006. [Google Scholar]
- Philip, D. An Evaluation of USBL and SBL acoustic systems and the optimization of methods of calibration—Part 2. Hydrographyc J. 2003, 109, 10–20. [Google Scholar]
- Calder, B.R.; Mayer, L.A. Automatic processing of high-rate, high-density multibeam echosounder data. Geochem. Geophys. Geosyst. 2003, 4. [Google Scholar] [CrossRef]
- Wood and Snell; Technical Report EP-214; U.S. Army: Arlington, VA, USA, 1960.
- Wood, J. The Geomorphological Characterization of Digital Elevation Models. Ph.D. Thesis, University of Leicester, Leicester, UK, 1996. [Google Scholar]
- Dragut, L.; Eisank, C.; Strasser, T.; Blaschke, T. A Comparison of Methods to Incorporate Scale in Geomorphometry. In Proceedings of the Geomorphometry 2009, Zurich, Switzerland, 31 August–2 September 2009. [Google Scholar]
- GRASS Development Team. Geographic Resources Analysis Support System (GRASS) Software, Version 7.2. 2017. Available online: http://grass.osgeo.org (accessed on 10 November 2017).
- Stepinski, T.; Jasiewicz, J. Geomorphons—A new approach to classification of landforms. In Proceedings of the Geomorphometry 2011, Redlands, CA, USA, 30 May 2011; pp. 109–112. [Google Scholar]
- Jasiewicz, J. Geomorphons—A pattern recognition approach to classification and mapping of landforms. Geomorphology 2013, 182, 147–156. [Google Scholar] [CrossRef]
- Malamud, B.D.; Baas, A.C.W. Nine Considerations for Constructing and Running Geomorphological Models. Ref. Mod. Earth Syst. Environ. Sci. Treatise Geomorphol. 2014, 2, 6–28. [Google Scholar]
- Thorson, G. Some factors influencing the recruitment and establishment of marine benthic communities. Neth. J. Sea Res. 1966, 3, 267–293. [Google Scholar] [CrossRef]
- Derek, J.; Henrik, H. Encyclopedia of Planetary Landforms; Springer: New York, NY, USA, 2015; pp. 143–148. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Model A, B |
| Param Scale Window Operator | |
| Curvature Tolerance | |
| Exponent for Distance Weighting | |
| Vertical Scaling Factor | |
| Model B | |
| Nearest Neighbor Operator | |
| Number of Classes | |
| Minimum Cluster Size | |
| Number of Iteration | 200 |
| Model C | |
| Outer Search Radius | |
| Inner Search Radius Threshold | |
| Flatness Threshold | |
| Flatness Distance |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Stefano, M.; Mayer, L.A. An Automatic Procedure for the Quantitative Characterization of Submarine Bedforms. Geosciences 2018, 8, 28. https://doi.org/10.3390/geosciences8010028
Di Stefano M, Mayer LA. An Automatic Procedure for the Quantitative Characterization of Submarine Bedforms. Geosciences. 2018; 8(1):28. https://doi.org/10.3390/geosciences8010028
Chicago/Turabian StyleDi Stefano, Massimo, and Larry Alan Mayer. 2018. "An Automatic Procedure for the Quantitative Characterization of Submarine Bedforms" Geosciences 8, no. 1: 28. https://doi.org/10.3390/geosciences8010028
APA StyleDi Stefano, M., & Mayer, L. A. (2018). An Automatic Procedure for the Quantitative Characterization of Submarine Bedforms. Geosciences, 8(1), 28. https://doi.org/10.3390/geosciences8010028