

Hazard and Risk-Based Tsunami Early Warning Algorithms for Ocean Bottom Sensor S-Net System in Tohoku, Japan, Using Sequential Multiple Linear Regression



Abstract
:1. Introduction
2. Tsunami Simulation Data and Forecasting Methods
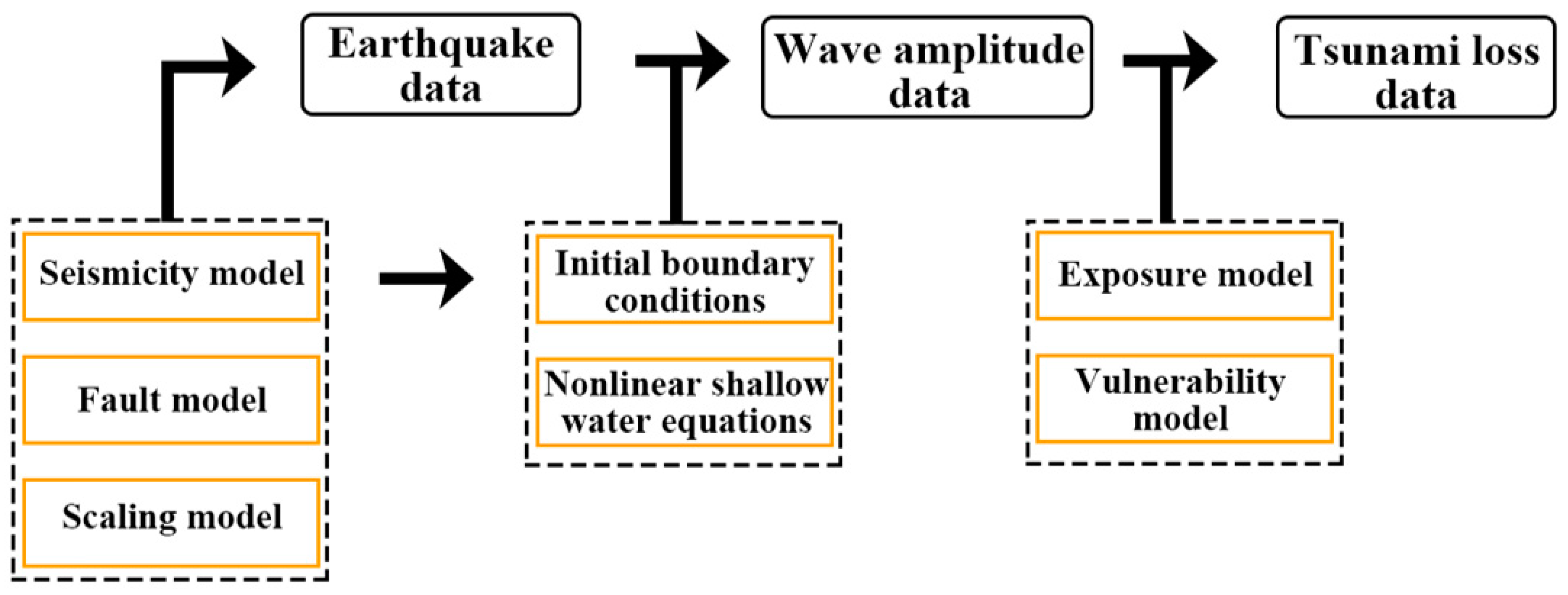
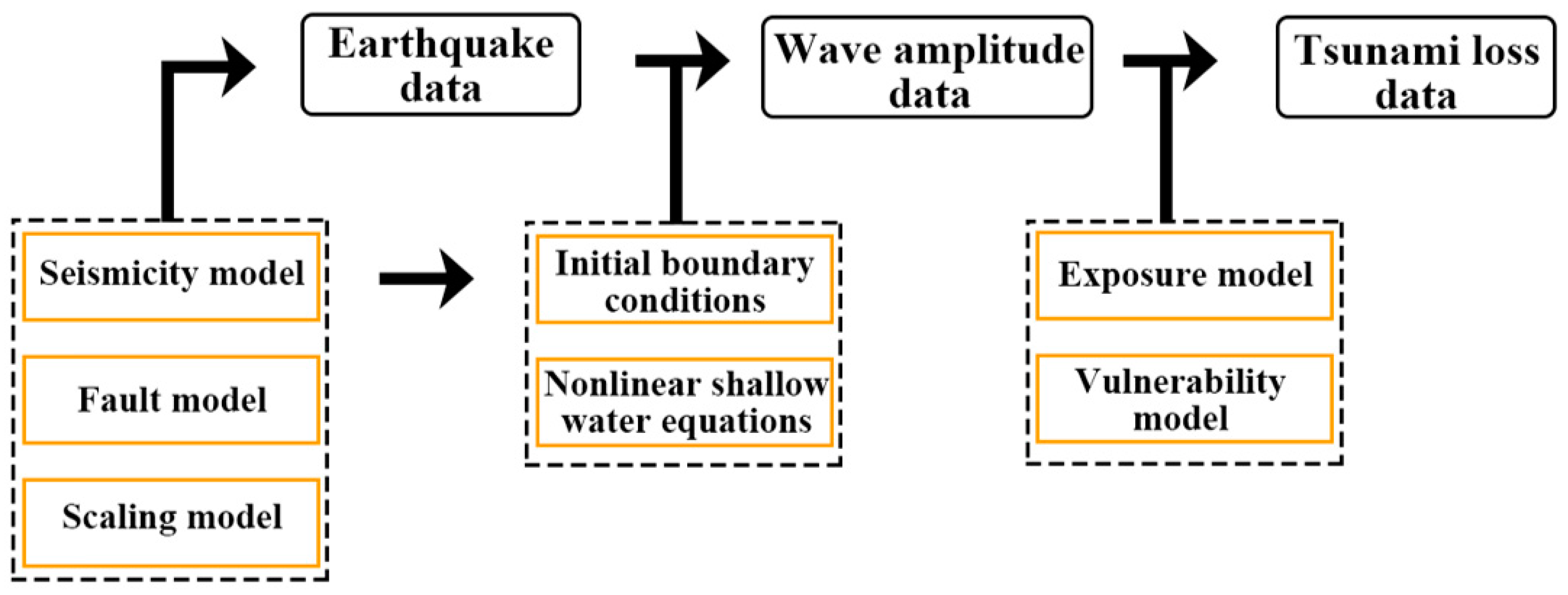
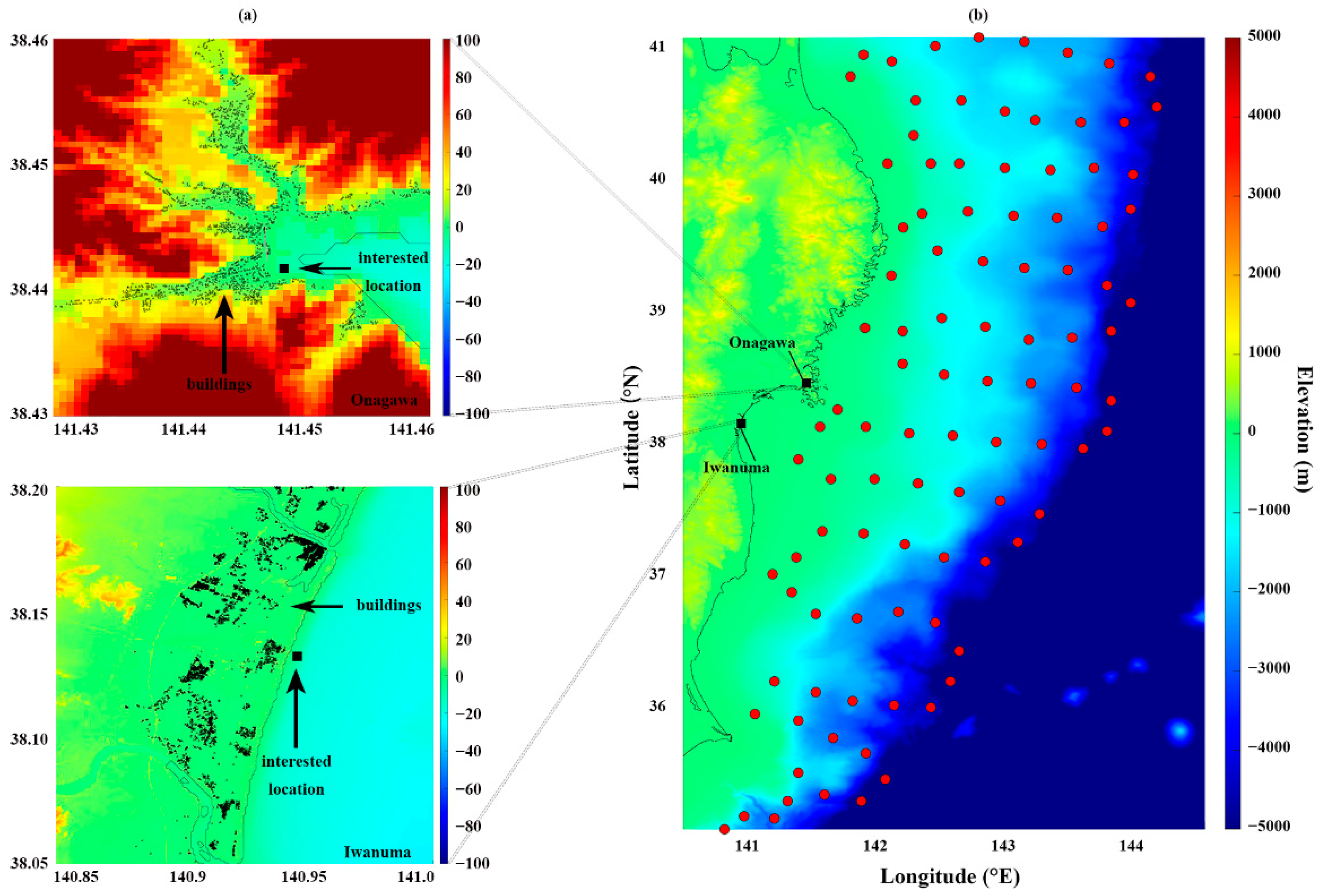
2.1. Tsunami Simulation Data
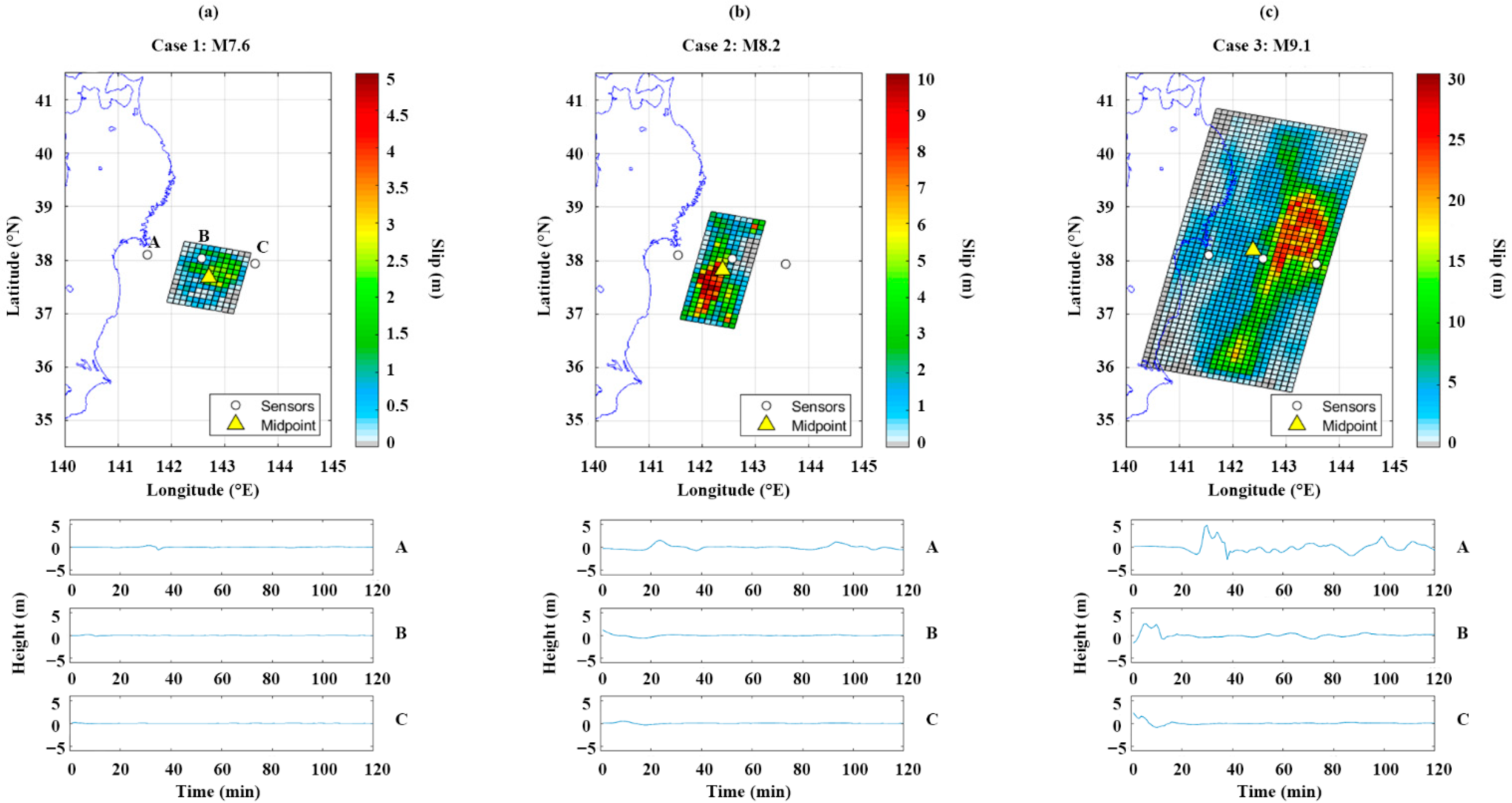
2.1.1. Stochastic Earthquakes
2.1.2. Wave Amplitude
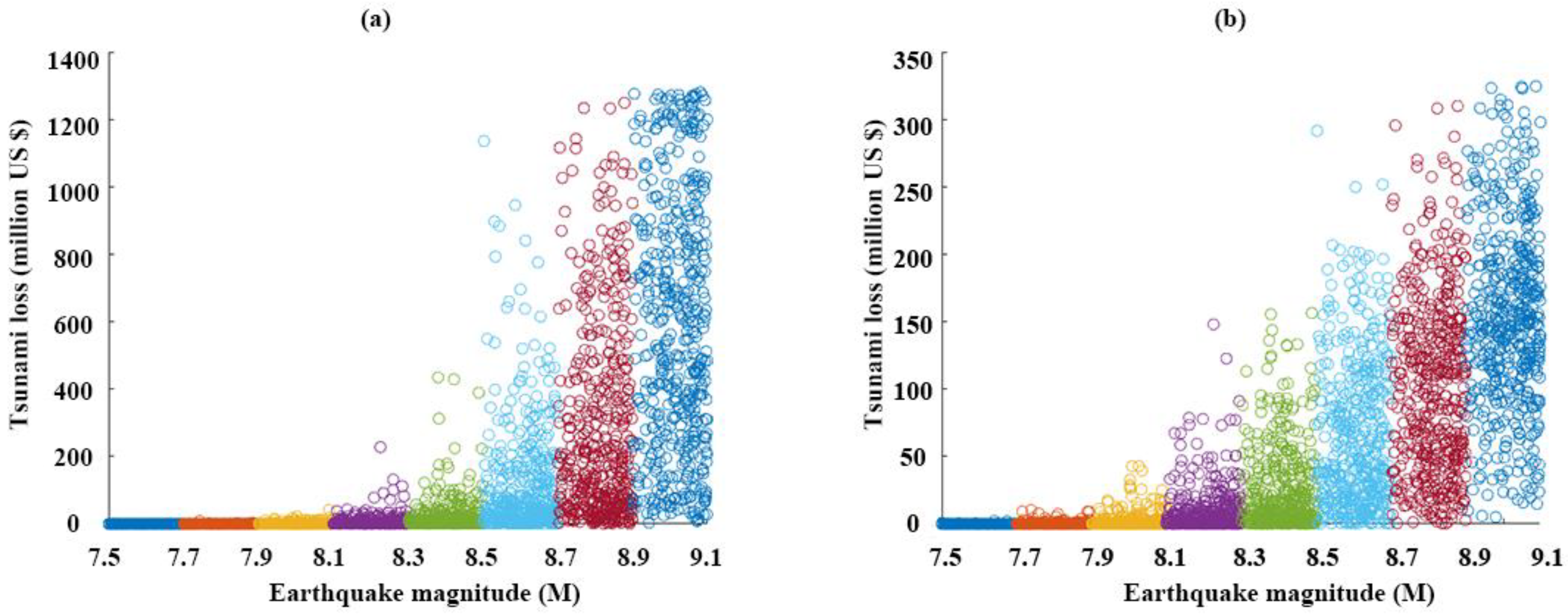
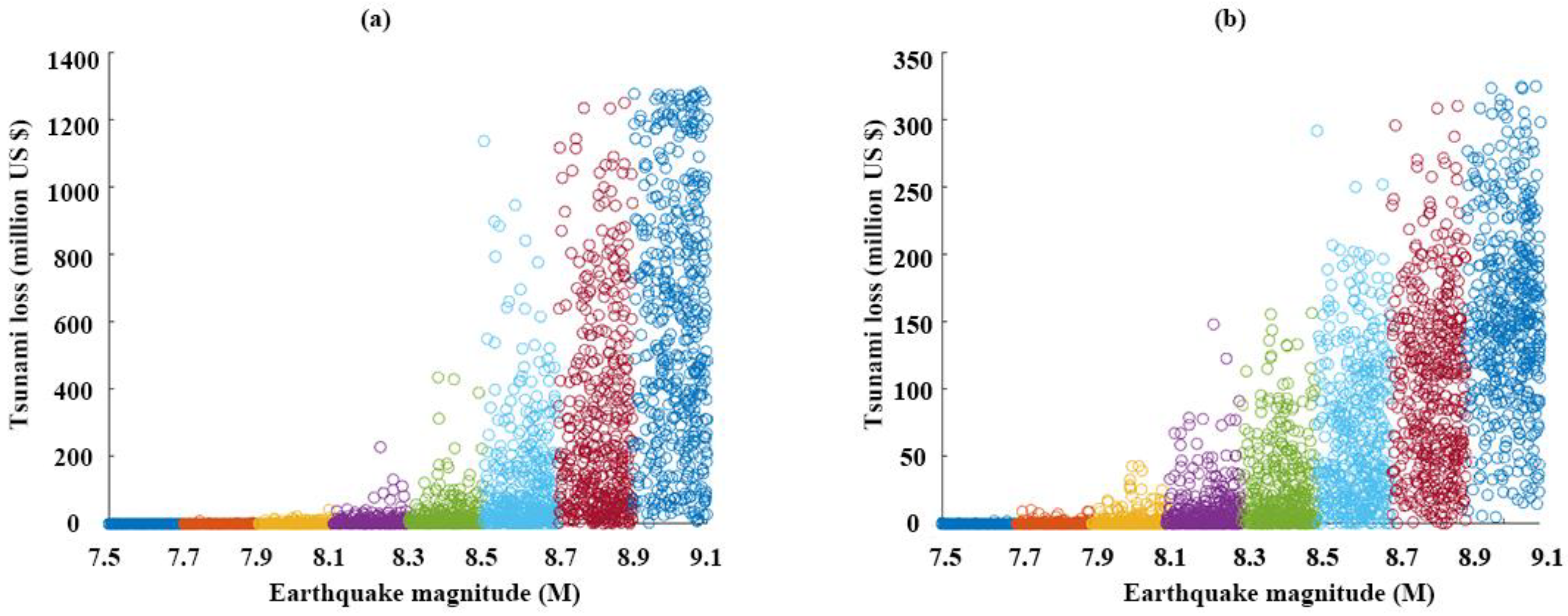
2.1.3. Tsunami Loss
2.2. Methods
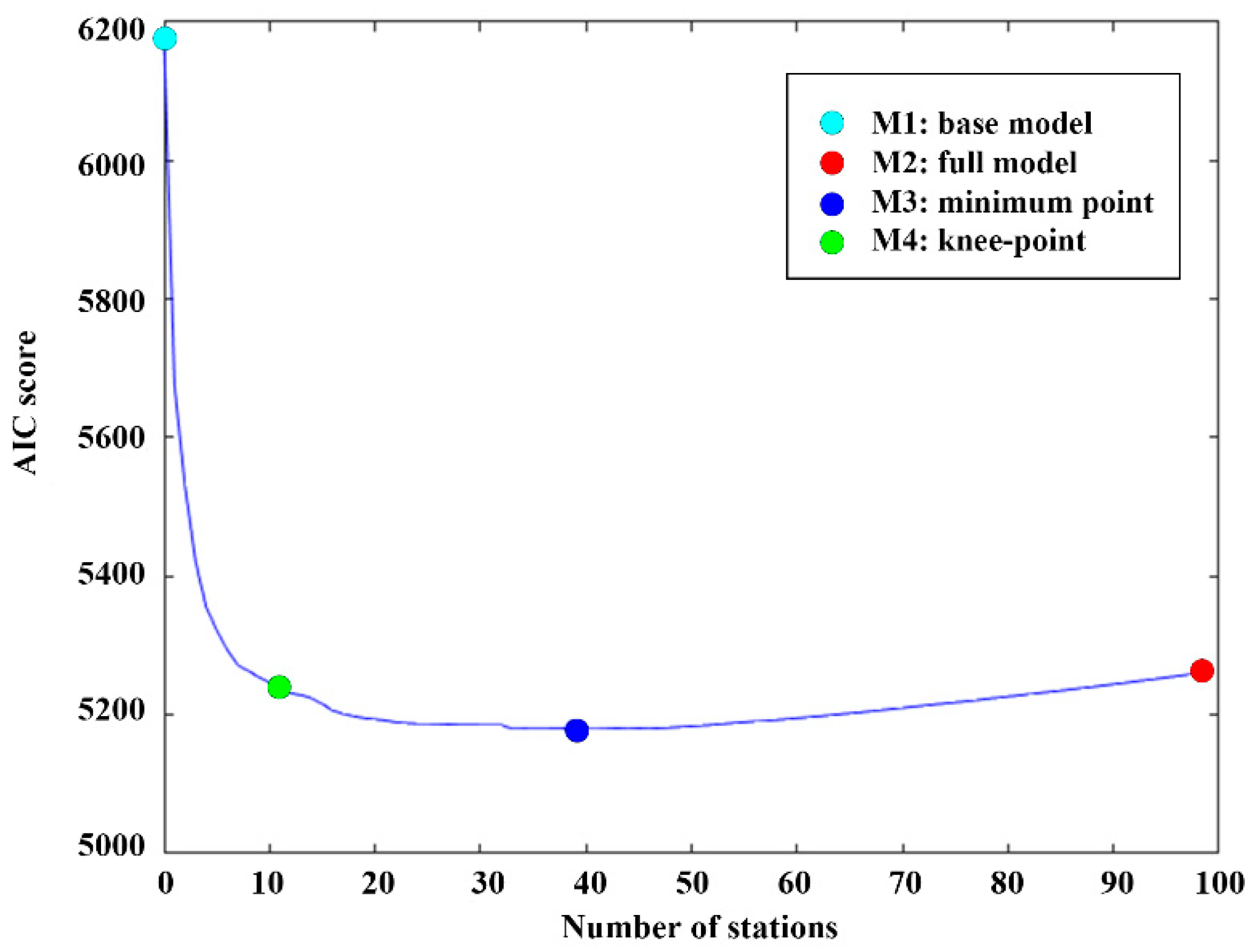
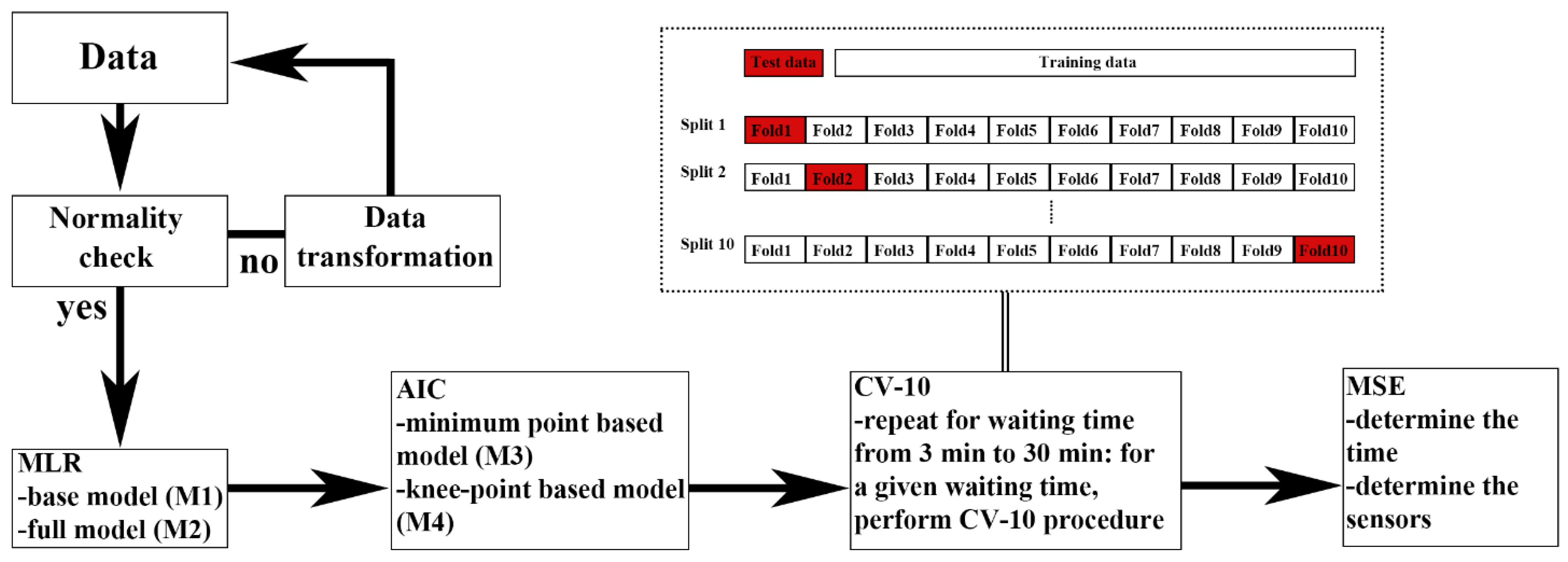
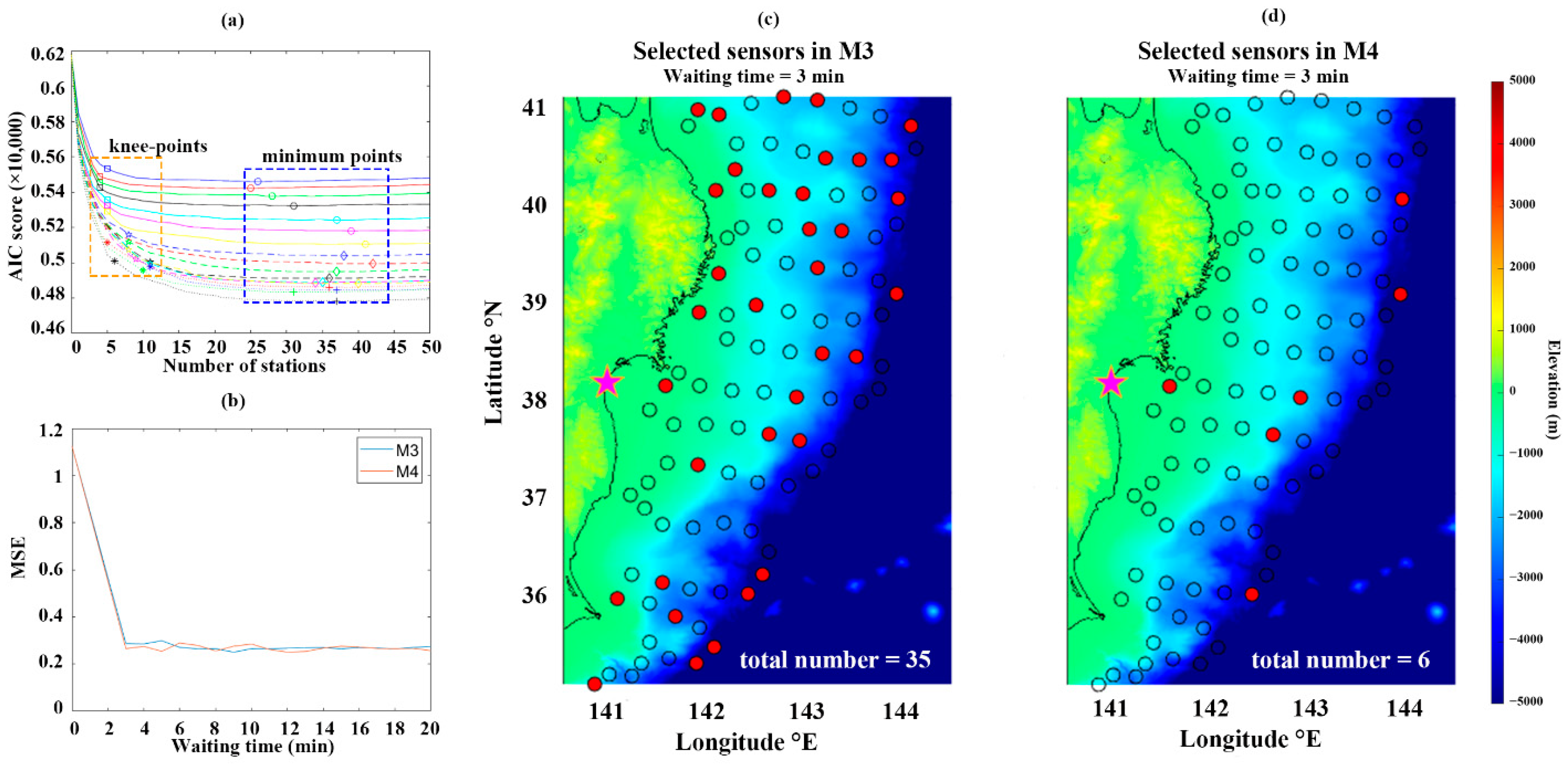
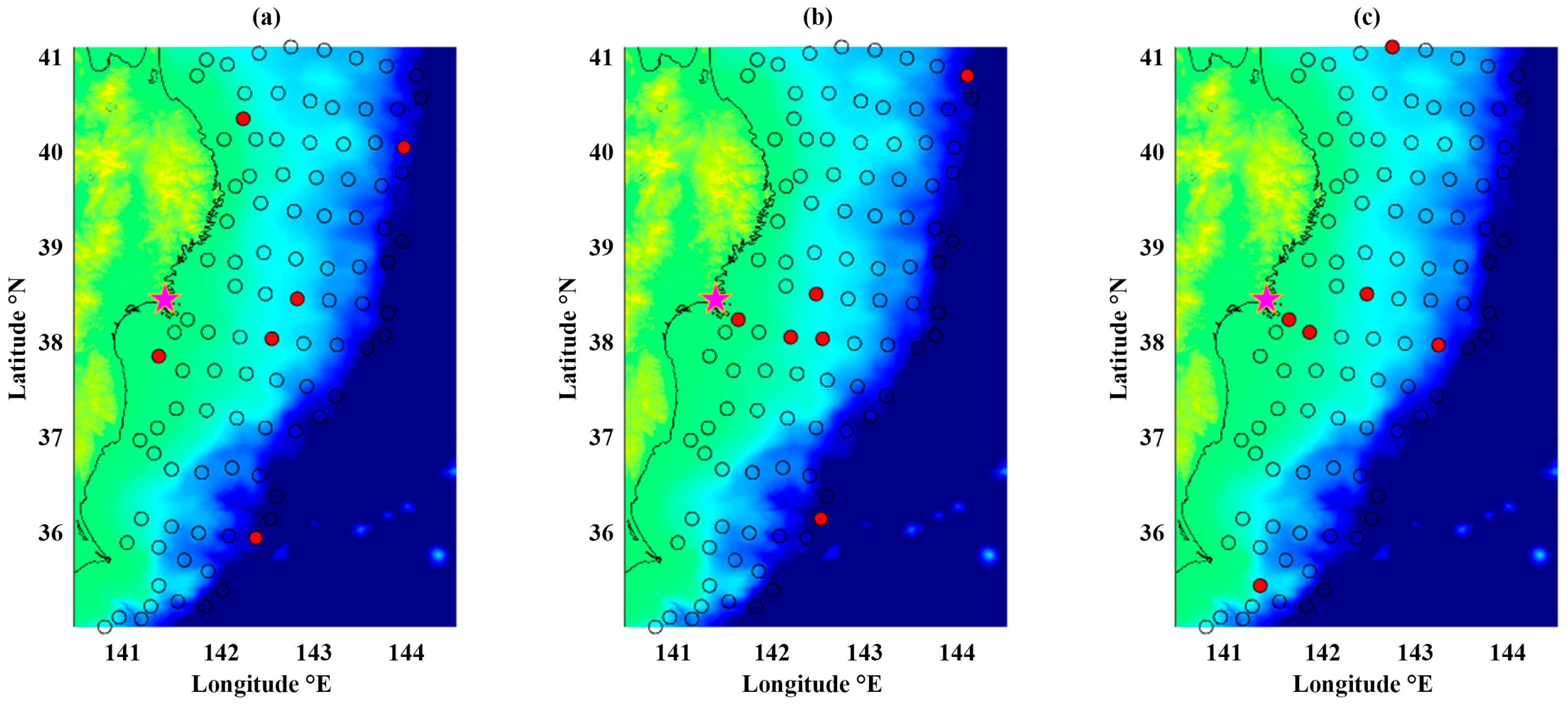
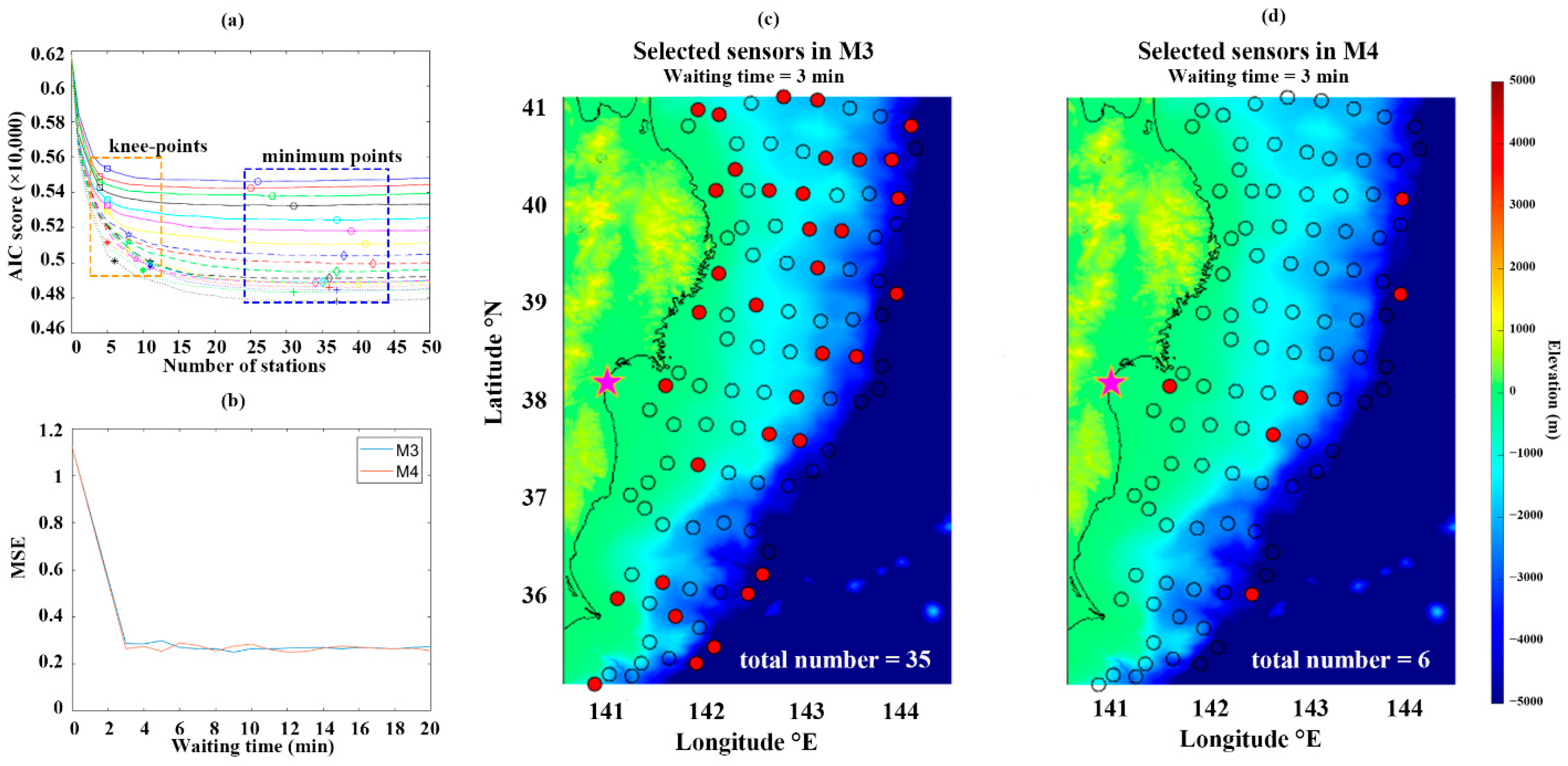
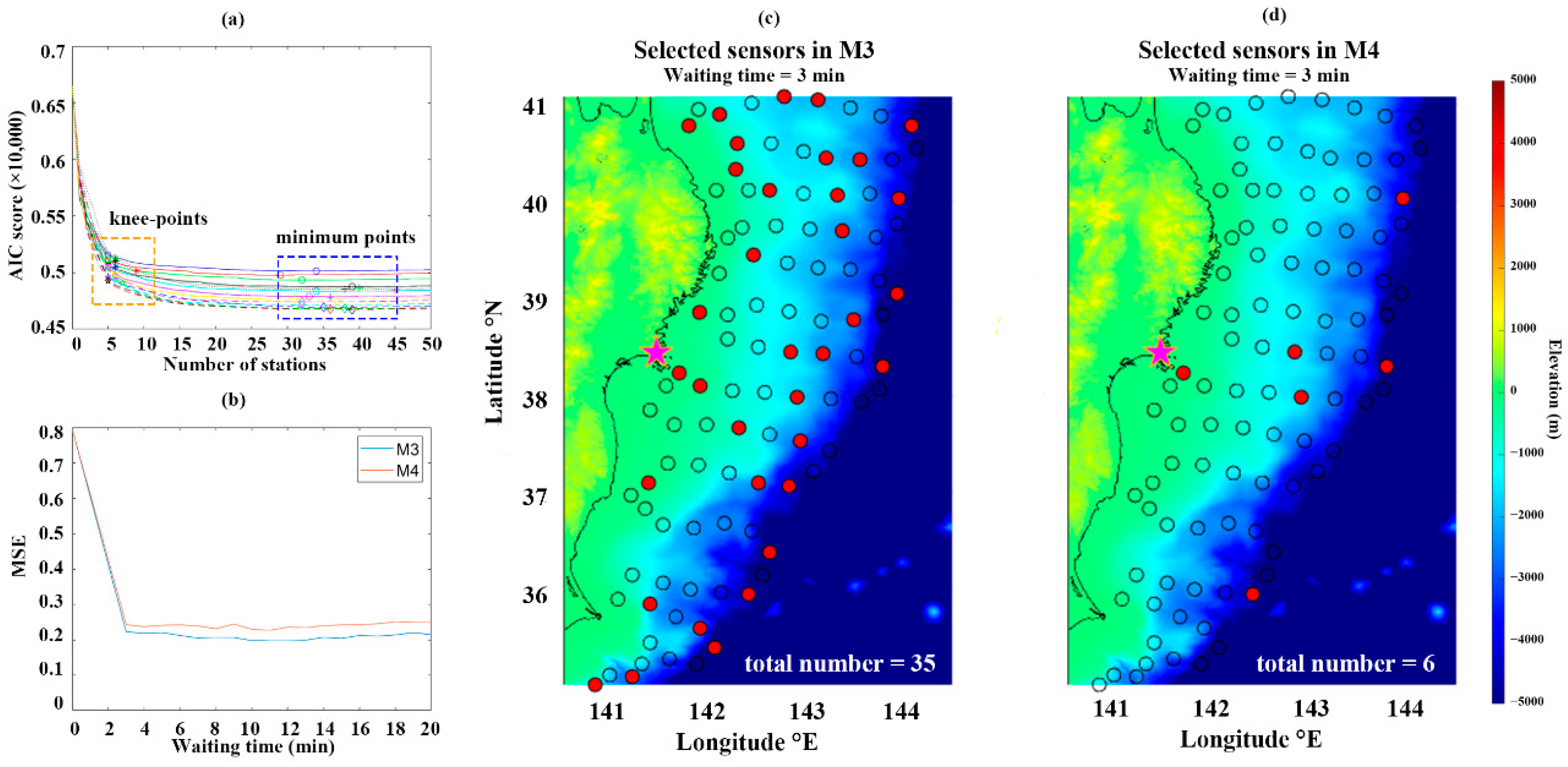
2.2.1. Multiple Linear Regression with AIC Forward Selection and Knee-Point
2.2.2. Comparison of Model Performances
3. Results
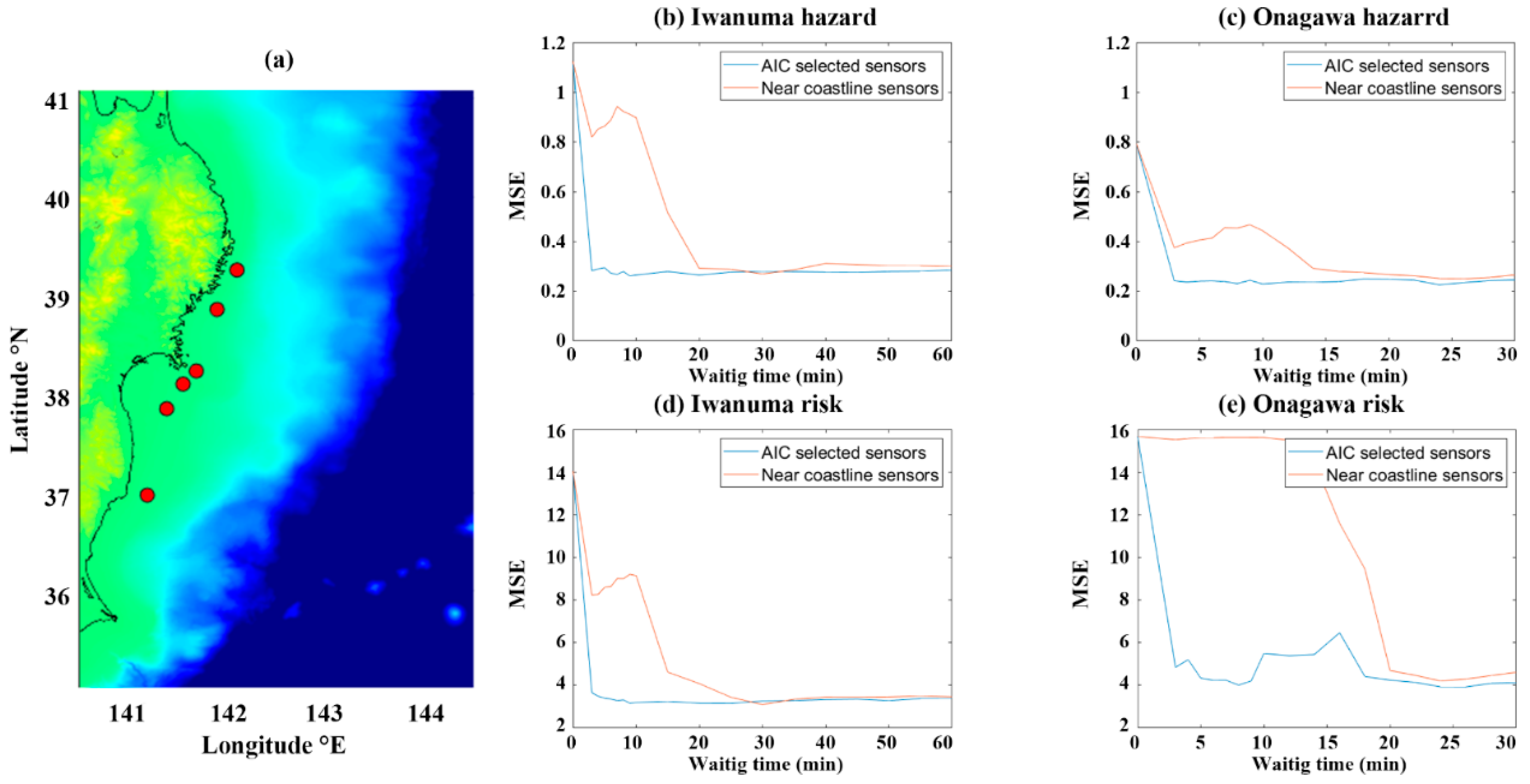
3.1. Hazard-Based Results
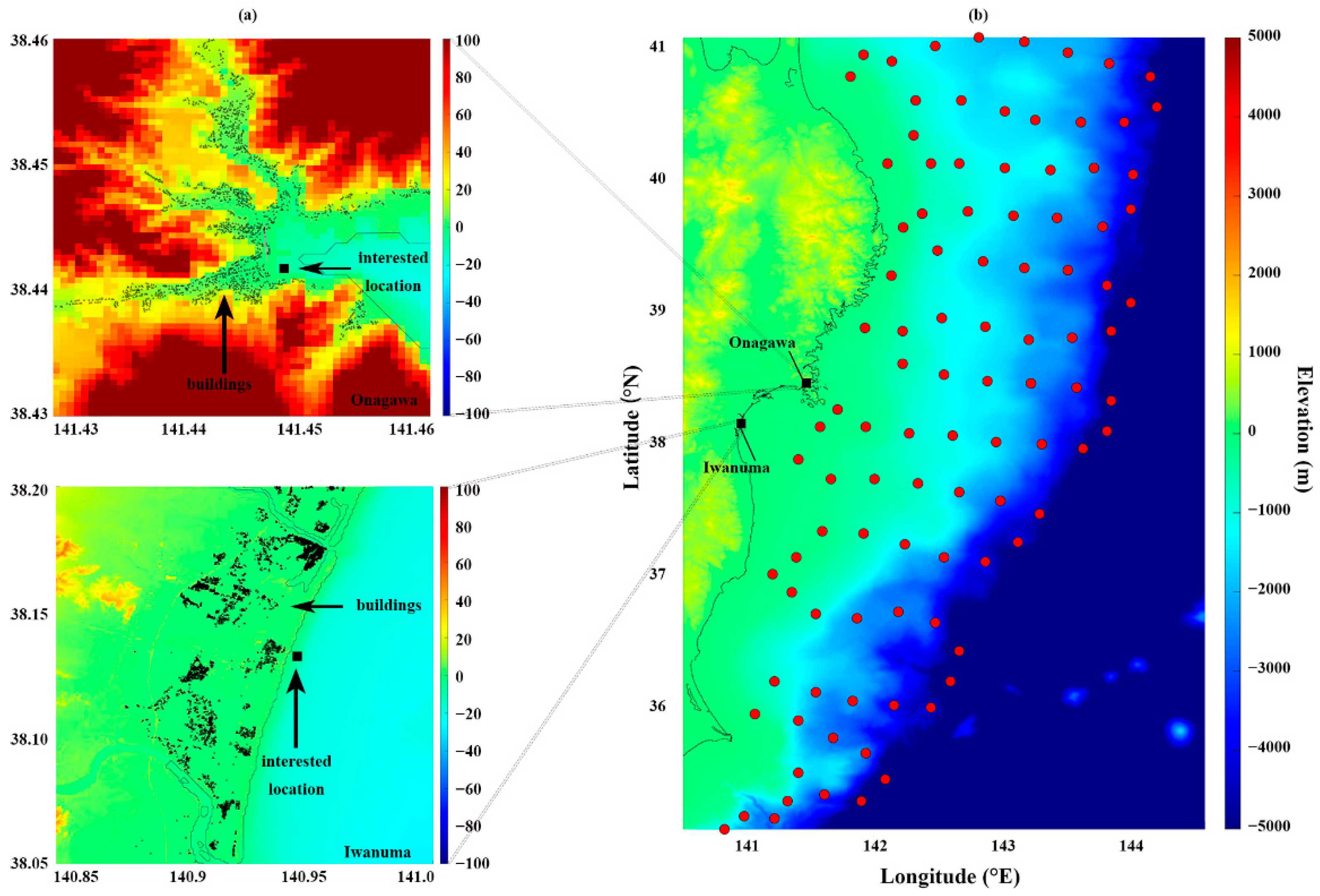
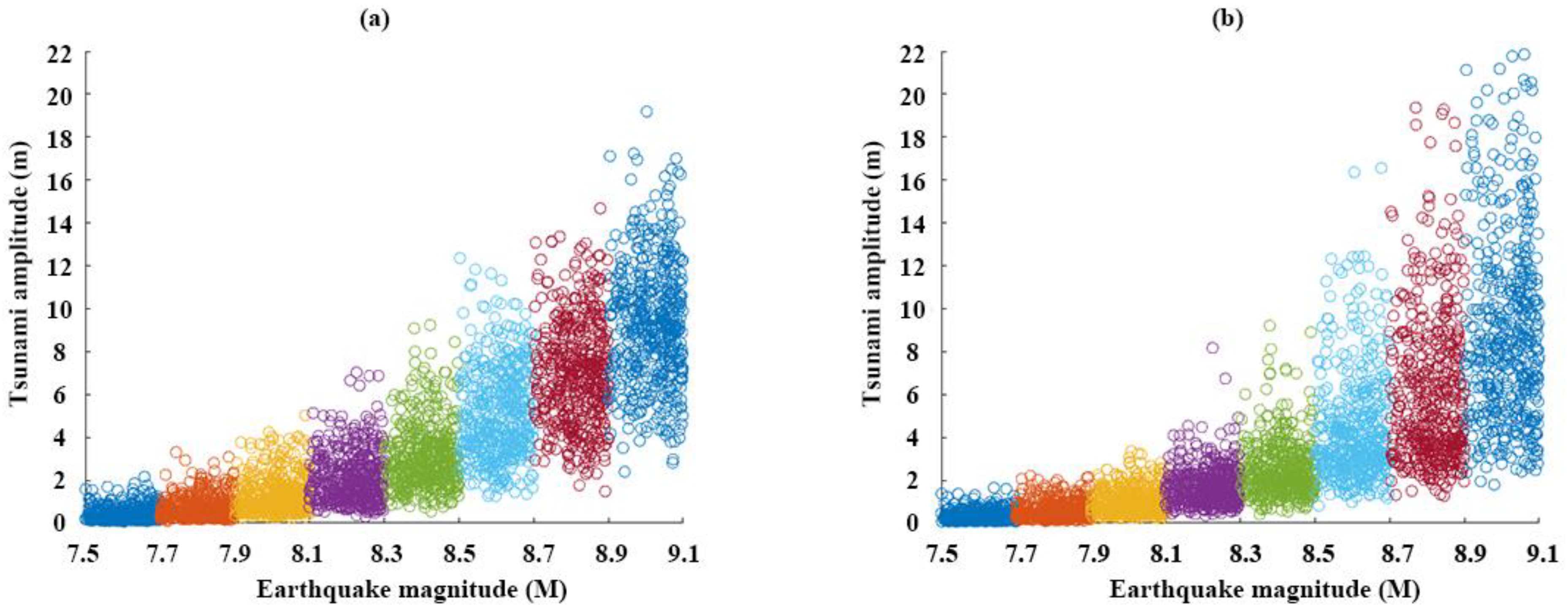
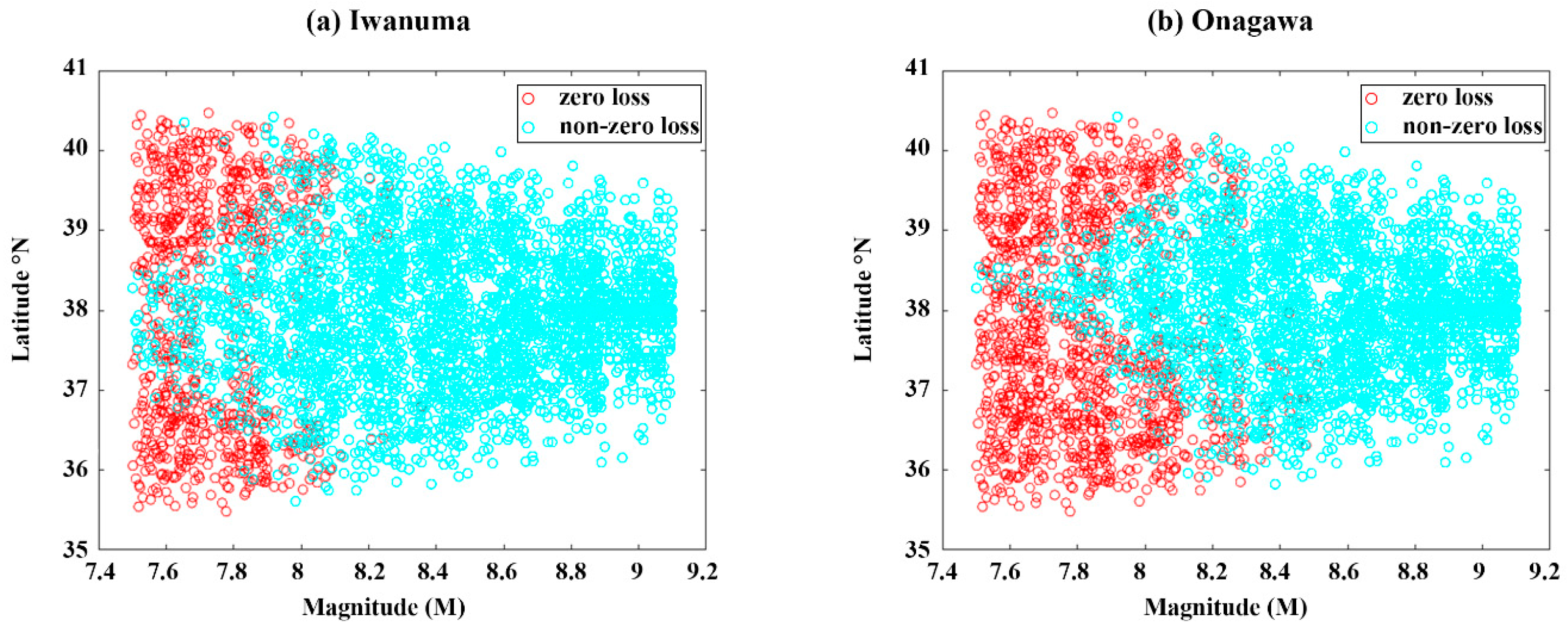
3.1.1. Maximum On-Shore Amplitude for Iwanuma
3.1.2. Maximum On-Shore Amplitude for Onagawa
3.2. Risk-Based Results
3.2.1. Tsunami Loss for Iwanuma
3.2.2. Tsunami Loss for Onagawa
4. Discussion
4.1. Challenges in Practical Applications
4.2. Limitations and Future Improvements
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mori, N.; Takahashi, T. Nationwide Post Event Survey and Analysis of the 2011 Tohoku Earthquake Tsunami. Coast. Eng. J. 2012, 54, 1250001-1–1250001-27. [Google Scholar] [CrossRef]
- Mimura, N.; Yasuhara, K.; Kawagoe, S.; Yokoki, H.; Kazama, S. Damage from the Great East Japan Earthquake and Tsunami—A Quick Report. Mitig. Adapt. Strateg. Glob. Change 2011, 16, 803–818. [Google Scholar] [CrossRef]
- Fire and Disaster Management Agency. 2011 Off the Pacific Coast of Tohoku Earthquake (162nd report) in Japanese. 2022. Available online: https://www.fdma.go.jp/disaster/higashinihon/items/162.pdf (accessed on 1 September 2022).
- Emergency Disaster Response Headquarters. 2011 Off the Pacific Coast of Tohoku Earthquake (Great East Japan Earthquake) in Japanese. 2011. Available online: kantei.go.jp/saigai/pdf/201104271700jisin.pdf (accessed on 1 September 2022).
- Maeda, T.; Obara, K.; Shinohara, M.; Kanazawa, T.; Uehira, K. Successive Estimation of a Tsunami Wavefield without Earthquake Source Data: A Data Assimilation Approach toward Real-time Tsunami Forecasting. Geophys. Res. Lett. 2015, 42, 7923–7932. [Google Scholar] [CrossRef]
- Gusman, A.R.; Sheehan, A.F.; Satake, K.; Heidarzadeh, M.; Mulia, I.E.; Maeda, T. Tsunami Data Assimilation of Cascadia Seafloor Pressure Gauge Records from the 2012 Haida Gwaii Earthquake. Geophys. Res. Lett. 2016, 8, 4189–4196. [Google Scholar] [CrossRef]
- Dzvonkovskaya, A.; Petersen, L.; Helzel, T.; Kniephoff, M. High-frequency Ocean Radar Support for Tsunami Early Warning Systems. Geosci. Lett. 2018, 5, 29. [Google Scholar] [CrossRef]
- Harig, S.; Immerz, A.; Weniza; Griffin, J.; Weber, B.; Babeyko, A.; Rakowsky, N.; Hartanto, D.; Nurokhim, A.; Handayani, T.; et al. The Tsunami Scenario Database of the Indonesia Tsunami Early Warning System (InaTEWS): Evolution of the Coverage and the Involved Modeling Approaches. Pure Appl. Geophys. 2019, 177, 1379–1401. [Google Scholar] [CrossRef]
- Esposito, M.; Palma, L.; Belli, A.; Sabbatini, L.; Pierleoni, P. Recent Advances in Internet of Things Solutions for Early Warning Systems: A Review. Sensors 2022, 22, 2124. [Google Scholar] [CrossRef]
- Hosiba, M.; Ozaki, T. Earthquake Early Warning and Tsunami Warning of JMA for the 2011 off the Pacific Coast of Tohoku Earthquake. Zisin (J. Seismol. Soc. Japan. 2nd Ser.) 2012, 64, 155–168. [Google Scholar]
- Srinivasa Kumar, T.; Manneela, S. A Review of the Progress, Challenges and Future Trends in Tsunami Early Warning Systems. J. Geol. Soc. India 2021, 97, 1533–1544. [Google Scholar] [CrossRef]
- Sato, M.; Ishikawa, T.; Ujihara, N.; Yoshida, S.; Fujita, M.; Mochizuki, M.; Asada, A. Displacement above the Hypocenter of the 2011 Tohoku-Oki Earthquake. Science 2011, 332, 1395. [Google Scholar] [CrossRef]
- Kanazawa, T. Japan Trench Earthquake and Tsunami Monitoring Network of Cable-linked 150 Ocean Bottom Observatories and its Impact to Earth Disaster Science. In Proceedings of the 2013 IEEE International Underwater Technology Symposium (UT), Tokyo, Japan, 5–8 March 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Uehira, K.; Mochizuki, M.; Kanazawa, T.; Shiomi, K.; Kunugi, T.; Aoi, S.; Matsumoto, T.; Sekiguchi, S.; Yamamoto, N.; Takahashi, N.; et al. S-net project: Construction of Large-scale Seismic and Tsunami Observation System on Seafloor along the Japan Trench. In Proceedings of the 20th EGU General Assembly, EGU2018, Vienna, Austria, 4–13 April 2018; p. 12000. [Google Scholar]
- Goda, K.; Mai, P.M.; Yasuda, T.; Mori, N. Sensitivity of Tsunami Wave Profiles and Inundation Simulations to Earthquake Slip and Fault Geometry for the 2011 Tohoku Earthquake. Earth Planets Space 2014, 66, 105. [Google Scholar] [CrossRef]
- Goda, K.; Yasuda, T.; Mori, N.; Maruyama, T. New Scaling Relationships of Earthquake Source Parameters for Stochastic Tsunami Simulation. Coast. Eng. J. 2016, 58, 1650010–1650011. [Google Scholar] [CrossRef]
- Mai, P.M.; Thingbaijam, K.K.S. SRCMOD: An Online Database of Finite-Fault Rupture Models. Seismol. Res. Lett. 2014, 85, 1348–1357. [Google Scholar] [CrossRef]
- Goda, K. Multi-hazard Parametric Catastrophe Bond Trigger Design for Subduction Earthquakes and Tsunamis. Earthq. Spectra 2021, 37, 1827–1848. [Google Scholar] [CrossRef]
- Akaike, H. Maximum Likelihood Identification of Gaussian Autoregressive Moving Average Models. Biometrika 1973, 60, 255–265. [Google Scholar] [CrossRef]
- Thomas, C.; Sheldon, B. The Knee of a CurveUseful Clue but Incomplete Support. Mil. Oper. Res. 1999, 4, 17–24. [Google Scholar] [CrossRef]
- Lopatka, A. Deploying Seismometers where They’re Needed Most: Underwater. Phys. Today 2019. [Google Scholar] [CrossRef]
- Angove, M.; Arcas, D.; Bailey, R.; Carrasco, P.; Coetzee, D.; Fry, B.; Gledhill, K.; Harada, S.; von Hillebrandt-Andrade, C.; Kong, L.; et al. Ocean Observations Required to Minimize Uncertainty in Global Tsunami Forecasts, Warnings, and Emergency Response. Front. Mar. Sci. 2019, 6. [Google Scholar] [CrossRef]
- Fraser, S.; Raby, A.; Pomonis, A.; Goda, K.; Chian, S.C.; Macabuag, J.; Offord, M.; Saito, K.; Sammonds, P. Tsunami Damage to Coastal Defences and Buildings in the March 11th 2011 M w 9.0 Great East Japan Earthquake and Tsunami. Bull. Earthq. Eng. 2012, 11, 205–239. [Google Scholar] [CrossRef]
- Shibayama, T.; Esteban, M.; Nistor, I.; Takagi, H.; Thao, N.D.; Matsumaru, R.; Mikami, T.; Aranguiz, R.; Jayaratne, R.; Ohira, K. Classification of Tsunami and Evacuation Areas. Nat. Hazards 2013, 67, 365–386. [Google Scholar] [CrossRef]
- Hadihardaja, I.K.; Latief, H.; Mulia, I.E. Decision Support System for Predicting Tsunami Characteristics along Coastline Areas based on Database Modelling Development. J. Hydroinformatics 2010, 13, 96–109. [Google Scholar] [CrossRef]
- Witter, R.C.; Zhang, Y.; Wang, K.; Priest, G.R.; Goldfinger, C.; Stimely, L.L.; English, J.T.; Ferro, P.A. Simulating Tsunami Inundation at Bandon, Coos County, Oregon, Using Hypothetical Cascadia and Alaska Earthquake Scenarios. Or. Dep. Geol. Miner. Ind. Spec. Pap. 2011, 43, 57. [Google Scholar]
- Yeh, H.; Mason, H. Sediment Response to Tsunami Loading: Mechanisms and Estimates. Géotechnique 2014, 64, 131–143. [Google Scholar] [CrossRef]
- Wang, Y.; Heidarzadeh, M.; Satake, K.; Mulia, I.E.; Yamada, M. A Tsunami Warning System Based on Offshore Bottom Pressure Gauges and Data Assimilation for Crete Island in the Eastern Mediterranean Basin. J. Geophys. Res. Solid Earth 2020, 125. [Google Scholar] [CrossRef]
- An, C.; Liu, H.; Ren, Z.; Yuan, Y. Prediction of Tsunami Waves by Uniform Slip Models. J. Geophys. Res. Ocean. 2018, 123, 8366–8382. [Google Scholar] [CrossRef]
- Wang, Y.; Satake, K. Real-Time Tsunami Data Assimilation of S-Net Pressure Gauge Records during the 2016 Fukushima Earthquake. Seismol. Res. Lett. 2021, 92, 2145–2155. [Google Scholar] [CrossRef]
- Satake, K.; Fujii, Y.; Harada, T.; Namegaya, Y. Time and Space Distribution of Coseismic Slip of the 2011 Tohoku Earthquake as Inferred from Tsunami Waveform Data. Bull. Seismol. Soc. Am. 2013, 103, 1473–1492. [Google Scholar] [CrossRef]
- Goto, C.; Ogawa, Y.; Shuto, N.; Imamura, F. Numerical Method of Tsunami Simulation with the Leap-frog Scheme. IOC Manual UNESCO 1997, 35, 130. [Google Scholar]
- Okada, Y. Surface Deformation due to Shear and Tensile Faults in a Half-space. Bull. Seismol. Soc. Am. 1985, 75, 1135–1154. [Google Scholar] [CrossRef]
- Tanioka, Y.; Satake, K. Tsunami Generation by Horizontal Displacement of Ocean Bottom. Geophys. Res. Lett. 1996, 23, 861–864. [Google Scholar] [CrossRef]
- Japan Society of Civil Engineers. Tsunami Assessment Method for Nuclear Power Plants in Japan. 2002. Available online: jsce.or.jp/committee/ceofnp/Tsunami/eng/JSCE_Tsunami_060519.pdf (accessed on 1 September 2022).
- De Risi, R.; Goda, K.; Yasuda, T.; Mori, N. Is Flow Velocity Important in Tsunami Empirical Fragility Modeling? Earth-Sci. Rev. 2017, 166, 64–82. [Google Scholar] [CrossRef]
- Gusiakov, V.K. Relationship of Tsunami Intensity to Source Earthquake Magnitude as Retrieved from Historical Data. Pure Appl. Geophys. 2011, 168, 2033–2041. [Google Scholar] [CrossRef]
- Blewitt, G.; Kreemer, C.; Hammond, W.C.; Plag, H.; Stein, S.; Okal, E. Rapid Determination of Earthquake Magnitude Using GPS for Tsunami Warning Systems. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Zou, J.; Ji, C.; Yang, S.; Zhang, Y.; Zheng, J.; Li, K. A Knee-point-based Evolutionary Algorithm Using Weighted Subpopulation for Many-objective Optimization. Swarm Evol. Comput. 2019, 47, 33–43. [Google Scholar] [CrossRef]
- Zhao, L.; Ren, Y.; Zeng, Y.; Cui, Z.; Zhang, W. A Knee point-driven Many-objective Pigeon-inspired Optimization Algorithm. Complex Intell. Syst. 2022. [Google Scholar] [CrossRef]
- Ren, Z.; Wang, Y.; Wang, P.; Zhao, X.; Hu, G.; Li, L. Optimal Deployment of Seafloor Observation Network for Tsunami Data Assimilation in the South China Sea. Ocean Eng. 2022, 243, 110309. [Google Scholar] [CrossRef]
- Makinoshima, F.; Oishi, Y.; Yamazaki, T.; Furumura, T.; Imamura, F. Early Forecasting of Tsunami Inundation from Tsunami and Geodetic Observation Data with Convolutional Neural Networks. Nat. Commun. 2021, 12, 2253. [Google Scholar] [CrossRef]
- Scicchitano, G.; Gambino, S.; Scardino, G.; Barreca, G.; Gross, F.; Mastronuzzi, G.; Monaco, C. The Enigmatic 1693 AD Tsunami in the Eastern Mediterranean Sea: New Insights on the Triggering Mechanisms and Propagation Dynamics. Sci. Rep. 2022, 12, 9573. [Google Scholar] [CrossRef]
- Watada, S.; Kusumoto, S.; Satake, K. Traveltime Delay and Initial Phase Reversal of Distant Tsunamis Coupled with the Self-Gravitating Elastic Earth. J. Geophys. Res. Solid Earth 2014, 119, 4287–4310. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | MSE Based on Maximum On-Shore Amplitude | MSE Based on Tsunami Loss | ||
|---|---|---|---|---|
| Iwanuma | Onagawa | Iwanuma | Onagawa | |
| M1 | 1.12 | 0.79 | 6.45 | 9.60 |
| M2 | 0.25 | 0.20 | 3.10 | 3.84 |
| M3 | 0.28 | 0.21 | 3.16 | 3.93 |
| M4 | 0.26 | 0.23 | 3.51 | 4.48 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Goda, K. Hazard and Risk-Based Tsunami Early Warning Algorithms for Ocean Bottom Sensor S-Net System in Tohoku, Japan, Using Sequential Multiple Linear Regression. Geosciences 2022, 12, 350. https://doi.org/10.3390/geosciences12090350
Li Y, Goda K. Hazard and Risk-Based Tsunami Early Warning Algorithms for Ocean Bottom Sensor S-Net System in Tohoku, Japan, Using Sequential Multiple Linear Regression. Geosciences. 2022; 12(9):350. https://doi.org/10.3390/geosciences12090350
Chicago/Turabian StyleLi, Yao, and Katsuichiro Goda. 2022. "Hazard and Risk-Based Tsunami Early Warning Algorithms for Ocean Bottom Sensor S-Net System in Tohoku, Japan, Using Sequential Multiple Linear Regression" Geosciences 12, no. 9: 350. https://doi.org/10.3390/geosciences12090350
APA StyleLi, Y., & Goda, K. (2022). Hazard and Risk-Based Tsunami Early Warning Algorithms for Ocean Bottom Sensor S-Net System in Tohoku, Japan, Using Sequential Multiple Linear Regression. Geosciences, 12(9), 350. https://doi.org/10.3390/geosciences12090350