
Adaptive Numerical Modeling of Tsunami Wave Generation and Propagation with FreeFem++



Abstract

1. Introduction
2. Discretization of the sBBM System
2.1. Spatial Discretization
2.2. Time Marching Scheme
3. New Domain Adaptation, Domains Computation and Initial Data
3.1. New Domain Adaptation Technique
- We deduce the limit min max of Th on x and y direction (using boundingbox in FreeFem++).
- We increase the mesh from Th to Th1 by adding layers from the original mesh (using trunc in FreeFem++), the added zone is a size of epsadapt from each side, and we mapped uadapt to unew (using interpolate in FreeFem++, see (b) in Figure 2).
- We define a Heaviside function unewadapt which have a 1 value if the absolute value of unew is grater then or equal to a defined error (erradapt) by the user and 0 otherwise (see (c) in Figure 2).
- We smooth the function unewadapt (see (d) in Figure 2)) solving the following problem:with zero Dirichlet Boundary Condition (BC) only on the new boundary label of Th1 and a Neumann BC in the other boundary label. Here is the real coefficient that controls the smoothness of the solution and f=unewadapt.
- We define a Heaviside function ufinal which has a 1 value if the absolute value of usmadapt is greater then or equal to a defined error (erradapt) by the user and 0 otherwise (see (c) in Figure 2).
- We cut from Th1, the region where ufinal is grater then a defined isoline isoadapt by the user in order to obtain the final mesh Thnew (using trunc in FreeFem++), then we obtain the initial solution mapped over the final mesh using interpolate in FreeFem++, see (f) in Figure 2).
3.2. Domains Computation
3.3. Initial Data
3.3.1. Passive Generation
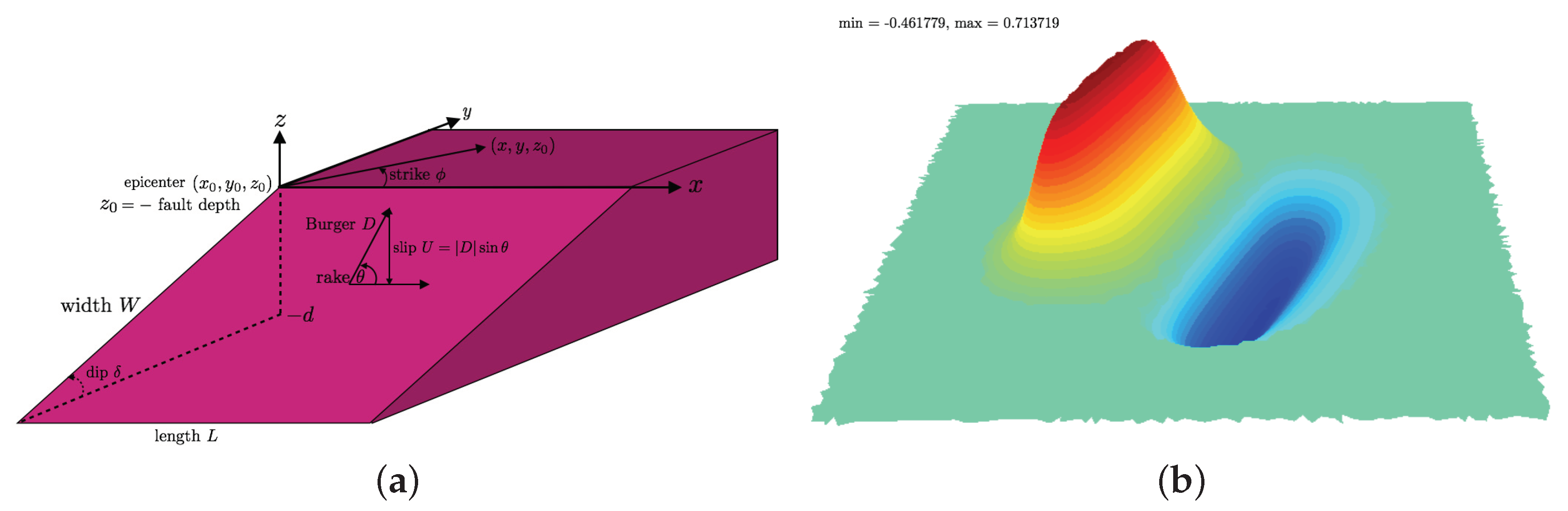
3.3.2. Active Generation
4. Numerical Simulations
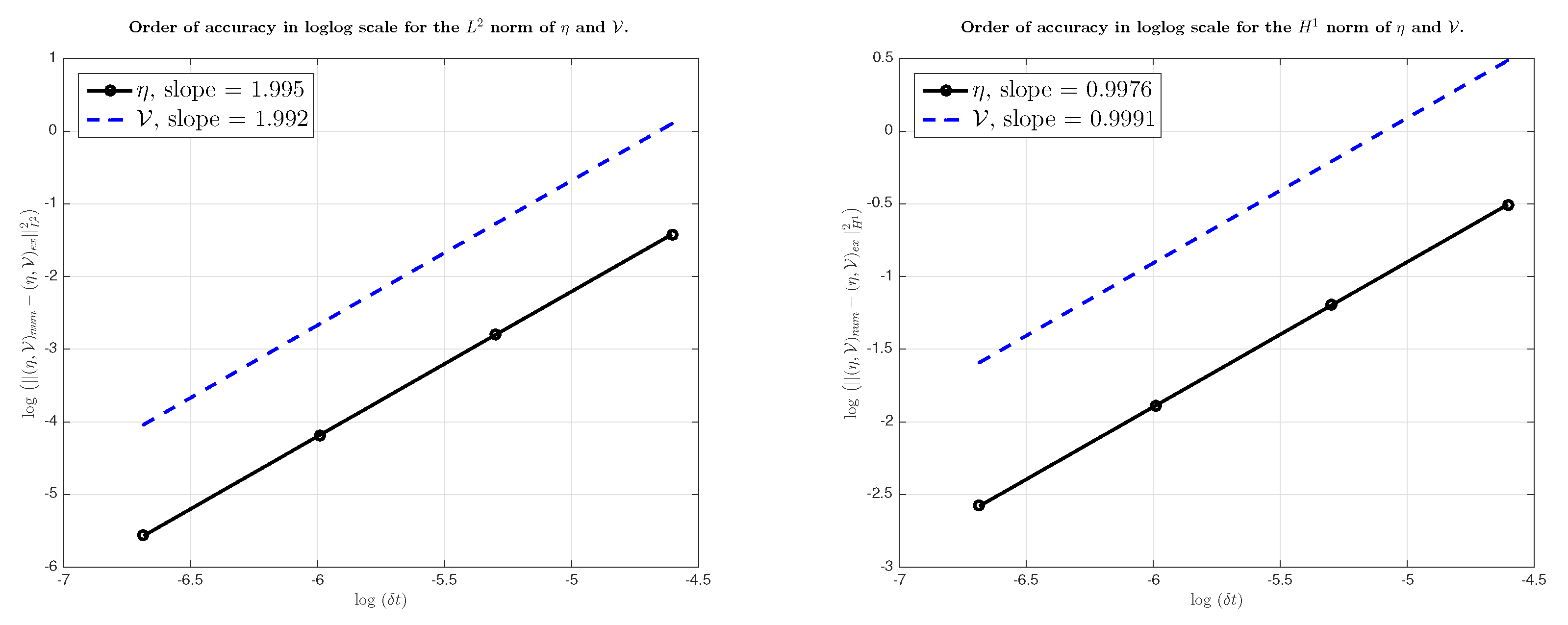
4.1. Rate of Convergence
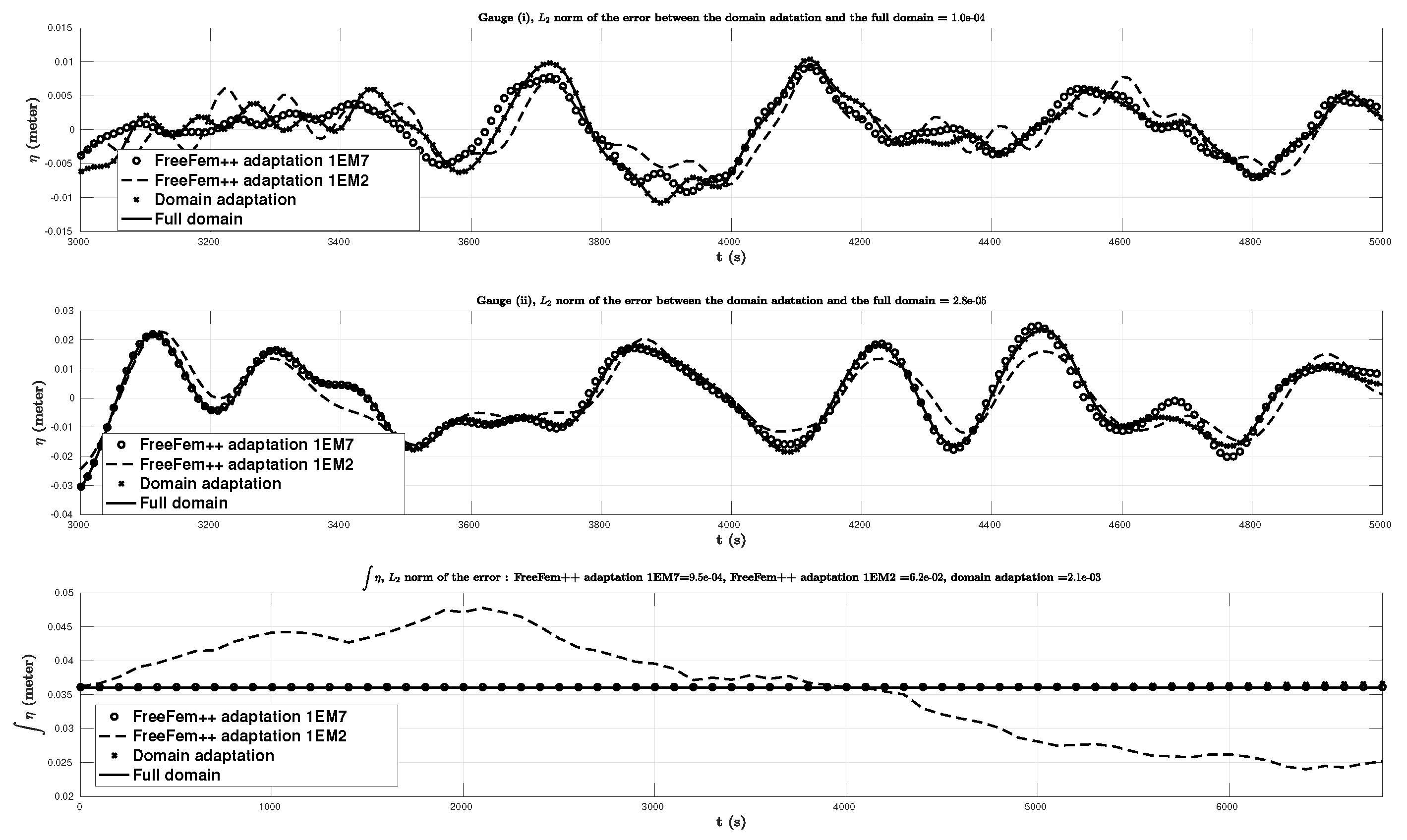
4.2. Propagation of a Tsunami Wave in the Mediterranean Sea with a Flat Bottom
- Th = adaptmesh (Th, uadapt, err = 1.e−7, errg = 1.e − 2, hmin = Dx, iso = true, nbvx = 1e8),
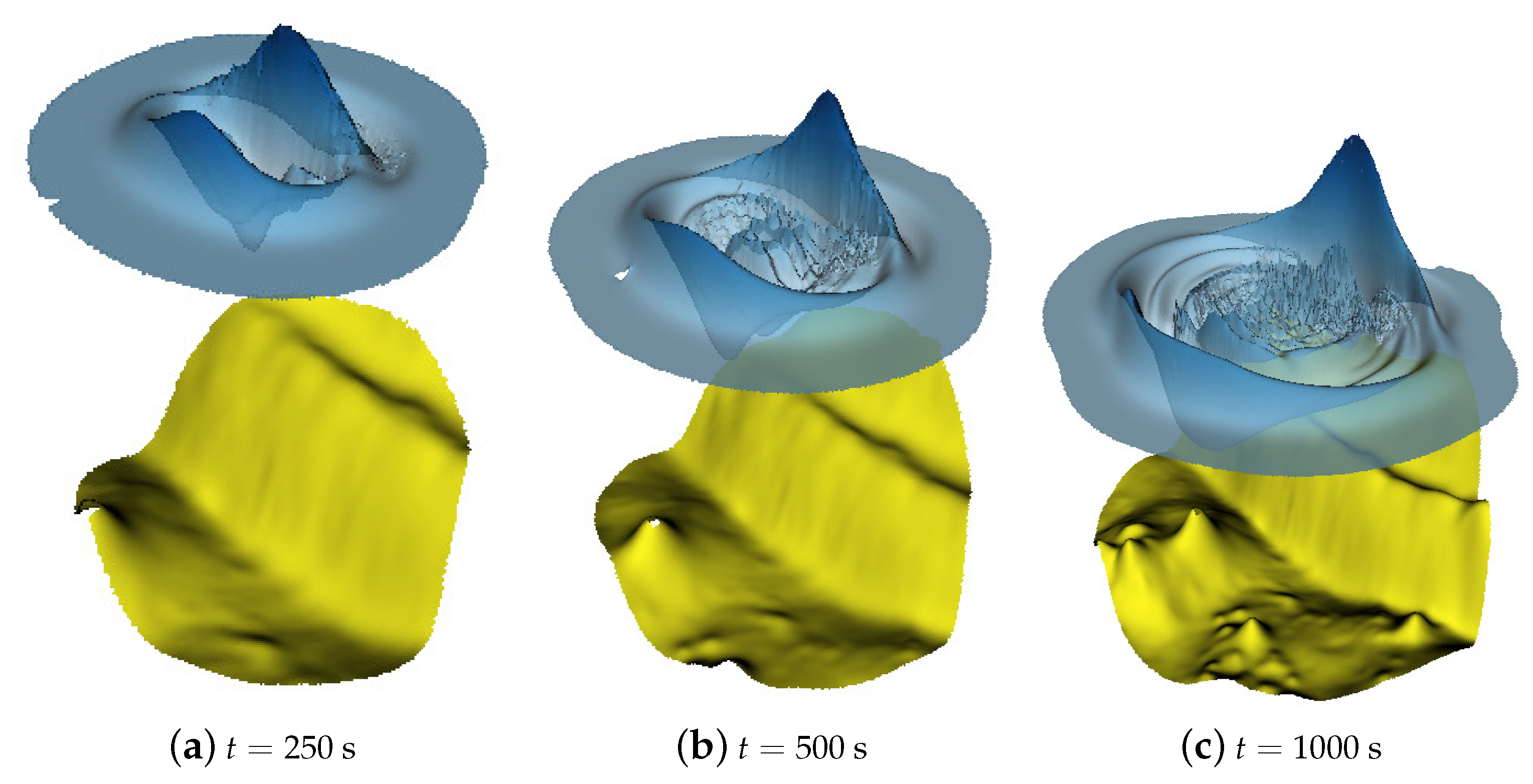
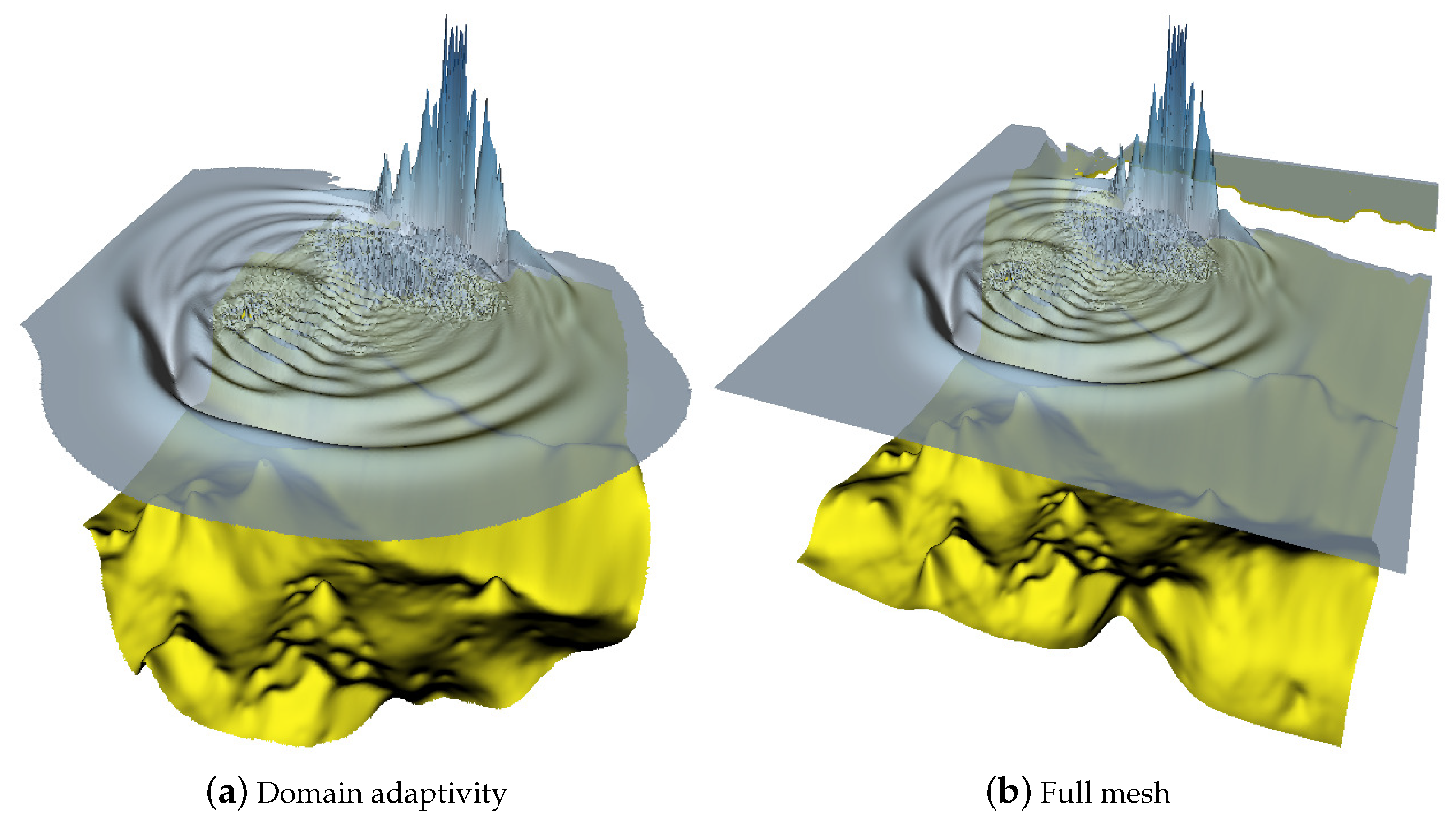
4.3. Propagation of a Tsunami Wave near the Java Island: Passive Generation
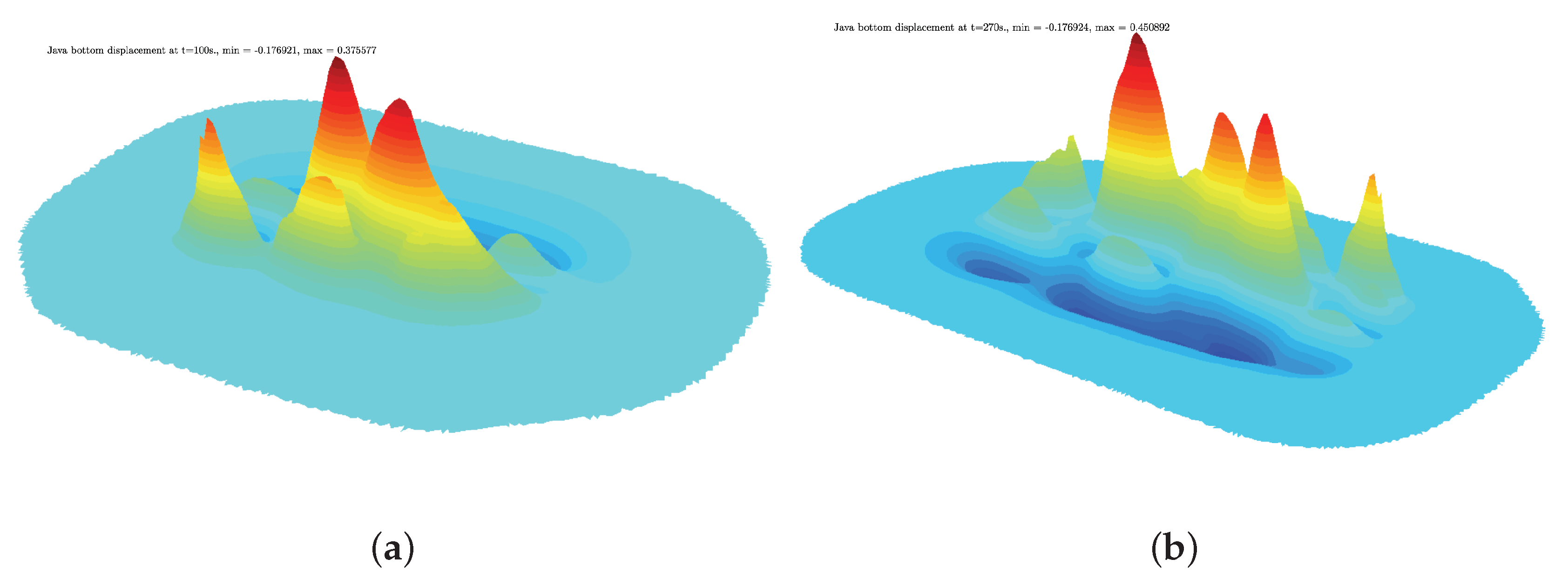
4.4. Propagation of a Tsunami Wave near the Java Island: Active Generation
5. Conclusions and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| 2D | Two-dimensional |
| BBM | Benjamin–Bona–Mahony |
| BC | Boundary Condition |
| FEM | Finite Element Method |
| FreeFem++ | Free Finite Element Method |
| LGPL | GNU Lesser General Public License |
| MOST | Method Of Splitting Tsunami |
| NOAA | National Oceanic and Atmospheric Administration |
| PDE | Partial Differential Equation |
| USGS | United States Geological Survey |
Appendix A. Simplified System Derivation
References
- Sadaka, G.; Dutykh, D. Adaptive numerical modelling of tsunami wave generation and propagation with FreeFem++. HAL 2020, hal-029125. [Google Scholar] [CrossRef]
- Hecht, F.; Auliac, S.; Pironneau, O.; Morice, J.; Le Hyaric, A.; Ohtsuka, K. FreeFem++ (Manual), 3rd ed.; Université Pierre et Marie Curie: Paris, France, 2007; p. 424. Available online: www.freefem.org (accessed on 1 September 2020).
- Imamura, F. Simulation of wave-packet propagation along sloping beach by TUNAMI-code. In Long-wave Runup Models; Yeh, H., Liu, P.L.F., Synolakis, C.E., Eds.; World Scientific: Singapore, 1996; pp. 231–241. [Google Scholar]
- Titov, V.V.; González, F.I. Implementation and testing of the method of splitting tsunami (MOST) model. In Technical Report ERL PMEL-112, Pacific Marine Environmental Laboratory; NOAA: Seattle, WA, USA, 1997. [Google Scholar]
- Dutykh, D.; Poncet, R.; Dias, F. The VOLNA code for the numerical modeling of tsunami waves: Generation, propagation and inundation. Eur. J. Mech. B/Fluids 2011, 30, 598–615. [Google Scholar] [CrossRef]
- Khakimzyanov, G.S.; Dutykh, D.; Mitsotakis, D.; Shokina, N.Y. Numerical simulation of conservation laws with moving grid nodes: Application to tsunami wave modelling. Geosciences 2019, 9, 197. [Google Scholar] [CrossRef]
- Boussinesq, J.V. Théorie généale des mouvements qui sont propagés dans un canal rectangulaire horizontall. C. R. Acad. Sci. Paris 1871, 73, 256–260. [Google Scholar]
- Wu, T.Y. Long Waves in Ocean and Coastal Waters. J. Eng. Mech. 1981, 107, 501–522. [Google Scholar]
- Dias, F.; Dutykh, D.; O’Brien, L.; Renzi, E.; Stefanakis, T. On the Modelling of Tsunami Generation and Tsunami Inundation. Procedia IUTAM 2014, 10, 338–355. [Google Scholar] [CrossRef]
- Dutykh, D.; Mitsotakis, D.; Gardeil, X.; Dias, F. On the use of the finite fault solution for tsunami generation problems. Theor. Comput. Fluid Dyn. 2013, 27, 177–199. [Google Scholar] [CrossRef]
- Guesmia, M.; Heinrich, P.H.; Mariotti, C. Numerical simulation of the 1969 Portuguese tsunami by a finite element method. Nat. Hazards 1998, 17, 31–46. [Google Scholar] [CrossRef]
- Lynett, P.J.; Borrero, J.C.; Liu, P.L.F.; Synolakis, C.E. Field Survey and Numerical Simulations: A Review of the 1998 Papua New Guinea Tsunami. Pure Appl. Geophys. 2003, 160, 2119–2146. [Google Scholar] [CrossRef]
- Mitsotakis, D.E. Boussinesq systems in two space dimensions over a variable bottom for the generation and propagation of tsunami waves. Math. Comp. Simul. 2009, 80, 860–873. [Google Scholar] [CrossRef]
- Whitham, G.B. Linear and Nonlinear Waves; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1999; p. 656. [Google Scholar] [CrossRef]
- Stoker, J.J. Water Waves: The Mathematical Theory with Applications; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 1992; p. 600. [Google Scholar] [CrossRef]
- Peregrine, D.H. Calculations of the development of an undular bore. J. Fluid Mech. 1966, 25, 321–330. [Google Scholar] [CrossRef]
- Peregrine, D.H. Long waves on a beach. J. Fluid Mech. 1967, 27, 815–827. [Google Scholar] [CrossRef]
- Løvholt, F.; Pedersen, G. Instabilities of Boussinesq models in non-uniform depth. Int. J. Num. Meth. Fluids 2009, 61, 606–637. [Google Scholar] [CrossRef]
- Liang, Q.; Hou, J.; Amouzgar, R. Simulation of Tsunami Propagation Using Adaptive Cartesian Grids. Coast. Eng. J. 2015, 57, 1550016. [Google Scholar] [CrossRef]
- Popinet, S. A vertically-Lagrangian, non-hydrostatic, multilayer model for multiscale free-surface flows. J. Comp. Phys. 2020, 418, 109609. [Google Scholar] [CrossRef]
- Dias, F.; Dutykh, D. Dynamics of tsunami waves. In Extreme Man-Made and Natural Hazards in Dynamics of Structures; Ibrahimbegovic, A., Kozar, I., Eds.; Springer: Dordrecht, The Netherlands, 2007; pp. 35–60. [Google Scholar] [CrossRef]
- Dougalis, V.A.; Mitsotakis, D.E.; Saut, J.C. On initial-boundary value problems for a Boussinesq system of BBM-BBM type in a plane domain. Discret. Contin. Dyn. Syst. 2009, 23, 1191–1204. [Google Scholar] [CrossRef]
- Khakimzyanov, G.; Dutykh, D. Long Wave Interaction with a Partially Immersed Body. Part I: Mathematical Models. Commun. Comput. Phys. 2020, 27, 321–378. [Google Scholar] [CrossRef]
- Dutykh, D.; Dias, F. Water waves generated by a moving bottom. In Tsunami and Nonlinear Waves; Kundu, A., Ed.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 65–95. [Google Scholar] [CrossRef]
- Dutykh, D. Mathematical Modelling of Tsunami Waves. Ph.D. Thesis, École Normale Supérieure de Cachan, Cachan, France, 2007. [Google Scholar]
- Okada, Y. Surface deformation due to shear and tensile faults in a half-space. Bull. Seismol. Soc. Am. 1985, 75, 1135–1154. [Google Scholar]
- Okada, Y. Internal deformation due to shear and tensile faults in a half-space. Bull. Seismol. Soc. Am. 1992, 82, 1018–1040. [Google Scholar]
- Kervella, Y.; Dutykh, D.; Dias, F. Comparison between three-dimensional linear and nonlinear tsunami generation models. Theor. Comput. Fluid Dyn. 2007, 21, 245–269. [Google Scholar] [CrossRef]
- Dutykh, D.; Dias, F.; Kervella, Y. Linear theory of wave generation by a moving bottom. Comptes Rendus Math. 2006, 343, 499–504. [Google Scholar] [CrossRef]
- Dutykh, D.; Mitsotakis, D.; Chubarov, L.B.; Shokin, Y.I. On the contribution of the horizontal sea-bed displacements into the tsunami generation process. Ocean Model. 2012, 56, 43–56. [Google Scholar] [CrossRef]
- Hammack, J. A note on tsunamis: Their generation and propagation in an ocean of uniform depth. J. Fluid Mech. 1973, 60, 769–799. [Google Scholar] [CrossRef]
- Sadaka, G. Solution of 2D Boussinesq systems with FreeFem++: The flat bottom case. J. Numer. Math. 2012, 20, 303–324. [Google Scholar] [CrossRef]
- Senthilkumar, A. On the influence of wave reflection on shoaling and breaking solitary Waves. Proc. Est. Acad. Sci. 2016, 65, 414–430. [Google Scholar] [CrossRef]
- Hecht, F. New development in Freefem++. J. Numer. Math. 2012, 20, 251–266. [Google Scholar] [CrossRef]
- Rakotondrandisa, A.; Sadaka, G.; Danaila, I. A finite-element toolbox for the simulation of solid-liquid phase-change systems with natural convection. Comput. Phys. Commun. 2020, 253, 107188. [Google Scholar] [CrossRef]
- Dutykh, D.; Dias, F. Energy of tsunami waves generated by bottom motion. Proc. R. Soc. Lond. A 2009, 465, 725–744. [Google Scholar] [CrossRef]
- Sadaka, G. Etude mathématique et numérique d’équations d’ondes aquatiques amorties. Ph.D. Thesis, Université de Picardie Jules Verne, Amiens, France, 2011. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | Rate | Rate | Rate | Rate | |||||
|---|---|---|---|---|---|---|---|---|---|
| 0.24145 | - | 1.10773 | - | 0.60317 | - | 1.62575 | - | ||
| 0.06078 | 1.990 | 0.28016 | 1.983 | 0.30196 | 0.998 | 0.81276 | 1.000 | ||
| 0.01524 | 1.996 | 0.07038 | 1.993 | 0.15119 | 0.998 | 0.40696 | 0.999 | ||
| 0.00381 | 1.999 | 0.01760 | 1.999 | 0.07578 | 0.998 | 0.20355 | 0.999 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sadaka, G.; Dutykh, D. Adaptive Numerical Modeling of Tsunami Wave Generation and Propagation with FreeFem++. Geosciences 2020, 10, 351. https://doi.org/10.3390/geosciences10090351
Sadaka G, Dutykh D. Adaptive Numerical Modeling of Tsunami Wave Generation and Propagation with FreeFem++. Geosciences. 2020; 10(9):351. https://doi.org/10.3390/geosciences10090351
Chicago/Turabian StyleSadaka, Georges, and Denys Dutykh. 2020. "Adaptive Numerical Modeling of Tsunami Wave Generation and Propagation with FreeFem++" Geosciences 10, no. 9: 351. https://doi.org/10.3390/geosciences10090351
APA StyleSadaka, G., & Dutykh, D. (2020). Adaptive Numerical Modeling of Tsunami Wave Generation and Propagation with FreeFem++. Geosciences, 10(9), 351. https://doi.org/10.3390/geosciences10090351