Abstract
Manipulating micro objects has become an important task in several applications. Actuation is a crucial aspect of micromanipulation because there are physical restrictions which affect actuators’ performances at the micro or nano scale. One way of getting rid of these limitations is the use of an appropriate mechanical structure which enhances the elasticity of the material or provides mechanical advantage. This Special Issue of Actuators, which is dedicated to micromanipulation, offers a contribution to the development of some promising methods to actuate a microsystem for micromanipulation.
1. Introduction
During the last decades, microsystems have been developing very fast thanks to progress in science and technology, giving rise to two main crucial questions, namely,
- how could these micro devices be fabricated and operated?
- how could they improve certain aspects of our lives?
The first question leads to classical issues of engineering, such as design, fabrication and control, which study the most convenient way to create the tools for micromanipulation.
The second question is clearly related to the applications of these new developed tools and to their exploitation, as an opportunity to solve old and new problems for the improvement of certain aspects of our lives.
1.1. Downsizing Effects
Once involved in the development of a microsystem, designers immediately come across the problem of handling the scaling effects. They soon become capable of monitoring how surface and volume properties change their impact on a system; once the latter is downsized by one or more orders of magnitude from the human-size typical dimensions: of course, surfaces or volumes will reduce their quantities by the square or the cube, respectively, of the reduced lengths.
Scaling effects were described by Galileo Galilei in 1638 [1]. He pointed out that “a large animal does not possess simply a bone on a larger scale, but its thickness must increase more quickly than the length of the relevant bone”, because resistance and weight scale their quantities differently during downsizing. Similarly, “a giant would never have the same limb ratios of a man with a normal size, but he must have thicker limbs suitable to support its mass”.
After about a century, Jonathan Swift described the voyage of Lemuel Gulliver [2] to Lilliput. In the book, the imaginary Surgeon, and then a Captain, reports, literally, that the Lilliputian “mathematicians, having taken the height of my body by the help of a quadrant, and finding it to exceed theirs in the proportion of twelve to one, they concluded from the similarity of their bodies, that mine must contain at least 1724 of theirs, and consequently would require as much food as was necessary to support that number of Lilliputians”. Surprisingly, the mentioned human-to-lilliputian food ratio (1724) only approximates the square of 12 (1728) and, even more curiously, the year of publication of the book (1726).
1.2. Design, Fabrication, and Control
Design, fabrication and control of microsystems for micromanipulation have to face several difficulties because, at the micro or nano scale levels, several paradigms of macro-scale engineering are no longer valid [3]. These and many other consequences and implications have been early underlined by Richard P. Feynman, during his seminal talk given on 26 December 1959 at the annual meeting of the American Physical Society (APS) at the California Institute of Technology [4]. In this speech, Feynman surprisingly mentioned many applications such as computer miniaturization, microsurgery, micro-machining and actuation.
Nowadays, an increasing number of applications are demanding high-precision tools which introduce more and more constraints to their design, following the classical client-to-designer feedback.
The following issues have been particularly discussed in the literature.
- Micromanipulation mechanics [5,6,7]:
- theoretical modeling,
- numerical simulation, and
- experimental testing.
- Microsystems architecture, components and manufacturing [8,9,10,11,12]:
- design,
- fabrication,
- fabrication constrained design rules,
- packaging and
- biocompatibility.
- Actuation and Sensing [13,14,15,16]:
- electrostatic,
- electrothermal,
- electromagnetic,
- piezoelectric.
- Micro-electro-mechanical system (MEMS) integration:
- lab-on-chip systems [17,18,19],
- MEMS integration with Application Specific Integrated Circuit (ASIC) [20,21].
- Control [22,23,24]:
- automatic regulation and control of microsystems,
- operational aspects of micromanipulation,
- measurements.
However, while Nanotechnology has found a certain variety of good (although still perfectible) solutions to many problems in MEMS developing [25], what makes micromanipulation particularly difficult is its actuation. In fact, the available sources are often not able to exert an adequate force or torque. Furthermore, the highest performances are achieved only within a rather restricted range for end-effector displacements, and so the mechanical structure of the microsystem must be optimized. In fact, actuators are devices which transform energy (e.g., thermal or electrical, depending on the available source) in mechanical energy. Using the classical sources, such as electrostatic, thermal (shape memory, electrothermal), electromagnetic, or piezoelectric [26], it turns out that it is rather difficult to achieve both a large force together with a large displacement at the output link and, therefore, a micro mechanism can be employed to gain the mechanical advantage. Fortunately, recent developments in MEMS Technology allows designers to introduce different sorts of micro mechanisms, such as microgrippers [27,28], with multi-hinge and multi-DoF (Degrees of Freedom) properties, and other multi-axes devices [29]. Such opportunity gave rise to the introduction of a design technique based on the rigid-body replacement method [30], which refers to classical issues of mechanism science such as topology [31,32], kinematic synthesis [33,34,35], kinetostatic indexing [36], isotropic compliance [37,38] and parametric design [39,40].
1.3. Applications
Nowadays, micro or nano manipulation is very attractive in a large variety of applications, ranging from medicine, surgery or biology, to microelectronics, micro mechanics and aerospace. Therefore, the following items represent a non-exhaustive list of much more examples of applications:
- drug delivery [41,42],
- minimal-invasive surgery [43,44],
- tissue or cell manipulation [30,45,46,47],
- diagnostics [48,49,50,51],
- aerospace [52,53,54],
- micro-assembly [16,55,56,57], and
- microelectronics [58,59].
1.4. Forthcoming or Emerging Issues
Other than the above-mentioned classical issues, there are some others that are either more recent or, at least, less usual than the former. In fact, once new concepts become well-established and real devices, the interest in their optimization and use increases. Furthermore, some other related issues appear, and so the following topics could soon become new topics for MEMS and microsystem applications.
- Computational intelligence: optimization and control of microsystems [60,61].
- Development of ambient intelligence [62] based on sensors, actuators and standardized internet communication.
- Use of nonlinearity benefits [63,64].
- Configuration management and reconfigurable manufacturing systems for the development of microsystems during lifecycle [65].
- Ethics: ethical issues in the activities of criteria-based decision making autonomous micro-manipulators in the medical, biological, aerospace and industrial fields [66,67,68,69,70].
- Education: new trends in microsystems teaching–learning methods, tinkering, open access, wiki tools [71,72].
2. On the Variety of Demand vs. the Supplying Capability
A selection of 1846 papers concerning “micromanipulation”, distributed over seven different meta categories, namely, Biology, Computer Science, Engineering, Medicine, Multidisciplinary issues, Physics/Chemistry, Science have been analyzed. These categories have been named after the classification suggested by one of the most acknowledged database for Science and Technology, that is the Web of Science [73]. A series of queries has been launched on the database and some statistical data have been extracted. At the first sight, among the above mentioned categories, there is one which can be assumed to represent the “supplying capacity” at the actual state of the art, as introduced in Section 1.2, namely,
- Engineering,
The other six categories represent the variety of the demand of micromanipulation technology and its temporary success in applications, as mentioned in Section 1.3, that are
- Biology,
- Physics and Chemistry,
- Medicine,
- Computer Science,
- Multidisciplinary issues, and
- Science.
Statistical analysis has revealed that the struggling for technological readiness, that could be reasonably represented by the filed of engineering, collects almost a half of all contributions, about 45% of the papers. On the other hand, the applications, which could be thought as the “recipient” of the technological progress, gather the other half of the full bunch of papers. More in detail, the Biomedical Sciences, including Biology (18%) and Medicine (11%), form 29% of contributions. General categories such as Science (3%) and Physics/Chemistry (13%) form about 16% of the considered papers. Finally, Computer Science includes 6% of the selected papers, while the last 4% concerns multidisciplinary issues. Figure 1 illustrates the distribution of the selected papers according to the above-mentioned categories.
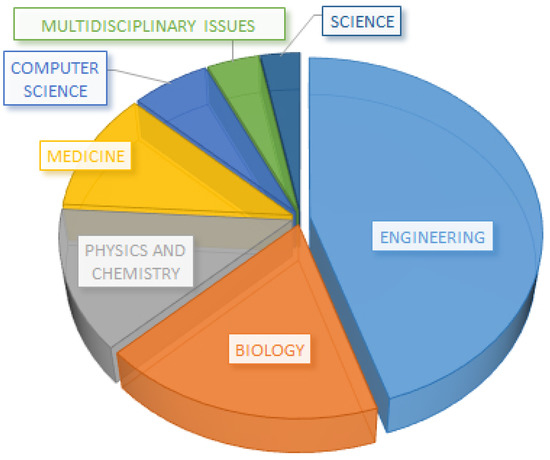
Figure 1.
Statistical distribution of 1864 papers concerning “micromanipulation” along seven different groups, gathered over 83 Web of Science Categories.
The adopted method of paper selection has been based on classical database query tools, as implemented in WoS [73] and, therefore, the search keys, which consist of selected words, may be subject to double meaning errors. This introduces an error that can be roughly estimated by manually checking some elements extracted from a randomly sampled group. On the basis of a rough estimation, the mistake is expected not to exceed 3% of the values.
The results of the present investigation show that research into micromanipulation is still more extended in the field of engineering than in any of the other applicative fields. However, the full group of applications represents half of the analyzed papers, which shows that engineering vs. applications are nowadays in balance.
These results probably reveal the actual struggle of investigators to improve the technical characteristics from a rather low technological readiness level (TRL) [74], to higher TRL values that are more suitable for immediate and commercial applications. It is rather difficult to predict how much time it takes to make micromanipulation technology ready for more applications in hospitals, labs, cars, aircraft, appliances, and so on, while, on the other hand, it is easy to infer that the number of applications will increase as much as new confidence is acquired in the construction and control of the tools.
3. Tools for the Observation
As known, the human eye normally barely distinguish objects within the size of a few tens of microns, which makes it difficult for us to monitor micro devices without a proper means of magnification. Usually, optical microscopy could give a first-hand tool for observation, with the advantage of operating in air or liquid environments. However, SEM observation is more helpful to characterize the prototypes, because of their higher resolution. For this reason, in MEMS development, the moment always comes, eventually, to take an SEM picture of a microsystem. Usually, an image obtained by an SEM instrument declares the adopted magnification factor and other technical data and, therefore, there is no real need to use a side comparison object (whose dimensions are universally known). At the macro level, classical objects can be used to compare the observed subject with familiar objects, such as a one cent coin or the portion of a ruler. However, while moving around either the “brobdingnag” or the “lilliput” worlds, it is not always easy to grasp the real sense of the size of an object which has unusual dimensions, such as gigantic (planets, stars, galaxies) or minuscule (cells, atoms) things.
Figure 2 is an example of a comparison exercise at the microscale. An adult housefly, musca domestica, was positioned over the square portion of a silicon wafer where a microgripper had been fabricated [12]. According to the construction process and the adopted parameters, each microgripper lays within a 5 × 5 mm window, whereas adult houseflies are usually from 6 to 7 mm in size. That is why the whole insect was as long as the length of a microgripper window. The fly eyes, whose diameter is approximately one millimeter and a half, are visible at the top of Figure 2, while the microgripper shows up in the lower half of the picture. In the upper half of the figure, the compound eyes of the fly appear in all their complexity. In fact, there are almost 3500 ommatidia facets in the musca domestica’ eye [75], while the single ommatidium is about 10 m [76]. This figure make the microgripper a bit less mysterious object to our understanding.
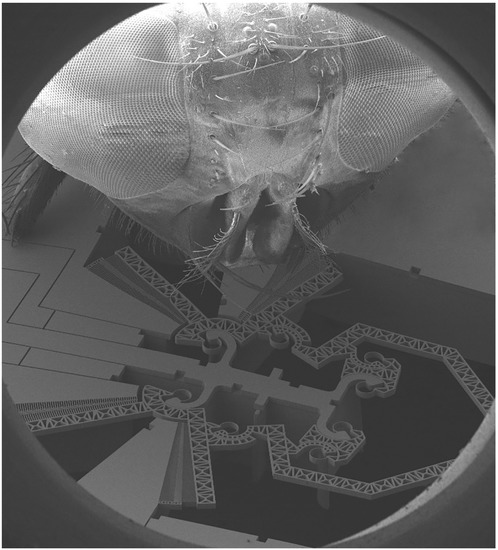
Figure 2.
SEM image obtained by Alvise Bagolini and Michele Fedrizzi at Micro Nano Fabrication and Characterization Facility, Fondazione Bruno Kessler, Trento, Italy (PS the housefly has been found dead in Villamontagna, Trento, Italy and no harm has been inflicted to the poor insect).
4. Micro- or Nano-Manipulators vs. Micro- or Nano-Robots
Finally, it is worth noting that the terms micromanipulator and microrobot (the same holds for the pair nanomanipulator and nanorobot) are often used as synonymous, while it would be better not to confuse them that way. In fact, developments in technology have made it possible to build devices with different features; for example, their overall size or their positioning or manipulating accuracy.
Considering the scope of developing miniaturized devices at the bottom scale, it seems to be appropriate to refer to such devices as microrobots, micromechanisms, micromachines or, more generally, microsystems (nanorobots, nanomechanism, and so on). On the other hand, when a device (no matter about its size) is required to be able to manipulate objects with micro (or nano) accuracy, then it seems that the term micromanipulators (or nanomanipulators) becomes more appropriate.
This distinction is quite substantial. In fact, in many occasions, it is necessary to handle micro- or nano-objects, with limited concern about the size of the manipulating object. For example, nano-manipulators used inside the chamber of a Scanning Electron Microscope (SEM) may have extraordinary resolution, <0.5 nm, with rather a, relatively, large overall size, of about 6 cm [77]. On the other hand, in some other circumstances, it is necessary to have a small system, namely, a microsystem, which is able to operate within specific environments, with very restrictive size limits. Interest in miniaturizing micromechanisms [78], microrobots [79,80], microgrippers [81,82], and microtribometer [83] has been recently expressed. In fact, in all these examples. the size of the microsystem was fundamental for the performance of its function.
5. Conclusions
The present Editorial has been written with the intent of intriguing readers and colleagues who may want to deepen the topic of actuation at the microscale, specially for the purpose of micromanipulation. The actual state-of-the-art shows that this problem is rather far from being exhausted and, therefore, the present Special Issue represents an invitation to accept the challenge to find proper solutions to this endeavour.
Conflicts of Interest
The author declears no conflict of interest.
References
- Galilei, G. Discourses and Mathematical Demonstrations Relating to Two New Sciences [In Italian: Discorsi e Dimostrazioni Matematiche Intorno a Due Nuove Scienze Attenenti Alla Meccanica E I Movimenti Locali]; Lodewijk Elzevir: Leiden, The Netherlands, 1638. [Google Scholar]
- Swift, J. Travels into Several Remote Nations of the World. In Four Parts. By Lemuel Gulliver, First a Surgeon, and then a Captain of Several Ships; Benjamin Motte: London, UK, 1726. [Google Scholar]
- Bhushan, B.E. (Ed.) Springer Handbook of Nanotechnology; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Feynman, R.P. There’s plenty of room at the bottom [data storage]. J. Microelectromech. Syst. 1992, 1, 60–66. [Google Scholar] [CrossRef]
- Huang, H.; Kamm, R.D.; Lee, R.T. Cell mechanics and mechanotransduction: Pathways, probes, and physiology. Am. J. Physiol. Cell Physiol. 2004, 287, C1–C11. [Google Scholar] [CrossRef] [PubMed]
- Swaminathan, V.; Mythreye, K.; Tim O’Brien, E.; Berchuck, A.; Blobe, G.; Superfine, R. Mechanical Stiffness grades metastatic potential in patient tumor cells and in cancer cell lines. Cancer Res. 2011, 71, 5075–5080. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Liu, K.K. Optical tweezers for single cells. J. R. Soc. Interface 2008, 5, 671–690. [Google Scholar] [CrossRef]
- Potrich, C.; Lunelli, L.; Bagolini, A.; Bellutti, P.; Pederzolli, C.; Verotti, M.; Belfiore, N.P. Innovative silicon microgrippers for biomedical applications: Design, mechanical simulation and evaluation of protein fouling. Actuators 2018, 7, 12. [Google Scholar] [CrossRef]
- Huesgen, T.; Woias, P.; Kockmann, N. Design and fabrication of MEMS thermoelectric generators with high temperature efficiency. Sens. Actuators A Phys. 2008, 145–146, 423–429. [Google Scholar] [CrossRef]
- Judy, J.W. Microelectromechanical systems (MEMS): Fabrication, design and applications. Smart Mater. Struct. 2001, 10, 1115–1134. [Google Scholar] [CrossRef]
- Shen, D.; Park, J.H.; Ajitsaria, J.; Choe, S.Y.; Wikle, H.C.; Kim, D.J. The design, fabrication and evaluation of a MEMS PZT cantilever with an integrated Si proof mass for vibration energy harvesting. J. Micromech. Microeng. 2008, 18, 055017. [Google Scholar] [CrossRef]
- Bagolini, A.; Ronchin, S.; Bellutti, P.; Chistè, M.; Verotti, M.; Belfiore, N.P. Fabrication of Novel MEMS Microgrippers by Deep Reactive Ion Etching with Metal Hard Mask. J. Microelectromech. Syst. 2017, 26, 926–934. [Google Scholar] [CrossRef]
- Rezazadeh, G.; Tahmasebi, A.; Zubstov, M. Application of piezoelectric layers in electrostatic MEM actuators: Controlling of pull-in voltage. Microsyst. Technol. 2006, 12, 1163–1170. [Google Scholar] [CrossRef]
- Pacheco, S.P.; Katehi, L.P.B.; Nguyen, C.T.C. Design of low actuation voltage RF MEMS switch. In Proceedings of the 2000 IEEE MTT-S International Microwave Symposium Digest, Boston, MA, USA, 11–16 June 2000; pp. 165–168. [Google Scholar]
- Bell, D.J.; Lu, T.J.; Fleck, N.A.; Spearing, S.M. MEMS actuators and sensors: Observations on their performance and selection for purpose. J. Micromech. Microeng. 2005, 15, S153–S164. [Google Scholar] [CrossRef]
- Donald, B.R.; Levey, C.G.; Paprotny, I. Planar microassembly by parallel actuation of MEMS microrobots. J. Microelectromech. Syst. 2008, 17, 789–808. [Google Scholar] [CrossRef]
- Andrieux, G.; Eloy, J.C.; Mounier, E. Technologies and market trends for polymer MEMS in microfluidics and lab-on-chip. In Proceedings of the SPIE, Progress in Biomedical Optics and Imaging, San Jose, CA, USA, 22–27 January 2005; pp. 60–64. [Google Scholar]
- De Pasquale, G.; Bertana, V.; Scaltrito, L. Experimental evaluation of mechanical properties repeatability of SLA polymers for labs-on-chip and bio-MEMS. Microsyst. Technol. 2018, 24, 3487–3497. [Google Scholar] [CrossRef]
- Palmieri, M. DNA lab on chip rests on MEMS foundation. EDN 2004, 49, 24–28. [Google Scholar]
- Takahashi, K.; Kwon, H.N.; Mita, M.; Fujita, H.; Toshiyoshi, H.; Suzuki, K.; Funaki, H. Monolithic integration of high voltage driver circuits and MEMS actuators by ASIC-like postprocess. In Proceedings of the International Conference on Solid State Sensors and Actuators and Microsystems, Digest of Technical Papers, TRANSDUCERS ’05, Seoul, Korea, 5–9 June 2005; Volume 1, pp. 417–420. [Google Scholar]
- Grayver, E.; M’Closkey, R.T. Automatic gain control ASIC for MEMS gyro applications. In Proceedings of the American Control Conference, Arlington, VA, USA, 25–27 June 2001; Volume 2, pp. 1219–1222. [Google Scholar]
- Borovic, B.; Liu, A.Q.; Popa, D.; Cai, H.; Lewis, F.L. Open-loop versus closed-loop control of MEMS devices: Choices and issues. J. Micromech. Microeng. 2005, 15, 1917–1924. [Google Scholar] [CrossRef]
- Park, S.; Horowitz, R. Adaptive control for the conventional mode of operation of MEMS gyroscopes. J. Microelectromech. Syst. 2003, 12, 101–108. [Google Scholar] [CrossRef]
- Zheng, Q.; Dong, L.; Lee, D.H.; Gao, Z. Active disturbance rejection control for MEMS gyroscopes. IEEE Trans. Control Syst. Technol. 2009, 17, 1432–1438. [Google Scholar] [CrossRef]
- Gad-el Hak, M.E. (Ed.) The MEMS Handbook, 2nd ed.; Mechanical and Aerospace Engineering Series; CRC Press, Tayor and Francis Group: Boca Raton, FL, USA, 2005. [Google Scholar]
- Dochshanov, A.; Verotti, M.; Belfiore, N.P. A Comprehensive Survey on Microgrippers Design: Operational Strategy. J. Mech. Des. Trans. ASME 2017, 139, 070801. [Google Scholar] [CrossRef]
- Belfiore, N.P.; Broggiato, G.; Verotti, M.; Balucani, M.; Crescenzi, R.; Bagolini, A.; Bellutti, P.; Boscardin, M. Simulation and construction of a MEMS CSFH based microgripper. Int. J. Mech. Control 2015, 16, 21–30. [Google Scholar]
- Belfiore, N.P.; Verotti, M.; Crescenzi, R.; Balucani, M. Design, optimization and construction of MEMS-based micro grippers for cell manipulation. In Proceedings of the ICSSE 2013 IEEE International Conference on System Science and Engineering, Budapest, Hungary, 4–6 July 2013; pp. 105–110. [Google Scholar]
- Marano, D.; Cammarata, A.; Fichera, G.; Sinatra, R.; Prati, D. Modeling of a Three-Axes MEMS Gyroscope with Feedforward PI Quadrature Compensation. In Advances on Mechanics, Design Engineering and Manufacturing; Eynardetal, B., Ed.; Springer: Cham, Switzerland, 2017; pp. 71–80. [Google Scholar]
- Sanò, P.; Verotti, M.; Bosetti, P.; Belfiore, N.P. Kinematic Synthesis of a D-Drive MEMS Device with Rigid-Body Replacement Method. J. Mech. Des. Trans. ASME 2018, 140, 075001. [Google Scholar] [CrossRef]
- Belfiore, N.P. Distributed Databases for the development of Mechanisms Topology. Mech. Mach. Theory 2000, 35, 1727–1744. [Google Scholar] [CrossRef]
- Belfiore, N.P. Brief note on the concept of planarity for kinematic chains. Mech. Mach. Theory 2000, 35, 1745–1750. [Google Scholar] [CrossRef]
- Pennestrì, E.; Belfiore, N.P. On the numerical computation of Generalized Burmester Points. Meccanica 1995, 30, 147–153. [Google Scholar] [CrossRef]
- Pennestrì, E.; Belfiore, N.P. Modular third-order analysis of planar linkages with applications. In ASME Design Technical Conference, Mechanism Synthesis and Analysis; ASME: New York, NY, USA, 1994; Volume 70, pp. 99–103. [Google Scholar]
- Pennestrì, E.; Belfiore, N.P. On Crossley’s contribution to the development of graph based algorithms for the analysis of mechanisms and gear trains. Mech. Mach. Theory 2015, 89, 92–106. [Google Scholar] [CrossRef]
- Sinatra, R.; Cammarata, A.; Angeles, J. Kinetostatic and inertial conditioning of the McGill schnflies-motion generator. Adv. Mech. Eng. 2010, 2, 186203. [Google Scholar]
- Verotti, M.; Belfiore, N.P. Isotropic compliance in E(3): Feasibility and workspace mapping. J. Mech. Rob. 2016, 8, 061005. [Google Scholar] [CrossRef]
- Verotti, M.; Masarati, P.; Morandini, M.; Belfiore, N.P. Isotropic compliance in the Special Euclidean Group SE(3). Mech. Mach. Theory 2016, 98, 263–281. [Google Scholar] [CrossRef]
- Kwak, B.M.; Haug, E.J. Optimal synthesis of planar mechanisms by parametric design techniques. Eng. Optim. 1976, 2, 55–63. [Google Scholar] [CrossRef]
- Lu, Q.; Huang, W.; Sun, M. Parametric design of flexible amplification mechanism based on flexure hinge. J. Vib. Meas. Diagn. 2016, 36, 935–941. [Google Scholar]
- Paul, S.R.; Nayak, S.K.; Anis, A.; Pal, K. MEMS-Based Controlled Drug Delivery Systems: A Short Review. Polym. Plast. Technol. Eng. 2016, 55, 965–975. [Google Scholar] [CrossRef]
- Lee, H.J.; Choi, N.; Yoon, E.S.; Cho, I.J. MEMS devices for drug delivery. Adv. Drug Deliv. Rev. 2018, 128, 132–147. [Google Scholar] [CrossRef] [PubMed]
- Rebello, K.J. Applications of MEMS in surgery. Proc. IEEE 2004, 92, 43–55. [Google Scholar] [CrossRef]
- Park, Y.S.; Gopalsami, N.; Gundeti, M.S. Tactile MEMS-based sensor element for robotic surgery. In Proceedings of the American Nuclear Society 2014 Annual Meeting, Reno, NV, USA, 15–19 June 2014; pp. 43–44. [Google Scholar]
- Chronis, N.; Lee, L.P. Polymer mems-based microgripper for single cell manipulation. In Proceedings of the Seventeenth IEEE International Conference on Micro Electro Mechanical Systems, Maastricht, The Netherlands, 25–29 January 2004; pp. 17–20. [Google Scholar]
- Pan, P.; Wang, W.; Ru, C.; Sun, Y.; Liu, X. MEMS-based platforms for mechanical manipulation and characterization of cells. J. Micromech. Microeng. 2017, 27, 123003. [Google Scholar] [CrossRef]
- Di Giamberardino, P.; Bagolini, A.; Bellutti, P.; Rudas, I.J.; Verotti, M.; Botta, F.; Belfiore, N.P. New MEMS tweezers for the viscoelastic characterization of soft materials at the microscale. Micromachines 2017, 9, 15. [Google Scholar] [CrossRef] [PubMed]
- Polla, D.L.; Krulevitch, P.; Wang, A.; Smith, G.; Diaz, J.; Mantell, S.; Zhou, J.; Zurn, S.; Nam, Y.; Cao, L.; Hamilton, J.; Fuller, C.; Gascoyne, P. MEMS-based diagnostic microsystems. In Proceedings of the 1st Annual International IEEE-EMBS Special Topic Conference on Microtechnologies in Medicine and Biology, Lyon, France, 12–14 October 2000; pp. 41–44. [Google Scholar]
- Huang, Y.; Mather, E.L.; Bell, J.L.; Madou, M. MEMS-based sample preparation for molecular diagnostics. Fresenius’ J. Anal. Chem. 2002, 372, 49–65. [Google Scholar] [CrossRef] [PubMed]
- Gnerlich, M.; Perry, S.F.; Tatic-Lucic, S. A submersible piezoresistive MEMS lateral force sensor for a diagnostic biomechanics platform. Sens. Actuators A Phys. 2012, 188, 111–119. [Google Scholar] [CrossRef]
- Pandya, H.J.; Park, K.; Chen, W.; Goodell, L.A.; Foran, D.J.; Desai, J.P. Toward a Portable Cancer Diagnostic Tool Using a Disposable MEMS-Based Biochip. IEEE Trans. Biomed. Eng. 2016, 63, 1347–1353. [Google Scholar] [CrossRef]
- Ho, C.M.; Tung, S.; Lee, G.B.; Tai, Y.C.; Jiang, F.; Tsao, T. MEMS—A technology for advancements in aerospace engineering. In Proceedings of the 35th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 1997. [Google Scholar]
- Kraft, M.; White, N.M. MEMS for Automotive and Aerospace Applications; Woodhead Publishing Series in Electronic and Optical Materials; Elsevier Ltd.: Amsterdam, The Netherlands, 2013; pp. 1–342. [Google Scholar]
- Bhat, K.N.; Nayak, M.M.; Kumar, V.; Thomas, L.; Manish, S.; Thyagarajan, V.; Gaurav, S.; Bhat, N.; Pratap, R. Design, development, fabrication, packaging, and testing of MEMS pressure sensors for aerospace applications. In Micro and Smart Devices and Systems; Vinoy, K.J., Ananthasuresh, G.K., Pratap, R., Krupanidhi, S.B., Eds.; Springer: New Delhi, India, 2014; Volume 14, pp. 3–17. [Google Scholar]
- Nelson, B.J.; Zhou, Y.; Vikramaditya, B. Sensor-Based Microassembly of Hybrid MEMS Devices. IEEE Control Syst. 1998, 18, 35–45. [Google Scholar]
- Tsui, K.; Geisberger, A.; Ellis, M.; Skidmore, G. Micromachined end-effector and techniques for directed MEMS assembly. J. Micromech. Microeng. 2004, 14, 542–549. [Google Scholar] [CrossRef]
- Wei, Y.; Xu, Q. An overview of micro-force sensing techniques. Sens. Actuators A Phys. 2015, 234, 359–374. [Google Scholar] [CrossRef]
- Lin, L. MEMS post-packaging by localized heating and bonding. IEEE Trans. Adv. Packag. 2000, 23, 608–616. [Google Scholar] [CrossRef]
- Howlader, M.M.R.; Okada, H.; Kim, T.H.; Itoh, T.; Suga, T. Wafer level surface activated bonding tool for MEMS packaging. J. Electrochem. Soc. 2004, 151, G461–G467. [Google Scholar] [CrossRef]
- May, G. Intelligent SOP manufacturing. IEEE Trans. Adv. Packag. 2004, 27, 426–437. [Google Scholar] [CrossRef]
- Belfiore, N.P.; Rudas, I. Applications of computational intelligence to mechanical engineering. In Proceedings of the 15th IEEE International Symposium on Computational Intelligence and Informatics, Budapest, Hungary, 19–21 November 2014; pp. 351–368. [Google Scholar]
- Delsing, J.; Lindgren, P. Sensor communication technology towards ambient intelligence. Meas. Sci. Technol. 2005, 16, R37. [Google Scholar] [CrossRef]
- Gammaitoni, L.; Neri, I.; Vocca, H. The benefits of noise and nonlinearity: Extracting energy from random vibrations. Chem. Phys. 2010, 375, 435–438. [Google Scholar] [CrossRef]
- Green, P.; Worden, K.; Atallah, K.; Sims, N. The benefits of Duffing-type nonlinearities and electrical optimisation of a mono-stable energy harvester under white Gaussian excitations. J. Sound Vib. 2012, 331, 4504–4517. [Google Scholar] [CrossRef]
- Puik, E.; Gielen, P.; Telgen, D.; van Moergestel, L.; Ceglarek, D. A generic systems engineering method for concurrent development of products and manufacturing equipment. IFIP Adv. Inf. Commun. Technol. 2014, 435, 139–146. [Google Scholar]
- Ailinger, R.L.; Black, P.L.; Lima-Garcia, N. Use of electronic monitoring in clinical nursing research. Clin. Nurs. Res. 2008, 17, 89–97. [Google Scholar] [CrossRef]
- Morgan, D. Respect for autonomy: Is it always paramount? Nurs. Ethics 1996, 3, 118–125. [Google Scholar] [CrossRef]
- Tuma, J.R. Nanoethics in a Nanolab: Ethics via Participation. Sci. Eng. Ethics 2013, 19, 983–1005. [Google Scholar] [CrossRef]
- Makarczuk, T.; Matin, T.R.; Karman, S.B.; Diah, S.Z.M.; Davaji, B.; MacQueen, M.O.; Mueller, J.; Schmid, U.; Gebeshuber, I.C. Biomimetic MEMS to assist, enhance and expand human sensory perceptions—A survey on state-of-the art developments. In Smart Sensors, Actuators, and MEMS V; Schmid, A., Sánchez-Rojas, J.L., Leester-Schaedel, M., Eds.; SPIE Digital Library: Bellingham, WA, USA, 2011; Volume 8066. [Google Scholar]
- Simou, P.; Alexiou, A.; Tiligadis, K. Artificial humanoid for the elderly people. Adv. Exp. Med. Biol. 2015, 821, 19–27. [Google Scholar] [PubMed]
- Bonciani, G.; Biancucci, G.; Fioravanti, S.; Valiyev, V.; Binni, A. Learning micromanipulation, Part 2: Term projects in practice. Actuators 2018, 7, 56. [Google Scholar] [CrossRef]
- Biancucci, G.; Bonciani, G.; Fioravanti, S.; Binni, A.; Lucchese, F.; Matrisciano, A. Learning micromanipulation, Part 1: An approach based on multidimensional ability inventories and text mining. Actuators 2018, 7, 55. [Google Scholar] [CrossRef]
- Web of Science by Clarivate Analytics. 2018. Available online: https://clarivate.com/products/web-of-science/ (accessed on 18 September 2018).
- Technology Readiness Levels (TRL), Horizon 2020—Work Programme 2018–2020 General Annexes, Extract from Part 19—Commission Decision C(2017)7124. 2017. Available online: http://ec.europa.eu/research/participants/data/ref/h2020/other/wp/2018-2020/annexes/h2020-wp1820-annex-g-trl%5C_en.pdf (accessed on 16 September 2018).
- Sukontason, K.L.; Chaiwong, T.; Piangjai, S.; Upakut, S.; Moophayak, K.; Sukontason, K. Ommatidia of blow fly, house fly, and flesh fly: Implication of their vision efficiency. Parasitol. Res. 2008, 103, 123–131. [Google Scholar] [CrossRef] [PubMed]
- Barlow, H.B. The Size of Ommatidia in Apposition Eyes. J. Exp. Biol. 1952, 29, 667–674. [Google Scholar]
- Kleindiek Nanotechnik GmbH. MM3A-EM Micromanipulator, Version 10.01. © Kleindiek Nanotechnik GmbH. 2018. Available online: https://www.nanotechnik.com/fileadmin/public/brochures/mm3a-em.pdf (accessed on 4 September 2018).
- Belfiore, N.P.; Simeone, P. Inverse kinetostatic analysis of compliant four-bar linkages. Mech. Mach. Theory 2013, 69, 350–372. [Google Scholar] [CrossRef]
- Belfiore, N.P.; Emamimeibodi, M.; Verotti, M.; Crescenzi, R.; Balucani, M.; Nenzi, P. Kinetostatic optimization of a MEMS-based compliant 3 DOF plane parallel platform. In Proceedings of the ICCC 2013 IEEE 9th International Conference on Computational Cybernetics, Tihany, Hungary, 8–10 July 2013; pp. 261–266. [Google Scholar]
- Balucani, M.; Belfiore, N.P.; Crescenzi, R.; Verotti, M. The development of a MEMS/NEMS-based 3 D.O.F. compliant micro robot. Int. J. Mech. Control 2011, 12, 3–10. [Google Scholar]
- Verotti, M.; Dochshanov, A.; Belfiore, N.P. Compliance Synthesis of CSFH MEMS-Based Microgrippers. J. Mech. Des. Trans. ASME 2017, 139, 022301. [Google Scholar] [CrossRef]
- Verotti, M.; Dochshanov, A.; Belfiore, N.P. A Comprehensive Survey on Microgrippers Design: Mechanical Structure. J. Mech. Des. Trans. ASME 2017, 139, 060801. [Google Scholar] [CrossRef]
- Belfiore, N.P.; Prosperi, G.; Crescenzi, R. A simple application of conjugate profile theory to the development of a silicon micro tribometer. In Proceedings of the ASME 2014 12th Biennial Conference on Engineering Systems Design and Analysis, Copenhagen, Denmark, 25–27 June 2014; Volume 2. [Google Scholar]


© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).