1. Introduction
Synthetic jet actuators (SJAs) generate a train of vortices which are formed by periodic suction and ejection of the same amount of fluid across an orifice. This establishes a directional flow with zero net mass input, formed from the ambient fluid surrounding the orifice, hence “synthetic” jet [
1,
2]. These types of actuators have been used to control flow separation and noise, e.g., in aviation applications, as well as more recently in the thermal management of electronics.
An SJA typically consists of a piezoelectric or electromagnetic driver deflecting a flexible membrane inside a cavity, which is connected to an external body of fluid through a short nozzle or orifice (The terms ‘nozzle’ and ‘orifice’ will be used interchangeably in this paper). An oscillation of the internal membrane causes a cavity pressure fluctuation and, thus, an oscillatory flow through the orifice. At a sufficiently high stroke length [
3], a stable vortex detaches from the orifice and propagates into the surrounding flow field, thereby imparting momentum to a boundary layer.
A basic synthetic jet flow emanating into quiescent ambient fluid is characterized by a few parameters: (i) the jet Reynolds number
, where
is the hydraulic diameter of the orifice,
is the fluid kinematic viscosity and
is a characteristic velocity scale representing the average nozzle ejection velocity, defined as
, where
is the actuation frequency. The stroke length
is defined as the average distance a fluid slug is expelled during the ejection phase, assuming a harmonic velocity profile in the orifice which is positive during ejection (
) and negative during the suction phase (
):
where
represents the spatially averaged orifice or nozzle velocity, hence subscript ‘
n’. The dimensionless stroke length
is the reciprocal of a Strouhal number or
. Usually the actuator diaphragm is excited by a sine wave, in which case the characteristic velocity
where
is the peak (spatially averaged) orifice velocity, or the amplitude of the sine wave
.
For sharp-edged orifices, threshold values for a vortex to detach, and thus for a synthetic jet flow to form, are
for a circular orifice and
for a two-dimensional slot orifice with infinite aspect ratio
, where
is defined as the span-to-width ratio of a rectangular slot or
. The stroke length is a characteristic for the flow structure [
4].
For flow control purposes, the SJA is usually embedded within a streamlined or bluff body, with the jet emanating from a surface at an angle [
5,
6]. For electronics cooling purposes, the synthetic jet flow is usually directed at a surface, impinging onto the object to be cooled [
7]. In both cases however, the orifice can be circular or rectangular in shape, and the jet can issue at an oblique angle. Moreover, the use of dual adjacent SJAs can be used to achieve flow vectoring, determined by the phase difference in the driving signals for adjacent actuators [
8].
Each of these configurations leads to quite different and complicated pressure fields, making it hard to predict SJA performance a priori. Since the jet flow structure is determined by the aforementioned dimensionless groups
and
, information is needed about the synthetic jet orifice velocity
, or for sine wave actuation, simply the velocity amplitude
. Hence:
However, the orifice velocity cannot be inferred directly from the driving voltage
. Nor can the orifice velocity be measured easily in typical applications, requiring either intrusive techniques (e.g., hot-wire anemometry) or more expensive optical velocity measurements. A calibration correlating actuator voltage
with orifice velocity
can be performed; however, this may be subject to degradation or drift in actuator characteristics. A calibration of cavity acoustic pressure
with orifice velocity is, therefore, preferred [
9,
10,
11]. For instance, when changing the phase difference between adjacent SJAs, only a pressure-velocity calibration approach can maintain a constant jet Reynolds number [
8].
For a synthetic jet issuing into an external boundary layer, the combined flow field is further characterized by the velocity ratio or the dimensionless frequency , where is the freestream velocity and represents the streamwise location of the SJA from a leading edge, or the length of a separated zone.
Three main types of actuating mechanisms have been used to generate synthetic jet flows in academic research, (i) an oscillating piston, (ii) an electromagnetic loudspeaker or (iii) a piezoelectric bending element. Both air and liquid have been used as working fluids. It will be shown in
Section 2 that the type of driver (i, ii or iii) does not affect the relationship between the nozzle velocity
and cavity pressure
, only the relationship between input power and diaphragm motion. Hence, a general reduced-order model (ROM) will incorporate a so-called ‘fluidic model’ relating
to
which does not depend on the actuator type, and a ‘driver model’ relating driver input to diaphragm deflection,
. The cavity pressure
is the physical linking variable between both parts of the model.
Table 1 gives an overview of different types of actuators, orifices, and SJA operating conditions for a selection of experimental studies in the scientific literature. The list is not exhaustive, since the purpose is merely to convey the range of actuator types and typical parameter ranges encountered. The final table entry represents the current study.
The objectives of this paper are threefold: (i) to provide a clear but concise overview of an analytical ROM for a generic SJA, which would be useful both for early stage design and for controlling SJA operation; (ii) to validate this ROM for a typical lab-scale SJA with rectangular orifice, using both experimental calibration data as well as 2D and 3D transient CFD simulation results; (iii) to compare CFD and experimental results and illustrate the potential challenges associated with the comparison of 2D and 3D geometries for SJA in the frequency domain.
2. Analytical Reduced-Order Model (ROM)
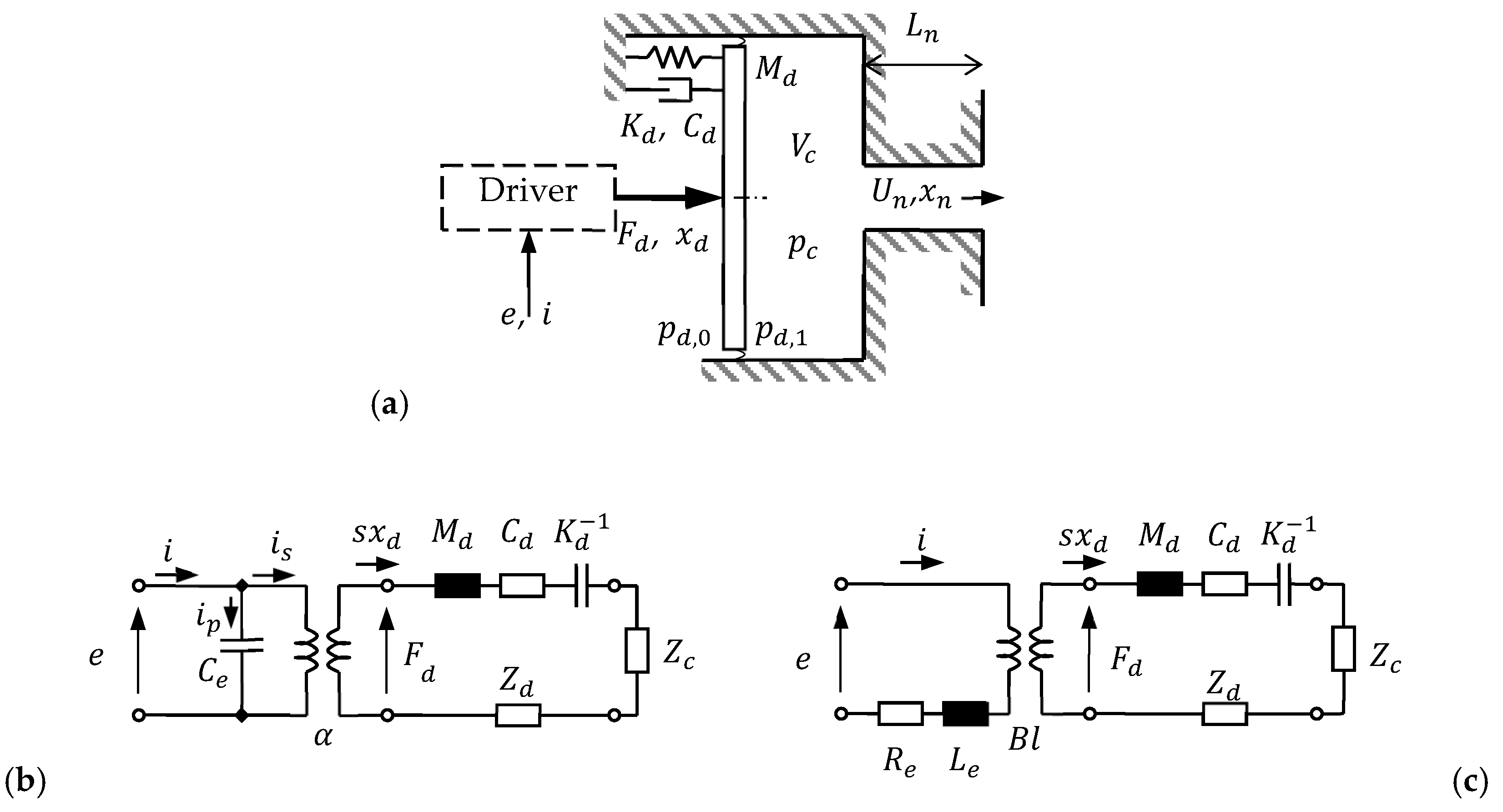
The SJA ROM used in this paper is a lumped parameter analytical model, combining (i) a second-order equivalent representation of the driving element (i.e., a piezoelectric diaphragm or a loudspeaker) with (ii) a zeroth-order gas dynamics approximation of the fluid motion in the orifice, with fluid compressibility in the cavity. The main mechanical degrees of freedom represent the motion of the diaphragm and fluid slug in the nozzle , respectively.
The overall system response function can be broken down into its constituent parts as follows:
where
and
are the fluid density and speed of sound,
and
are the cross-section and surface areas of the nozzle and diaphragm, respectively, and
is the electrical impedance of the driver. All variables in bold (
) in Equation (3) represent complex quantities in the frequency domain, dependent on the Laplace variable
which has been omitted in Equation (3) for brevity.
2.1. Brief Description of the ROM
The operational fluidic model
was described by Persoons and O’Donovan [
11] and can be used to estimate the SJA velocity from a measured cavity pressure. It can be simplified to a closed form analytical expression, and thus is easily implemented in a data acquisition or control system, as described in this section. The coupling between the electromechanical driver model and fluidic model is described in full detail by Persoons [
16]. Comparable reduced-order models, also referred to as lumped element models (LEM), are presented and discussed by other researchers [
17,
18,
19,
20,
21]. Thus for the sake of brevity and clarity, only the basic elements are described here and the reader is referred to other works for more details on the derivations of the equations [
11,
16].
Figure 1 shows a schematic diagram and equivalent electrical networks for this ROM with a piezoelectric actuator (
Figure 1b) and electromagnetic (e.g., loudspeaker) actuator (
Figure 1c). The diaphragm and nozzle slug velocities and displacements are related as
and
.
Most parameters can be determined from known dimensions and manufacturer’s specifications for the driver. Only two parameters ( and ) should be determined by calibration: relates to the non-linear nozzle damping and relates to the added nozzle inertia due to acoustic radiation.
The mechanical/fluidic behavior can be described by combining two second-order models, one relating to the oscillating diaphragm and one relating to the compressible gas dynamics:
where
are the equivalent mass, damping and stiffness of the driver,
is the motive force applied by the actuator and
and
are the pressures on either side of the diaphragm, which are governed by acoustic radiation impedances
and the cavity impedance
. Equation (4) can be thus rewritten as:
where
is an electromechanical coupling coefficient. In case of a piezoelectric actuator,
where
is the piezoelectric modulus relating electric field and volumetric extension. This case is represented in
Figure 1b.
In Equation (5), and are the geometric length and cross-sectional area of the nozzle, represents the damping force related to fluid oscillating through the orifice, and the two terms correspond to acoustic impedances on both ends of the nozzle. and are directly related to the aforementioned parameters and , as explained below.
Firstly, the frequency-dependent acoustic radiation impedance
is described in detail by Beranek [
22] for some canonical geometries. Appendix A in Persoons [
16] describes the radiation impedance for a circular and rectangular orifice of aspect ratio
, based on tabulated data by Burnett and Soroka [
23]. A low-frequency approximation for
of this impedance
where
represents a mass of fluid adjacent to one side of the orifice which adds to the oscillating inertia. This approximation thus leads to the introduction of the added mass coefficient
. When applied to both sides of the orifice equally, this can be recast into an equivalent (end-corrected) nozzle length
:
With the total equivalent (quantities with a prime (‘) indicate the inclusion of an added mass correction) oscillating fluid mass
and the cavity compressibility
where
is the cavity volume, the Helmholtz resonance frequency emerges from the Equation:
Secondly, the nozzle damping force
can be represented by a combination of first-order (viscous) and second-order (inertial) damping. The relative dominance of first or second-order damping depends on the Stokes number (
); however, for short nozzles and moderate frequencies the first-order term can typically be ignored [
16], leaving only:
Equation (5) can thus be recast as the non-linear cavity impedance
relating SJA cavity pressure to orifice velocity:
The reciprocal of
in Equation (10) describes the operational SJA model
in the frequency domain. Appendix C in Persoons [
16] explains how this expression can be simplified for sine wave actuation to the following closed-form expression to estimate the nozzle velocity amplitude
from the cavity pressure amplitude
:
Using a microphone, the cavity pressure amplitude
can easily be measured [
11,
16] and Equation (11) thus allows for
to be directly calculated, once values for
and
are known for the orifice. The following section describes the procedure for determining these parameters.
Other useful expressions relating nozzle velocity to diaphragm deflection
and actuator voltage
can be derived from the above set of equations. The reader is referred to Persoons [
16] for the full derivation. The following relates nozzle velocity
to diaphragm deflection
:
Based on derivations in Persoons [
16], the relationship between nozzle velocity
and piezoelectric actuator voltage
is given by:
For an electromagnetic actuator (see
Figure 1c), a similar expression can be obtained [
16]:
where
and
are the voice coil resistance and inductance, respectively,
is the electromagnetic force factor (
), and
.
Equations (12)–(14) are only provided here in complex notation, yet these can easily be implemented in a data acquisition software such as NI LabVIEW or MATLAB (sample code is available upon request from the corresponding author (Tim Persoons)) to infer the amplitude and phase lag of as a function of either or .
The two system resonance frequencies
and
are related to, but not equal to, the Helmholtz resonance frequency
and driver resonance frequency
, and are determined as:
The equivalent diaphragm mass appears here in its modified form [
16], including an added mass correction on one side of the diaphragm,
.
Persoons [
16] gives more details about the physical interpretation of
and
, and further confirmation for these resonance frequencies can also be found in Gallas et al. [
18], Kordik et al. [
19] and Kooijman and Ouweltjes [
24].
2.2. Estimating ROM Parameters and
The non-linear damping coefficient
and added mass coefficient
can be determined by least-squares fitting the model expression in a calibration procedure, as described by Persoons [
16]. This will tend to over predict
as the fit includes acoustic effects from the diaphragm, which are only implicitly included in the ROM while only the acoustic effects at the nozzle are explicitly used. Alternatively,
can be determined analytically, as described below.
As mentioned in the brief description of the SJA ROM,
arises from acoustic radiation impedance and affects the inertia of the nozzle in the same manner that adding additional mass would. For a rectangular nozzle, such as the one used in this work, acoustic impedance can be interpolated from the tabulated data given by Burnett and Soroka [
23] or analytically determined from the equation provided therein [
23] and reproduced below. For a circular nozzle, the acoustic impedance can be determined by using a Struve H function of the first kind [
16]. For a rectangular nozzle,
can be determined as a function of frequency and aspect ratio
as follows:
where
is the imaginary part of the acoustic impedance and
is the wave number (
) which is normalized by the nozzle cross-sectional area as
. The function
can be determined as:
where parameters
and
are defined as
and
, and the function
is defined as:
Note that Equations (16)–(18) for determining
are a low-frequency approximation, and only valid for values of
. Alternatively, the following equation is an empirical fit for
that is valid for
and
, with a mean error of 1.9% and a maximum error of 7.9% for
:
In the limit for infinite aspect ratio (
), the low-frequency approximation of
obtained from Equations (16)–(19) is zero. Thus, for a two-dimensional CFD model with an inherent aspect ratio of infinity,
tends to zero and thus no end correction is needed for a ROM representing that case. In Equation (7), the apparent nozzle length
for a 2D CFD simulation thus reduces to the geometric length
, which is used in
Section 3.3 to explain how to compare the performance of 2D and 3D SJA cavity geometries.
4. Results and Discussion
Table 2 shows an overview of the cases studied in this paper. All cases represent experiments and matching CFD simulations for an SJA with a rectangular orifice, however as specified above, there are inevitable physical differences in the systems, more specifically the 2D CFD geometry having an infinite orifice aspect ratio
, whereas the aspect ratio for the experiments and 3D CFD results is finite (
).
Table 2 also summarizes the velocity-to-pressure ratio values, representing the fluidic SJA model defined in Equation (11). The values are provided in dimensionless form as
, where the amplitudes
and
are obtained from the (i) experiments, (ii) 2D CFD and (iii) 3D CFD simulations, respectively. For each condition, the corresponding reduced-order model value obtained using Equation (11) is also provided in brackets.
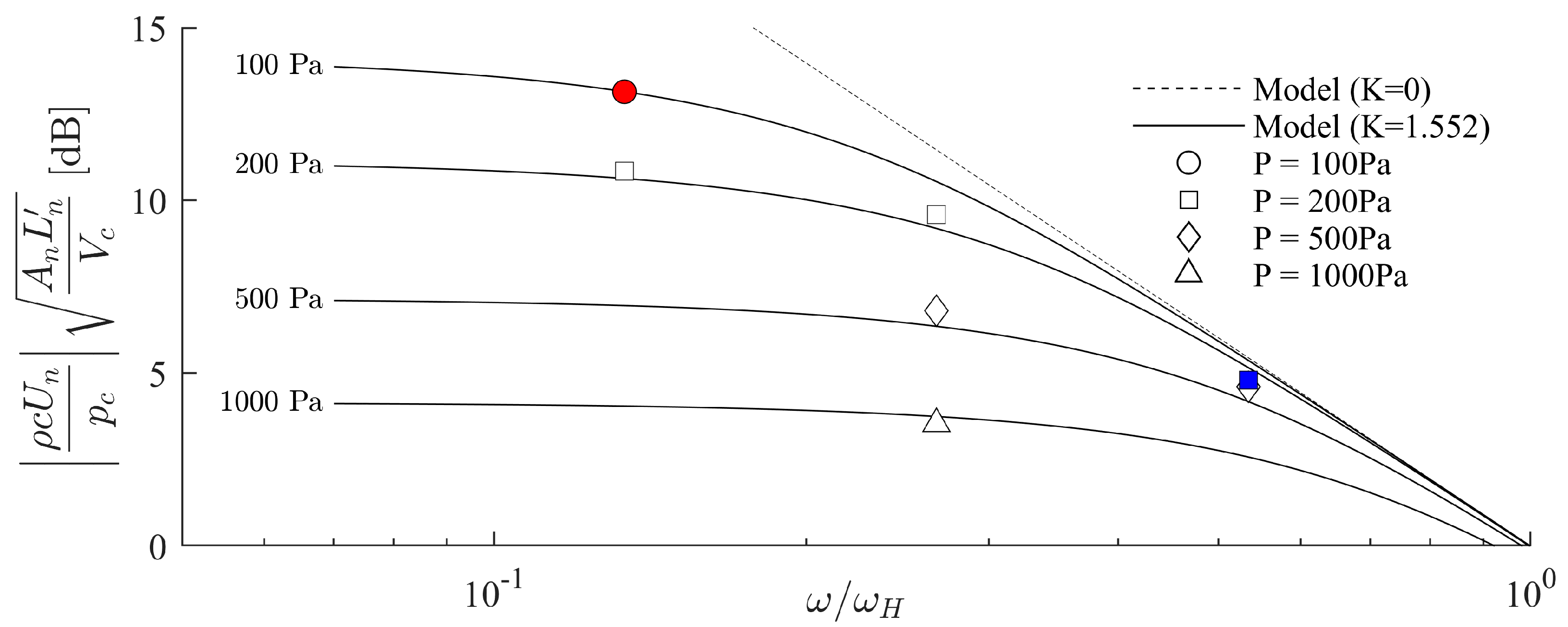
Figure 4 provides a graphical representation of the agreement between the experimental values (markers) and the ROM (solid lines) in terms of the ratio of nozzle velocity to cavity pressure
, referred to as the fluidic model and defined in Equation (11). Because the model is non-linear, four lines are shown for four different cavity pressure amplitudes ranging from 100 Pa to 1000 Pa. The markers represent experimental measurement points at corresponding pressure amplitudes, as listed in
Table 2. Cases A and B (see
Table 2) are indicated with red and blue markers, respectively.
The higher the pressure amplitude, the more the damping term featuring in Equation (11) dominates, and the less sensitive the velocity-to-pressure ratio becomes to frequency. The frequency on the horizontal axis is normalized by the Helmholtz resonance frequency. For frequencies exceeding the Helmholtz resonance by a factor of 3–5, the velocity-to-pressure ratio is no longer quasi constant and increasingly tends towards the dashed line. This represents an undamped model (), corresponding to .
Regarding the procedure for determining the parameters
and
through calibration, this is described in detail in Persoons [
16]. In short, once a given dataset of cavity pressure and nozzle velocity waveforms are provided, whether through experimental measurements or numerical simulations, the amplitudes
and
are determined to calculate the velocity-to-pressure ratio as listed in
Table 2. Then a least-squares fitting procedure is applied to determine
and
such that Equation (11) best fits the experimental or numerically determined ratios. Because of the non-linearity, it is convenient for plotting purposes if the data are taken at predefined cavity pressure amplitudes, which explains why the data in
Table 2 have cavity pressure amplitudes that are approximately 100 Pa, 200 Pa, 500 Pa and 1000 Pa. During the experiments, this can be done by monitoring the cavity pressure microphone readings, although admittedly this is somewhat more cumbersome to achieve for the CFD simulations using the dynamic meshing approach. However, this is merely a small inconvenience from the perspective of plotting results to collapse onto a small number of lines representing Equation (11).
The nozzle velocity, cavity pressure and diaphragm deflection waveforms that were used to determine the amplitudes in
Figure 4 and
Table 2 are shown for two selected cases A and B in
Figure 5 and
Figure 6. These cases are chosen for the following reasons: Case A (red marker in
Figure 4) is relatively low frequency and has a small cavity pressure amplitude (approximately 100 Pa), and thus also a small velocity amplitude, which makes for challenging measurement conditions. Case B (blue marker in
Figure 4) is obtained at a higher frequency closer to the Helmholtz resonance frequency, which makes for increasingly more challenging conditions to obtain reliable convergence of the CFD simulations. Due to the significant computational cost involved in performing transient 3D CFD simulations, only cases A and B were simulated in 3D. 2D CFD simulations were carried out for the entire set of cases.
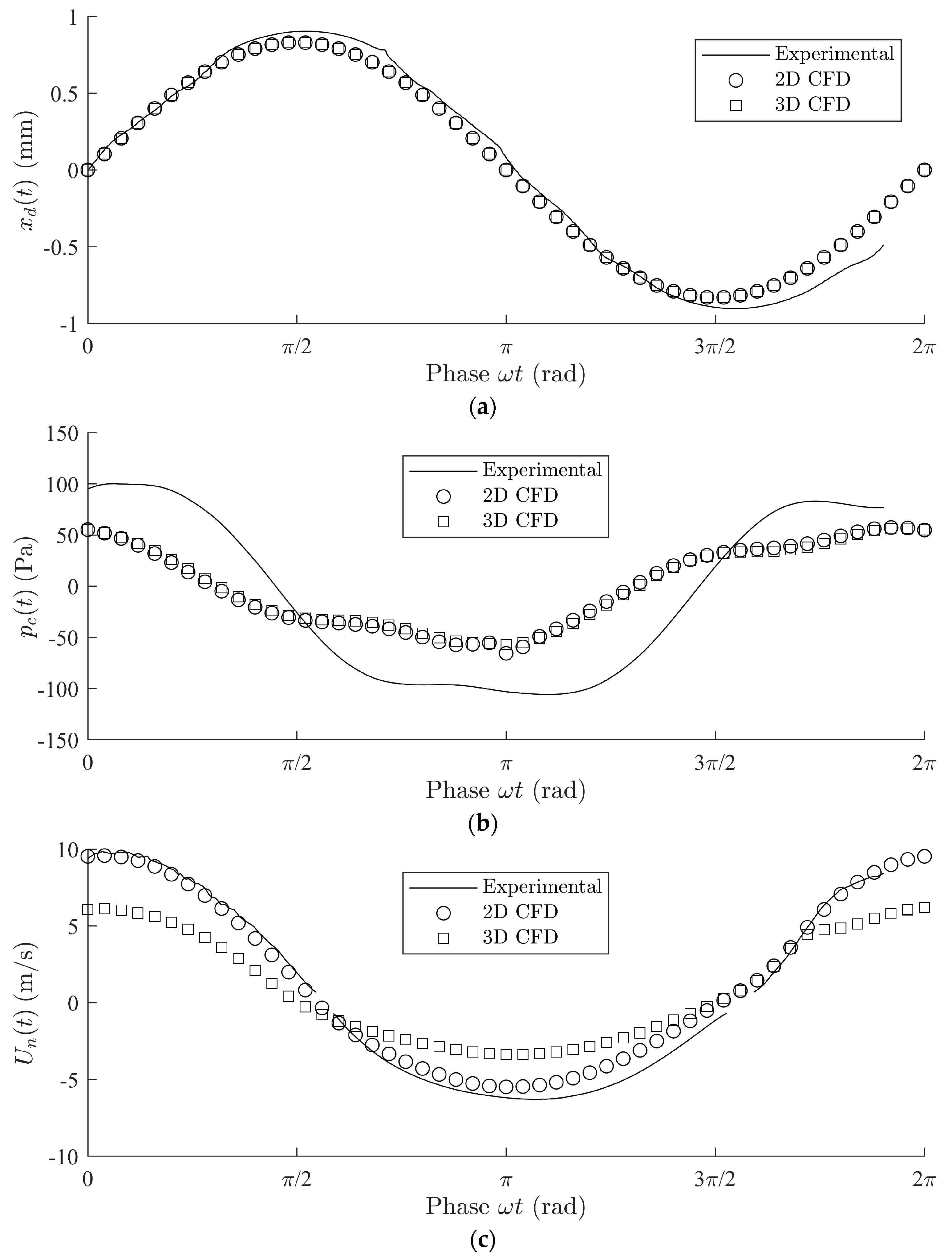
For Case A,
Figure 5 shows plots of the phase-resolved (a) diaphragm deflection
, (b) cavity pressure
and (c) nozzle velocity
determined from experimental measurements, 2D CFD simulations and 3D CFD simulations, where the phase angle is given by
. Phase angle
is arbitrarily chosen as the zero crossing of the diaphragm deflection during the ejection stroke. For the experiments, the waveforms are ensemble-averaged over 16 cycles, as explained in
Section 3.2. For the CFD simulations, the waveforms are extracted after periodic conditions were reached. The threshold for reaching periodicity is defined such that the root-mean-squared deviation on the instantaneous values of velocity and pressure between two successive cycles does not exceed 1%.
Since the diaphragm deflection is a user-defined input in the CFD simulations, perfect sine waveforms are observed for the CFD implementation of
in
Figure 5a. The simulated cavity pressure in
Figure 5b broadly resembles the measured pressure waveform; however, some phase lag can be seen in some of the higher order fluctuations. With respect to the ROM, however, it only considers first order effects and neglects any higher order acoustics, thus these discrepancies are of minor importance in that regard. The difference in pressure magnitude in
Figure 5b between experiments and CFD simulations has been verified to be independent of mesh density, turbulence model, and numerical discretization method. Furthermore, 2D and 3D CFD simulations yield similar pressure amplitudes. However, it is the ratio of velocity to pressure amplitude that matters for the fluidic model validation, not the cavity pressure amplitude itself.
In terms of the nozzle velocity
, it is important to note that the measured velocity is obtained by means of a hot-wire anemometer probe, placed in close proximity to the outlet of the jet nozzle (see
Section 3.2). Because a hot-wire anemometer is insensitive to flow direction, the original velocity waveform is unfolded during the suction stroke to produce the directional velocity waveform shown in
Figure 5a. Furthermore, because of the asymmetry in the near-orifice flow fields for a synthetic jet during ejection and suction, there is a small but significant difference in the positive and negative peak velocity magnitudes during ejection and suction, respectively.
Furthermore, as mentioned in
Section 3.2, the hot-wire measures the approximate centerline nozzle velocity
. Therefore, the velocity at the same location is extracted from the CFD results to provide a fair comparison. In
Figure 5c and 6c, hot-wire readings below the calibration range (<0.6 m/s) are omitted from the graphs.
Overall,
Figure 5c shows a reasonable agreement between the experimental and numerical velocity waveforms, faithfully reproducing a minor peak during the startup of the ejection phase, visible at phase angle
. The difference in magnitude between the experimental and CFD results should be interpreted as follows: although the 2D CFD results show a good agreement with the experiments in terms of velocity, the 2D CFD cavity pressure is underestimated. For the 3D CFD results, the predicted velocity magnitude is smaller yet the ratio of velocity to pressure amplitude is much closer to the experimental data, giving a stronger confirmation of the validity of the fluidic model in Equation (11).
Similar to
Figure 5,
Figure 6 shows the corresponding waveforms for case B at a greater frequency, closer to the Helmholtz resonance frequency. Again, a reasonable general agreement is observed between experimental and numerical data. Because it is approaching the resonance frequency, a significant phase shift is observed for case B between the diaphragm deflection and nozzle velocity, compared to the low frequency case A.
In terms of the 2D CFD simulations, it was found that the results are not particularly sensitive to changes in the modelling approach. Different discretization schemes and turbulence models were used for the 2D CFD simulations during the initial exploratory simulations for this study, and even the 3D CFD simulation results do not appreciably alter the shape of the pressure and velocity waveforms. A notable improvement in the velocity-to-pressure ratio prediction was observed for 3D CFD simulations compared to 2D simulations (see
Figure 5).
Furthermore, it was found that there was no need to match exactly the location of the cavity pressure probe in the CFD pressure field to the location of the microphone used in the experiments. Thus it seems that, at least in first approximation, the physics relating bulk cavity pressure to nozzle velocity can indeed be captured reliably by a reduced-order model.
Figure 7 demonstrates this more clearly by plotting the experimental and numerical values for the velocity-to-pressure ratio on the vertical axis against the corresponding ROM prediction on the horizontal axis. As before, cases A and B are indicated by red and blue markers, respectively, and the other cases listed in
Table 2 are also included (only 2D CFD and experimental data). As mentioned previously, because of the difference in geometry for the 2D versus 3D geometries, different
values are used. In
Figure 7, the ROM predictions corresponding to the experimental and numerical data are produced using Equation (11) with
. For the experimental results,
. For the 3D CFD results,
and for the 2D CFD results,
as explained in
Section 2.2. The reason for the difference in
between the 3D CFD and experimental results can be attributed to the different acoustic radiation impedance boundary conditions; the experiments feature radiation from the rear of the diaphragm, which is not included in the CFD simulation. Furthermore, the far field radiation and reflective properties of the lab environment are difficult to reproduce faithfully in CFD at a reasonable computational cost.
This study has revealed the challenges in reliably matching up experimental and numerical conditions for this type of phenomenon. Further research including more detailed pressure and velocity field quantification will be required to fully understand these aspects.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}