
Dynamics Modeling and Control Method for Non-Cooperative Target Capture with a Space Netted Pocket System


Abstract
1. Introduction
2. Dynamic Modeling of the Space Netted Pocket System
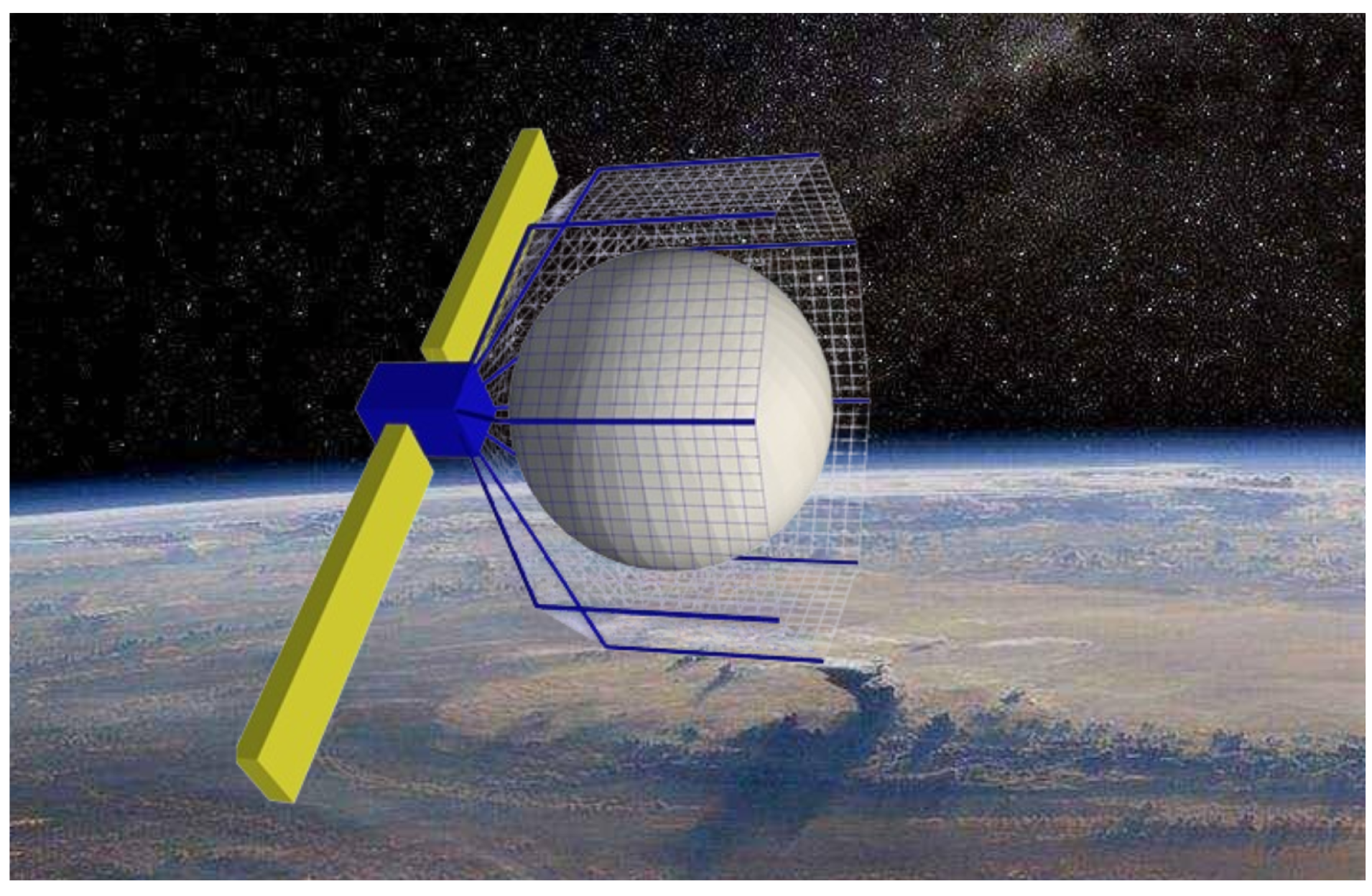
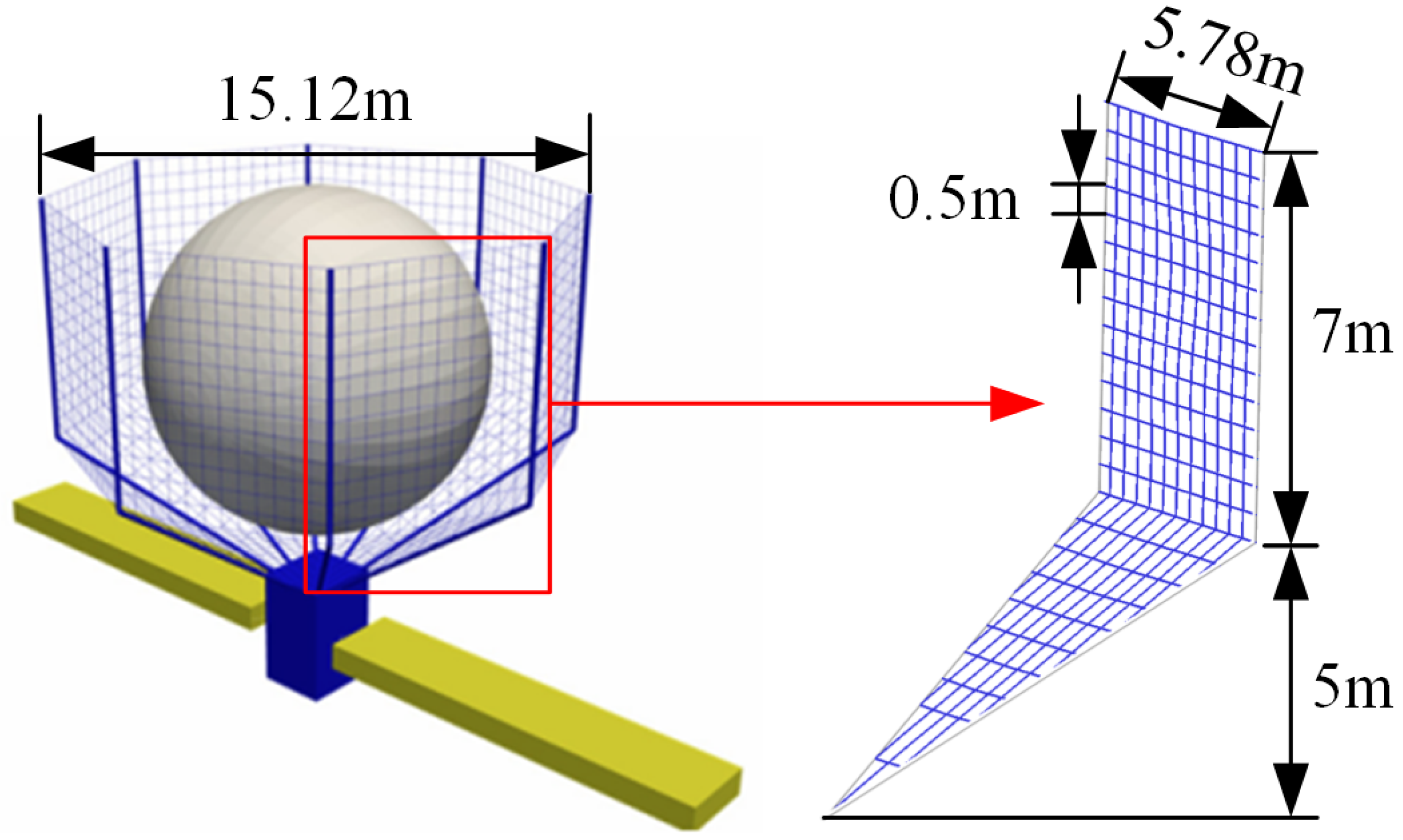
2.1. Structure of the Netted Pocket Capture System
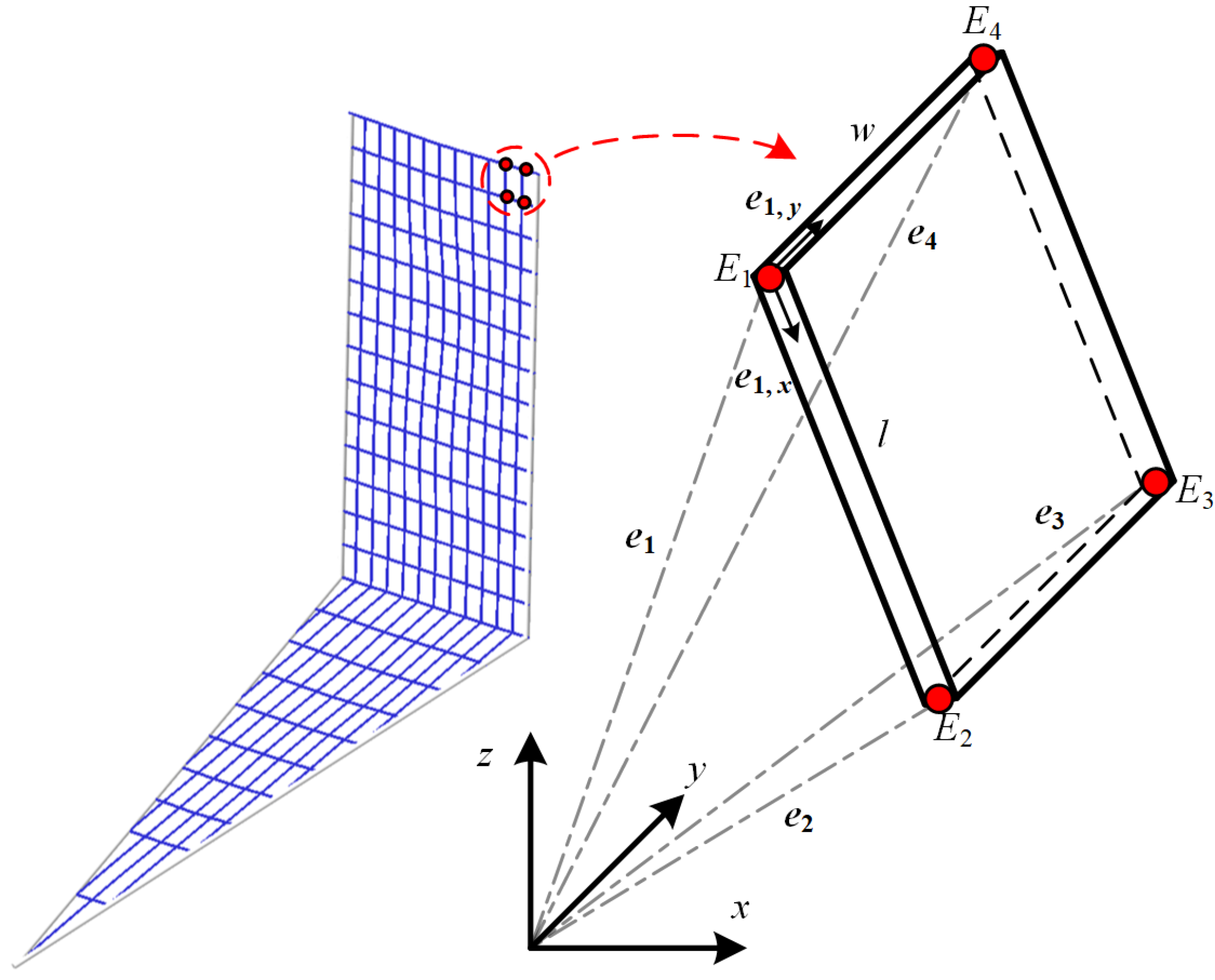
2.2. Dynamics Model of the Rope Net
2.3. Collision and Friction Force Modeling
2.3.1. Collision Force Modeling
- (1)
- Normal Elastic Component
- (2)
- Nonlinear Damping Component
2.3.2. Friction Force Modeling
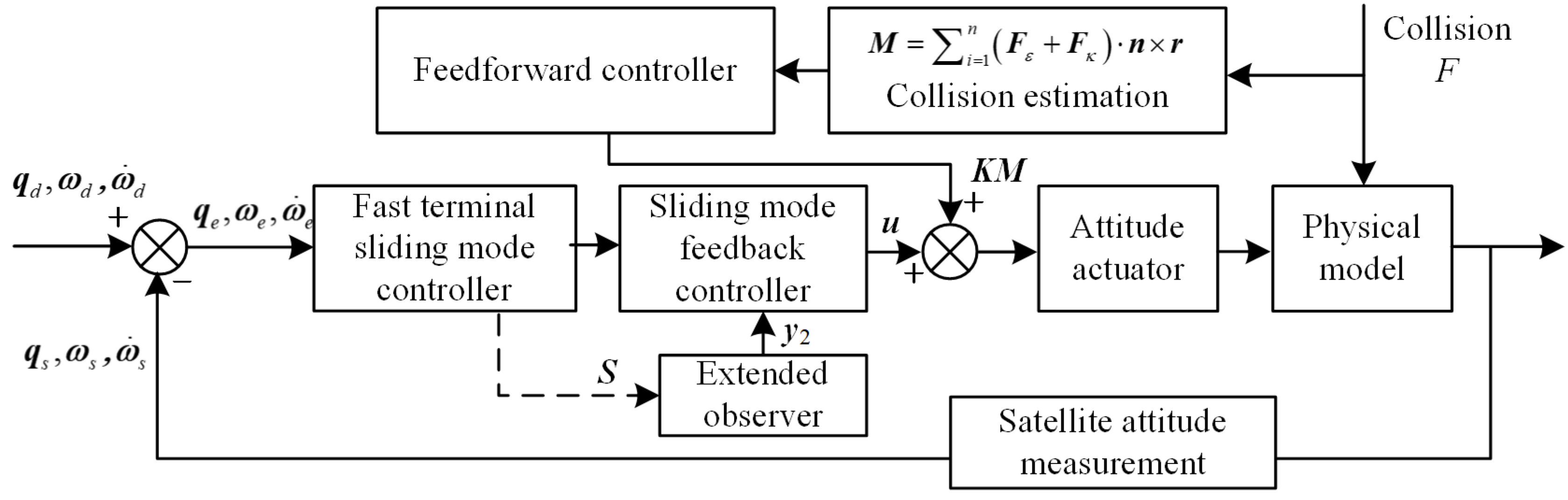
3. Design of a Collision Feedforward Sliding Mode Capture Controller
4. Dynamic Simulation Results and Analysis
4.1. Dynamic Simulation and Analysis of Escaping Target Capture
4.2. Dynamic Simulation and Analysis of Spinning Target Capture
5. Conclusions
- (1)
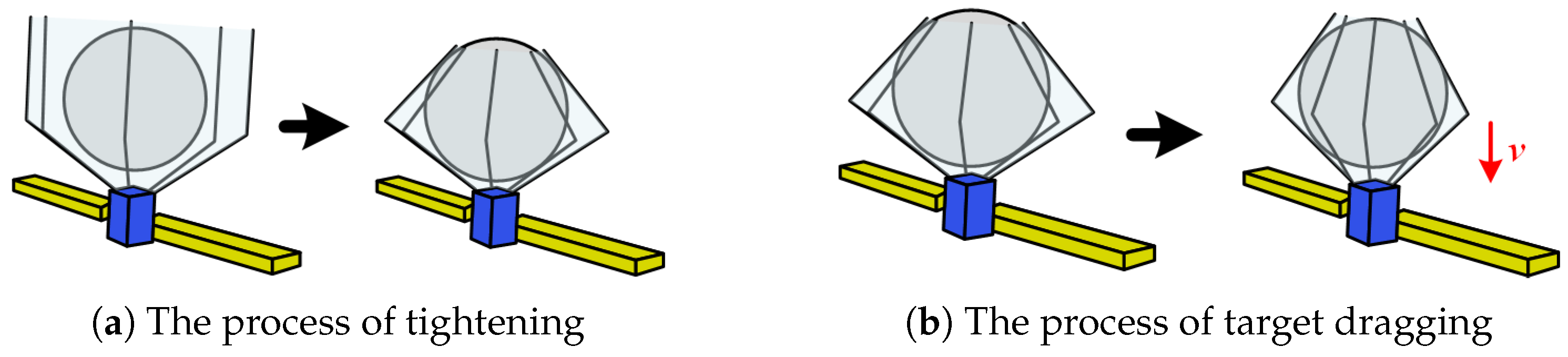
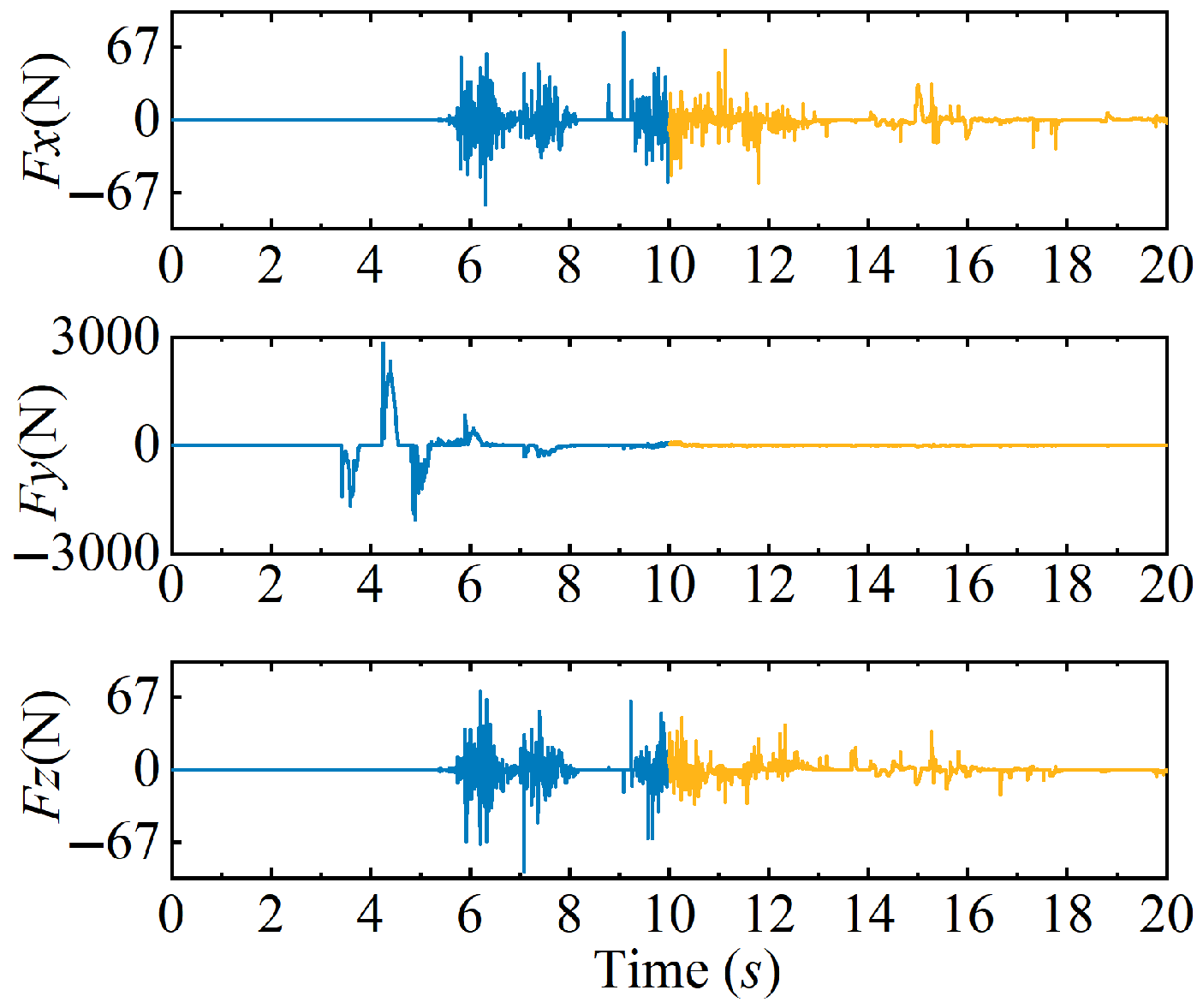
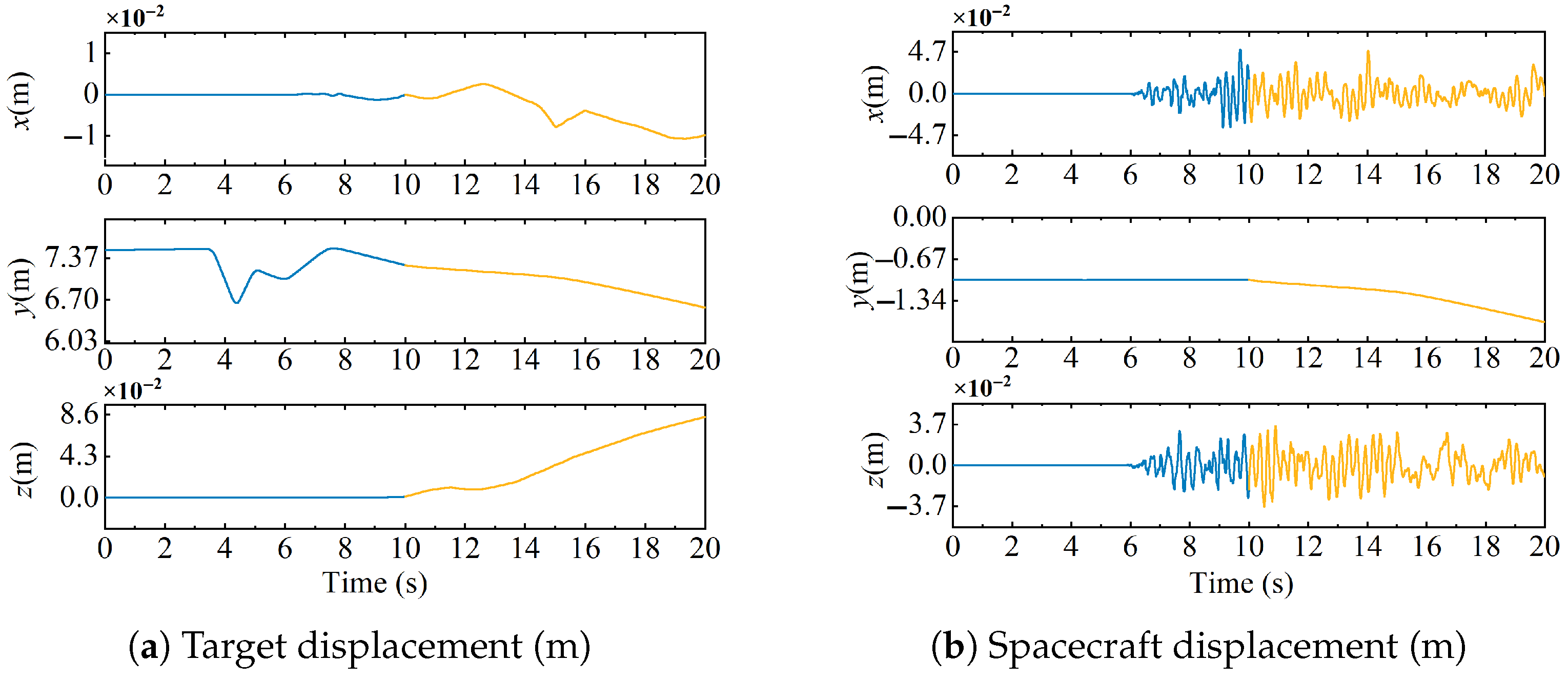
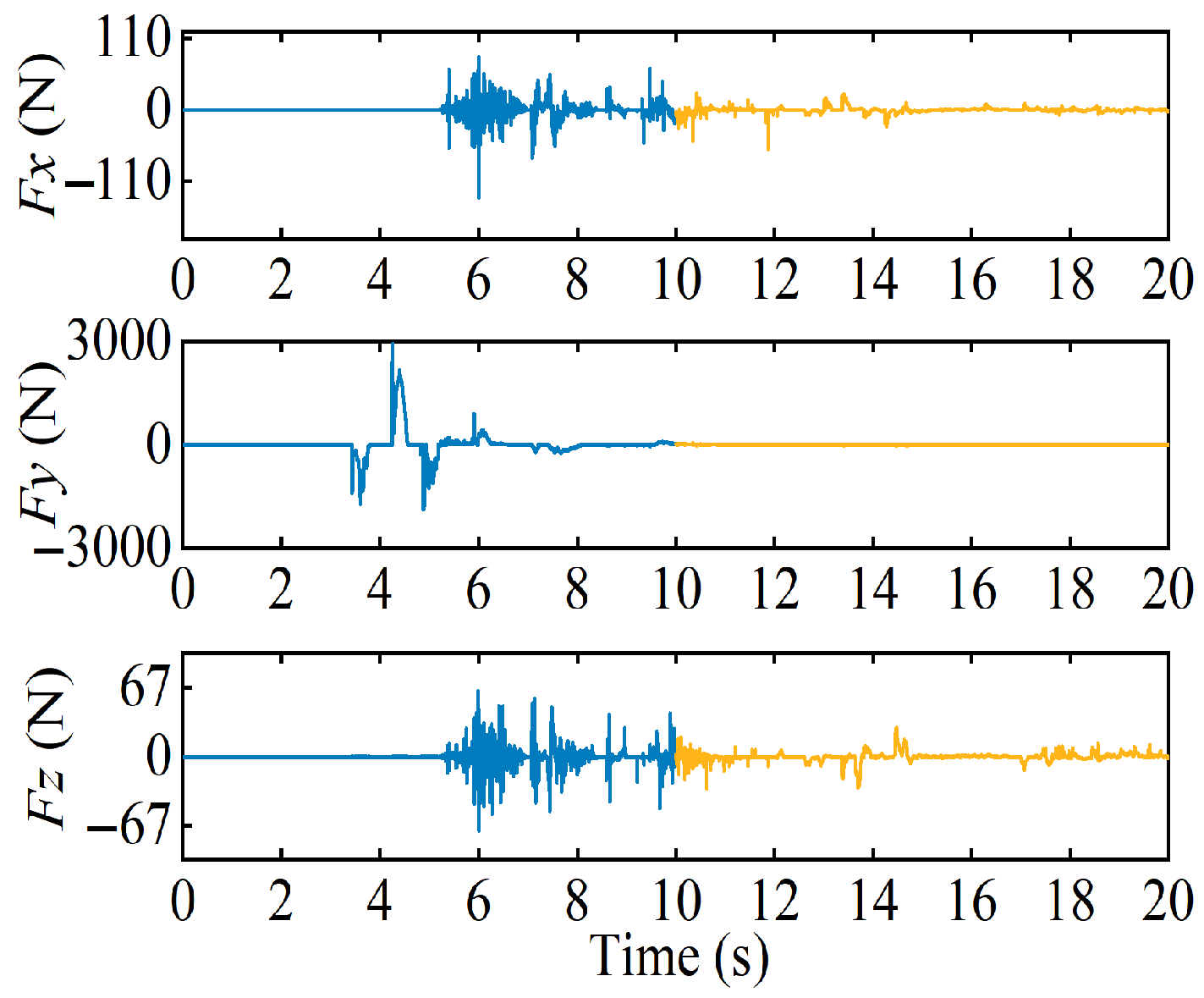
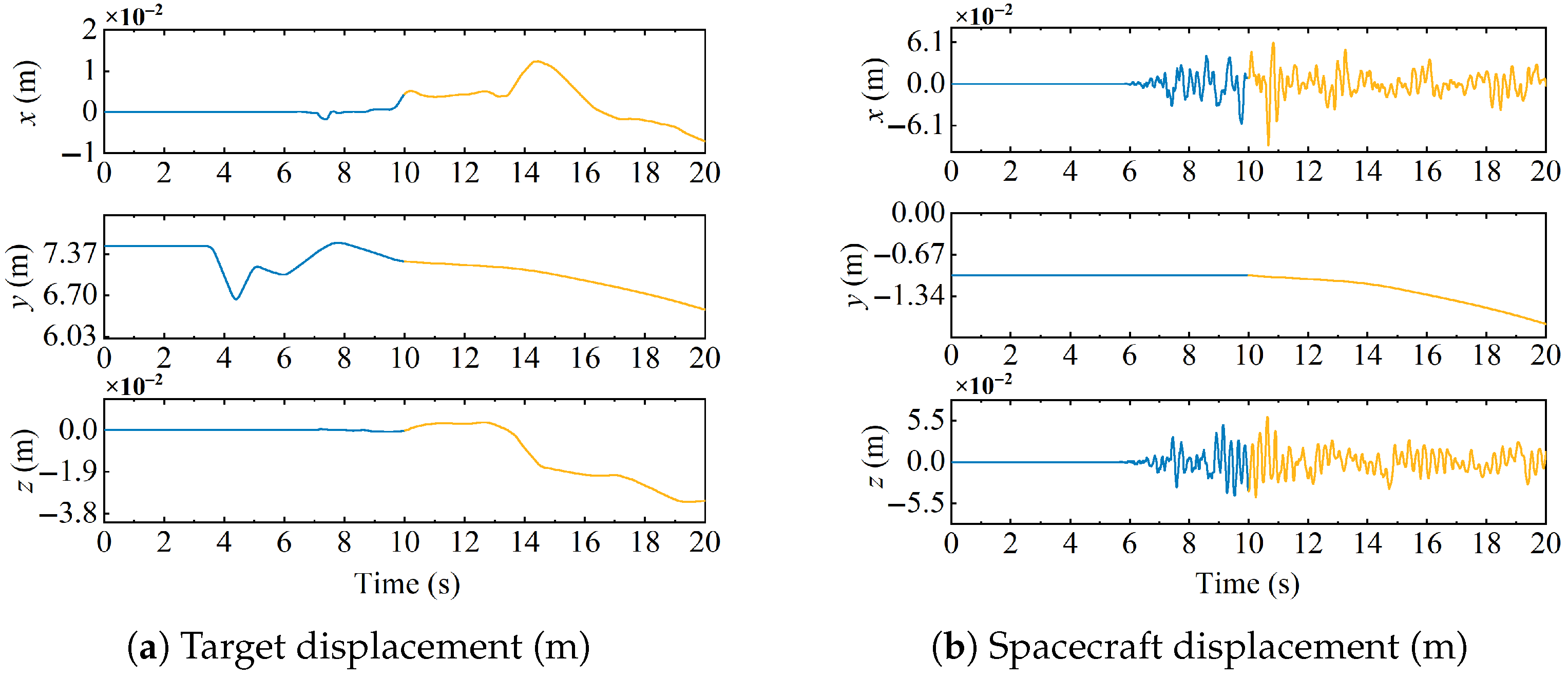
- For targets in escape and rotating states, the spacecraft’s attitude variation is less than deg throughout the capture process, demonstrating that the proposed control method can ensure the spacecraft’s attitude stability during capture. During the capture phase, the spacecraft’s position does not experience significant deviation under the influence of the collision force, proving that the method can effectively compensate for disturbances from instantaneous impacts. In the towing phase, the target’s center of mass moves with the spacecraft, and the collision force amplitude is less than 100 N, while the spacecraft’s position and attitude amplitudes are less than m and deg, demonstrating that the target and spacecraft’s position and attitude are in a relatively stable state after capture, thus proving that the method can achieve stable capture of moving targets.
- (2)
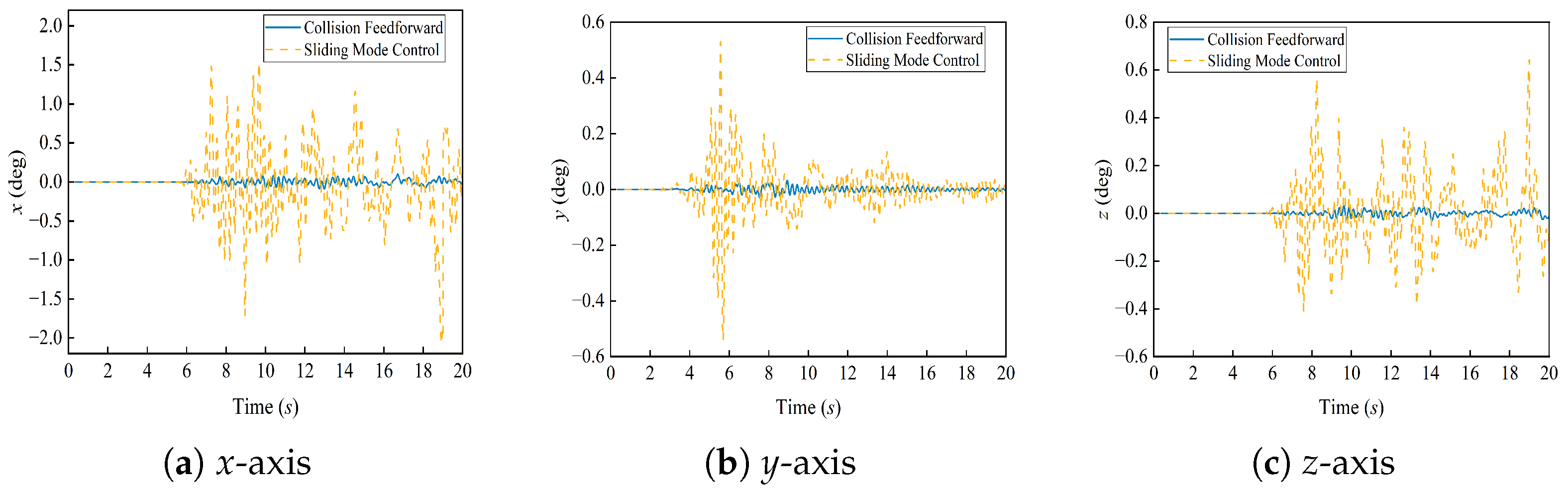
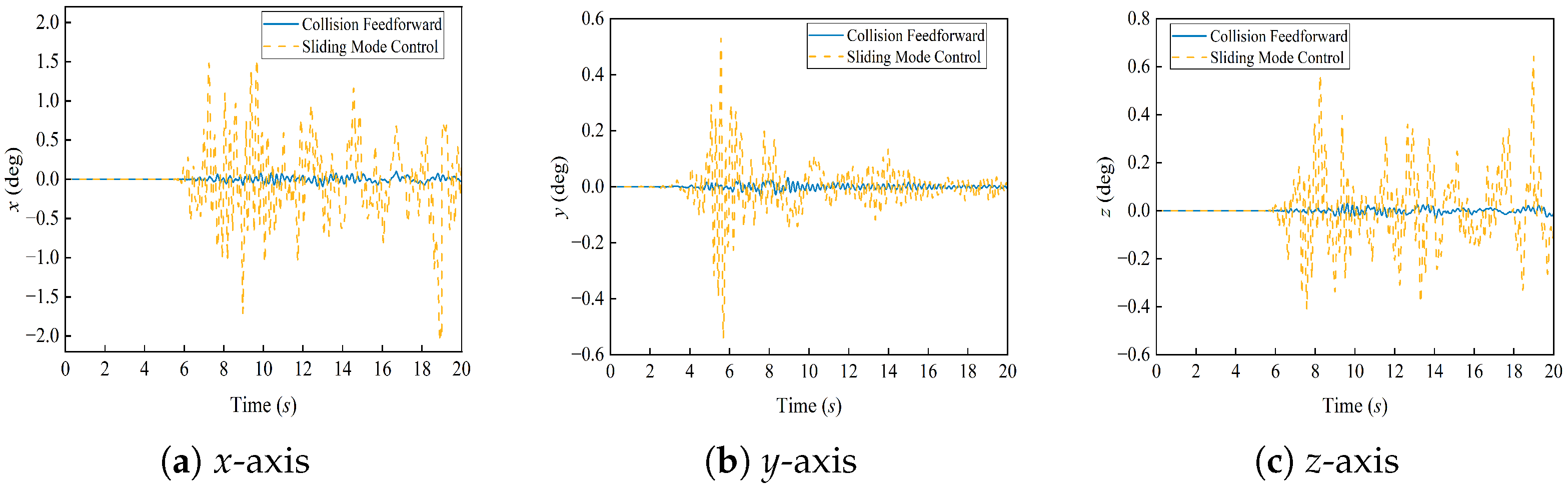
- The simulation results indicate that, during the target capture stage, the attitude change amplitude at the moment of impact is reduced by a factor of ten compared to the standard sliding mode control. This demonstrates that the model-based collision estimation feedforward control effectively mitigates the transient impact disturbances caused by the collision event. Furthermore, during the towing phase, the designed controller successfully maintains the spacecraft’s position and attitude jitter within a range of , thus confirming that our control method significantly enhances attitude stability during the capture of spherical debris. These findings validate the effectiveness of our approach.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Notations | Notations explanation |
| Mass matrix | |
| Generalized coordinates | |
| Position vector | |
| Shape function | |
| Strain tensor | |
| Elastic tensor | |
| Generalized force | |
| Lagrange multiplier | |
| Contact stiffness coefficient | |
| Contact damping coefficient; | |
| Normal penetration depth | |
| R | Radius of curvature |
| Deviation angular velocity | |
| sig | Sign function |
| Sliding surface coefficients | |
| Desired quaternion | |
| Deviation quaternion | |
| Sign function coefficients | |
| Dirichlet function | |
| I | Identity matrix |
| t | Time |
| Spacecraft inertia | |
| Attitude rotation matrix | |
| Known state of the system, | |
| Unknown state of the system | |
| Spacecraft control torque | |
| , , | observation gains |
| , | Sign function coefficients |
| Prediction coefficient |
References
- Adilov, N.; Braun, V.; Alexander, P.; Cunningham, B. An estimate of expected economic losses from satellite collisions with orbital debris. J. Space Saf. Eng. 2023, 10, 66–69. [Google Scholar] [CrossRef]
- Raina, D.; Gora, S.; Maheshwari, D.; Shah, S.V. Impact modeling and reactionless control for post-capturing and maneuvering of orbiting objects using a multi-arm space robot. Acta Astronaut. 2021, 182, 21–36. [Google Scholar] [CrossRef]
- Dal, P.N.; Shah, S.V. Joint acceleration based adaptive reactionless manipulation of closed-loop multi-arm space robot in post-capture phase. Acta Astronaut. 2025, 226, 439–457. [Google Scholar] [CrossRef]
- Yu, B.; Wen, H.; Jin, D. Review of deployment technology for tethered satellite systems. Acta Mech. Sin. 2018, 34, 755–768. [Google Scholar] [CrossRef]
- Zhao, Y.; Huang, P.; Zhang, F. Dynamic modeling and super-twisting sliding mode control for tethered space robot. Acta Astronaut. 2018, 143, 310–321. [Google Scholar] [CrossRef]
- Jang, M.; Shin, H.C.; Sim, C.H. Active debris removal simulations using spider-web space-nets for KITSAT-1 satellite. Int. J. Aeronaut. Space Sci. 2023, 24, 1311–1322. [Google Scholar] [CrossRef]
- Wang, B.; Meng, Z.; Jia, C.; Huang, P. Anti-tangle control of tethered space robots using linear motion of tether offset. Aerosp. Sci. Technol. 2019, 89, 164–174. [Google Scholar] [CrossRef]
- Endo, Y.; Kojima, H.; Trivailo, P.M. New formulation for evaluating status of space debris capture using tether-net. Adv. Space Res. 2022, 70, 2976–3002. [Google Scholar] [CrossRef]
- Juillard, M.; Kneib, J. Simulation tool: Resources management in high performance avionic for ADR missions. In Proceedings of the 2021 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2021. [Google Scholar]
- Biesbroek, R.; Aziz, S.; Wolahan, A.; Cipolla, S.F.; Richard-Noca, M.; Piguet, L. The Clearspace-1 mission: ESA and clearspace team up to remove debris. In Proceedings of the 8th European Conference on Space Debris (Virtual), Darmstadt, Germany, 20–23 April 2021. [Google Scholar]
- Tang, C.; Deng, Y.Q.; Bai, Z.F.; Wei, C.; Zhao, Y. Dynamics analysis of space netted pocket system capturing non-cooperative target. Appl. Sci. 2023, 13, 10377. [Google Scholar] [CrossRef]
- Wang, R.; Liu, X.; Ji, R.; Cai, G.; Xu, F. Compliance resistance collision control for operating a space robot to capture a non-cooperative spacecraft. Aerosp. Sci. Technol. 2024, 153, 109425. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, C. Reinforcement Learning-Based Pose Coordination Planning Capture Strategy for Space Non-Cooperative Targets. Aerospace 2024, 11, 706. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, H.; Wang, W.; Qi, C.; Xu, J.; Zhao, Y.; Ma, C.; Tian, J. Research on Spatial Developable Mechanism Considering Revolute Clearance Joints with Irregular Rough Surfaces. Actuators 2024, 13, 274. [Google Scholar] [CrossRef]
- Qi, C.; Peng, S.; Zhang, H.; Li, W.; Dai, S.; Luo, M. Hybrid model of deep learning and contact theory for predicting distributed contact force in space debris de-tumbling. Measurement 2025, 253, 117767. [Google Scholar] [CrossRef]
- Zhang, H.; Guo, J.; Liu, J.; Ren, G. An efficient multibody dynamic model of arresting cable systems based on ALE formulation. Mech. Mach. Theory 2020, 151, 103892. [Google Scholar] [CrossRef]
- Shan, M.; Guo, J.; Gill, E. An analysis of the flexibility modeling of a net for space debris removal. ScienceDirect 2020, 65, 1084–1094. [Google Scholar] [CrossRef]
- Chang, R.; Jia, Q.; Chu, M. Stabilization control for spacecraft-manipulator system after capturing tumbling target. Int. J. Control Autom. Syst. 2022, 20, 3706–3717. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, F.; Huang, P. Capture dynamics and control of tethered space net robot for space debris capturing in unideal capture case. J. Frankl. Inst. 2020, 357, 12019–12036. [Google Scholar] [CrossRef]
- Zhao, Y.; Huang, P.; Zhang, F. Contact dynamic modeling and control for tethered space net robot with asymmetric net configuration. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 918–929. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, F.; Huang, P.; Liu, X. Impulsive super-twisting sliding mode control for space debris capturing via tethered space net robot. IEEE Trans. Ind. Electron. 2020, 67, 6875–6882. [Google Scholar] [CrossRef]
- Zhang, Y.; Feng, R.; Yu, Y.; Liu, J.; Baoyin, H. Asteroid capture dynamics and control using a large-scale flexible net. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4034–4043. [Google Scholar] [CrossRef]
- Han, D.; Liu, Z.; Huang, P. Capture and detumble of a non-cooperative target without a specific gripping point by a dual-arm space robot. ScienceDirect 2022, 69, 3770–3784. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, C.; Yue, X. NI-based static output feedback control for attitude stabilization of post-capture flexible spacecraft. Adv. Space Res. 2023, 71, 3681–3695. [Google Scholar] [CrossRef]
- Tang, C.; Yao, J.M.; Liang, L.; Zhang, H.; Wei, C.; Zhao, Y. IEstimation of full dynamic parameters of large space debris based on rope net flexible collision and vision. Actuators 2023, 12, 344. [Google Scholar] [CrossRef]
- Anjum, M.; Khan, Q.; Ullah, S.; Hafeez, G.; Fida, A.; Iqbal, J.; Albogamy, F.R. Maximum power extraction from a standalone photo voltaic system via neuro-adaptive arbitrary order sliding mode control strategy with high gain differentiation. Appl. Sci. 2022, 12, 2773. [Google Scholar] [CrossRef]
- Hong, Y.; Huang, J.; Xu, Y. On an output feedback finite-time stabilization problem. IEEE Trans. Autom. Control 2001, 46, 306–309. [Google Scholar]
- Zhang, L.; Xia, Y.; Shen, G.; Cui, B. Fixed-time attitude tracking control for spacecraft based on a fixed-time extended state observer. Sci. China Inf. Sci. 2021, 64, 150–166. [Google Scholar] [CrossRef]
- Huang, Z.; Tang, C.; Yu, Q.; Khaliel, M.S.S.; Wei, C. Dynamics and FNTSM control of spacecraft with a film capture pocket system. Space Sci. Technol. 2024, 3, 79. [Google Scholar] [CrossRef]
- Qi, R.; Zhang, Y.; Jiang, H.; Zhong, R. Dynamic analysis of tethered defunct satellites with solar panels. Astrodynamics 2024, 8, 297–309. [Google Scholar] [CrossRef]
- Kucharski, D.; Kirchner, G.; Koidl, F.; Fan, C.; Carman, R.; Moore, C.; Dmytrotsa, A.; Ploner, M.; Bianco, G.; Medvedskij, M.; et al. Attitude and spin period of space debris envisat measured by satellite laser ranging. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7651–7657. [Google Scholar] [CrossRef]
- Anz-Meador, P.; Opiela, J.; Shoots, D.; Liou, J.-C. History of On-Orbit Satellite Fragmentations, 15th ed.; NASA Orbital Debris Program Office: Houston, TX, USA, 2018; pp. 1–10. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller Name | Parameters |
|---|---|
| Feedforward controller | = [1,1,1] |
| Sliding mode controller parameters | = 10, = 2, = 11/5, = 11/19, = 4, = 2, = 7.5, = 15 |
| Extended observer parameters | = 0.99, = 1.01, = 11/5, = 11/19 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Zhang, H.; Yao, J.; Li, W.; Huang, Z.; Tang, C.; Zhao, Y. Dynamics Modeling and Control Method for Non-Cooperative Target Capture with a Space Netted Pocket System. Actuators 2025, 14, 358. https://doi.org/10.3390/act14070358
Wang W, Zhang H, Yao J, Li W, Huang Z, Tang C, Zhao Y. Dynamics Modeling and Control Method for Non-Cooperative Target Capture with a Space Netted Pocket System. Actuators. 2025; 14(7):358. https://doi.org/10.3390/act14070358
Chicago/Turabian StyleWang, Wenyu, Huibo Zhang, Jinming Yao, Wenbo Li, Zhuoran Huang, Chao Tang, and Yang Zhao. 2025. "Dynamics Modeling and Control Method for Non-Cooperative Target Capture with a Space Netted Pocket System" Actuators 14, no. 7: 358. https://doi.org/10.3390/act14070358
APA StyleWang, W., Zhang, H., Yao, J., Li, W., Huang, Z., Tang, C., & Zhao, Y. (2025). Dynamics Modeling and Control Method for Non-Cooperative Target Capture with a Space Netted Pocket System. Actuators, 14(7), 358. https://doi.org/10.3390/act14070358