
Design and Validation of an Ambulatory User Support Gait Rehabilitation Robot: NIMBLE

 , , , , ,
, , , , ,  and
and
Abstract
1. Introduction
1.1. Context, Advantages and Drawbacks of Robotic Gait Rehabilitation
1.2. Current State and Limitations of Robotic Gait Training Devices
1.3. Objective and Scope of the Study
2. Materials and Methods
2.1. NIMBLE Robot
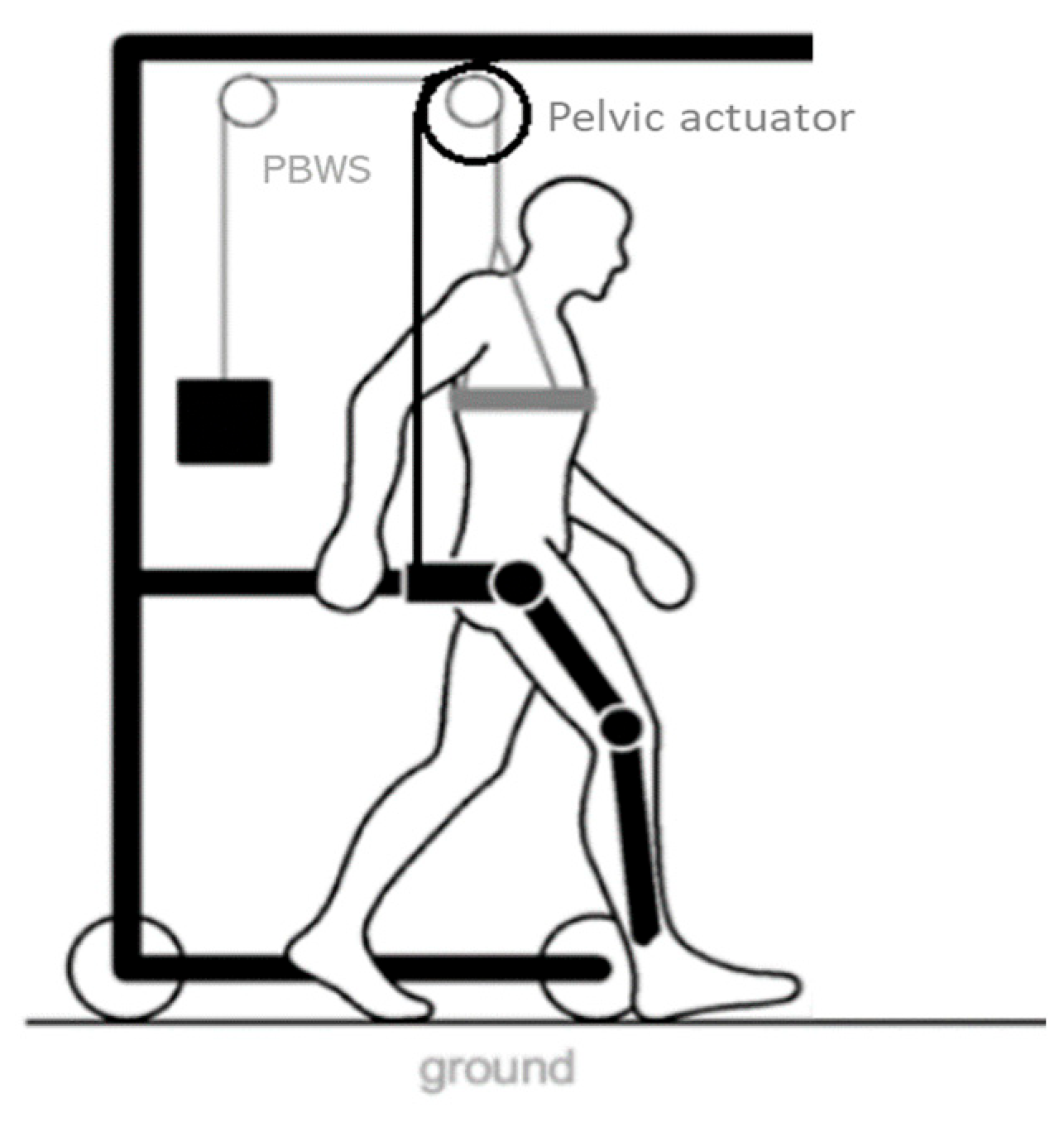
- To provide partial unloading of the bodyweight of the patient. This will eliminate the need for technical aids while allowing severe patients to train. A chest harness worn by the patient is connected to a manual lever at the top of the frame via a high-tension elastic band to adjust the weight unloaded and providing freedom to the CoM to shift.
- To provide a mechanical reference for the patient. The robotic frame must track the position of the patient throughout the therapy and move forward maintaining the alignment and ensuring safety and stability.
- To allow for pelvic movements and the translation of the CoM in the frontal plane of the user. The system must allow for the vertical and horizontal translation of the CoM and pelvic list in order to not disturb the gait. The CoM translation in a non-pathological gait is around 5 cm in both vertical and horizontal directions [40,41], whereas in a pathological gait there are several variants [42].
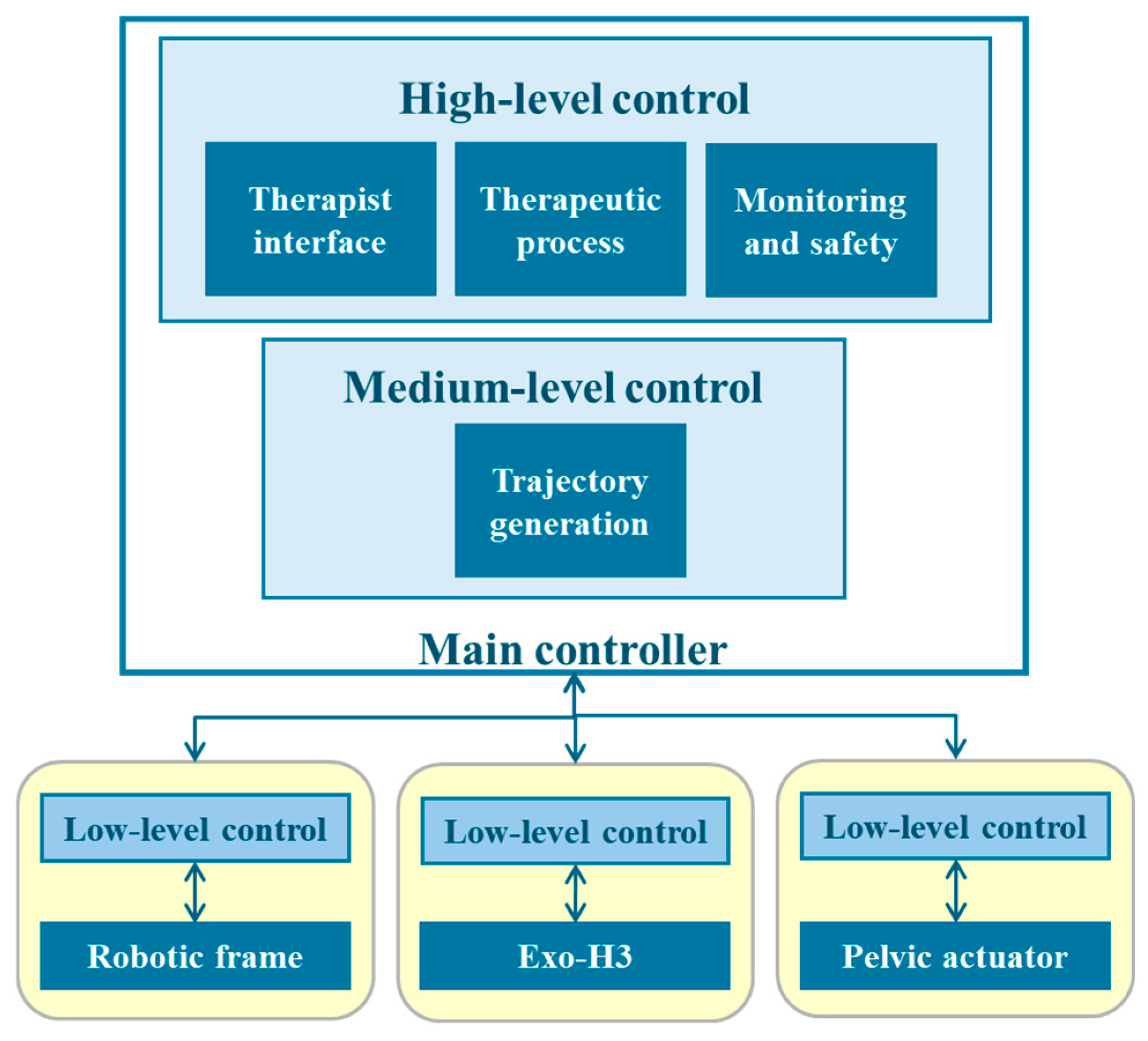
2.2. Robotic Frame Control
2.3. Experimental Validation
2.3.1. Study Design and Variables
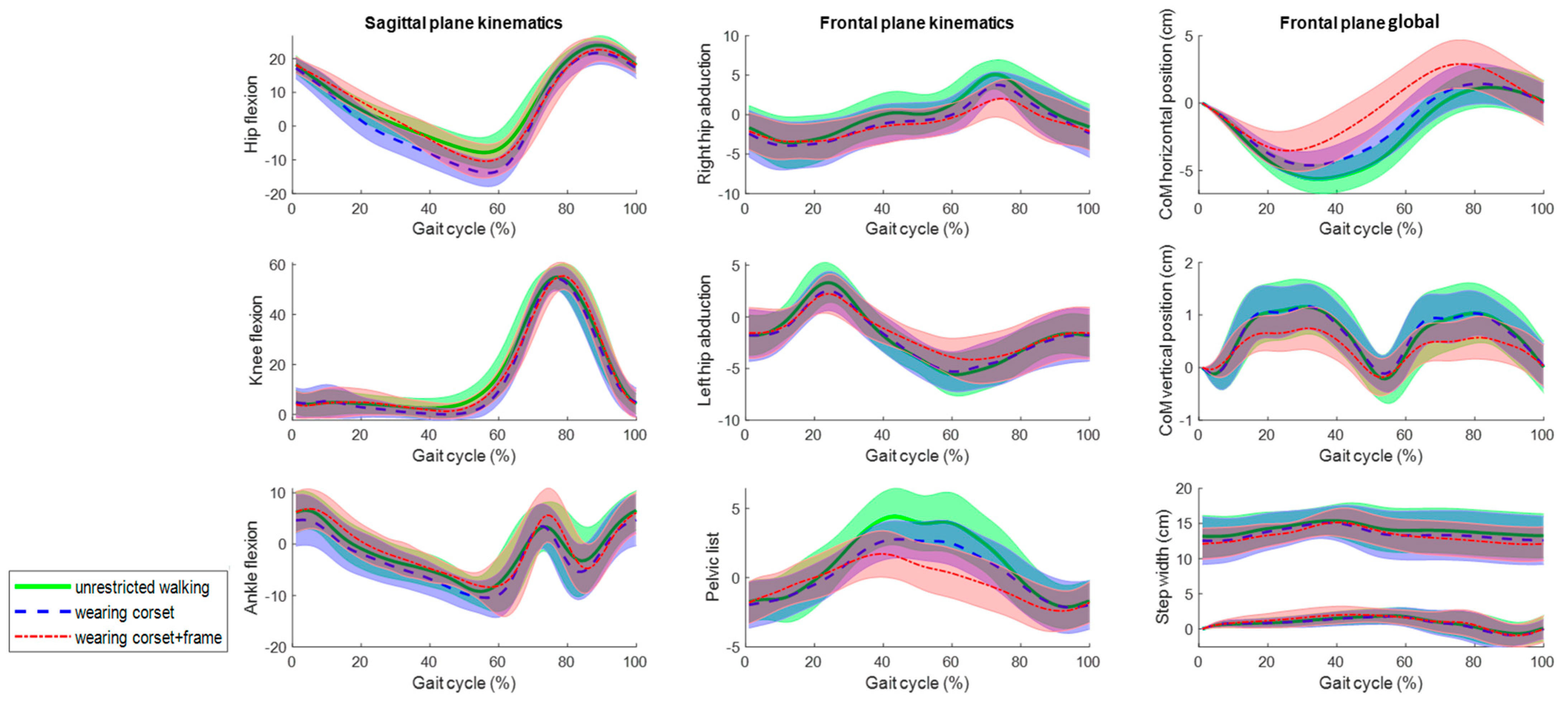
- The exoskeleton–frame mechanism has a limited influence on walking kinematics.
- The frame control can maintain exoskeleton–frame alignment during treatment.
2.3.2. Instrumentation and Data Processing
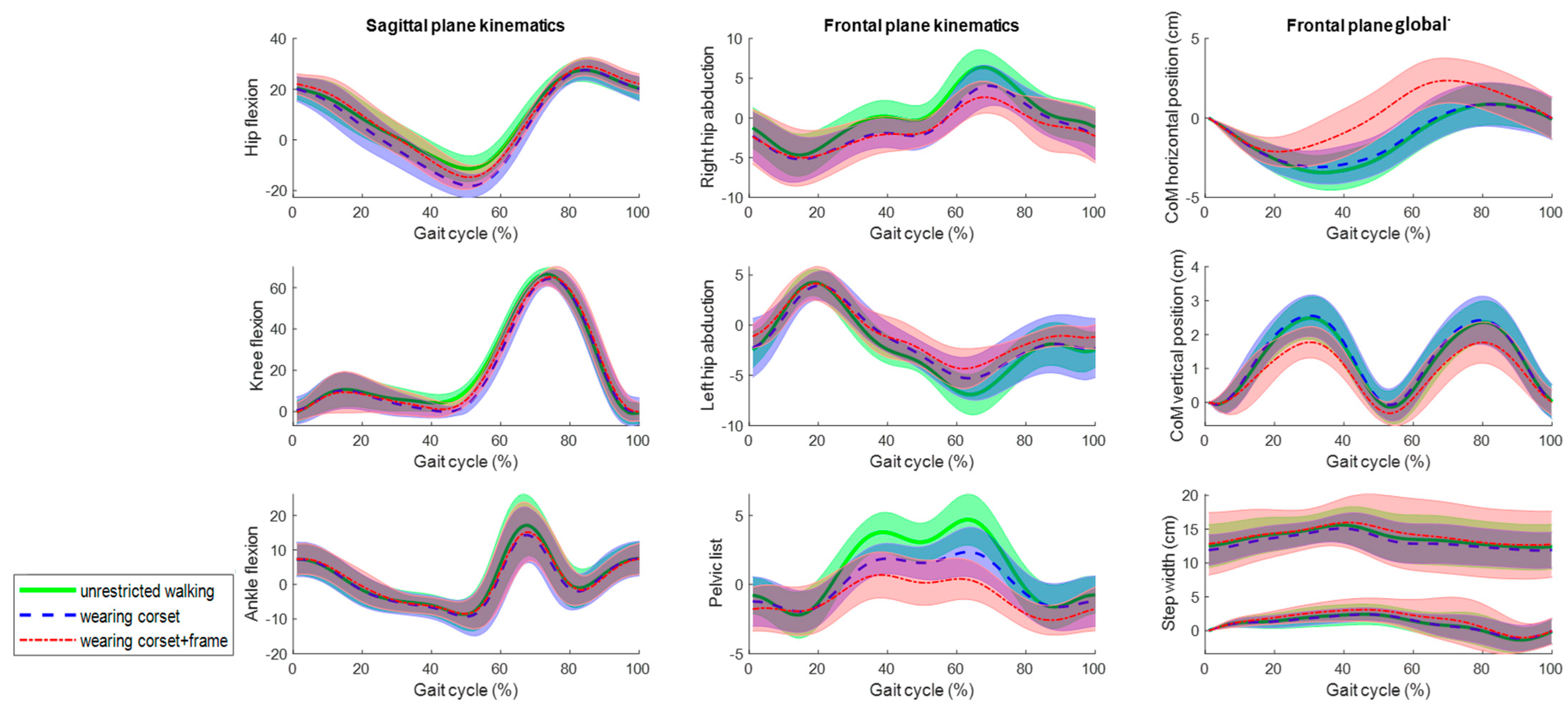
- Hip abduction as the angle between the segment joining both frontal hip markers and the corresponding frontal knee marker.
- Hip flexion as the angle between the vertical line and the segment joining the hip and knee lateral markers.
- Knee flexion as the angle formed by the hip, knee and ankle lateral markers.
- Ankle flexion as the angle formed by the knee, ankle and toe lateral markers.
2.3.3. Statistical Analysis
3. Results
3.1. Frame Design
3.2. Robotic Frame Kinematic Assessment
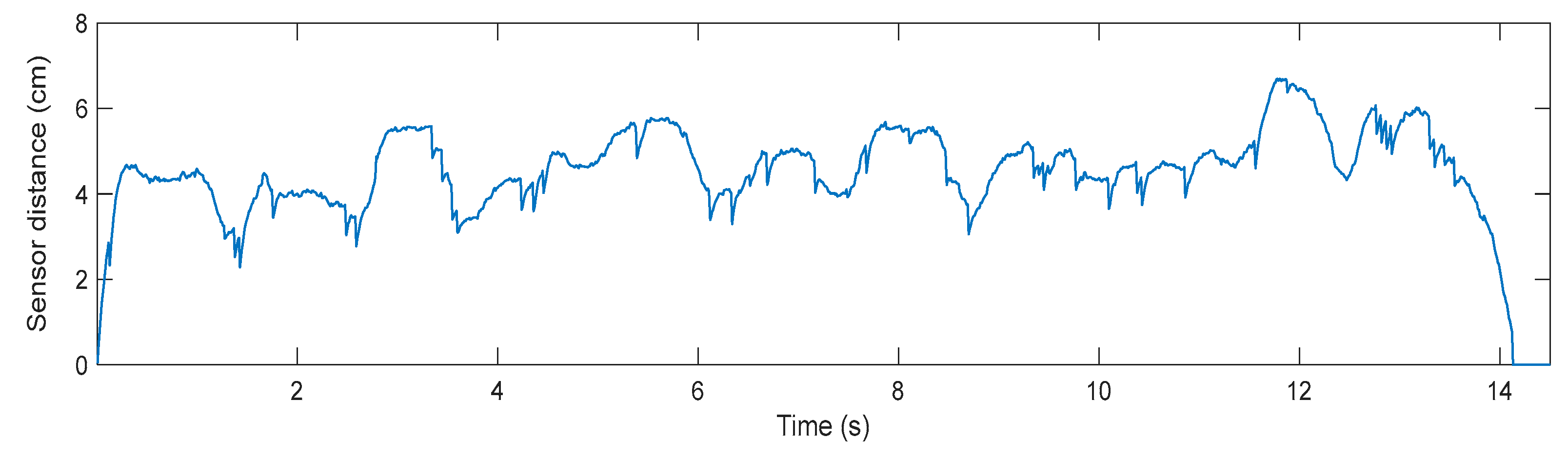
3.3. Robotic Frame Control Assessment
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Stolze, H.; Klebe, S.; Baecker, C.; Zechlin, C.; Friege, L.; Pohle, S.; Deuschl, G. Prevalence of gait disorders in hospitalized neurological patients. Mov. Disord. 2005, 20, 89–94. [Google Scholar] [CrossRef] [PubMed]
- Mekki, M.; Delgado, A.D.; Fry, A.; Putrino, D.; Huang, V. Robotic Rehabilitation and Spinal Cord Injury: A Narrative Review. Neurotherapeutics 2018, 15, 604–617. [Google Scholar] [CrossRef] [PubMed]
- Pearson, O.R.; Busse, M.E.; Van Deursen, R.W.M.; Wiles, C.M. Quantification of walking mobility in neurological disorders. QJM Int. J. Med. 2004, 97, 463–475. [Google Scholar] [CrossRef] [PubMed]
- Chiou, I.I.L.; Burnett, C.N. Values of Activities of Daily Living A Survey of Stroke Patients and Their Home Therapists. Phys. Ther. 1985, 65, 901–906. [Google Scholar] [CrossRef]
- Simpson, L.A.; Eng, J.J.; Hsieh, J.T.C.; Wolfe, D.L. The Health and Life Priorities of Individuals with Spinal Cord Injury: A Systematic Review. J. Neurotrauma 2012, 29, 1548–1555. [Google Scholar] [CrossRef]
- Ditunno, P.L.; Patrick, M.; Stineman, M.; Ditunno, J.F. Who wants to walk? Preferences for recovery after SCI: A longitudinal and cross-sectional study. Spinal Cord 2008, 46, 500–506. [Google Scholar] [CrossRef]
- Yang, J.F.; Musselman, K.E. Training to achieve over ground walking after spinal cord injury: A review of who, what, when, and how. J. Spinal Cord Med. 2012, 35, 293–304. [Google Scholar] [CrossRef]
- Rodríguez-Fernández, A.; Lobo-Prat, J.; Font-Llagunes, J.M. Systematic review on wearable lower-limb exoskeletons for gait training in neuromuscular impairments. J. Neuroeng. Rehabil. 2021, 18, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Carpino, G.; Pezzola, A.; Urbano, M.; Guglielmelli, E. Assessing Effectiveness and Costs in Robot-Mediated Lower Limbs Rehabilitation: A Meta-Analysis and State of the Art. J. Healthc. Eng. 2018, 2018, 7492024. [Google Scholar] [CrossRef]
- Bruni, M.F.; Melegari, C.; De Cola, M.C.; Bramanti, A.; Bramanti, P.; Calabrò, R.S. What does best evidence tell us about robotic gait rehabilitation in stroke patients: A systematic review and meta-analysis. J. Clin. Neurosci. 2018, 48, 11–17. [Google Scholar] [CrossRef]
- Lam, T.; Tse, C.; Sproule, S.; Eng, J.J. Lower Limb, Balance and Walking Following Spinal Cord Injury; SCIRE: Vancouver, BC, Canada, 2019. [Google Scholar]
- Mehrholz, J.; Harvey, L.A.; Thomas, S.; Elsner, B. Is body-weight-supported treadmill training or robotic-assisted gait training superior to overground gait training and other forms of physiotherapy in people with spinal cord injury? A systematic review. Spinal Cord 2017, 55, 722–729. [Google Scholar] [CrossRef] [PubMed]
- Mehrholz, J.; Thomas, S.; Kugler, J.; Pohl, M.; Elsner, B. Electromechanical-assisted training for walking after stroke. Cochrane Database Syst. Rev. 2020, 10, CD006185. [Google Scholar] [CrossRef]
- Dijkers, M.P.; Akers, K.G.; Dieffenbach, S.; Galen, S.S. Systematic Reviews of Clinical Benefits of Exoskeleton Use for Gait and Mobility in Neurologic Disorders: A Tertiary Study. Arch. Phys. Med. Rehabil. 2019, 102, 300–313. [Google Scholar] [CrossRef]
- Fisahn, C.; Aach, M.; Jansen, O.; Moisi, M.; Mayadev, A.; Pagarigan, K.T.; Dettori, J.R.; Schildhauer, T.A. The Effectiveness and Safety of Exoskeletons as Assistive and Rehabilitation Devices in the Treatment of Neurologic Gait Disorders in Patients with Spinal Cord Injury: A Systematic Review EBSJ Special Section: Systematic Review 2016. Glob. Spine J. 2016, 6, 822–841. [Google Scholar] [CrossRef] [PubMed]
- Holanda, L.J.; Silva, P.M.M.; Amorim, T.C.; Lacerda, M.O.; Simão, C.R.; Morya, E. Robotic assisted gait as a tool for rehabilitation of individuals with spinal cord injury: A systematic review. J. Neuroeng. Rehabil. 2017, 14, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Qiu, S.; Pei, Z.; Wang, C.; Tang, Z. Systematic Review on Wearable Lower Extremity Robotic Exoskeletons for Assisted Locomotion. J. Bionic Eng. 2022, 20, 436–469. [Google Scholar] [CrossRef]
- Dobkin, B.H.; Duncan, P.W. Should Body Weight–Supported Treadmill Training and Robotic-Assistive Steppers for Locomotor Training Trot Back to the Starting Gate? Neurorehabil. Neural Repair 2012, 26, 308–317. [Google Scholar] [CrossRef]
- Dietz, V. Spinal cord pattern generators for locomotion. Clin. Neurophysiol. 2003, 114, 1379–1389. [Google Scholar] [CrossRef]
- Hubli, M.; Dietz, V. The physiological basis of neurorehabilitation—Locomotor training after spinal cord injury. J. Neuroeng. Rehabil. 2013, 10, 5. [Google Scholar] [CrossRef]
- Marchal-Crespo, L.; Schneider, J.; Jaeger, L.; Riener, R. Learning a locomotor task: With or without errors? J. Neuroeng. Rehabil. 2014, 11, 25. [Google Scholar] [CrossRef]
- Basalp, E.; Wolf, P.; Marchal-Crespo, L. Haptic training: Which types facilitate (re) learning of which motor task and for whom? answers by a review. IEEE Trans. Haptics 2021, 14, 722–739. [Google Scholar] [CrossRef]
- Scivoletto, G.; Romanelli, A.; Mariotti, A.; Marinucci, D.; Tamburella, F.; Mammone, A.; Cosentino, E.; Sterzi, S.; Molinari, M. Clinical factors that affect walking level and performance in chronic spinal cord lesion patients. Spine 2008, 33, 259–264. [Google Scholar] [CrossRef]
- Urendes, E.; Asín-Prieto, G.; Ceres, R.; García-Carmona, R.; Raya, R.; Pons, J.L. HYBRID: Ambulatory robotic gait trainer with movement induction and partial weight support. Sensors 2019, 19, 4773. [Google Scholar] [CrossRef] [PubMed]
- Barbeau, H.; Blunt, R. A novel interactive locomotor approach using body weight support to retrain gait in spastic paretic subjects. Plast. Motoneuronal Connect. 1991, 461, 474. [Google Scholar]
- Allemand, Y.; Stauffer, Y.; Clavel, R.; Brodard, R. Design of a new lower extremity orthosis for overground gait training with the WalkTrainer. In Proceedings of the 2009 IEEE International Conference on Rehabilitation Robotics, Kyoto, Japan, 23–26 June 2009; pp. 550–555. [Google Scholar] [CrossRef]
- Chang, S.H.; Zhu, F.; Patel, N.; Afzal, T.; Kern, M.; Francisco, G.E. Combining robotic exoskeleton and body weight unweighing technology to promote walking activity in tetraplegia following SCI: A case study. J. Spinal Cord Med. 2020, 43, 126–129. [Google Scholar] [CrossRef] [PubMed]
- He, Y.; Nathan, K.; Venkatakrishnan, A.; Rovekamp, R.; Beck, C.; Ozdemir, R.; Francisco, G.E.; Contreras-Vidal, J.L. An integrated neuro-robotic interface for stroke rehabilitation using the NASA X1 powered lower limb exoskeleton. In Proceedings of the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society 2014, Chicago, IL, USA, 26–30 August 2014. [Google Scholar] [CrossRef]
- Van Hedel, H.J.A.; Rosselli, I.; Baumgartner-Ricklin, S. Clinical utility of the over-ground bodyweight-supporting walking system Andago in children and youths with gait impairments. J. Neuroeng. Rehabil. 2021, 18, 1–20. [Google Scholar] [CrossRef]
- Guo, Z.; Yu, H.; Yin, Y.H. Developing a mobile lower limb robotic exoskeleton for gait rehabilitation. J. Med Devices 2014, 8, 044503. [Google Scholar] [CrossRef]
- Lee, L.-W.; Li, I.-H.; Liang, T.-W. A Proof of Concept Study for the Design, Manufacturing, and Control of a Mobile Overground Gait-Training System. Int. J. Fuzzy Syst. 2021, 23, 2396–2416. [Google Scholar] [CrossRef]
- Lee, L.-W.; Li, I.-H.; Lu, L.-Y.; Hsu, Y.-B.; Chiou, S.-J.; Su, T.-J. Hardware Development and Safety Control Strategy Design for a Mobile Rehabilitation Robot. Appl. Sci. 2022, 12, 5979. [Google Scholar] [CrossRef]
- Luu, T.P.; Low, K.H.; Qu, X.; Lim, H.B.; Hoon, K.H. Hardware Development and Locomotion Control Strategy for an Over-Ground Gait Trainer: NaTUre-Gaits. IEEE J. Transl. Eng. Health Med. 2014, 2, 2100209. [Google Scholar] [CrossRef]
- Xu, T.; Li, G.; Li, Z.; Feng, Y. Multidirectional Gravity-Assist and Active-Following Lower-Limb Exoskeleton Robot for Gait Neurorehabilitation. In Proceedings of the ICARM 2022—2022 7th IEEE International Conference on Advanced Robotics and Mechatronics 2022, Guangxi, China, 3–5 July 2022; pp. 631–636. [Google Scholar] [CrossRef]
- Stauffer, Y.; Allemand, Y.; Bouri, M.; Fournier, J.; Clavel, R.; Metrailler, P.; Brodard, R.; Reynard, F. Pelvic motion measurement during over ground walking, analysis and implementation on the WalkTrainer reeducation device. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 2362–2367. [Google Scholar] [CrossRef]
- Wang, P.; Low, K.H.; Tow, A. Synchronized walking coordination for impact-less footpad contact of an overground gait rehabilitation system: NaTUre-gaits. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Stauffer, Y.; Allemand, Y.; Bouri, M.; Fournier, J.; Clavel, R.; Metrailler, P.; Brodard, R.; Reynard, F. The WalkTrainer—A New Generation of Walking Reeducation Device Combining Orthoses and Muscle Stimulation. IEEE Trans. Neural Syst. Rehabil. Eng. 2008, 17, 38–45. [Google Scholar] [CrossRef] [PubMed]
- Munawar, H.; Yalcin, M.; Patoglu, V. AssistOn-Gait: An overground gait trainer with an active pelvis-hip exoskeleton. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015; pp. 594–599. [Google Scholar] [CrossRef]
- Robotic Exoskeleton Exo-H3. Available online: https://www.technaid.com/products/robotic-exoskeleton-exo-exoesqueleto-h3/ (accessed on 5 September 2024).
- Neumann, D.A. Kinesiology of the Musculoskeletal System-e-Book: Foundations for Rehabilitation; Elsevier Health Sciences: London, UK, 2016. [Google Scholar]
- Perry, J.; Burnfield, J.M. Gait analysis. In Normal and Pathological Function, 2nd ed.; Slack: San Francisco, CA, USA, 2010. [Google Scholar]
- Cavagna, G.A.; Tesio, L.; Fuchimoto, T.; Heglund, N.C. Ergometric evaluation of pathological gait. J. Appl. Physiol. 1983, 55, 606–613. [Google Scholar] [CrossRef] [PubMed]
- Sanz, C.M. Marcha patológica. Rev. Pie Tobillo 2003, 17, 1–7. [Google Scholar]
- Baud, R.; Manzoori, A.R.; Ijspeert, A.; Bouri, M. Review of control strategies for lower-limb exoskeletons to assist gait. J. Neuroeng. Rehabilitation 2021, 18, 1–34. [Google Scholar] [CrossRef]
- Öberg, T.; Karsznia, A.; Öberg, K. Basic gait parameters: Reference data for normal subjects, 10–79 years of age. J. Rehabil. Res. 1993, 30, 210. [Google Scholar]
- Middleton, S. Clinical Guidelines For Stroke Management 2010; WHO: Gevena, Switzerland, 2010. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maximum | Minimum | Range of Motion | |||||||
|---|---|---|---|---|---|---|---|---|---|
| UW | +Corset | +Frame | UW | +Corset | +Frame | UW | +Corset | +Frame | |
| Hip flexion | 24.3 (2.6) | 22.0 (3.3) | 23.3 (3.4) * | −8.4 (4.5) | −14.2 (4.1) | −10.9 (5.1) * | 32.8 (4.3) | 36.2 (4.2) | 34.2 (4.8) * |
| Knee flexion | 57.9 (4.2) | 55.7 (4.9) | 56.7 (5.5) | 0.0 (3.0) | −1.5 (2.7) | −1.1 (2.8) | 57.9 (3.1) | 57.2 (4.2) | 57.8 (5.9) |
| Ankle flexion | 8.9 (3.4) | 7.5 (4.3) | 9.5 (3.8) * | −11.1 (3.0) | −11.4 (3.3) | −11.1 (3.0) | 20.0 (2.6) | 19.3 (2.6) | 20.6 (2.9) |
| Right hip abd * | 5.6 (1.7) | 4.0 (1.7) | 2.6 (2.0) * | −3.9 (3.2) | −4.4 (2.9) | −4.1 (2.3) | 9.5 (2.3) | 8.4 (2.2) | 6.7 (2.4) * |
| Left hip abd * | 3.7 (2.0) | 2.8 (1.8) | 2.6 (1.6) | −5.9 (1.9) | −5.6 (1.9) | −4.7 (1.9) * | 9.6 (1.8) | 8.4 (2.0) | 7.3 (2.1) * |
| Pelvis list | 4.9 (2.1) | 3.2 (1.5) | 1.9 (1.6) * | −2.7 (1.3) | −2.5 (1.7) | −2.8 (1.4) | 7.6 (1.3) | 5.8 (1.2) | 4.7 (1.4) * |
| CoM x 1 (cm) | 1.4 (1.3) | 1.6 (1.3) | 3.0 (1.7) * | −5.7 (1.1) | −4.7 (1.1) | −3.7 (1.4) * | 7.1 (1.3) | 6.3 (1.3) | 6.7 (1.8) |
| CoM y 2 (cm) | 1.5 (0.5) | 1.4 (0.4) | 0.9 (0.3) * | −0.5 (0.4) | −0.4 (0.2) | −0.3 (0.3) | 1.9 (0.4) | 1.8 (0.4) | 1.3 (0.3) * |
| Maximum | Minimum | Range of Motion | |||||||
|---|---|---|---|---|---|---|---|---|---|
| UW | +Corset | +Frame | UW | +Corset | +Frame | UW | +Corset | +Frame | |
| Hip flexion | 27.7 (4.4) | 27.8 (4.0) | 29.1 (3.5) | −11.5 (5.1) | −18.4 (4.5) | −15.0 (4.8) * | 39.2 (2.6) | 46.2 (2.8) | 44.1 (2.7) * |
| Knee flexion | 67.1 (3.4) | 65.7 (4.0) | 66.2 (4.2) | −2.2 (4.8) | −3.1 (4.1) | −1.9 (3.9) | 69.3 (2.0) | 68.8 (3.0) | 68.1 (2.8) |
| Ankle flexion | 18.4 (8.0) | 16.4 (7.2) | 18.1 (6.0) | −9.6 (4.5) | −10.5 (5.2) | −9.7 (3.8) | 28.0 (4.1) | 26.9 (4.1) | 27.8 (3.6) |
| Right hip abd * | 6.7 (2.2) | 4.4 (2.4) | 3.0 (1.7) * | −4.8 (2.6) | −5.4 (2.9) | −5.3 (3.6) | 11.5 (2.8) | 9.8 (2.7) | 8.3 (3.2) * |
| Left hip abd * | 4.5 (1.3) | 4.1 (1.4) | 4.5 (1.7) | −7.0 (1.9) | −5.5 (2.2) | −4.5 (1.9) | 11.6 (2.4) | 9.6 (2.4) | 9.0 (2.9) |
| Pelvis list | 5.0 (1.8) | 2.8 (1.6) | 1.1 (1.5) * | −2.6 (1.4) | −2.4 (1.5) | −3.1 (1.2) * | 7.7 (1.5) | 5.2 (1.3) | 4.2 (0.9) * |
| CoM x 1 (cm) | 1.1 (1.1) | 1.1 (1.2) | 2.5 (1.4) * | −3.5 (1.1) | −3.2 (1.0) | −2.3 (0.9) * | 4.6 (1.1) | 4.3 (1.3) | 4.7 (1.3) |
| CoM y 2 (cm) | 2.7 (0.5) | 2.7 (0.6) | 2.0 (0.5) * | −0.4 (0.3) | −0.4 (0.4) | −0.5 (0.3) | 3.1 (0.5) | 3.1 (0.5) | 2.5 (0.6) * |
| Mean | ||||
|---|---|---|---|---|
| UW | +Corset | +Frame | ||
| Step width (cm) | 0.5 m/s | 12.3 (3.1) | 11.7 (2.2) | 12.6 (4.5) |
| 1 m/s | 12.9 (3.0) | 12.2 (3.4) | 11.9 (2.3) | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramos-Rojas, J.; Castano, J.A.; Fernández, P.R.; Carballeira, J.; Pérez-Martín, E.; Lora-Millan, J.S.; Borromeo, S.; del-Ama, A.J. Design and Validation of an Ambulatory User Support Gait Rehabilitation Robot: NIMBLE. Actuators 2024, 13, 348. https://doi.org/10.3390/act13090348
Ramos-Rojas J, Castano JA, Fernández PR, Carballeira J, Pérez-Martín E, Lora-Millan JS, Borromeo S, del-Ama AJ. Design and Validation of an Ambulatory User Support Gait Rehabilitation Robot: NIMBLE. Actuators. 2024; 13(9):348. https://doi.org/10.3390/act13090348
Chicago/Turabian StyleRamos-Rojas, Jaime, Juan A. Castano, Pedro R. Fernández, Juan Carballeira, Emma Pérez-Martín, Julio S. Lora-Millan, Susana Borromeo, and Antonio J. del-Ama. 2024. "Design and Validation of an Ambulatory User Support Gait Rehabilitation Robot: NIMBLE" Actuators 13, no. 9: 348. https://doi.org/10.3390/act13090348
APA StyleRamos-Rojas, J., Castano, J. A., Fernández, P. R., Carballeira, J., Pérez-Martín, E., Lora-Millan, J. S., Borromeo, S., & del-Ama, A. J. (2024). Design and Validation of an Ambulatory User Support Gait Rehabilitation Robot: NIMBLE. Actuators, 13(9), 348. https://doi.org/10.3390/act13090348