Abstract
This paper introduces the prototype design, magnetic field analysis and experimental test of a double-rotating ferrofluid vane micropump with an embedded fixed magnet. The micropump is based on the working principle of a positive-displacement pump, as well as the magnetic characteristics and flow properties of magnetic fluid. Through the numerical analysis of the pump cavity magnetic field and the experimental test, the structural parameters of the micropump are optimized reasonably. The pumping flow and pumping height of the micropump were characterized at different driving speeds. The maximum pumping flow rate is approximately 410 μL/min, and the maximum pumping height is approximately 111.4 mm water column. The micropump retains the advantages of simple structure, easy manufacture, flexible control, self-sealing, self-lubrication, low heat production, etc., and can block the pumped liquid backflow. The resulting double-rotating ferrofluid blades can improve pumping efficiency and pumping capacity, and can improve pumping reliability and stability to a certain extent.
1. Introduction
Advances in modern precision engineering design have greatly promoted the development of microelectromechanical systems (MEMS). MEMS exhibit excellent versatility and ductility in small precision devices, with a compact appearance and less energy consumption and material loss [1]. As an important component of MEMS, microfluidics has wide application prospects in biomedicine, microbial chemistry, electronic cooling, physiological monitoring, judicial identification, aerospace and other fields [2,3,4,5,6,7]. As a key executive element of microfluidic control systems, micropumps provide necessary power for working fluid and play an important role in precise transport and flexible control of microfluidics [8]. Micropumps have great potential applications in microfluidic processing such as polymerase chain reaction (PCR), drug blood pumping, micro-total analysis systems (μTAS), lab-on-a-chip and electronic cooling systems [9,10]. As early as 1978, Spencer et al. [11] proposed the earliest micropump design. Nowadays, the field of micropumps is developing rapidly, divided into mechanical micropumps and non-mechanical micropumps according to the working principle [12]. Mechanical micropumps rely on the movement of micromechanical components or films to drive and control the liquid being pumped. Generally, the structure is complex, manufacturing is difficult, integrability is low, mechanical fatigue is common, and service life is short [13,14]. Non-mechanical micropumps rely on various physical effects for energy conversion to achieve microfluidic drive, such as electroosmotic [15], surface tension [16], hot gas bubble [17] and ferromagnetic flow [18]. Therefore, ferromagnetic fluid micropumps (FFMPs) are unique among non-mechanical micropumps because of their simple structure, easy integration, flexible control, lack of fatigue wear, self-sealing, self-lubrication, low driving current, low heat production and other advantages, and have been widely researched in the field of microfluidics.
Since the successful trial production of magnetic liquids by NASA in the 1960s, the application potential of magnetic liquids has been continuously developed [19,20]. In 1975, C.W. Miller [21] first proposed the prototype of ferrofluid drive, which controlled and drove the ferrofluid flow in tubes through an external controllable electromagnetic field, laying the foundation for the later development of ferrofluid micropumps. In 2001, Hatch [22] proposed a kind of annular microchannel FFMP with compact structure, flexible control and continuous pumping, which greatly reduced the volume, quality and manufacturing difficulty of micropumps, and promoted the further development of FFMPs. Later, many researchers conducted extensive studies on this basis. For example, Yaw-Jen Chang et al. [23] designed a microchannel immune chip with an immune-strengthening region in 2013, and found that pumping the chip through the circulation of a micropump could significantly enhance the immune response. However, the annular microchannel FFMP also has some problems, such as low pumping flow, low working back pressure and pumping fluid reflux. In addition, Ashouri et al. [24] proposed a linear reciprocating piston FFMP in 2017. The design of this pump is ingenious and easy to integrate. However, the design of the blocking valve makes the pumping volume efficiency of this micropump only 7%. In 2018, Liu [25] proposed a rotary ferrofluid vane micropump with a C-shaped baffle. During the pumping process, the C-shaped baffle and the ferrofluid cooperate to form a “valve” to inhibit reflux. However, the flow dead body formed by the C-shaped baffle and the inner wall of the pump chamber greatly reduces the pumping flow of the micropump. In 2020, Doganay S [10] et al. proposed a new rotary permanent magnet drive system based on FFMPs driving principle, which is used to manipulate magnetic nanofluids to pump chemical substances in a semicircular microchannel. The experimental results show that the system can meet the requirements of low flow rates for microfluidic applications, but it is difficult to meet the requirements of a high flow rate. With the rapid development of computer and graphic visualization technology, numerical calculation has gradually become an important means to study the complex flow of fluids. Many researchers try to use numerical methods to study the flow characteristics of FFMP. For example, in 2023, Wangxu Li [26] used overlapping grid technology and a six-degree-of-freedom model to numerically analyze the inlet and outlet velocity pulsation characteristics of FFMP in ring microchannels. The results showed that the inlet and outlet velocity of micropump were periodic and region dependent, and it was found that the increase in outlet back pressure was the key factor causing the return flow of the micropump. In the same year, Sufian Shaker [27] used the CFD method to study the influence of inlet and outlet angles on the flow performance of FFMPs. Through second-order momentum schemes and coupled momentum schemes, it was found that the gentler inlet and outlet angles could reduce the pressure loss coefficients of inlet and outlet, thereby improving their mechanical efficiency.
In summary, the structure and manufacturing process of FFMPs have been greatly simplified, and the integration has been greatly improved. However, there is still a need to improve the suppression of backflow, and the pumping efficiency and pumping flow rate need to be further improved. With the rapid development of microflow control systems in various fields, higher requirements are put forward for the structure and performance of micropumps. Miniaturization, high integration, wide flow range, high pumping stability, high accuracy, reflux suppression and low manufacturing difficulty have become the inevitable trends in the development of FFMPs. Based on the working principle of a positive-displacement pump and combined with the magnetic and flow characteristics of ferrofluid, this paper proposes a double-driven ferrofluid vane micropump with an embedded magnetic source. The FFMP retains the existing advantages, and the formed double-rotating ferrofluid vane can well block the backflow of the pumped liquid, improve its pumping capability, and improve the reliability and controllability of pumping to a certain extent.
2. Ferrofluid and Driving Principle
2.1. Properties and Basic Theory of Ferrofluid
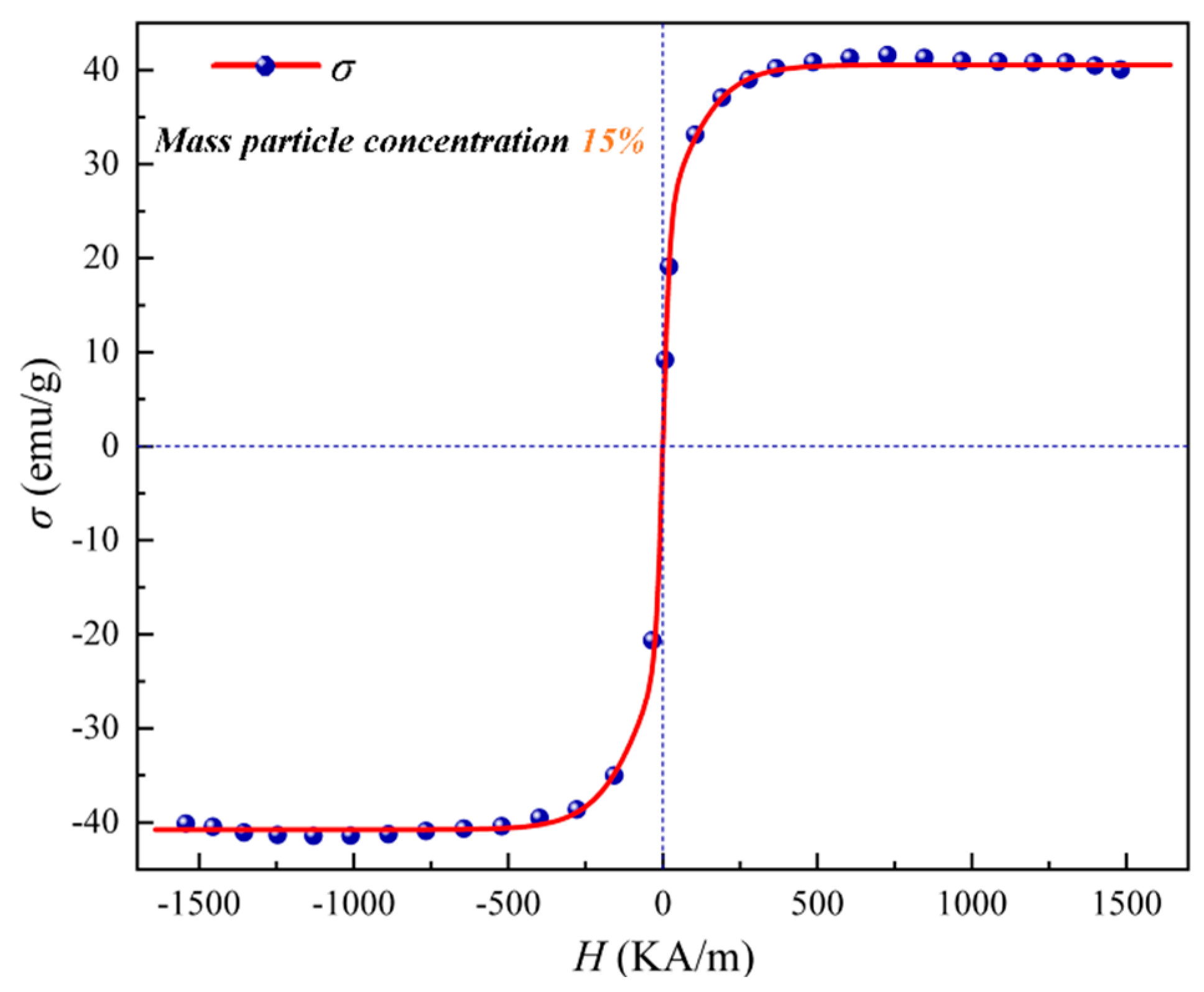
Ferromagnetic fluid is a kind of stable colloidal suspension which consists of nano magnetic particles coated with surfactants and uniformly dispersed in the substrate. It is a new kind of intelligent nanomaterial with both magnetic response and flow characteristics. The diameter of solid magnetic particles in ferrofluid usually does not exceed 10 nm, and such a small size causes strong Brownian motion between magnetic particles. The strong Brownian motion causes the magnetic particles to collide with each other, thus avoiding the agglomeration of particles. The long-chain molecules of active agents coated on the surface of magnetic particles can effectively prevent the agglomeration of particles. The relevant parameters and properties of the original ferrofluid (provided by Shenzhen Mei Qing Industrial Group Co., LTD., Shenzhen, China) used in this study are shown in Table 1. In order to reduce the viscosity of ferrofluid and improve its fluidity in the micropump cavity, the particle mass concentration of ferrofluid was diluted to 15% during the experiment.

Table 1.
Performance parameters of ferrofluid.
The magnetization properties of ferrofluid measured after dilution are shown in Figure 1. The magnetization of ferrofluids usually uses the special case of the Brillouin equation derived from quantum mechanics—the Langevin Equation (1) [28].
where M is the magnetization intensity of the ferrofluid; MP is the magnetization intensity of solid magnetic particle material; Φ is the volume fraction of solid magnetic particles; L(α) is the Langevin function; t is time; tB is the Brown diffusion time.
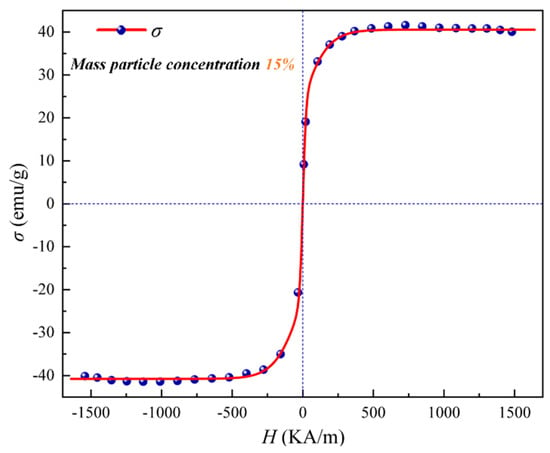
Figure 1.
Curve of magnetization properties of ferrofluid, where H is the magnetic field strength and σ is the magnetization of ferrofluid.
In terms of composition, ferromagnetic fluid is indeed a solid–liquid two-phase flow, but because of the extremely small size of the solid particles, the speed lag and temperature lag between the solid and liquid phases are almost negligible, and the ferromagnetic fluid can be physically regarded as a uniform mixture (a phase). Compared with general mixed flow, the mechanical equation of ferromagnetic fluid mixed flow is most different in that it contains the magnetic field action term [29,30], and the basic form of its motion equation is (2)
The left side of the equation: ρf is the density of the ferrofluid; V is the flow velocity; t is for time. Terms on the right side of the equation:
fg is the gravity of the ferrofluid;
fp is the pressure gradient of the ferrofluid, representing the surface force acting on the ferrofluid caused by the change in pressure space (3), where p is the pressure;
fƞ is the viscous force; when the external magnetic field is a non-uniform magnetic field, fƞ is (4)
where ƞH is the viscosity coefficient of the ferrofluid, i and j can represent different directions, and δij is the Kronecker function. In addition, in engineering practice, ferrofluid is generally incompressible, that is . Formula (4) can be simplified as
fτ is the additional force due to the lag of solid–liquid two-phase vortex velocity (6).
The rotation velocity of solid particles is ωp, and the vortex velocity of base liquid is ωc. When the two are unequal, there is a viscous torque Lτ (7)
where ƞc is the viscosity coefficient of the base fluid; ap is the mean radius of solid particles. n is the number of solid particles per unit volume of the ferrofluid.
fm is the magnetic force through which the external magnetic field controls the motion of the ferrofluid (8)
where B0 is the magnetic induction intensity of the external magnetic field, also known as the magnetization field.
2.2. Design and Driving Principle of Micropump
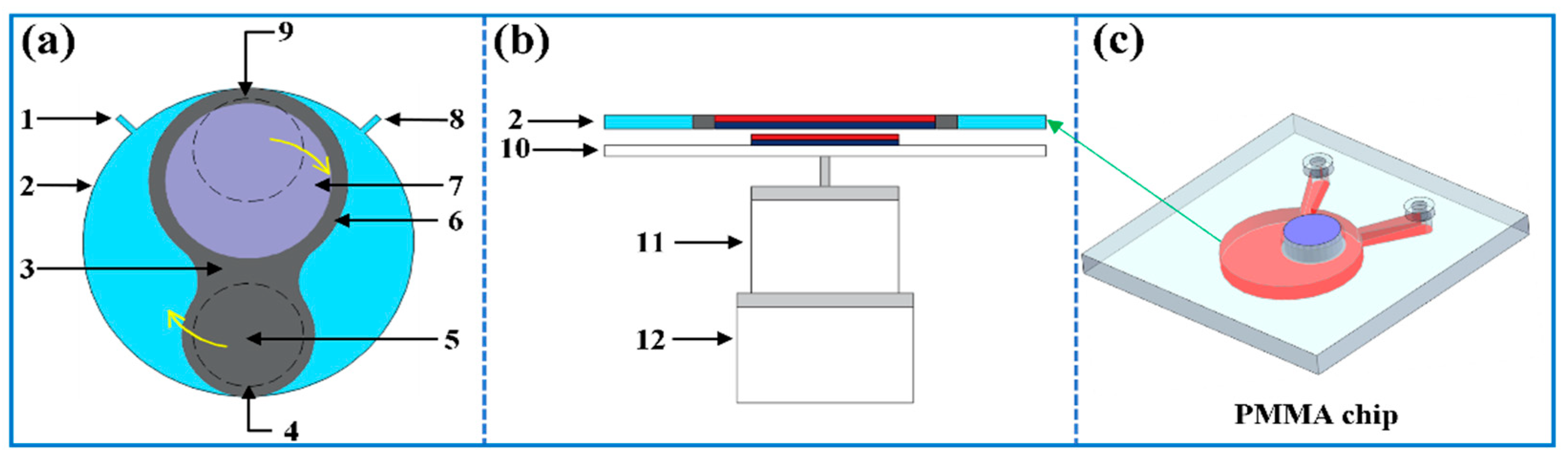
The overall structure of the micropump is shown in Figure 2. (a) is the main structure of the micropump, wherein 1 is the microchannel for liquid discharge from the pump chamber; 2 is a cylindrical pump chamber, and the pump chamber is processed on the PMMA chip as a whole, as shown in (c); Gray areas 3, 5 and 6 in the figure are ferrofluid blades formed under the control of external magnetic field, where 3 is the throat of the ferrofluid blade, 5 is the disc region of the ferrofluid blade, and 6 is the ring region of the ferrofluid blade. Dotted circles 4 and 9 represent the rotating permanent magnet (RPM) under the PMMA chip; 7 is the embedded fixed permanent magnet (FPM), and the distance between the center of the FPM and the center of the cylinder pump chamber on the same plane is defined as dc; 8 is the microchannel for liquid intake in the pump chamber. The whole micropump adopts a circular pump chamber with an embedded cylindrical permanent magnet, which has simple structure, flexible control and high volume utilization rate. The embedded FPM and external dual RPMs cooperate with each other to form a stable ferrofluid blade, and the ferrofluid blade can form a good seal with the inner wall of the pump cavity, thus isolating the inlet and outlet of the micropump. This enables the micropump to effectively prevent the pumped liquid from backflow without any external valve; In addition, two disk-like ferrofluid blades are formed in the pump cavity by dual RPMs, which enables the RPM to rotate 180° to complete a pumping cycle, which has higher pumping efficiency than that of a single magnetic source.
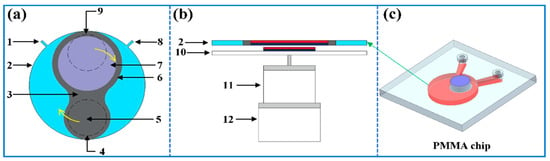
Figure 2.
Schematic diagram of micropump structure. Here, (a) is the main structure of the micropump, (b) is the overall sheme, and (c) is the PMMA chip for processing the pump chamber.
(b) is the overall implementation scheme of the micropump. The two rotating magnetic sources are installed on the disk 10 below the PMMA chip of the pump chamber, and the air gap width between the rotating magnetic sources and the pump chamber is defined as Wgap. The small stepper motor 12 provides power output for the driving magnetic source, of which 11 is the planetary reducer to accurately control the rotation of the driving magnetic source.
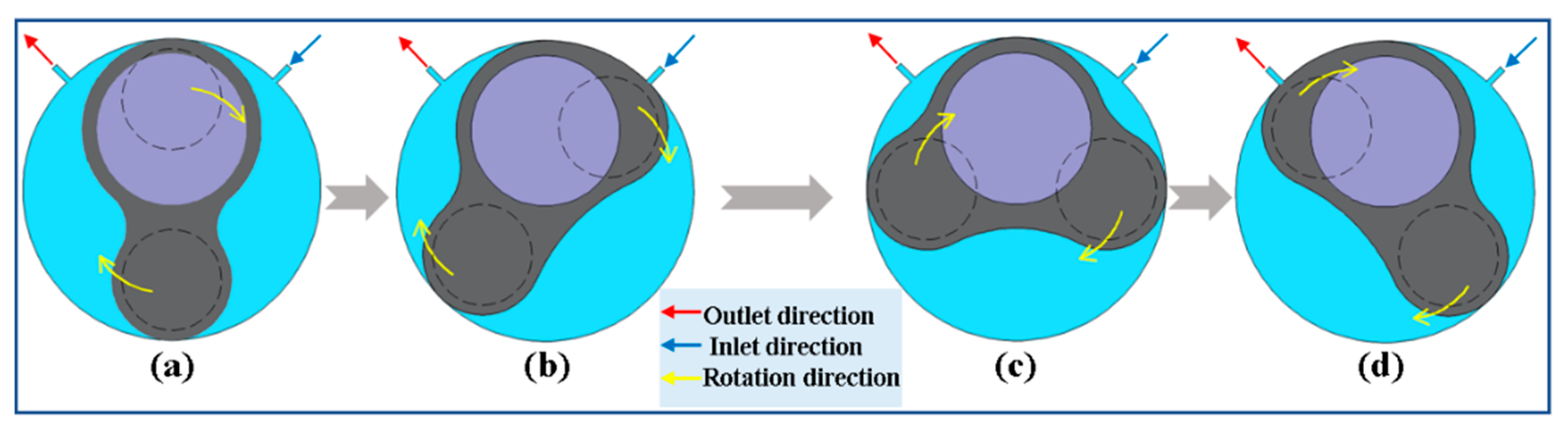
The pumping process of the micropump is shown in Figure 3. The external double-rotating magnets rotate clockwise synchronously under the drive of the motor. The time shown in (a) in the figure is defined as the initial pumping time, and the driving magnet rotation angle θ = 0° is defined at this moment. At the initial moment, the ferrofluid inside the pump cavity forms a stable ferrofluid blade under the joint action of the embedded fixed magnet and the external double drive magnet. The blade consists of three parts: a disk-like region that drives the magnetic source control (shown by 5 in Figure 2a), a ring region controlled by a fixed magnet (shown by 6 in Figure 2a), and a throat region controlled by both (shown by 3 in Figure 2a). The ferrofluid blade jointly divides the pump cavity into an outlet cavity and an inlet cavity under the action of a magnetic field.
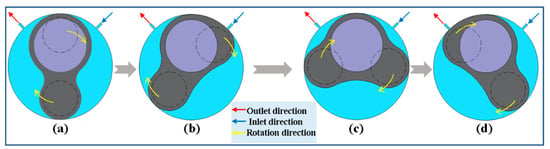
Figure 3.
The micropump pumping process.
With the rotation of the driving magnet, θ = 45°, the ferrofluid blade gradually blocked the liquid inlet microchannel, and the pumped liquid stopped entering the pump cavity and could not return at the same time, as shown in Figure 3b. At this time, the inlet cavity is gradually transformed into a driving cavity, and the driving cavity is not connected with the inlet and outlet channels. The pumped liquid in the drive cavity is driven by the ferrofluid blade and gradually approaches the exit channel. At the same time, the volume of the outlet cavity is gradually compressed in the process, and the liquid in the outlet cavity enters the outlet microchannel under the joint action of the ferrofluid blade and the pressure differential force, and the micropump realizes the pumping.
The rotating permanent magnets further rotates, θ = 90°, the inlet cavity reappears, and the new pumped liquid gradually enters under the action of vacuum, as shown in Figure 3c. At the same time, the outlet cavity gradually decreases until it disappears, in which all the pumped liquid is pumped out, as shown in Figure 3d. Then, the driving cavity is gradually connected with the outlet channel to become a new liquid outlet cavity, and the liquid in the original driving cavity is gradually pumped out. As the rotating magnetic source continues to rotate, the micropump enters the next pumping cycle.
In the whole pumping process, the constant change in the volume of the pump chamber causes the continuous pressure differential force in the chamber. The combination of pressure differential force and ferrofluid blade driving force makes the micropump achieve the purpose of stable pumping. Thus, the motor torque is transferred to the pumped liquid in the form of non-contact magnetic coupling force. At the same time, the ferrofluid blade keeps the inlet and outlet channels isolated under the joint action of the three magnetic sources, thus inhibiting the backflow of the pumped liquid.
3. Magnetic Field Numerical Analysis and Design Parameter Optimization
3.1. Numerical Analysis of Magnetic Field
The pumping capacity and stability of FFMP described in the previous section are directly related to the formation and movement of ferrofluid blades. The formation and motion of the ferrofluid blade in the pump cavity are directly affected by the magnetic field intensity gradient and magnetic field density. The magnetic field distribution in the pump cavity is directly related to the overall structure design of the micropump, the position of the magnetic source, the direction arrangement of the magnetic pole and the width of the air gap. Table 2 shows the initial design parameters of FFMP in this paper. The magnetic source is a cylindrical permanent magnet, and the magnetization direction is along its axis.
Table 2.
Initial parameters of micropump and permanent magnet.
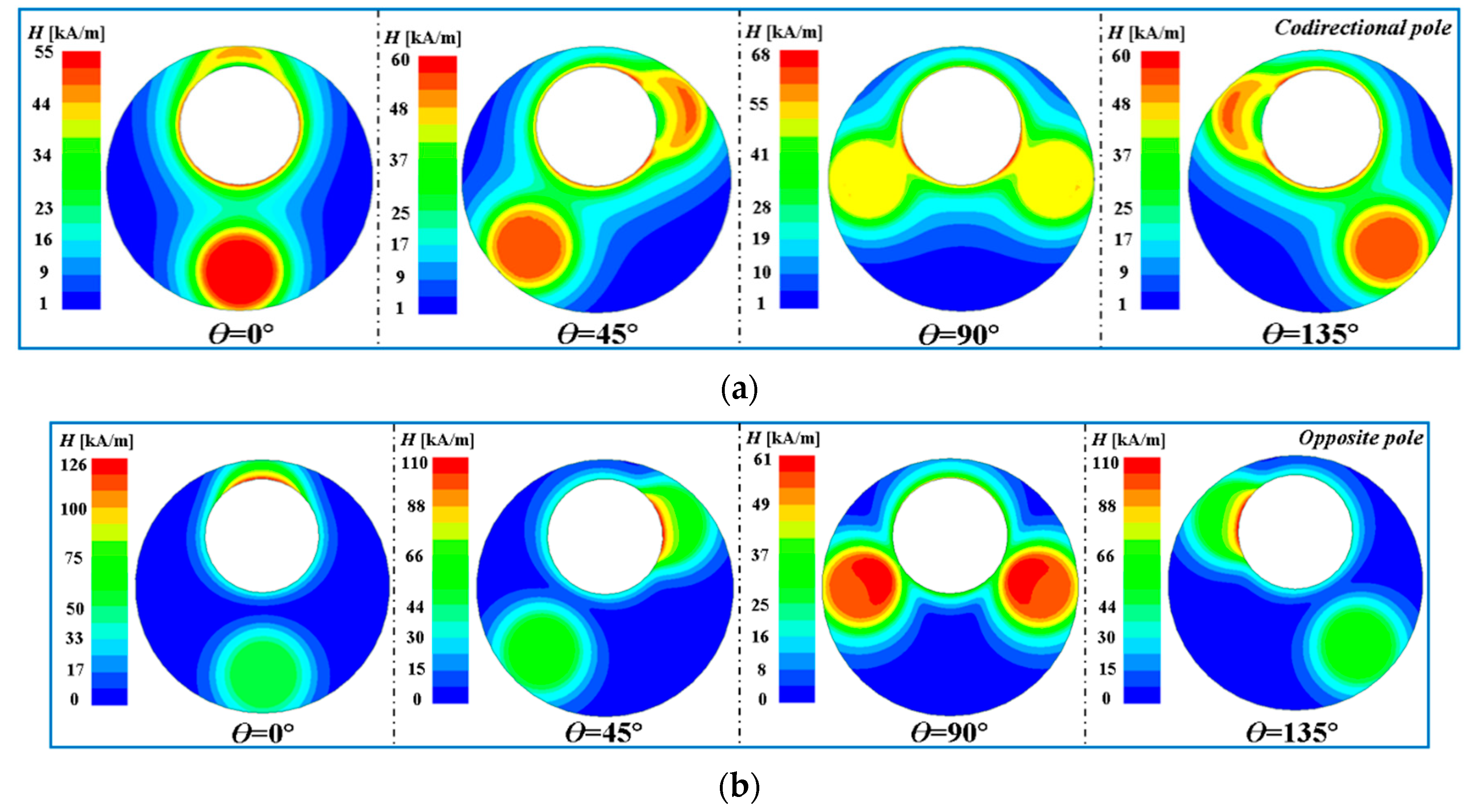
Because the RPMs move clockwise in a uniform circular motion under the cylindrical pump chamber, the magnetic field in the pump chamber will show periodic changes with its movement. The center plane of the pump cavity is taken as the test plane of the magnetic field numerical calculation, and the magnetic field numerical calculation and analysis are carried out by Ansys Maxwell software (ANSYS Electornic2021R1). The computed boundary condition is set to Zero Tangential H Field. Permanent magnet imparts NdFe30 material, coercive force Hc = 837,999 A/m, magnetization direction is set to the Z axis direction. The relative permeability of ferrofluid is set to 1.04. The maximum mesh size of the pump cavity is 0.1 mm, the maximum mesh size of the magnetic source is 0.2 mm, and the maximum mesh size of the air domain is 1 mm. In order to explore the influence of the magnetic pole direction of the magnetic source, the magnetic pole directions of the FPM and the RPMs were the same (dual RPMs and FPM pole directions were set to 1) and opposite (dual RPMs pole directions were set to 1 and FPM pole directions were set to −1), respectively. The magnetic field intensity distribution of the test plane is shown in Figure 4.
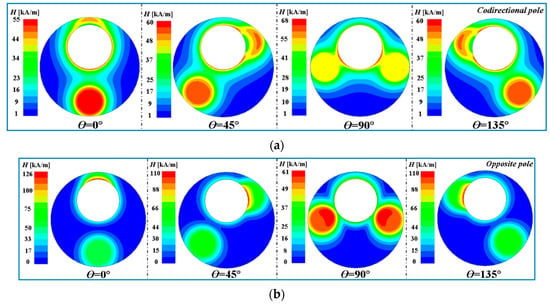
Figure 4.
Magnetic field distribution of pump cavity with different rotation angles θ. (a) RPMs and FPM magnetic poles are in the codirectional direction. (b) RPMs and FPM magnetic poles are in the opposite direction.
As shown in Figure 4a, when the magnetic pole directions of RPMs and FPM are the same, the overall magnetic field distribution in the pump cavity is in line with the design expectation of the micropump. In the whole process of RPMs movement, an obvious ferrofluid blade magnetic field region is formed in the pump cavity from the magnetic field distribution. The disc region dominated by RPMs in this region has a high intensity and uniform magnetic field distribution, which is conducive to the stability of the ferrofluid blade in the pump cavity. In the magnetic field region corresponding to the throat of the ferrofluid blade, the magnetic field gradient transition is smooth, and the middle region connecting the disc region and the ring region of the ferrofluid blade has a high magnetic field intensity (H ≥ 23 kA/m). This is conducive to the connection of the ferrofluid blade ring and disc, as well as the compression resistance.
As can be seen from Figure 4b, the maximum magnetic field intensity in the pump cavity is greatly enhanced when the magnetic pole direction of RPMs and FPM is opposite. However, it only appears at θ = 0°, 45°, 135° and occupies an extremely small area, which leads to an extremely uneven distribution of the magnetic field in the pump cavity. At this time, the magnetic field gradient in the magnetic field region corresponding to the throat of the ferrofluid blade is too large, and the magnetic field intensity in the middle connection region is low (H ≤ 17 kA/m), which will lead to extremely poor stability of the ferrofluid blade or even difficult to form.
The disc ferrofluid and the ring ferrofluid form a contraction-like “throat” ferrofluid region at the joint. The intensity of the magnetic field in the throat region is the key to the formation of ferrofluid blade. In addition, the magnetic field distribution in the disk ferrofluid region and the annular ferrofluid region near the wall of the pump cavity is also very important. It determines whether the ferrofluid blade can realize the purpose of separating the pump cavity. To sum up, the magnetic pole direction of RPMs and FPM should be consistent in the implementation of the micropump.
3.2. Validation and Parameter Optimization
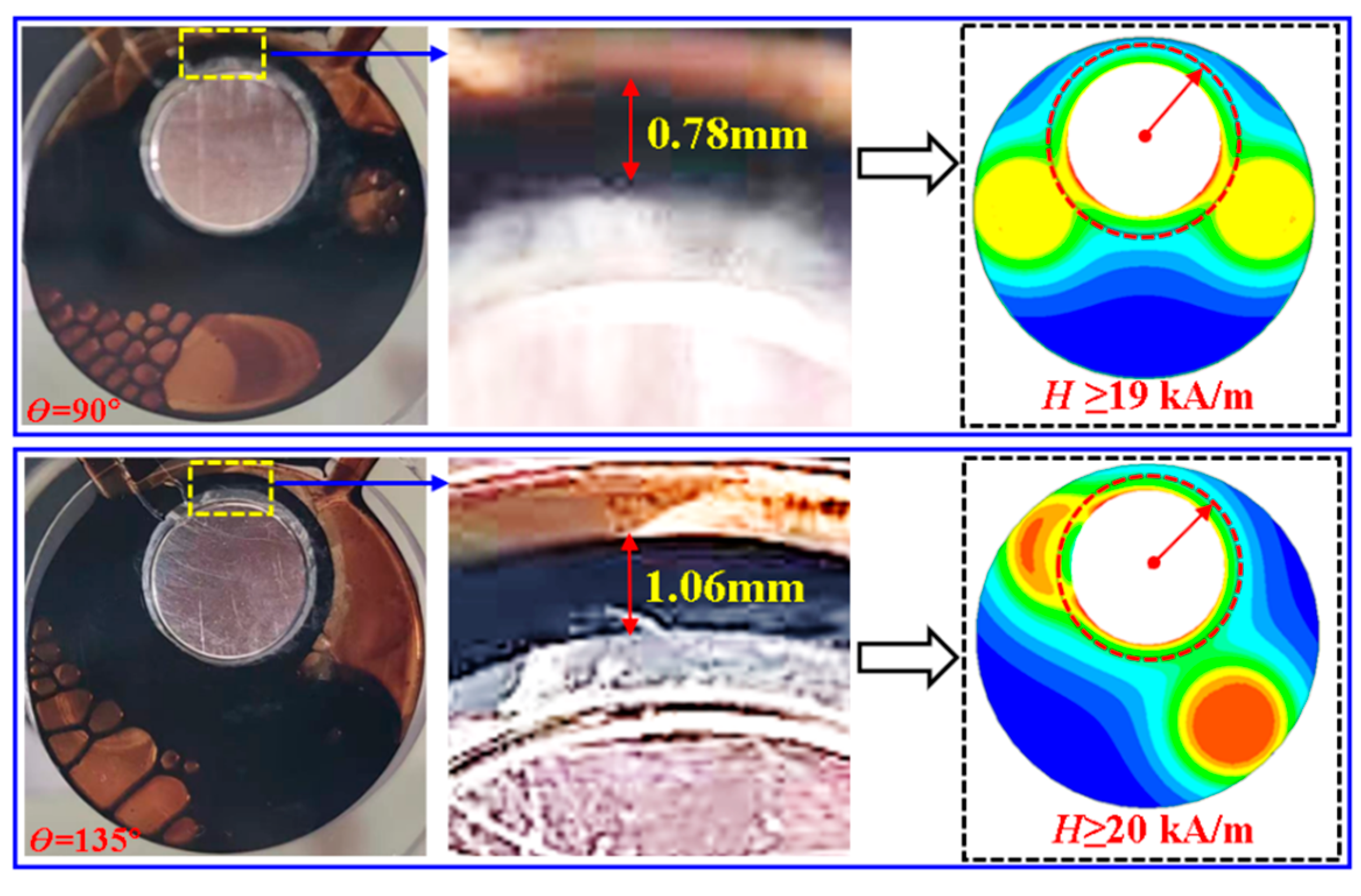
In order to verify the feasibility of the initial design parameters and the accuracy of the numerical analysis of the magnetic field of the pump cavity, the ferrofluid motion experiment of the micropump was carried out. The magnetic pole direction of RPMs and FPM was the same during the test. The results of experimental observation and numerical calculation of pump chamber magnetic field show that the ferrofluid is not disconnected in the center of throat magnetic field when θ = 0°. The ferrofluid disk driving the magnetic source adsorption can be successfully connected with the magnetic flow ring of the fixed magnetic source adsorption to form a stable ferrofluid blade. But, when θ = 45°, 90°, or 135°, the annular ferrofluid pulled by the fixed magnetic source cannot be closely fitted with the pump chamber at the upper side near the inner wall of the pump chamber, resulting in the failure to isolate the pump chamber.
Figure 5 shows the comparison between the cloud image of the magnetic field distribution in the pump chamber and the experimental measurement at θ = 90° and 135°. It can be seen from the figure that the analysis and prediction of the cloud map of magnetic field distribution in the pump chamber in Section 3.1 is reasonable. The distribution of magnetic field near the inner wall of the pump cavity on the upper side of the annular ferrofluid region pulled by a fixed magnetic source presents a weak magnetic field intensity, resulting in the failure of the ferrofluid blade to separate the volume of the pump cavity. And when θ = 90°, the magnetic field of the disk ferrofluid region formed by the driving magnetic source is relatively weak, resulting in the instability of the ferrofluid disk in the experimental test. In addition, the experimental phenomenon shows that when θ = 90°, the average width of the upper side of the ferrofluid ring formed by the traction of a fixed magnetic source is 0.78 mm, and the effective magnetic field intensity corresponding to the magnetic field distribution cloud map should not be less than 19 kA/m. When θ = 135°, the average width of the upper side of the ferrofluid ring formed by the traction of the fixed magnetic source is 1.06 mm, and the effective magnetic field intensity corresponding to the magnetic field distribution cloud map should not be less than 20 kA/m. It can be seen that the effective magnetic field range formed by the fixed magnetic source in the pump cavity should not be less than 20 kA/m.
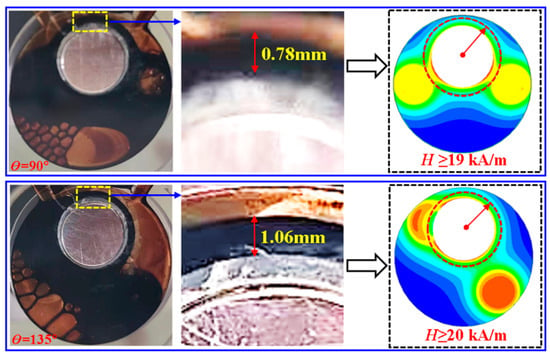
Figure 5.
Comparison between the experimental test and the magnetic field distribution cloud map.
Therefore, the separation of the ferrofluid blade from the pump cavity can be realized by enhancing the magnetic force of the permanent magnet or reducing the gap between the FPM and the inner wall of the upper pump cavity. At the same time, taking into account the cost of permanent magnet customization, if the overall structure of the micropump is unchanged, the permanent magnet is not replaced, and the diameter of the pump cavity can be appropriately reduced, or the distance dc between the center of the circle of the FPM and the pump cavity can be increased, while the latter needs to pay attention to the reduction in the magnetic field in the throat magnetic field region. In this study, the strategy of reducing the diameter of the pump cavity was adopted, and the diameter of the pump cavity was reduced to 18.5 mm based on the initial design parameters of the micropump.
4. Experimental Tests
4.1. The Ferrofluid Micropump Test System
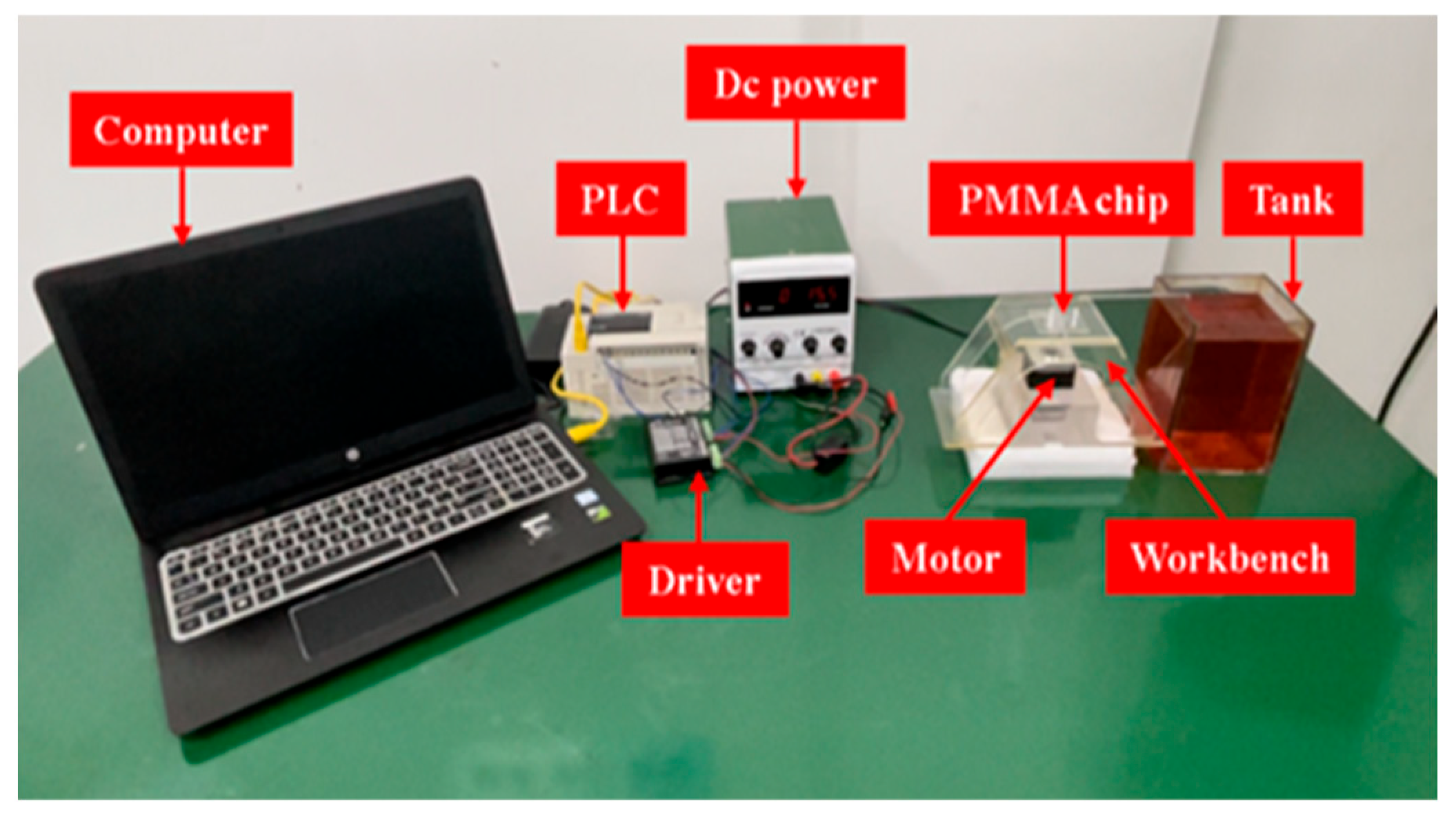
In order to verify the pumping feasibility and pumping performance of FFMP, the micropump sample was tested for maximum pumping flow and maximum pumping back pressure. The micropump experimental test system is shown in Figure 6. The bottom of the workbench of the micropump is provided with a slot for installing a small stepper motor, and the top is provided with a thin slot for installing a PMMA sheet supporting the micropump. The water tank contains the pumped liquid, the experiment uses deionized water as the pumped liquid, and uses a very small amount of red ink for dyeing, so as to facilitate observation.
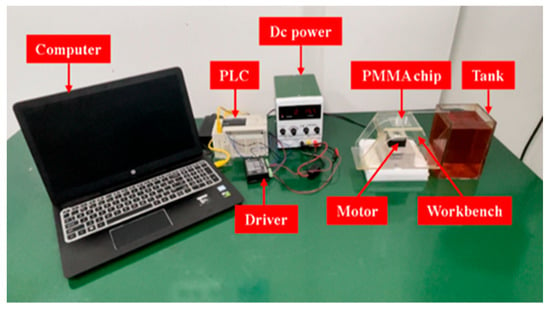
Figure 6.
The ferrofluid micropump test system.
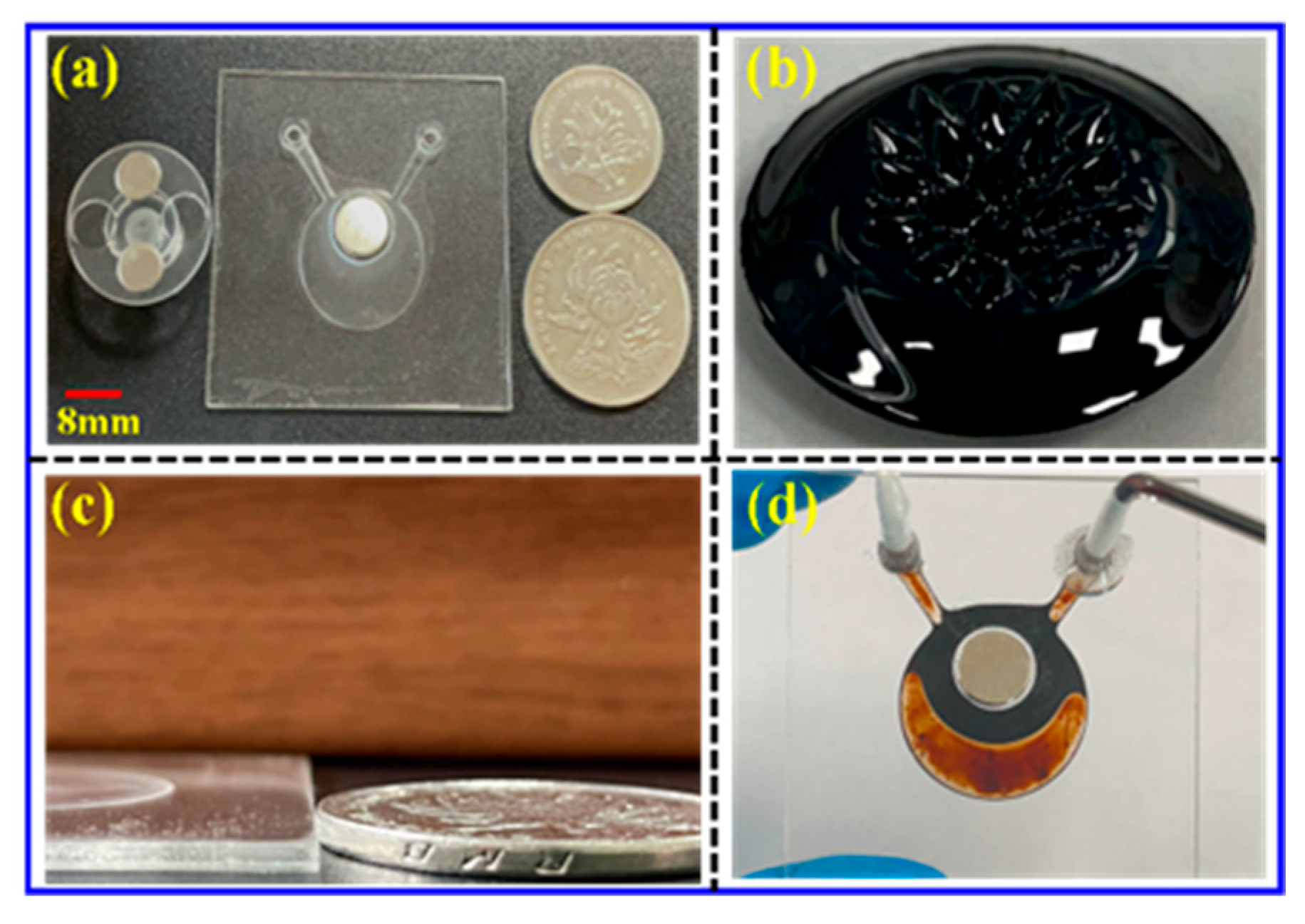
The processed micropump sample and the ferrofluid used are shown in Figure 7. The sample of the micropump is processed on the PMMA chip using high-precision CNC technology (Shenzhen Taikan, micron-level machining accuracy), and the overall thickness of the PMMA chip after processing is 1.5 mm. PMMA materials are highly transparent and biocompatible, and are inexpensive and easy to machine. On the left of (a) is the disc-shaped coupling where the RPMs is installed. In the middle is the sample of the micropump, whose import and export adopt the expansion shape design. While reducing the flow resistance of the inlet and outlet channels, the space required by the ferrofluid at θ = 45° and 135° can be reserved to avoid the pollution caused by the ferrofluid being squeezed out of the inlet and outlet channels. The experiment uses a ferrofluid with a solid magnetic particle mass fraction of 15%. Figure (b) shows the peak shape of the ferrofluid under the action of an external magnetic field. Figure (c) shows the thickness of the PMMA chip, which is smaller than an ordinary coin. (d) The state of the micropump sample after connecting the capillary glass tube and injecting ferrofluid.
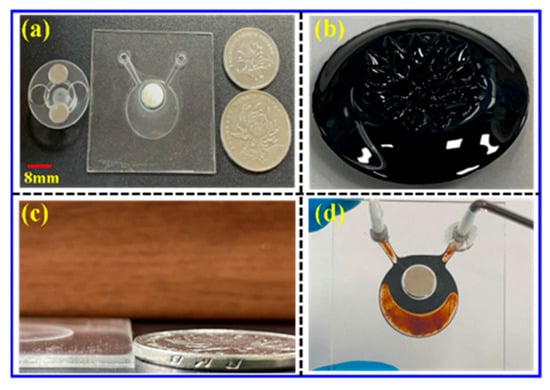
Figure 7.
Micropump sample and ferrofluid morphology.
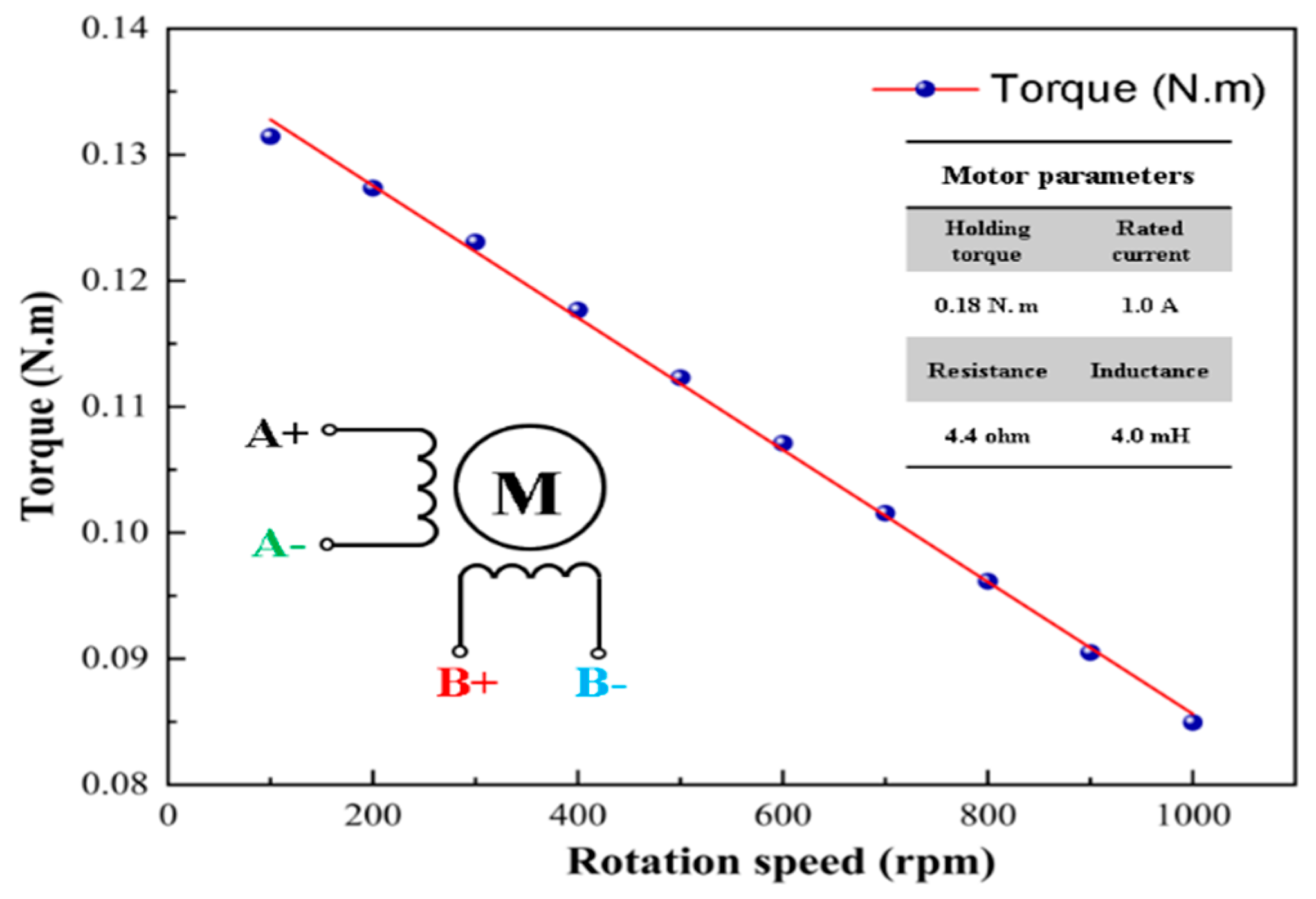
As the only power source of the ferrofluid micropump, the performance of small stepper motor plays a key role in the pumping of the micropump, and provides power support for the precise control of RPMs movement. The experiment adopts a small stepping motor (YQDXC 28HB50-402A Provided by Yueqing Dexuan Motor Co., LTD., Wenzhou, China), whose step angle is 1.8°. The torque curve, main performance parameters and wiring mode are shown in Figure 8. It is driven by a stepper motor driver (HST-B325B Provided by Jiangsu Wheatstone Electromechanical Technology Co., LTD., Changzhou, China). The rotation direction, rotation speed and momentum of RPM are controlled by the programmable logic controller (FX3U-32MT Provided by Mitsubishi Electric Automation (China) Co., LTD., Shanghai, China) and corresponding programs. The driver program is written by Mitsubishi PLC programming software GX Developer 1.103H.
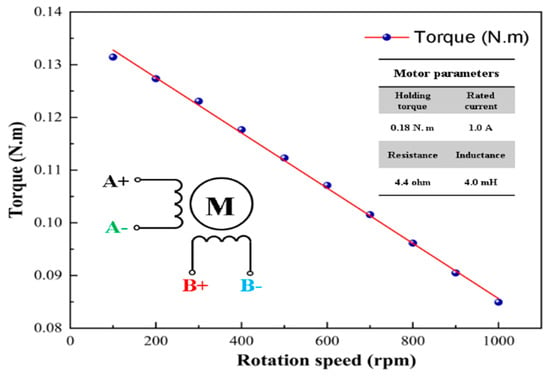
Figure 8.
Motor performance parameters and torque curve.
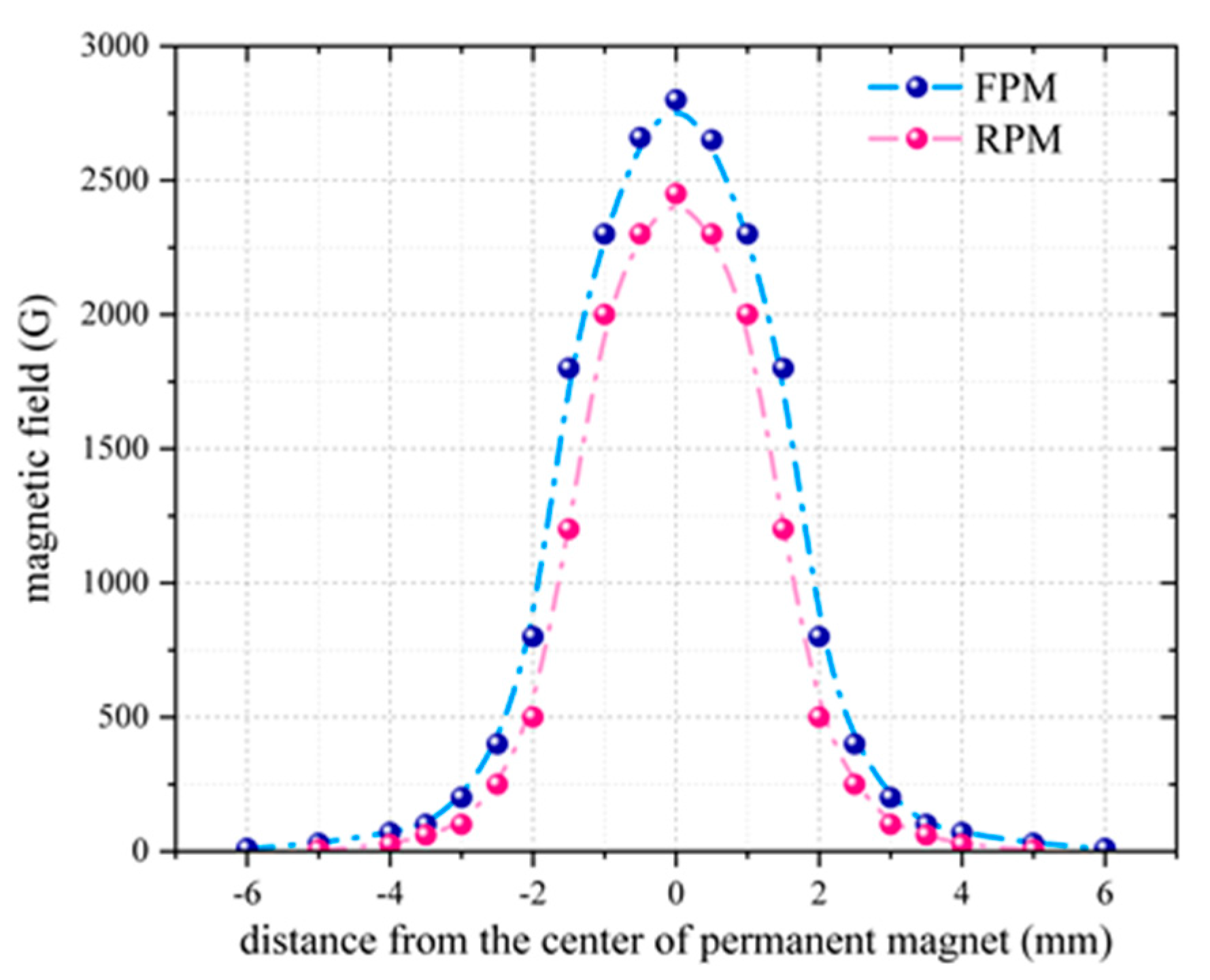
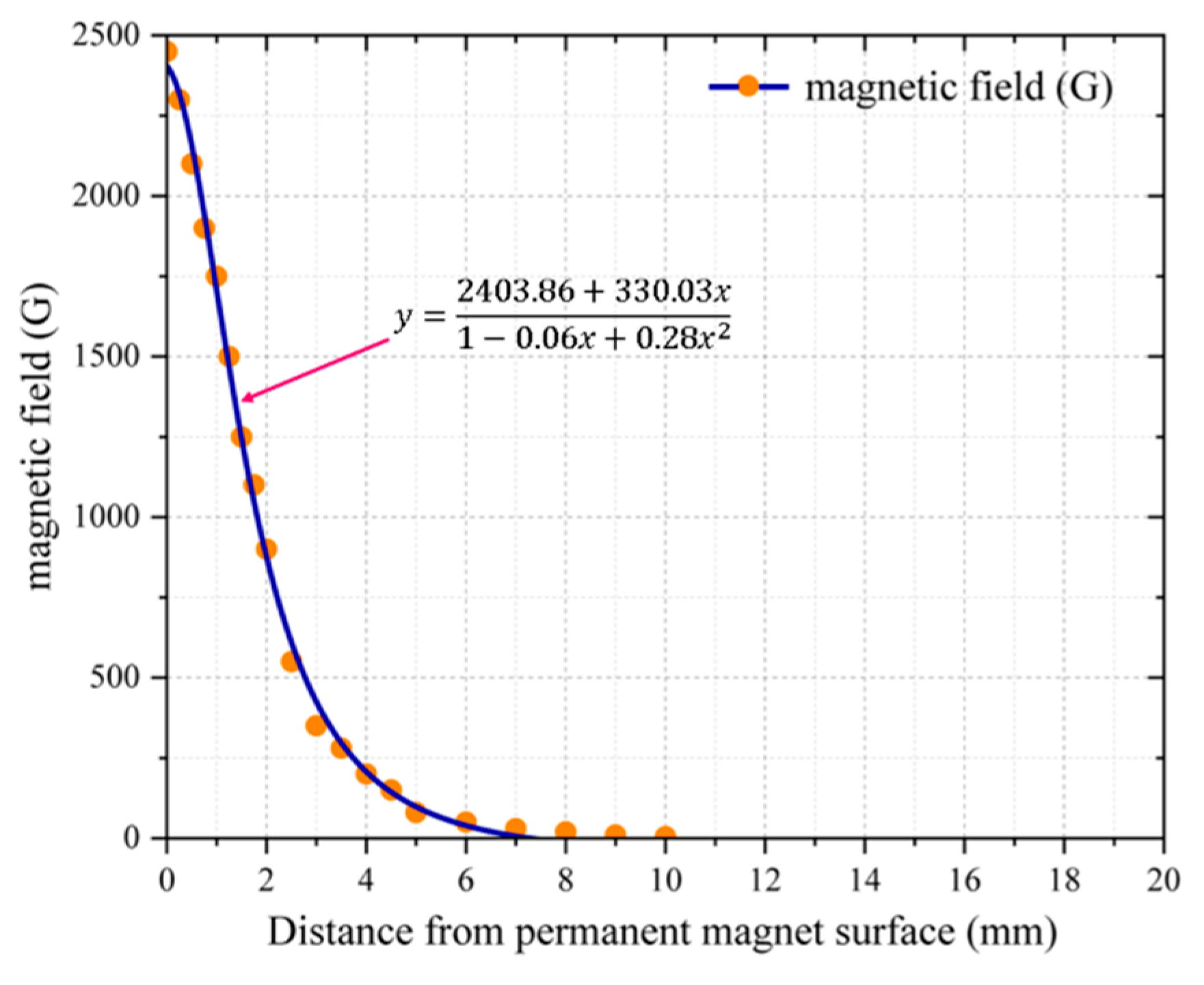
The permanent magnet used in the experiment is sintered from N52 Ndfeb permanent magnet material, and its surface adopts a three-layer electroplating process (nickel-copper-nickel), which has high magnetic properties and good corrosion resistance. The surface magnetic field distribution of FPM and RPM was measured by YOWEXA digital Tesla meter (YW-821-A), as shown in Figure 9. It can be seen that from the center of the permanent magnet outward, the magnetic field strength drops sharply. In order to make full use of the magnetic field generated by the permanent magnet, the center area of the cylindrical permanent magnet should be placed in the covered area of the pump cavity as far as possible. Therefore, the double RPMs in this design are completely placed under the pump cavity in the form of coverage, which is conducive to the full utilization of the magnetic field of the permanent magnet. Since there is a certain air gap between RPMs and the pump chamber in the experiment, the magnetic field intensity at different distances from the RPM surface was measured, as shown in Figure 10. It can be seen from the figure that the magnetic field distribution of RPM conforms to the Biot–Savart law in magnetostatics [31], which states that the magnetic field intensity at a certain point in space is inversely proportional to the square distance of the magnetic source.
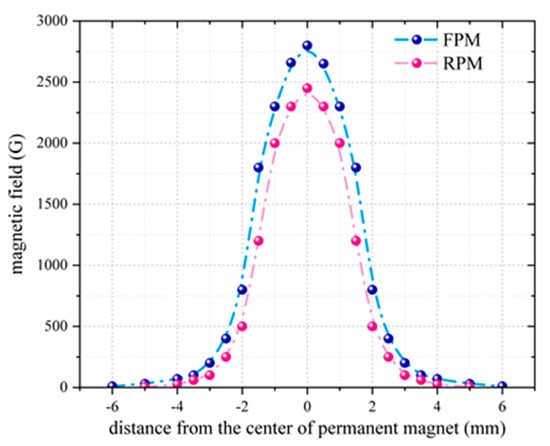
Figure 9.
Gradient distribution of magnetic field on permanent magnet surface.
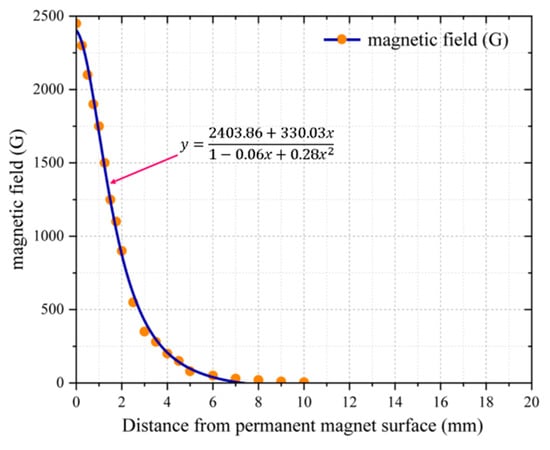
Figure 10.
Variation in the RPM magnetic field with distance.
4.2. The Micropump Pumping Experiment Test
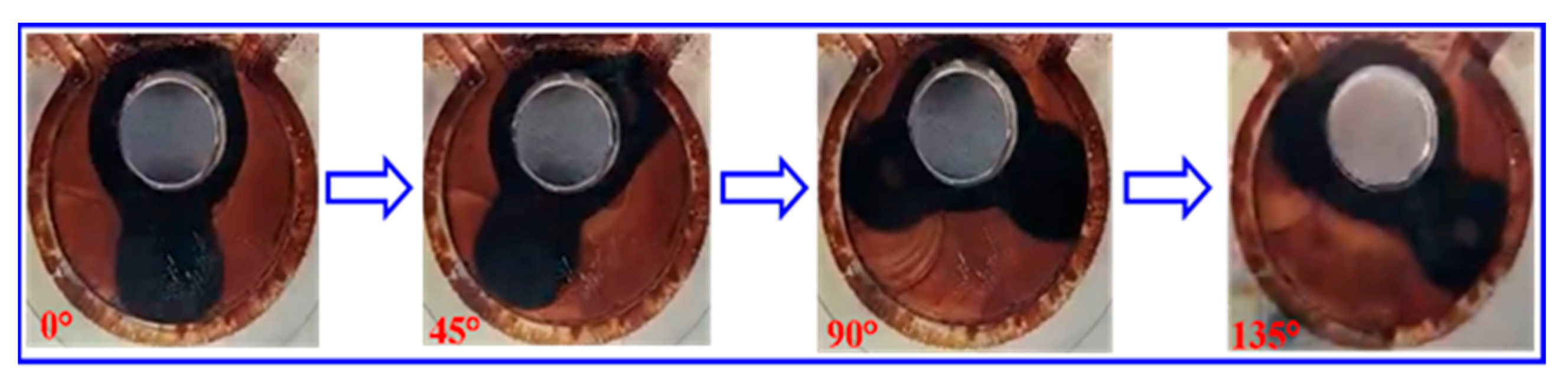
As described in Section 3.2, in order to ensure the formation and stability of the ferrofluid blade in the pump cavity of the micropump, and to ensure that the ferrofluid blade completely separates the volume of the pump cavity, the pump cavity size is reduced on the basis of the initial design parameters of the micropump. The final pump chamber diameter of the micropump sample is 18.5 mm, and the distance between the center of the circle of the FPM and the cylindrical pump chamber is still dc = 4 mm. Figure 11 shows the experimental photos of the micropump pumping process. As can be seen from the figure, stable ferrofluid blades can be formed in the pump cavity after adjusting the size parameters of the micropump. The motion of the ferrofluid blade in the whole pumping process meets the design expectation. The disk-like ferrofluid pulled by the RPM and the ring-like ferrofluid pulled by the fixed magnetic source can completely separate the pump cavity.
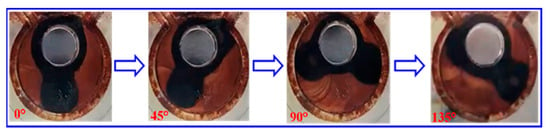
Figure 11.
Pumping process of the ferrofluid micropump.
According to the actual pumping process of the micropump, it can be seen that a stable ferrofluid blade is formed in the pump cavity, and its motion pattern is consistent with Figure 3. It is found that the micropump can achieve stable pumping effect when the RPMs speed is low. In order to test the pumping performance of the micropump, the maximum pumping flow and maximum pumping height were tested, respectively. The size of the tank is much larger than the inner diameter of the glass capillary tube and the pump chamber, so the height of the liquid surface in the tank can be regarded as constant during the experiment. The experiment tested the maximum pumping flow and pumping height of the micropump at different speeds. The maximum pumping flow was carried out at 0 back pressure. The continuous pumping mode was adopted, and each speed was measured for 3 min to obtain the average pumping flow. The test results of micropump pumping are shown in Figure 12 and Figure 13.
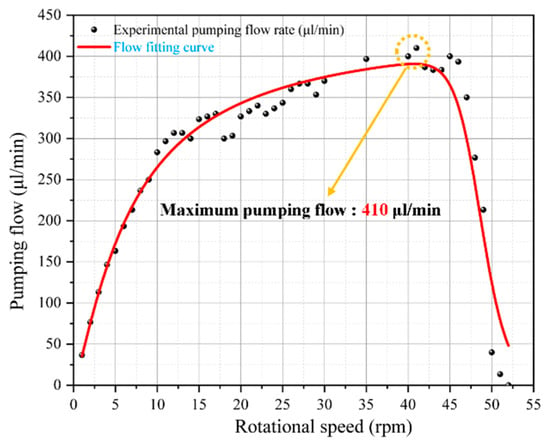
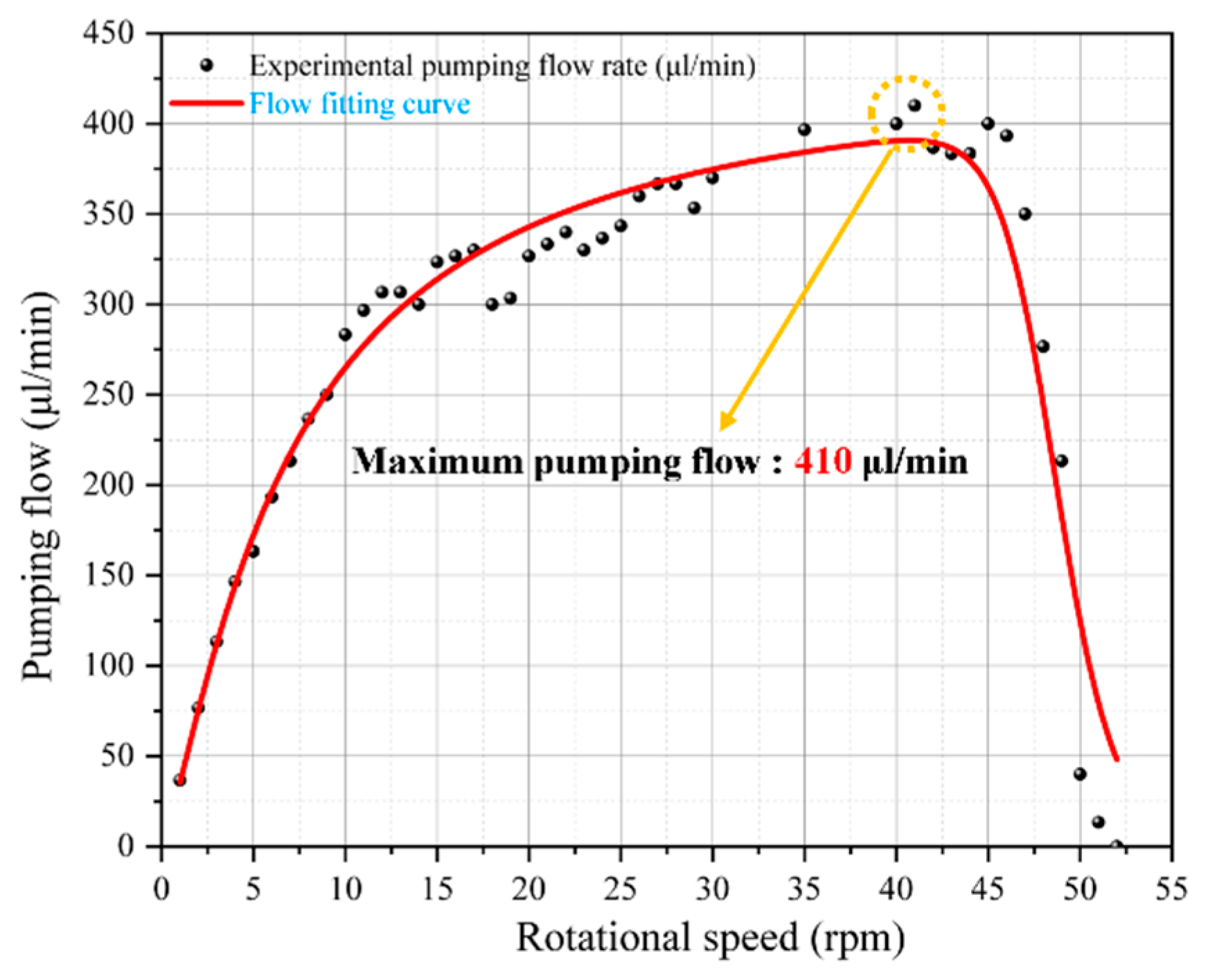
Figure 12.
Micropump pumping flow at different speeds.
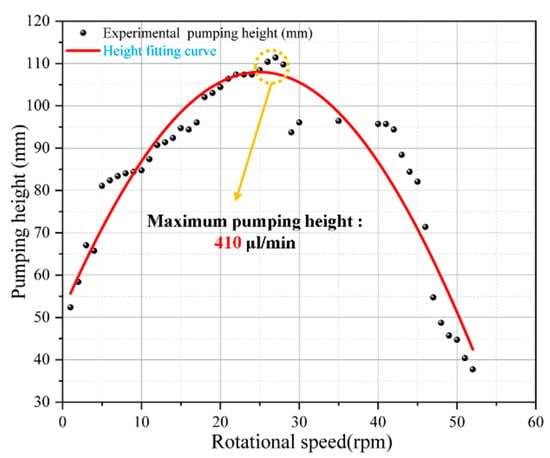
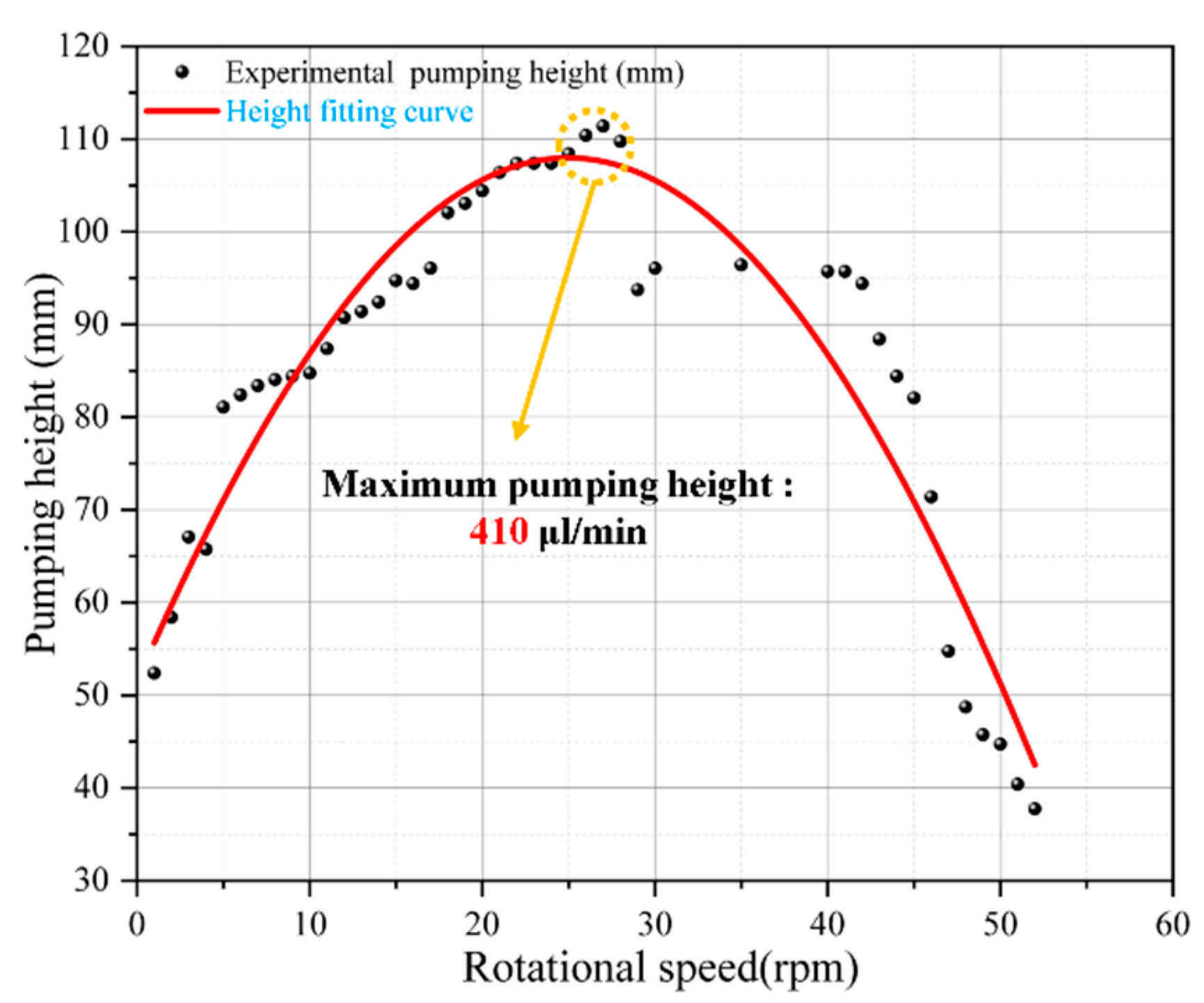
Figure 13.
Micropump pumping height at different speeds.
It can be seen from Figure 12 and Figure 13 that the pumping flow rate and pumping height of the micropump show an approximate parabolic general trend with the motor speed. When the pumping back pressure is 0 mm water column, the pumping flow rate that the micropump can achieve is the maximum pumping flow rate at this speed, and the highest motor speed that it can withstand. At the beginning, the pumping flow rate of the micropump increases with the acceleration of the motor speed. When the speed reaches approximately 15 rpm, the growth rate of the pumping flow rate slows down but still rises steadily. When the speed is 40 rpm, the pumping flow rate reaches a maximum of approximately 410 μL/min. When the motor speed is further accelerated, the micropump pumping flow rate drops rapidly, and when the speed reaches 51 rpm, the micropump almost no longer pumps.
The pumping height that the micropump can achieve under different motor speeds first increases with the acceleration of the speed. When the speed is 27 rpm, the maximum pumping height reaches approximately 111.4 mm water column. When the motor speed is further accelerated, the pumping height of the micropump drops from the water column height of approximately 110 mm to approximately 95 mm, and the speed is in the range of 30 rpm–40 rpm. When the speed exceeds 40 rpm, the pumping height of the micropump decreases rapidly, and the pumping height drops to approximately 35 mm water column when it reaches 50 rpm, at which time it is difficult to achieve pumping.
The viscous resistance of the fluid is affected by the speed. At low rotational speed, the viscous resistance of the ferrofluid blade in the pump cavity is small, and the stability of the ferrofluid blade is good. At this time, the pumping flow rate and pumping height of the micropump are positively correlated with the rotational speed of the ferrofluid blade. With the increase in the rotational speed of the ferrofluid blade, the viscous resistance it is subjected to gradually increases, which makes it adhere to the inner wall of the pump cavity more and more during the movement, so that it finally breaks up, resulting in the rapid decline of the pumping capability of the micropump. When the ferrofluid blade in the pump cavity can no longer form a seal with the inner wall of the pump cavity, and can not completely separate the inlet cavity and the outlet cavity, the pumping capability of the micropump will rapidly decline until the pumping failure. In addition, when the viscous resistance increases, the motion of the ferrofluid blade will lag the RPMs, thus reducing the pumping capability of the micropump. Moreover, the experiment is carried out under the condition of continuous pumping. The long-term continuous motion of the ferrofluid blade and the interaction with the pumped liquid (water) will accelerate the emulsification and volatilization of the coal-oil-based ferrofluid, resulting in partial failure of the ferrofluid, thus affecting the stability of the ferrofluid blade.
5. Results and Discussion
The magnetic field distribution in the pump chamber of the micropump is effectively reflected by numerical analysis of the magnetic field. The effective magnetic field ring width generated by the FPM in the pump cavity is approximately 0.75 mm. This provides an effective reference for the design parameter adjustment of the ferrofluid micropump. Effectively ensure the steady formation of ferrofluid blade, and ensure that it can realize the separation of pump cavity, and then play a role in inhibiting reflux.
This paper presents a double-rotating ferrofluid vane micropump with built-in fixed magnet, which can be successfully pumped through experiments. The pumping process is consistent with the design expectation, and the ferrofluid blade formed by the double driving magnets can drive the pumped liquid while achieving complete isolation of the inlet and outlet channels. The pumping flow rate and pumping height show a general trend of approximate parabola with the motor speed. When the speed is 40 rpm, the maximum pumping flow rate is approximately 410 μL/min. When the speed is 27 rpm, its pumping height reaches a maximum of approximately 111.4 mm water column.
Table 3 shows a comparison between the ferrofluid micropump proposed in this study and the ferrofluid micropump in other references. It can be seen from the table that this design has certain advantages in terms of structural dexterity, and has a high maximum pumping flow rate, but the maximum pumping back pressure is slightly lower. A possible important factor contributing to the low pumping back pressure of the micropump: according to the magnetization curve 1 of the ferrofluid, it can be seen that the real magnetic field strength in the pump cavity is not enough to make the ferrofluid in the pump cavity reach the state of saturation magnetization, which results in the rigidity of the ferrofluid blade formed in the pump cavity not reaching the maximum strength, which is not enough to overcome the high pumping back pressure. Therefore, to improve the pumping back pressure of the ferrofluid micropump, it is necessary to provide stronger magnetic field strength in the pump chamber. Moreover, the magnetic field transmission of the unilateral magnetic source in the pump cavity decays rapidly with distance (as shown in Figure 10), so the unilateral magnetic source can be replaced with a bilateral magnetic source.
Table 3.
Comparison of the performance of ferrofluid micropumps.
However, the magnetic field at the spatial location of interest is not sufficient to provide the expected strength, which limits the magneto–liquid magnetization process. However, when the magnetic particles are disturbed by heat, the dynamic properties of the particles and the surrounding fluid change, and the additional viscous dissipation caused by the single orientation of the particles decrease. The apparent viscosity of the magnetic fluid is reduced, which in turn facilitates ferrofluid drive and prevents “wall hanging”. In conclusion, in addition to the special high backpressure environment, there is no need to pursue too high a magnetic field strength in the pump cavity of the FFMPs, and appropriately reducing the magnetization of the ferrofluid vane is beneficial to flexible drive and prolonging the service life of the FFMPs.
Since the ferrofluid micropump was first proposed, the structure of the micropump has been greatly simplified, integration has been greatly improved, and the reflux problem has been better addressed. Micropumps with high stability, the ability to achieve a wide flow rate range, and the ability to withstand high pumping back pressure and high speed are being developed. These are subject to the stability of the ferrofluid blade (ferrofluid plug) in the pump cavity. The stability of the ferrofluid blade in the cavity can be improved through the ferrofluid itself and the external magnetic field. Therefore, in the selection and preparation of ferrofluid, we can choose high-stability ferrofluids, such as fluoroether-based ferrofluids, but we still need to consider the viscosity and other issues. The improvement of the external magnetic field depends on the compactness of the overall structure and the strength of the magnetic source. Although using an electromagnetic field has problems such as high voltage, it still shows excellent control performance as an external magnetic source for good micropumps.
Author Contributions
Methodology, Y.W., D.L., F.C. and Q.Z.; Validation, Y.W. and J.Q.; Formal analysis, D.L. and Q.Z.; Investigation, D.L., F.C., Q.Z., X.L., C.Y., X.H. and Y.Z.; Resources, Z.L.; Data curation, Y.W. and F.C.; Writing—original draft, Y.W.; Writing—review & editing, D.L.; Supervision, Z.L.; Project administration, Z.L.; Funding acquisition, Z.L. All authors have read and agreed to the published version of the manuscript.
Funding
This work was financially supported by National Natural Science Foundation of China [grant number 52379092], Chengdu Science and Technology Project (2024-YF09-00003-GX), Qinghai Province “Kunlun talents. High-end Innovation and Entrepreneurship Talent Program” Qinghai Institute of Technology Talent Introduction research special funding [(W)2023-QLGKLYCZX-032], China Yangtze Power Co., Ltd. [2324020007].
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare that this study received funding from China Yangtze Power Co., Ltd. The funder was not involved in the study design, collection, analysis, interpretation of data, the writing of this article or the decision to submit it for publication.
References
- Wang, Z. Microsystem Design and Fabrication, 2nd ed.; Tsinghua University Press: Beijing, China, 2015. [Google Scholar]
- Mohith, S.; Karanth, P.N.; Kulkarni, S.M. Recent trends in mechanical micropumps and their applications: A review. Mechatronics 2019, 60, 34–55. [Google Scholar] [CrossRef]
- Chaimayo, C.; Kaewnaphan, B.; Tanlieng, N.; Athipanyasilp, N.; Sirijatuphat, R.; Chayakulkeeree, M.; Angkasekwinai, N.; Sutthent, R.; Puangpunngam, N.; Tharmviboonsri, T.; et al. Rapid SARS-CoV-2 antigen detection assay in comparison with real-time RT-PCR assay for laboratory diagnosis of COVID-19 in Thailand. Virol. J. 2020, 17, 177. [Google Scholar] [CrossRef]
- Adampourezare, M.; Dehghan, G.; Hasanzadeh, M.; Feizi, M.A. Application of lateral flow and microfluidic bio-assay and biosensing towards identification of DNA-methylation and cancer detection: Recent progress and challenges in biomedicine. Biomed. Pharmacother. 2021, 141, 111845. [Google Scholar] [CrossRef]
- Koh, A.; Kang, D.; Xue, Y.; Lee, S.; Pielak, R.M.; Kim, J.; Hwang, T.; Min, S.; Banks, A.; Bastien, P.; et al. A soft, wearable microfluidic device for the capture, storage, and colorimetric sensing of sweat. Sci. Transl. Med. 2016, 8, ra165–ra366. [Google Scholar] [CrossRef] [PubMed]
- Sultana, N.; Gunning, S.; Furst, S.J.; Garrard, K.P.; Dow, T.A.; Vinueza, N.R. Direct analysis of textile dyes from trace fibers by automated microfluidics extraction system coupled with Q-TOF mass spectrometer for forensic applications. Forensic Sci. Int. 2018, 289, 67–74. [Google Scholar] [CrossRef] [PubMed]
- Golozar, M.; Chu, W.K.; Casto, L.D.; McCauley, J.; Butterworth, A.L.; Mathies, R.A. Fabrication of high-quality glass microfluidic devices for bioanalytical and space flight applications. MethodsX 2020, 7, 101043. [Google Scholar] [CrossRef] [PubMed]
- Pothuri, C.; Azharudeen, M.; Subramani, K. Rapid mixing in microchannel using standing bulk acoustic waves. Phys. Fluids 2019, 31, 122001. [Google Scholar] [CrossRef]
- Laser, D.J.; Santiago, J.G. A review of micropumps. J. Micromech. Microeng. 2004, 14, R35–R64. [Google Scholar] [CrossRef]
- Doganay, S.; Cetin, L.; Ezan, M.A.; Turgut, A. A rotating permanent magnetic actuator for micropumping devices with magnetic nanofluids. J. Micromech. Microeng. 2020, 30, 075012. [Google Scholar] [CrossRef]
- Spencer, W.J.; Corbett, W.T.; Dominguez, L.R.; Shafer, B.D. An electronically controlled piezoelectric insulin pump and valves. IEEE T. Son. Ultrason. 1978, 25, 153–156. [Google Scholar] [CrossRef]
- Das, P.K.; Hasan, A.B.M.T. Mechanical micropumps and their applications: A review. In Proceedings of the 7th BSME International Conference on Thermal Engineering, Dhaka, Bangladesh, 22–24 December 2016; AIP Publishing LLC: New York, NY, USA, 2017; pp. 917–942. [Google Scholar]
- Forouzandeh, F.; Arevalo, A.; Alfadhel, A.; Borkholder, D.A. A review of peristaltic micropumps. Sens. Actuators 2021, 326, 112602. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.H.; Wang, Y.; Huang, J. Advances in valveless piezoelectric pump with cone-shape. Chin. J. Mech. Eng. 2017, 30, 766–781. [Google Scholar] [CrossRef]
- Okamoto, Y.; Ryoson, H.; Fujimoto, K.; Ohba, T.; Mita, Y. On-chip CMOS-MEMS-based electroosmotic flow micropump integrated with high-voltage generator. J. Microelectromech. Syst. 2019, 29, 86–94. [Google Scholar] [CrossRef]
- Pollack, M.G.; Paik, P.Y.; Shenderov, A.D.; Pamula, V.K.; Dietrich, F.S.; Fair, R.B. Investigation of electrowetting-based microfluidics for real-time PCR applications. In Proceedings of the Seventh International Conference on Miniaturized Chemical and Biochemical Analysis Systems (MicroTAS’03), Squaw Valley, CA, USA, 5–9 October 2003; pp. 611–619. [Google Scholar]
- Qu, Y.; Zhou, J. Lumped parameter model and numerical model of vapor bubble–driven valve-less micro-pump. Adv. Mech. Eng. 2017, 9, 1687814017695958. [Google Scholar] [CrossRef]
- Gusenbauer, M.; Mazza, G.; Posnicek, T.; Brandl, M.; Schrefl, T. Magnetically actuated circular displacement micropump. Int. J. Adv. Manuf. Technol. 2018, 95, 3575–3588. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, J.; Li, Z.; Yan, S.; Li, W. Effect of the surface coating of carbonyl iron particles on the dispersion stability of magnetorheological fluid. Sci. Rep. 2024, 14, 11358. [Google Scholar] [CrossRef] [PubMed]
- Fan, X.; Jiang, Y.; Li, M.; Zhang, Y.; Tian, C.; Mao, L.; Xie, H.; Sun, L.; Yang, Z.; Sitti, M. Scale-reconfigurable miniature ferrofluidic robots for negotiating sharply variable spaces. Sci. Adv. 2022, 8, eabq1677. [Google Scholar] [CrossRef]
- Miller, C.W.; Resler, E.L., Jr. Magnetic forces and the surface instability in ferromagnetic fluids. Phys. Fluids 1975, 18, 1112–1118. [Google Scholar] [CrossRef]
- Hatch, A.; Kamholz, A.E.; Holman, G.; Yager, P.; Bohringer, K.F. A ferrofluidic magnetic micropump. J. Microelectromech. Syst. 2001, 10, 215–221. [Google Scholar] [CrossRef]
- Chang, Y.J.; Hu, C.Y.; Lin, C.H. A microchannel immunoassay chip with ferrofluid actuation to enhance the biochemical reaction. Sens. Actuators B Chem. 2013, 182, 584–591. [Google Scholar] [CrossRef]
- Ashouri, M.; Behshad Shafii, M.; Moosavi, A. Theoretical and experimental studies of a magnetically actuated valveless micropump. J. Micromech. Microeng. 2017, 27, 015016. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, Z.; Yang, J.; Yang, J.; Li, D. A rotary ferrofluidic vane micropump with C shape baffle. Sens. Actuators B Chem. 2018, 263, 452–458. [Google Scholar] [CrossRef]
- Li, W.; Li, Z.; Han, W.; Li, Y.; Yan, S.; Zhao, Q.; Gu, Z. Pumping-velocity variation mechanisms of a ferrofluid micropump and structural optimization for reflow inhibition. Phys. Fluids 2023, 35, 052005. [Google Scholar]
- Shaker, S.; Hajjawi, M.; Khan, A. Effect of inlet and outlet angles on the flow performance of the ferrofluidic magnetic micropump. Cogent Eng. 2023, 10, 2158611. [Google Scholar] [CrossRef]
- Chi, C. Physical Basis and Application of Ferromagnetic Fluids; Beijing University of Aeronautics and Astronautics Press: Beijing, China, 2011. [Google Scholar]
- Li, W.; Li, Z.; Han, W.; Tan, S.; Yan, S.; Wang, D.; Yang, S. Time-mean equation and multi-field coupling numerical method for low-Reynolds-number turbulent flow in ferrofluid. Phys. Fluids 2023, 35, 125145. [Google Scholar] [CrossRef]
- Li, D.C. Theory and Application of Magnetic Liquid Seal; Science Press: Beijing, China, 2010; pp. 43–46. [Google Scholar]
- Stefania, F.; Musenich, R. Biot–Savart approach to analytical computation of magnetic fields and forces of CCT magnets. IEEE Trans. Appl. Supercond. 2021, 31, 4900308. [Google Scholar]
- Yamahata, C.; Chastellain, M.; Parashar, V.K.; Petri, A.; Hofmann, H.; Gijs, M.A. Plastic micropump with ferrofluidic actuation. J. Microelectromech. Syst. 2005, 14, 96–102. [Google Scholar] [CrossRef]
- Lee, C.Y.; Leong, J.C.; Wang, Y.N.; Fu, L.M. A ferrofluidic magnetic micropump for variable-flow-rate applications. Jpn. J. Appl. Phys. 2012, 51, 047201. [Google Scholar] [CrossRef]
- Shen, C. Design and Experimental Study of Valveless Magnetic Fluid Driver Micropump; Beijing University of Technology: Beijing, China, 2021. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).