
A Robust Hꝏ-Based State Feedback Control of Permanent Magnet Synchronous Motor Drives Using Adaptive Fuzzy Sliding Mode Observers

 ,
, 
Abstract
1. Introduction
- (1)
- Presence of high frequencies in the control signal;
- (2)
- High gain in the control loop.
- During the modeling of the PMSM motor, the model uncertainties are considered to be handled with the proposed control method. During the design of the proposed state feedback control, unlike the other state feedback control methods, model uncertainties are considered to make the control loop robust against these uncertainties. It is worth mentioning that the model uncertainties are considered to be in Lipschitz conditions, which is a special case in robust methods.
- Unlike the other state feedback control methods, in the proposed state feedback control, Hꝏ performance is guaranteed to eliminate the effects of disturbances on the control performance.
- The combination of fuzzy adaptive sliding mode observer and robust state feedback control is presented, for the first time, to impressively increase the robustness of the proposed control structure against uncertainties, disturbances, and sudden load changes.
2. Mathematical Model of the Motor
3. Suggested Strategy
3.1. Speed Controller
- (a)
- ⇒ , , where denotes the factor matrix of the tracking error and and denote the prescribed bounds. Also, denotes time related to the end of the interval.
- (b)
- Assuming , the dynamic behavior satisfies the asymptotical stability.
- (c)
- Assuming and , the following inequality is met:
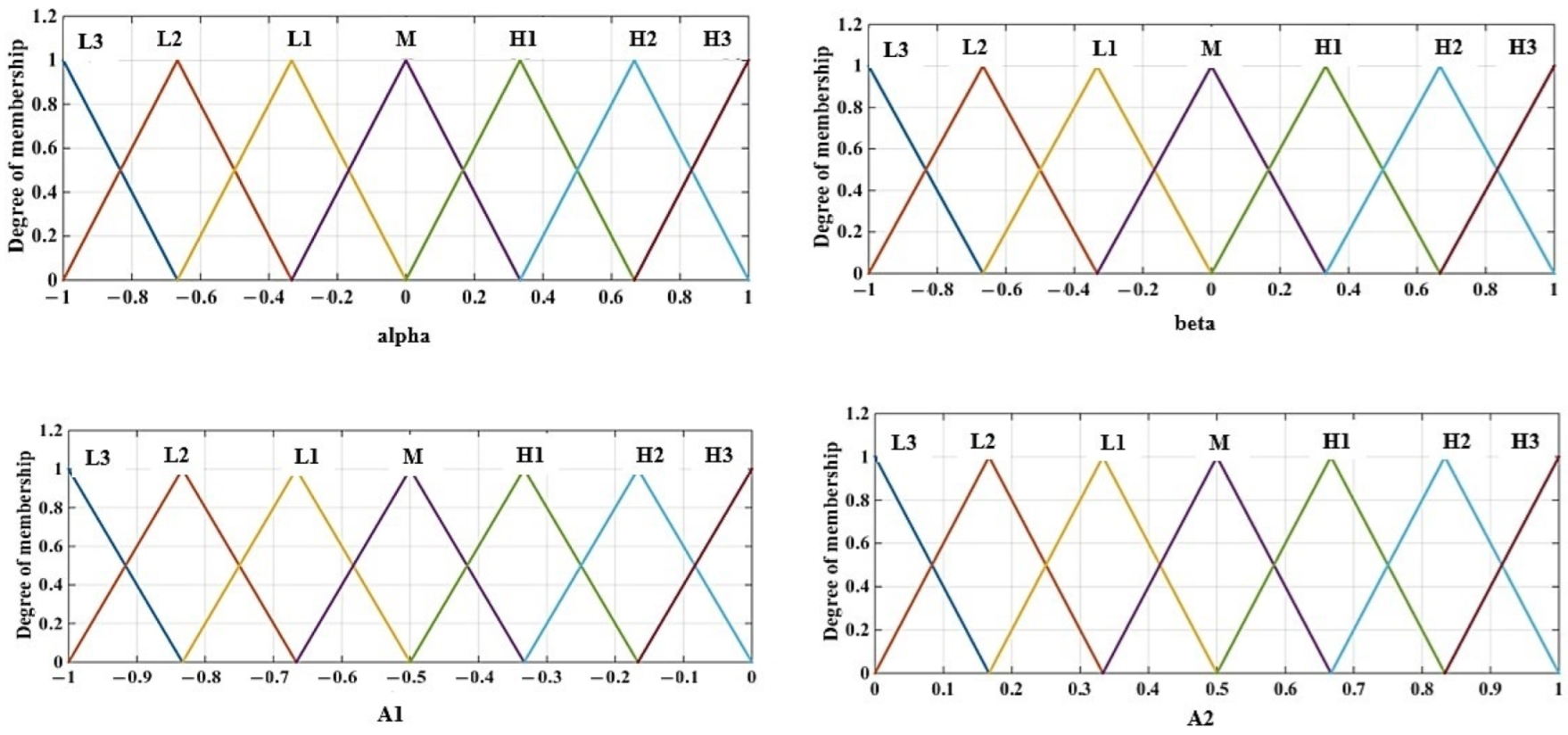
3.2. FASMO
3.3. Corrected Controller
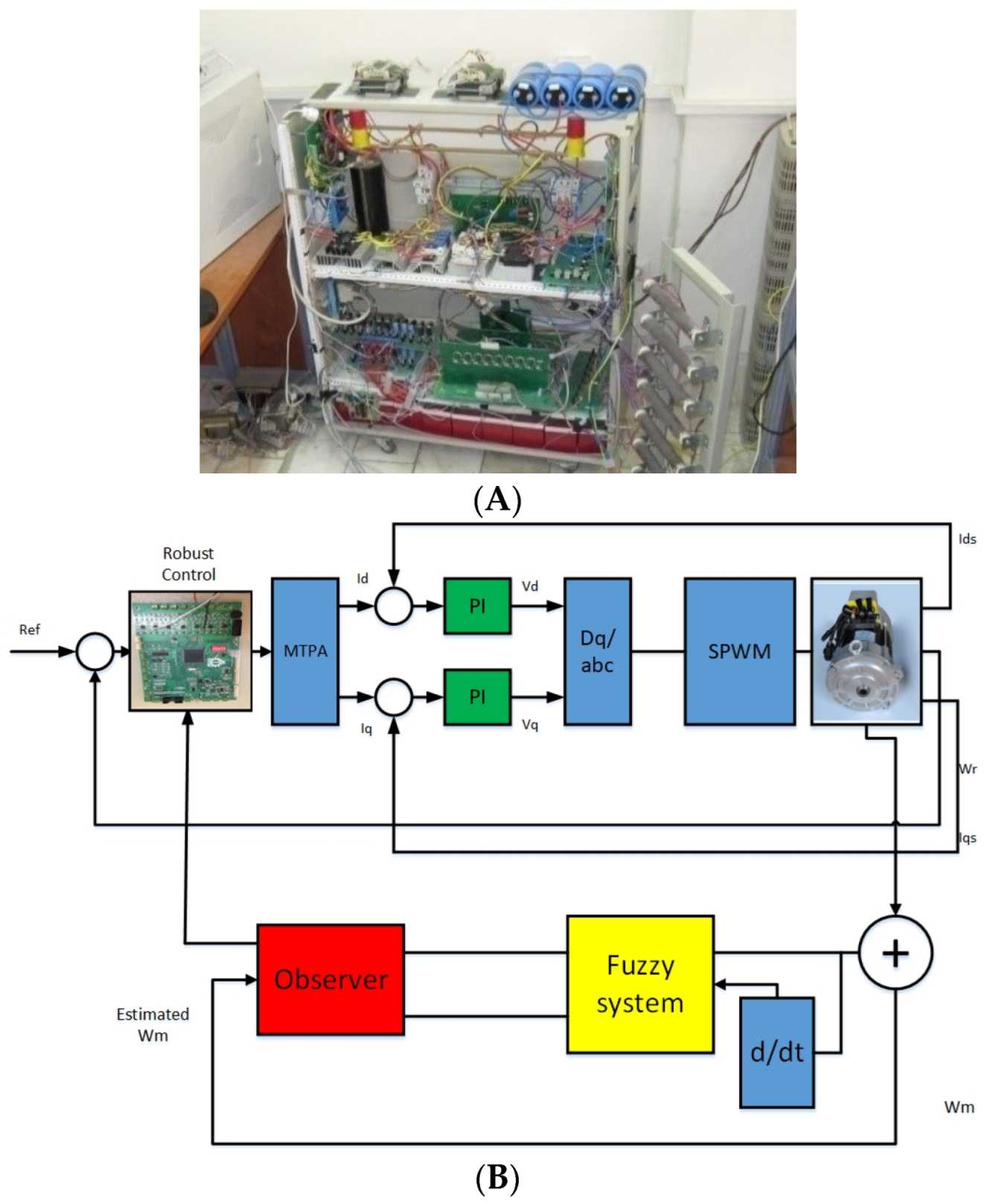
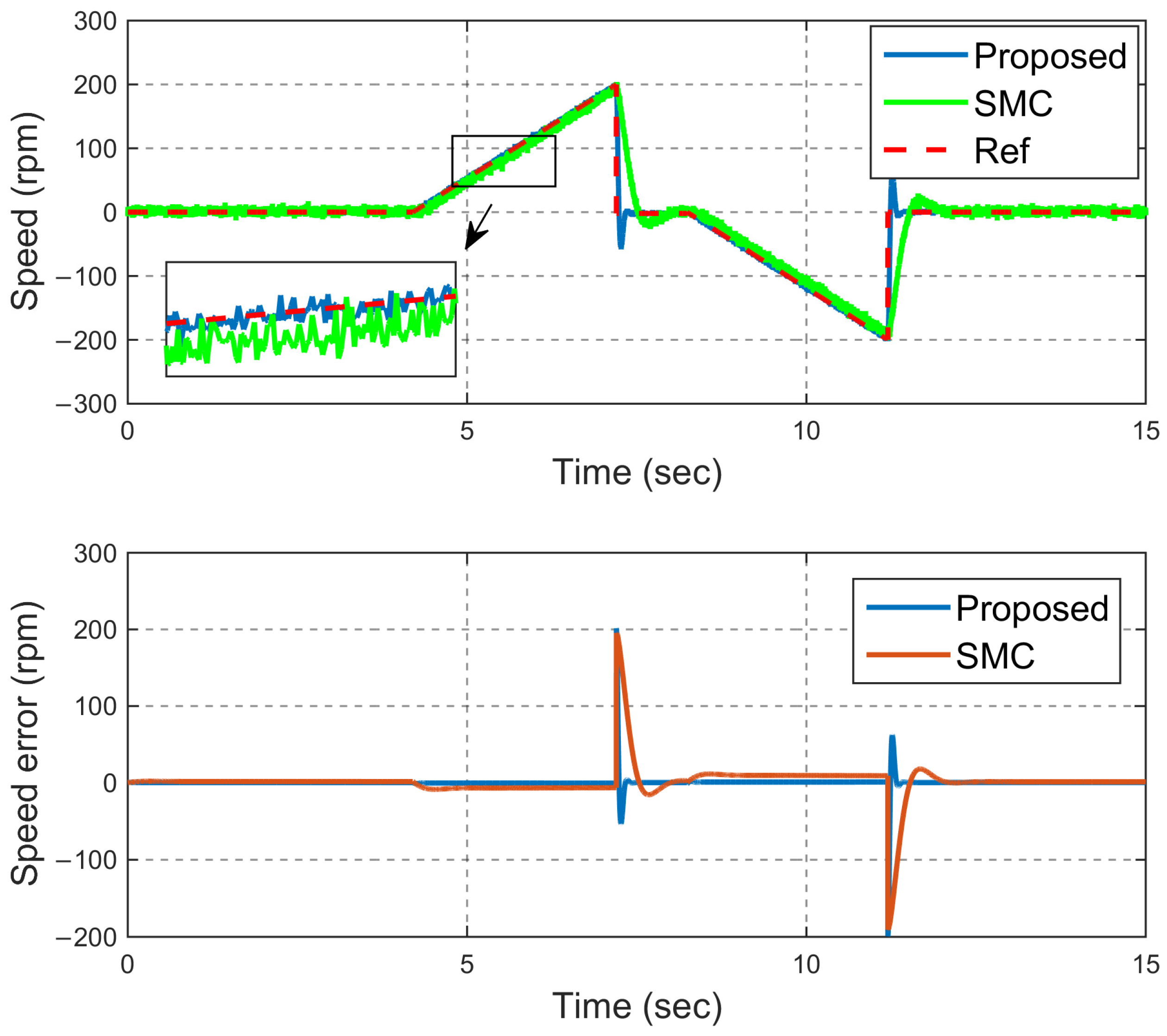
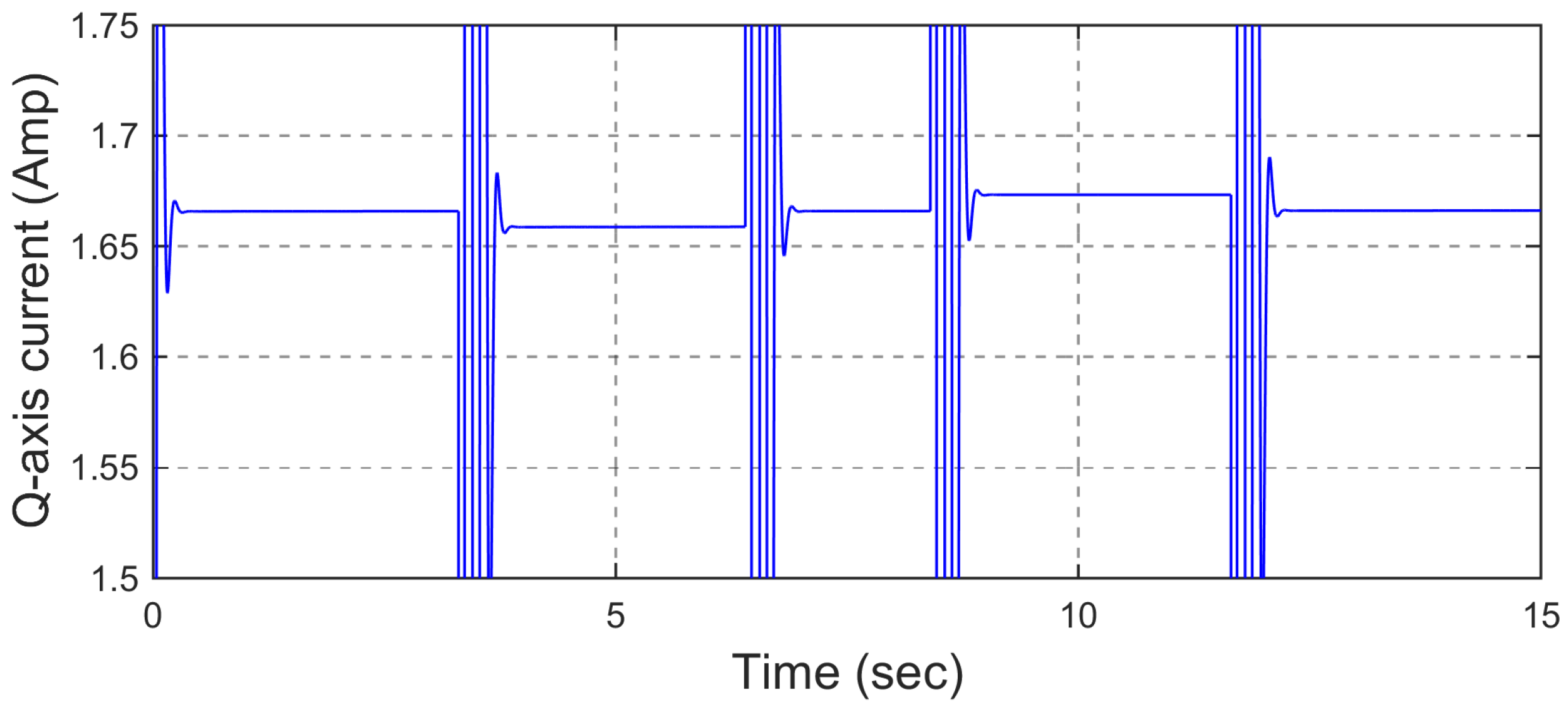
4. Experimental Results
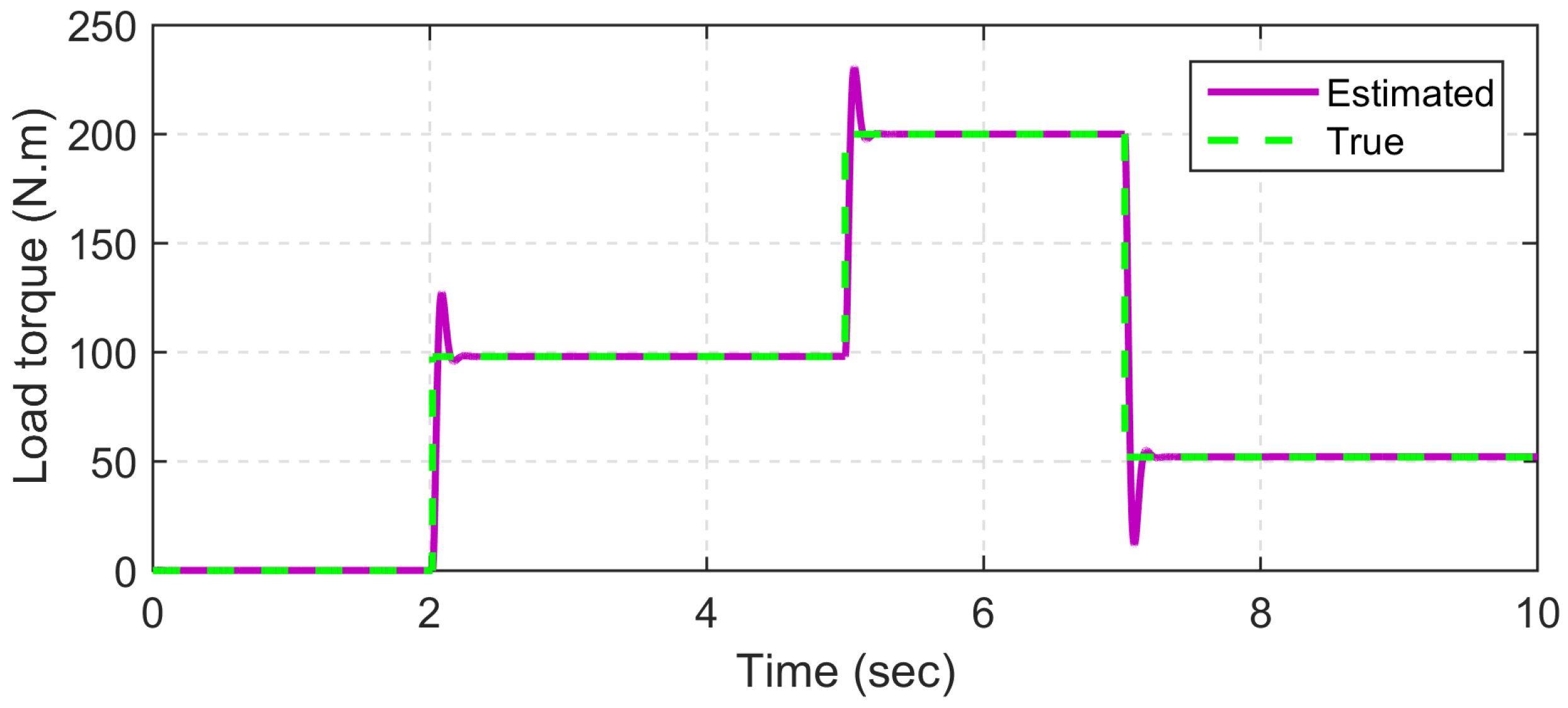
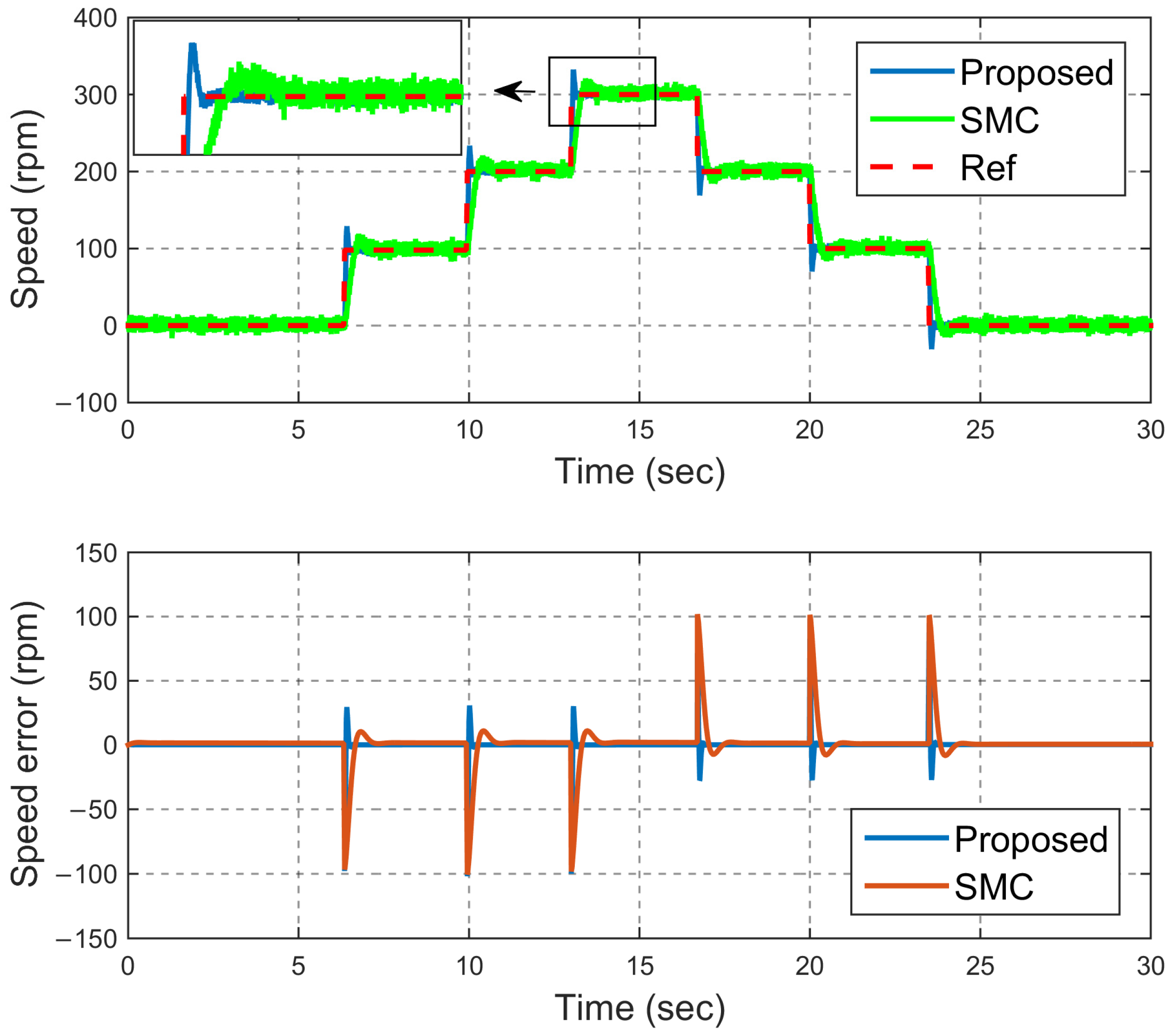
4.1. Scenario 1
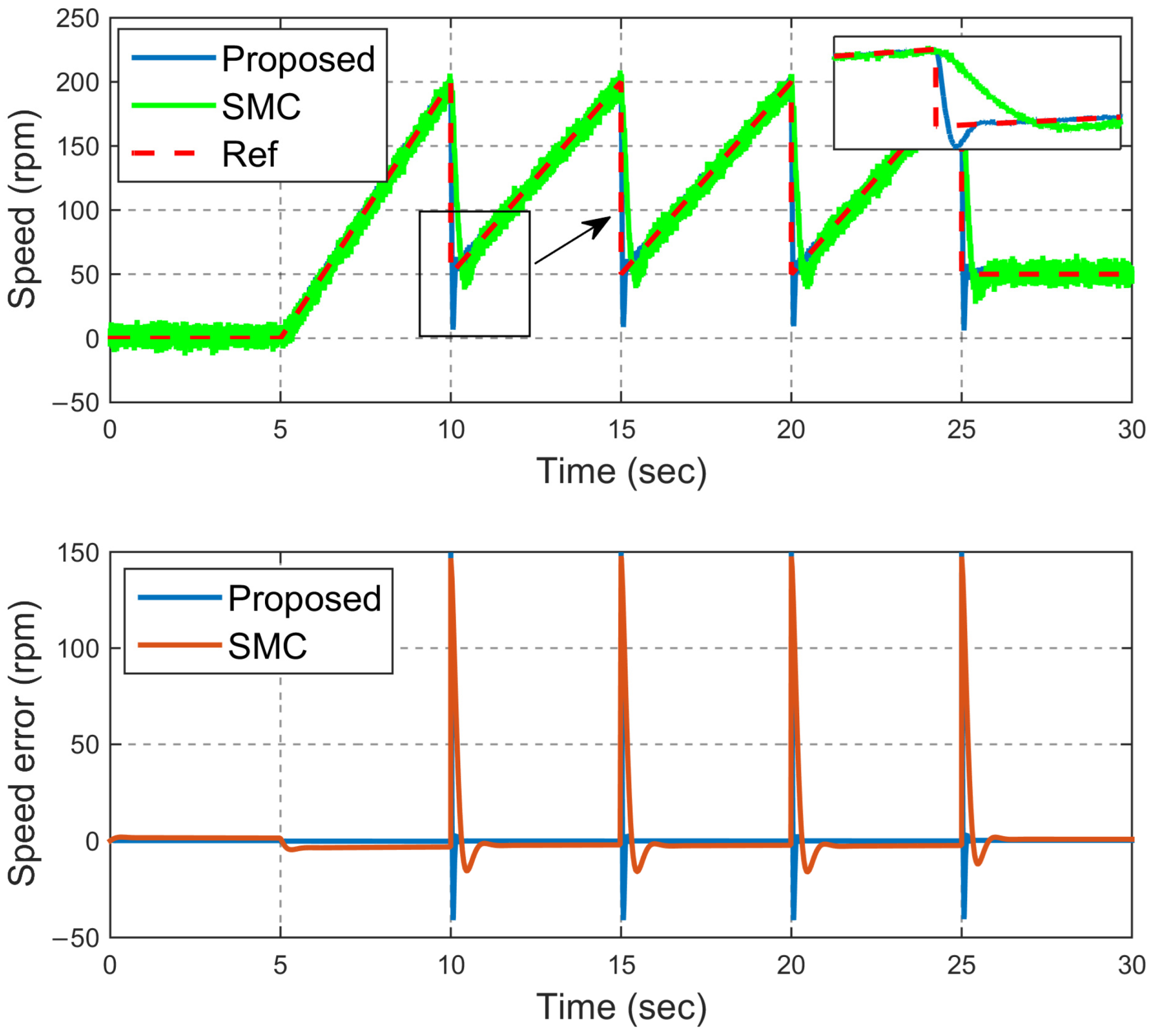
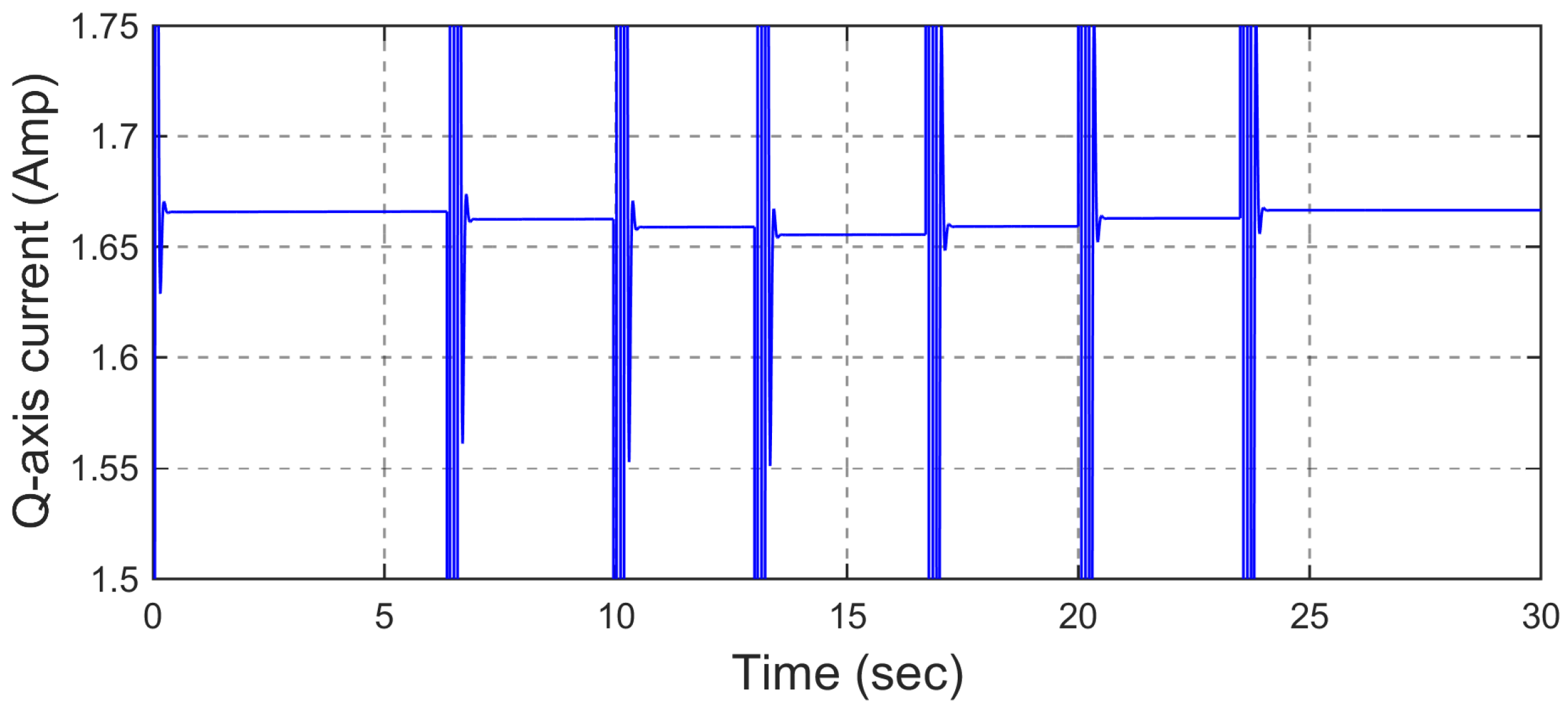
4.2. Scenario 2
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mei, M.; Cheng, S.; Li, L.; Mu, H.; Pei, Y. UKF-Based Observer Design for the Electric Brake Booster in Situations of Disturbance. Actuators 2023, 12, 94. [Google Scholar] [CrossRef]
- Wang, B.L.; Cai, Y.; Song, J.C.; Liang, Q.K. A Singular Perturbation Theory-Based Composite Control Design for a Pump-Controlled Hydraulic Actuator with Position Tracking Error Constraint. Actuators 2023, 12, 265. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, J.; Zheng, Z. Robust speed tracking control of permanent magnet synchronous linear motor based on a discrete-time sliding mode load thrust observer. IEEE Trans. Ind. Appl. 2022, 58, 4758–4767. [Google Scholar] [CrossRef]
- Accetta, A.; Cirrincione, M.; Pucci, M.; Sferlazza, A. Feedback linearization based nonlinear control of SynRM drives accounting for self-and cross-saturation. IEEE Trans. Ind. Appl. 2022, 58, 3637–3651. [Google Scholar] [CrossRef]
- Aiso, K.; Akatsu, K. High speed SRM using vector control for electric vehicle. CES Trans. Electr. Mach. Syst. 2020, 4, 61–68. [Google Scholar] [CrossRef]
- Dang, H.L.; Kwak, S. Review of health monitoring techniques for capacitors used in power electronics converters. Sensors 2020, 20, 3740. [Google Scholar] [CrossRef]
- Nasr, A.; Gu, C.; Bozhko, S.; Gerada, C. Performance enhancement of direct torque-controlled permanent magnet synchronous motor with a flexible switching table. Energies 2020, 13, 1907. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Xu, Z.; Cheng, M.; Hu, Y. Optimization of torque tracking performance for direct-torque-controlled PMSM drives with composite torque regulator. IEEE Trans. Ind. Electron. 2020, 67, 10095–10108. [Google Scholar] [CrossRef]
- Sabouni, E.; Merah, B.; Bousserhane, I.K. Adaptive backstepping controller design based on neural network for pmsm speed control. Int. J. Power Electron. Drive Syst. 2021, 12, 1940. [Google Scholar] [CrossRef]
- Zhang, L.; Ma, J.; Wu, Q.; He, Z.; Qin, T.; Chen, C. Research on PMSM speed performance based on fractional order adaptive fuzzy backstepping control. Energies 2023, 16, 6922. [Google Scholar] [CrossRef]
- Zhou, S.T.; Ma, J.Q.; Chen, C.S.; Qin, T.; He, Z.Q.; Wu, Q.M.; Liu, H.J.; Li, Y.J. The Speed Characters of PMSM with Advanced Precise Feedback Linearization Controller. J. Electr. Eng. Technol. 2024, 1–9. [Google Scholar] [CrossRef]
- Yi, P.; Wang, X.; Chen, D.; Sun, Z. PMSM current harmonics control technique based on speed adaptive robust control. IEEE Trans. Transp. Electrif. 2021, 8, 1794–1806. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, L.; Ji, W. Improved non-singular fast terminal sliding mode control with disturbance observer for PMSM drives. IEEE Trans. Transp. Electrif. 2021, 7, 2753–2762. [Google Scholar] [CrossRef]
- Ünsal, S.; Aliskan, I. Investigation of performance of fuzzy logic controllers optimized with the hybrid genetic-gravitational search algorithm for PMSM speed control. Autom. Časopis Za Autom. Mjer. Elektron. Računarstvo I Komun. 2022, 63, 313–327. [Google Scholar] [CrossRef]
- Masoud, U.M.M.; Tiwari, P.; Gupta, N. Designing of an enhanced fuzzy logic controller of an interior permanent magnet synchronous generator under variable wind speed. Sensors 2023, 23, 3628. [Google Scholar] [CrossRef]
- Abdulghani, M.M.; Al-Aubidy, K.M.; Ali, M.M.; Hamarsheh, Q.J. Wheelchair neuro fuzzy control and tracking system based on voice recognition. Sensors 2020, 20, 2872. [Google Scholar] [CrossRef] [PubMed]
- Shanthi, R.; Kalyani, S.; Devie, M. Design and performance analysis of adaptive neuro-fuzzy controller for speed control of permanent magnet synchronous motor drive. Soft Comput. 2021, 25, 1519–1533. [Google Scholar] [CrossRef]
- Hoai, H.K.; Chen, S.C.; Chang, C.F. Realization of the neural fuzzy controller for the sensorless PMSM drive control system. Electronics 2020, 9, 1371. [Google Scholar] [CrossRef]
- Gao, P.; Zhang, G.; Lv, X. Model-free hybrid control with intelligent proportional integral and super-twisting sliding mode control of PMSM drives. Electronics 2020, 9, 1427. [Google Scholar] [CrossRef]
- Liu, J.; Yang, J.; Li, S.; Wang, X. Single-loop robust model predictive speed regulation of PMSM based on exogenous signal preview. IEEE Trans. Ind. Electron. 2023, 70, 12719–12729. [Google Scholar] [CrossRef]
- Kim, D.J.; Kim, B. Linear Matrix Inequality-Based Robust Model Predictive Speed Control for a Permanent Magnetic Synchronous Motor with a Disturbance Observer. Energies 2024, 17, 869. [Google Scholar] [CrossRef]
- Azizi Moghaddam, H.; Rezaei, O.; Vahedi, A.; Saeidi, M.; Ehsani, M. A continuous control set of the model predictive controller of PMA-SynRM machine for high-performance flywheel energy storage system. Int. J. Dyn. Control. 2022, 10, 1553–1566. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, H.; Wang, H.; Shao, K.; Wang, G.; Yazdani, A. Continuous adaptive fast terminal sliding mode-based speed regulation control of PMSM drive via improved super-twisting observer. IEEE Trans. Ind. Electron. 2023, 71, 5105–5115. [Google Scholar] [CrossRef]
- Yang, T.; Deng, Y.; Li, H.; Sun, Z.; Cao, H.; Wei, Z. Fast integral terminal sliding mode control with a novel disturbance observer based on iterative learning for speed control of PMSM. ISA Trans. 2023, 134, 460–471. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Wang, Z. Simple robust model predictive current control for PMSM drives without flux-linkage parameter. IEEE Trans. Ind. Electron. 2022, 70, 3515–3524. [Google Scholar] [CrossRef]
- Lin, F.J.; Chiu, S.L. Adaptive fuzzy sliding mode control for PM synchronous servo motor drives. IEE Proc. Control Theory Appl. 1998, 145, 63–72. [Google Scholar] [CrossRef]
- Xu, W.; Junejo, A.K.; Tang, Y.; Shahab, M.; Habib, H.U.R.; Liu, Y.; Huang, S. Composite speed control of PMSM drive system based on finite time sliding mode observer. IEEE Access 2021, 9, 151803–151813. [Google Scholar] [CrossRef]
- Hu, J.; Liu, L.; Ma, D.W.; Ullah, N. Adaptive nonlinear feedback control of chaos in permanent-magnet synchronous motor system with parametric uncertainty. Proc. Inst. Mech. Eng. Part C 2015, 229, 2314–2323. [Google Scholar] [CrossRef]
- Jia, L.; Li, Y.; Du, J.; Yuan, S. Robust L2/L∞ control for uncertain singular systems with time varying delay. Prog. Nat. Sci. 2008, 18, 1015–1021. [Google Scholar]
- Abdissa, C.M. Improved model predictive speed control of a PMSM via Laguerre functions. Math. Probl. Eng. 2024, 2024, 5562771. [Google Scholar] [CrossRef]
- Mohd Zaihidee, F.; Mekhilef, S.; Mubin, M. Robust speed control of PMSM using sliding mode control (SMC)—A review. Energies 2019, 12, 1669. [Google Scholar] [CrossRef]
- Chen, Y.T.; Yu, C.S.; Chen, P.N. Feedback linearization based robust control for linear permanent magnet synchronous motors. Energies 2020, 13, 5242. [Google Scholar] [CrossRef]
- Ruan, Z.; Hu, J.; Mei, J. Robust optimal triple event-triggered intermittent control for uncertain input-constrained nonlinear systems. Commun. Nonlinear Sci. Numer. Simul. 2024, 129, 107718. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L3 | L2 | L1 | M | H1 | H2 | H3 | ||
|---|---|---|---|---|---|---|---|---|
| L3 | L3 | L2 | L1 | M | L1 | L2 | L3 | |
| L2 | L2 | L1 | M | H1 | M | L1 | L2 | |
| L1 | L1 | M | H1 | H2 | H1 | M | L1 | |
| M | M | H1 | H2 | H3 | H2 | H1 | M | |
| H1 | L1 | M | H1 | H2 | H1 | M | L1 | |
| H2 | L2 | L1 | M | H1 | M | L1 | L2 | |
| H3 | L3 | L2 | L1 | M | L1 | L2 | L3 | |
| L3 | L2 | L1 | M | H1 | H2 | H3 | ||
|---|---|---|---|---|---|---|---|---|
| L3 | H3 | H2 | H1 | M | H1 | H2 | H3 | |
| L2 | H2 | H1 | M | L1 | M | H1 | H2 | |
| L1 | H1 | M | L1 | L2 | L1 | M | H1 | |
| M | M | L1 | L2 | L3 | L2 | L1 | M | |
| H1 | H1 | M | L1 | L2 | L1 | M | H1 | |
| H2 | H2 | H1 | M | L1 | M | H1 | H2 | |
| H3 | H3 | H2 | H1 | M | H1 | H2 | H3 | |
| Factor | Value |
|---|---|
| Nominal speed | 700 rpm |
| Nominal torque | 80 Nm |
| Rating | 50 kW |
| Resistance in stator | 7.8 mΩ |
| Inductance in stator | 0.45 mH |
| Flux linkage | 100 mWb |
| Number of poles | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tahami, H.; Saberi, S.; Ali, B.M.; AbdulAmeer, S.; Abdul Hussein, A.H.; Chaoui, H. A Robust Hꝏ-Based State Feedback Control of Permanent Magnet Synchronous Motor Drives Using Adaptive Fuzzy Sliding Mode Observers. Actuators 2024, 13, 307. https://doi.org/10.3390/act13080307
Tahami H, Saberi S, Ali BM, AbdulAmeer S, Abdul Hussein AH, Chaoui H. A Robust Hꝏ-Based State Feedback Control of Permanent Magnet Synchronous Motor Drives Using Adaptive Fuzzy Sliding Mode Observers. Actuators. 2024; 13(8):307. https://doi.org/10.3390/act13080307
Chicago/Turabian StyleTahami, Hamed, Sajad Saberi, Bashar Mahmood Ali, Sabah AbdulAmeer, Abbas Hameed Abdul Hussein, and Hicham Chaoui. 2024. "A Robust Hꝏ-Based State Feedback Control of Permanent Magnet Synchronous Motor Drives Using Adaptive Fuzzy Sliding Mode Observers" Actuators 13, no. 8: 307. https://doi.org/10.3390/act13080307
APA StyleTahami, H., Saberi, S., Ali, B. M., AbdulAmeer, S., Abdul Hussein, A. H., & Chaoui, H. (2024). A Robust Hꝏ-Based State Feedback Control of Permanent Magnet Synchronous Motor Drives Using Adaptive Fuzzy Sliding Mode Observers. Actuators, 13(8), 307. https://doi.org/10.3390/act13080307