
Diagnosis of Power Switch Faults in Three-Phase Permanent Magnet Synchronous Motors via Current-Signature Technique



Abstract
1. Introduction
- Model-based methods;
- Signal-based methods;
- Data-driven methods.
- The developed method relies on online ellipse fittings of the current phasor trajectory in the Clarke plane during constant speed operations of the motor, using the geometrical characteristics of the reconstructed ellipse as fault symptoms. The FDI algorithm elaborates the minimum number of measurements that permits the detection and isolation of the fault within a fraction of the electric period;
- The algorithm, formerly adopted in a previous work by the authors, for the FDI of inter-turn short-circuits of PMSM phases [42] is here extended to power switch faults;
- As a relevant case study, the FDI performances are assessed by simulating the failure transients related to power switch faults in a high-speed PMSM employed for the propulsion of a modern lightweight fixed-wing UAV.
2. Materials and Methods
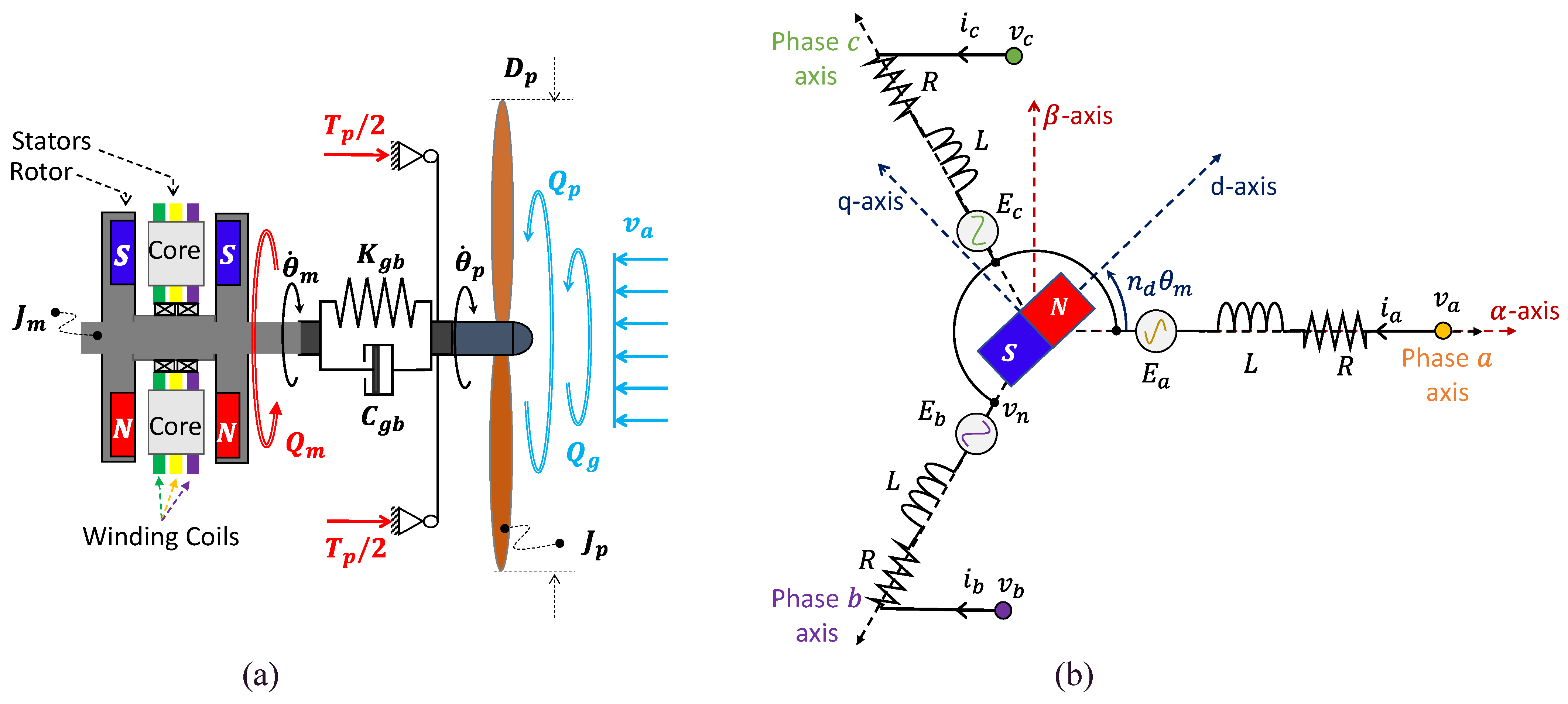
2.1. PMSM Electrical Modelling
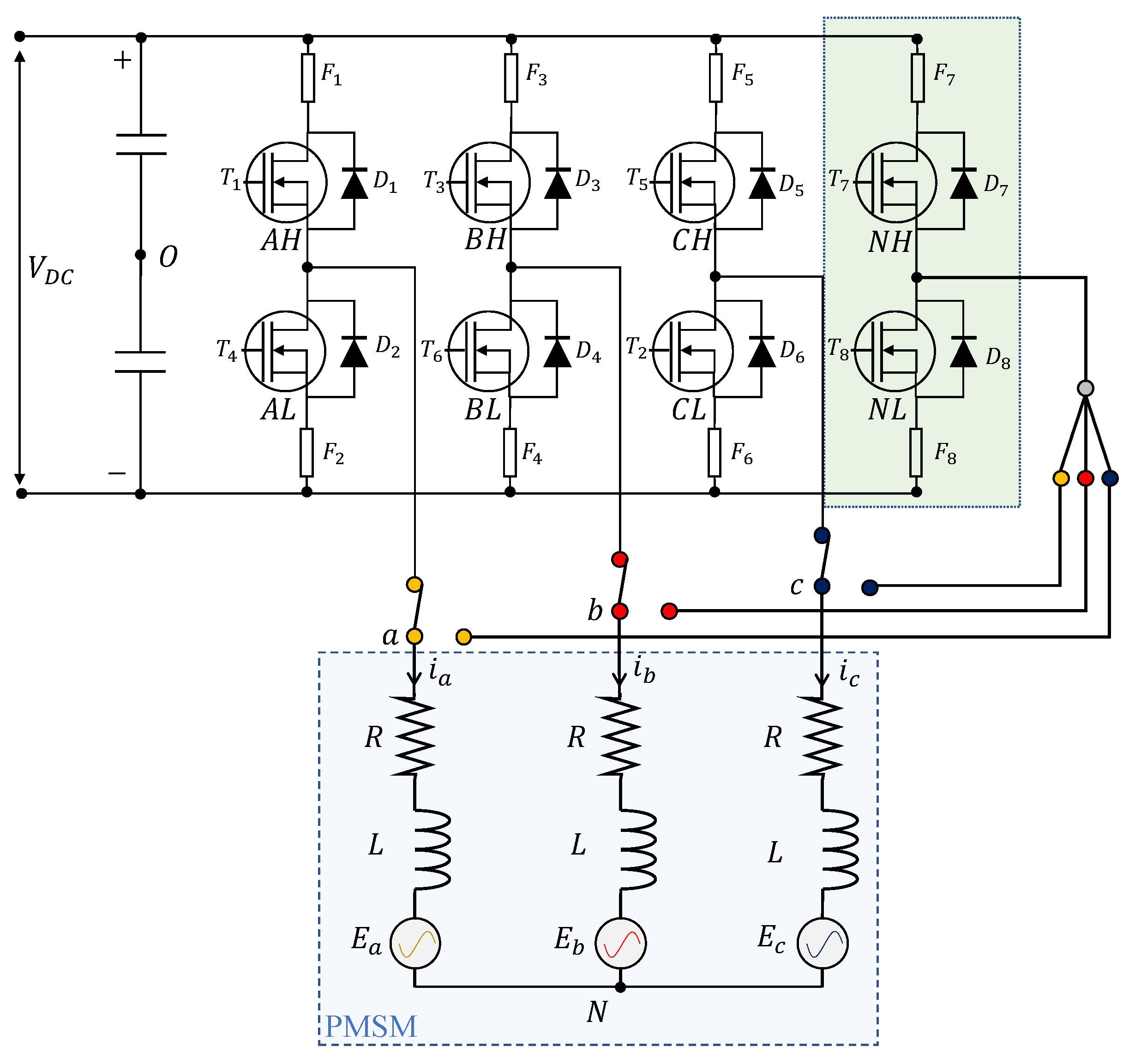
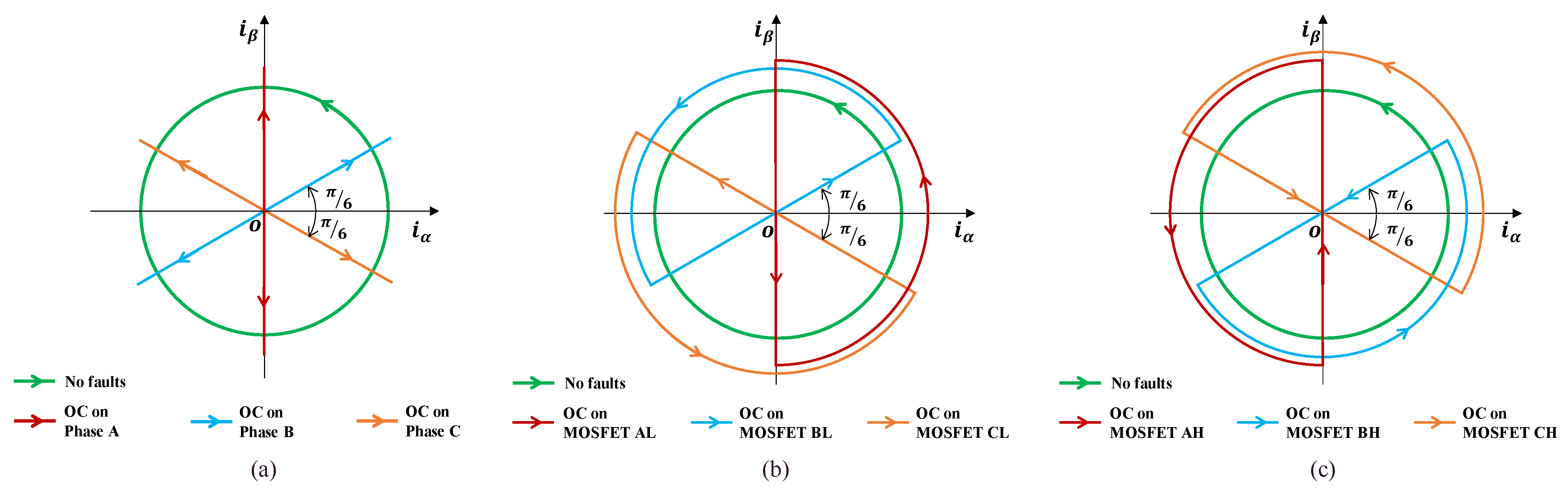
2.2. Current Signature in Clarke Plane in Case of Open-Circuit Power Switches
2.2.1. Behaviour with Open-Circuit of a Motor Phase
2.2.2. Behaviour with Open-Circuit of a Power Switch
2.3. Fault Diagnosis
2.4. Application to a PMSM for Lightweight Fixed-Wing UAV Propulsion
- ◦
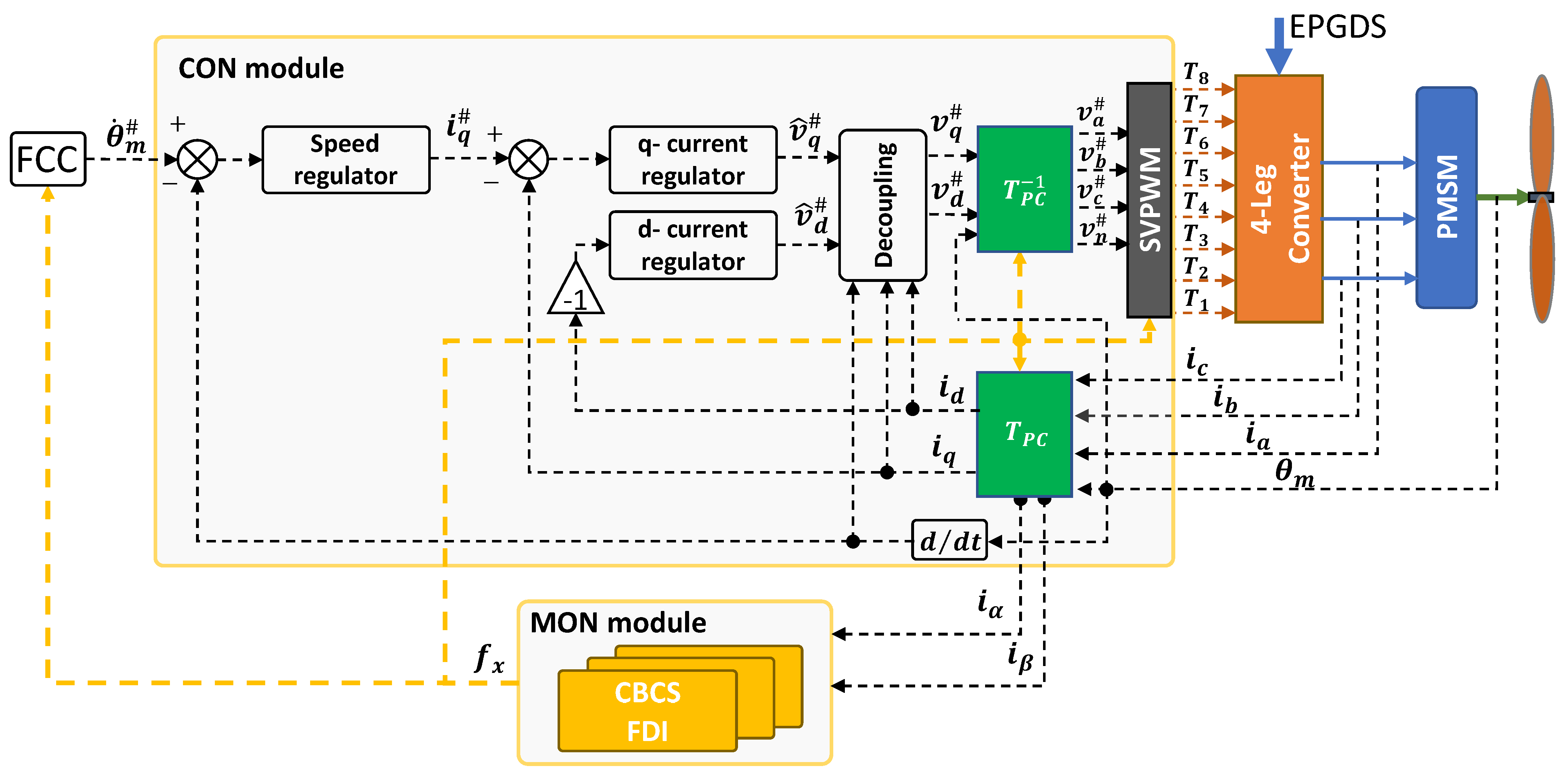
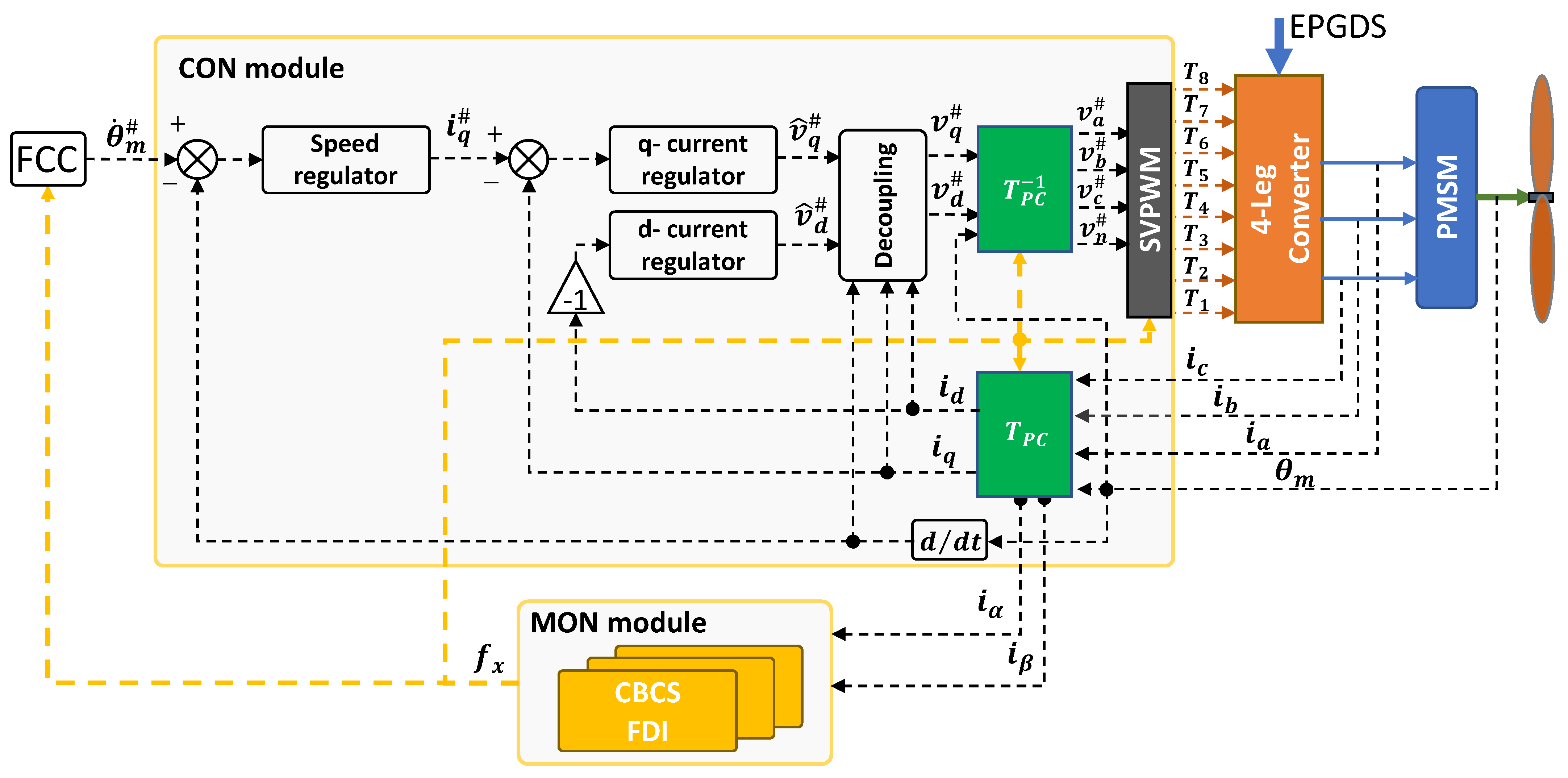
- A control/monitoring electronic box, for the implementation of the closed-loop control and health-monitoring functions;
- ◦
- A four-leg converter;
- ◦
- Three current sensors, one per motor phase;
- ◦
- An angular position sensor, measuring the motor angle;
- ◦
- A power supply unit;
- ◦
- Two connectors for the data and power supply interfaces, related to the UAV flight control computer and the UAV electrical power system, respectively.
2.4.1. Electronic Control Unit
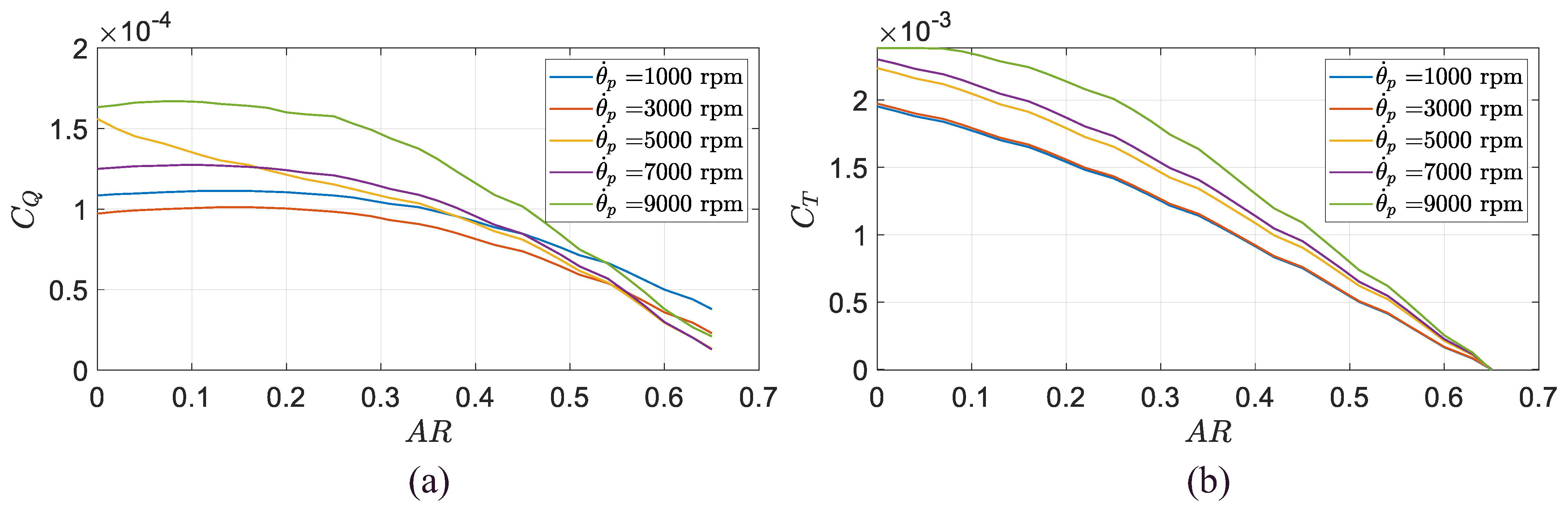
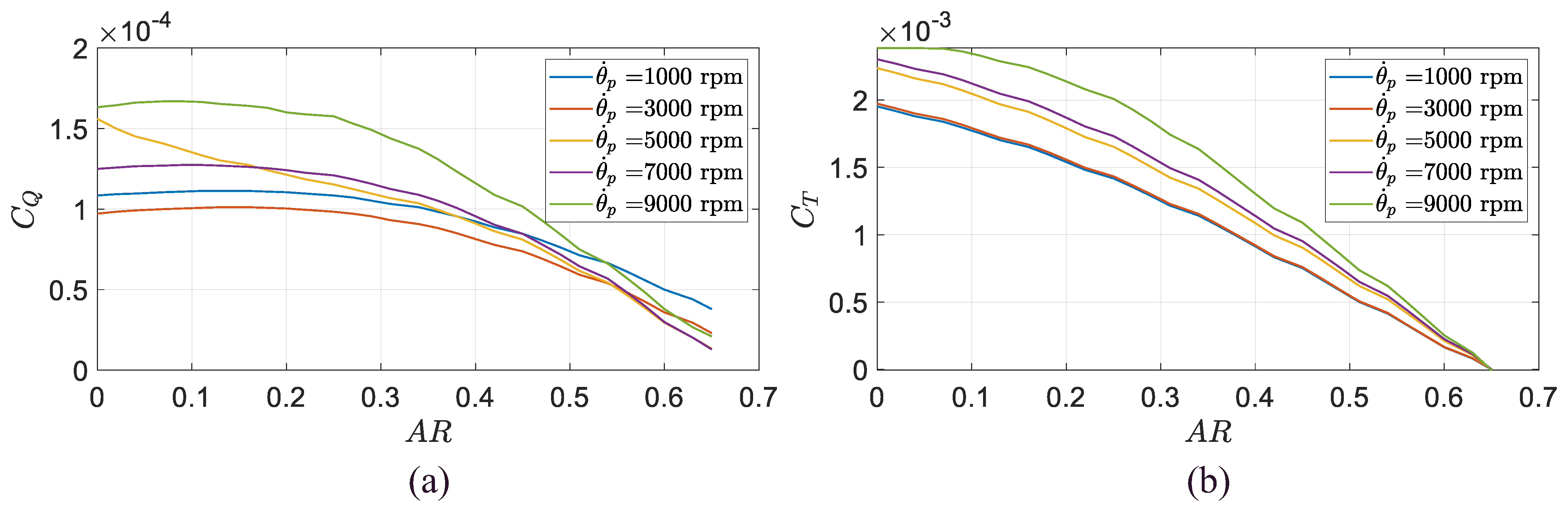
2.4.2. Aero-Mechanical Modelling
3. Results
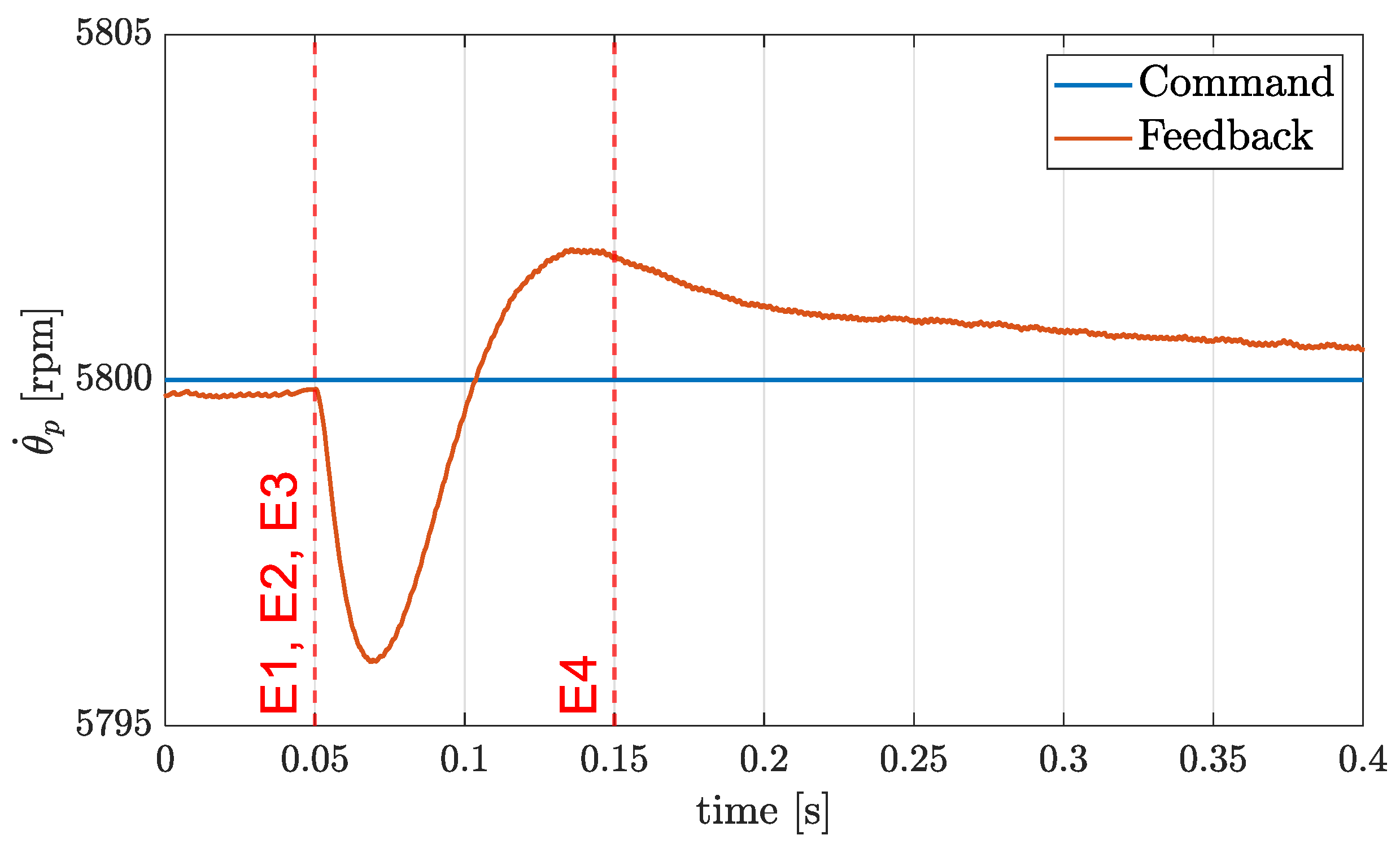
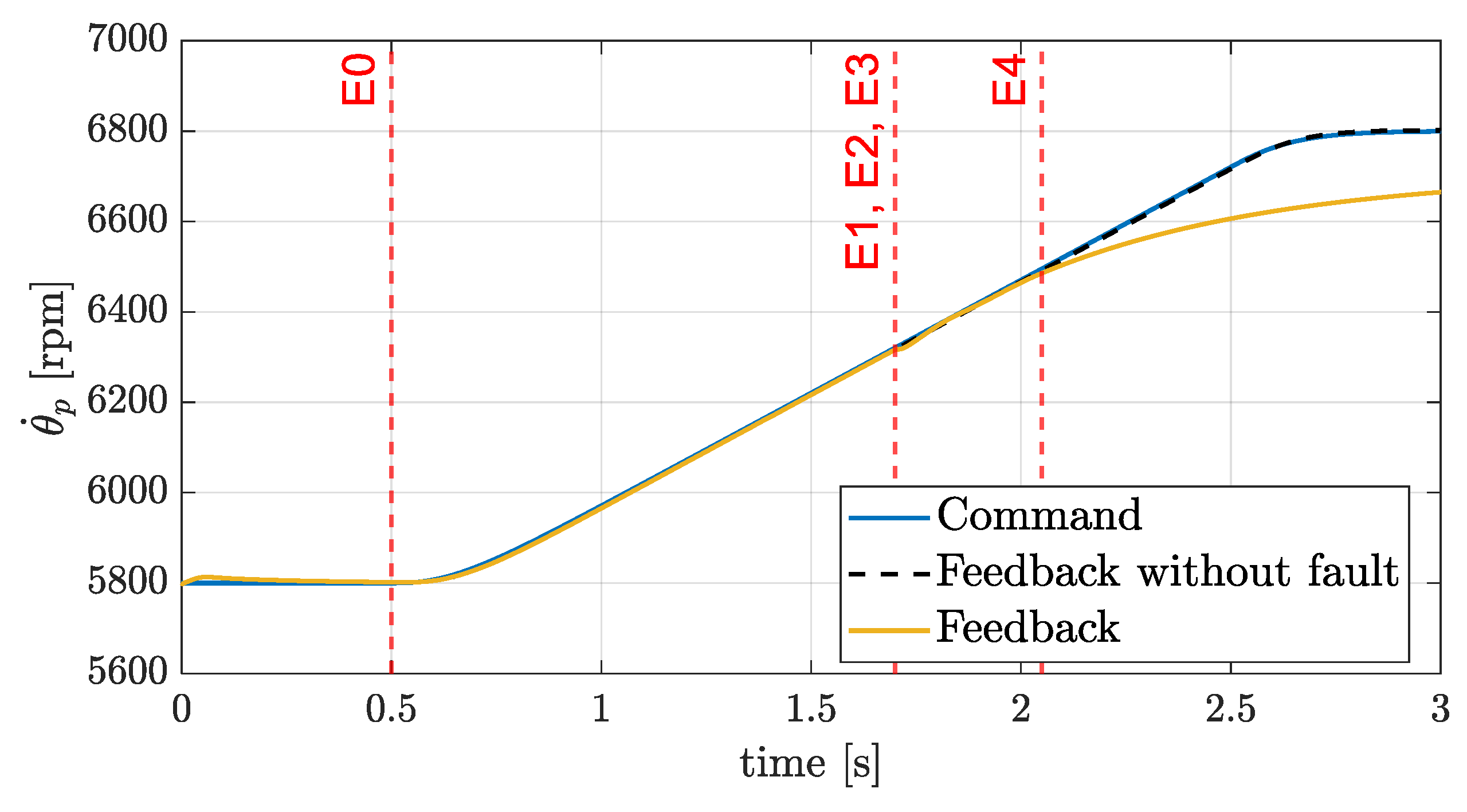
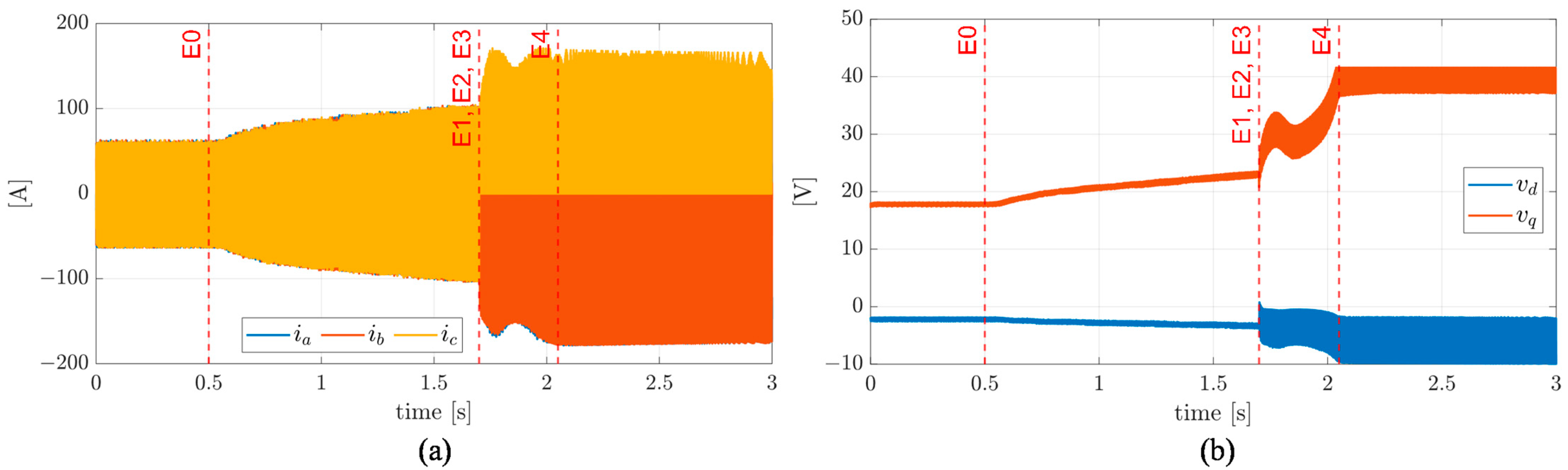
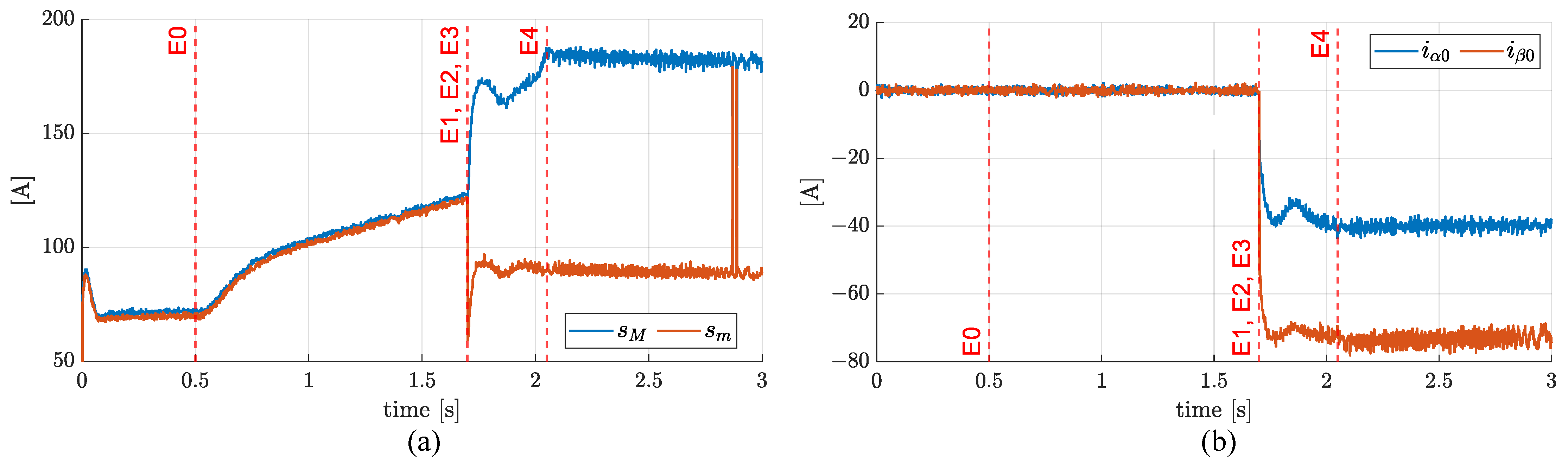
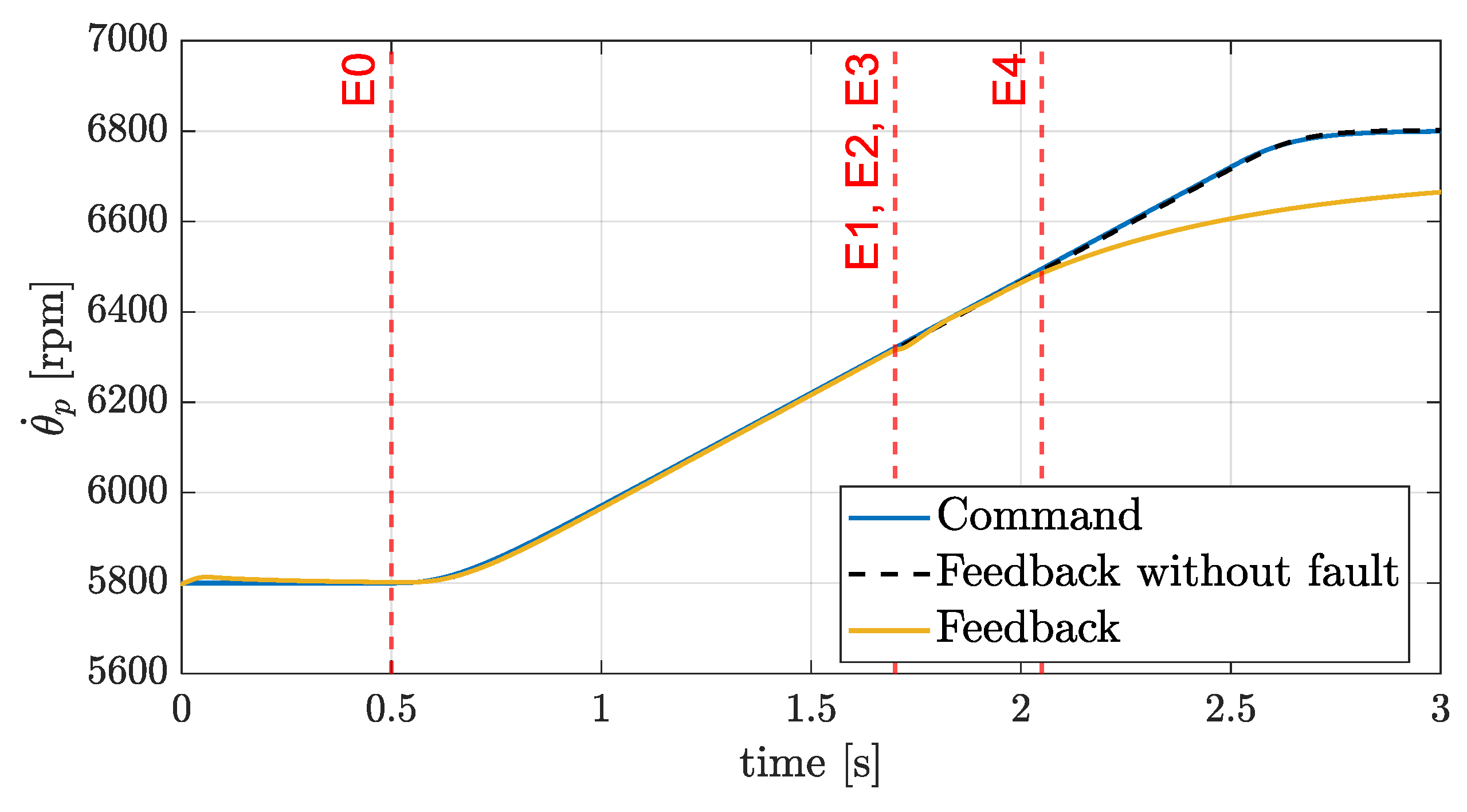
- Starting (t = 0 s) with the PMSM delivering 1.7 Nm torque at 5800 rpm speed, corresponding to the FEPS operation during the UAV cruise;
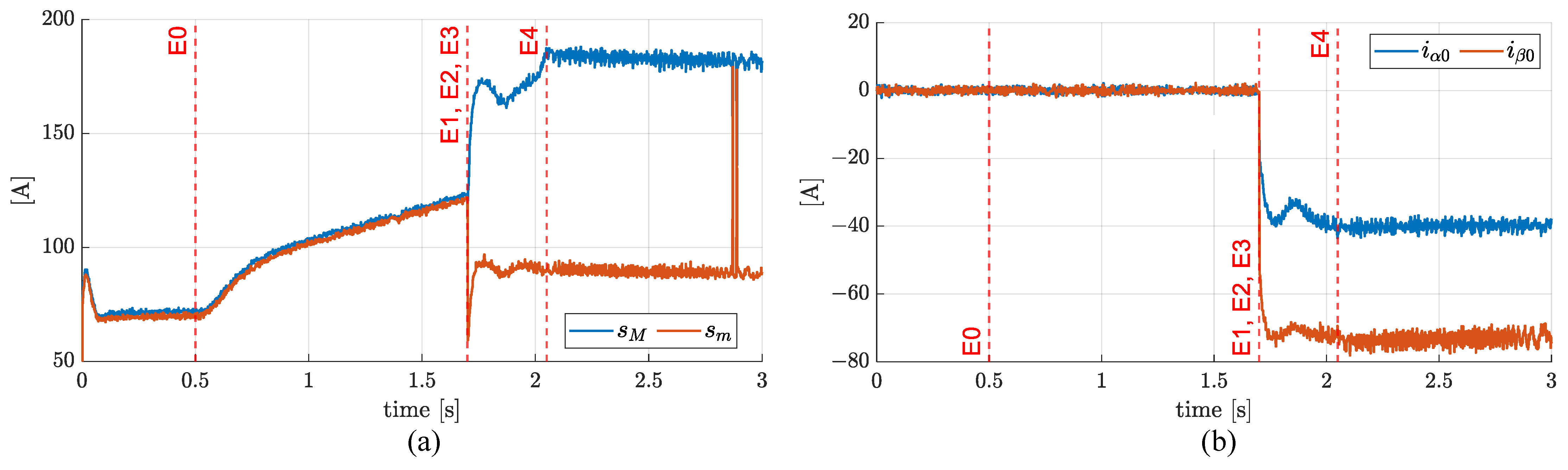
- Commanding, when applicable, a motor speed increase (Event 0, E0) up to 6800 rpm, corresponding to a UAV transition from cruise to climb;
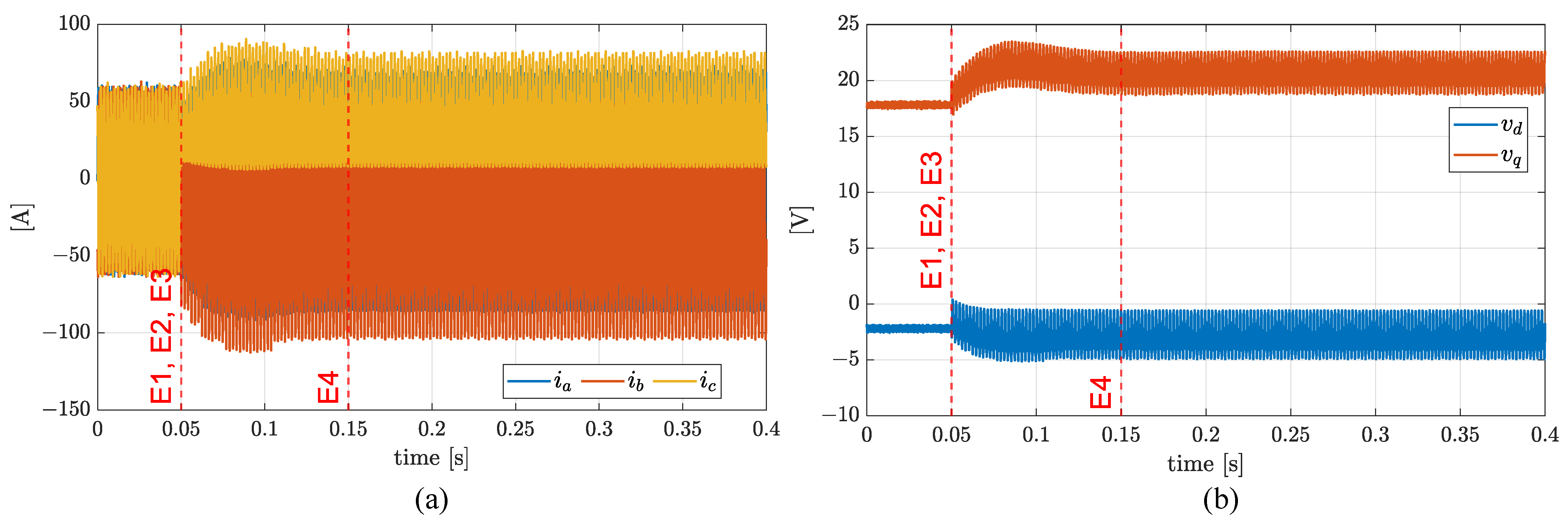
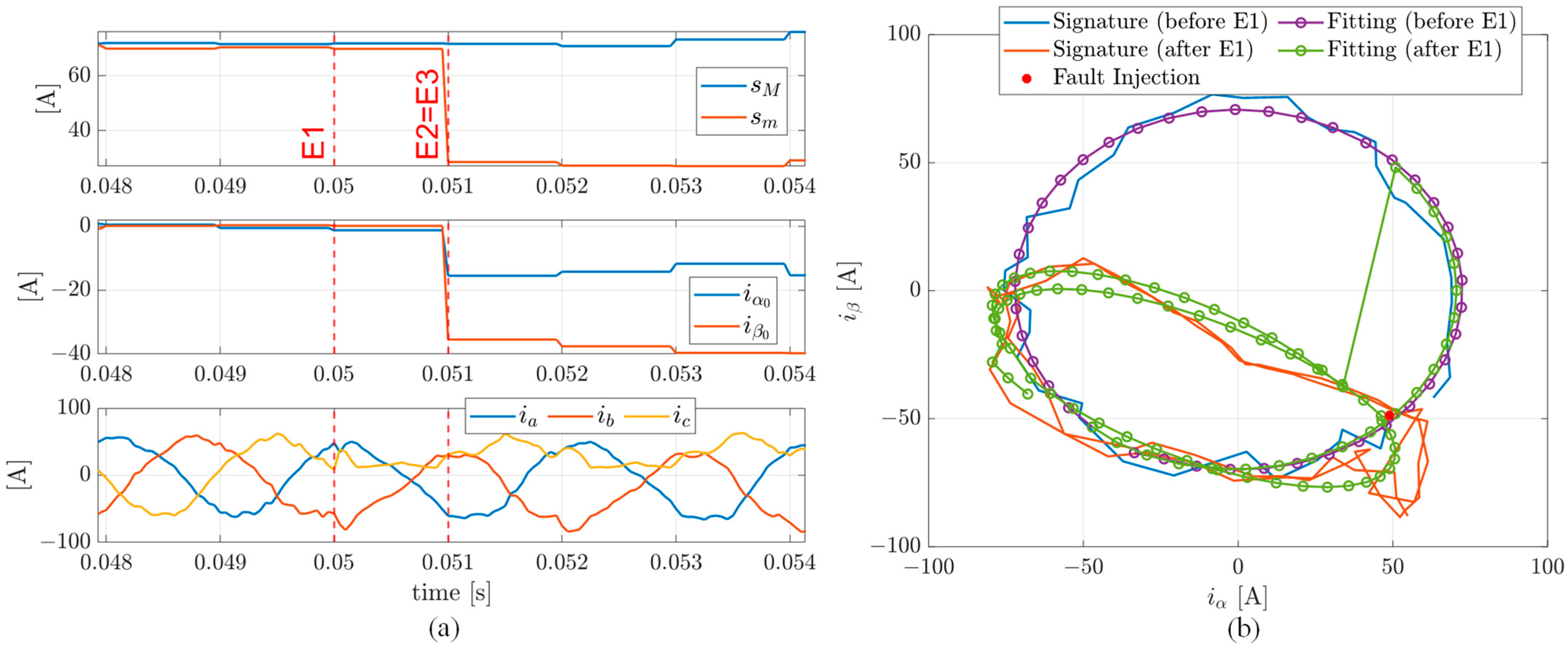
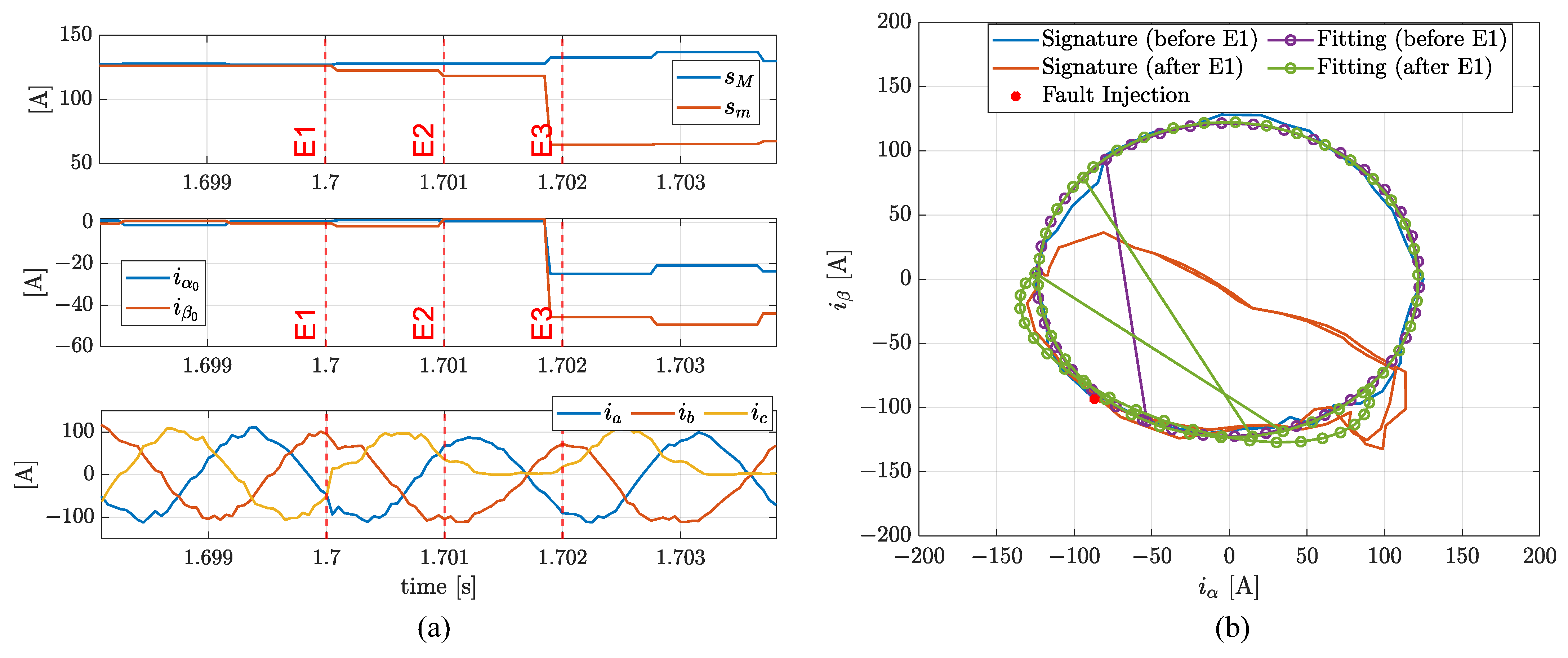
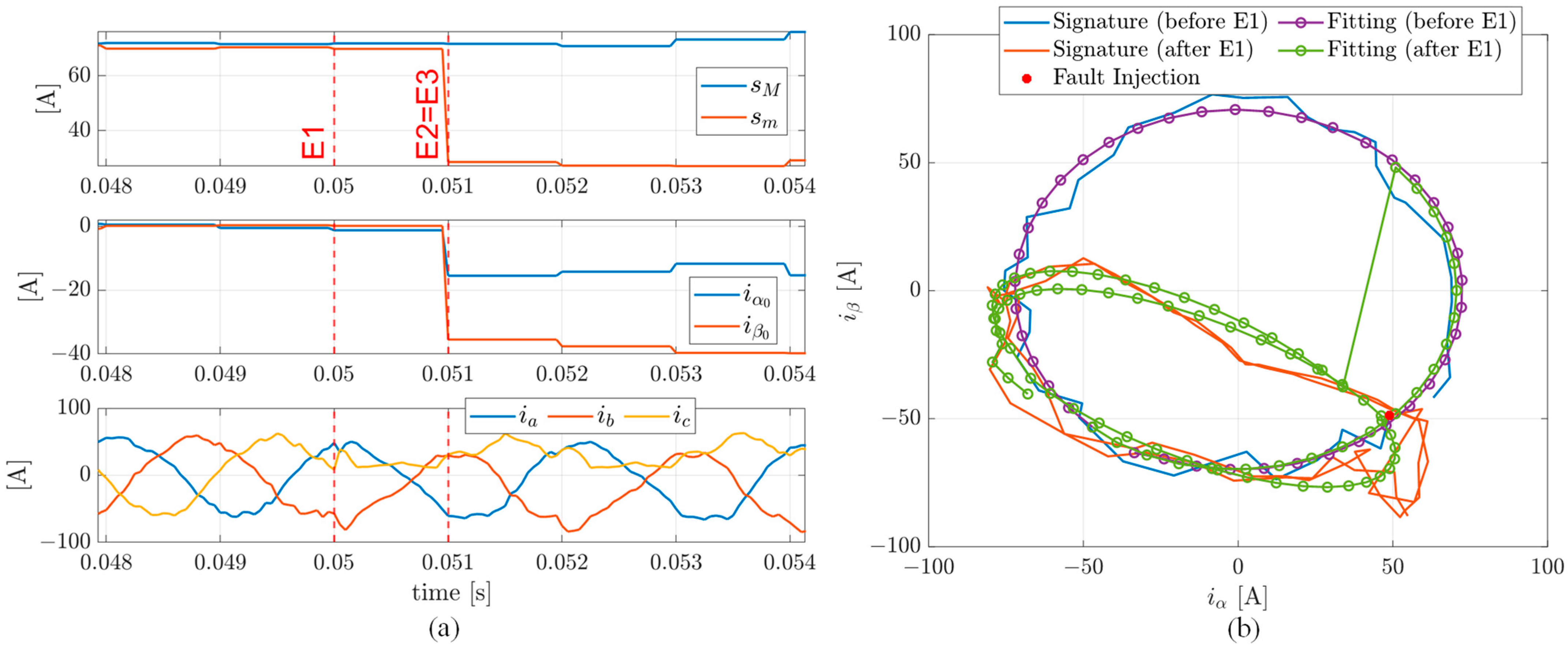
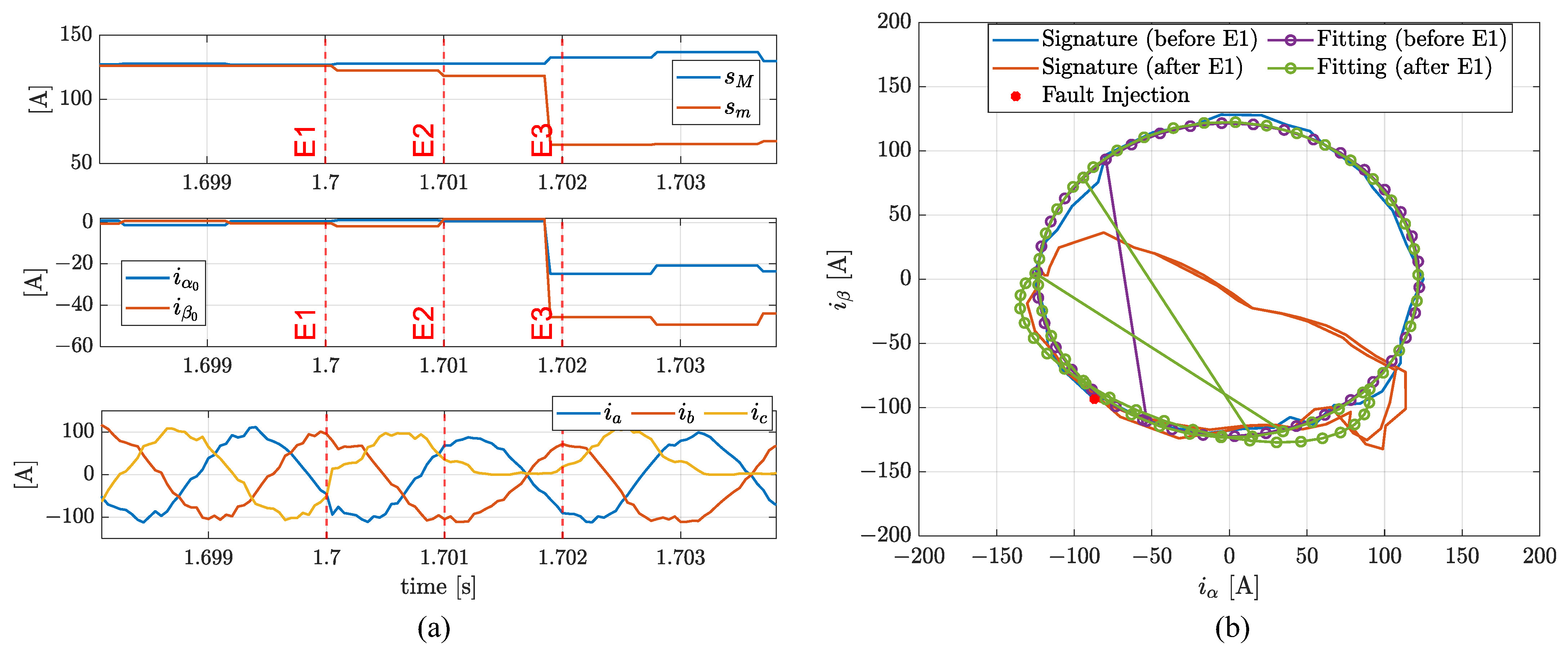
- Injecting an open-circuit fault in the MOSFET CL (Event 1, E1);
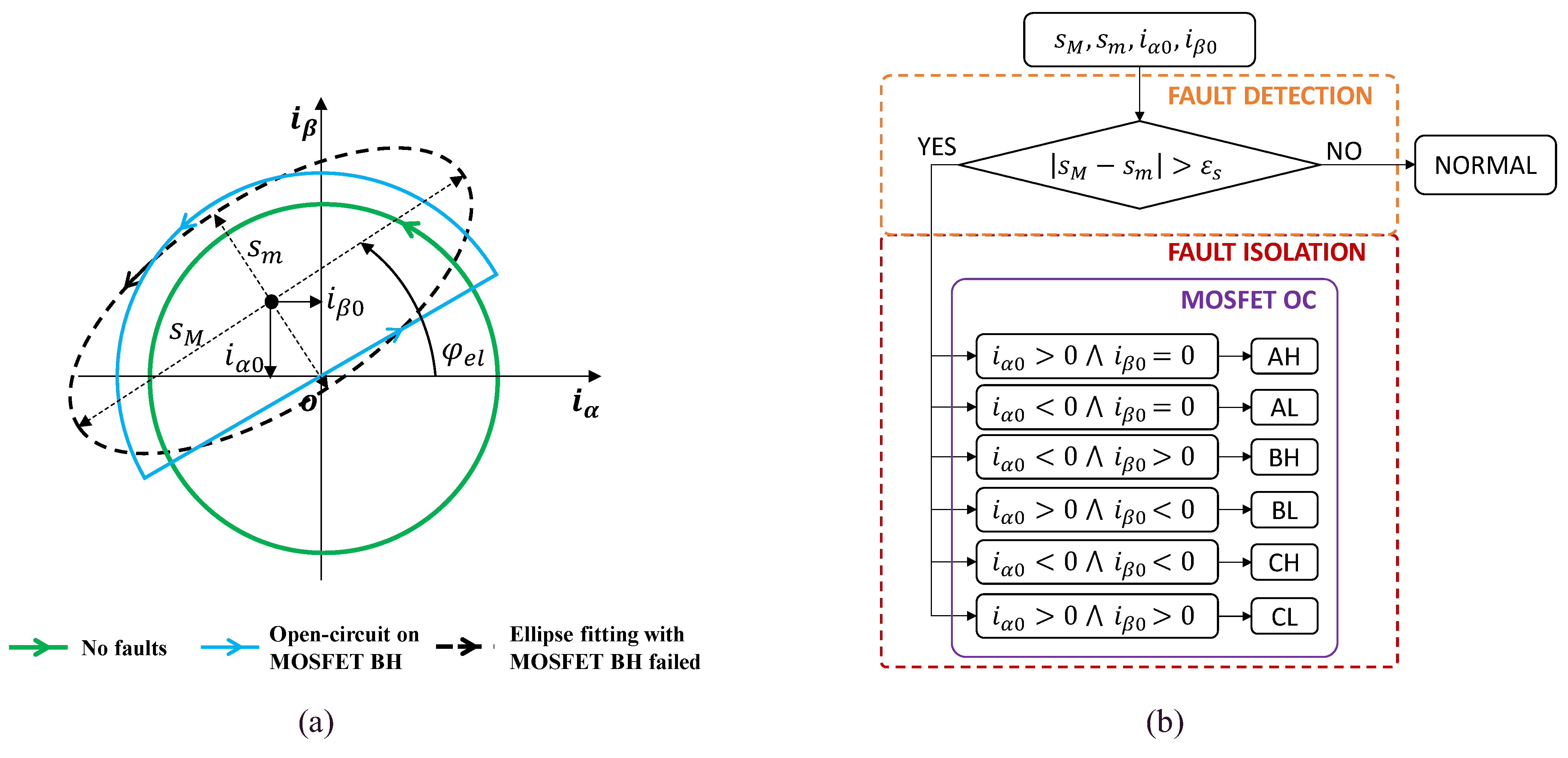
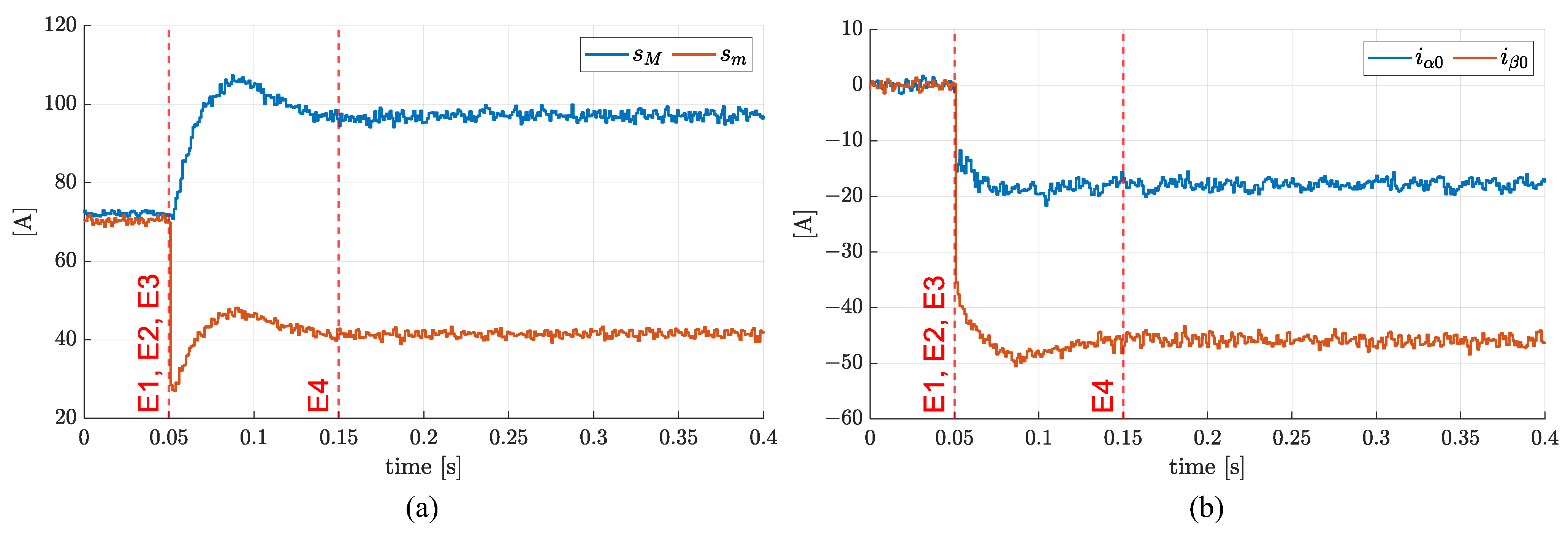
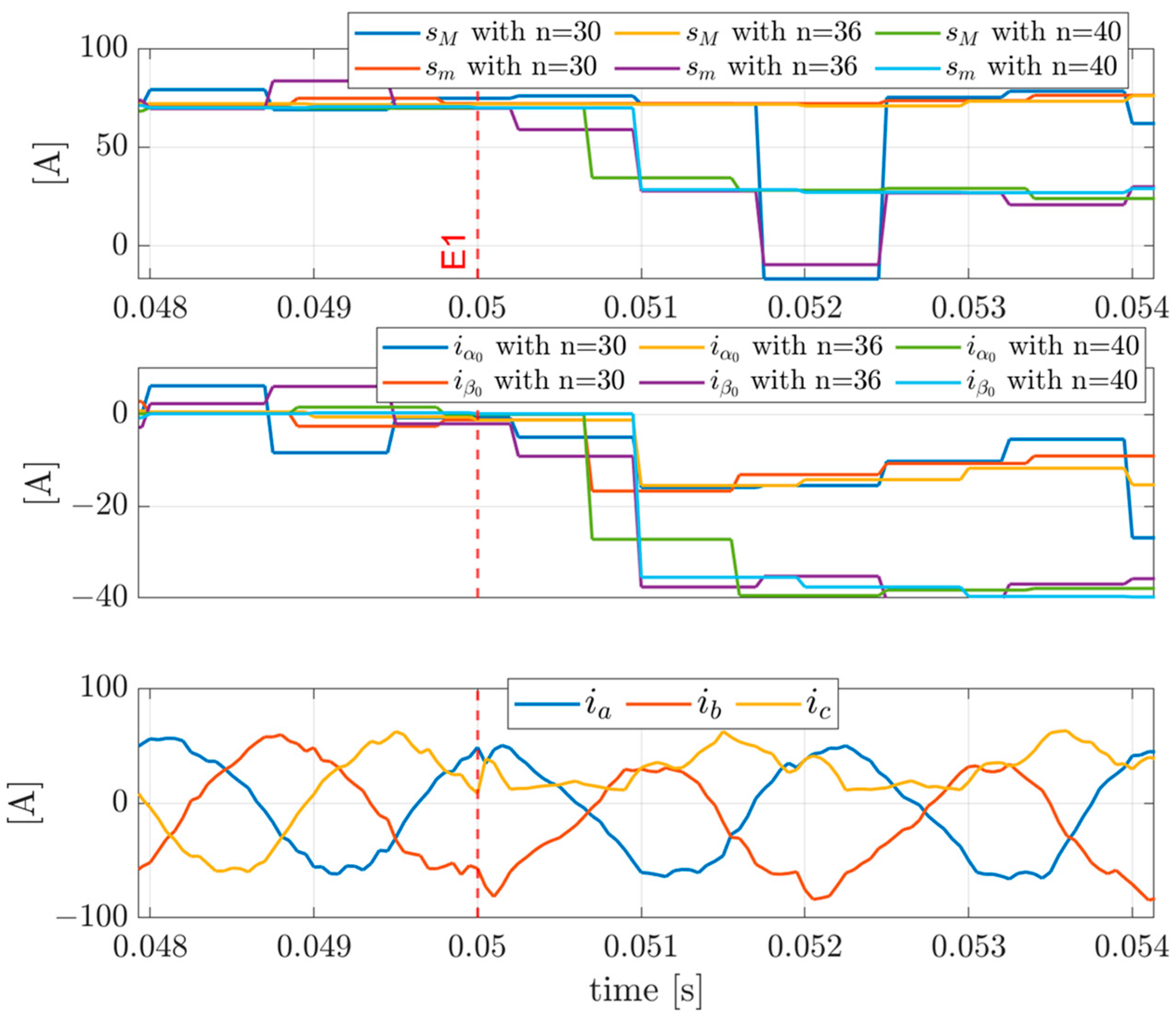
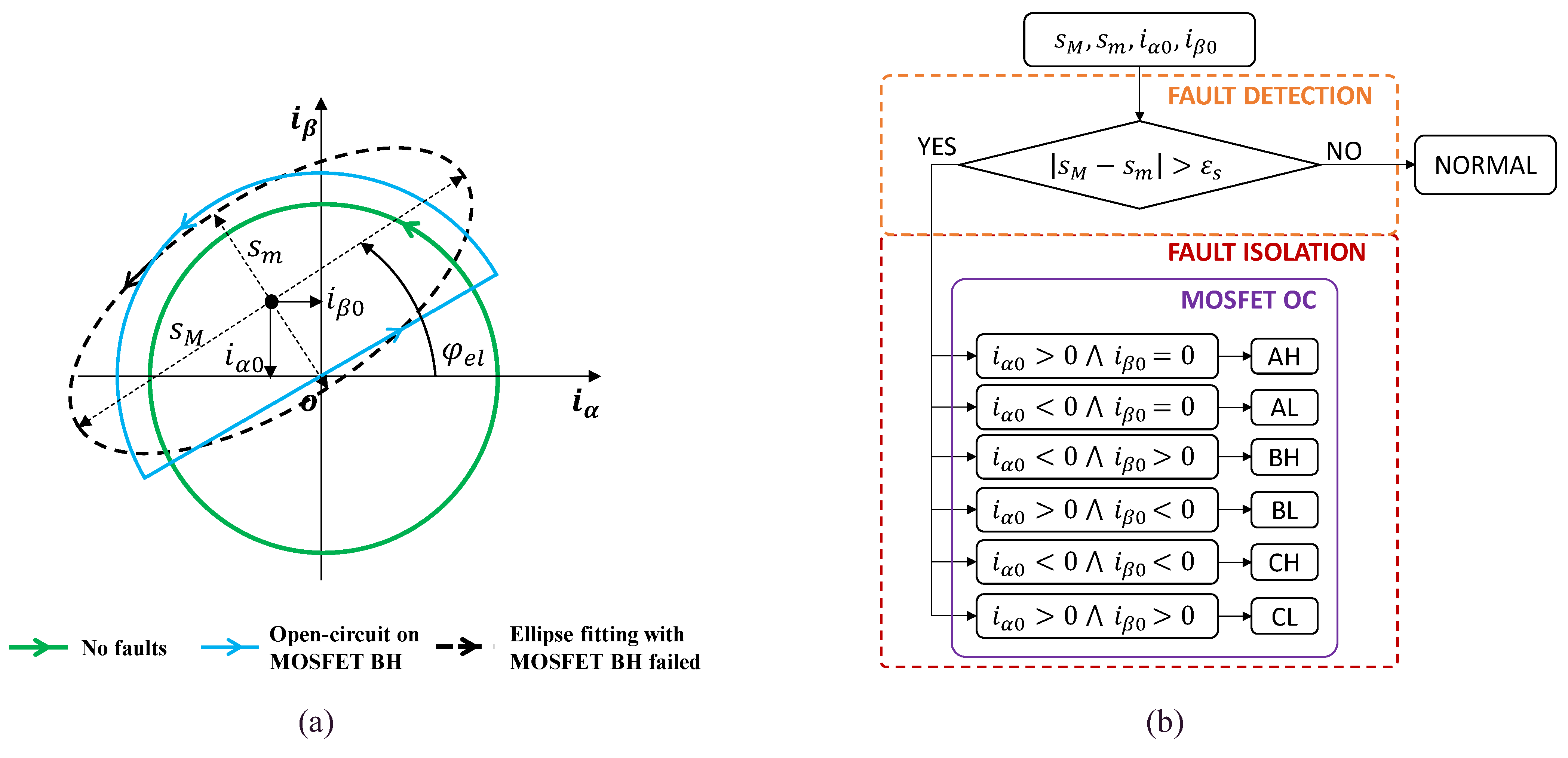
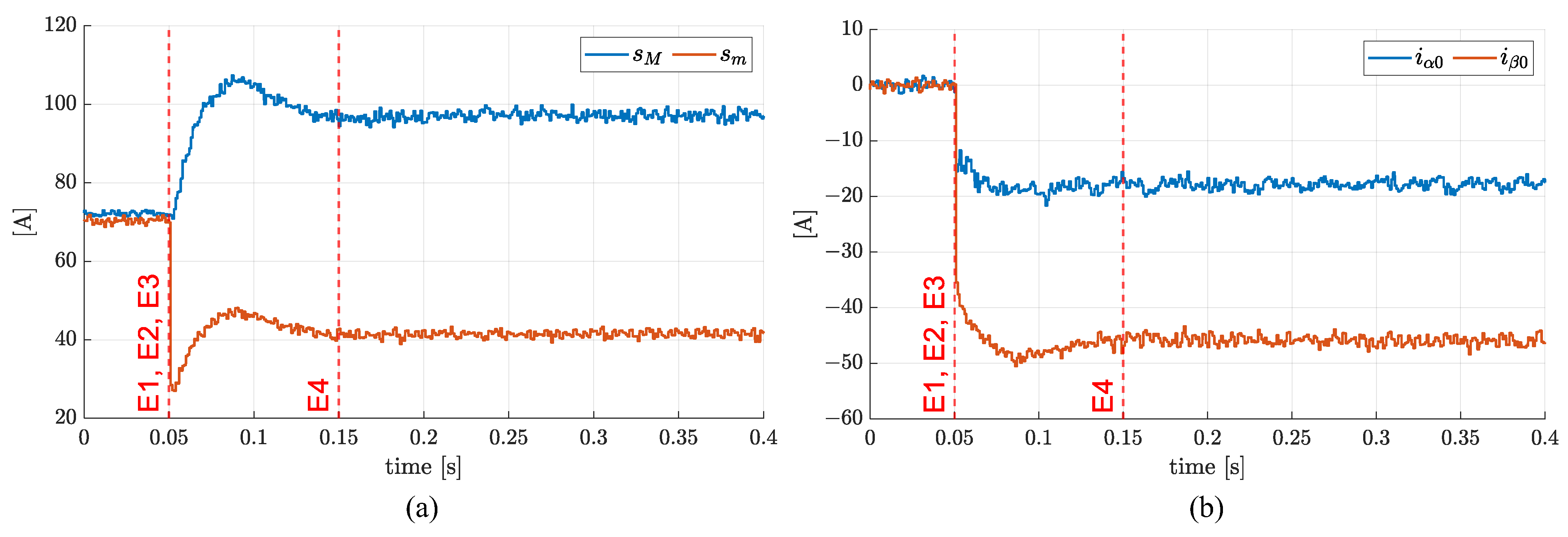
- Detecting an open-circuit fault (Event 2, E2), when the difference between the lengths of major and minor axes of the reconstructed ellipse is greater than 10% of their mean value ( in Figure 3b);
- Isolating the open-circuit fault (Event 3, E3), when the coordinates of the reconstructed ellipse centre satisfy one of the conditions defined in the FDI logic flow chart in Figure 3b.
3.1. Simulation in Cruise Conditions
3.2. Simulation of Transition between Cruise and Climb
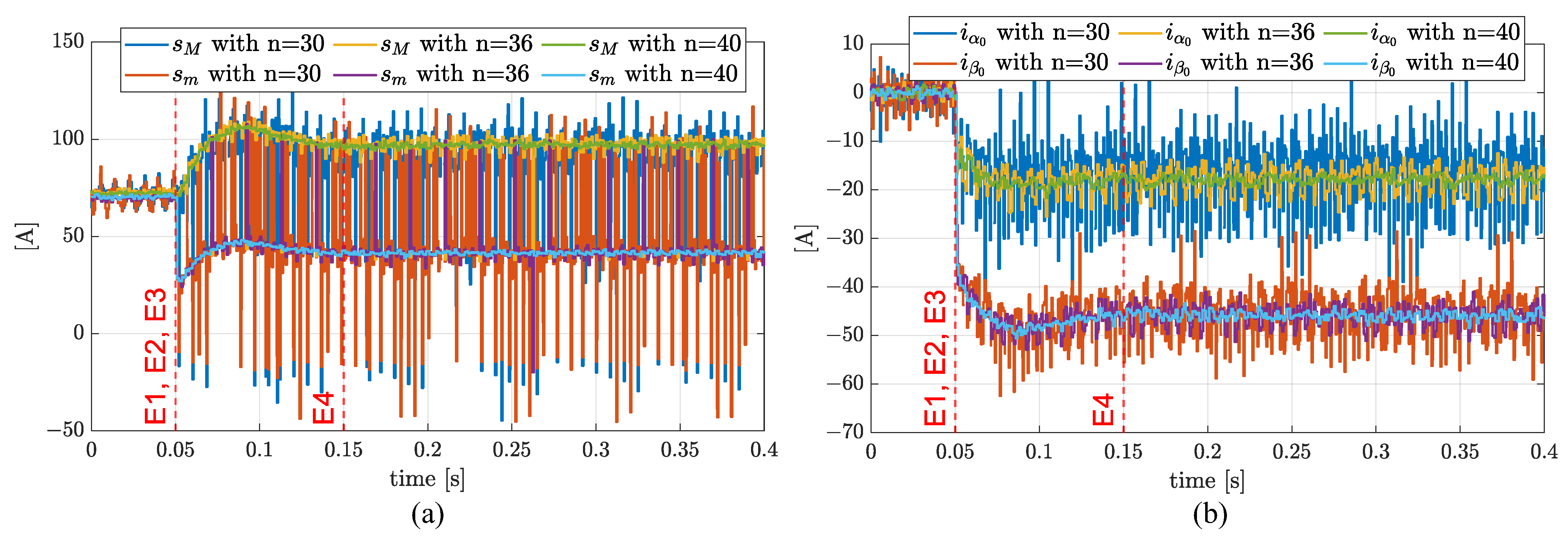
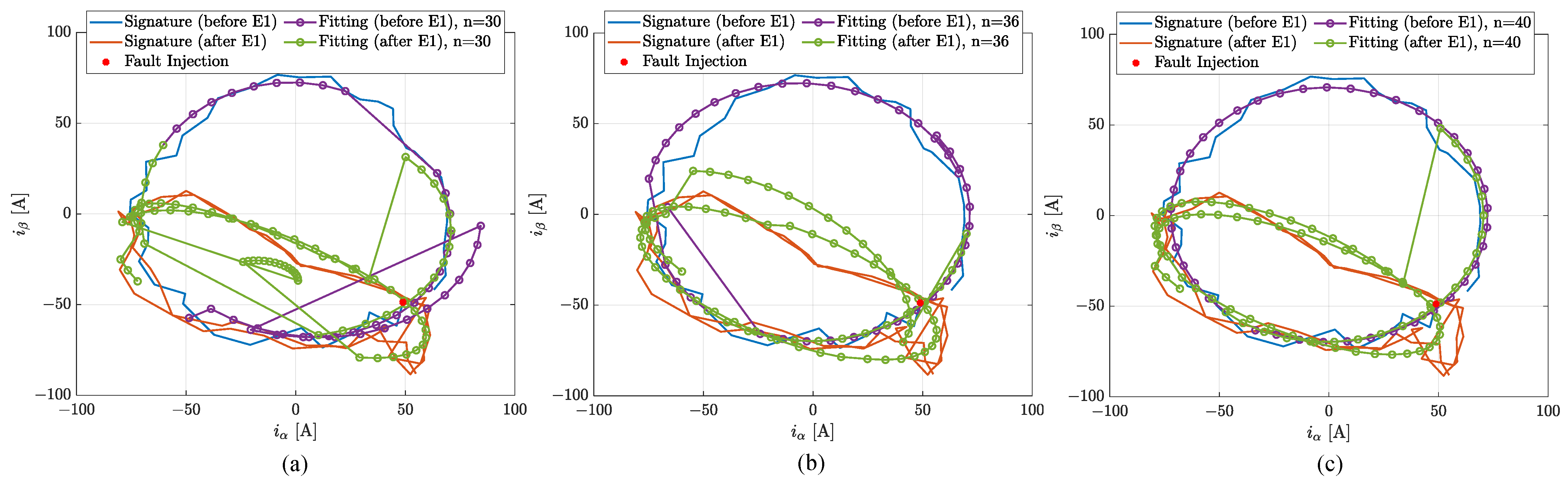
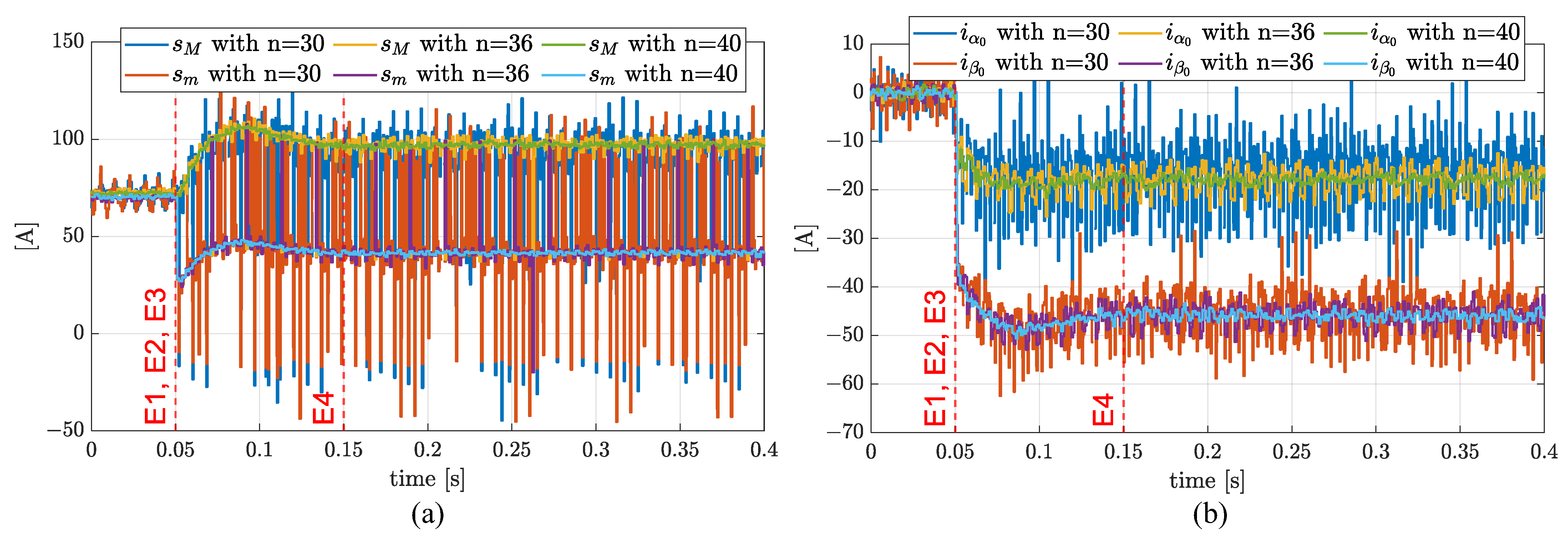
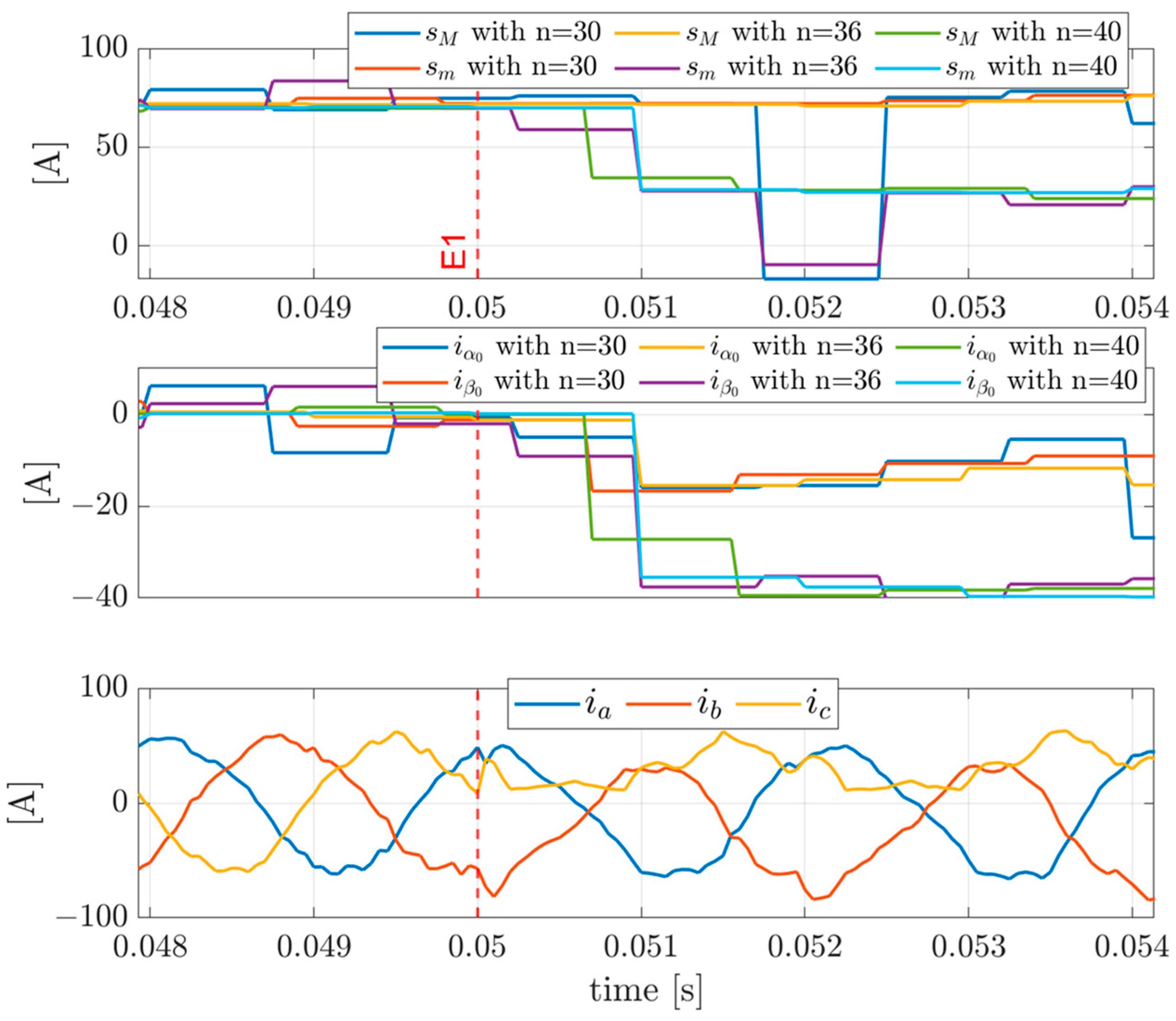
3.3. Impact of Number of Samples on the Algorithm Performances
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | Symbol | Value | Unit |
|---|---|---|---|
| Stator phase resistance | 0.025 | Ω | |
| Stator phase inductance | 2 × 10−5 | H | |
| Pole pairs number | 5 | - | |
| Motor speed constant | 0.0152 | V/(rad/s) | |
| Voltage supply | 48 | V | |
| Rotor inertia | 2.2 × 10−2 | kg·m2 | |
| Propeller diameter | 0.5588 | m | |
| Propeller inertia | 1.186 × 10−3 | kg·m2 | |
| Coupling joint stiffness | 1.598 × 103 | Nm/rad | |
| Coupling joint damping | 0.2545 | Nm/(rad/s) | |
| Rated power | 3200 | W | |
| Sampling frequency | 20 | kHz |
References
- Chan, C.C. The State of the Art of Electric and Hybrid Vehicles. Proc. IEEE 2002, 90, 247–275. [Google Scholar] [CrossRef]
- Zhang, B.; Song, Z.; Zhao, F.; Liu, C. Overview of Propulsion Systems for Unmanned Aerial Vehicles. Energies 2022, 15, 455. [Google Scholar] [CrossRef]
- Suti, A.; Di Rito, G.; Galatolo, R. Climbing Performance Enhancement of Small Fixed-Wing UAVs via Hybrid Electric Propulsion. In Proceedings of the 2021 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Modena, Italy, 8–9 April 2021; pp. 305–310. [Google Scholar]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition Monitoring and Fault Diagnosis of Electrical Motors—A Review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Suti, A.; Di Rito, G.; Galatolo, R. Fault-Tolerant Control of a Three-Phase Permanent Magnet Synchronous Motor for Lightweight UAV Propellers via Central Point Drive. Actuators 2021, 10, 253. [Google Scholar] [CrossRef]
- STANAG 4671—Standardization Agreement—Unmanned Aerial Vehicles Systems Airworthiness Requirements (USAR); NATO Standardization Agency: Brussels, Belgium, 2009.
- Zhang, Y.; Liu, G.; Zhao, W.; Zhou, H.; Chen, Q.; Wei, M. Online Diagnosis of Slight Interturn Short-Circuit Fault for a Low-Speed Permanent Magnet Synchronous Motor. IEEE Trans. Transp. Electrif. 2021, 7, 104–113. [Google Scholar] [CrossRef]
- Ramoul, J.; Watthewaduge, G.; Callegaro, A.D.; Nahid-Mobarakeh, B.; Baronian, A.; Emadi, A. Analysis of Open Phase and Phase-to-Phase Short Circuit Fault of PMSM for Electrical Propulsion in an EVTOL. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–6. [Google Scholar]
- Suti, A.; Di Rito, G.; Galatolo, R. Fault-Tolerant Control of a Dual-Stator PMSM for the Full-Electric Propulsion of a Lightweight Fixed-Wing UAV. Aerospace 2022, 9, 337. [Google Scholar] [CrossRef]
- Kontarcek, A.; Bajec, P.; Nemec, M.; Ambrozic, V.; Nedeljkovic, D. Cost-Effective Three-Phase PMSM Drive Tolerant to Open-Phase Fault. IEEE Trans. Ind. Electron. 2015, 62, 6708–6718. [Google Scholar] [CrossRef]
- Wenping, C.; Mecrow, B.C.; Atkinson, G.J.; Bennett, J.W.; Atkinson, D.J. Overview of Electric Motor Technologies Used for More Electric Aircraft (MEA). IEEE Trans. Ind. Electron. 2012, 59, 3523–3531. [Google Scholar] [CrossRef]
- Lee, K.-B.; Choi, U.-M. Faults and Diagnosis Systems in Power Converters. In Advanced and Intelligent Control in Power Electronics and Drives; Springer: Cham, Switzerland, 2014; pp. 143–178. [Google Scholar]
- Orlowska-Kowalska, T.; Wolkiewicz, M.; Pietrzak, P.; Skowron, M.; Ewert, P.; Tarchala, G.; Krzysztofiak, M.; Kowalski, C.T. Fault Diagnosis and Fault-Tolerant Control of PMSM Drives–State of the Art and Future Challenges. IEEE Access 2022, 10, 59979–60024. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, Z.; Jiang, W. Fault-Tolerant Control of Open-Circuit Fault for Permanent Magnet Starter/Generator. In Proceedings of the 2018 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Republic of Korea, 7–10 October 2018; pp. 5–10. [Google Scholar]
- Suti, A.; Di Rito, G.; Mattei, G. Condition Monitoring of the Torque Imbalance in a Dual-Stator Permanent Magnet Synchronous Motor for the Propulsion of a Lightweight Fixed-Wing UAV. Drones 2023, 7, 618. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Di Rito, G.; Previdi, F. Electro-Mechanical Actuators for the More Electric Aircraft; Springer: Cham, Switzerland, 2021; ISBN 978-3-030-61798-1. [Google Scholar]
- Beltrao de Rossiter Correa, M.; Brandao Jacobina, C.; Cabral da Silva, E.R.; Nogueira Lima, A.M. An Induction Motor Drive System with Improved Fault Tolerance. IEEE Trans. Ind. Appl. 2001, 37, 873–879. [Google Scholar] [CrossRef]
- Ribeiro, R.L.A.; Jacobina, C.B.; Lima, A.M.N.; da Silva, E.R.C. A Strategy for Improving Reliability of Motor Drive Systems Using a Four-Leg Three-Phase Converter. In Proceedings of the APEC 2001. Sixteenth Annual IEEE Applied Power Electronics Conference and Exposition (Cat. No.01CH37181), Anaheim, CA, USA, 4–8 March 2001; pp. 385–391. [Google Scholar]
- Li, W.; Tang, H.; Luo, S.; Yan, X.; Wu, Z. Comparative Analysis of the Operating Performance, Magnetic Field, and Temperature Rise of the Three-phase Permanent Magnet Synchronous Motor with or without Fault-tolerant Control under Single-phase Open-circuit Fault. IET Electr. Power Appl. 2021, 15, 861–872. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, K.; Al-Durra, A.; Muyeen, S.M.; Zhou, D. A State-of-the-Art Review on Wind Power Converter Fault Diagnosis. Energy Rep. 2022, 8, 5341–5369. [Google Scholar] [CrossRef]
- Naseri, F.; Schaltz, E.; Lu, K.; Farjah, E. Real-time Open-switch Fault Diagnosis in Automotive Permanent Magnet Synchronous Motor Drives Based on Kalman Filter. IET Power Electron. 2020, 13, 2450–2460. [Google Scholar] [CrossRef]
- Salehifar, M.; Salehi Arashloo, R.; Moreno-Eguilaz, M.; Sala, V.; Romeral, L. Observer-based Open Transistor Fault Diagnosis and Fault-tolerant Control of Five-phase Permanent Magnet Motor Drive for Application in Electric Vehicles. IET Power Electron. 2015, 8, 76–87. [Google Scholar] [CrossRef]
- Zhou, X.; Sun, J.; Cui, P.; Lu, Y.; Lu, M.; Yu, Y. A Fast and Robust Open-Switch Fault Diagnosis Method for Variable-Speed PMSM System. IEEE Trans. Power Electron. 2021, 36, 2598–2610. [Google Scholar] [CrossRef]
- Kiselev, A.; Catuogno, G.R.; Kuznietsov, A.; Leidhold, R. Finite-Control-Set MPC for Open-Phase Fault-Tolerant Control of PM Synchronous Motor Drives. IEEE Trans. Ind. Electron. 2020, 67, 4444–4452. [Google Scholar] [CrossRef]
- Huang, W.; Du, J.; Hua, W.; Lu, W.; Bi, K.; Zhu, Y.; Fan, Q. Current-Based Open-Circuit Fault Diagnosis for PMSM Drives With Model Predictive Control. IEEE Trans. Power Electron. 2021, 36, 10695–10704. [Google Scholar] [CrossRef]
- Huang, W.; Du, J.; Hua, W.; Fan, Q. An Open-Circuit Fault Diagnosis Method for PMSM Drives Using Symmetrical and DC Components. Chin. J. Electr. Eng. 2021, 7, 124–135. [Google Scholar] [CrossRef]
- Estima, J.O.; Marques Cardoso, A.J. A New Algorithm for Real-Time Multiple Open-Circuit Fault Diagnosis in Voltage-Fed PWM Motor Drives by the Reference Current Errors. IEEE Trans. Ind. Electron. 2013, 60, 3496–3505. [Google Scholar] [CrossRef]
- Gmati, B.; Jlassi, I.; Khojet El Khil, S.; Marques Cardoso, A.J. Open-switch Fault Diagnosis in Voltage Source Inverters of PMSM Drives Using Predictive Current Errors and Fuzzy Logic Approach. IET Power Electron. 2021, 14, 1059–1072. [Google Scholar] [CrossRef]
- Li, P.; Xu, X.; Yang, S.; Jiang, X. Open Circuit Fault Diagnosis Strategy of PMSM Drive System Based on Grey Prediction Theory for Industrial Robot. Energy Rep. 2023, 9, 313–320. [Google Scholar] [CrossRef]
- Zhang, Y. Current Behavior-Based Open-Switch Fault on-Line Diagnosis of Inverters in PMSM Drive Systems. Measurement 2022, 202, 111810. [Google Scholar] [CrossRef]
- Manikandan, R.; Singh, R.R. Open Switch Fault Diagnosis of VSI-Fed PMSM Drive Using MPC Cost Function and Burg Algorithm. In Proceedings of the 2022 IEEE 1st Industrial Electronics Society Annual On-Line Conference (ONCON), Kharagpur, India, 9–11 December 2022; pp. 1–6. [Google Scholar]
- Im, W.-S.; Kim, J.-S.; Kim, J.-M.; Lee, D.-C.; Lee, K.-B. Diagnosis Methods for IGBT Open Switch Fault Applied to 3-Phase AC/DC PWM Converter. J. Power Electron. 2012, 12, 120–127. [Google Scholar] [CrossRef]
- Peuget, R.; Courtine, S.; Rognon, J.-P. Fault Detection and Isolation on a PWM Inverter by Knowledge-Based Model. IEEE Trans. Ind. Appl. 1998, 34, 1318–1326. [Google Scholar] [CrossRef]
- Kral, C.; Kafka, K. Power Electronics Monitoring for a Controlled Voltage Source Inverter Drive with Induction Machines. In Proceedings of the 2000 IEEE 31st Annual Power Electronics Specialists Conference. Conference Proceedings (Cat. No.00CH37018), Galway, Ireland, 23 June 2000; pp. 213–217. [Google Scholar]
- Wu, X.; Tian, R.; Cheng, S.; Chen, T.; Tong, L. A Nonintrusive Diagnostic Method for Open-Circuit Faults of Locomotive Inverters Based on Output Current Trajectory. IEEE Trans. Power Electron. 2018, 33, 4328–4341. [Google Scholar] [CrossRef]
- Trabelsi, M.; Boussak, M.; Gossa, M. Multiple IGBTs Open Circuit Faults Diagnosis in Voltage Source Inverter Fed Induction Motor Using Modified Slope Method. In Proceedings of the The XIX International Conference on Electrical Machines—ICEM 2010, Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar]
- Sun, X.; Diao, N.; Song, C.; Qiu, Y.; Zhao, X. An Open-Circuit Fault Diagnosis Method Based on Adjacent Trend Line Relationship of Current Vector Trajectory for Motor Drive Inverter. Machines 2023, 11, 928. [Google Scholar] [CrossRef]
- Sobanski, P.; Orlowska-Kowalska, T. Open Switch Fault Diagnosis Methods for an AC/DC Line-Side Converter. In Proceedings of the 2017 IEEE International Conference on Industrial Technology (ICIT), Toronto, ON, Canada, 22–25 March 2017; pp. 1580–1585. [Google Scholar]
- Freire, N.M.A.; Estima, J.O.; Cardoso, A.J.M. A Voltage-Based Approach Without Extra Hardware for Open-Circuit Fault Diagnosis in Closed-Loop PWM AC Regenerative Drives. IEEE Trans. Ind. Electron. 2014, 61, 4960–4970. [Google Scholar] [CrossRef]
- Choi, C.; Lee, W. Design and Evaluation of Voltage Measurement-Based Sectoral Diagnosis Method for Inverter Open Switch Faults of Permanent Magnet Synchronous Motor Drives. IET Electr. Power Appl. 2012, 6, 526. [Google Scholar] [CrossRef]
- Wang, B.; Feng, X.; Wang, R. Open-Circuit Fault Diagnosis for Permanent Magnet Synchronous Motor Drives Based on Voltage Residual Analysis. Energies 2023, 16, 5722. [Google Scholar] [CrossRef]
- Suti, A.; Di Rito, G.; Galatolo, R. Novel Approach to Fault-Tolerant Control of Inter-Turn Short Circuits in Permanent Magnet Synchronous Motors for UAV Propellers. Aerospace 2022, 9, 401. [Google Scholar] [CrossRef]
- Fitzgibbon, A.W.; Pilu, M.; Fisher, R.B. Direct Least Squares Fitting of Ellipses. In Proceedings of the 13th International Conference on Pattern Recognition, Vienna, Austria, 25–29 August 1996; pp. 253–257. [Google Scholar]
- Halir, R.; Flusser, J. Numerically stable direct least squares fitting of ellipses. In Proceedings of the 6th International Conference in Central Europe on Computer Graphics and Visualization, Plzen-Bory, Czech Republic, 9–13 February 1998. [Google Scholar]
- Weisstein, E.W. “Ellipse”, MathWorld—A Wolfram Web Resource. Available online: https://mathworld.wolfram.com/Ellipse.html (accessed on 15 November 2023).
- APC Propellers TECHNICAL INFO. Available online: https://www.apcprop.com/technical-information/performance-data/ (accessed on 10 May 2023).







| Method | Approach | Advantages | Drawbacks |
|---|---|---|---|
| Model-based | Accurate modelling of system with faults starting from physical first-principles | Detailed information on condition monitoring | Model uncertainties |
| Signal-based | Characterisation of behaviour with faults to identify measurements representing fault symptoms | Detailed modelling is not required | Uncertainties regarding fault symptoms, disturbances in measurements |
| Data-driven | Collection of experimental databases related to behaviour with faults and faults identification via artificial intelligence | No explicit modelling is required | Dependence on training database, testing costs |
| Failed MOSFET (Fault Effect) | Trajectory Equation with Respect to Command |
|---|---|
| AH () or AL () | |
| BH () or BL () | |
| CH () or CL () |
| Method | Isolation Time [×Electric Cycle] | Sampling to Electric Frequency | Robustness | Sensitivity to Parameters | Sensitivity to Work Conditions | Computational Effort | Simplicity |
|---|---|---|---|---|---|---|---|
| Model predictive control [31] | >1 | 20000/80 = 250 | Medium | High | Medium | Medium | Medium |
| Average value [32] | >0.5 | Not available | High | Medium | Medium | Medium | Medium |
| Two-phase current trajectory [35] | >1 | 3000/50 = 60 | Low | Medium | Low | Medium | Medium |
| Current phasor trajectory slope [36] | >1 | 1000/50 = 20 | Medium | Medium | Medium | Medium | High |
| Adjacent slope [37] | <0.4 | 500/50 = 10 | Medium | Low | Medium | Low | High |
| Current phasor trajectory fitting (this work) | <0.5 | 20000/600 = 33 | High | Low | Medium | Low | High |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suti, A.; Di Rito, G. Diagnosis of Power Switch Faults in Three-Phase Permanent Magnet Synchronous Motors via Current-Signature Technique. Actuators 2024, 13, 25. https://doi.org/10.3390/act13010025
Suti A, Di Rito G. Diagnosis of Power Switch Faults in Three-Phase Permanent Magnet Synchronous Motors via Current-Signature Technique. Actuators. 2024; 13(1):25. https://doi.org/10.3390/act13010025
Chicago/Turabian StyleSuti, Aleksander, and Gianpietro Di Rito. 2024. "Diagnosis of Power Switch Faults in Three-Phase Permanent Magnet Synchronous Motors via Current-Signature Technique" Actuators 13, no. 1: 25. https://doi.org/10.3390/act13010025
APA StyleSuti, A., & Di Rito, G. (2024). Diagnosis of Power Switch Faults in Three-Phase Permanent Magnet Synchronous Motors via Current-Signature Technique. Actuators, 13(1), 25. https://doi.org/10.3390/act13010025