

Dynamic Path Planning for Mobile Robots by Integrating Improved Sparrow Search Algorithm and Dynamic Window Approach
Abstract
1. Introduction
2. Global Path Planning
2.1. Basic SSA
2.2. MISSA: Sparrow Search Algorithm Improved through Integration of Multiple Strategies
- (1)
- To address the imbalanced distribution of the population and the inadequate diversity in the basic SSA, logistic–tent chaotic mapping is employed to initialize the sparrow population, ensuring an even distribution and improving algorithm traversal. In order to enhance the diversity within the population and improve both the quality of the initial solution and search precision, an elite-inverse learning strategy is implemented.
- (2)
- To tackle the problem of inadequate position updating in the sparrow population, a dynamic self-adaptive adjustment strategy for position updating is employed. This strategy refines the position update equations for both producers and scroungers, bolstering the algorithm’s optimization prowess.
- (3)
- Given that the basic SSA tends to get trapped in local optima, a Lévy flight strategy is utilized to update the position of the scroungers. The incorporation of an optimal position perturbation strategy boosts the algorithm’s capability to evade local optima.
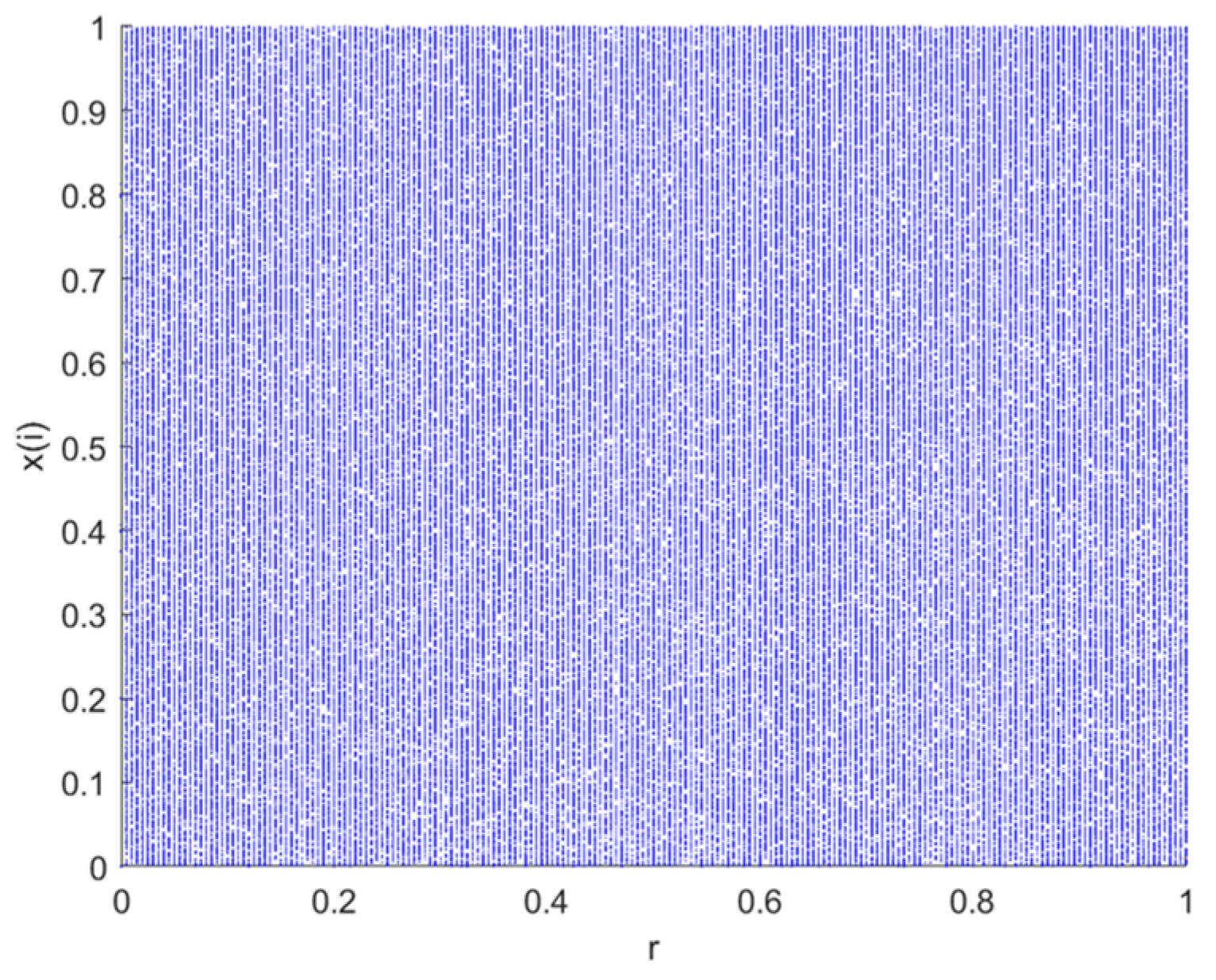
2.2.1. Initialization of Population Using Logistic–Tent Chaotic Mapping
2.2.2. Elite Opposition-Based Learning Strategy
2.2.3. Dynamic Self-Adaptive Position Update Strategy
- (1)
- Improved Formula for Producer Position Update
- (2)
- Improved Formula for Scrounger Position Update
2.2.4. Optimal Position Perturbation Strategy
2.2.5. Improved Algorithm Flow
- Step 1: Initialize parameters. These include population size, maximum number of iterations, proportion of producers, proportion of scouters, warning threshold, and safety threshold.
- Step 2: Initialize the population through the application of logistic–tent chaotic mapping, calculate the fitness value for each sparrow, sort them, and identify the current best and worst fitness values along with their corresponding sparrow positions.
- Step 3: Apply the EOBL strategy proportionate to the number of producers, combined with fitness value sorting, to select top-ranked sparrows as producers and update their positions according to Equations (13) and (14).
- Step 4: The remaining sparrows function as producers and update their positions using Equation (17).
- Step 5: Based on the proportion of scouters, randomly select scouters from the sparrow population and update their positions by using Equation (5).
- Step 6: Compute the fitness value for each sparrow and sort them. When the sparrow individuals gather to a certain extent, apply the Cauchy perturbation strategy to disturb the optimal sparrow position.
- Step 7: Compare the newly perturbed fitness value with the original value and update individual positions accordingly.
- Step 8: Determine whether the maximum iteration count has been reached. If true, end the loop, output, and record the optimal result. If not, proceed to step 3.
- Step 9: Output the global optimal path and its corresponding fitness value.
3. Integration of Enhanced DWA for Dynamic Path Planning
3.1. Improvements to the DWA
3.1.1. Establishment of Robot Kinematic Model
3.1.2. Velocity Sampling
- (1)
- Robot’s Maximum and Minimum Velocities:
- (2)
- Robot’s Intrinsic Constraints
- (3)
- Constraints on Obstacle Safety Distance
3.1.3. Adaptive Velocity Adjustment Strategy
3.1.4. Optimization of DWA’s Evaluation Function
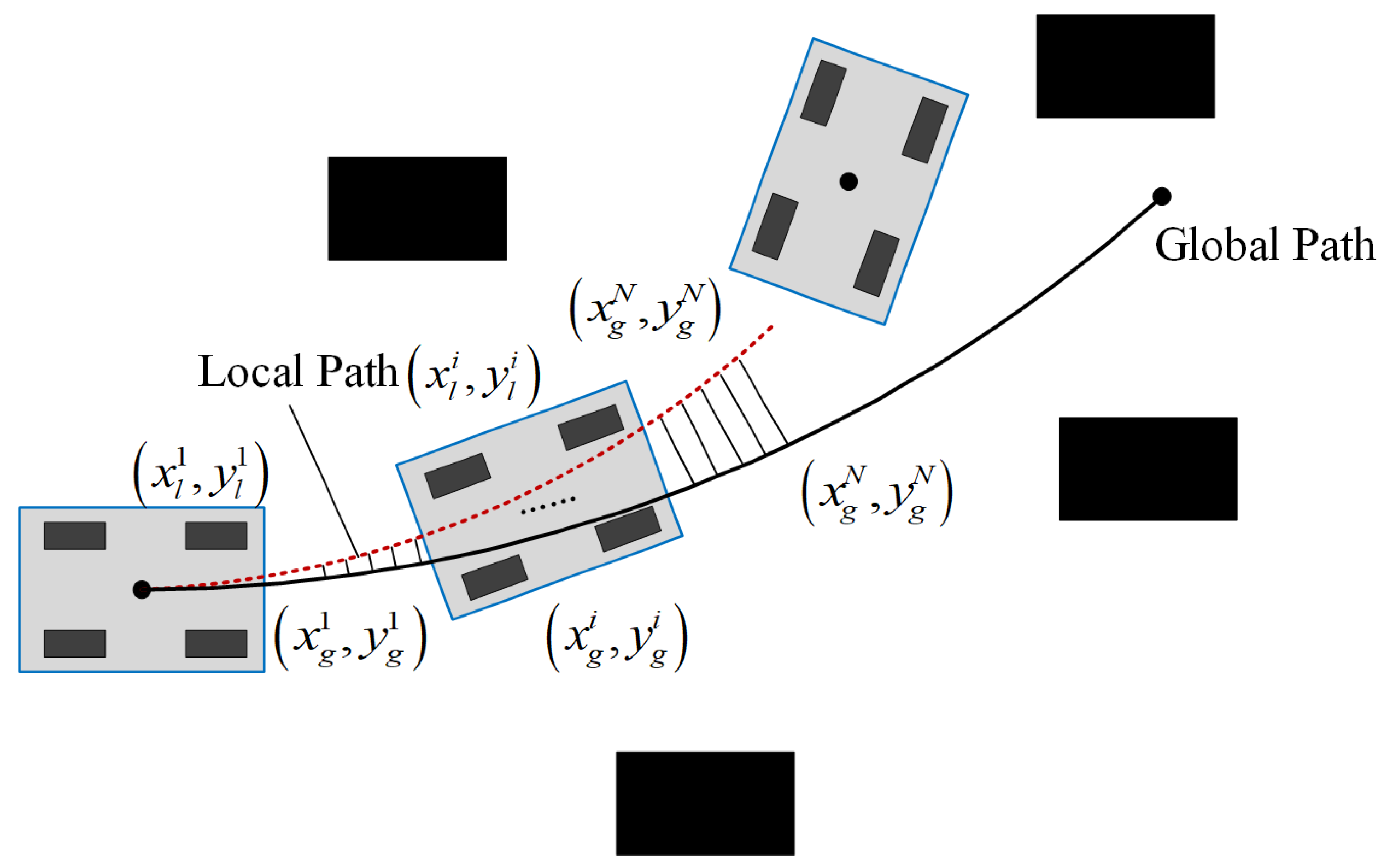
3.2. Fusion Algorithm for Dynamic Path Planning
4. Simulation and Experimental Results Analysis
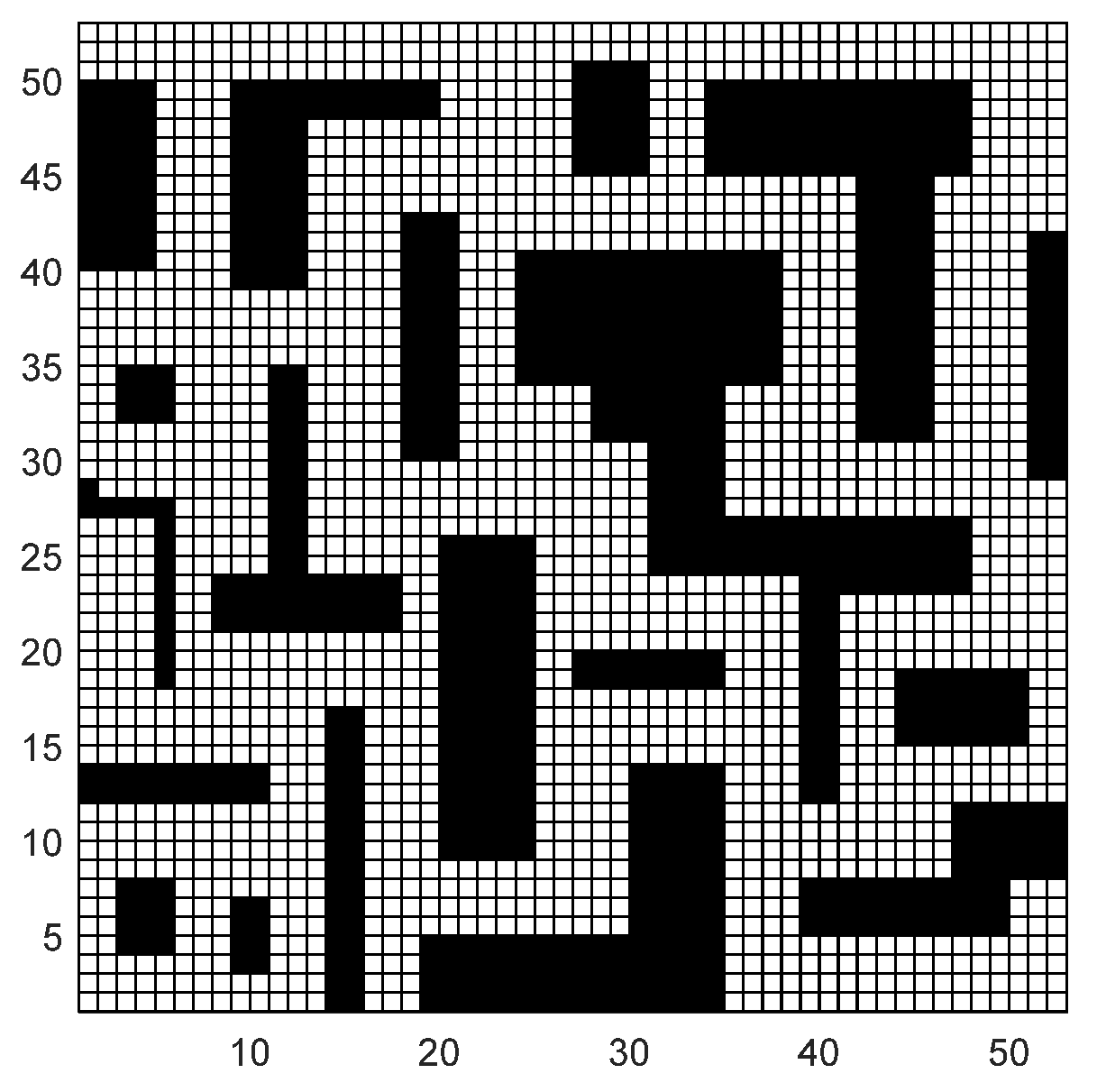
4.1. Environment Modeling
4.2. Simulation Experimental Environment
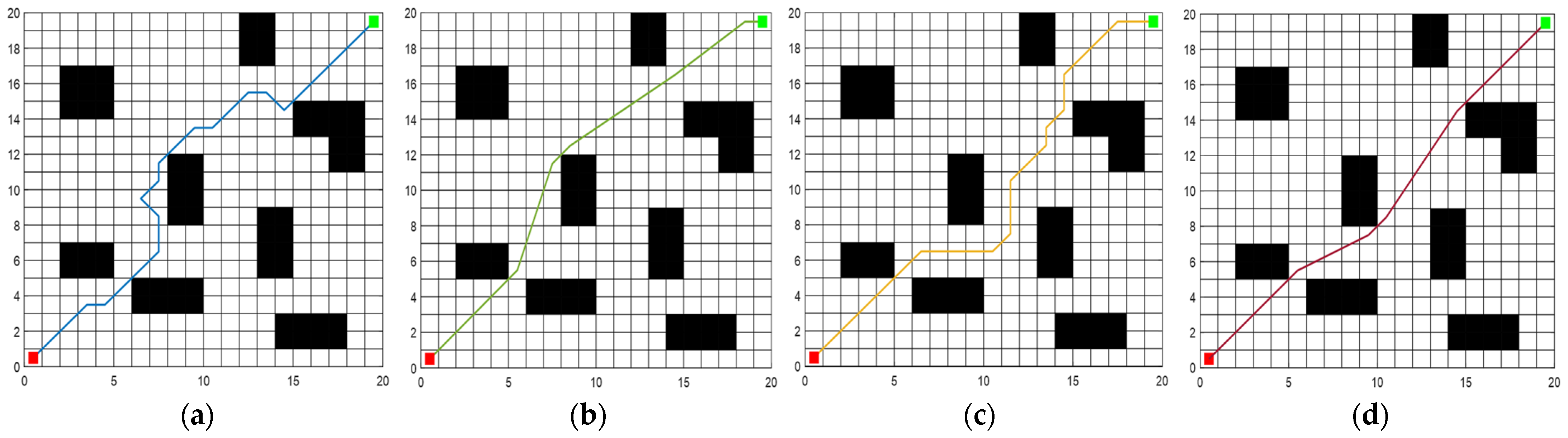
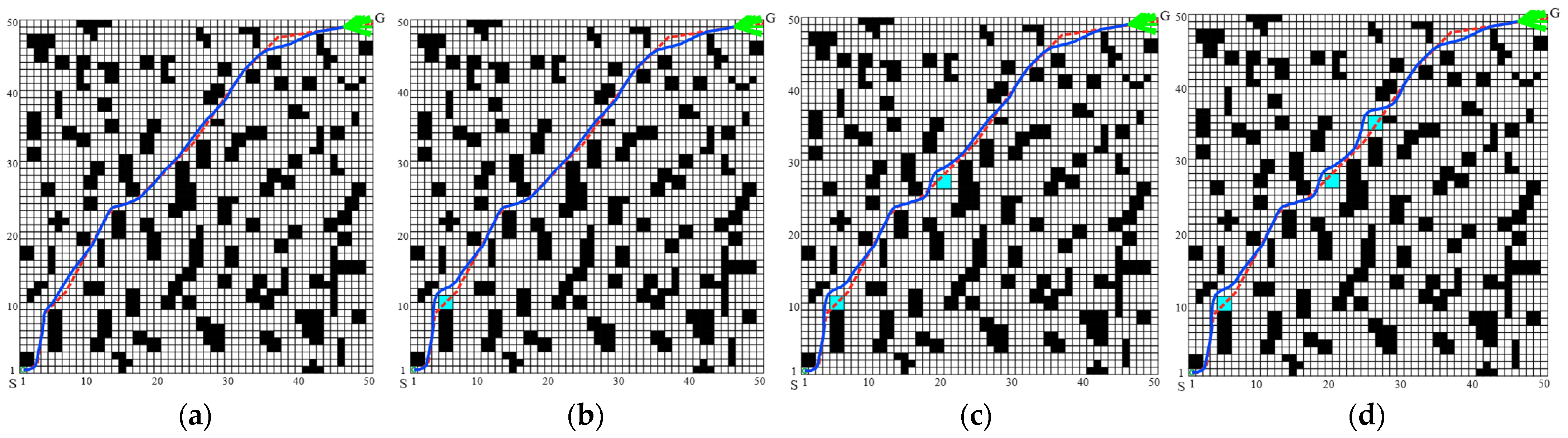
4.3. Simulation Comparative Experiment of MISSA Global Path Planning
4.3.1. Environment Model 1
4.3.2. Environment Model 2
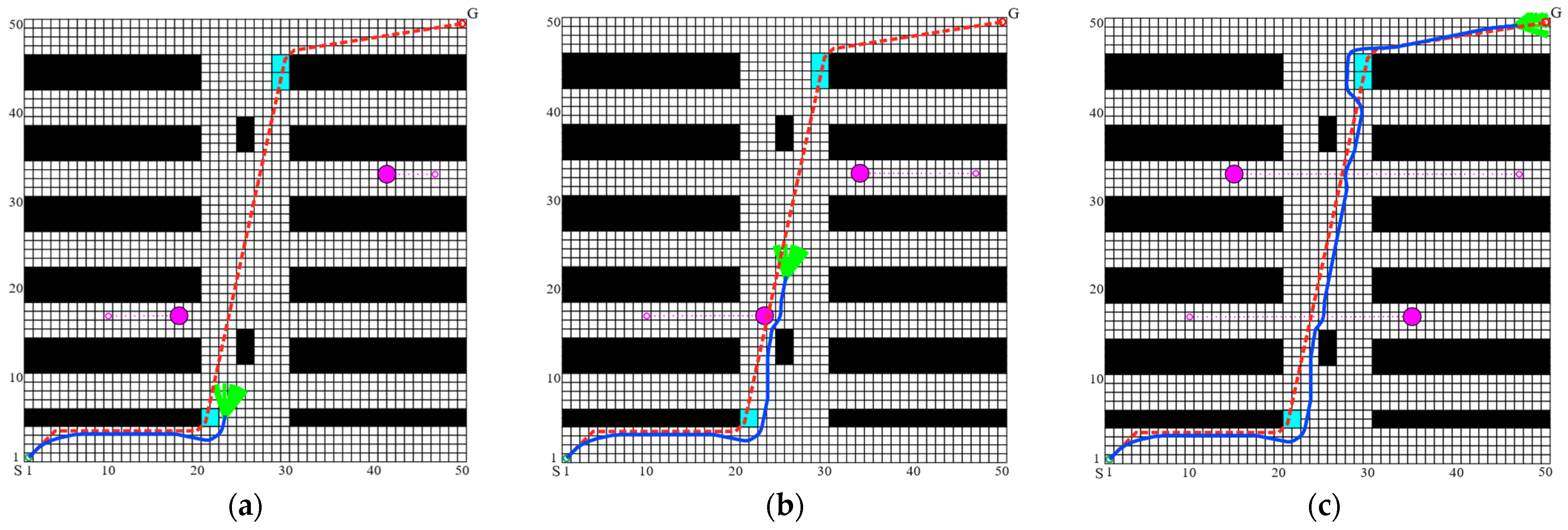
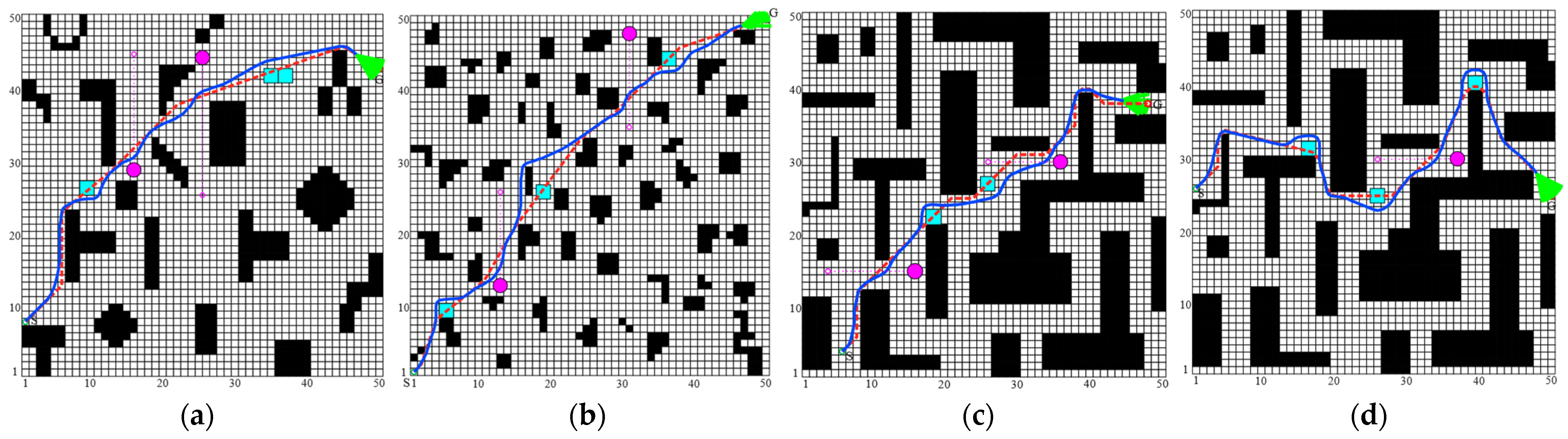
4.4. Analysis of Random Obstacle Avoidance in the Fusion Algorithm
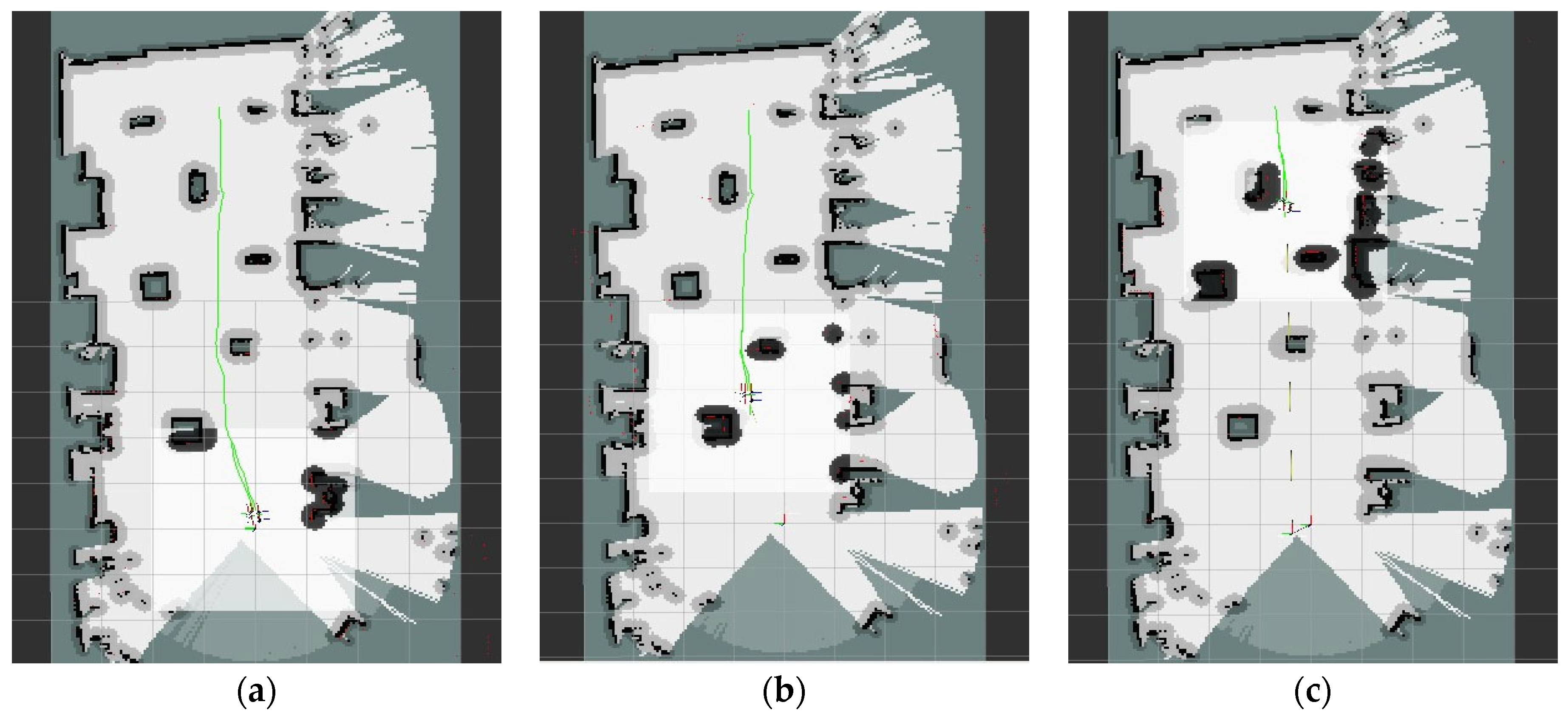
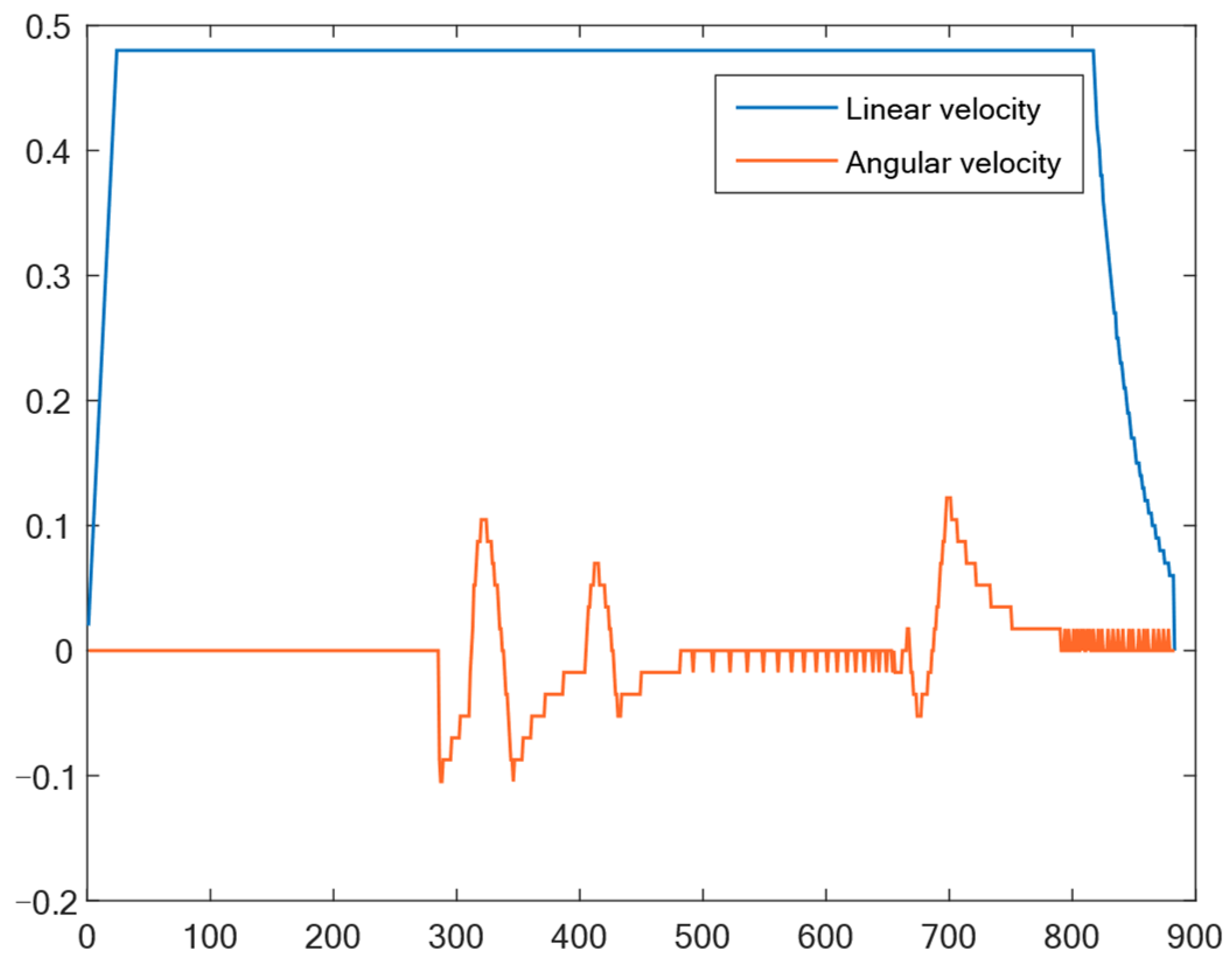
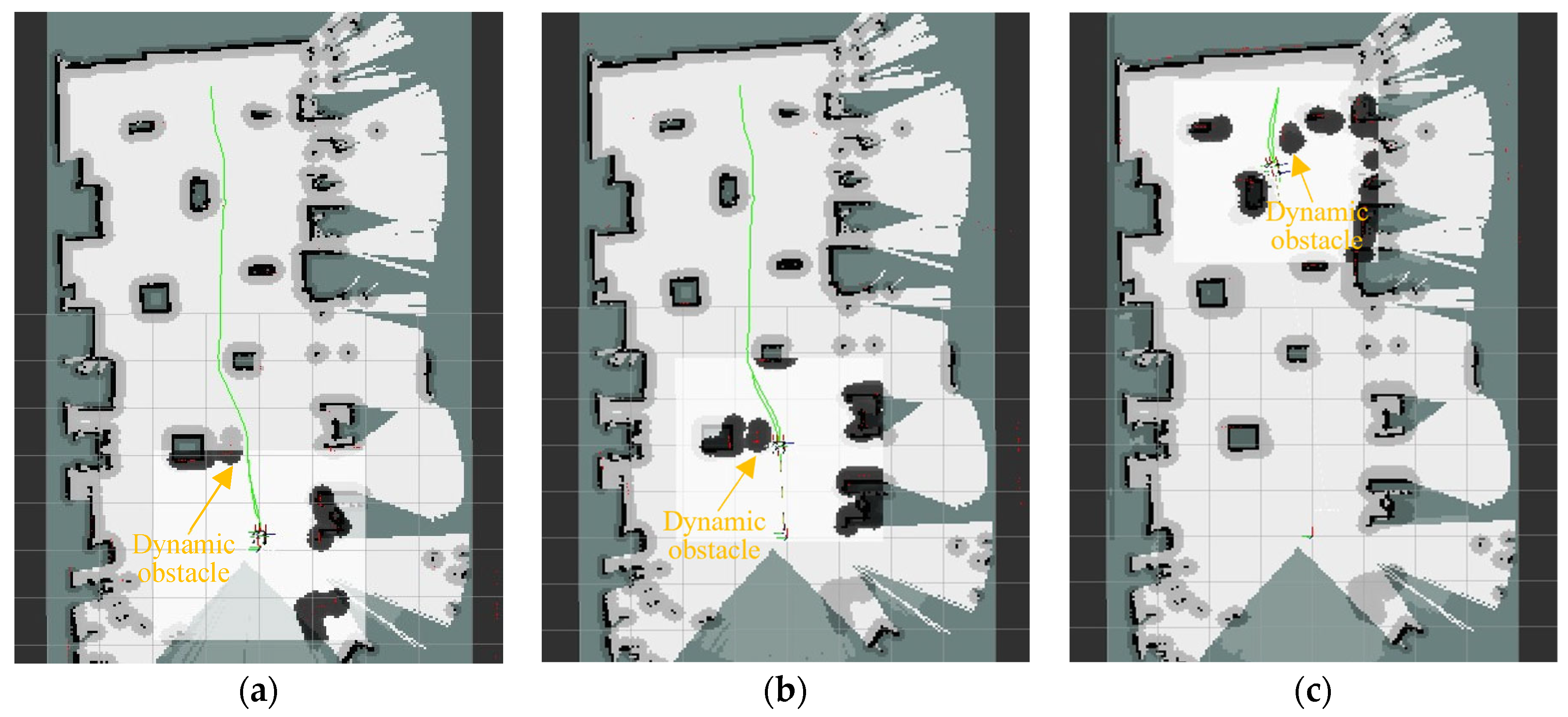
4.5. Dynamic Path Planning with the Fusion Algorithm
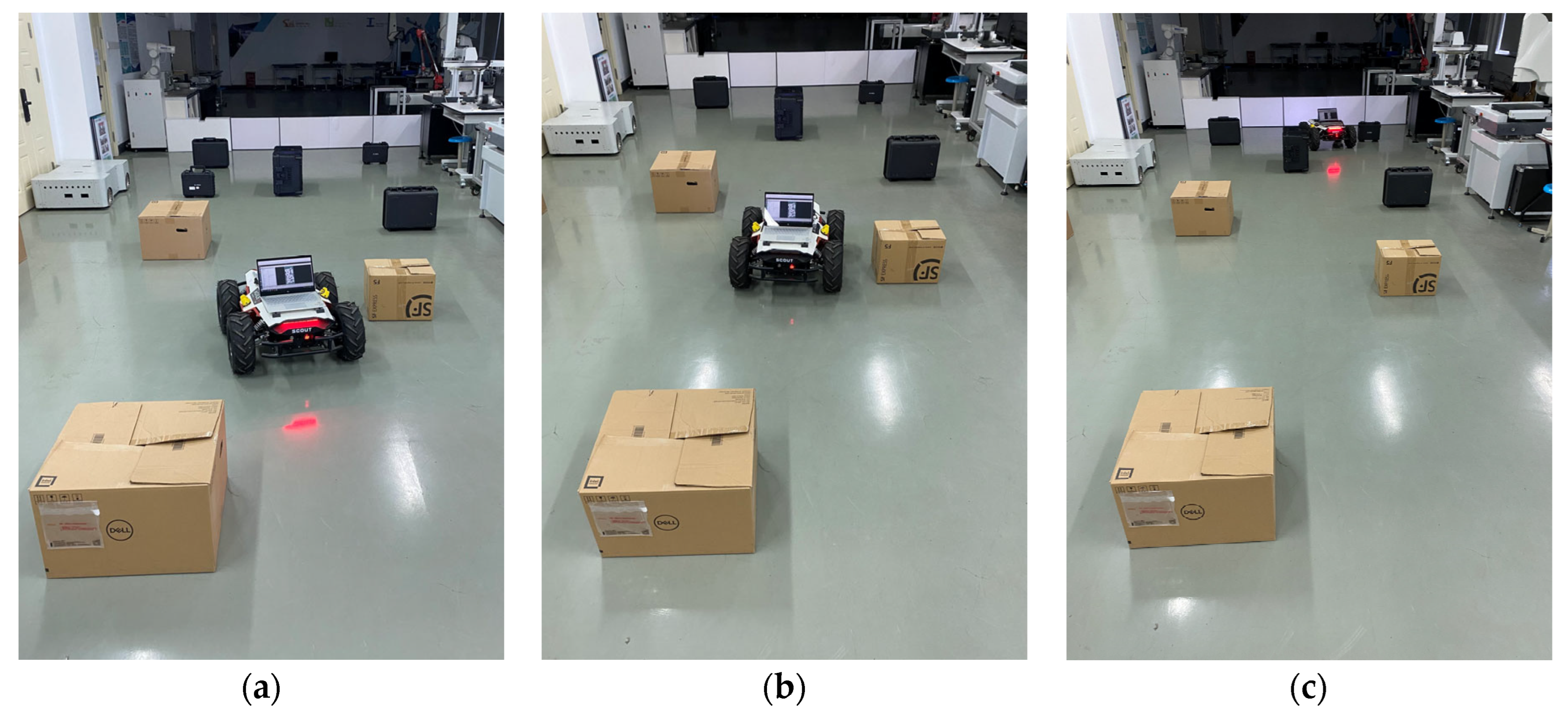
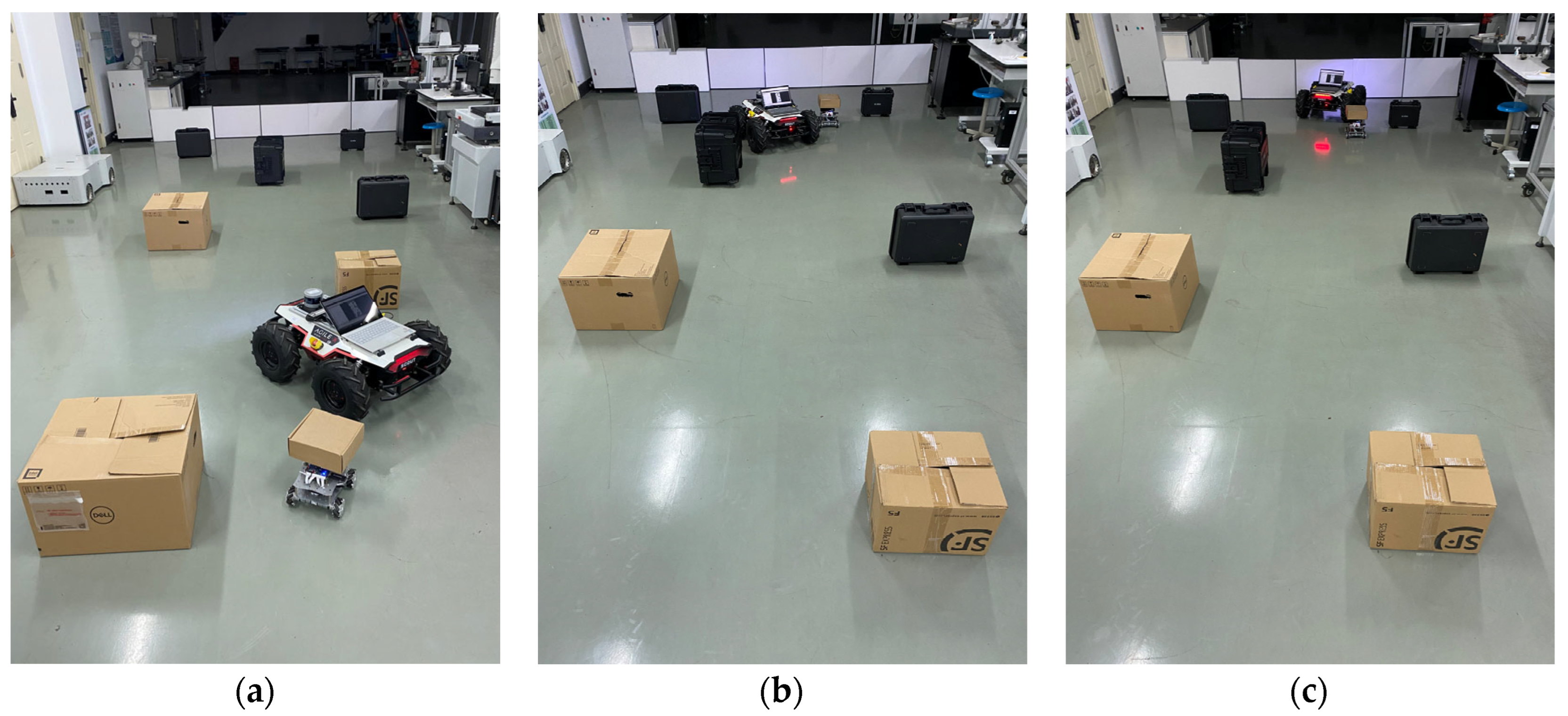
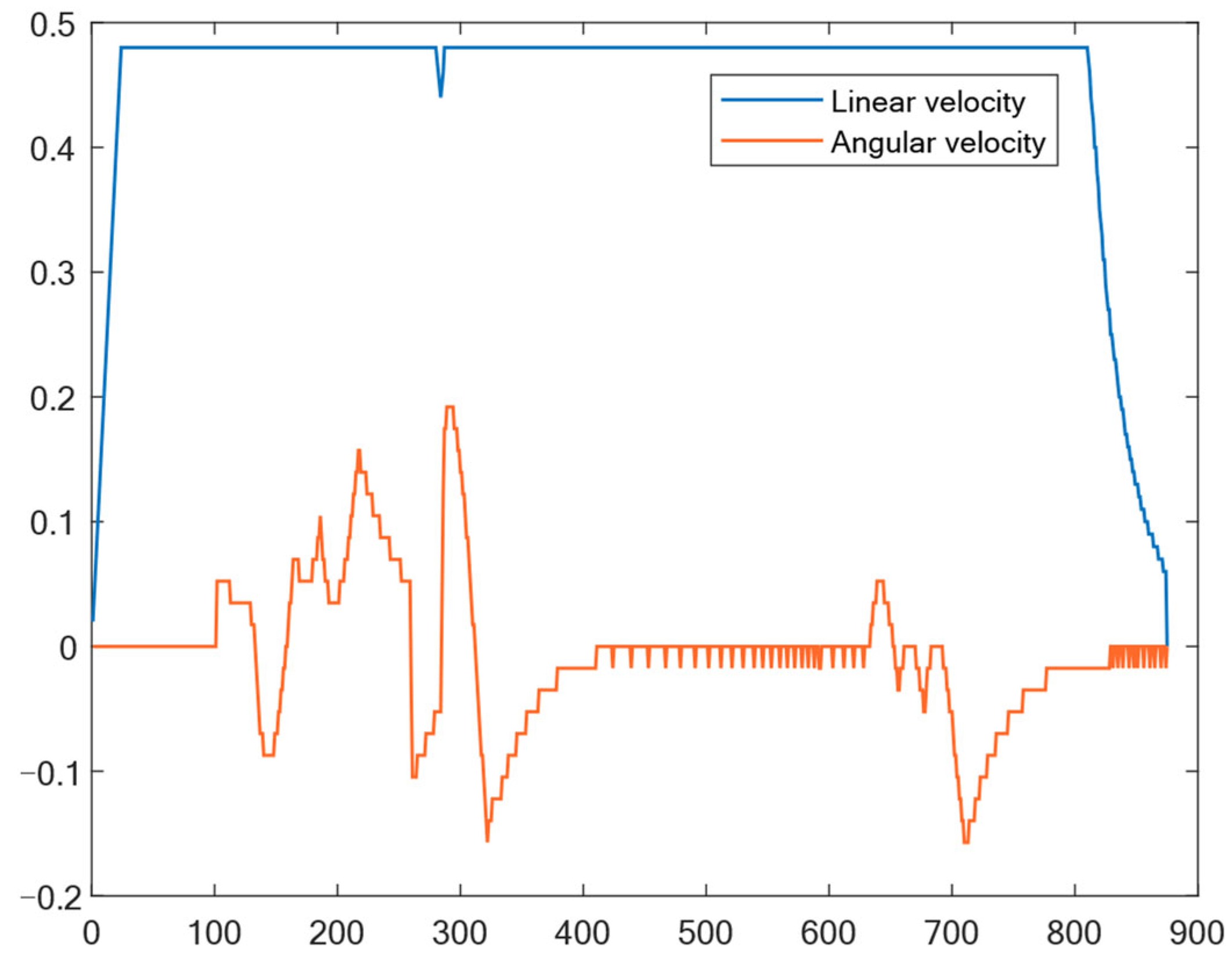
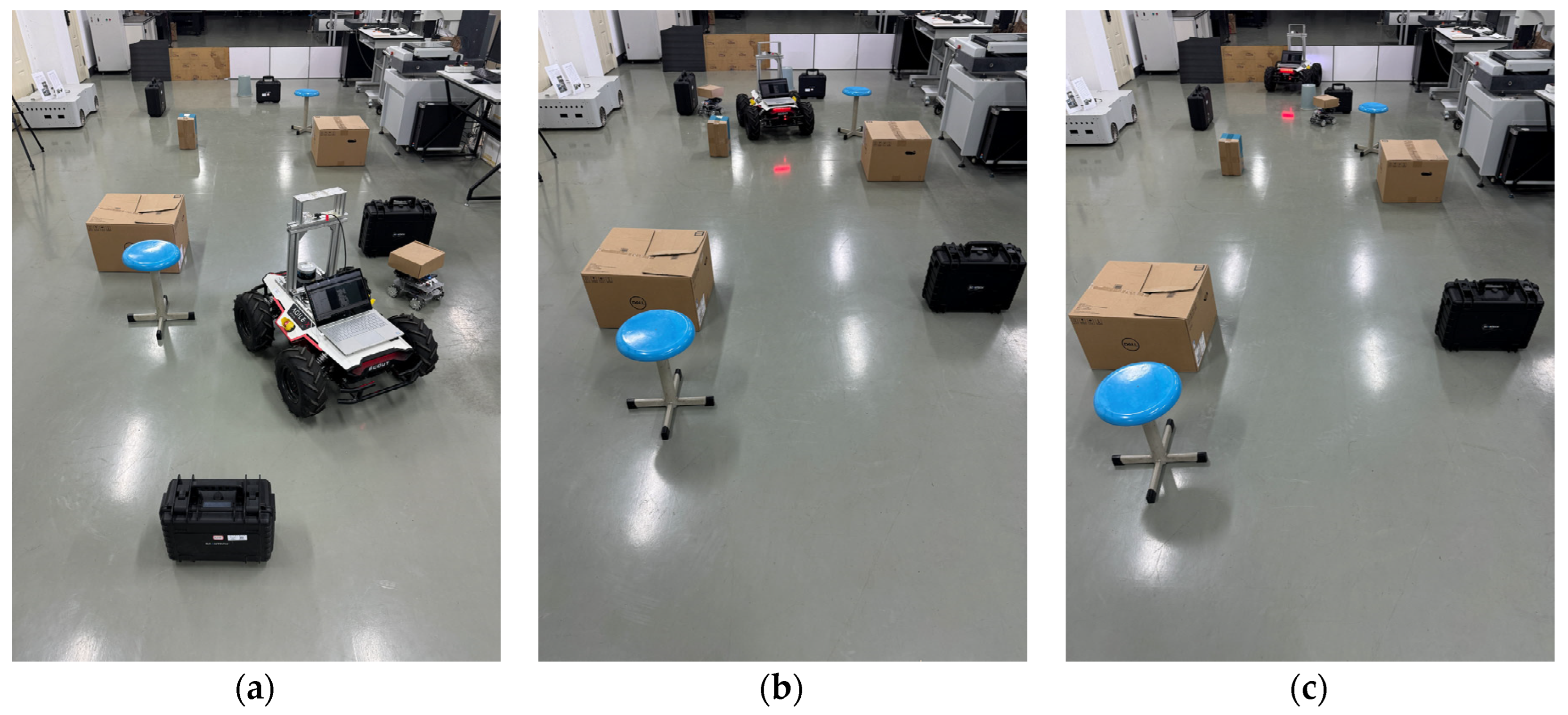
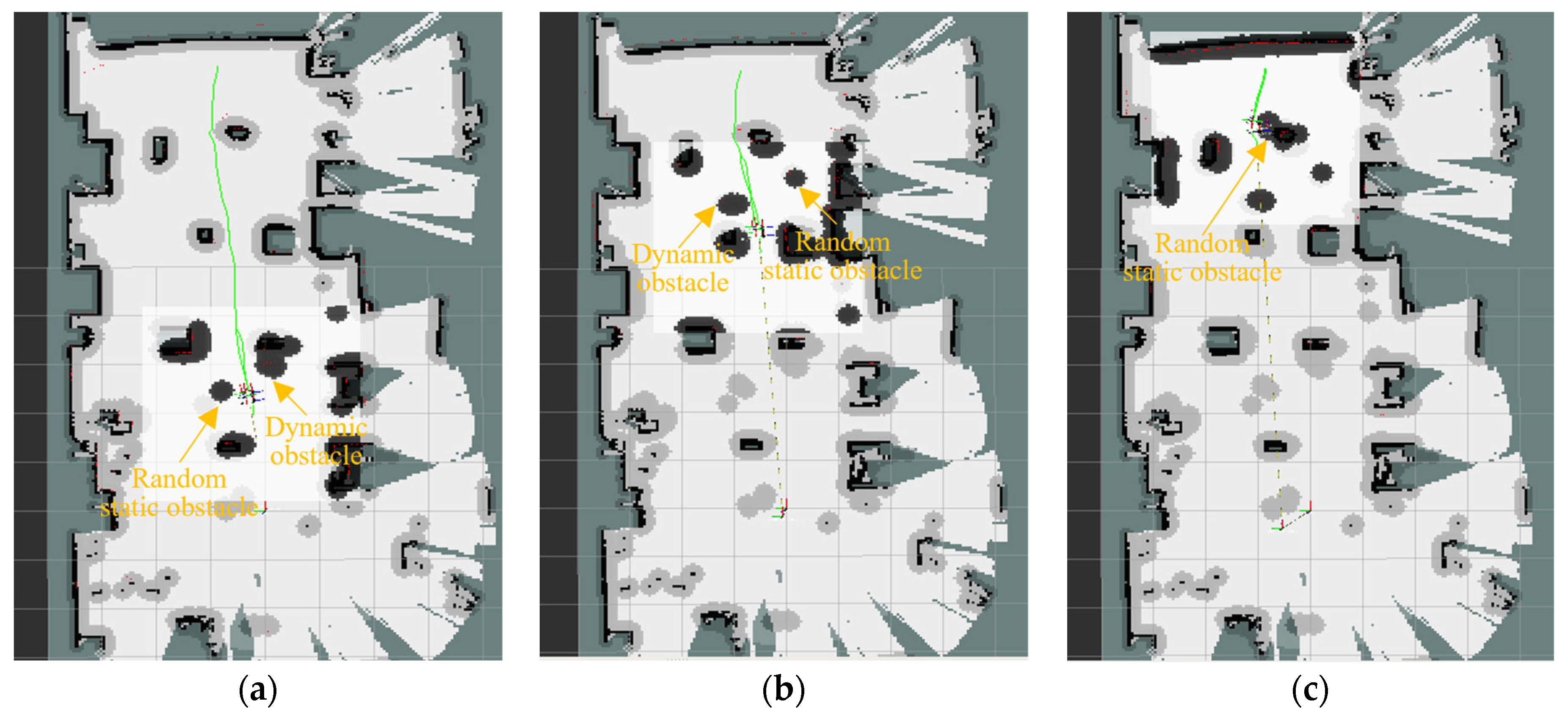
4.6. Experimental Validation
5. Conclusions
- Initially, logistic–tent chaotic mapping is utilized to initialize the sparrow population, generating a relatively evenly distributed and stable initial population. Subsequently, an elite reverse learning strategy is employed to select producers, which forms the foundation for algorithm stability. Following this, a dynamic self-adaptive position update strategy is integrated to enhance the optimization capability of the algorithm. This improvement involves refining the position update formulas for both producers and scroungers. Additionally, the Lévy flight strategy is applied to update the positions of scroungers, accompanied by the incorporation of a best position perturbation strategy to further enhance the algorithm’s ability to escape local optima. Through comparative experiments in static environments and obstacle avoidance experiments in various dynamic environment scenarios, the results demonstrate that the global paths planned by MISSA outperform those generated by the other three comparative algorithms in terms of path length, total rotation angle, and algorithm runtime. These findings underscore MISSA’s robust path optimization capability and stability.
- The evaluation function of the DWA is refined, and an adaptive velocity adjustment strategy is introduced. Subsequently, MISSA is integrated with the optimized DWA, utilizing the key points of the global path generated by MISSA as local sub-goals for the DWA. This integration results in the development of MISSA-DWA. Through path-planning experiments conducted in diverse dynamic environments and scenarios, it is concluded that the integrated MISSA-DWA algorithm not only devises globally optimal paths but also excels in generating smooth paths while dynamically navigating around obstacles. It effectively avoids unidentified obstructions, ensuring the secure arrival of the robot at the target destination. This enhancement significantly improves the efficiency and safety of the robot’s movement.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Duan, L.-M. Path Planning for Batch Picking of Warehousing and Logistics Robots Based on Modified A* Algorithm. Int. J. Onl. Eng. 2018, 14, 176. [Google Scholar] [CrossRef]
- Tong, X.; Yu, S.; Liu, G.; Niu, X.; Xia, C.; Chen, J.; Yang, Z.; Sun, Y. A Hybrid Formation Path Planning Based on A* and Multi-Target Improved Artificial Potential Field Algorithm in the 2D Random Environments. Adv. Eng. Inform. 2022, 54, 101755. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, J.; Guo, Q. Application of Automated Guided Vehicles in Smart Automated Warehouse Systems: A Survey. Comput. Model. Eng. Sci. 2022, 134, 1529–1563. [Google Scholar] [CrossRef]
- Suresh, K.S.; Venkatesan, R.; Venugopal, S. Mobile Robot Path Planning Using Multi-Objective Genetic Algorithm in Industrial Automation. Soft Comput. 2022, 26, 7387–7400. [Google Scholar] [CrossRef]
- Bai, X.; Jiang, H.; Cui, J.; Lu, K.; Chen, P.; Zhang, M. UAV Path Planning Based on Improved A∗ and DWA Algorithms. Int. J. Aerosp. Eng. 2021, 2021, 4511252. [Google Scholar] [CrossRef]
- Hu, X.; Luo, Z.; Jiang, W. AGV Localization System Based on Ultra-Wideband and Vision Guidance. Electronics 2020, 9, 448. [Google Scholar] [CrossRef]
- Zhong, X.; Tian, J.; Hu, H.; Peng, X. Hybrid Path Planning Based on Safe A* Algorithm and Adaptive Window Approach for Mobile Robot in Large-Scale Dynamic Environment. J. Intell. Robot. Syst. 2020, 99, 65–77. [Google Scholar] [CrossRef]
- Soltani, A.R.; Tawfik, H.; Goulermas, J.Y.; Fernando, T. Path Planning in Construction Sites: Performance Evaluation of the Dijkstra, A∗, and GA Search Algorithms. Adv. Eng. Inform. 2002, 16, 291–303. [Google Scholar] [CrossRef]
- Han, X.; Zhang, X.; Zhang, H. Trajectory Planning of USV: On-Line Computation of the Double S Trajectory Based on Multi-Scale A* Algorithm with Reeds–Shepp Curves. J. Mar. Sci. Eng. 2023, 11, 153. [Google Scholar] [CrossRef]
- Jhong, B.-G.; Chen, M.-Y. An Enhanced Navigation Algorithm with an Adaptive Controller for Wheeled Mobile Robot Based on Bidirectional RRT. Actuators 2022, 11, 303. [Google Scholar] [CrossRef]
- Wang, Q.; Li, J.; Yang, L.; Yang, Z.; Li, P.; Xia, G. Distributed Multi-Mobile Robot Path Planning and Obstacle Avoidance Based on ACO–DWA in Unknown Complex Terrain. Electronics 2022, 11, 2144. [Google Scholar] [CrossRef]
- Chen, T.J.; Sun, Y.; Dai, W.; Tao, W.; Liu, S. On the Shortest and Conflict-Free Path Planning of Multi-AGV System Based on Dijkstra Algorithm and the Dynamic Time-Window Method. Adv. Mater. Res. 2013, 645, 267–271. [Google Scholar] [CrossRef]
- Li, X.; Jiao, T.; Ma, J.; Duan, D.; Liang, S. LSDA-APF: A Local Obstacle Avoidance Algorithm for Unmanned Surface Vehicles Based on 5G Communication Environment. Comput. Model. Eng. Sci. 2023, 138, 595–617. [Google Scholar] [CrossRef]
- Wang, J.; Luo, Y.; Tan, X. Path Planning for Automatic Guided Vehicles (AGVs) Fusing MH-RRT with Improved TEB. Actuators 2021, 10, 314. [Google Scholar] [CrossRef]
- Miao, C.; Chen, G.; Yan, C.; Wu, Y. Path Planning Optimization of Indoor Mobile Robot Based on Adaptive Ant Colony Algorithm. Comput. Ind. Eng. 2021, 156, 107230. [Google Scholar] [CrossRef]
- Sui, F.; Tang, X.; Dong, Z.; Gan, X.; Luo, P.; Sun, J. ACO+PSO+A*: A Bi-Layer Hybrid Algorithm for Multi-Task Path Planning of an AUV. Comput. Ind. Eng. 2023, 175, 108905. [Google Scholar] [CrossRef]
- Gul, F.; Rahiman, W.; Alhady, S.S.N.; Ali, A.; Mir, I.; Jalil, A. Meta-Heuristic Approach for Solving Multi-Objective Path Planning for Autonomous Guided Robot Using PSO–GWO Optimization Algorithm with Evolutionary Programming. J. Ambient. Intell. Hum. Comput. 2021, 12, 7873–7890. [Google Scholar] [CrossRef]
- Liang, J.-H.; Lee, C.-H. Efficient Collision-Free Path-Planning of Multiple Mobile Robots System Using Efficient Artificial Bee Colony Algorithm. Adv. Eng. Softw. 2015, 79, 47–56. [Google Scholar] [CrossRef]
- Zheng, Y.; Luo, Q.; Wang, H.; Wang, C.; Chen, X. Path Planning of Mobile Robot Based on Adaptive Ant Colony Algorithm. J. Intell. Fuzzy Syst. 2020, 39, 5329–5338. [Google Scholar] [CrossRef]
- Raj, R.; Kos, A. An Optimized Energy and Time Constraints-Based Path Planning for the Navigation of Mobile Robots Using an Intelligent Particle Swarm Optimization Technique. Appl. Sci. 2023, 13, 9667. [Google Scholar] [CrossRef]
- Dong, L.; Yuan, X.; Yan, B.; Song, Y.; Xu, Q.; Yang, X. An Improved Grey Wolf Optimization with Multi-Strategy Ensemble for Robot Path Planning. Sensors 2022, 22, 6843. [Google Scholar] [CrossRef]
- Eshtehardian, S.A.; Khodaygan, S. A Continuous RRT*-Based Path Planning Method for Non-Holonomic Mobile Robots Using B-Spline Curves. J. Ambient. Intell. Hum. Comput. 2023, 14, 8693–8702. [Google Scholar] [CrossRef]
- Zhang, Y.; Wen, Y.; Tu, H. A Method for Ship Route Planning Fusing the Ant Colony Algorithm and the A* Search Algorithm. IEEE Access 2023, 11, 15109–15118. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A Novel Swarm Intelligence Optimization Approach: Sparrow Search Algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Zhang, X.; Xiao, F.; Tong, X.; Yun, J.; Liu, Y.; Sun, Y.; Tao, B.; Kong, J.; Xu, M.; Chen, B. Time Optimal Trajectory Planing Based on Improved Sparrow Search Algorithm. Front. Bioeng. Biotechnol. 2022, 10, 852408. [Google Scholar] [CrossRef]
- Liu, G.; Shu, C.; Liang, Z.; Peng, B.; Cheng, L. A Modified Sparrow Search Algorithm with Application in 3d Route Planning for UAV. Sensors 2021, 21, 1224. [Google Scholar] [CrossRef]
- Zhou, S.; Xie, H.; Zhang, C.; Hua, Y.; Sui, X. Wavefront-Shaping Focusing Based on a Modified Sparrow Search Algorithm. Optik-Int. J. Light. Electron. Opt. 2021, 244, 167516. [Google Scholar] [CrossRef]
- Khedr, A.M.; Vijayan, D.; Salim, A.; Elsway, A.A.; Osamy, W. ESSAIoV: Enhanced Sparrow Search Algorithm-Based Clustering for Internet of Vehicles. Arab. J. Sci. Eng. 2023, 1–27. [Google Scholar] [CrossRef]
- Zhang, Z.; He, R.; Yang, K. A Bioinspired Path Planning Approach for Mobile Robots Based on Improved Sparrow Search Algorithm. Adv. Manuf. 2022, 10, 114–130. [Google Scholar] [CrossRef]
- Geng, J.; Sun, X.; Wang, H.; Bu, X.; Liu, D.; Li, F.; Zhao, Z. A Modified Adaptive Sparrow Search Algorithm Based on Chaotic Reverse Learning and Spiral Search for Global Optimization. Neural Comput. Appl. 2023. [Google Scholar] [CrossRef]
- Khaleel, M.I. Efficient Job Scheduling Paradigm Based on Hybrid Sparrow Search Algorithm and Differential Evolution Optimization for Heterogeneous Cloud Computing Platforms. Internet Things 2023, 22, 100697. [Google Scholar] [CrossRef]
- Lai, X.; Wu, D.; Wu, D.; Li, J.H.; Yu, H. Enhanced DWA Algorithm for Local Path Planning of Mobile Robot. Ind. Robot. Int. J. Robot. Res. Appl. 2023, 50, 186–194. [Google Scholar] [CrossRef]
- Han, S.; Wang, L.; Wang, Y.; He, H. A Dynamically Hybrid Path Planning for Unmanned Surface Vehicles Based on Non-Uniform Theta* and Improved Dynamic Windows Approach. Ocean Eng. 2022, 257, 111655. [Google Scholar] [CrossRef]
- Liu, Q.; Zhang, Y.; Li, M.; Zhang, Z.; Cao, N.; Shang, J. Multi-UAV Path Planning Based on Fusion of Sparrow Search Algorithm and Improved Bioinspired Neural Network. IEEE Access 2021, 9, 124670–124681. [Google Scholar] [CrossRef]
- Khedr, A.M.; Al Aghbari, Z.; Raj, P.P.V. MSSPP: Modified Sparrow Search Algorithm Based Mobile Sink Path Planning for WSNs. Neural Comput. Appl. 2023, 35, 1363–1378. [Google Scholar] [CrossRef]
- Moysis, L.; Petavratzis, E.; Volos, C.; Nistazakis, H.; Stouboulos, I. A Chaotic Path Planning Generator Based on Logistic Map and modulo Tactics. Robot. Auton. Syst. 2020, 124, 103377. [Google Scholar] [CrossRef]
- Li, Y.; Han, M.; Guo, Q. Modified Whale Optimization Algorithm Based on Tent Chaotic Mapping and Its Application in Structural Optimization. KSCE J. Civ. Eng. 2020, 24, 3703–3713. [Google Scholar] [CrossRef]
- Gupta, M.; Gupta, K.K.; Khosravi, M.R.; Shukla, P.K.; Kautish, S.; Shankar, A. An Intelligent Session Key-Based Hybrid Lightweight Image Encryption Algorithm Using Logistic-Tent Map and Crossover Operator for Internet of Multimedia Things. Wirel. Pers. Commun. 2021, 121, 1857–1878. [Google Scholar] [CrossRef]
- Ewees, A.A.; Abd Elaziz, M.; Houssein, E.H. Improved Grasshopper Optimization Algorithm Using Opposition-Based Learning. Expert Syst. Appl. 2018, 112, 156–172. [Google Scholar] [CrossRef]
- Zhang, S.; Luo, Q.; Zhou, Y. Hybrid Grey Wolf Optimizer Using Elite Opposition-Based Learning Strategy and Simplex Method. Int. J. Comput. Intel. Appl. 2017, 16, 1750012. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for Solving Optimization Problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Liu, M.; Yao, X.; Li, Y. Hybrid Whale Optimization Algorithm Enhanced with Lévy Flight and Differential Evolution for Job Shop Scheduling Problems. Appl. Soft Comput. 2020, 87, 105954. [Google Scholar] [CrossRef]
- Chang, L.; Shan, L.; Jiang, C.; Dai, Y. Reinforcement Based Mobile Robot Path Planning with Improved Dynamic Window Approach in Unknown Environment. Auton. Robot. 2021, 45, 51–76. [Google Scholar] [CrossRef]
- Li, C.; Huang, X.; Ding, J.; Song, K.; Lu, S. Global Path Planning Based on a Bidirectional Alternating Search A* Algorithm for Mobile Robots. Comput. Ind. Eng. 2022, 168, 108123. [Google Scholar] [CrossRef]
- Hou, W.; Xiong, Z.; Wang, C.; Chen, H. Enhanced Ant Colony Algorithm with Communication Mechanism for Mobile Robot Path Planning. Robot. Auton. Syst. 2022, 148, 103949. [Google Scholar] [CrossRef]
- Xu, C.; Zhu, H.; Zhu, H.; Wang, J.; Zhao, Q. Improved RRT∗ Algorithm for Automatic Charging Robot Obstacle Avoidance Path Planning in Complex Environments. Comput. Model. Eng. Sci. 2023, 137, 2567–2591. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SSA | Number of Sparrows | Maximum Iterations | Search Dimensions | Alarm Threshold | Producer Ratio | Producer Ratio |
| Parameters | 60 | 300 | 16 | 0.8 | 0.3 | 0.2 |
| ACO | Number of Ants | Maximum Iterations | Pheromone Factor | Heuristic Function Factor | Pheromone Evaporation Factor | Pheromone Constant |
| Parameters | 60 | 300 | 2 | 6 | 0.1 | 5 |
| Algorithm | Path Length/m | Total Rotation Angle | Time/s | |||
|---|---|---|---|---|---|---|
| Minimum | Average | Minimum | Average | Minimum | Average | |
| ACO | 28.1416 | 30.3926 | 425 | 743.45 | 0.4178 | 1.8917 |
| IACO | 27.9073 | 29.8455 | 126 | 187.37 | 2.9614 | 8.5572 |
| SSA | 28.3411 | 32.7429 | 218 | 318.74 | 0.3796 | 1.7083 |
| ISSA | 27.1290 | 27.7306 | 48 | 61.85 | 0.3282 | 0.9935 |
| Algorithm | Path Length/m | Total Rotation Angle | Time/s | |||
|---|---|---|---|---|---|---|
| Minimum | Average | Minimum | Average | Minimum | Average | |
| ACO | 37.8701 | 43.3414 | 748 | 1436.17 | 1.8795 | 4.5309 |
| IACO | 36.6226 | 38.6631 | 585 | 1062.82 | 3.2852 | 9.7443 |
| SSA | 36.1751 | 39.5893 | 472 | 776.16 | 0.7164 | 1.9656 |
| ISSA | 34.3719 | 34.8701 | 316 | 327.63 | 0.5681 | 1.3124 |
| Quantity of Random Obstacles | Path Length/m | Time/s |
|---|---|---|
| No random obstacles | 74.155 | 106.58 |
| One random obstacle | 74.763 | 109.69 |
| Two random obstacles | 75.232 | 113.73 |
| Three random obstacles | 76.206 | 117.62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, J.; Jiang, W.; Luo, Z.; Yang, L.; Hu, X.; Guo, B. Dynamic Path Planning for Mobile Robots by Integrating Improved Sparrow Search Algorithm and Dynamic Window Approach. Actuators 2024, 13, 24. https://doi.org/10.3390/act13010024
Hou J, Jiang W, Luo Z, Yang L, Hu X, Guo B. Dynamic Path Planning for Mobile Robots by Integrating Improved Sparrow Search Algorithm and Dynamic Window Approach. Actuators. 2024; 13(1):24. https://doi.org/10.3390/act13010024
Chicago/Turabian StyleHou, Junting, Wensong Jiang, Zai Luo, Li Yang, Xiaofeng Hu, and Bin Guo. 2024. "Dynamic Path Planning for Mobile Robots by Integrating Improved Sparrow Search Algorithm and Dynamic Window Approach" Actuators 13, no. 1: 24. https://doi.org/10.3390/act13010024
APA StyleHou, J., Jiang, W., Luo, Z., Yang, L., Hu, X., & Guo, B. (2024). Dynamic Path Planning for Mobile Robots by Integrating Improved Sparrow Search Algorithm and Dynamic Window Approach. Actuators, 13(1), 24. https://doi.org/10.3390/act13010024