
Nonlinear Gaussian Filter with Multi-Step Colored Noise

Abstract
:1. Introduction
2. Problem Statement
3. Main Results
3.1. Colored Noises Whitening
3.2. Design Gaussian Filter with Multi-Step Colored Noise
3.2.1. One-Step Prediction
3.2.2. Measurement Update
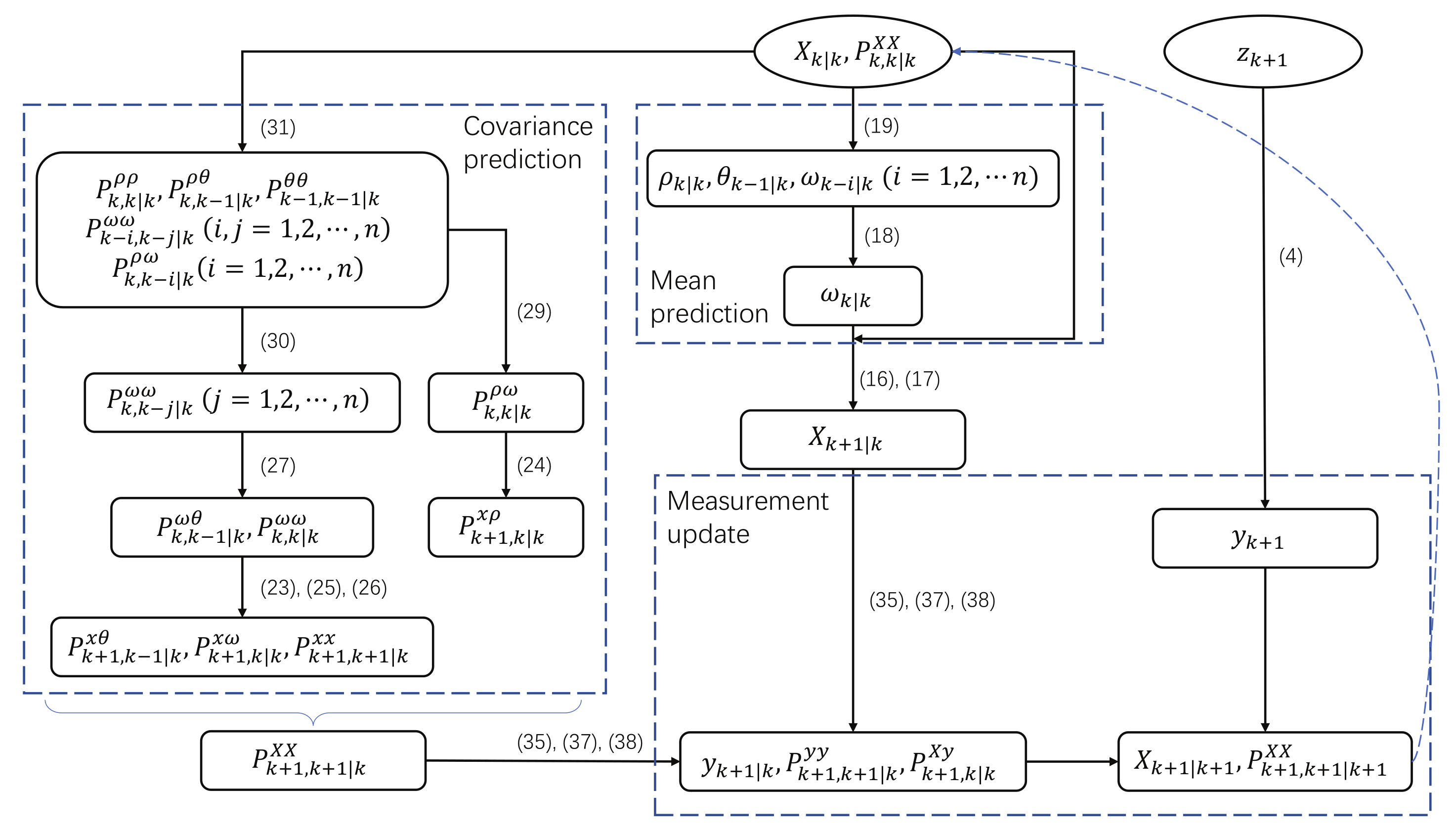
3.3. Implementing the Gaussian Filter Using Third-Degree Spherical-Radial Rule
| Algorithm 1:Cubature Kalman filter with multi-step colored noise. |
|
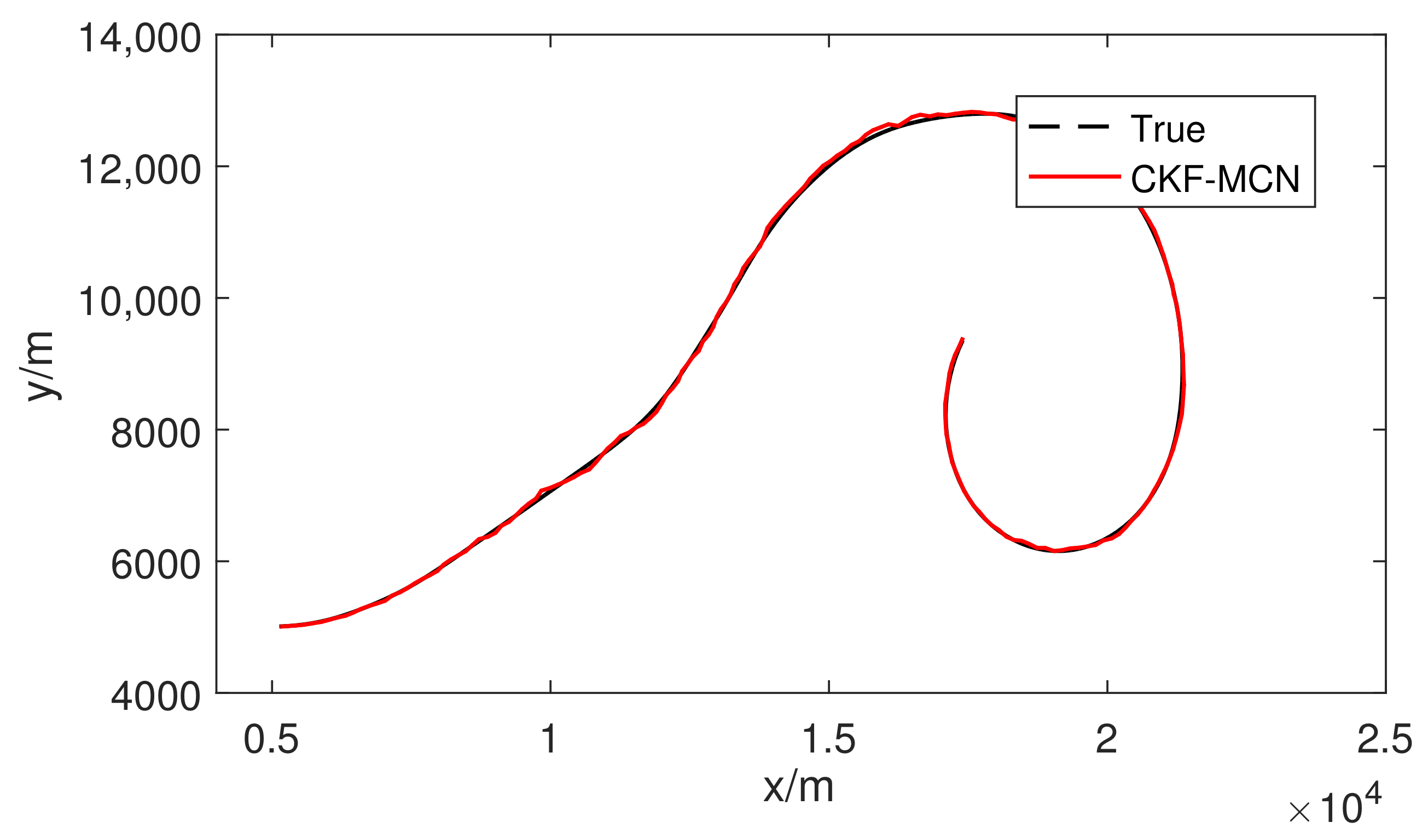
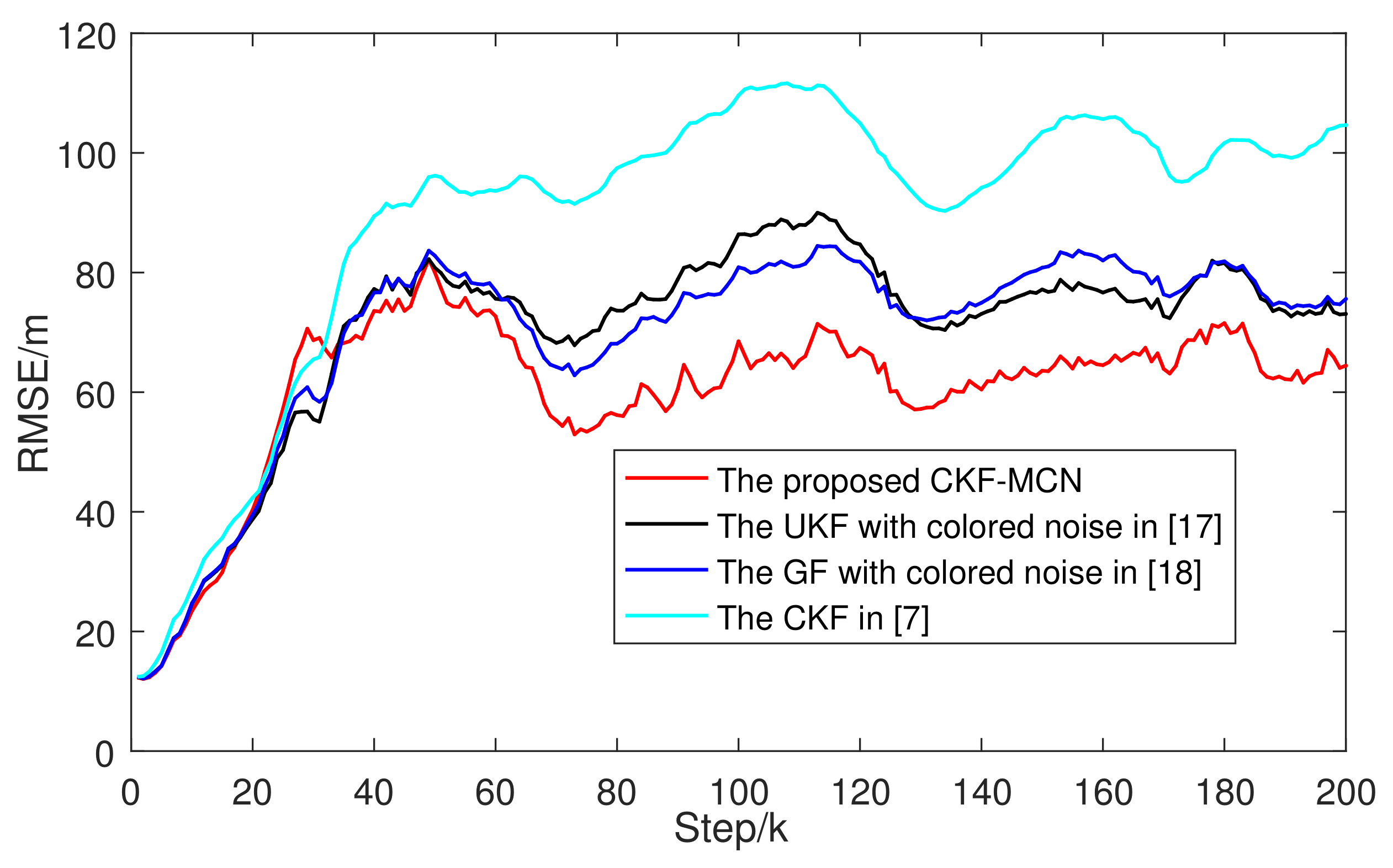
4. Simulation Examples
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| True state | |
| Measurement | |
| Color process noise | |
| Color measurement noise | |
| Whitening state | |
| Whitening measurement | |
| Whitening process noise | |
| Whitening measurement noise | |
| The set of measurement from moment 1 to k | |
| State one-step prediction of | |
| Covariance one-step prediction of | |
| Augmented state | |
| Augmented process noise | |
| Mean of given | |
| Cross-covariance between and given |
References
- Aljuboury, A.S.; Hameed, A.H.; Ajel, A.R.; Humaidi, A.J.; Alkhayyat, A.; Mhdawi, A.K.A. Robust Adaptive Control of Knee Exoskeleton-Assistant System Based on Nonlinear Disturbance Observer. Actuators 2022, 11, 78. [Google Scholar] [CrossRef]
- Su, Y.; Zheng, C.; Mercorelli, P. Robust approximate fixed-time tracking control for uncertain robot manipulators. Mech. Syst. Sig. Process. 2020, 135, 106379. [Google Scholar] [CrossRef]
- Zhou, Y.; Xin, Z.; Fan, Y. Nonlinear filtering application in fault diagnosis. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 2789–2792. [Google Scholar]
- Nunes, F.D.; Leitao, J.M.N. A nonlinear filtering approach to estimation and detection in mobile communications. IEEE J. Sel. Areas Commun. 1998, 16, 1649–1659. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. ASME J. Basic Eng. 1960, 82, 34–45. [Google Scholar] [CrossRef] [Green Version]
- Ito, K.; Xiong, K. Gaussian filters for nonlinear filtering problems. IEEE Trans. Autom. Control 2000, 45, 910–927. [Google Scholar] [CrossRef] [Green Version]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef] [Green Version]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. IEEE Trans. Autom. Control 2004, 92, 401–422. [Google Scholar] [CrossRef] [Green Version]
- Arasaratnam, I.; Haykin, S.; Elliott, R.J. Discrete-time nonlinear filtering algorithms using Gauss-Hermite quadrature. Proc. IEEE 2007, 95, 953–977. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M.; Cheng, Y. High-degree cubature Kalman filter. Automatica 2013, 49, 510–518. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M. Sparse-grid quadrature nonlinear filtering. Automatica 2012, 48, 327–341. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, Y.; Wang, M.; Wu, J.; Zhang, Y. A Computationally Efficient Outlier-Robust Cubature Kalman Filter for Underwater Gravity Matching Navigation. IEEE Trans. Instrum. Meas. 2022, 71, 8500418. [Google Scholar] [CrossRef]
- Chen, B.; Petropulu, A.P. Frequency domain blind MIMO system identification based on second- and higher order statistics. IEEE Trans. Signal Process. 2001, 49, 1677–1688. [Google Scholar]
- Yuan, G.; Xie, Y.; Song, Y.; Liang, H. Multipath parameters estimation of weak GPS signal based on new colored noise unscented Kalman filter. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 1852–1856. [Google Scholar]
- Ning, M.; Bouchard, M.; Goubran, R.A. Dual perceptually constrained unscented Kalman filter for enhancing speech degraded by colored noise. In Proceedings of the 7th International Conference on Signal ProcessingSignal Processin, Beijing, China, 31 August–4 September 2004; pp. 2522–2525. [Google Scholar]
- Yin, W.; Yi, B.; Shen, X. Speech enhancement based unscented particle filter with non-Gaussian noises. Chin. J. of Radio 2009, 24, 476–481. [Google Scholar]
- Xiong, W.; Chen, L.; He, Y.; Zhang, J. Unscented Kalman Filter with Colored Noise. J. Electron. Inf. Technol. 2007, 29, 598–600. [Google Scholar]
- Wang, X.; Pan, Q. Nonlinear Gaussian filter with the colored measurement noise. In Proceedings of the 17th International Conference on Information Fusion (FUSION), Salamanca, Spain, 7–10 July 2014; pp. 1–7. [Google Scholar]
- Gu, X.; Wang, X.; Zhang, Q.; Zhao, Y. Study on the Filtration and Forecast of Helicopter Tracks under Color Noise Background. J. Detect. Control 2000, 22, 49–53. [Google Scholar]
- Zhang, Y.; Huang, Y. Gaussian approximate filter for stochastic dynamic systems with randomly delayed measurements and colored measurement noises. Sci. Chin. (Inf. Sci.) 2016, 59, 161–178. [Google Scholar] [CrossRef] [Green Version]
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teng, Y.; Sheng, S.; Zheng, Y. Nonlinear Gaussian Filter with Multi-Step Colored Noise. Actuators 2022, 11, 103. https://doi.org/10.3390/act11040103
Teng Y, Sheng S, Zheng Y. Nonlinear Gaussian Filter with Multi-Step Colored Noise. Actuators. 2022; 11(4):103. https://doi.org/10.3390/act11040103
Chicago/Turabian StyleTeng, Yidi, Shouzhao Sheng, and Yubin Zheng. 2022. "Nonlinear Gaussian Filter with Multi-Step Colored Noise" Actuators 11, no. 4: 103. https://doi.org/10.3390/act11040103
APA StyleTeng, Y., Sheng, S., & Zheng, Y. (2022). Nonlinear Gaussian Filter with Multi-Step Colored Noise. Actuators, 11(4), 103. https://doi.org/10.3390/act11040103