
Deep Reinforcement Learning for Stability Enhancement of a Variable Wind Speed DFIG System †


Abstract
:1. Introduction
- (a)
- Squirrel-cage induction generator (SCIG) or fixed speed system.
- (b)
- Wound-rotor induction generator (WRIG) with variable rotor resistance.
- (c)
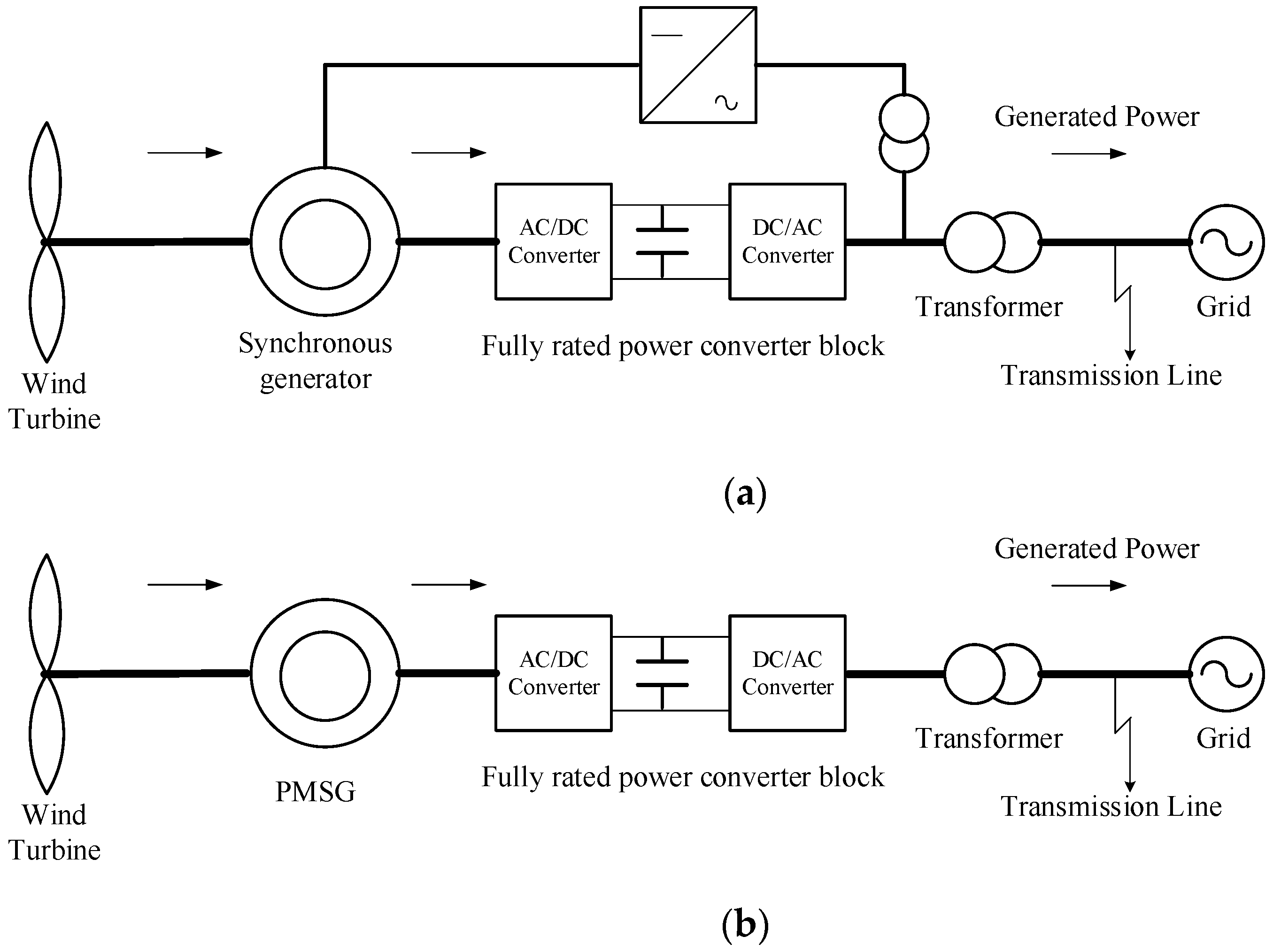
- Doubly fed induction generator.
- (d)
- Full-power converter generator.
2. Literature Review
3. Contributions
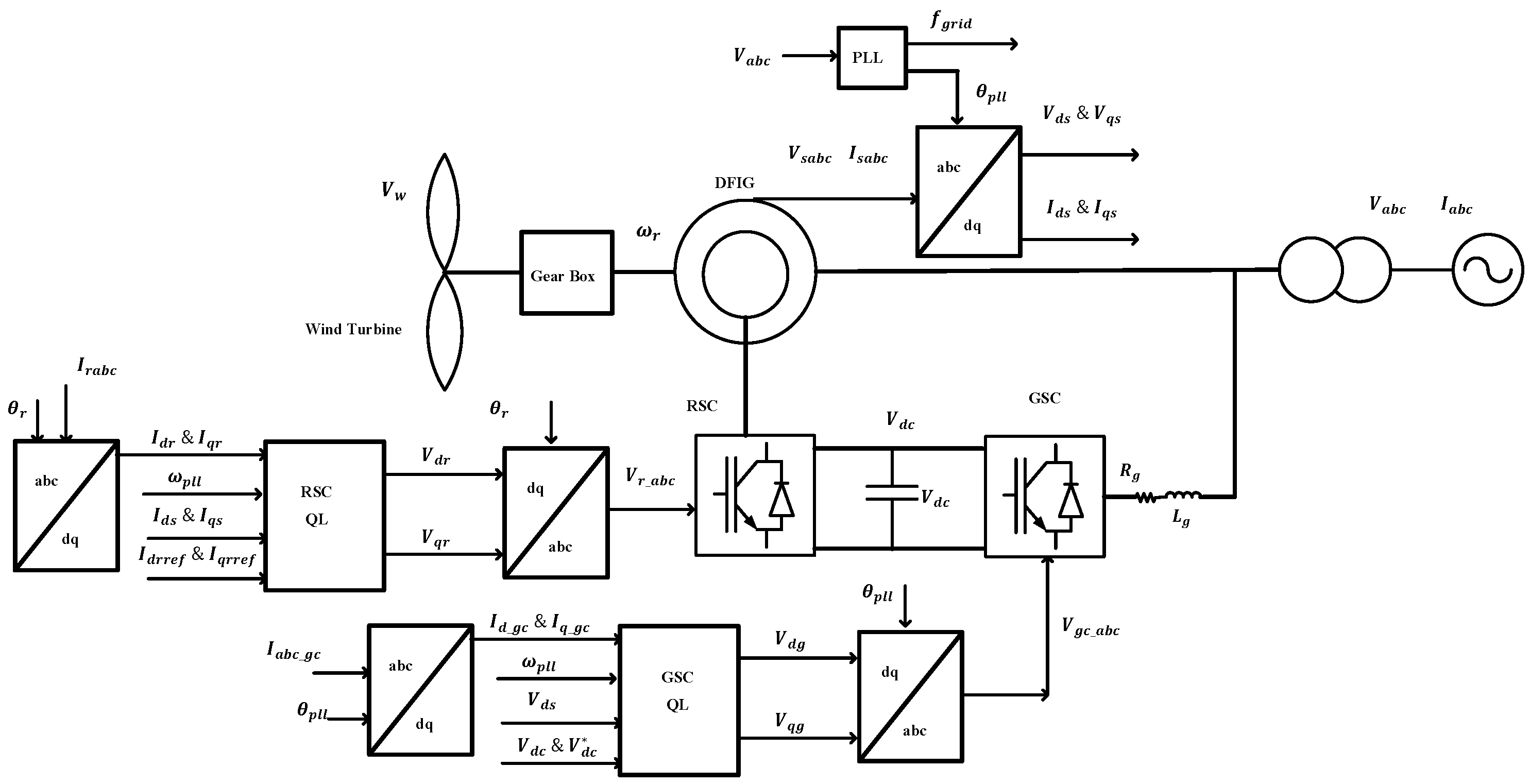
4. Wind Turbine System Structure and Model
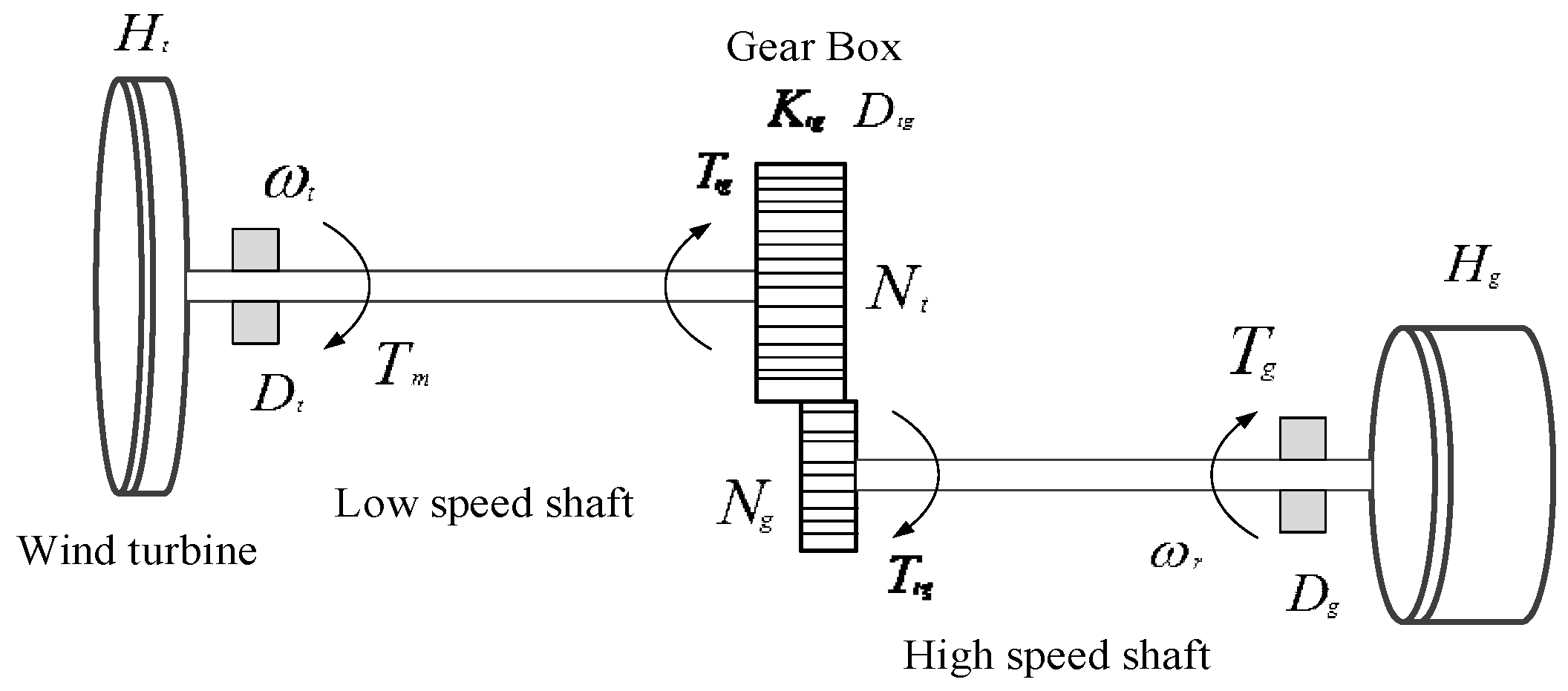
4.1. Design of Drivetrain Model
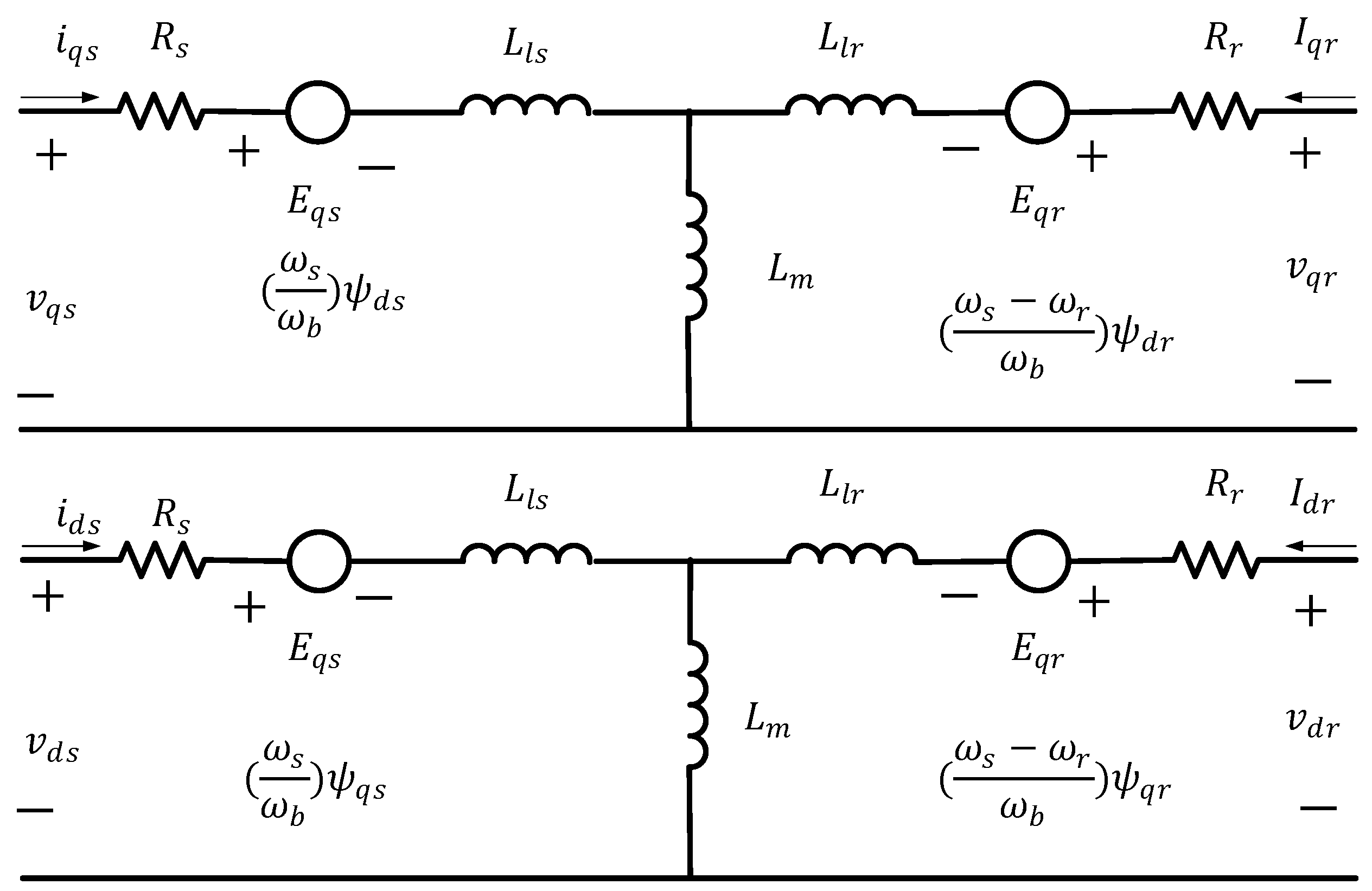
4.2. DFIG Model
4.3. Control Strategies
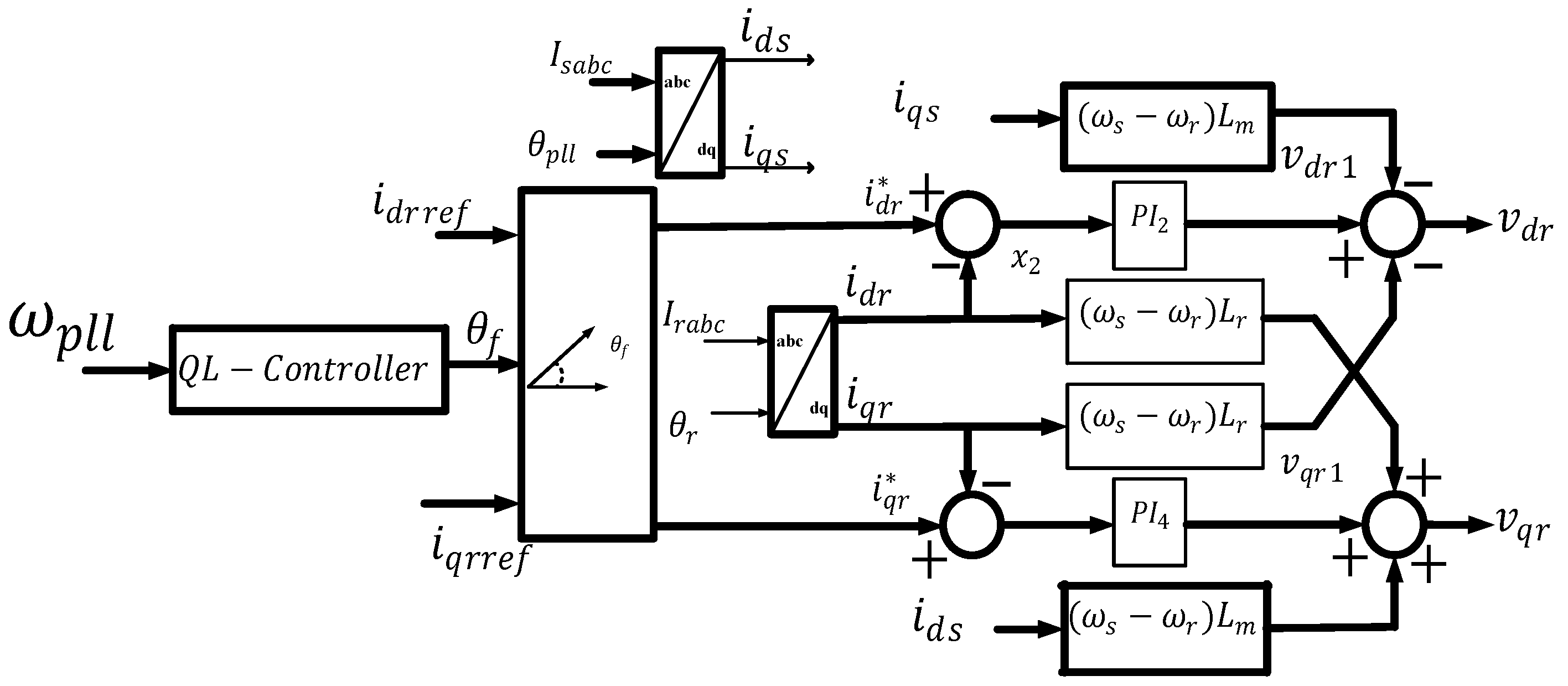
4.4. Rotor-Side Controllers
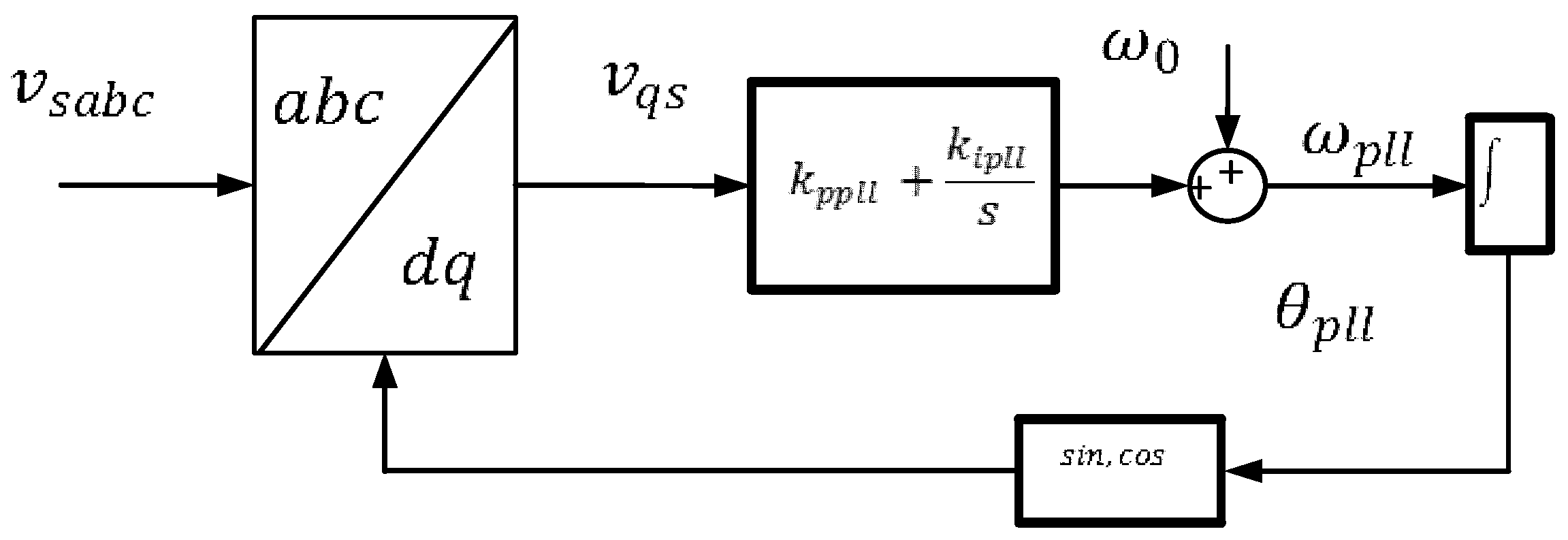
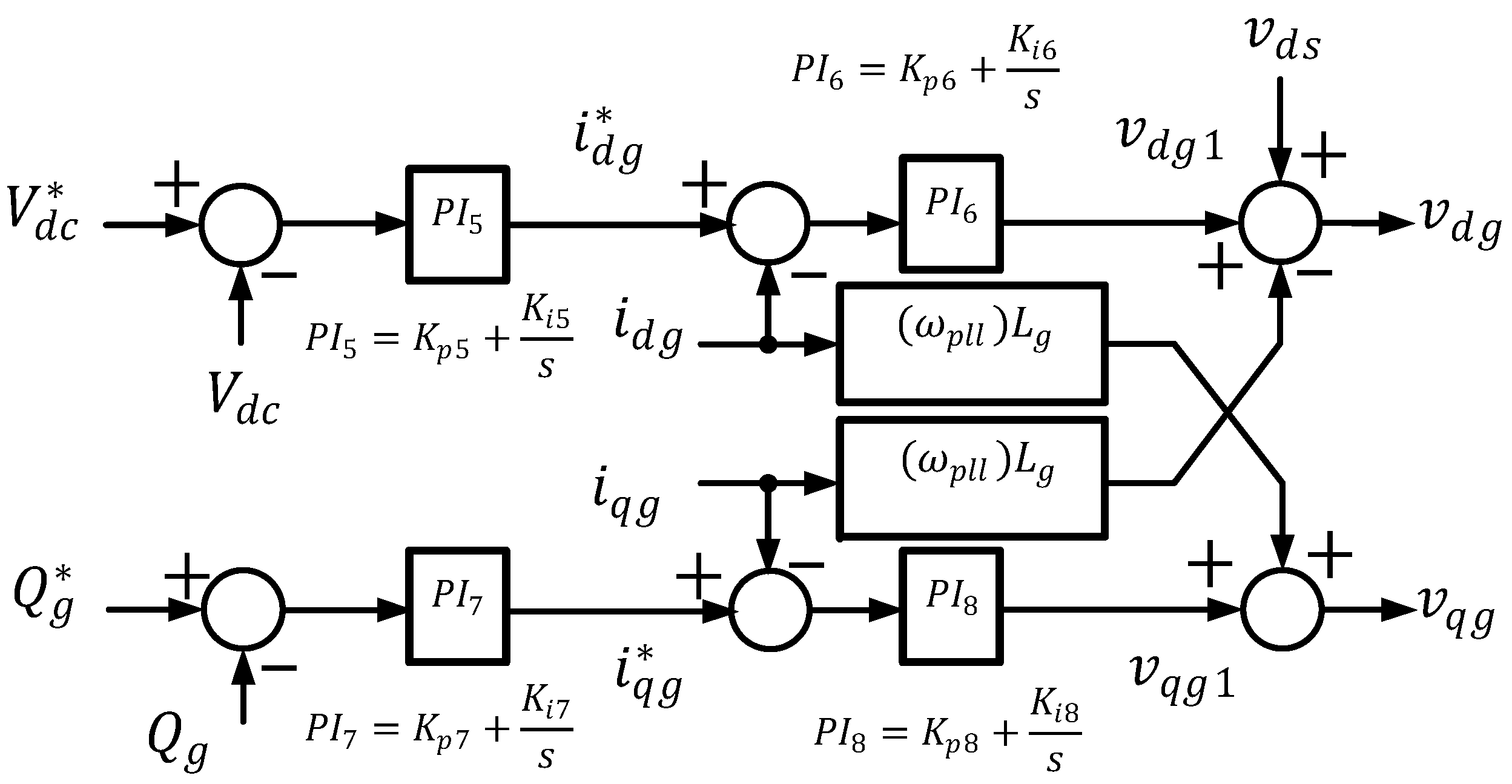
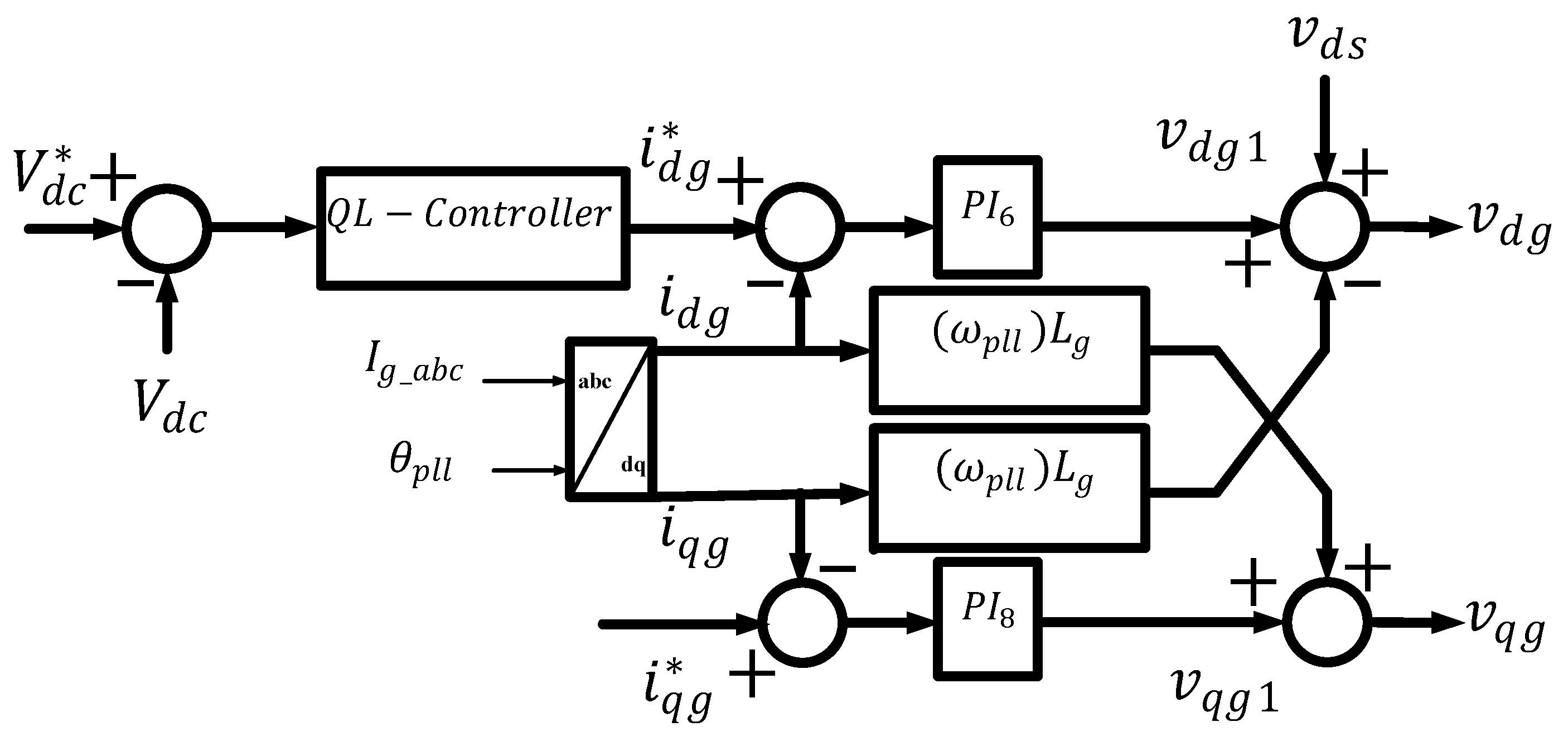
4.5. Grid-Side Controllers
4.6. Grid-Side Inner Current Control Loop
5. Q-Learning (QL) and Twin Delayed Deep Deterministic Policy Gradient (TD3)
- a.
- Clipped double Q-learning:
- b.
- Target networks and delayed policy updates:
- c.
- Target policy smoothing regularization:
6. Deep Reinforcement Learning-Based WECS
6.1. Design of PSS
6.2. Q-Learning Algorithm on RSC
| Algorithm 1 Q-learning-Based Adaptive Parameter in Rotor-Side Algorithm |
| For each episode do Initialize Initialize For each step of episode do Choose a from s based on the current distribution Take action a, observe r, Update according to Equation (40) Update according to Equation (43) End for End for |
6.3. Q-Learning Algorithm for DC-Link Voltage Control on GSC
6.4. TD3 Method
| Algorithm 2 TD3 [53] |
| Initialize critic networks with random parameters Initialize target critic with same random parameters ; so Initialize actor network with random parameters Initialize target actor network with same random parameters So, for target networks Initialize replay buffer For t = 1 to T do For current state of observation select action with exploration noise . Here, is the stochastic noise from the noise model Execute action and observe reward and new state . Store the experience in (experience buffer) Sample a random mini batch of transitions from If is a terminal state, set the value function target else Update critics If mod then Update by deterministic policy gradient: Update target networks (smoothing): end if end for |
7. Results and Discussion
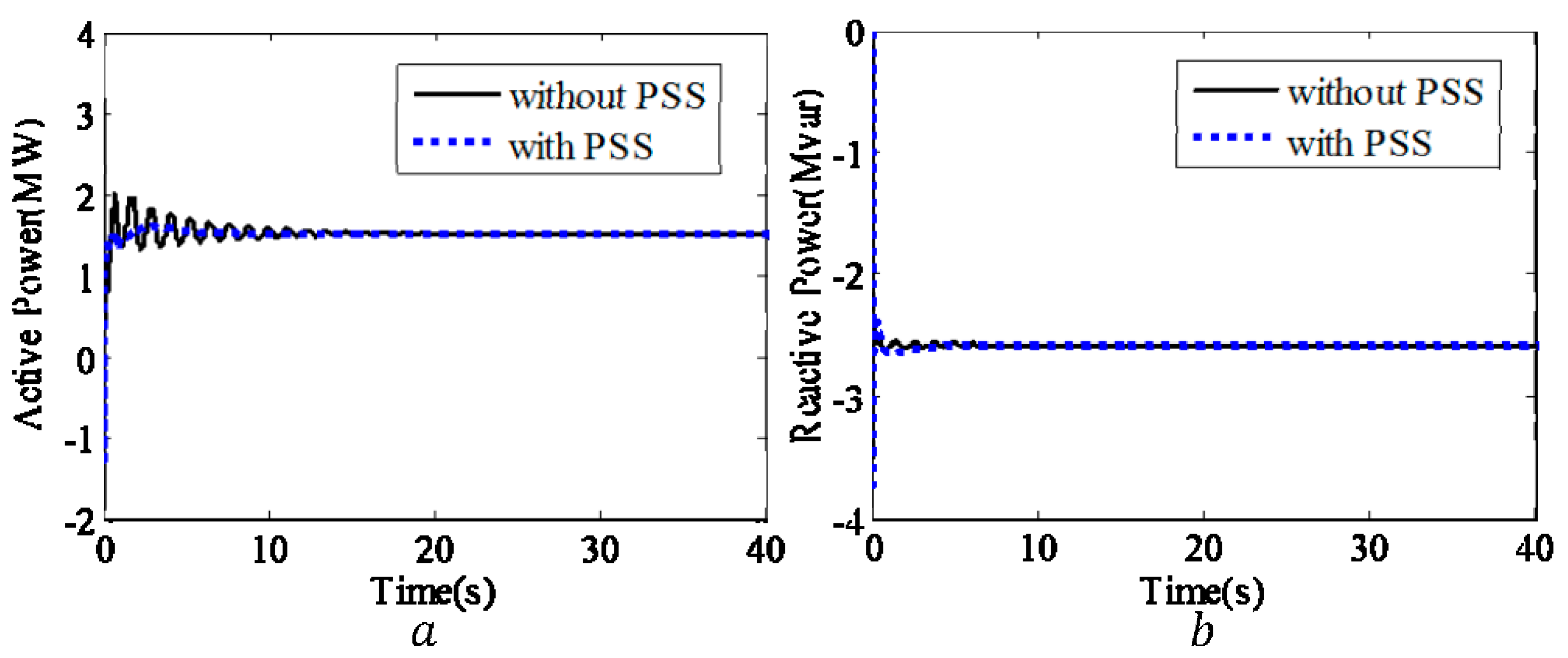
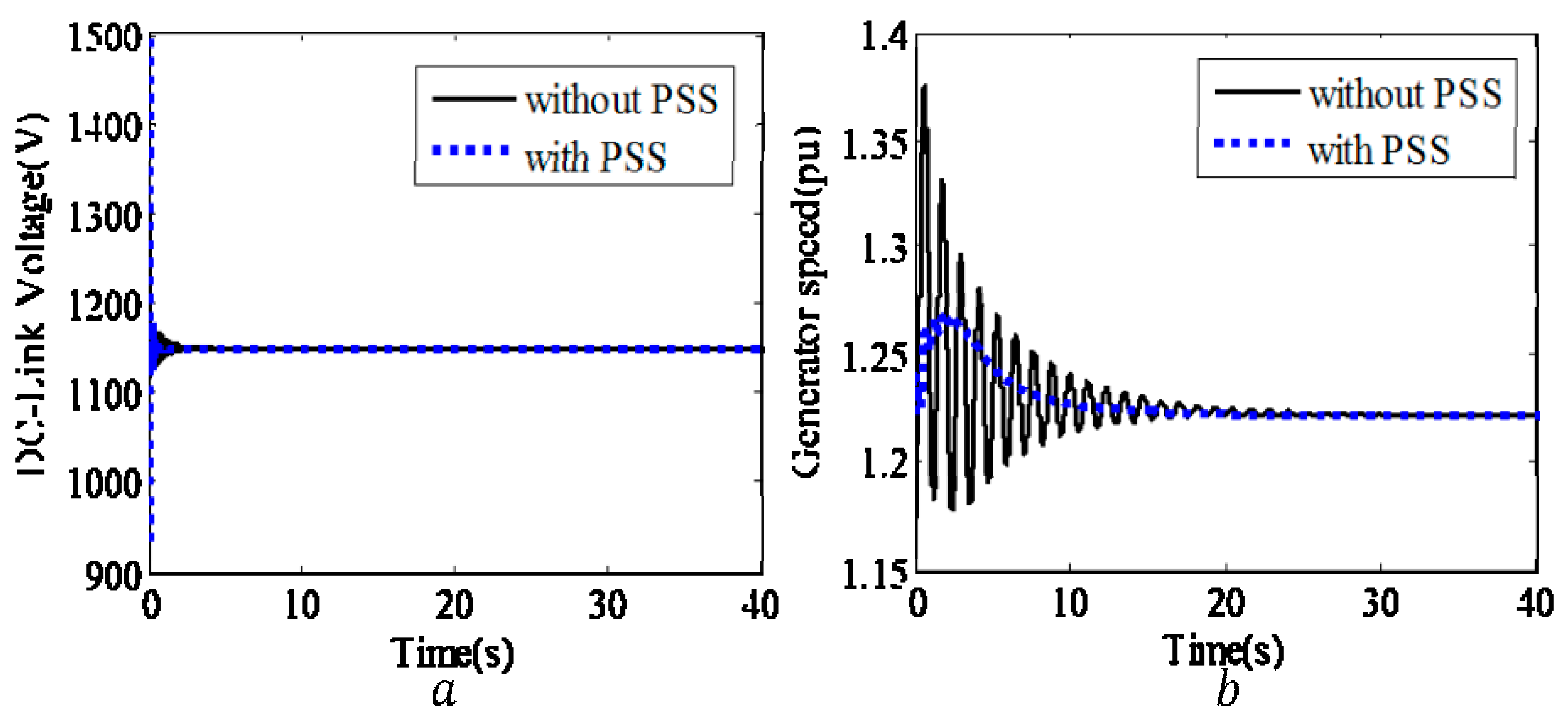
7.1. Simulation Results with the Newly Designed PSS
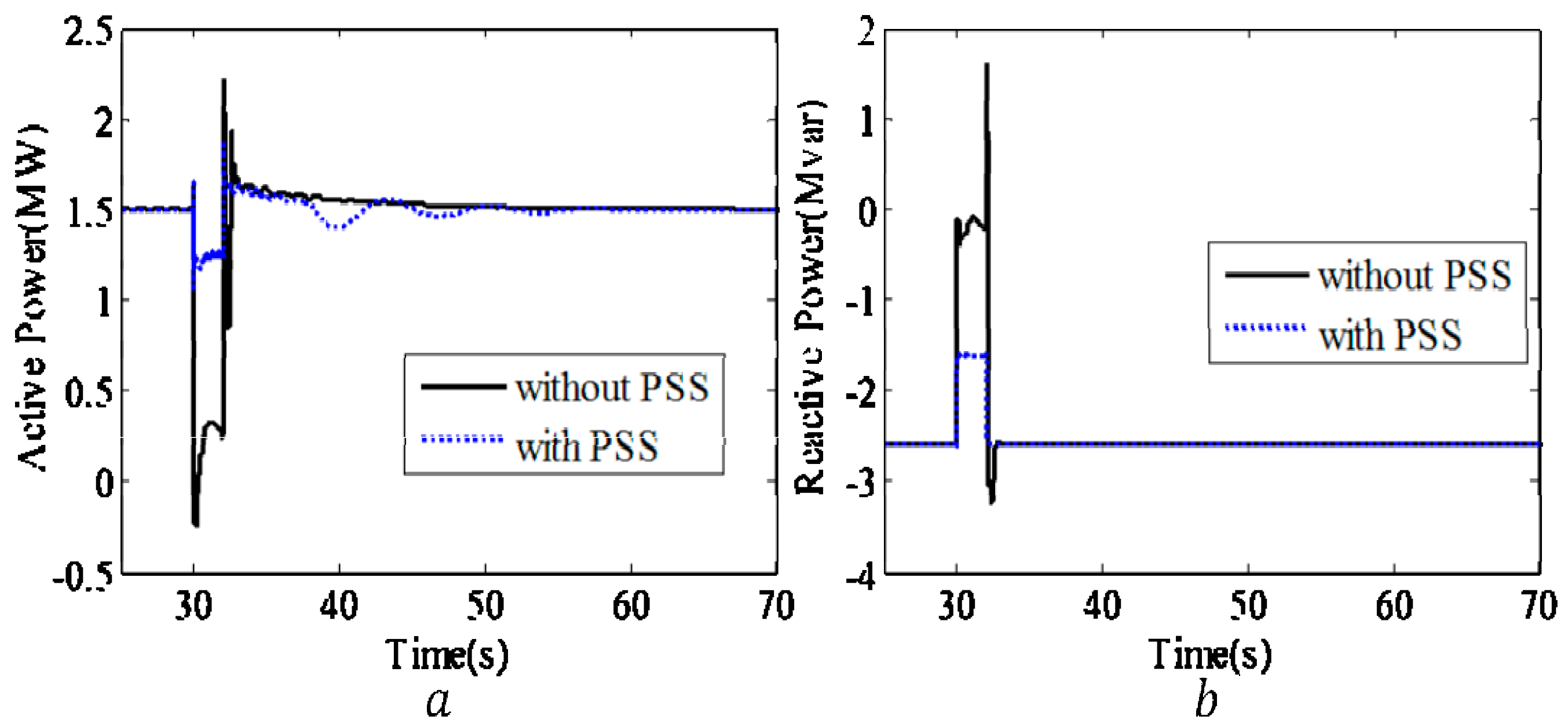
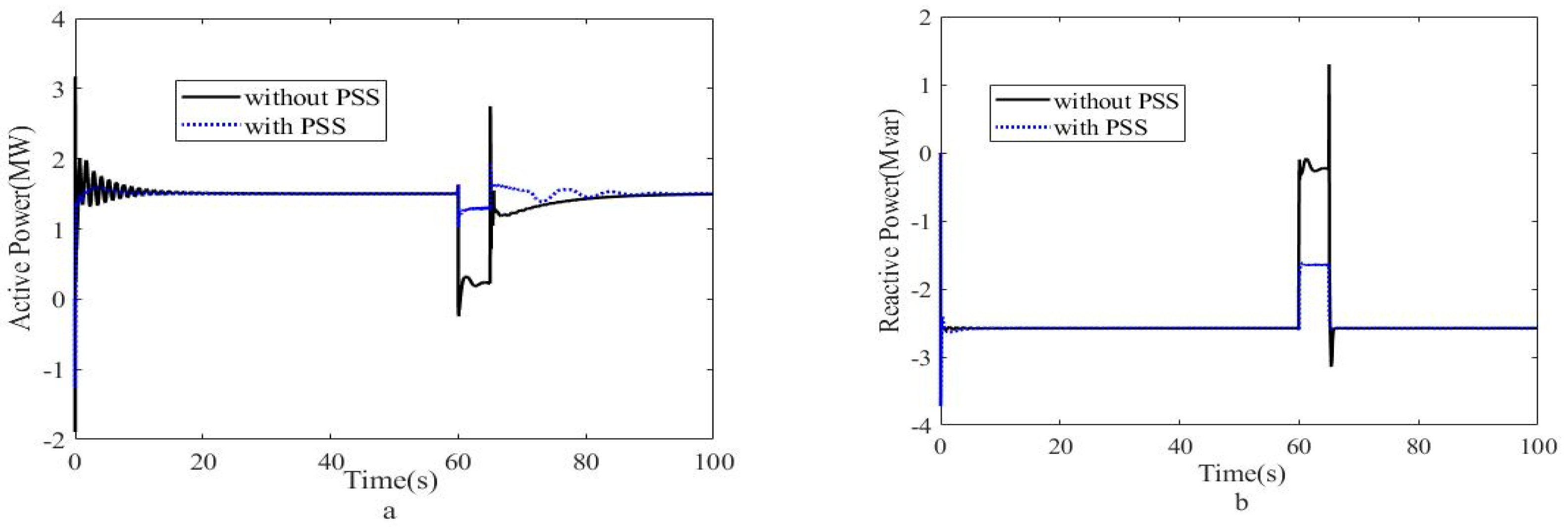
7.2. Fault Analysis with Transformation PSS
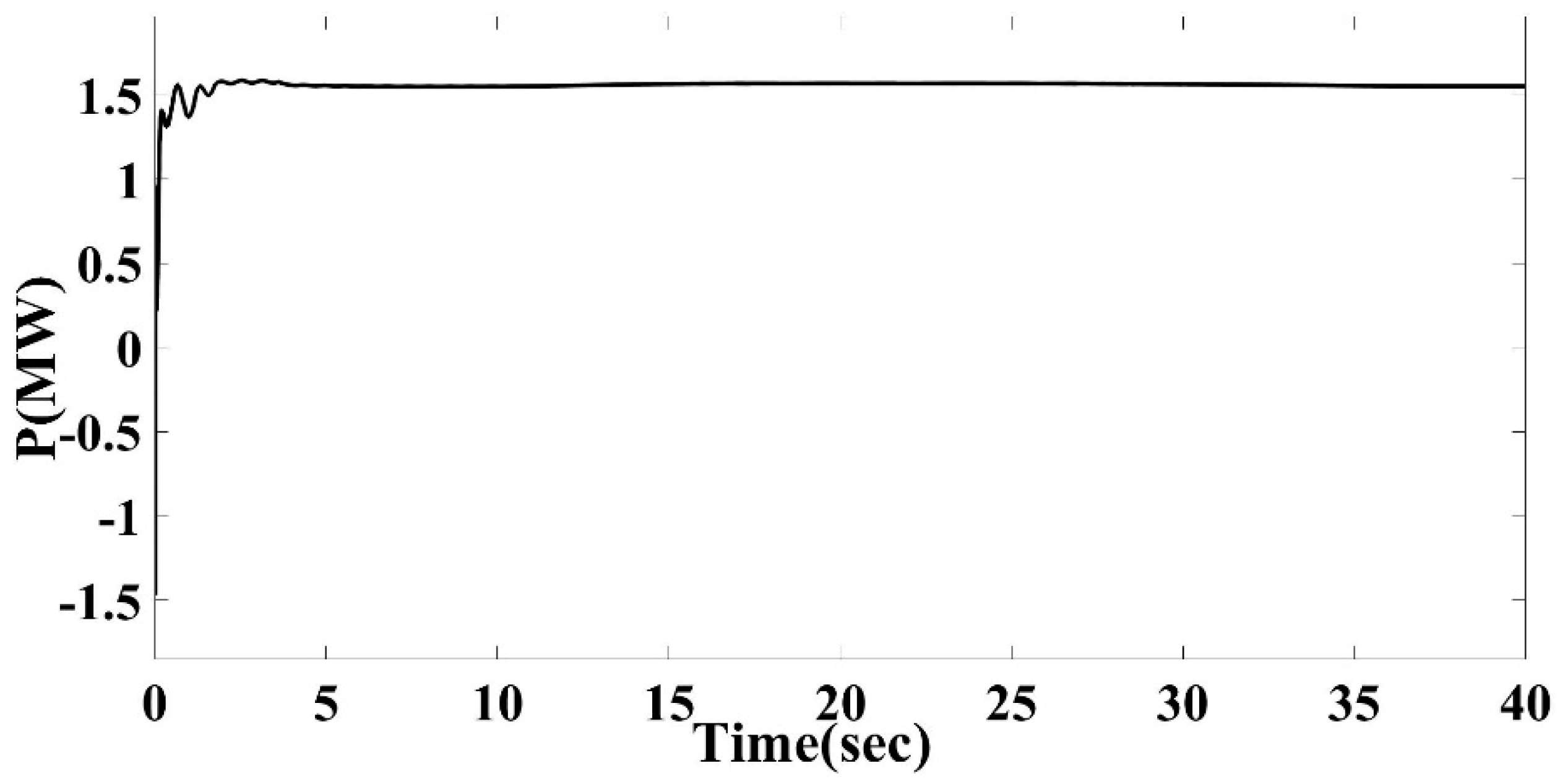
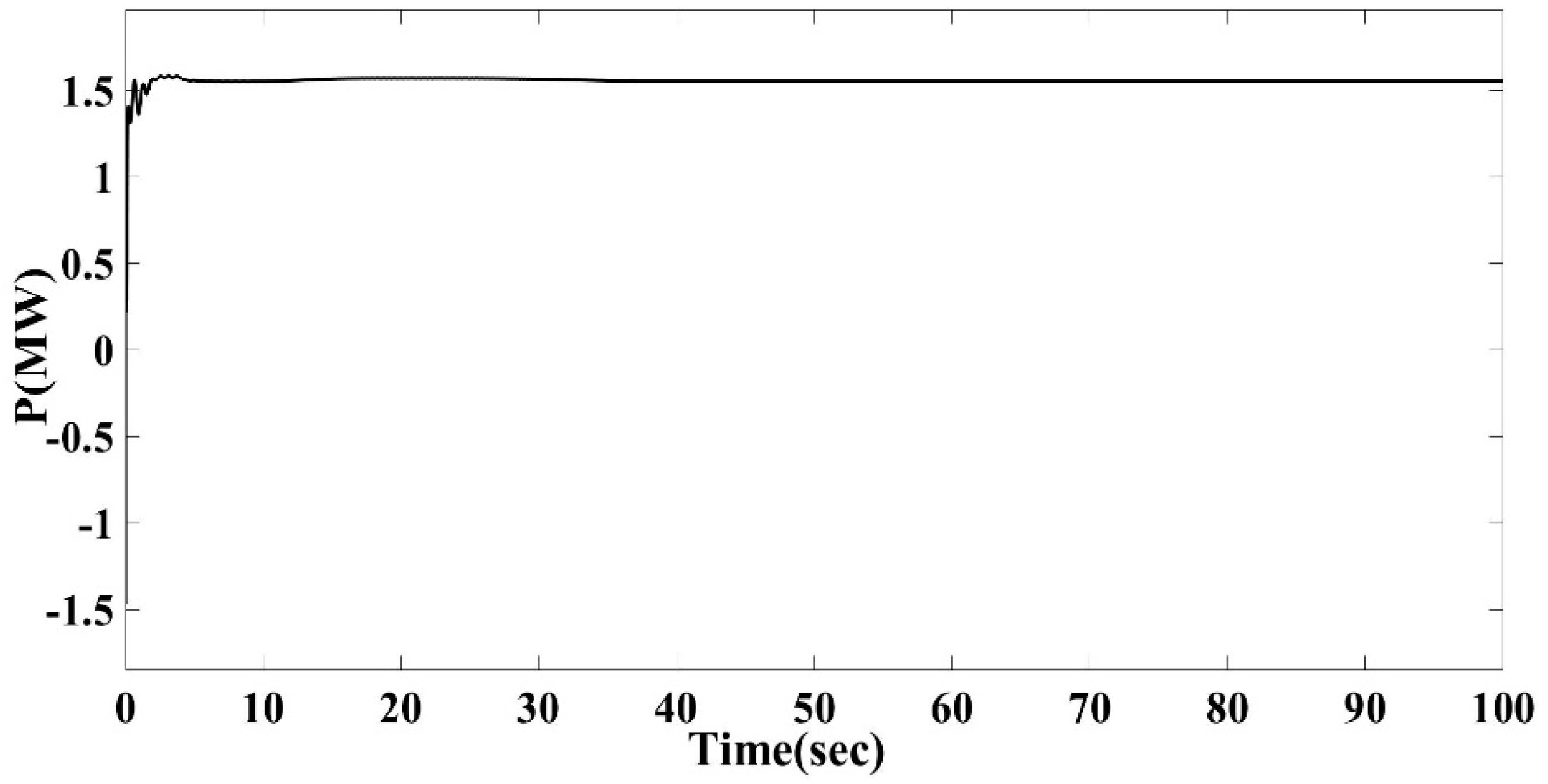
7.3. Results with Q-Learning Algorithm
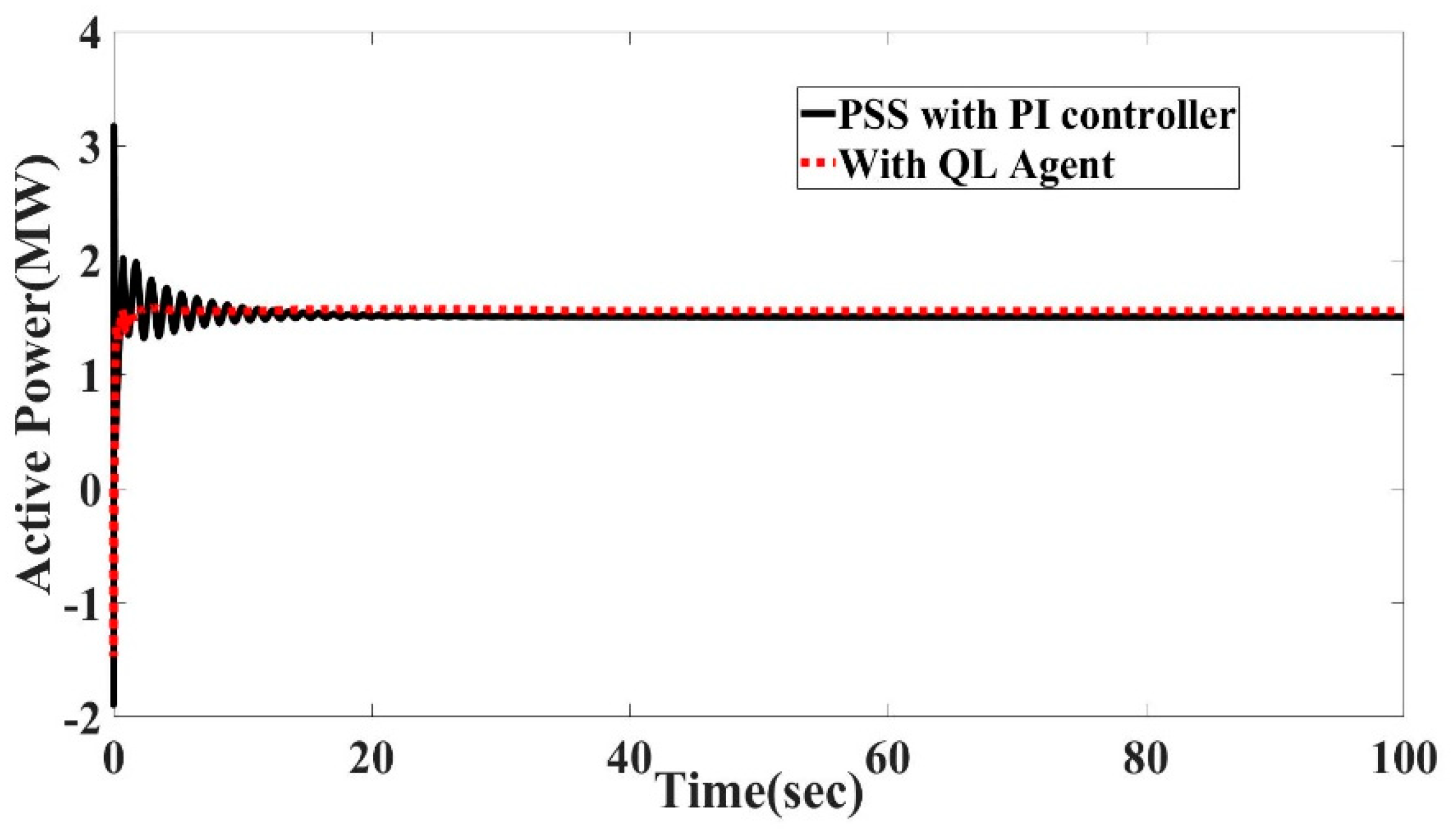
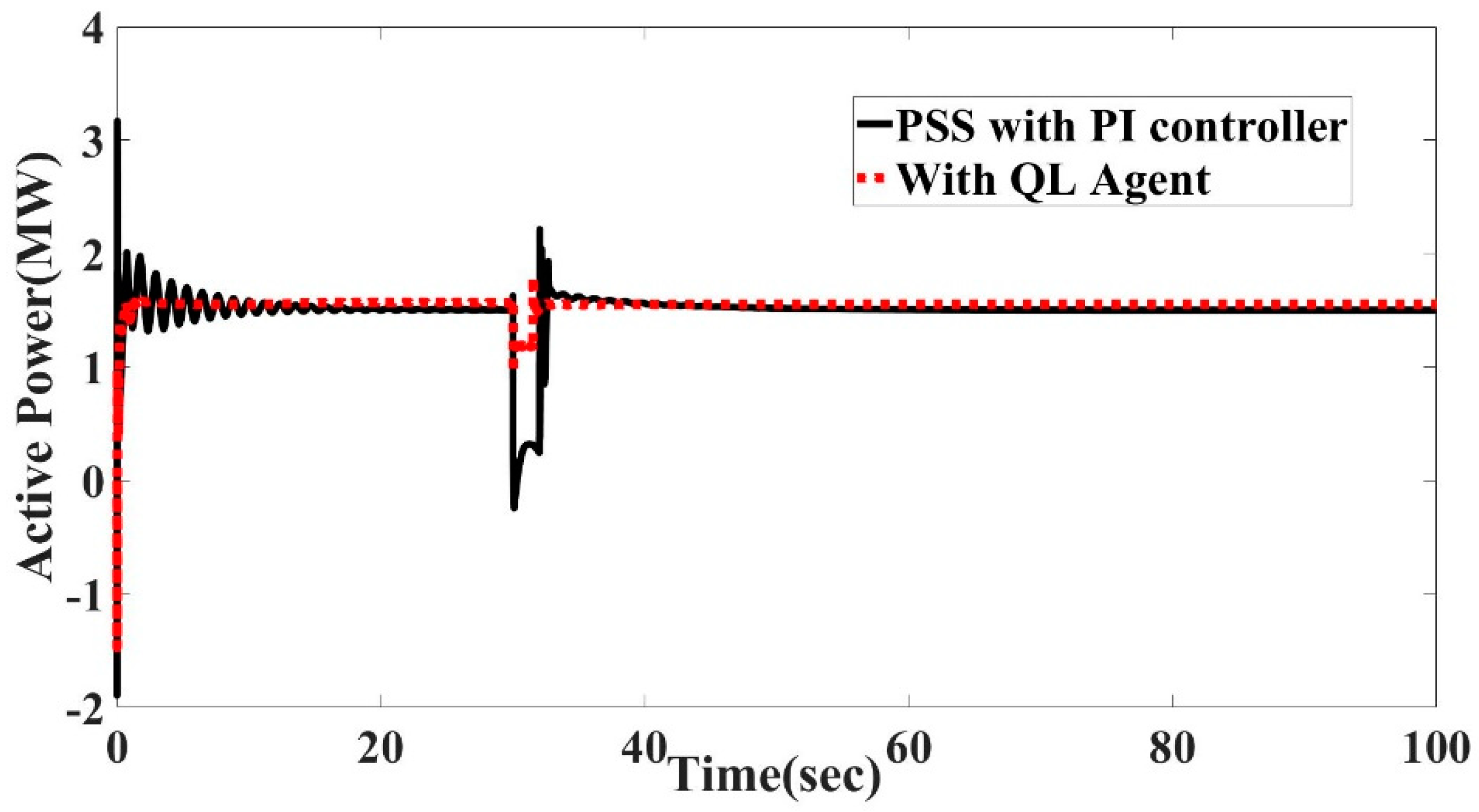
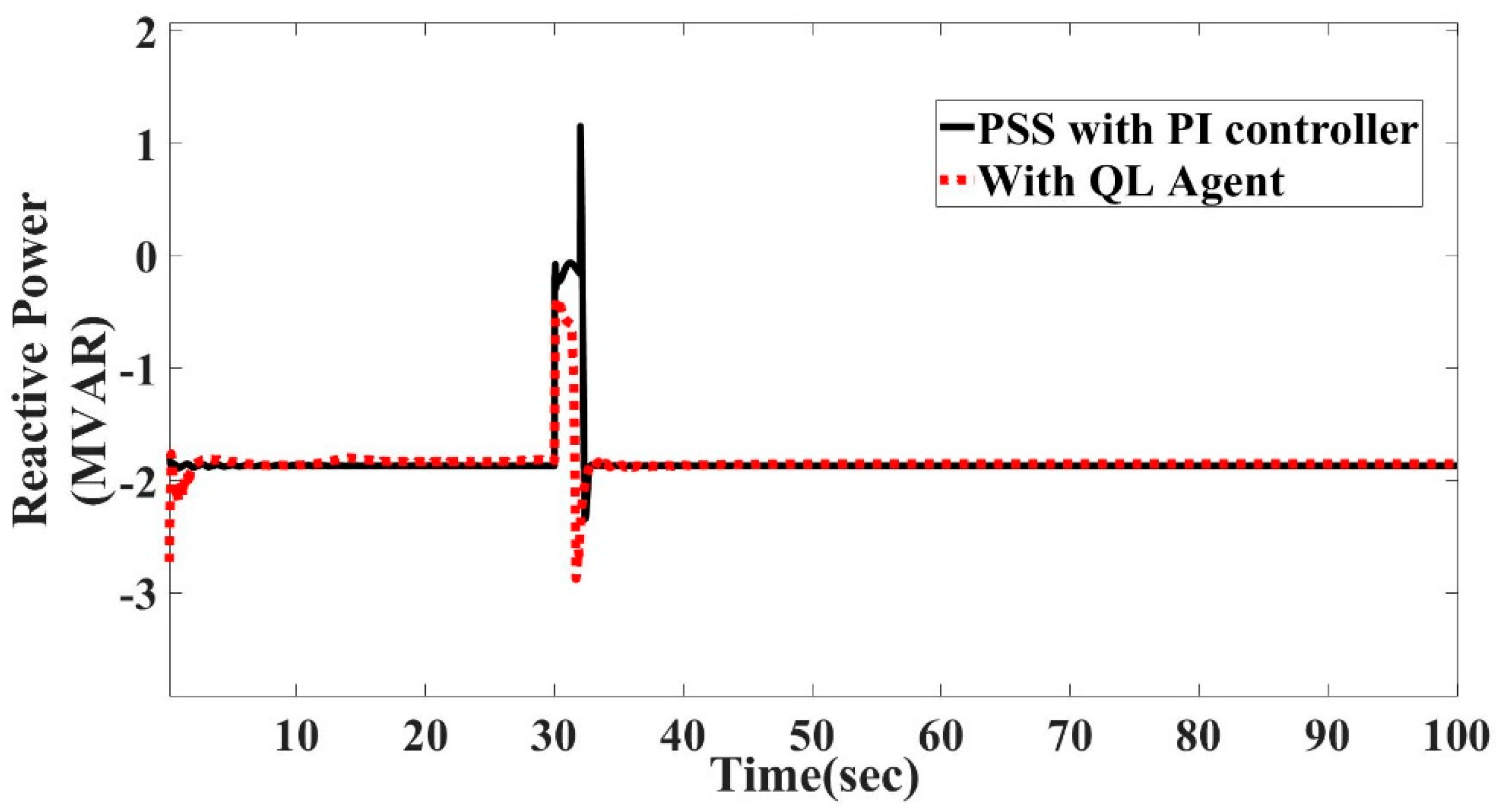
7.4. Comparing Q-Learning Algorithm with PI Controllers
7.5. Comparing Q-Learning Algorithm with PI Controllers under Fault Conditions
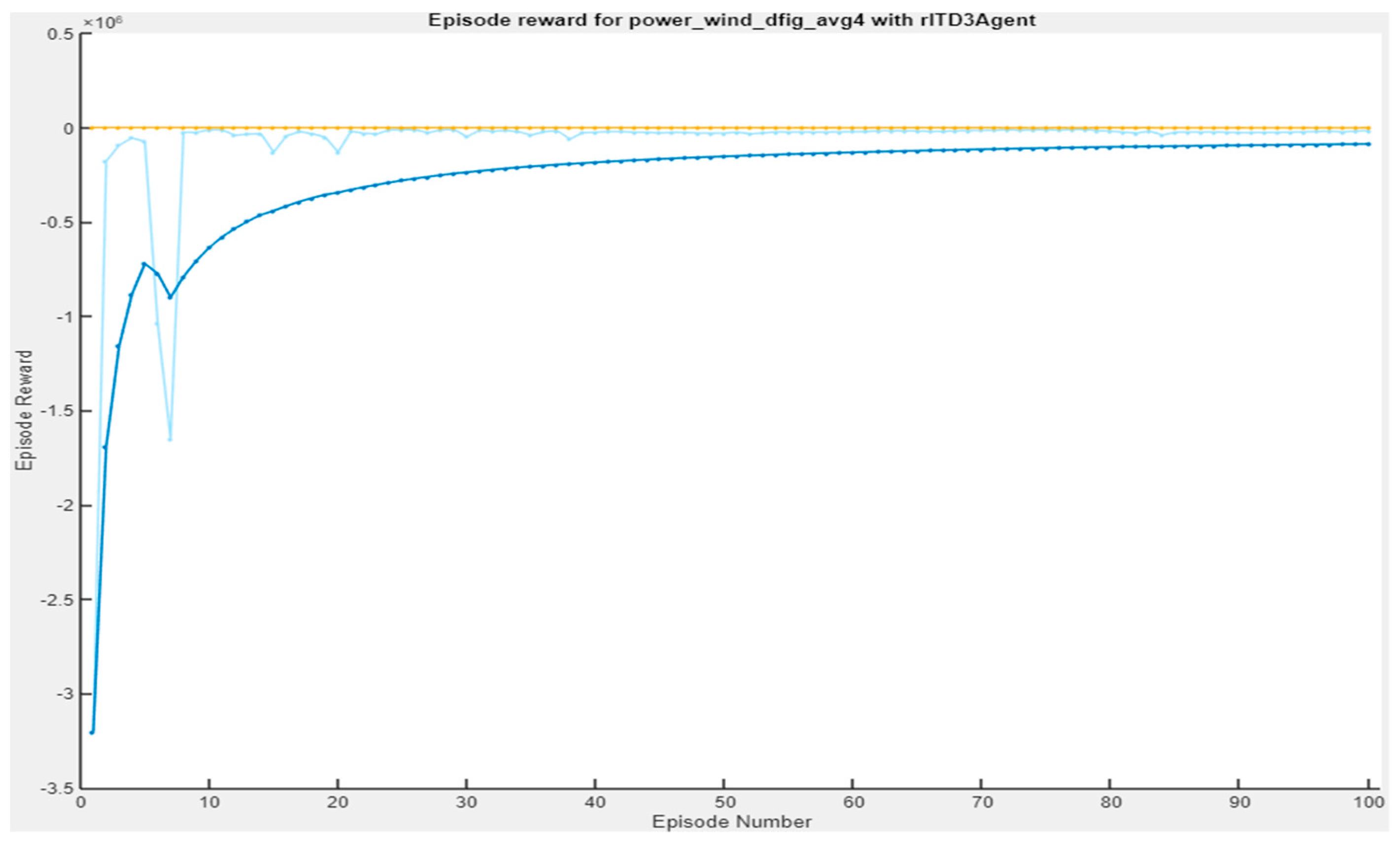
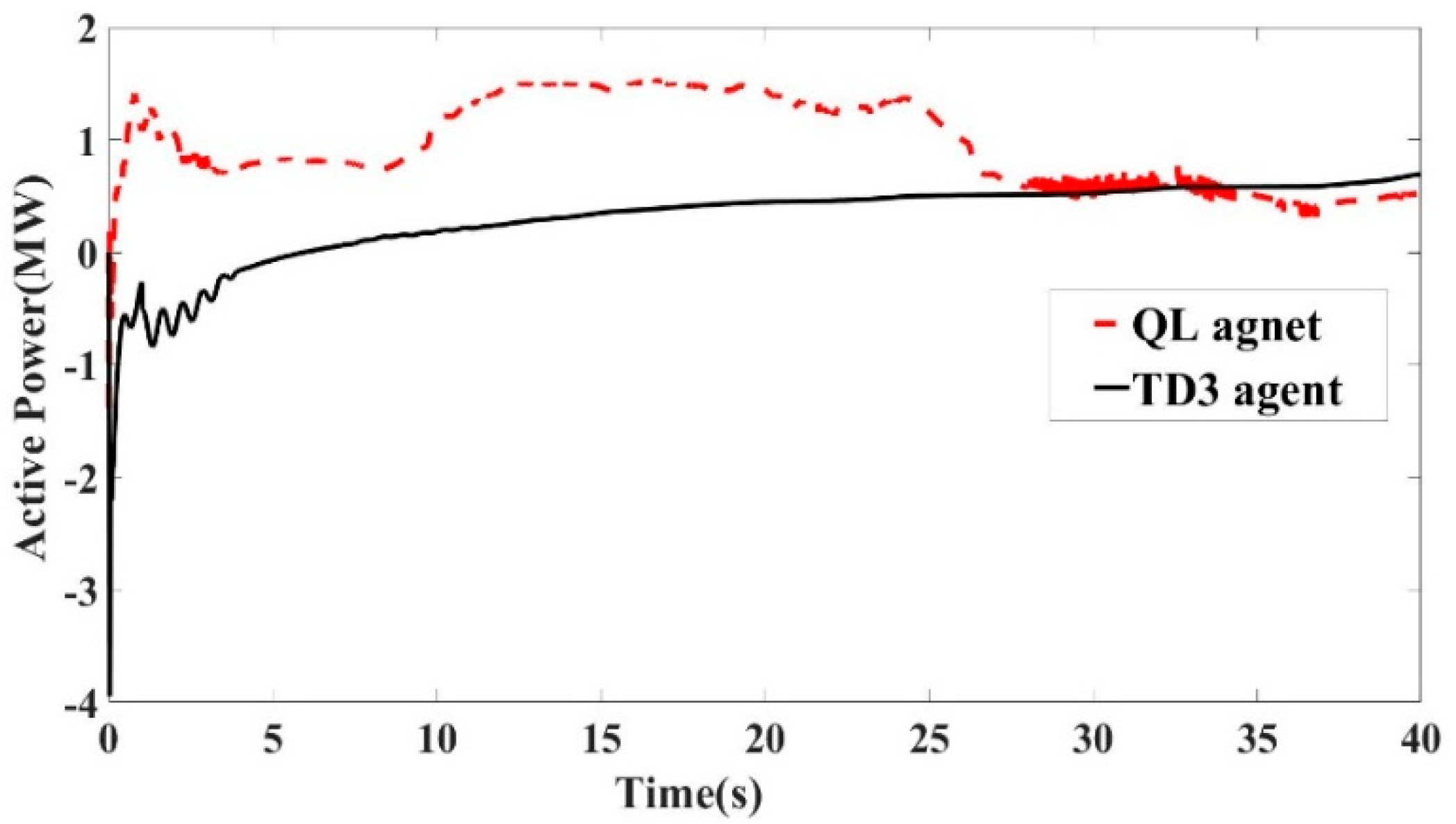
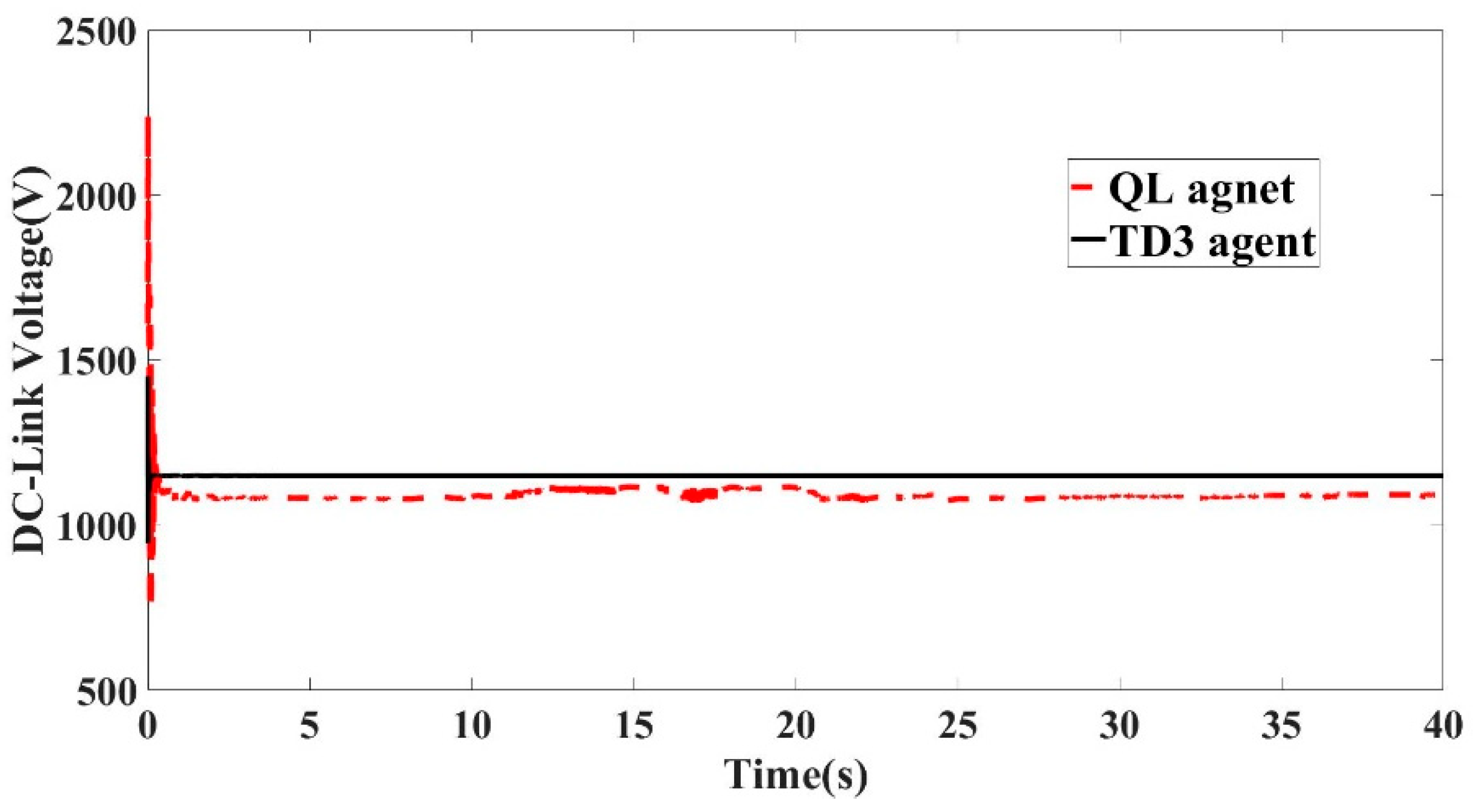
7.6. Comparing TD3 Agent with Q-Learning Algorithm
8. Limitation and Future Work
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Parameters for the System
| Base Quantities: | |
| Generator rated power | |
| Stator rated voltage | |
| Electrical base speed | |
| Base current | |
| Base impedance | |
| Base inductance | |
| Base flux | |
| Base active and reactive power | |
| DFIG Parameters: | |
| Synchronous speed | |
| Stator resistance | |
| Rotor resistance | |
| Stator inductance | |
| Rotor inductance | |
| Mutual inductance | |
| Generator inertia constant | |
| No. of pairs of poles | |
| Drivetrain data: | |
| Wind turbine inertia constant | |
| Shaft spring constant | |
| Shaft mutual damping | |
| rated wind speed | |
| Blade length | |
| Air density | |
| Turbine rated speed | |
| Tip speed ratio | |
| Maximum value of | |
| ; ; ; ; ; ; ; ; | |
| DC-Link: | |
| Controller data: | |
| Rotor-side converter controller: | |
| Active power loop | |
| Inner current controller loop | |
| Stator reactive power loop | |
| Inner current controller loop | |
| Grid-side converter controller: | |
| DC-link controller | |
| Inner current controller loop | |
| Grid-side reactive power controller | |
| Inner current controller loop | |
| PLL: | |
| 00 | |
| Reference values: | |
| Reactive power reference values | |
| PSS with voltage as input: | |
| ; | |
| PSS with frequency as input (transformation technique): | |
| ; | |
| ; and . | |
| Pitch controller: | |
| ; ; ; | |
References
- Ellis, A.; Muljadi, E. Wind Power Plant Representation in Large-Scale Power Flow Simulations in WECC. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Zobaa, A.F.; Bansal, R.C. Handbook of Renewable Energy Technology; World Scientific: Singapore, 2011; ISBN 978-981-4289-06-1. [Google Scholar]
- Nayar, C.V.; Islam, S.M.; Dehbonei, H.; Tan, K.; Sharma, H. Chapter 1—Power Electronics for Renewable Energy Sources. In Alternative Energy in Power Electronics; Rashid, M.H., Ed.; Butterworth-Heinemann: Oxford, UK, 2011; pp. 1–79. [Google Scholar]
- Zhou, F.; Liu, J. A Robust Control Strategy Research on PMSG-Based WECS Considering the Uncertainties. IEEE Access 2018, 6, 51951–51963. [Google Scholar] [CrossRef]
- Shang, L.; Hu, J. Sliding-Mode-Based Direct Power Control of Grid-Connected Wind-Turbine-Driven Doubly Fed Induction Generators under Unbalanced Grid Voltage Conditions. IEEE Trans. Energy Convers. 2012, 27, 362–373. [Google Scholar] [CrossRef]
- Zeng, H.; Zhu, Y.; Liu, J. Verification of DFIG and PMSG Wind Turbines’ LVRT Characteristics through Field Testing. In Proceedings of the 2012 IEEE International Conference on Power System Technology (POWERCON), Auckland, New Zealand, 30 October–2 November 2012; pp. 1–6. [Google Scholar]
- Qiao, W. Dynamic Modeling and Control of Doubly Fed Induction Generators Driven by Wind Turbines. In Proceedings of the 2009 IEEE/PES Power Systems Conference and Exposition, Seattle, WA, USA, 15–18 March 2009; pp. 1–8. [Google Scholar]
- Bevrani, H.; Watanabe, M.; Mitani, Y. Power System Monitoring and Control; Wiley: Hoboken, NJ, USA, 2014; ISBN 978-1-118-85247-7. [Google Scholar]
- Vassell, G.S. Northeast Blackout of 1965. IEEE Power Eng. Rev. 1991, 11, 4. [Google Scholar] [CrossRef]
- Dehghani, M.; Han, W.; Karimipour, H. Coordinated Fuzzy Controller for Dynamic Stability Improvement in Multi-Machine Power System. In Proceedings of the 2018 IEEE International Conference on Smart Energy Grid Engineering (SEGE), Oshawa, ON, Canada, 12–15 August 2018; pp. 165–170. [Google Scholar]
- Anaya-Lara, O. Power System Stabiliser for a Generic DFIG-Based Wind Turbine Controller. In Proceedings of the 8th IEE International Conference on AC and DC Power Transmission (ACDC 2006), London, UK, 28–31 March 2006; Volume 2006, pp. 145–149. [Google Scholar]
- Hughes, F.M.; Anaya-Lara, O.; Jenkins, N.; Strbac, G. Control of DFIG-Based Wind Generation for Power Network Support. IEEE Trans. Power Syst. 2005, 20, 1958–1966. [Google Scholar] [CrossRef]
- Hughes, F.M.; Anaya-Lara, O.; Jenkins, N.; Strbac, G. A Power System Stabilizer for DFIG-Based Wind Generation. IEEE Trans. Power Syst. 2006, 21, 763–772. [Google Scholar] [CrossRef]
- Hughes, F.M.; Anaya-Lara, O.; Ramtharan, G.; Jenkins, N.; Strbac, G. Influence of Tower Shadow and Wind Turbulence on the Performance of Power System Stabilizers for DFIG-Based Wind Farms. IEEE Trans. Energy Convers. 2008, 23, 519–528. [Google Scholar] [CrossRef]
- Mishra, Y.; Mishra, S.; Li, F.; Dong, Z.Y.; Bansal, R.C. Small-Signal Stability Analysis of a DFIG-Based Wind Power System under Different Modes of Operation. IEEE Trans. Energy Convers. 2009, 24, 972–982. [Google Scholar] [CrossRef]
- Mishra, Y.; Mishra, S.; Tripathy, M.; Senroy, N.; Dong, Z.Y. Improving Stability of a DFIG-Based Wind Power System With Tuned Damping Controller. IEEE Trans. Energy Convers. 2009, 24, 650–660. [Google Scholar] [CrossRef]
- Surinkaew, T.; Ngamroo, I. Coordinated Robust Control of DFIG Wind Turbine and PSS for Stabilization of Power Oscillations Considering System Uncertainties. IEEE Trans. Sustain. Energy 2014, 5, 823–833. [Google Scholar] [CrossRef]
- Iswadi, H.R.; Morrow, D.J.; Best, R.J. Small Signal Stability Performance of Power System during High Penetration of Wind Generation. In Proceedings of the 2014 49th International Universities Power Engineering Conference (UPEC), Cluj-Napoca, Romania, 2–5 September 2014; pp. 1–6. [Google Scholar]
- Mendonca, A.; Lopes, J.A.P. Simultaneous Tuning of Power System Stabilizers Installed in DFIG-Based Wind Generation. In Proceedings of the 2007 IEEE Lausanne Power Tech, Lausanne, Switzerland, 1–5 July 2007; pp. 219–224. [Google Scholar]
- Elkington, K.; Ghandhari, M.; Söder, L. Using Power System Stabilisers in Doubly Fed Induction Generators. In Proceedings of the Australasian Universities Power Engineering Conference, Sydney, NSW, Australia, 14–17 December 2008; p. 6. [Google Scholar]
- Ke, D.P.; Chung, C.Y.; Xue, Y. Controller Design for DFIG-Based Wind Power Generation to Damp Interarea Oscillation. In Proceedings of the 2010 5th International Conference on Critical Infrastructure (CRIS), Beijing, China, 20–22 September 2010; pp. 1–6. [Google Scholar]
- Gong, B.; Xu, D.; Wu, B. Network Damping Capability of DFIG-Based Wind Farm. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 4083–4090. [Google Scholar]
- Zhang, Y.; Chen, G.P.; Malik, O.P.; Hope, G.S. An Artificial Neural Network Based Adaptive Power System Stabilizer. IEEE Trans. Energy Convers. 1993, 8, 71–77. [Google Scholar] [CrossRef]
- Kahouli, O.; Alshammari, B.; Dhouib, B. Application of ANN and ANFIS Techniques for PSS Tuning in a Multimachine Power System. In Proceedings of the 2019 16th International Multi-Conference on Systems, Signals & Devices (SSD), Istanbul, Turkey, 21–24 March 2019; pp. 435–440. [Google Scholar]
- Hariri, A.; Malik, O.P. A Fuzzy Logic Based Power System Stabilizer with Learning Ability. IEEE Trans. Energy Convers. 1996, 11, 721–727. [Google Scholar] [CrossRef]
- Chaturvedi, D.K.; Malik, O.P. Neurofuzzy Power System Stabilizer. IEEE Trans. Energy Convers. 2008, 23, 887–894. [Google Scholar] [CrossRef]
- Boonprasert, U.; Theera-Umpon, N.; Rakpenthai, C. Support Vector Regression Based Adaptive Power System Stabilizer. In Proceedings of the 2003 International Symposium on Circuits and Systems, (ISCAS), Bangkok, Thailand, 25–28 May 2003; Volume 3, pp. III-371–III-374. [Google Scholar]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction, 2nd ed.; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Ernst, D.; Glavic, M.; Wehenkel, L. Power Systems Stability Control: Reinforcement Learning Framework. IEEE Trans. Power Syst. 2004, 19, 427–435. [Google Scholar] [CrossRef] [Green Version]
- Hadidi, R.; Jeyasurya, B. Reinforcement Learning Based Real-Time Wide-Area Stabilizing Control Agents to Enhance Power System Stability. IEEE Trans. Smart Grid 2013, 4, 489–497. [Google Scholar] [CrossRef]
- Hadidi, R.; Jeyasurya, B. Reinforcement Learning Approach for Controlling Power System Stabilizers. Can. J. Electr. Comput. Eng. 2009, 34, 99–103. [Google Scholar] [CrossRef]
- Imthias Ahamed, T.P.; Nagendra Rao, P.S.; Sastry, P.S. A Reinforcement Learning Approach to Automatic Generation Control. Electr. Power Syst. Res. 2002, 63, 9–26. [Google Scholar] [CrossRef] [Green Version]
- Tao, Y.; Bin, Z. A Novel Self-Tuning CPS Controller Based on Q-Learning Method. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Vlachogiannis, J.G.; Hatziargyriou, N.D. Reinforcement Learning for Reactive Power Control. IEEE Trans. Power Syst. 2004, 19, 1317–1325. [Google Scholar] [CrossRef]
- Zhu, X.; Jin, T. Research of Control Strategy of Power System Stabilizer Based on Reinforcement Learning. In Proceedings of the 2020 IEEE 2nd International Conference on Circuits and Systems (ICCS), Chengdu, China, 10 December 2020; pp. 81–85. [Google Scholar]
- Zhang, G.; Hu, W.; Cao, D.; Huang, Q.; Yi, J.; Chen, Z.; Blaabjerg, F. Deep Reinforcement Learning-Based Approach for Proportional Resonance Power System Stabilizer to Prevent Ultra-Low-Frequency Oscillations. IEEE Trans. Smart Grid 2020, 11, 5260–5272. [Google Scholar] [CrossRef]
- Li, J.; Yu, T. Deep Reinforcement Learning Based Multi-Objective Integrated Automatic Generation Control for Multiple Continuous Power Disturbances. IEEE Access 2020, 8, 156839–156850. [Google Scholar] [CrossRef]
- Khalid, J.; Ramli, M.A.M.; Khan, M.S.; Hidayat, T. Efficient Load Frequency Control of Renewable Integrated Power System: A Twin Delayed DDPG-Based Deep Reinforcement Learning Approach. IEEE Access 2022, 10, 51561–51574. [Google Scholar] [CrossRef]
- Yan, Z.; Xu, Y. A Multi-Agent Deep Reinforcement Learning Method for Cooperative Load Frequency Control of a Multi-Area Power System. IEEE Trans. Power Syst. 2020, 35, 4599–4608. [Google Scholar] [CrossRef]
- Kosuru, R.; Chen, P.; Liu, S. A Reinforcement Learning Based Power System Stabilizer for a Grid Connected Wind Energy Conversion System. In Proceedings of the 2020 IEEE Electric Power and Energy Conference (EPEC), Edmonton, AB, Canada, 9 November 2020; pp. 1–5. [Google Scholar]
- Manwell, J.F.; Mcgowan, J.G.; Rogers, A.L. Wind Energy Explained, Theory, Design, and Applications; John Wiley & Sons Ltd.: Chichester, UK, 2009. [Google Scholar]
- Salman, S.K.; Teo, A.L.J.; Rida, I.M. The Effect of Shaft Modelling on the Assessment of Fault CCT and the Power Quality of a Wind Farm. In Proceedings of the Ninth International Conference on Harmonics and Quality of Power (Cat. No.00EX441), Orlando, FL, USA, 1–4 October 2000; Volume 3, pp. 994–998. [Google Scholar]
- Mei, F.; Pal, B.C. Modelling and Small-Signal Analysis of a Grid Connected Doubly-Fed Induction Generator. In Proceedings of the IEEE Power Engineering Society General Meeting, San Francisco, CA, USA, 16 June 2005; pp. 1503–1510. [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Ledesma, P.; Usaola, J. Doubly Fed Induction Generator Model for Transient Stability Analysis. IEEE Trans. Energy Convers. 2005, 20, 388–397. [Google Scholar] [CrossRef]
- Slootweg, J.G.; Polinder, H.; Kling, W.L. Representing Wind Turbine Electrical Generating Systems in Fundamental Frequency Simulations. IEEE Trans. Energy Convers. 2003, 18, 516–524. [Google Scholar] [CrossRef] [Green Version]
- Ong, C.-M. Dynamic Simulation of Electric Machinery: Using MATLAB/SIMULINK; Prentice Hall: Upper Saddle River, NJ, USA, 1998. [Google Scholar]
- Song, Z.; Xia, C.; Shi, T. Assessing Transient Response of DFIG Based Wind Turbines during Voltage Dips Regarding Main Flux Saturation and Rotor Deep-Bar Effect. Appl. Energy 2010, 87, 3283–3293. [Google Scholar] [CrossRef]
- Vittal, V.; Ayyanar, R. Grid Integration and Dynamic Impact of Wind Energy; Springer: New York, NY, USA, 2013. [Google Scholar]
- Wang, X. Investigation of Positive Feedback Anti-Islanding Scheme for Inverter-Based Distributed Generation. Ph.D. Thesis, University of Alberta, Edmonton, AB, Canada, June 2008. [Google Scholar]
- Kaelbling, L.P.; Littman, M.L.; Moore, A.W. Reinforcement learning: A survey. J. Artif. Intell. Res. 1996, 4, 237–285. [Google Scholar] [CrossRef] [Green Version]
- Watkins, C.J.C.H.; Dayan, P. Q-learning. Mach. Learn. 1992, 8, 279–292. [Google Scholar] [CrossRef]
- Fujimoto, S.; van Hoof, H.; Meger, D. Addressing function approximation error in actor critic methods. arXiv 2018, arXiv:1802.09477. [Google Scholar]
- Yu, T.; Zhen, W.-G. A Reinforcement Learning Approach to Power System Stabilizer. In Proceedings of the 2009 IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–5. [Google Scholar]
- Varma, R.K.; Siavashi, E.M. Enhancement of Solar Farm Connectivity with Smart PV Inverter PV-STATCOM. IEEE Trans. Sustain. Energy 2019, 10, 1161–1171. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State Variables | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kosuru, R.; Liu, S.; Shi, W. Deep Reinforcement Learning for Stability Enhancement of a Variable Wind Speed DFIG System. Actuators 2022, 11, 203. https://doi.org/10.3390/act11070203
Kosuru R, Liu S, Shi W. Deep Reinforcement Learning for Stability Enhancement of a Variable Wind Speed DFIG System. Actuators. 2022; 11(7):203. https://doi.org/10.3390/act11070203
Chicago/Turabian StyleKosuru, Rahul, Shichao Liu, and Wei Shi. 2022. "Deep Reinforcement Learning for Stability Enhancement of a Variable Wind Speed DFIG System" Actuators 11, no. 7: 203. https://doi.org/10.3390/act11070203
APA StyleKosuru, R., Liu, S., & Shi, W. (2022). Deep Reinforcement Learning for Stability Enhancement of a Variable Wind Speed DFIG System. Actuators, 11(7), 203. https://doi.org/10.3390/act11070203