
Wind Turbine Pitch Actuator Regulation for Efficient and Reliable Energy Conversion: A Fault-Tolerant Constrained Control Solution




Abstract
:1. Introduction
2. HAWT Operational Model and Preliminaries
2.1. HAWT Operational Model
2.2. Technical Preliminaries
3. Baseline NACC Design
- P1. All the closed-loop system states are bounded;
- P2. For , the constraint sets are not violated;
- P3. By the proper choice of the design parameters, the tracking error can be made arbitrarily small.
4. MNACC Design with Unknown Control Gain
5. MNACC Control with Arbitrary Initial Conditions
6. Fault-Tolerance Capability of MNACC
7. Feasibility Check and Design Algorithm
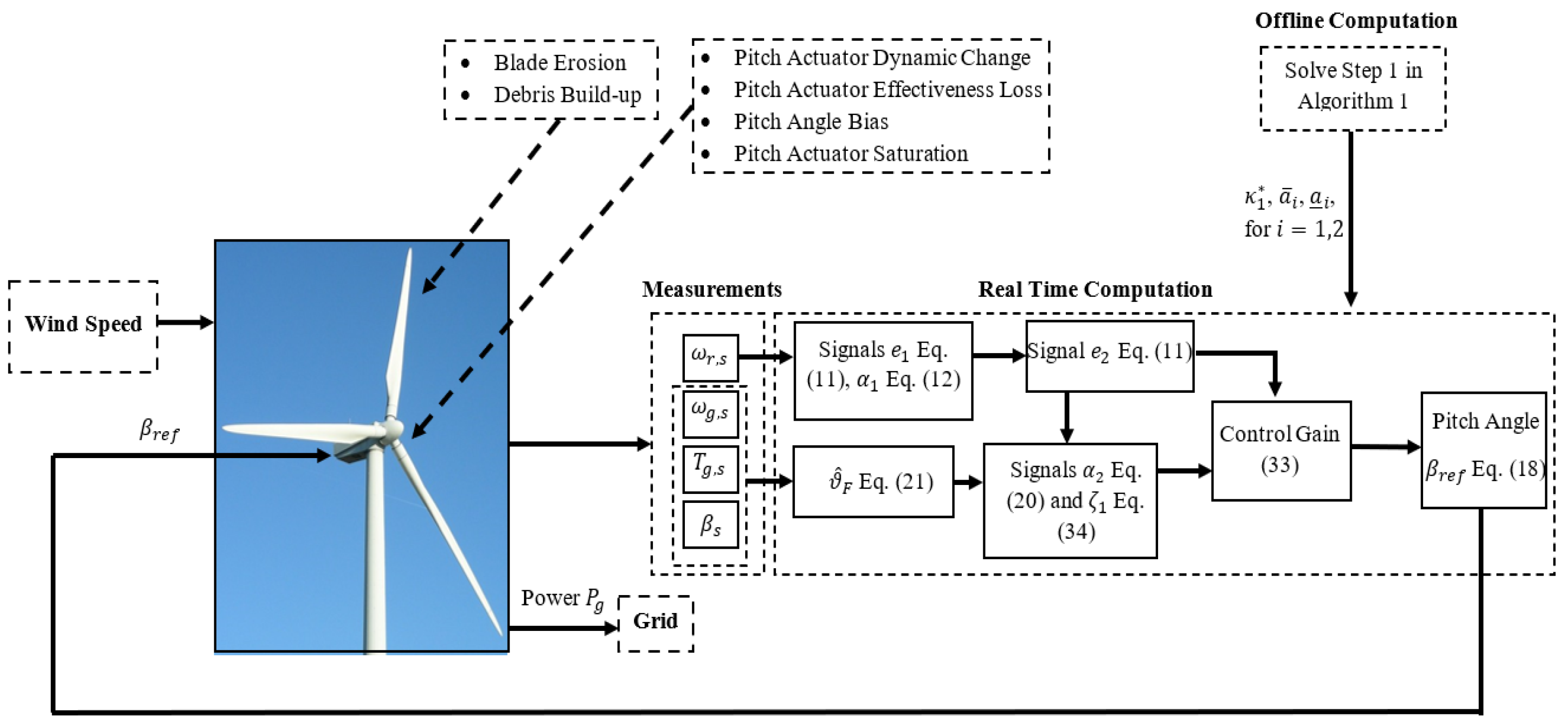
| Algorithm 1 Proposed controller design procedure |
| 1. Offline computation: |
| 1.1. For the given and , solve OP to obtain . Select , , and , for i = 1,2, in accordance with Remark 2. |
| 1.2. For the given initial condition, compute and , then select , and , for i = 1,2. |
| 2. Online computation: |
| 2.1. Integrate the virtual controls Equations (41) and (42), the adaptive laws Equations (21) and (34). |
| 2.2. Compute the control gain Equation (33) and then the control signal Equation (18). |
8. Simulations and Discussion
8.1. Control Parameters
8.2. Fault Model
8.3. Parameters of Measurement Errors
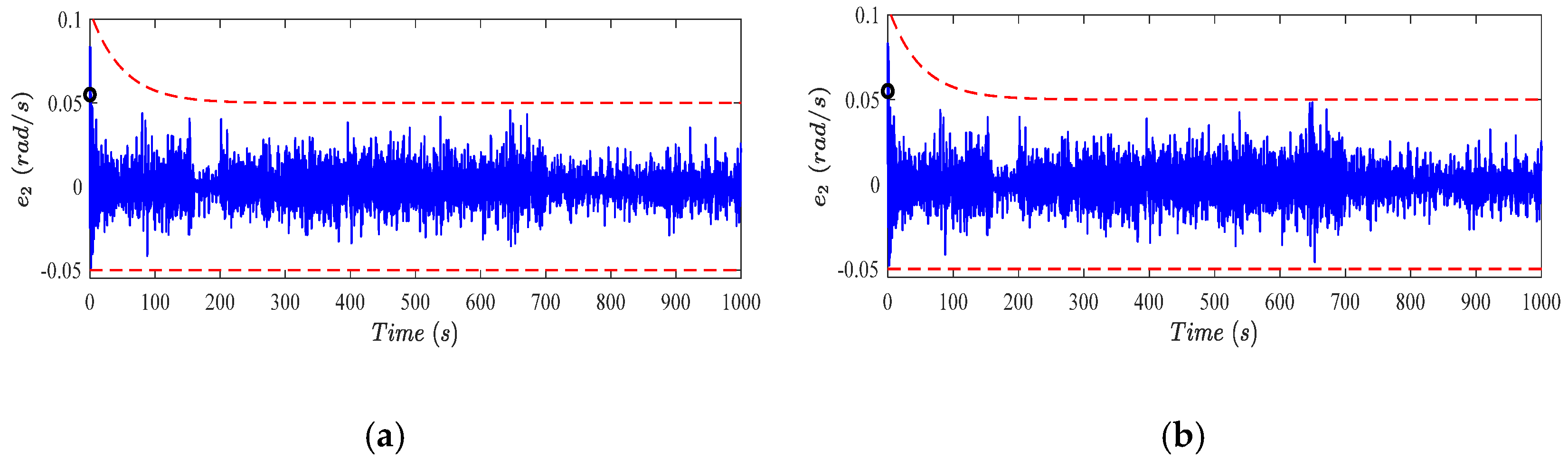
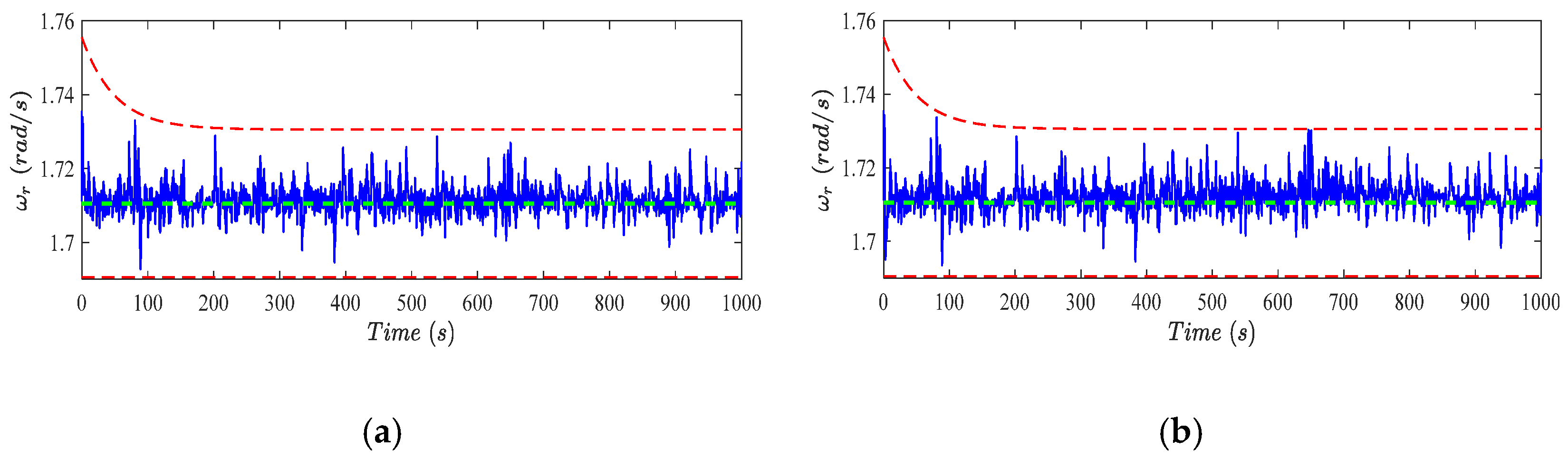
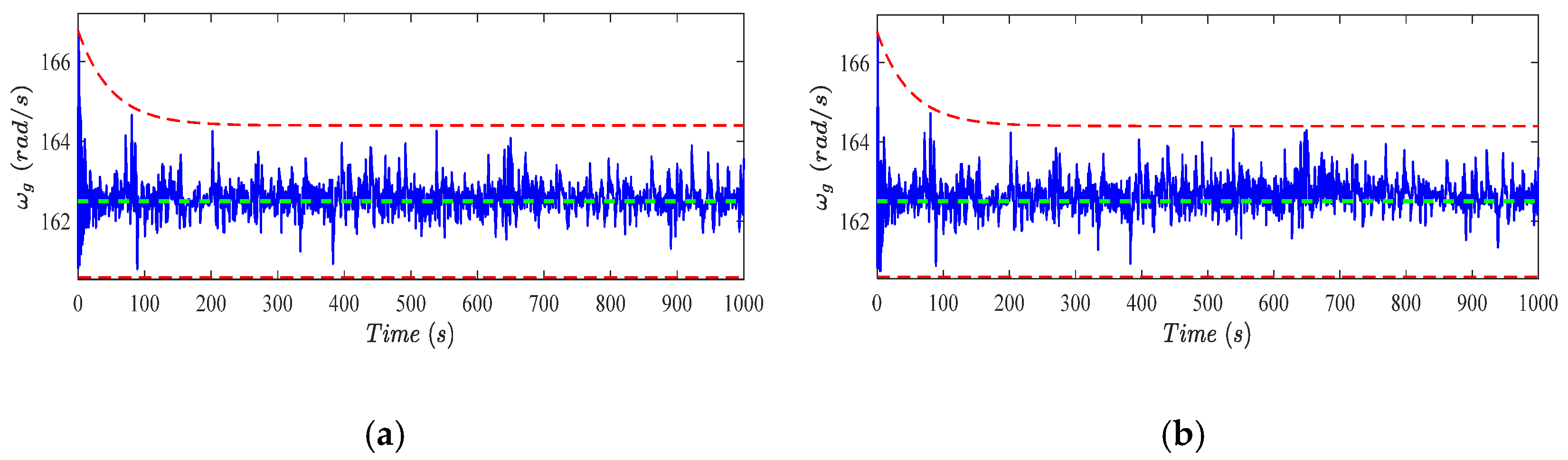
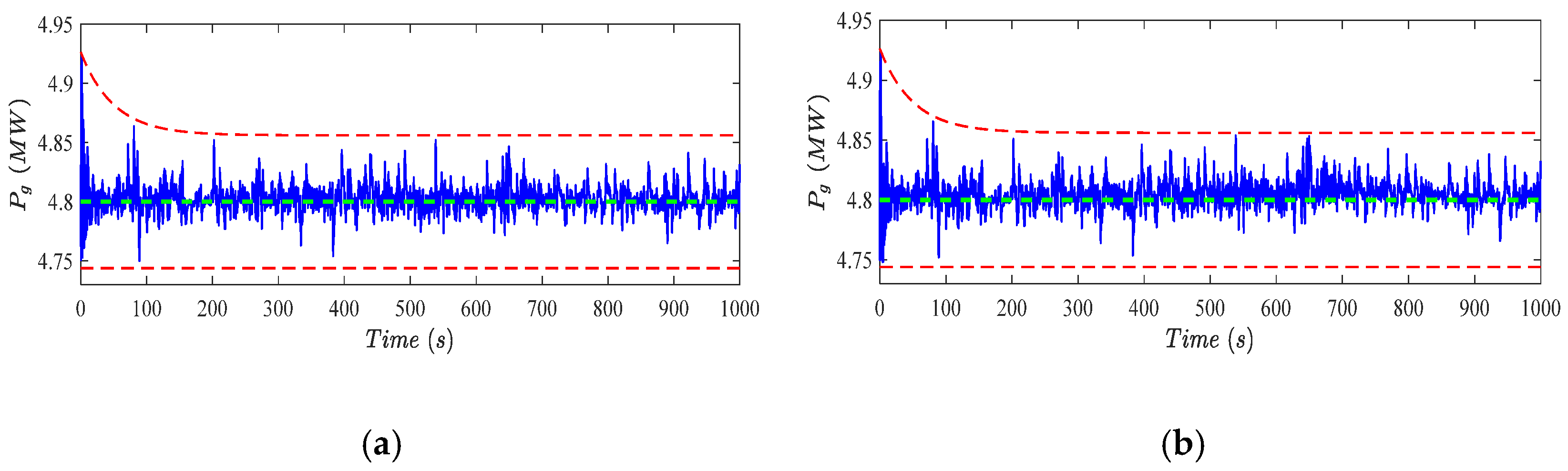
8.4. Simulation Results and Discussion
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Habibi, H.; Howard, I.; Simani, S. Reliability improvement of wind turbine power generation using model-based fault detection and fault tolerant control: A review. Renew. Energy 2019, 135, 877–896. [Google Scholar] [CrossRef]
- Gao, Z.; Liu, X. An overview on fault diagnosis, prognosis and resilient control for wind turbine systems. Processes 2021, 9, 300. [Google Scholar] [CrossRef]
- Yang, S.; Wang, R.; Zhou, J.; Chen, B. Intermediate-Variable-Based Distributed Fusion Estimation for Wind Turbine Systems. Actuators 2022, 11, 15. [Google Scholar] [CrossRef]
- Mahdizadeh, A.; Schmid, R.; Oetomo, D. LIDAR-Assisted Exact Output Regulation for Load Mitigation in Wind Turbines. IEEE Trans. Control Syst. Technol. 2020, 29, 1102–1116. [Google Scholar] [CrossRef]
- Lan, J.; Patton, R.J.; Zhu, X. Fault-tolerant wind turbine pitch control using adaptive sliding mode estimation. Renew. Energy 2018, 116, 219–231. [Google Scholar] [CrossRef]
- Sloth, C.; Esbensen, T.; Stoustrup, J. Robust and fault-tolerant linear parameter-varying control of wind turbines. Mechatronics 2011, 21, 645–659. [Google Scholar] [CrossRef] [Green Version]
- Tiwari, R.; Babu, N.R. Recent developments of control strategies for wind energy conversion system. Rene. Sustain. Energy Rev. 2016, 66, 268–285. [Google Scholar] [CrossRef]
- Simani, S.; Farsoni, S.; Castaldi, P. Fault diagnosis of a wind turbine benchmark via identified fuzzy models. IEEE Trans. Ind. Electron. 2015, 62, 3775–3782. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.; Hong, H. Fuzzy gain-scheduled active fault-tolerant control of a wind turbine. J. Franklin Inst. 2014, 351, 3677–3706. [Google Scholar] [CrossRef]
- Ghanbarpour, K.; Bayat, F.; Jalilvand, A. Wind turbines sustainable power generation subject to sensor faults: Observer-based MPC approach. Int. Trans. Electr. Energy Syst. 2020, 30, e12174. [Google Scholar] [CrossRef]
- Kong, X.; Ma, L.; Liu, X.; Abdelbaky, M.A.; Wu, Q. Wind turbine control using nonlinear economic model predictive control over all operating regions. Energies 2020, 13, 184. [Google Scholar] [CrossRef] [Green Version]
- Petrović, V.; Jelavić, M.; Baotić, M. MPC framework for constrained wind turbine individual pitch control. WiEn 2021, 24, 54–68. [Google Scholar] [CrossRef]
- Khooban, M.H. An Optimal Non-Integer MPC-based Load Frequency Control for Modern AC Power Grids with V2G Technology. IEEE Trans. Energy Convers. 2020. [Google Scholar]
- Zhao, K.; Song, Y.; Chen, C.P.; Chen, L. Control of nonlinear systems under dynamic constraints: A unified barrier function-based approach. Autom 2020, 119, 109102. [Google Scholar] [CrossRef]
- Habibi, H.; Nohooji, H.R.; Howard, I.; Simani, S. Fault-Tolerant Neuro Adaptive Constrained Control of Wind Turbines for Power Regulation with Uncertain Wind Speed Variation. Energies 2019, 12, 4712. [Google Scholar] [CrossRef] [Green Version]
- Habibi, H.; Nohooji, H.R.; Howard, I. Adaptive PID Control of Wind Turbines for Power Regulation With Unknown Control Direction and Actuator Faults. IEEE Access 2018, 6, 37464–37479. [Google Scholar] [CrossRef]
- Song, D.; Yang, J.; Cai, Z.; Dong, M.; Su, M.; Wang, Y. Wind estimation with a non-standard extended Kalman filter and its application on maximum power extraction for variable speed wind turbines. Appl. Energy 2017, 190, 670–685. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.; Hong, H. Fault-tolerant cooperative control in an offshore wind farm using model-free and model-based fault detection and diagnosis approaches. Appl. Energy 2017, 201, 284–307. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.; Pillay, P.; Rakheja, S. Application of FMRAC to fault-tolerant cooperative control of a wind farm with decreased power generation due to blade erosion/debris buildup. Int. J. Adapt. Control Signal Process. 2018, 32, 628–645. [Google Scholar] [CrossRef]
- Liu, J.; Gao, Y.; Geng, S.; Wu, L. Nonlinear Control of Variable Speed Wind Turbines via Fuzzy Techniques. IEEE Access 2017, 5, 27–34. [Google Scholar] [CrossRef]
- Rahnavard, M.; Ayati, M.; Yazdi, M.R.H.; Mousavi, M. Finite time estimation of actuator faults, states, and aerodynamic load of a realistic wind turbine. Renew. Energy 2019, 130, 256–267. [Google Scholar] [CrossRef]
- Li, M.; Yu, D.; Chen, Z.; Xiahou, K.; Ji, T.; Wu, Q. A data-driven residual-based method for fault diagnosis and isolation in wind turbines. IEEE Trans. Sustain. Energy 2019, 10, 895–904. [Google Scholar] [CrossRef]
- Jafarnejadsani, H.; Pieper, J.; Ehlers, J. Adaptive control of a variable-speed variable-pitch wind turbine using radial-basis function neural network. IEEE Trans. Control Syst. Technol. 2013, 21, 2264–2272. [Google Scholar] [CrossRef]
- Habibi, H.; Howard, I.; Habibi, R. Bayesian Fault Probability Estimation: Application in Wind Turbine Drivetrain Sensor Fault Detection. Asian J. Control 2020, 22, 624–647. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.; Hong, H. Wind turbine fault diagnosis and fault-tolerant torque load control against actuator faults. IEEE Trans. Cont. Syst. Technol. 2015, 23, 1351–1372. [Google Scholar] [CrossRef]
- Zhao, K.; Song, Y.; Wen, C. Computationally inexpensive fault tolerant control of uncertain non-linear systems with non-smooth asymmetric input saturation and undetectable actuation failures. IET Control. Theory Appl. 2016, 10, 1866–1873. [Google Scholar] [CrossRef]
- Odgaard, P.F.; Stoustrup, J.; Kinnaert, M. Fault-tolerant control of wind turbines: A benchmark model. IEEE Trans. Contr. Syst. Technol. 2013, 21, 1168–1182. [Google Scholar] [CrossRef] [Green Version]
- Sarkar, S.; Fitzgerald, B.; Basu, B. Individual Blade Pitch Control of Floating Offshore Wind Turbines for Load Mitigation and Power Regulation. IEEE Trans. Control Syst. Technol. 2020, 29, 305–315. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S. Control of nonlinear systems with full state constraint using a barrier Lyapunov function. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC), Shanghai, China, 15–18 December 2009; pp. 8618–8623. [Google Scholar]
- Tang, Z.-L.; Ge, S.S.; Tee, K.P.; He, W. Robust adaptive neural tracking control for a class of perturbed uncertain nonlinear systems with state constraints. IEEE Trans. Syst. Man Cyb. Syst. 2016, 46, 1618–1629. [Google Scholar] [CrossRef]
- Leithead, W.E.; Dominguez, S. Wind turbine rotor acceleration: Identification using Gaussian regression. In Proceedings of the International Conference on Informatics in Control, Automation, Barcelona, Spain, 14–17 September 2005. [Google Scholar]
- Leithead, W.; Hardan, F.; Leith, D. Identification of aerodynamics and drive-train dynamics for a variable speed wind turbine. In Proceedings of the European Wind Energy Conference and Exhibition, Madrid, Spain, 16–19 June 2003. [Google Scholar]
- Rommel, D.; Di Maio, D.; Tinga, T. Calculating wind turbine component loads for improved life prediction. Renew. Energy 2020, 146, 223–241. [Google Scholar] [CrossRef]
- Wu, L.B.; Park, J.H.; Zhao, N.N. Robust Adaptive Fault-Tolerant Tracking Control for Nonaffine Stochastic Nonlinear Systems With Full-State Constraints. IEEE Trans. Cybern. 2019, 50, 3793–3805. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.J.; Tong, S. Barrier Lyapunov functions for Nussbaum gain adaptive control of full state constrained nonlinear systems. Autom 2017, 76, 143–152. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Z.; Chen, C.L.P. Adaptive Neural Control of Uncertain MIMO Nonlinear Systems With State and Input Constraints. IEEE Trans. Neural Net. Learn. Syst. 2017, 28, 1318–1330. [Google Scholar] [CrossRef] [PubMed]
- Jia, Z.J.; Song, Y.D. Barrier Function-Based Neural Adaptive Control With Locally Weighted Learning and Finite Neuron Self-Growing Strategy. IEEE Trans. Neural Net. Learn. Syst. 2017, 28, 1439–1451. [Google Scholar] [CrossRef]
- Odgaard, P.F.; Stoustrup, J. A benchmark evaluation of fault tolerant wind turbine control concepts. IEEE Trans. Cont. Syst. Technol. 2015, 23, 1221–1228. [Google Scholar] [CrossRef]
- Tang, Z.-L.; Tee, K.P.; He, W. Tangent barrier Lyapunov functions for the control of output-constrained nonlinear systems. IFAC Proc. Vol. 2013, 46, 449–455. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pitch Actuator Condition | Parameters | Indicator |
|---|---|---|
| ) | , | |
| ) | , | , |
| Pitch Actuator Condition | Parameters | Indicator |
|---|---|---|
| Bias | ||
| Effectiveness loss | ||
| Pump wear | , | |
| Hydraulic oil leak | ||
| High air content in oil | , |
| Pitch Actuator Fault Type | Fault Effect | Fault Period |
|---|---|---|
| Bias | ||
| Pump wear | , | |
| Effectiveness loss | ||
| High air content in oil | , | |
| Hydraulic oil leak |
| Sensor | Mean | Noise Standard Deviation | Error Compared to Nominal Values (%) | |
|---|---|---|---|---|
| Rotor speed | ||||
| Generator speed | ||||
| Generator torque | ||||
| Pitch angle | ||||
| Rotor speed | ||||
| Generator speed | ||||
| Generator torque | ||||
| Pitch angle | ||||
| Rotor speed | ||||
| Generator speed | ||||
| Generator torque | ||||
| Pitch angle |
| PM (%) | |||||||
|---|---|---|---|---|---|---|---|
| Maximum | Minimum | ||||||
| B | A | W | B | A | W | ||
| Set 1 | C1 | 1.038 | 1.151 | 1.422 | 0.016 | ||
| C2 | 1.142 | 1.268 | 1.531 | ||||
| Set 2 | C1 | 1.033 | 1.230 | 1.641 | 0.014 | ||
| C2 | 1.131 | 1.359 | 1.813 | ||||
| Set 3 | C1 | 1.042 | 1.419 | 2.428 | 0.006 | 0.349 | |
| C2 | 1.136 | 1.446 | 2.482 | ||||
| Mean | Standard Deviation | ||||||
| B | A | W | B | A | W | ||
| Set 1 | C1 | 0.155 | 0.186 | 0.277 | 0.141 | 0.157 | 0.198 |
| C2 | 0.169 | 0.197 | 0.334 | 0.158 | 0.168 | 0.207 | |
| Set 2 | C1 | 0.155 | 0.249 | 0.576 | 0.144 | 0.167 | 0.209 |
| C2 | 0.117 | 0.268 | 0.629 | 0.158 | 0.182 | 0.228 | |
| Set 3 | C1 | 0.155 | 0.413 | 1.374 | 0.143 | 0.182 | 0.214 |
| C2 | 0.171 | 0.353 | 1.285 | 0.158 | 0.191 | 0.234 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Habibi, H.; Howard, I.; Simani, S. Wind Turbine Pitch Actuator Regulation for Efficient and Reliable Energy Conversion: A Fault-Tolerant Constrained Control Solution. Actuators 2022, 11, 102. https://doi.org/10.3390/act11040102
Habibi H, Howard I, Simani S. Wind Turbine Pitch Actuator Regulation for Efficient and Reliable Energy Conversion: A Fault-Tolerant Constrained Control Solution. Actuators. 2022; 11(4):102. https://doi.org/10.3390/act11040102
Chicago/Turabian StyleHabibi, Hamed, Ian Howard, and Silvio Simani. 2022. "Wind Turbine Pitch Actuator Regulation for Efficient and Reliable Energy Conversion: A Fault-Tolerant Constrained Control Solution" Actuators 11, no. 4: 102. https://doi.org/10.3390/act11040102
APA StyleHabibi, H., Howard, I., & Simani, S. (2022). Wind Turbine Pitch Actuator Regulation for Efficient and Reliable Energy Conversion: A Fault-Tolerant Constrained Control Solution. Actuators, 11(4), 102. https://doi.org/10.3390/act11040102