1. Introduction
In recent years, electric vehicle technology has developed rapidly [
1,
2]. The planetary gear reducer is used in electric vehicles due to its high transmission efficiency and compact structure. Due to the space limitation of electric vehicles, the design of compact planetary gear trains has become a key issue. Numerous optimization methods are involved in the gear train design. For example, Parmar et al. [
3] proposed a novel multi-objective optimization method, for planetary gear trains, using NSGA-II. Miler et al. [
4] chose transmission volume and power loss as design objectives, and they optimized the parameters of the planetary gear train with multi-objective optimization. Sedak et al. [
5] proposed a constrained multi-objective nonlinear optimization problem for planetary gearboxes, based on a hybrid element heuristic algorithm, considering gear volume, center distance, contact ratio, and power loss as optimization objectives. Patil et al. [
6] proposed a multi-objective optimization strategy to minimize the total volume and power loss of the two-stage helical gearbox and spur gearbox. Compared to the single-objective optimization method with tribological constraints, the multi-objective optimization results in less power loss. Savsani et al. [
7] used the particle swarm optimization algorithm, and the simulated annealing algorithm, to carry out the optimization design of the lightweight spur gear transmission system, and, resultingly, this method is deemed to be suitable for the single-objective or multi-objective optimization design of the multi-stage spur gear transmission. Considering the above research, the main challenge of gear transmission design is in reducing weight and power loss. At present, the optimization design method of planetary gear trains mainly considers the determining system parameters and implements the conventional deterministic optimization method. However, for practical engineering structures, many uncertainties are observed in the material properties, manufacturing, and measurement [
8,
9,
10,
11,
12]. To obtain a reliable structural design, the uncertainties of the planetary gear train of electric vehicles need to be considered.
Uncertainty optimization in engineering design has gradually attracted attention [
13,
14,
15]. For example, Xian et al. [
16] proposed an effective analysis framework for stochastic optimization pertaining to non-linear viscous dampers of energy dissipation structures, which was applied to the uncertainty optimization of non-linear viscous dampers of suspension bridges. Lü et al. [
17] proposed an efficient approach for the optimization design of dual uncertain structures, taking into account the dual robust design and the possibility of failure, quickly estimating the dual uncertain target of fuzzy random variables, and equivalently solving the possibility constraints involving fuzzy randomness. Baek et al. [
18] developed a design method of a composite microwave absorbing structure using reliability-based optimization (RBO), which considers the failure probability. Compared with the results of deterministic optimization (DO), it was found that the total thickness of the reliability design method increased slightly, but RBO significantly reduced the failure probability. Fang et al. [
19] developed an effective multi-objective uncertainty optimization program in order to design car doors. The program analyzed the impact of changing the uncertainty conditions and improving the reliability level, and it provided clear design information for decision-makers. Zhang et al. [
20] proposed a reliable uncertainty optimization design route for obtaining optimal energy-absorbing structures. The study found that the solution obtained, by uncertainty optimization, sacrificed certain demand performance, but it was more reliable than deterministic design. The above studies have carried out the uncertainty optimization based on the probability model, which is highly dependent on statistical data. Considering that the distribution of uncertainty requires a lot of data, it is of a high cost to obtain effective probability data from a practical engineering perspective.
To overcome the limitation, of uncertainty optimization, due to the lack of data, some interval uncertainty modes have been gradually developed and applied to engineering optimization [
21,
22]. The interval uncertainty model mainly focuses on the upper and lower boundaries of uncertainty values, which is easier to implement than the probabilistic uncertainty model. Inuiguchi et al. [
23] proposed a linear multi-objective strategy based on maximum and minimum regret criteria to solve the problem of interval uncertainty in the objective function. Fu et al. [
24] developed a multi-objective direct structural optimization method for solving interval uncertainty. This method uses the satisfaction value of the interval possibility model to deal with non-linear uncertain constraints, and it judges the feasibility and infeasibility of individual design vectors. Wu et al. [
25] proposed a non-probabilistic robust topology optimization method for interval uncertain structures. The method uses the Chebyshev interval inclusion function to realize the non-invasiveness of the interval algorithm. Wang et al. [
26] developed an effective interval uncertain optimization design strategy using Legendre polynomial chaotic expansion, which is more efficient than the conventional method. Hou et al. [
27] carried out the uncertainty optimization, pertaining to the energy efficiency of ships in icy areas, considering the interval parameters; the optimization results provided practical guidance for the energy-saving design of ships in the case of uncertainty in the actual environment. Yu et al. [
28] regarded friction coefficient, material properties, and wear element thickness as interval uncertainty factors, and proposed an uncertainty optimization method for the noise suppression of the brake system.
The above studies have developed a highly effective uncertainty optimization method based on the interval model, and they have applied it to solve practical engineering problems. The interval model has been validated as a highly applicable uncertainty optimization method. Uncertainties in the manufacturing and operation of the planetary gear train of electric vehicles are unavoidable. The process of efficiently solving multi-objective uncertainty problems for the planetary gear train of electric vehicles is still a key issue. Therefore, a multi-objective uncertainty optimization design (MUOD) framework is developed for the planetary gear train of an electric vehicle in this study.
Section 2 describes the detailed methodology of MUOD.
Section 3 describes the design requirement of the planetary gear train of an electric vehicle.
Section 4 shows the optimization results. The main conclusions are drawn in
Section 5.
2. Methodology
2.1. Multi-Objective Uncertainty Optimization Problem
In general, the multi-objective deterministic optimization design (MDOD) model can be expressed as follows [
29,
30]:
In the formula,
are the objective functions and
is the number of objectives.
is the inequality constraint and
is the number of its constraints;
is the equality constraint, and
is the number of its constraints; and
is the design space. Different from the conventional deterministic optimization, the uncertainties of optimization variables and other relevant design parameters need to be considered during actual processing. Stochastic probability models are often used to construct uncertainty models, but the distribution information of uncertainties is unknown due to the lack of test samples. Therefore, the interval uncertainty model is employed in this study [
31]. The multi-objective deterministic optimization can be transformed into the interval uncertainty problem, as follows:
In the formula,
and
are interval design variables and other relevant design parameters, respectively. The superscripts
and
represent the nominal value and interval radius, respectively. The interval radius of an interval value reflects its fluctuation range and can be expressed as uncertainty deviation. When the design variables and other relevant parameters are interval values, the relationship of reliability-based possibility degree
can be used to transform the interval uncertainty models into general non-interval models [
31]. For the interval values
,
and
,
The superscripts
and
represent the lower and the upper values, respectively. The reliability-based possibility degree of the interval level should be given beforehand based on the actual reliable problem. Therefore, the multi-objective uncertainty optimization model can be expressed as:
In the formula,
is the requirement of reliability-based possibility degree, and it also represents the equivalent reliability with different constraints. The main optimization goals and constraints have been described in
Section 3.
Nested optimization design is often used in interval uncertainty optimization, which treats the uncertainty analysis problem as an internal optimization problem. The purpose of inner optimization is to evaluate the propagation of uncertainty and feed it back to the outer optimization route. It is worth considering that adding a new optimization solver will cause low computational efficiency. Therefore, Taylor expansion, as an effective decoupling method, is applied to analyze the propagation of uncertainty in this study [
32]. The constraint function
can be approximately constructed by first-order Taylor expansion, that is:
Therefore, the lower and upper bounds of the constraint function can be expressed as follows:
Generally, the Taylor formula can achieve the best approximation in the case of a small interval uncertainty. Further, the calculation accuracy can be improved by establishing a subinterval to compensate for the nonlinear approximation error. For the uncertainty values
,
In the formula,
and
are the
sth subinterval and the subinterval number, respectively. The subinterval number can be determined by referring to the number of uncertain parameters. The interval range of constraint function
is expressed as follows:
Through the above interval uncertainty analysis method, the uncertain information of constraint function can be solved by using the approximate direct decoupling method.
2.2. Improved Evolutionary Algorithm
The classical non-dominated sorting genetic algorithm (NSGA-II) generally uses the random function to generate the initial population [
33], and its population uniformity is poor. The crossover probability and mutation probability of classical NSGA-II are set to a fixed value, respectively, and the optimization algorithm falls into the premature problem. Therefore, this paper adopts the improved NSGA-II designed by using chaotic and adaptive evolutionary strategies in order to obtain the multi-objective solution set.
Here, a chaotic strategy is used to generate the initial population of a multi-objective evolutionary algorithm, which can improve the diversity of the population. Tent map is one of the most commonly used mapping functions for generating chaotic sequences [
34]. Here, the main steps of population chaos initialization and assignment, using the Tent mapping method, are as follows:
Step 1: Randomly generate an N-dimensional random number vector, , , where is the number of optimization variables.
Step 2: The improved Tent mapping method is used to calculate the chaotic component of each optimized variable, as follows:
In the formula, = 1, 2, …, , and is the population size; = 1, 2, …, Nv.
Step 3: Substitute each chaotic component obtained in Step 2 into the real range of each optimization variable, as follows:
In the formula, and are the lower and upper bounds of the th optimized variable respectively.
Here, the adaptive evolutionary strategy mainly improves the crossover and mutation operators. The adaptive crossover probability and mutation probability are generated according to the number of iterations, which is helpful to accelerate the convergence of optimization. In this study, the exponential function is applied to the adaptive adjustment mode of crossover probability and mutation probability. The calculation formula is described as follows:
In the formula, and are the crossover probability and mutation probability at the th iteration; and are the initial crossover probability and mutation probability respectively; is the total evolutionary generation.
2.3. Multi-Criteria Decision Making (MCDM) Method
Usually, the Pareto solution set in multi-objective optimization can provide decision-makers with numerous feasible design schemes at the early stage of design, but it cannot directly obtain the most satisfactory solution. In addition, the weight method aggregates multi-objective optimization into a single comprehensive objective to obtain the ideal optimal solution. However, although some decision-makers are full of engineering experience, it is nonetheless difficult to assign the optimal weight to each optimization objective. Therefore, as a multi-criteria decision making (MCDM) model, grey relational analysis (GRA) will be applied to select the most satisfactory scheme in Pareto sets [
35,
36,
37]. Here, the GRA with entropy weight method is proposed to identify the most satisfactory solution. The normalization method can be adopted in the grey relation analysis, depending on the characteristics of the original sequence. When the target value of the original sequence is “the larger the better”, the original sequence can be normalized as:
In the formula,
is a new sequence after normalization;
is the maximum value of the original sequence; and
is the minimum value of the original sequence. When the target value of the original sequence is “the smaller the better”, the original sequence can be normalized as:
After normalization, the grey relational coefficient
, which is used to quantify the relationship between the target and actual normalized results, can be formulated as [
26]:
In the formula,
is the deviation between reference sequence
and the compared sequence
, as follows:
is the distinguishing coefficient,
, and
= 0.5 in this study. After obtaining the grey relational coefficient, the grey relational grade
is presented in a weighted sum of the grey relational coefficients, as follows:
For the actual engineering requirements, the effect of each criterion on the design objectives is not exactly the same; resultingly, Equation (25) can be modified to
In the formula, is a weight of criterion. In this study, is determined by the entropy weight method. The weight is calculated by using the entropy weight method according to the variation degree of each criterion.
Different from the analytic hierarchy process (AHP) [
38], the entropy weight method can objectively obtain the weight of each criterion according to the amount of information provided by each criterion and the correlation between the criteria, which overcomes the subjectivity in determining the weight of the criterion. Assuming
is the
alternative value of the
evaluation criterion, and the initial evaluation matrix is
.
The proportion of the
alternative value of the
evaluation criterion is [
39]:
The entropy
of the
criterion is:
When
is equal to 0, to ensure that
is meaningful, Equation (23) can be modified to:
Therefore, the entropy weight of the
criterion can be expressed as follows:
2.4. Main Processes of MUOD
The main steps of the multi-objective uncertainty optimization design (MUOD) framework are as shown in
Figure 1:
Step 1: Define multi-objective optimization problems, optimization variables, objectives, and constraint functions. This step is similar to conventional deterministic multi-objective optimization.
Step 2: The interval optimization problem is transformed into a deterministic optimization problem using the relationship of reliability-based possibility degree. It should be noted that the interval uncertainty transformation mainly aims at the inequality constraints in the multi-objective optimization model. The lower and upper values of constraint functions can be solved directly by using the approximate direct decoupling method.
Step 3: The execution process of the multi-objective evolutionary algorithm. An improved multi-objective evolutionary algorithm is applied to calculate the transformed mathematical model in Step 2. The improved NSGA-II is designed in
Section 2.2. The initial crossover probability and mutation probability are 0.8 and 0.1.
Step 4: The execution process of the MCDM method. The MCDM method is described in
Section 2.3. The GRA with entropy weight method is applied to choose the most satisfactory solution in Pareto sets. The objective weight is calculated by using the entropy weight method, and the grey relational grade is calculated by Equation (26).
4. Optimization Results and Discussions
In this study, the helix angle
, face width
, elastic modulus
, and input torque
are considered uncertain. The uncertain helix angle
and face width
are regarded as the uncertainty of manufacturing size. The uncertain elastic modulus
is regarded as the uncertainty of material. The uncertain input torque
is regarded as the uncertainty of load input. This study defines three uncertainty cases with different uncertainty deviations, which correspond to different degrees of uncertainty deviations, as shown in
Table 3. Therefore, the constraint functions related to the above uncertain values can be regarded as uncertainty constraints. Uncertainty constraints mainly include tooth width coefficient, minimum teeth of no-undercut, adjacency constraint, contact stress constraint, and bending stress constraint. The nominal values of elastic modulus
and input load
are 210 GPa and 3936 N·m, respectively. All requirements of reliability-based possibility degree
are defined as 0.8.
Here, the classical NSGA-II and multi-objective particle swarm optimization (MOPSO) are implemented in order to explore the feasibility of the improved NSGA-II. The initial population size is 400, the maximum number of iterations is 200, and the objective number of non-dominated solutions is 200.
Figure 4 shows the iterative history of MDOD by using MOPSO, NSGA-II, and improved NSGA-II. The number of non-dominated solutions obtained by improved NSGA-II increases steadily, and improved NSGA-II can obtain non-dominated solutions more efficiently than MOPSO and NSGA-II. Therefore, the improved NSGA-II designed in this paper is effective, and it contains better optimization potential than the classical NSGA-II and MOPSO. The improved NSGA-II will be implemented for MUOD.
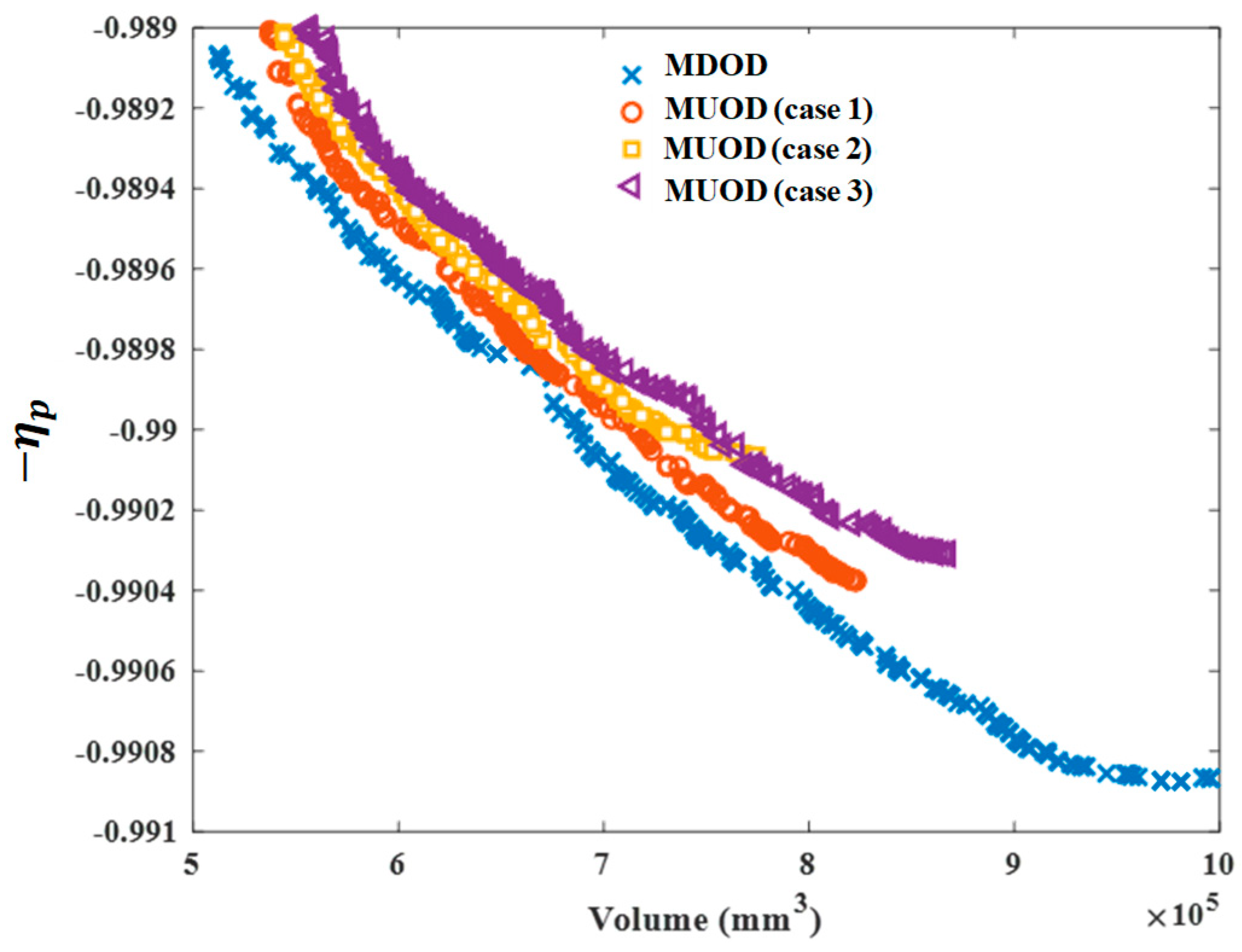
Figure 5 shows the optimal Pareto solution sets of MDOD and MUOD. There is an intense conflict between volume and transmission efficiency, which cannot achieve the common optimization; that is, the further improvement of one objective will inevitably worsen the other objective. The Pareto solution set of deterministic optimization design is lower than that of uncertainty optimization design, and the optimization objective of deterministic optimization design is better than uncertainty optimization design. In general, the inequality constraint of deterministic optimization is mainly concentrated near the constraint boundary, so its Pareto solution set has more loose space, and it is easier to obtain the better solution. It should be noted that, with the increase of uncertainty, the optimization results of MUOD tend to be conservative. To obtain the optimal solutions in different multi-objective optimization models, this study makes a trade-off analysis on the Pareto solution set by using the MCDM method. The optimal results of MDOD and MUOD are shown in
Appendix A.
Table A1 presents the optimization results of MDOD, and
Table A2,
Table A3 and
Table A4 present the optimization results of MUOD. The alternatives of different optimization methods are sorted according to the grey correlation degree, and the optimal solutions of all optimization methods are shown in bold. It is found that all moduli are 2, which means that the optimization space for modulus is small. Here, three uncertainty cases are substituted into all optimization results, and the obtained constraints are shown in
Table 4. The optimal result of MDOD shows that the
of the upper bound of tooth width coefficient is less than 0.8, and the bending stress is less than 0.8 when the uncertainty range is the largest (Case 3). From another perspective, the bending stress constraint and the tooth width coefficient constraint are the most prone to failure types. In the three uncertainty cases, MUOD meets the reliability requirements for all uncertainty constraints. A higher
indicates that the farther the optimization result is from the boundary of the inequality constraint, the higher its reliability. Compared with the conventional MDOD, the MUOD proposed in this study can design a more reliable planetary gear train and reduce the risk of constraint failure. The results show that MUOD sacrifices certain performance, but it is more reliable than MDOD.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




