
Research on the Identification of Tyre-Road Peak Friction Coefficient under Full Slip Rate Range Based on Normalized Tyre Model


Abstract
:1. Introduction
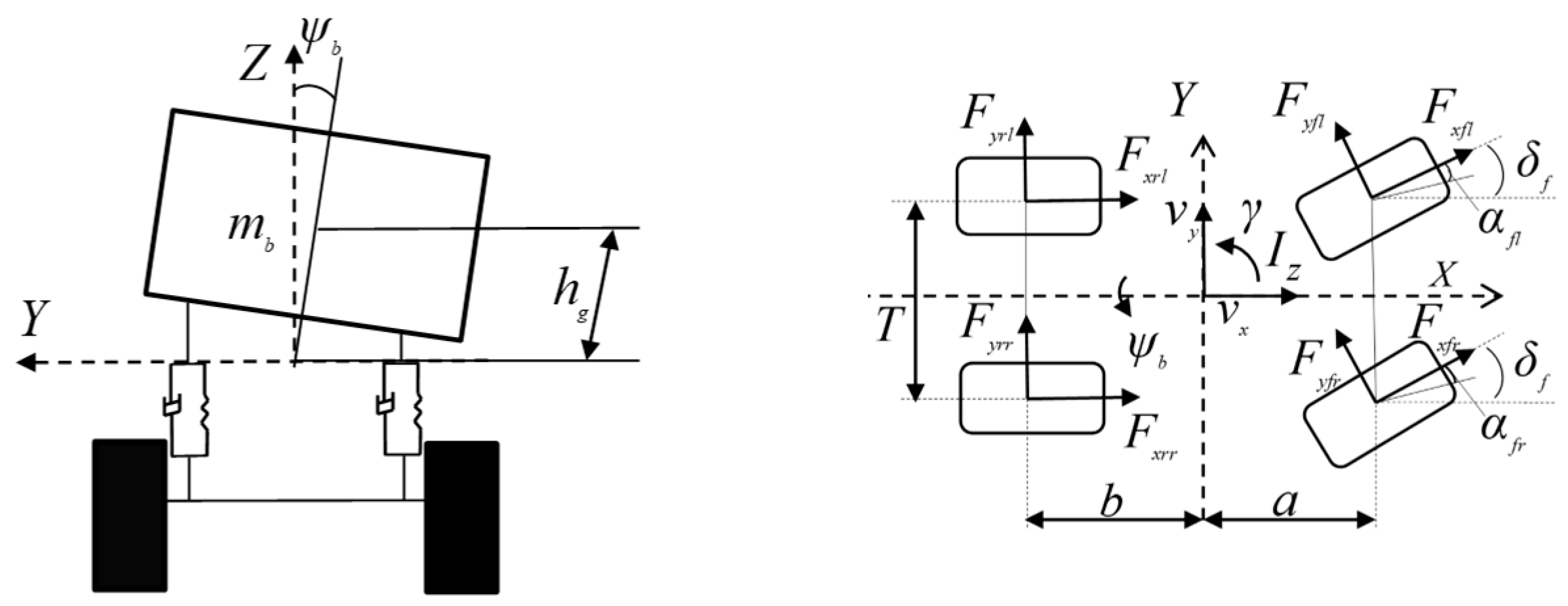
2. Establish Vehicle Dynamics Model
3. Normalized Strategy
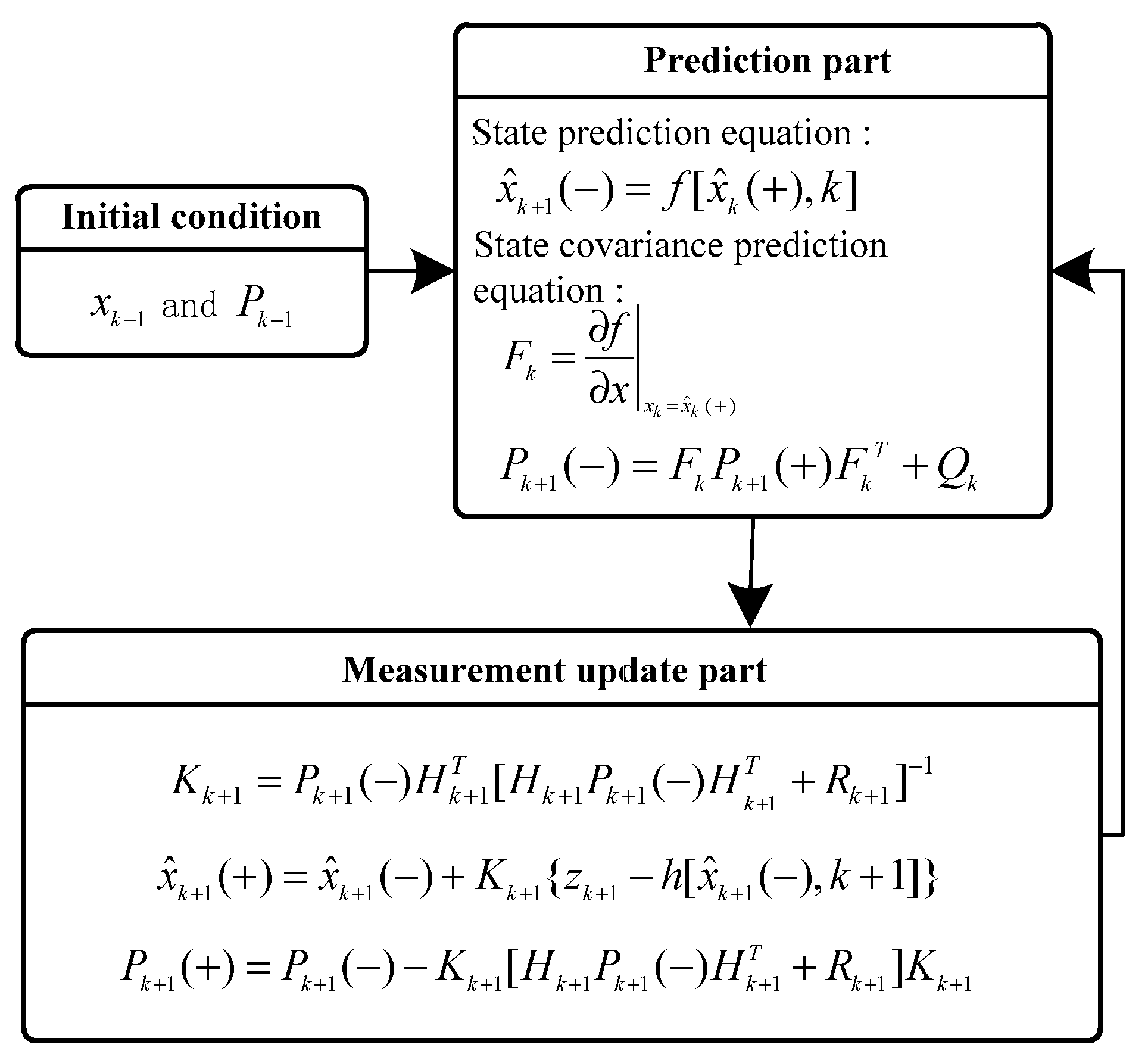
3.1. Estimation Algorithm Process
3.2. Construction of Normalized Strategy
3.2.1. Kiencke Tyre Model
3.2.2. Similarity Analysis
3.3. Tyre Model
3.3.1. MF Tyre Model
3.3.2. Normalization of Tyre Model
3.3.3. Establish System Equation
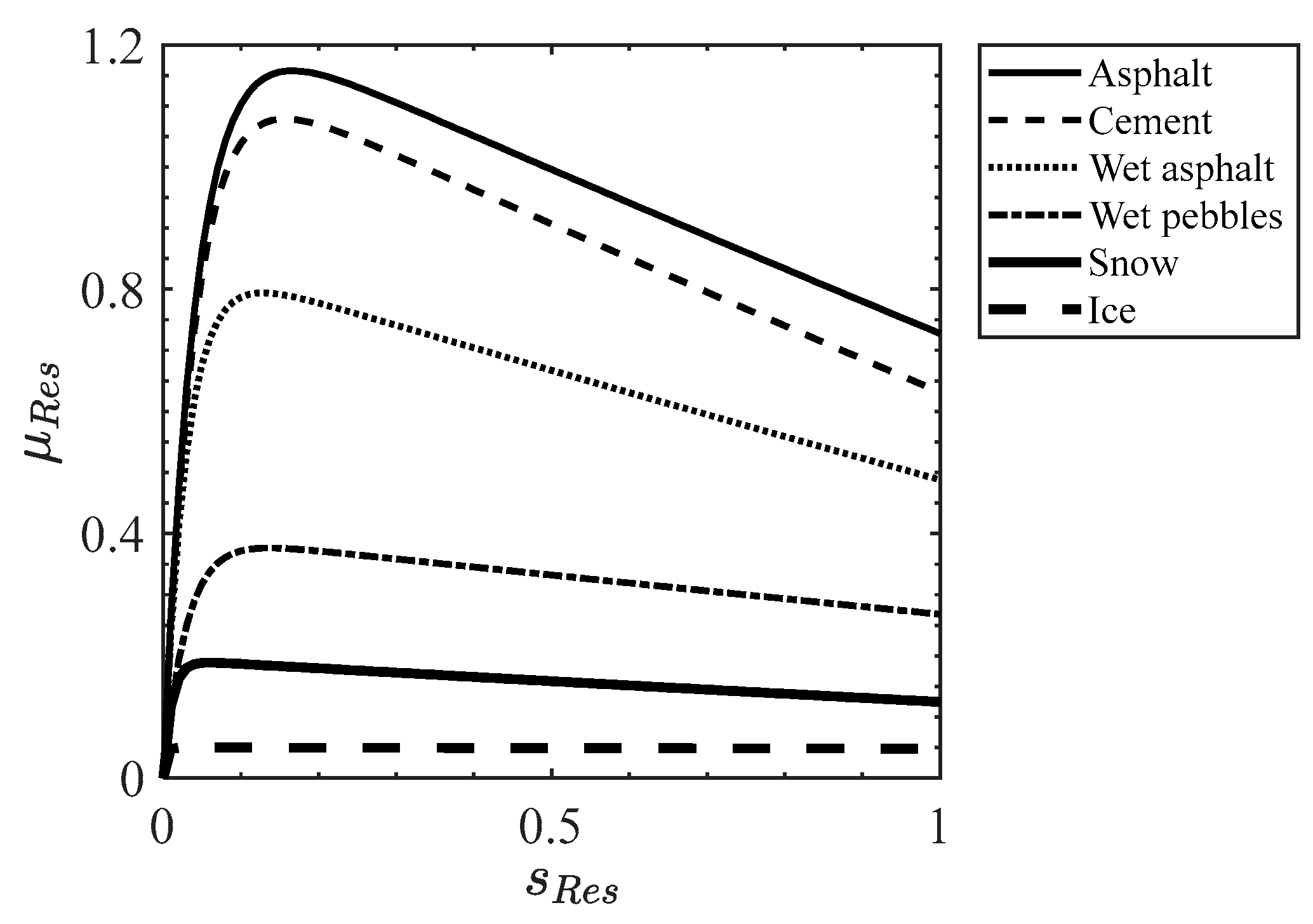
3.4. Determination of Adjacent Road
4. EKF Estimation Algorithm
5. Simulation Analysis and Verification
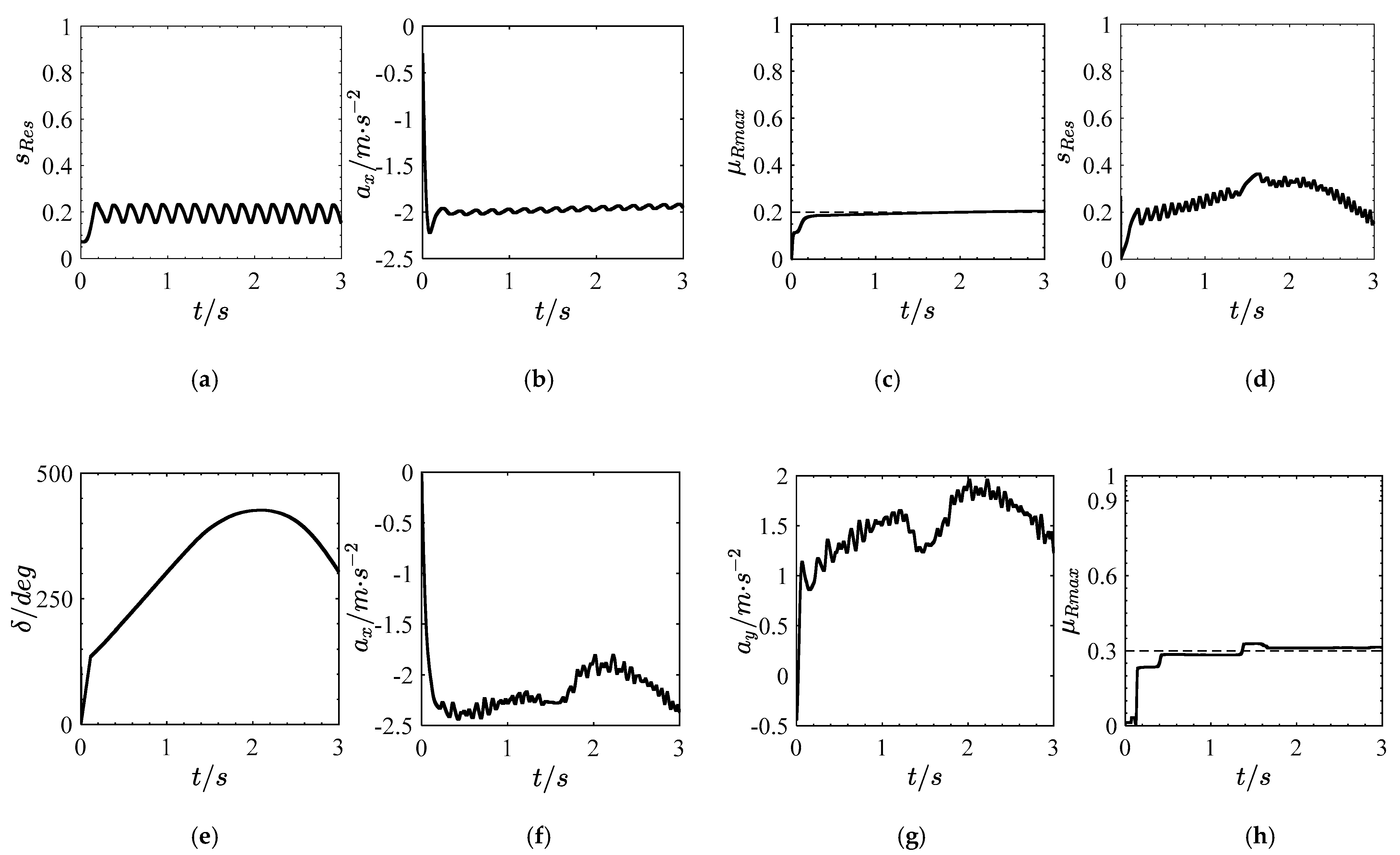
5.1. Simulation on High Adhesion Road
5.1.1. Linear-Braking Condition
5.1.2. Curve-Braking Combined Condition
5.2. Simulation on Low Adhesion Road
5.2.1. Linear-Braking Condition
5.2.2. Curve-Braking Combined Condition
6. Test Verification
6.1. Calibration Test of Tyre-Road Peak Friction Coefficient
6.2. Real Vehicle Test
6.2.1. Straight Line Test
6.2.2. Steady-State-Turning Test
7. Conclusions
Highlights
- The proposed strategy can improve the estimation algorithm’s compatibility for the tyre model and expand the application scope.
- The proposed strategy can improve the sensitivity to road excitation and improve adaptability to vehicle-driving conditions.
- Satisfactory estimation results are obtained in both simulation and real vehicle tests.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (A1) | |
| (A2) | |
| (A3) | |
| (A4) | |
| (A5) | |
| (A6) | |
| (A7) | |
| (A8) | |
| (A9) | |
| (A10) | |
| (A11) | |
| (A12) |
| (A13) | |
| (A14) | |
| (A15) | |
| (A16) | |
| (A17) | |
| (A18) | |
| (A19) | |
| (A20) | |
| (A21) | |
| (A22) | |
| (A23) | |
| (A24) |
References
- Guo, C.; Wang, X.; Su, L.; Wang, Y. Safety distance model for longitudinal collision avoidance of logistics vehicles considering slope and road adhesion coefficient. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 235, 498–512. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control, 2nd ed.; Springer Science: London, UK, 2012. [Google Scholar]
- Hu, J.; Rakheja, S.; Zhang, Y. Tire–road friction coefficient estimation based on designed braking pressure pulse. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 1876–1891. [Google Scholar] [CrossRef]
- Ma, B.; Lv, C.; Liu, Y.; Zheng, M.; Yang, Y.; Ji, X. Estimation of Road Adhesion Coefficient Based on Tire Aligning Torque Distribution. J. Dyn. Syst. Meas. Control 2017, 140, 051010. [Google Scholar] [CrossRef]
- Manuel, A.; Stratis, K.; Mike, B. Road friction virtual sensing: A review of estimation techniques with emphasis on low excitation approaches. Appl. Sci. 2017, 7, 1230. [Google Scholar]
- Peng, Y.; Chen, J.; Ma, Y. Observer-based estimation of velocity and tire-road friction coefficient for vehicle control systems. Nonlinear Dyn. 2019, 96, 363–387. [Google Scholar] [CrossRef]
- Khaleghian, S.; Emami, A.; Taheri, S. A technical survey on tyre-road friction estimation. Friction 2017, 5, 123–146. [Google Scholar] [CrossRef] [Green Version]
- Meyer, W.E.; Walter, J.D. Frictional Interaction of Tire and Pavement; ASTM International: Philadelphia, PA, USA, 1983. [Google Scholar]
- Ping, X.; Cheng, S.; Yue, W.; Du, Y.; Wang, X.; Li, L. Adaptive estimations of tyre–road friction coefficient and body’s sideslip angle based on strong tracking and interactive multiple model theories. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 3224–3238. [Google Scholar] [CrossRef]
- Leng, B.; Jin, D.; Xiong, L.; Yang, X.; Yu, Z. Estimation of tire-road peak adhesion coefficient for intelligent electric vehicles based on camera and tire dynamics information fusion. Mech. Syst. Signal Process. 2020, 150, 107275. [Google Scholar] [CrossRef]
- Hong, S.; Erdogan, G.; Hedrick, K.; Borrelli, F. Tyre-road friction coefficient estimation based on tyre sensors and lateral tyre deflection: Modelling, simulations and experiments. Veh. Syst. Dyn. 2013, 51, 627–647. [Google Scholar] [CrossRef]
- Alonso, J.; López, J.; Pavón, I.; Recuero, M.; Asensio, C.; Arcas, G.; Bravo, A. On-board wet road surface identification using tyre/road noise and Support Vector Machines. Appl. Acoust. 2014, 76, 407–415. [Google Scholar] [CrossRef]
- Xiong, Y.; Yang, X. A review on in-tire sensor systems for tire-road interaction studies. Sens. Rev. 2018, 38, 231–238. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, L.; Wu, H.; Zhang, Z.; Li, Y.; Liang, Y. An estimation scheme of road friction coefficient based on novel tyre model and improved SCKF. Veh. Syst. Dyn. 2021. [Google Scholar] [CrossRef]
- Gustafsson, F. Slip-based tire-road friction estimation. Automatica 1997, 33, 1087–1099. [Google Scholar] [CrossRef]
- Gustafsson, F. Monitoring tire-road friction using the wheel slip. IEEE Control Syst. 1998, 18, 42–49. [Google Scholar]
- Wang, J.; Alexander, L.; Rajamani, R. Friction Estimation on Highway Vehicles Using Longitudinal Measurements. J. Dyn. Syst. Meas. Control 2004, 126, 265–275. [Google Scholar] [CrossRef]
- Germann, S.; Wurtenberger, M.; Daiss, A. Monitoring of the friction coefficient between tyre and road surface. In Proceedings of the Third IEEE Conference on Control Applications, Scotland, UK, 24–26 August 1994; Volume 1, pp. 613–618. [Google Scholar]
- de Castro, R.; Araujo, R.E.; Cardoso, J.S.; Freitas, D. A new linear parametrization for peak friction coefficient estimation in real time. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Guan, H.; Lu, P.; Zhang, A. Road surface condition identification approach based on road characteristic value. J. Terramech. 2014, 56, 103–117. [Google Scholar] [CrossRef]
- Ghandour, R.; Victorino, A.; Doumiati, M.; Charara, A. Tire/road friction coefficient estimation applied to road safety. In Proceedings of the 18th Mediterranean Conference on Control and Automation, MED’10, Marrakech, Morocco, 23–25 June 2010; pp. 1485–1490. [Google Scholar]
- Chen, L.; Bian, M.; Luo, Y.; Li, K. Maximum tire road friction estimation based on modified Dugoff tire model. In Proceedings of the International Conference on Mechanical and Automation Engineering IEEE, Jiujang, China, 21–23 July 2013; pp. 56–61. [Google Scholar]
- Xin, W.; Liang, G.; Mingming, D.; Xiaolei, L. State estimation of tire-road friction and suspension system coupling dynamic in braking process and change detection of road adhesive ability. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021. [Google Scholar] [CrossRef]
- Sharifzadeh, M.; Senatore, A.; Farnam, A.; Akbari, A.; Timpone, F. A real-time approach to robust identification of tyre–road friction characteristics on mixed-μ roads. Veh. Syst. Dyn. 2018, 57, 1338–1362. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, J.; Zhu, B. Coordinative traction control of vehicles based on identification of the tyre–road friction coefficient. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2016, 230, 1585–1604. [Google Scholar] [CrossRef]
- Gao, L.; Xiong, L.; Lin, X.; Xia, X.; Liu, W.; Lu, Y.; Yu, Z. Multi-sensor Fusion Road Friction Coefficient Estimation during Steering with Lyapunov Method. Sensors 2019, 19, 3816. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.C. Research on the Algorithm of the Road Friction Coefficient Estimation Based on the Extended Kalman Filter; Jilin University: Changchun, China, 2008. [Google Scholar]
- Li, G.; Fan, D.S.; Wang, Y.; Xie, R.C. Study on vehicle driving state and parameters estimation based on triple cubature Kalman filter. Int. J. Heavy Veh. Syst. 2020, 27, 126–144. [Google Scholar] [CrossRef]
- Zong, C.; Hu, D.; Zheng, H. Dual extended Kalman filter for combined estimation of vehicle state and road friction. Chin. J. Mech. Eng. 2013, 26, 313–324. [Google Scholar] [CrossRef]
- Ren, Y.; Yin, G.; Li, G.; Xia, T.; Liang, J.; Meyer, V. Tire-Road Friction Coefficient Estimators for 4WID Electric Vehicles on Diverse Road Conditions. J. Mech. Eng. 2019, 55, 80–92. (In Chinese) [Google Scholar]
- Yi, K.; Hedrick, K.; Lee, S.C. Estimation of Tire-Road Friction Using Observer Based Identifiers. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 2010, 31, 233–261. [Google Scholar] [CrossRef]
- Zhang, L. The Research of Vehicle Stability Control Test and Control Algorithm in Ashered Limit State; China Agricultural University: Beijing, China, 2016. (In Chinese) [Google Scholar]
- Chen, L.; Bian, M.; Luo, Y.; Li, K. Real-time identification of the tyre–road friction coefficient using an unscented Kalman filter and mean-square-error-weighted fusion. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2015, 230, 788–802. [Google Scholar] [CrossRef]
- Kiencke, U.; Nielsen, L. Automotive Control Systems: For Engine, Driveline, and Vehicle; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Kuiper, E.; Van Oosten, J.J.M. The PAC2002 advanced handling tyre model. Veh. Syst. Dyn. 2007, 45, 153–167. [Google Scholar] [CrossRef]
- Bakker, E.; Nyborg, L.; Pacejka, H.B. Tyre Modeling for Use in Vehicle Dynamics Studies; SAE International Congress and Exposition: Detroit, MI, USA, 1987. [Google Scholar] [CrossRef]
- Song, Y.; Shu, H.; Chen, X.; Luo, S. Direct-yaw-moment control of four-wheel-drive electrical vehicle based on lateral tyre–road forces and tyre slip angle observer. IET Intell. Transp. Syst. 2019, 13, 303–312. [Google Scholar] [CrossRef]
- Yoon, J.H.; Eben Li, S.; Ahn, C. Estimation of vehicle sideslip angle and tire-road friction coefficient based on magnetometer with GPS. Int. J. Automot. Technol. 2016, 17, 427–435. [Google Scholar] [CrossRef]
- Hu, J.; Rakheja, S.; Zhang, Y. Real-time estimation of tire–road friction coefficient based on lateral vehicle dynamics. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 2444–2457. [Google Scholar] [CrossRef]
- Burckhardt, M. Wheel Slip Control Systems; Vogel Verlag: Würzburg, Germany, 1993. [Google Scholar]
- Yuan, C.C.; Zhang, L.F.; Chen, L.; He, Y.; Shen, J.; Bei, S. A Research on the Algorithm for Identifying the Peak Adhesion Coefficient of Road Surface. Automot. Eng. 2017, 39, 1268–1273. (In Chinese) [Google Scholar]
- ISO 21994:2007; Passenger Cars—Stopping Distance at Straight-Line Braking with ABS—Openloop Test Method. International Organization for Standardization: Geneva, Switzerland, 2007.
- ISO 4138:2004; Passengers Cars—Steady-State Circular Driving Behaviour—Open-Loop Test Methods. International Organization for Standardization: Geneva, Switzerland, 2012.
- Jafari, K.; Toufigh, V. Interface between Tire and Pavement. J. Mater. Civ. Eng. 2017, 29, 04017123. [Google Scholar] [CrossRef]





| Symbol | Value | Notes |
|---|---|---|
| mz | 880 kg | Vehicle mass |
| mb | 788 kg | Sprung mass |
| L | 2.040 m | Wheel base |
| a | 1.145 m | Distance from centroid to front axle |
| b | 0.895 m | Distance from centroid to rear axle |
| hg | 0.54 m | Centroid height |
| T | 1.3 m | Wheel track width |
| Iz | 832.3 kg·m2 | Moment of inertia about the z-axis |
| KΨ | 25,041 N/rad | Tyre slip angle stiffness |
| Road Surface Type | c1 | c2 | c3 |
|---|---|---|---|
| Dry asphalt | 1.2801 | 23.99 | 0.52 |
| Wet asphalt | 0.857 | 33.822 | 0.347 |
| Cement | 1.1973 | 25.168 | 0.5373 |
| Wet pebbles | 0.4004 | 33.7080 | 0.1204 |
| Ice | 0.05 | 306.39 | 0 |
| Snow | 0.1946 | 94.129 | 0.0646 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Y.; Lu, Y.; Chen, N.; Wang, H. Research on the Identification of Tyre-Road Peak Friction Coefficient under Full Slip Rate Range Based on Normalized Tyre Model. Actuators 2022, 11, 59. https://doi.org/10.3390/act11020059
Han Y, Lu Y, Chen N, Wang H. Research on the Identification of Tyre-Road Peak Friction Coefficient under Full Slip Rate Range Based on Normalized Tyre Model. Actuators. 2022; 11(2):59. https://doi.org/10.3390/act11020059
Chicago/Turabian StyleHan, Yinfeng, Yongjie Lu, Na Chen, and Hongwei Wang. 2022. "Research on the Identification of Tyre-Road Peak Friction Coefficient under Full Slip Rate Range Based on Normalized Tyre Model" Actuators 11, no. 2: 59. https://doi.org/10.3390/act11020059
APA StyleHan, Y., Lu, Y., Chen, N., & Wang, H. (2022). Research on the Identification of Tyre-Road Peak Friction Coefficient under Full Slip Rate Range Based on Normalized Tyre Model. Actuators, 11(2), 59. https://doi.org/10.3390/act11020059