
Disturbance-Observer-Based Dual-Position Feedback Controller for Precision Control of an Industrial Robot Arm


Abstract
1. Introduction
2. Design of the DOB-DPF Controller
2.1. DOB Design
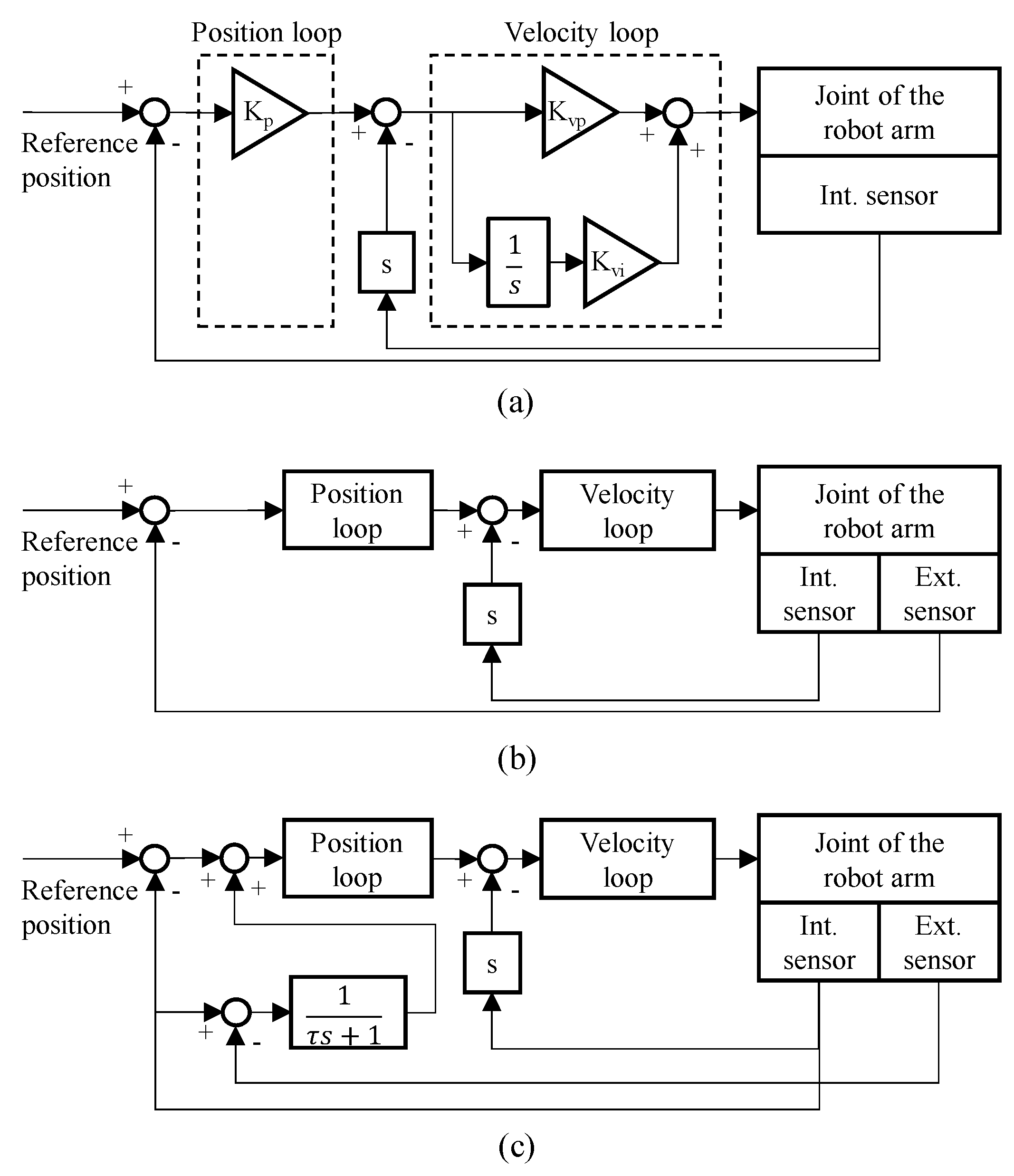
2.2. DPF Controller
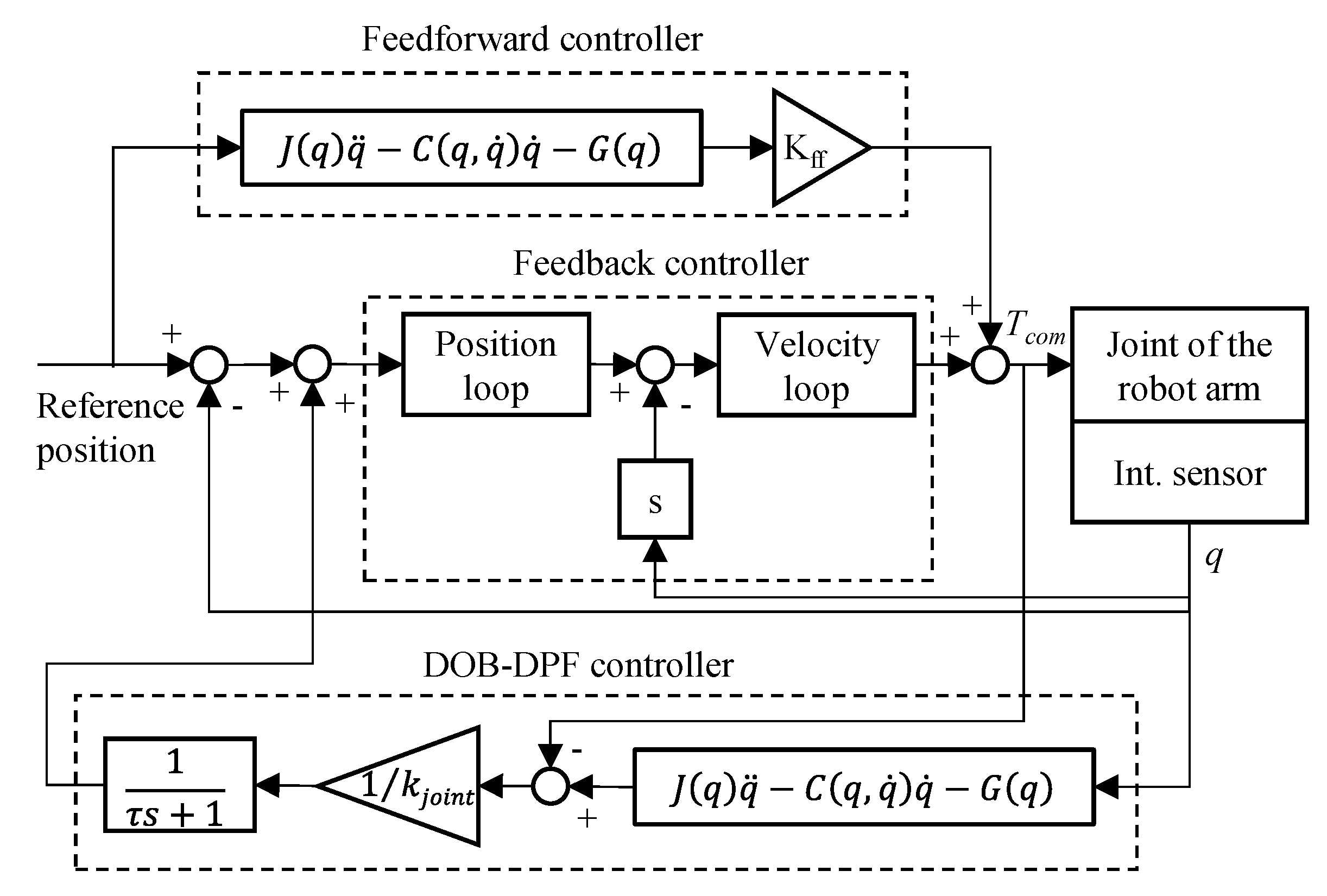
2.3. DOB-DPF Controller
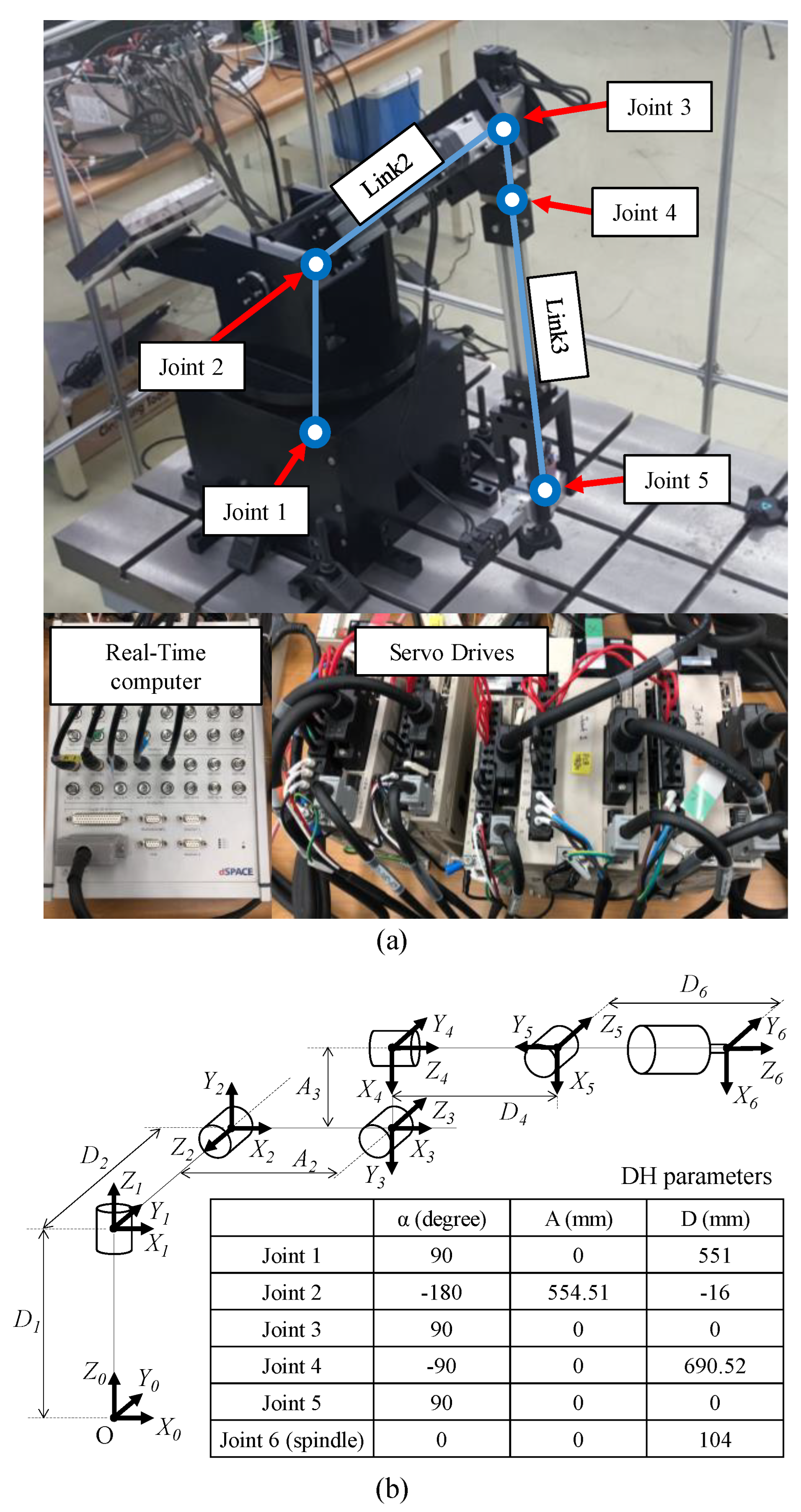
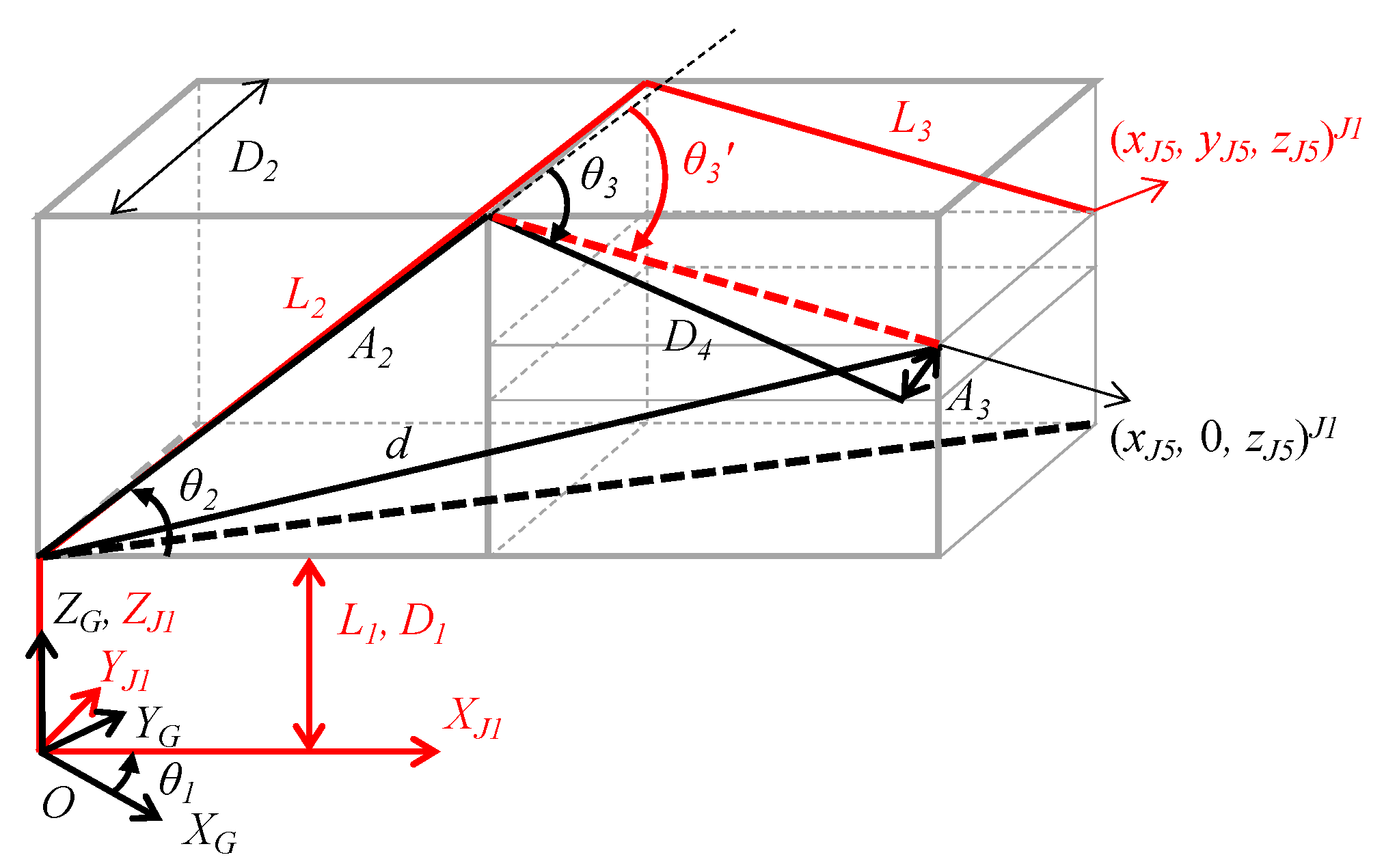
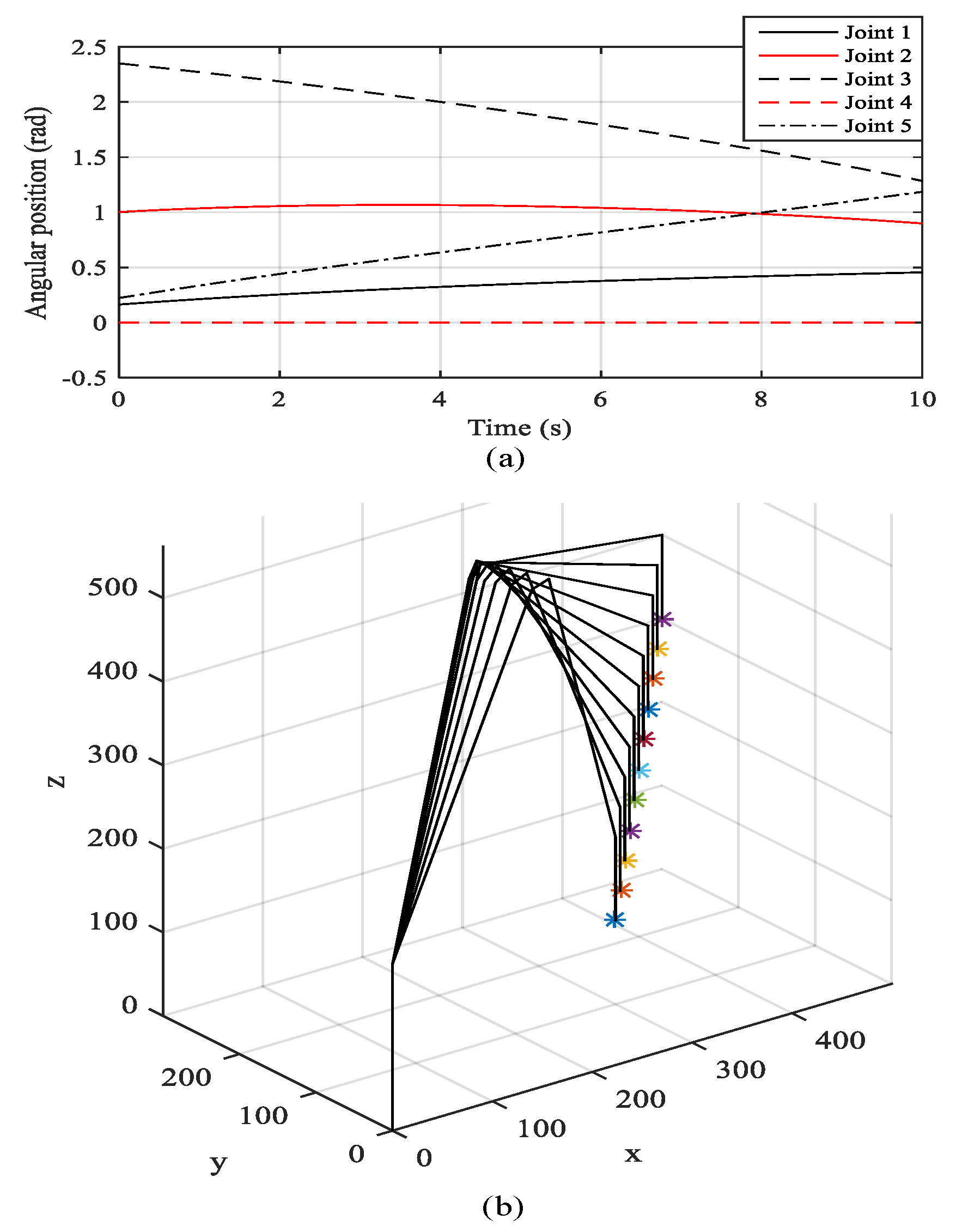
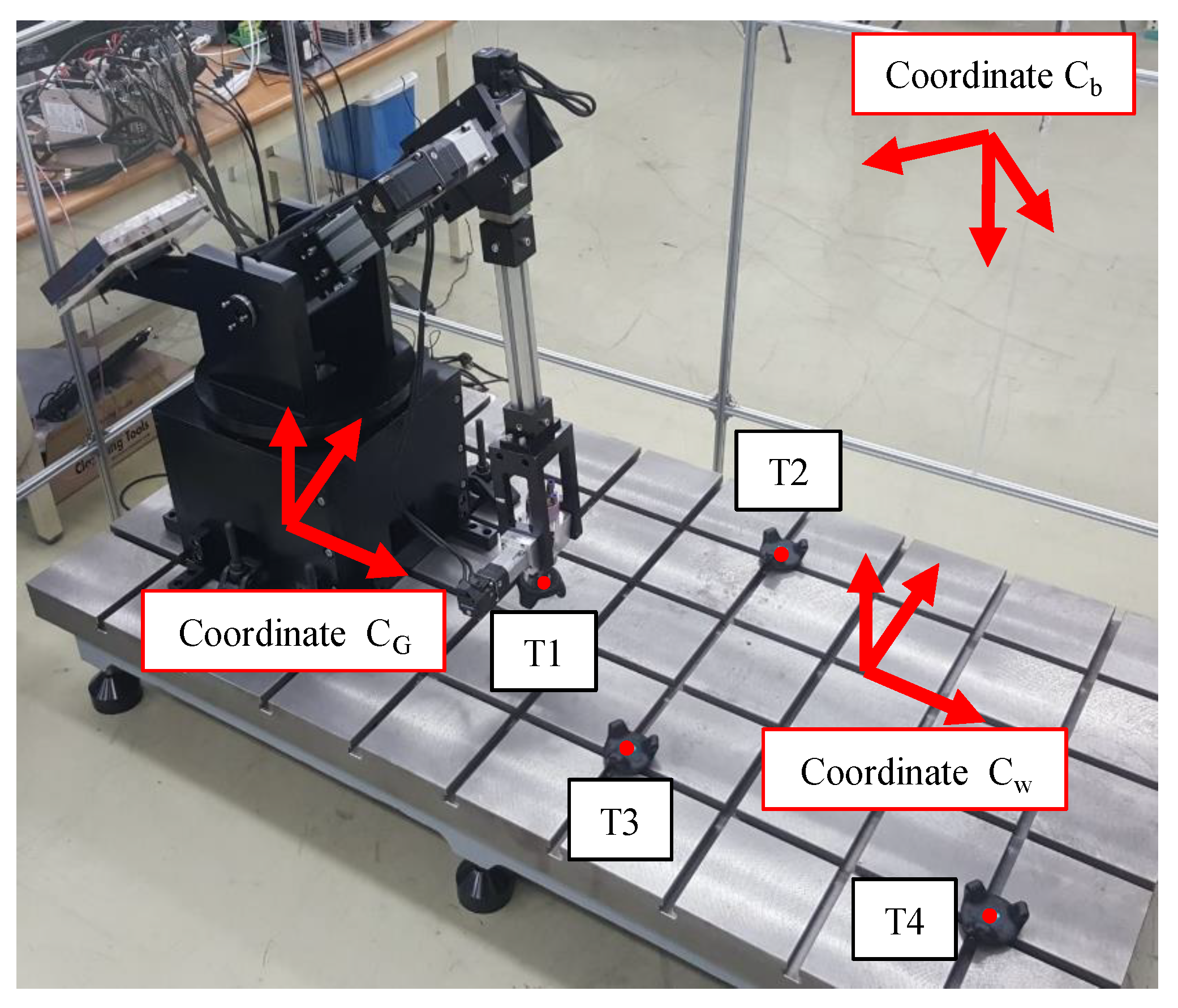
3. Design of a Five-DOF Robot Arm
3.1. Hardware Design
3.2. Controller Design
3.3. Measurement of Stiffness
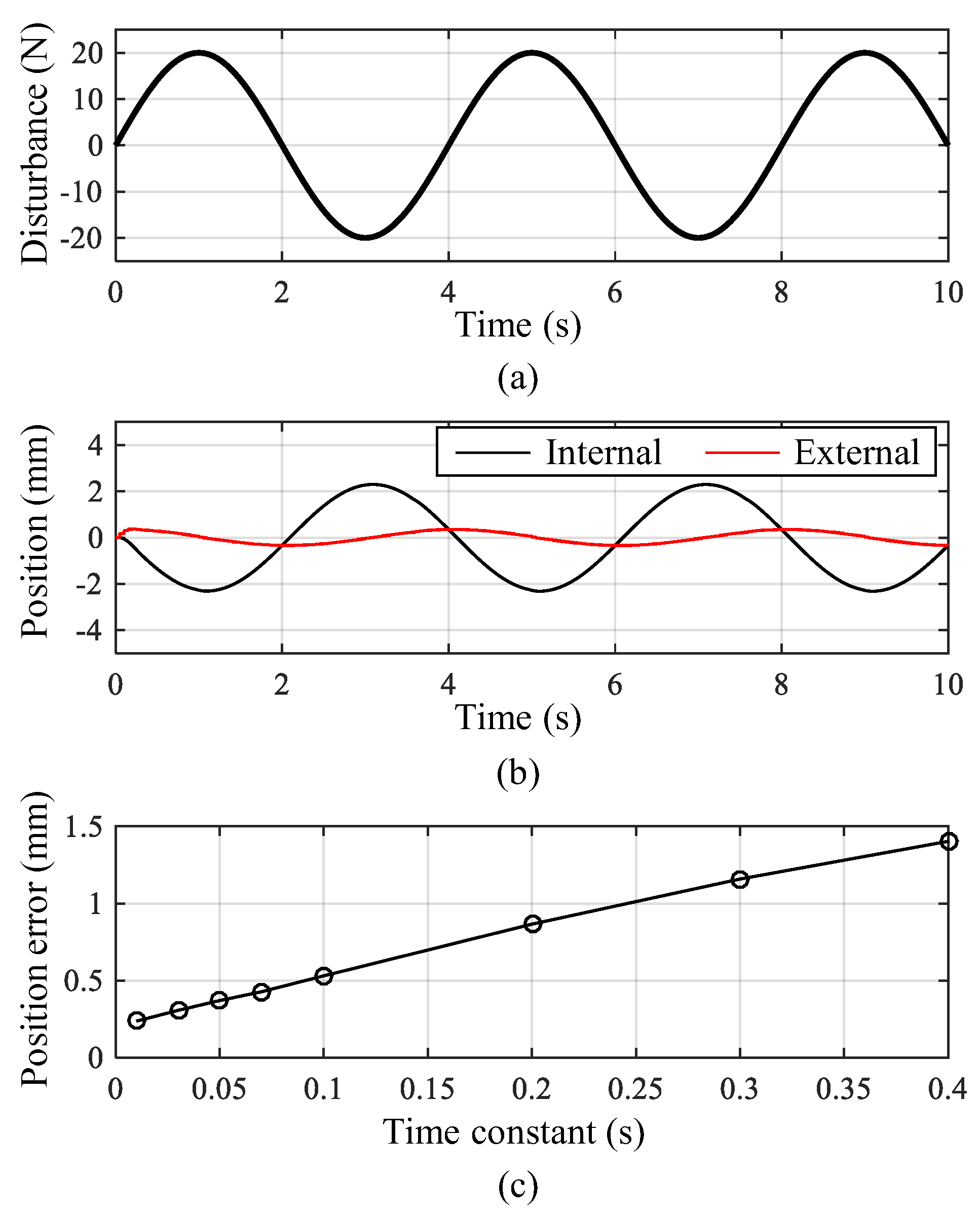
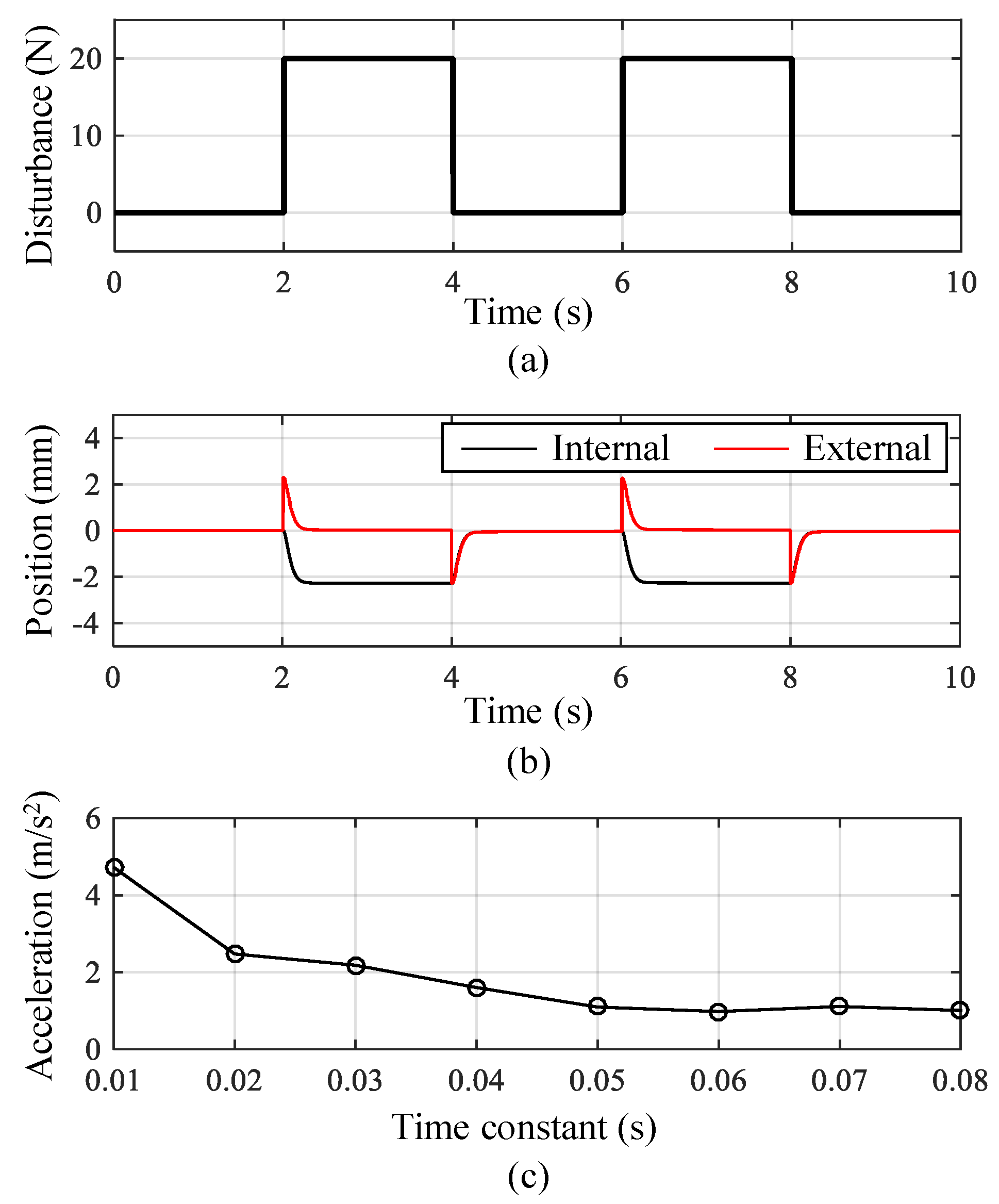
4. Evaluation of DOB-DPF Controller
4.1. Implementation of DOB-DPF Controller
4.2. External Position Sensing
4.3. Evaluation Result
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Caro, S.; Dumas, C.; Garnier, S.; Furet, B. Workpiece placement optimization for machining operations with a KUKA KR270-2 robot. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2921–2926. [Google Scholar]
- Wang, J.; Zhang, H.; Fuhlbrigge, T. Improving machining accuracy with robot deformation compensation. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 3826–3831. [Google Scholar]
- Zhang, H.; Wang, J.; Zhang, G.; Gan, Z.; Pan, Z.; Cui, H.; Zhu, Z. Machining with flexible manipulator: Toward improving robotic machining performance. In Proceedings of the 2005 IEEE/ASME Interna-tional Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005; pp. 1127–1132. [Google Scholar]
- Lee, W.; Lee, C.-Y.; Jeong, Y.H.; Min, B.-K. Distributed component friction model for precision control of a feed drive system. IEEE/ASME Trans. Mechatron. 2015, 20, 1966–1974. [Google Scholar] [CrossRef]
- Chen, Y.; Dong, F. Robot machining: Recent development and future research issues. Int. J. Adv. Manuf. Technol. 2012, 66, 1489–1497. [Google Scholar] [CrossRef]
- Belchior, J.; Guillo, M.; Courteille, E.; Maurine, P.; Leotoing, L.; Guines, D. Off-line compensation of the tool path deviations on robotic machining: Application to incremental sheet forming. Robot. Comput.-Integr. Manuf. 2013, 29, 58–69. [Google Scholar] [CrossRef]
- Munasinghe, S.R.; Nakamura, M.; Goto, S.; Kyura, N. Optimum contouring of industrial robot arms under assigned velocity and torque constraints. IEEE Trans. Syst. Man Cybern. 2001, 31, 159–167. [Google Scholar] [CrossRef]
- Olabi, A.; Damak, M.; Bearee, R.; Gibaru, O.; Leleu, S. Improving the accuracy of industrial robots by offline compensation of joints errors. In Proceedings of the 2012 IEEE International Conference on Industrial Technology, Athens, Greece, 19–21 March 2012; pp. 492–497. [Google Scholar]
- Schneider, U.; Drust, M.; Ansaloni, M.; Lehmann, C.; Pellic-ciari, M.; Leali, F.; Gunnink, J.W.; Verl, A. Improving robotic machining accuracy through experimental error investigation and modular compensation. Int. J. Adv. Manuf. Technol. 2016, 85, 3–15. [Google Scholar] [CrossRef]
- Xu, K.-J.; Li, C.; Zhu, Z.-N. Dynamic modeling and compensation of robot six-axis wrist force/torque sensor. IEEE Trans. Instrum. Meas. 2007, 56, 2094–2100. [Google Scholar] [CrossRef]
- Park, S.-K.; Lee, S.-H. Disturbance observer based robust control for industrial robots with flexible joints. In Proceedings of the 2007 International Conference on Control, Automation and Systems, Seoul, Republic of Korea, 17–20 October 2007. [Google Scholar]
- Moeller, C.; Schmidt, H.C.; Koch, P.; Boehlmann, C.; Kothe, S.; Wollnack, J.; Hintze, W. Real time pose control of an industrial robotic system for machining of large scale components in aerospace industry using laser tracker system. SAE Int. J. Aerosp. 2017, 2, 100–108. [Google Scholar] [CrossRef]
- Furuta, K.; Kosuge, K.; Mukai, N. Control of articulated robot arm with sensory feedback: Laser beam tracking system. IEEE Trans. Ind. Electron. 1988, 35, 31–39. [Google Scholar] [CrossRef]
- Park, J.; Chung, W. Design of a robust H∞ PID control for industrial manipulators. J. Dyn. Sys. Meas. Control 2000, 122, 803–812. [Google Scholar] [CrossRef]
- Zhang, G.; Li, J.; Jin, X.; Liu, C. Robust adaptive neural control for wing-sail-assisted vehicle via the multiport event-triggered approach. IEEE Trans. Cybern. 2021, 52, 12916–12928. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Li, J.; Liu, C.; Zhang, W. A robust fuzzy speed regulator for unmanned sailboat robot via the composite ILOS guidance. Nonlinear Dyn. 2022, 110, 2465–2480. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Shan, Q.; Zhang, W. A Novel Cooperative Design for USV-UAV Systems: 3D Mapping Guidance and Adaptive Fuzzy Control. IEEE Trans. Control. Netw. Syst. 2022. [Google Scholar] [CrossRef]
- Liu, S.; Wang, L.; Wang, X. Sensorless force estimation for industrial robots using disturbance observer and neural learning of friction approximation. Robot. Comput.-Integr. Manuf. 2021, 71, 102168. [Google Scholar] [CrossRef]
- Tong, S.; Min, X.; Li, Y. Observer-based adaptive fuzzy tracking control for strict-feedback nonlinear systems with unknown control gain functions. IEEE Trans. Cybern. 2020, 50, 3903–3913. [Google Scholar] [CrossRef] [PubMed]
- Cheng, X.; Tu, X.; Zhou, Y.; Zhou, R. Active disturbance rejection control of multi-joint industrial robots based on dynamic feedforward. Electronics 2019, 8, 591. [Google Scholar] [CrossRef]
- Yin, X.; Li, P. Enhancing trajectory tracking accuracy for industrial robot with robust adaptive control. Robot. Comput.-Integr. Manuf. 2018, 51, 97–102. [Google Scholar] [CrossRef]
- Mohammadi, A.; Tavakoli, M.; Marquez, H.J.; Hashemzadeh, F. Nonlinear disturbance observer design for robotic manipulators. Control. Eng. Pract. 2013, 21, 253–267. [Google Scholar] [CrossRef]
- Spong, M.W.; Hutchinson, S.; Vidyasagar, M. Robot Dynamics and Control, 2nd ed.; Wiley: Hoboken, NJ, USA, 2004; pp. 205–207. [Google Scholar]
- Kim, N.; Kim, H.; Lee, W. Hardware-in-the-loop simulation for estimation of position control performance of machine tool feed drive. Precis. Eng. 2019, 60, 587–593. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
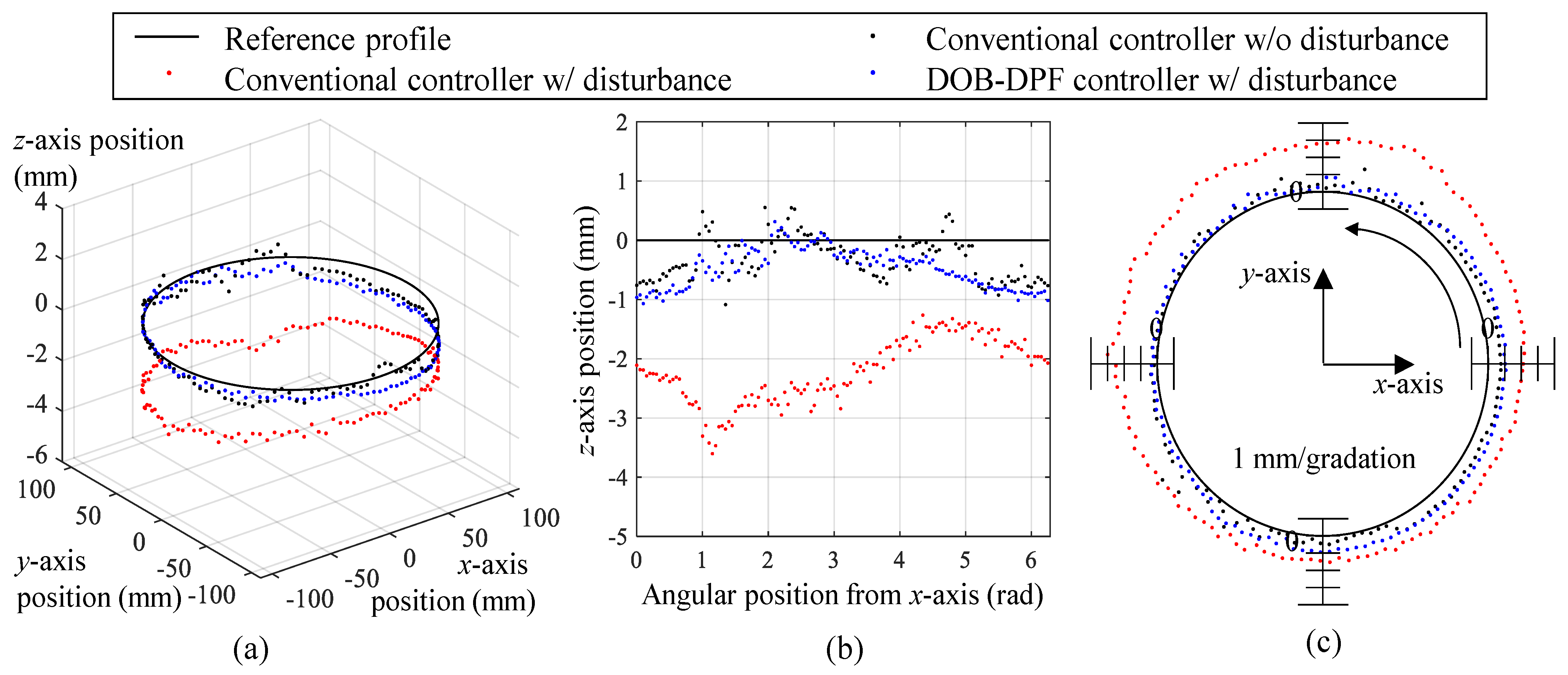
| Control Method | Contour Error (mm) | ||
|---|---|---|---|
| Peak | RMS | STD | |
| Conventional controller w/o disturbance | 1.80 | 0.59 | 0.31 |
| Conventional controller w/ disturbance | 3.60 | 2.30 | 0.55 |
| DOB-DPF controller w/ disturbance | 1.08 | 0.71 | 0.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, N.; Oh, D.; Oh, J.-Y.; Lee, W. Disturbance-Observer-Based Dual-Position Feedback Controller for Precision Control of an Industrial Robot Arm. Actuators 2022, 11, 375. https://doi.org/10.3390/act11120375
Kim N, Oh D, Oh J-Y, Lee W. Disturbance-Observer-Based Dual-Position Feedback Controller for Precision Control of an Industrial Robot Arm. Actuators. 2022; 11(12):375. https://doi.org/10.3390/act11120375
Chicago/Turabian StyleKim, Namhyun, Daejin Oh, Jun-Young Oh, and Wonkyun Lee. 2022. "Disturbance-Observer-Based Dual-Position Feedback Controller for Precision Control of an Industrial Robot Arm" Actuators 11, no. 12: 375. https://doi.org/10.3390/act11120375
APA StyleKim, N., Oh, D., Oh, J.-Y., & Lee, W. (2022). Disturbance-Observer-Based Dual-Position Feedback Controller for Precision Control of an Industrial Robot Arm. Actuators, 11(12), 375. https://doi.org/10.3390/act11120375