
A Review of Soft Actuator Motion: Actuation, Design, Manufacturing and Applications



Abstract
:1. Introduction
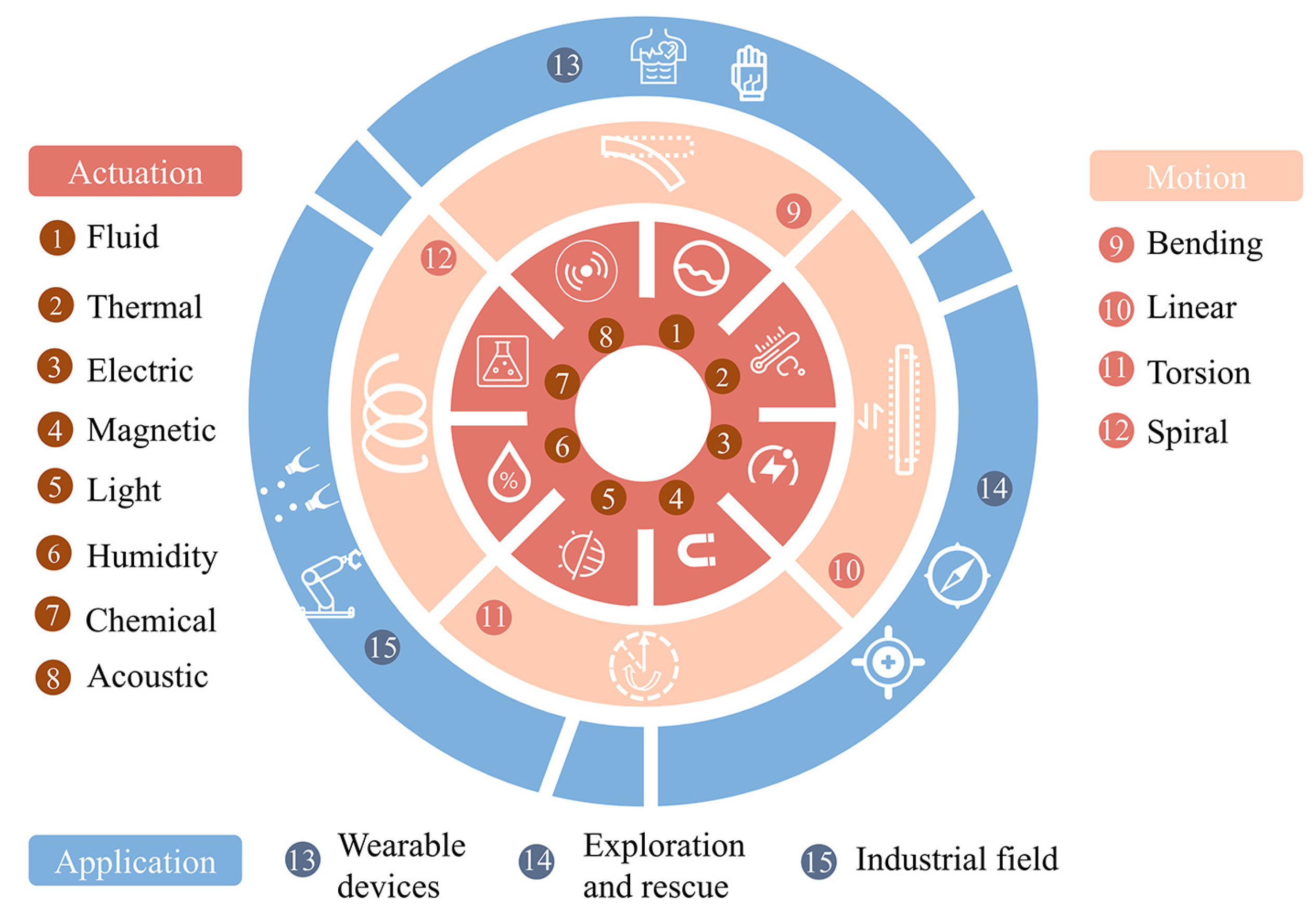
2. Actuation
2.1. Fluid Actuation
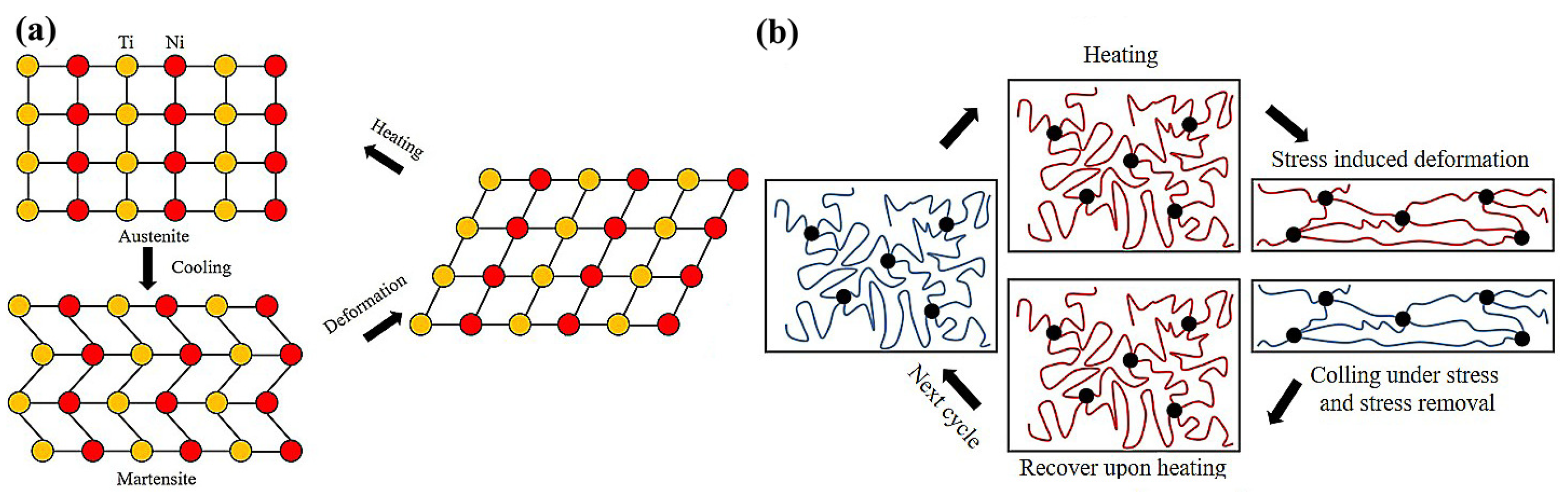
2.2. Thermal Actuation
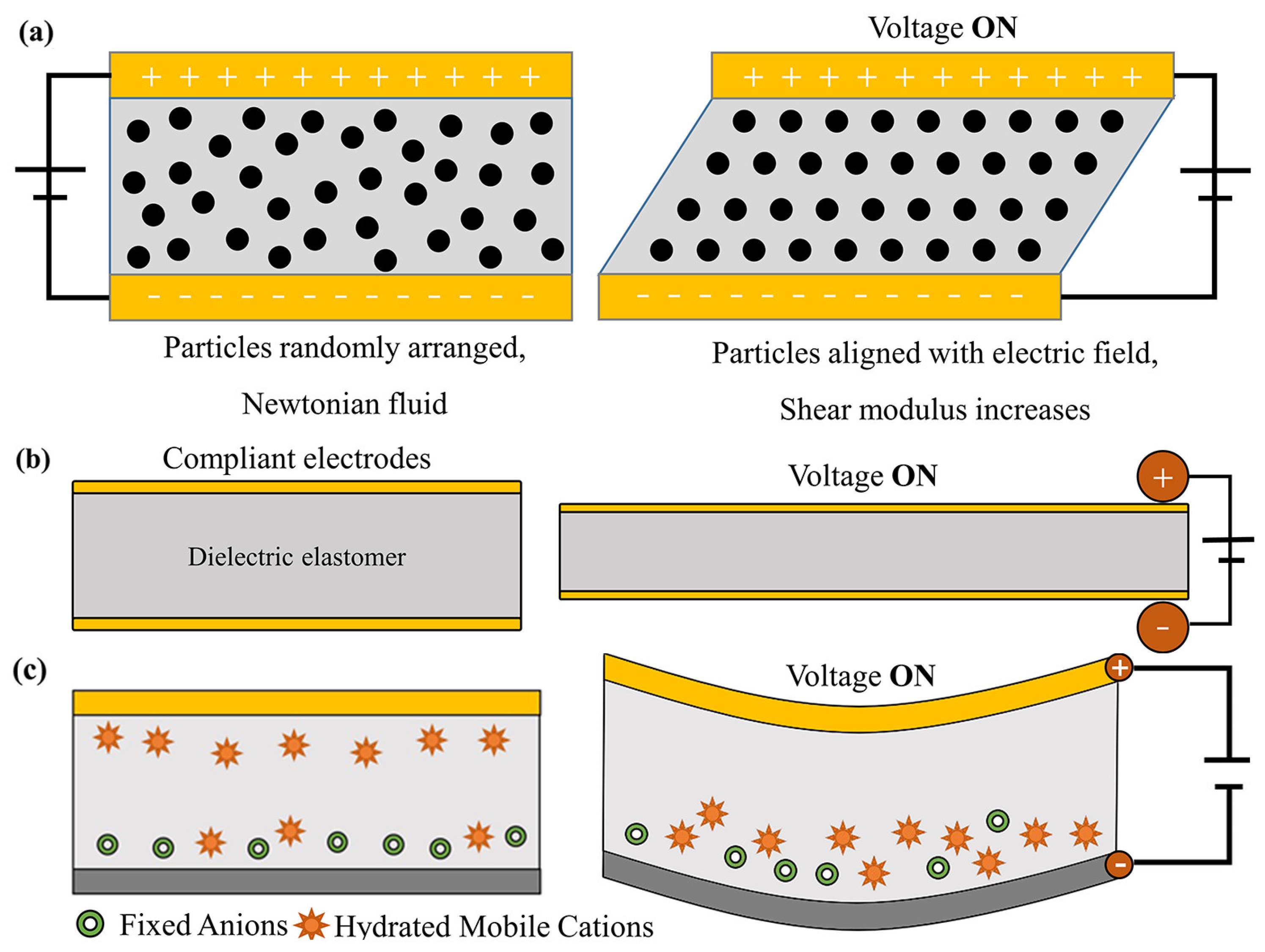
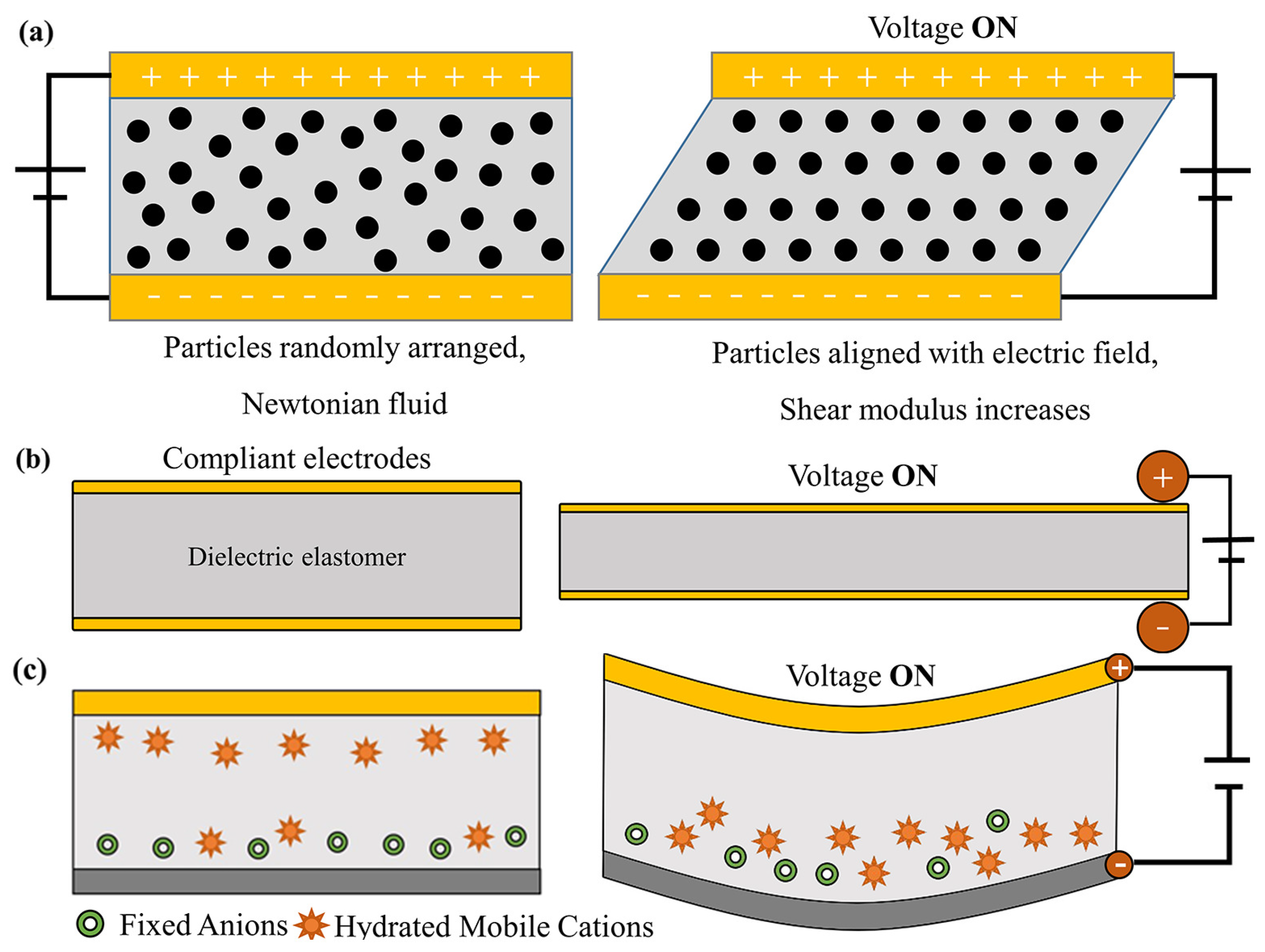
2.3. Electric Actuation
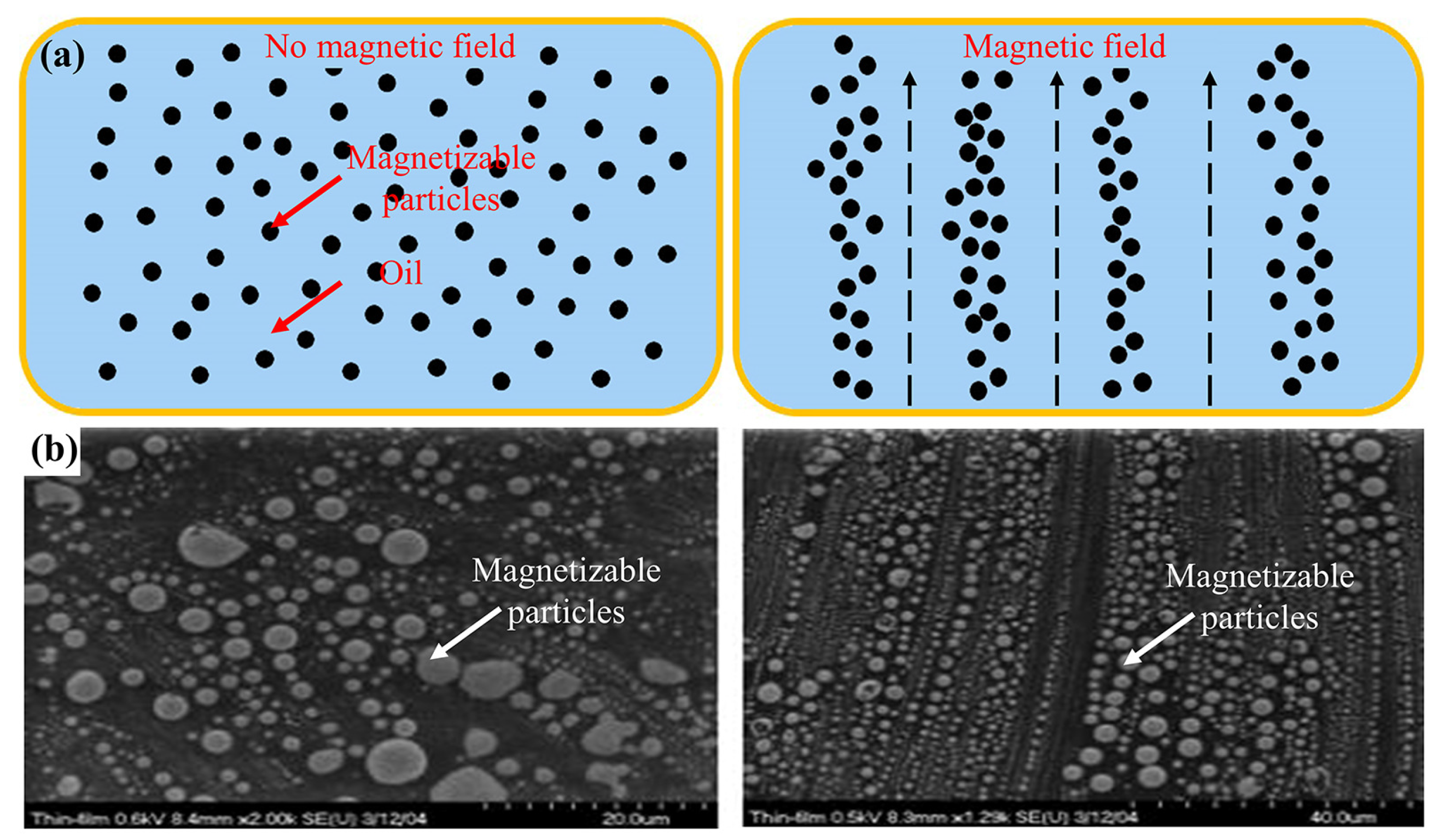
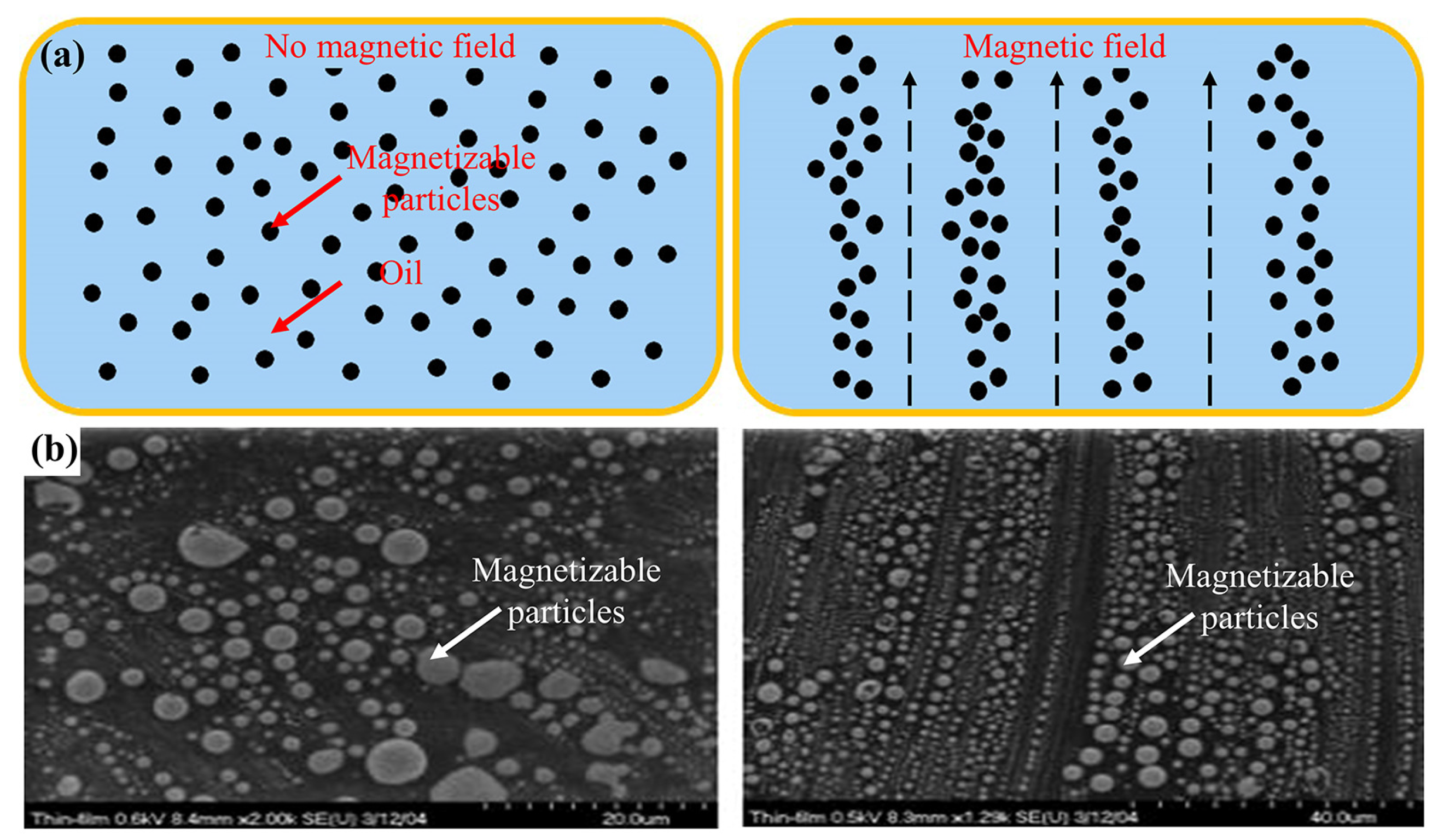
2.4. Magnetic Actuation
2.5. Light Actuation
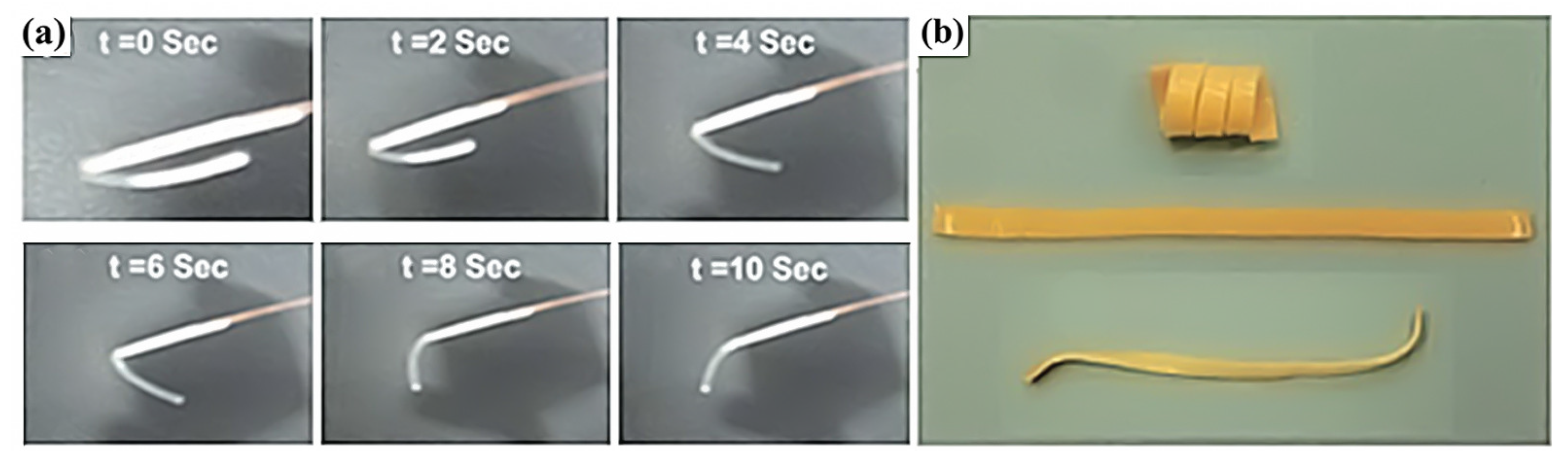
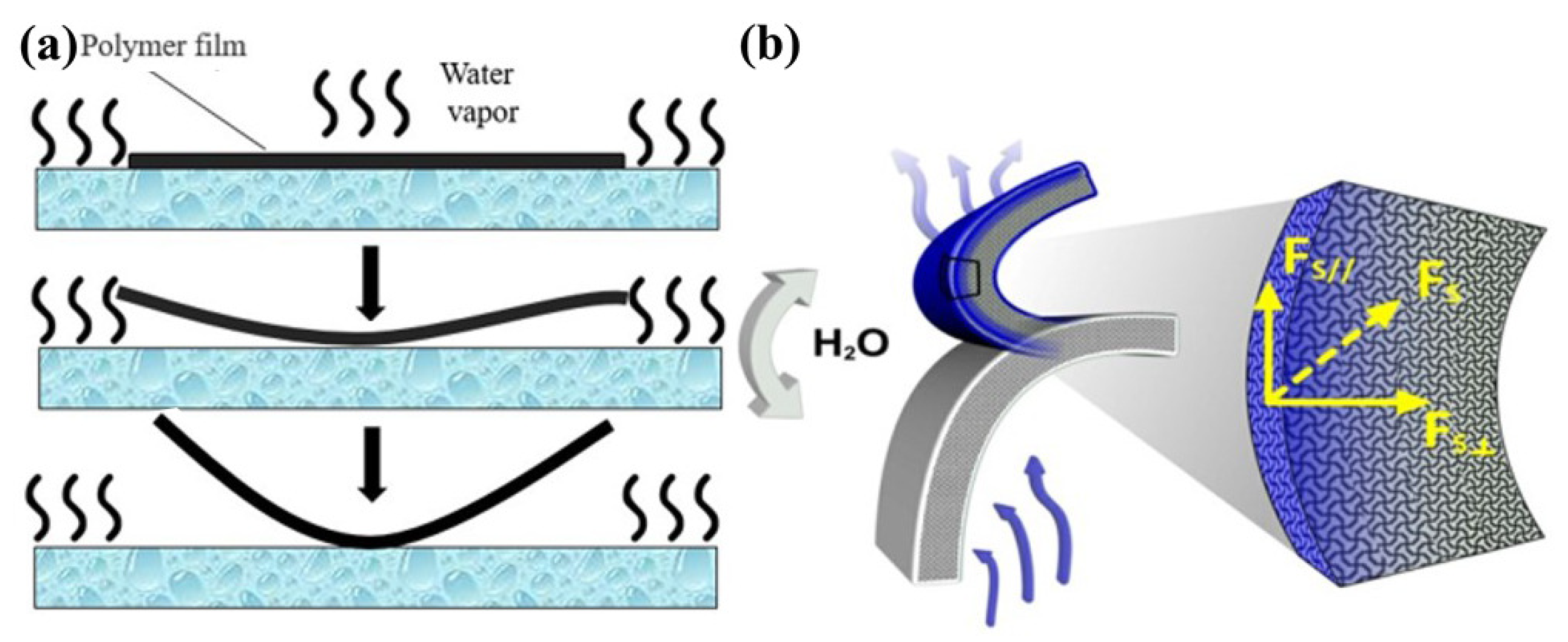
2.6. Humidity Actuation
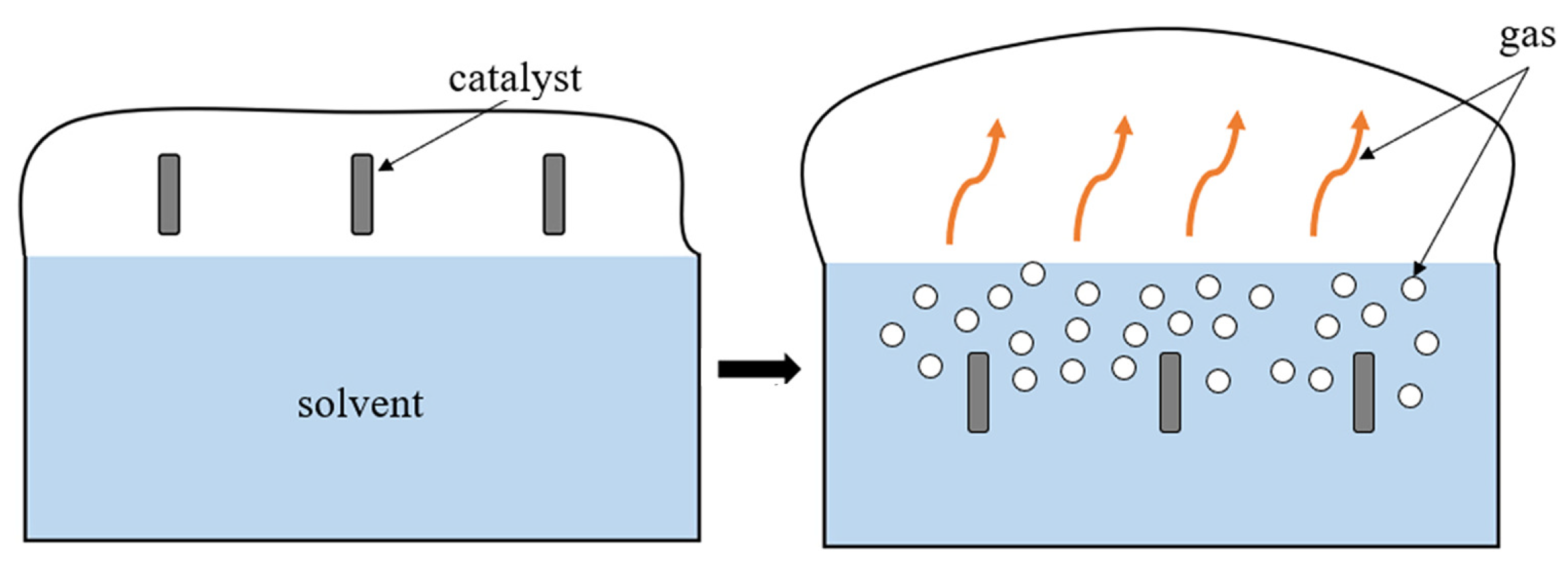
2.7. Chemical Actuation
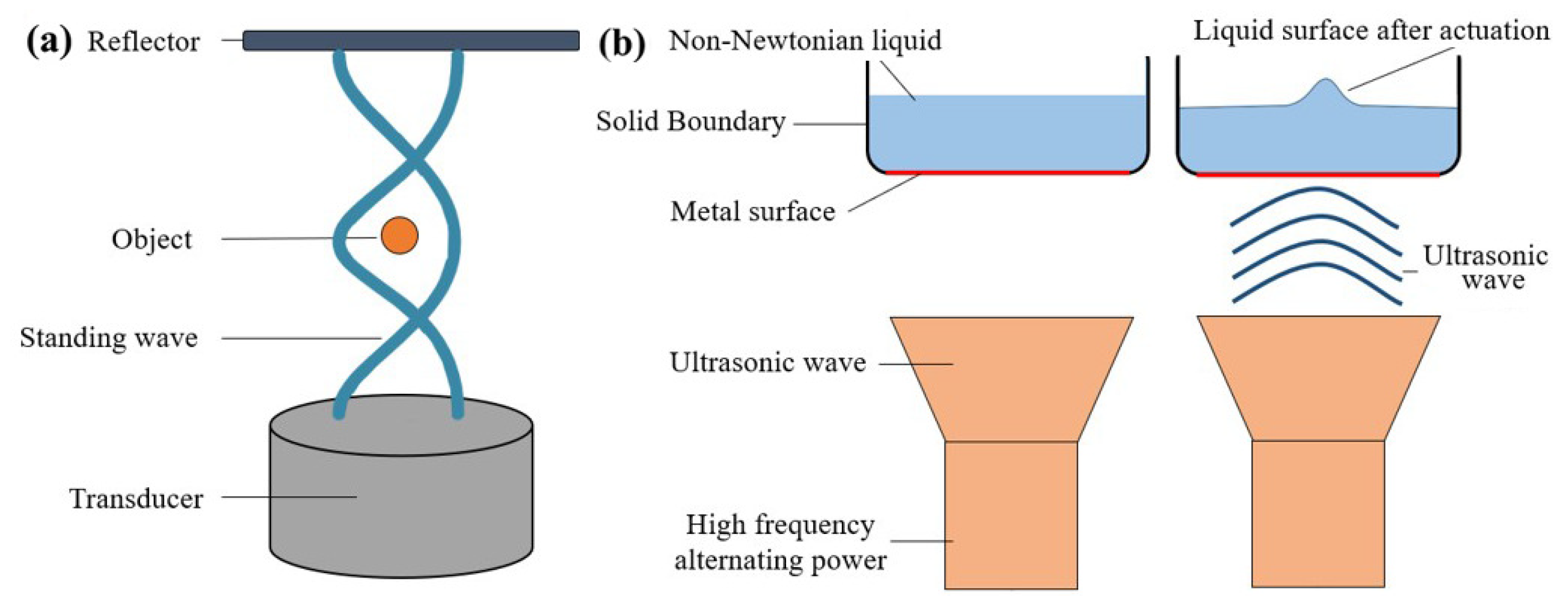
2.8. Acoustic Actuation
3. Design
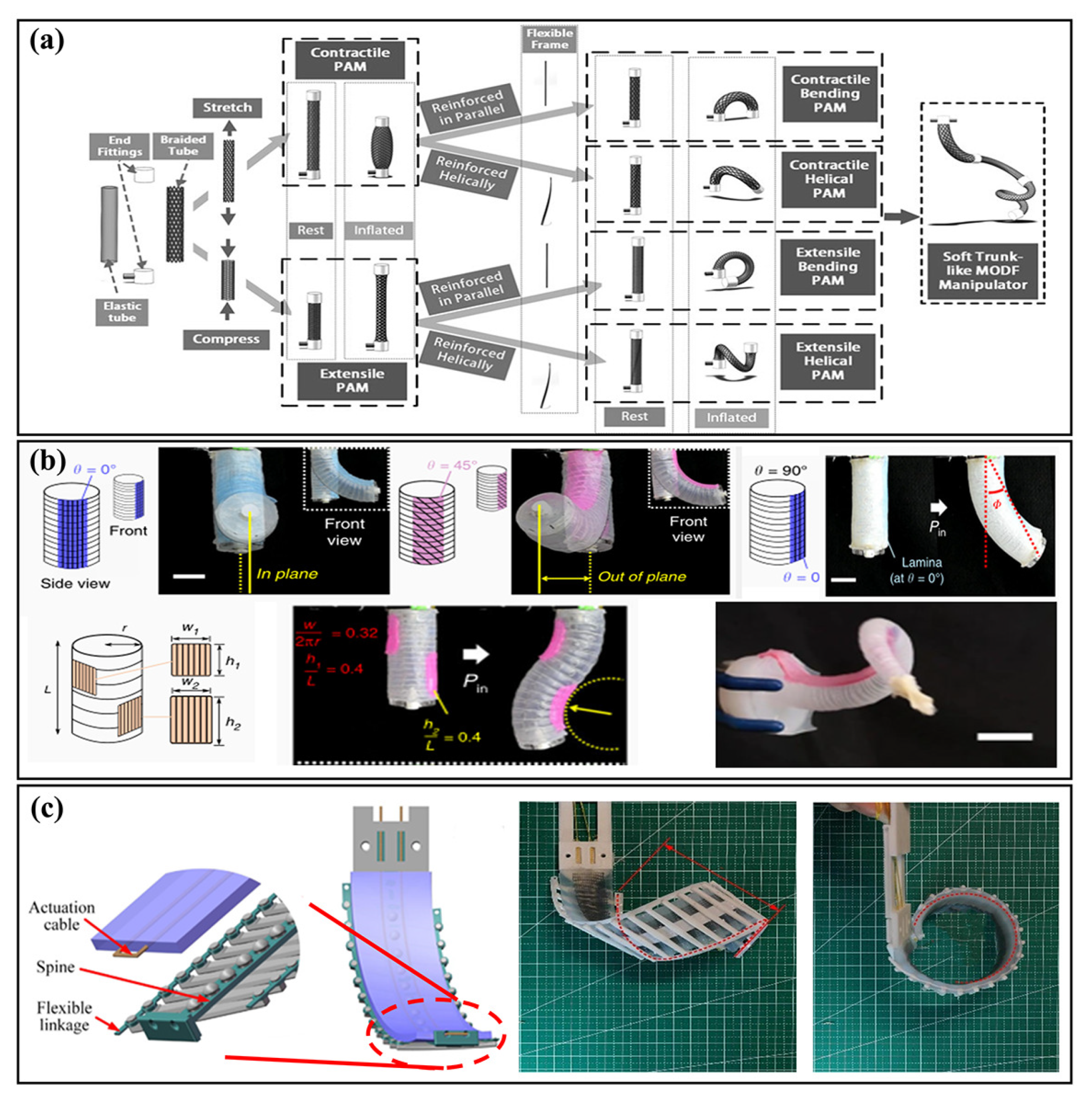
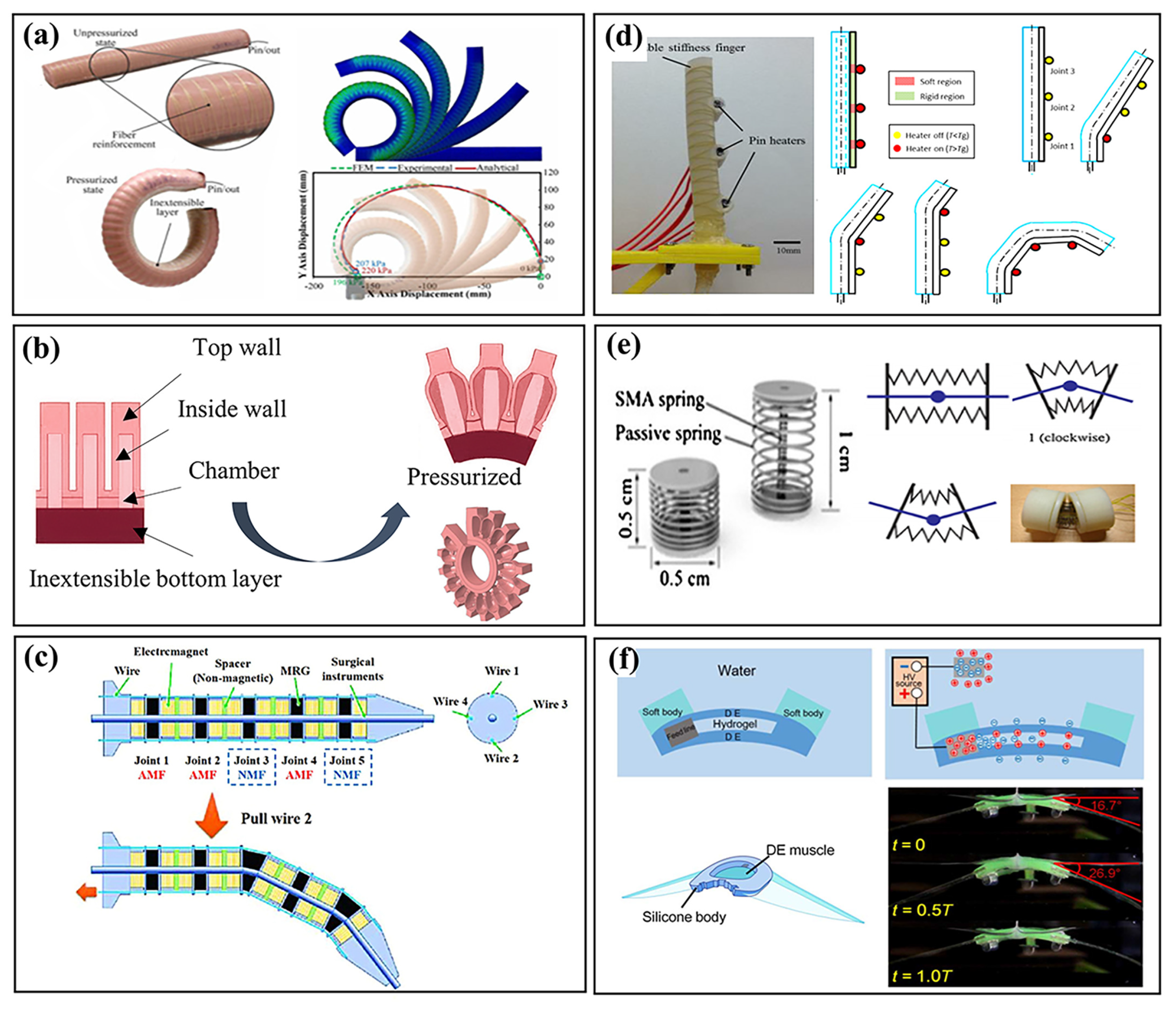
3.1. Bending Motion
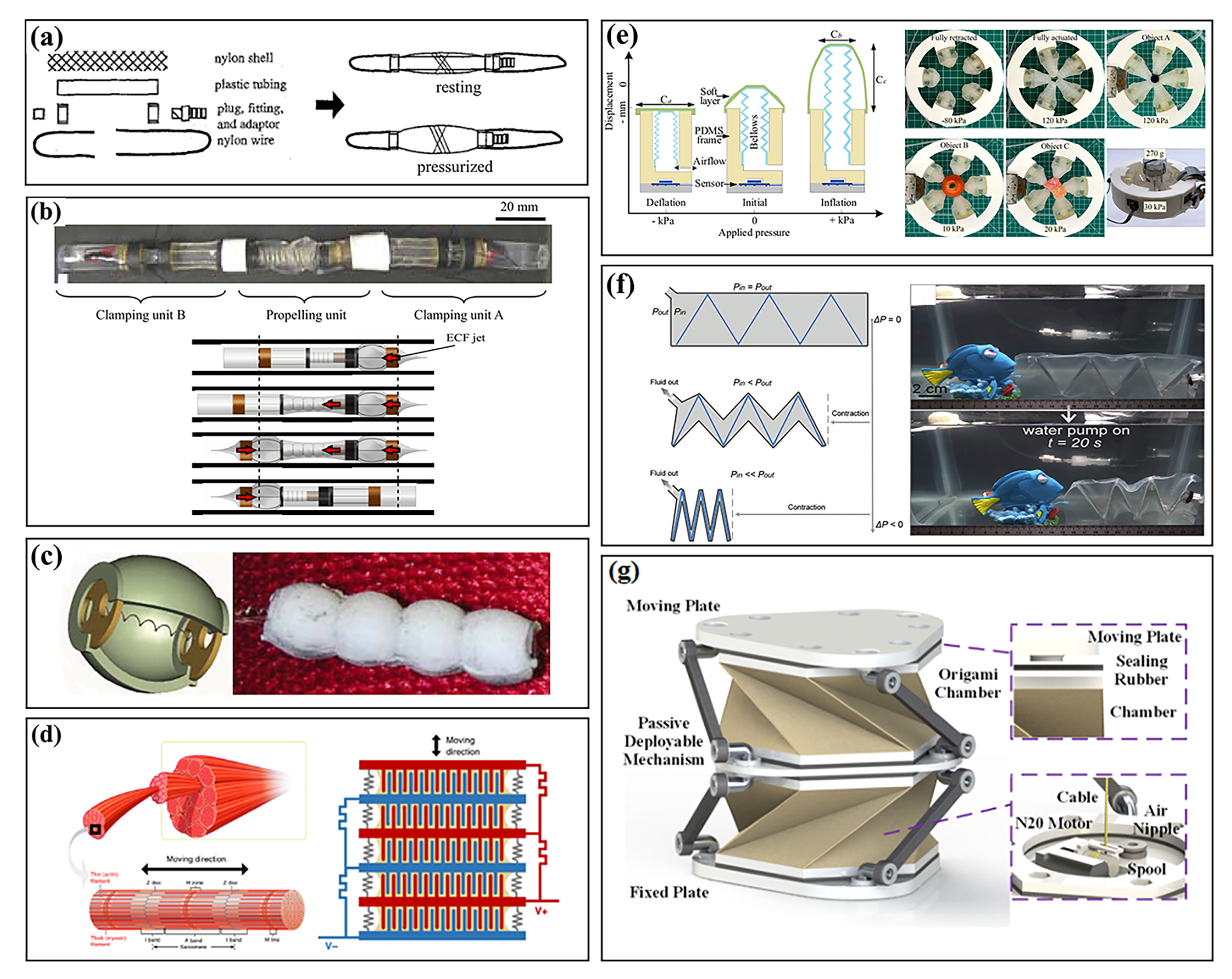
3.2. Linear Motion
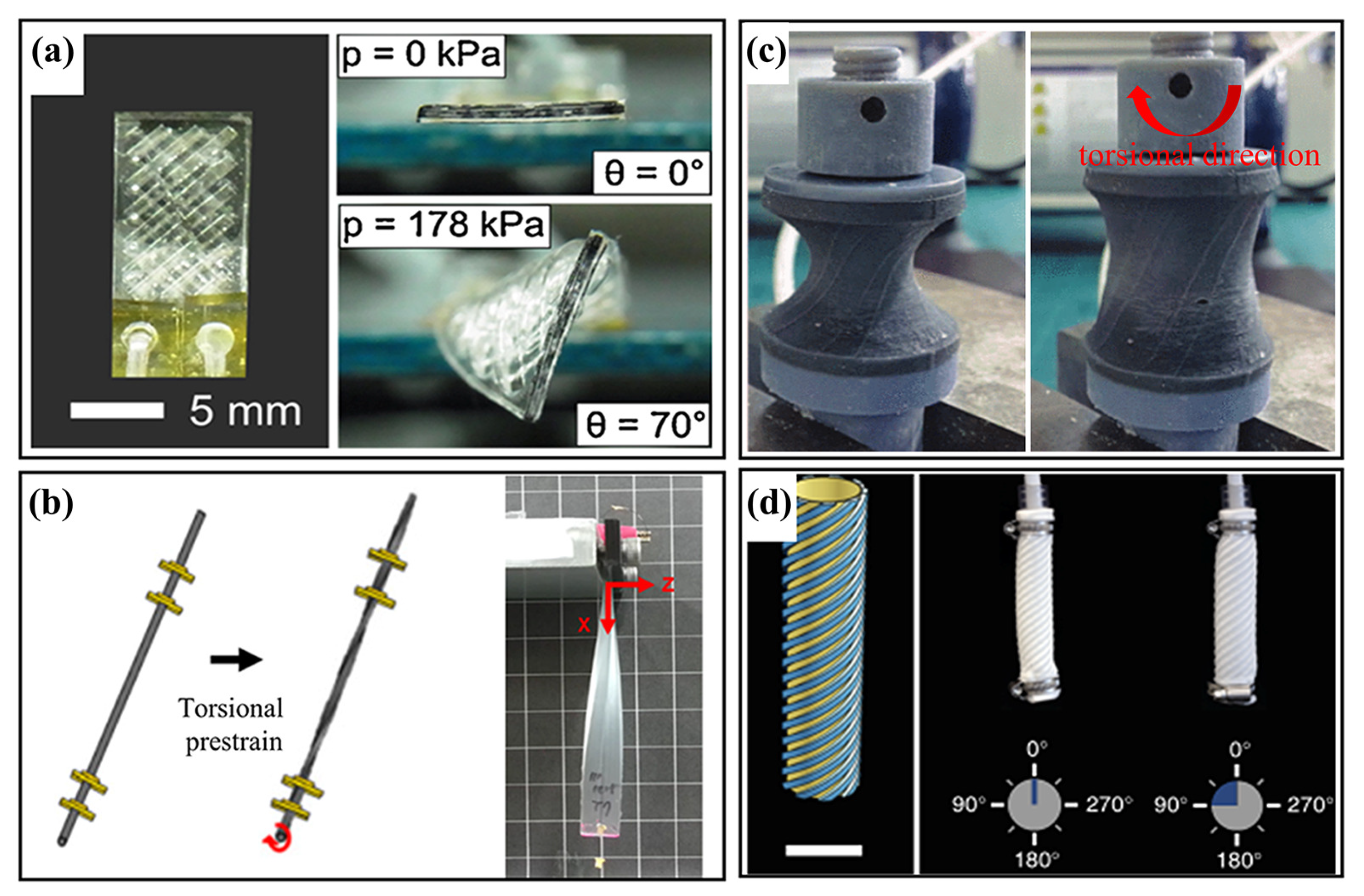
3.3. Torsional Motion

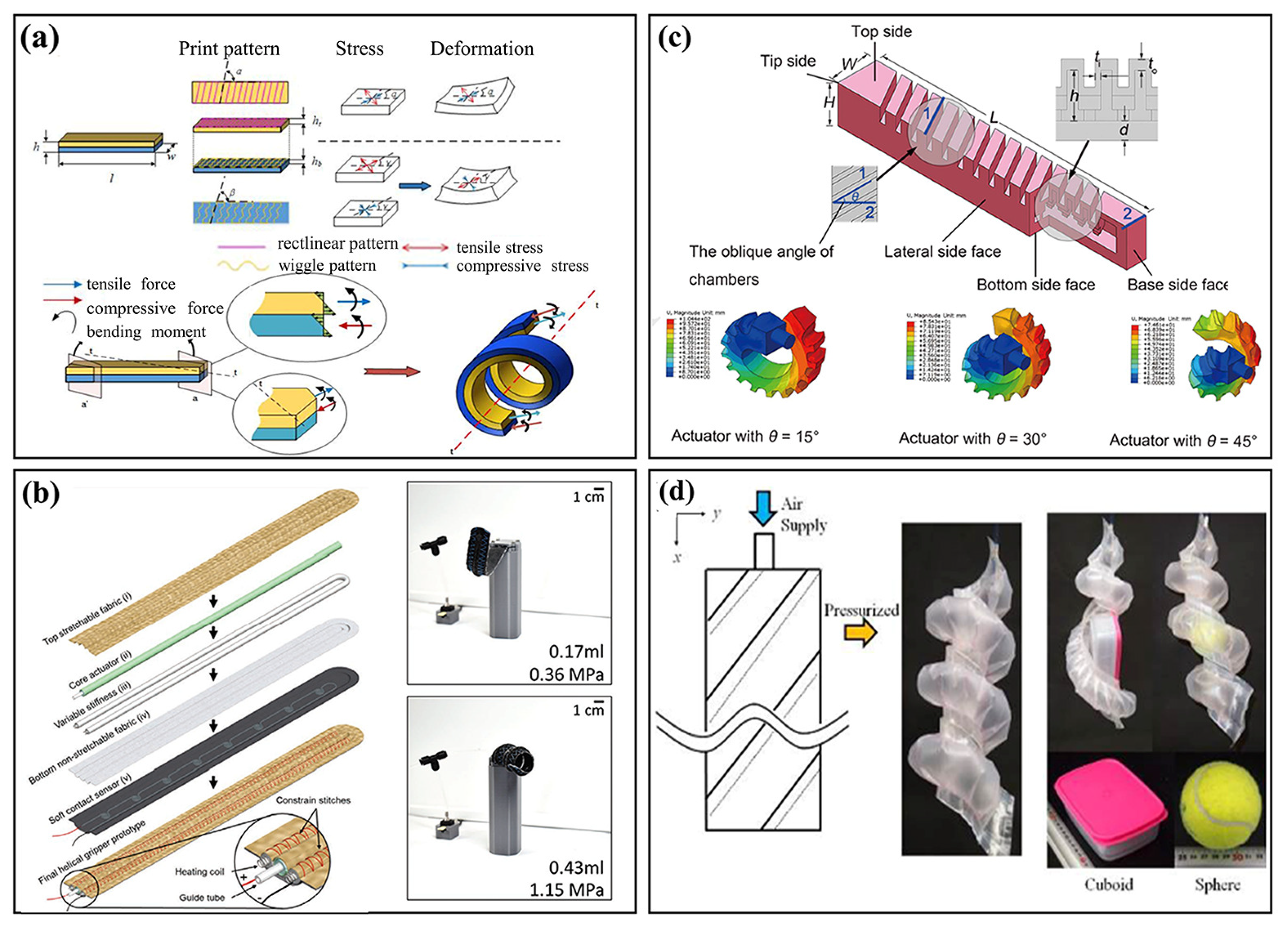
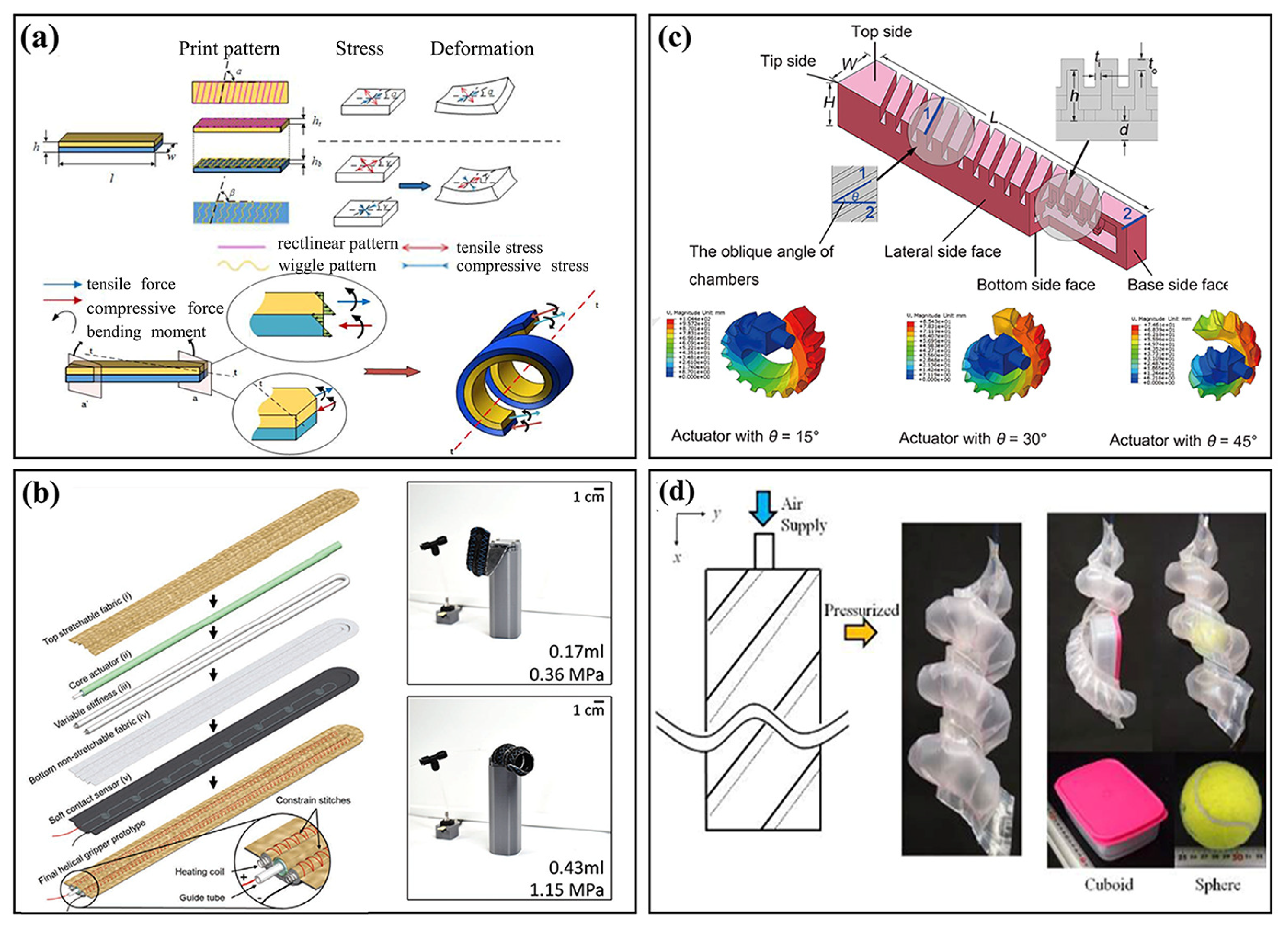
3.4. Spiral Motion
3.5. Composite Motions
4. Manufacturing
4.1. Shape Deposition Manufacturing

4.2. Three-Dimensional Printing
4.3. Micro-Powder Injection Molding
4.4. Soft Lithography
5. Applications
5.1. Wearable Devices
5.2. Exploration and Rescue
5.3. Industrial Field
6. Conclusions and Prospectives
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Brown, E.; Rodenberg, N.; Amend, J.; Mozeika, A.; Steltz, E.; Zakin, M.R.; Lipson, H.; Jaeger, H.M. Universal robotic gripper based on the jamming of granular material. Proc. Natl. Acad. Sci. USA 2010, 107, 18809–18814. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Chen, Y. Innovative Design of Embedded Pressure and Position Sensors for Soft Actuators. IEEE Robot. Autom. Lett. 2018, 3, 656–663. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, Y.; Li, Y.; Wang, Z.; Li, Y. Novel Variable-Stiffness Robotic Fingers with Built-In Position Feedback. Soft Robot. 2017, 4, 338–352. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.J.; Cheng, S.; Kim, S.; Iagnemma, K. A novel layer jamming mechanism with tunable stiffness capability for minimally invasive surgery. IEEE Trans. Robot. 2013, 29, 1031–1042. [Google Scholar] [CrossRef]
- Dogangil, G.; Davies, B.L.; Baena, F.R. A review of medical robotics for minimally invasive soft tissue surgery. Proc. Inst. Mech. Eng. Part J. Eng. Med. 2010, 224, 653–679. [Google Scholar] [CrossRef]
- Degani, A.; Choset, H.; Wolf, A.; Zenati, M. Highly articulated robotic probe for minimally invasive surgery. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, ICRA, Orlando, FL, USA, 15–19 May 2006; pp. 4167–4172. [Google Scholar] [CrossRef] [Green Version]
- Gao, X.; Sozumert, E.; Zhao, W.W.; Shi, Z.J.; Silberschmidt, V.V. 2-Deformation and fracture behaviors of long-fiber hydrogels. In The Mechanics of Hydrogels; Li, H., Silberschmidt, V., Eds.; Elsevier Series in Mechanics of Advanced Materials; Woodhead Publishing: Sawston, UK, 2022; pp. 25–40. [Google Scholar] [CrossRef]
- Zhang, C.; Zhu, P.; Lin, Y.; Tang, W.; Jiao, Z.; Yang, H.; Zou, J. Fluid-driven artificial muscles: Bio-design, manufacturing, sensing, control, and applications. Bio Des. Manuf. 2021, 4, 123–145. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Ren, T.; Choi, S.H. Precharged pneumatic soft actuators and their applications to untethered soft robots. Soft Robot. 2018, 5, 567–575. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Chen, Y.; Li, Y. Pre-charged pneumatic soft gripper with closed-loop control. IEEE Robot. Autom. Lett. 2019, 4, 1402–1408. [Google Scholar] [CrossRef]
- Cui, Y.; Liu, X.J.; Dong, X.; Zhou, J.; Zhao, H. Enhancing the Universality of a Pneumatic Gripper via Continuously Adjustable Initial Grasp Postures. IEEE Trans. Robot. 2021, 37, 1604–1618. [Google Scholar] [CrossRef]
- Ranzani, T.; Gerboni, G.; Cianchetti, M.; Menciassi, A. A bioinspired soft manipulator for minimally invasive surgery. Bioinspiration Biomim. 2015, 10, 035008. [Google Scholar] [CrossRef]
- Ren, T.; Li, Y.; Xu, M.; Li, Y.; Xiong, C.; Chen, Y. A Novel Tendon-Driven Soft Actuator with Self-Pumping Property. Soft Robot. 2020, 7, 130–139. [Google Scholar] [CrossRef] [PubMed]
- Shan, W.; Diller, S.; Tutcuoglu, A.; Majidi, C. Rigidity-tuning conductive elastomer. Smart Mater. Struct. 2015, 24, 065001. [Google Scholar] [CrossRef] [Green Version]
- Rich, S.; Jang, S.H.; Park, Y.L.; Majidi, C. Liquid metal-conductive thermoplastic elastomer integration for low-voltage stiffness tuning. Adv. Mater. Technol. 2017, 2, 1700179. [Google Scholar] [CrossRef]
- Nasab, A.M.; Sabzehzar, A.; Tatari, M.; Majidi, C.; Shan, W. A soft gripper with rigidity tunable elastomer strips as ligaments. Soft Robot. 2017, 4, 411–420. [Google Scholar] [CrossRef]
- Cheng, N.G.; Gopinath, A.; Wang, L.; Iagnemma, K.; Hosoi, A.E. Thermally tunable, self-healing composites for soft robotic applications. Macromol. Mater. Eng. 2014, 299, 1279–1284. [Google Scholar] [CrossRef]
- Wang, Q.; Tian, X.; Li, D. Multimodal soft jumping robot with self-decision ability. Smart Mater. Struct. 2021, 30, 085038. [Google Scholar] [CrossRef]
- Yuan, X.; Zhou, X.; Liang, Y.; Wang, L.; Chen, R.; Zhang, M.; Pu, H.; Xuan, S.; Wu, J.; Wen, W. A stable high-performance isotropic electrorheological elastomer towards controllable and reversible circular motion. Compos. Part B Eng. 2020, 193, 107988. [Google Scholar] [CrossRef]
- Yin, L.J.; Zhao, Y.; Zhu, J.; Yang, M.; Zhao, H.; Pei, J.Y.; Zhong, S.L.; Dang, Z.M. Soft, tough, and fast polyacrylate dielectric elastomer for non-magnetic motor. Nat. Commun. 2021, 12, 4517. [Google Scholar] [CrossRef]
- Dang, Z.m.; Wang, L.; Wang, H.y. Novel smart materials: Progress in electroactive polymers. J. Funct. Mater. 2005, 36, 981. [Google Scholar]
- Lai, W.; Bastawros, A.F.; Hong, W.; Chung, S.J. Fabrication and analysis of planar dielectric elastomer actuators capable of complex 3-D deformation. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 4968–4973. [Google Scholar]
- Su, Y.; Ye, X.; Guo, S. An autonomous micro robot fish based on IPMC actuator. Robot 2010, 32, 262–270. [Google Scholar] [CrossRef]
- Somlor, S.; Dominguez, G.A.; Schmitz, A.; Kamezaki, M.; Sugano, S. A haptic interface with adjustable stiffness using MR fluid. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Korea, 7–11 July 2015; pp. 1132–1137. [Google Scholar]
- Guðmundsson, Í. A feasibility study of magnetorheological elastomers for a potential application in prosthetic devices. Ph.D. Thesis, University of Iceland, Reykjavík, Iceland, 2011. [Google Scholar]
- Shembekar, S.; Kamezaki, M.; Zhang, P.; He, Z.; Tsunoda, R.; Otsuki, K.; Sakamoto, H.; Sugano, S. Preliminary Development of a Powerful and Backdrivable Robot Gripper Using Magnetorheological Fluid. In Proceedings of the ISARC—International Symposium on Automation and Robotics in Construction, Kitakyshu, Japan, 27–28 October 2020; Volume 37, pp. 1458–1463. [Google Scholar]
- Kashima, S.; Miyasaka, F.; Hirata, K. Novel soft actuator using magnetorheological elastomer. IEEE Trans. Magn. 2012, 48, 1649–1652. [Google Scholar] [CrossRef]
- Hribar, K.C.; Metter, R.B.; Ifkovits, J.L.; Troxler, T.; Burdick, J.A. Light-induced temperature transitions in biodegradable polymer and nanorod composites. Small 2009, 5, 1830–1834. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sugiura, S.; Sumaru, K.; Ohi, K.; Hiroki, K.; Takagi, T.; Kanamori, T. Photoresponsive polymer gel microvalves controlled by local light irradiation. Sens. Actuators Phys. 2007, 140, 176–184. [Google Scholar] [CrossRef]
- Rogóż, M.; Zeng, H.; Xuan, C.; Wiersma, D.S.; Wasylczyk, P. Light-driven soft robot mimics caterpillar locomotion in natural scale. Adv. Opt. Mater. 2016, 4, 1689–1694. [Google Scholar] [CrossRef]
- Habibi, Y.; Lucia, L.A.; Rojas, O.J. Cellulose nanocrystals: Chemistry, self-assembly, and applications. Chem. Rev. 2010, 110, 3479–3500. [Google Scholar] [CrossRef] [PubMed]
- Okuzaki, H.; Kuwabara, T.; Kunugi, T. Theoretical study of sorption-induced bending of polypyrrole films. J. Polym. Sci. Part Polym. Phys. 1998, 36, 2237–2246. [Google Scholar] [CrossRef]
- Sidorenko, A.; Krupenkin, T.; Taylor, A.; Fratzl, P.; Aizenberg, J. Reversible switching of hydrogel-actuated nanostructures into complex micropatterns. Science 2007, 315, 487–490. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Liang, H.; Jacob, J.; Naumov, P. Erratum: Photogated humidity-driven motility. Nat. Commun. 2015, 6, 7862. [Google Scholar] [CrossRef] [Green Version]
- Maeda, S.; Hara, Y.; Yoshida, R.; Hashimoto, S. Self-oscillating gel actuator for chemical robotics. Adv. Robot. 2008, 22, 1329–1342. [Google Scholar] [CrossRef]
- Foresti, D.; Nabavi, M.; Klingauf, M.; Ferrari, A.; Poulikakos, D. Acoustophoretic contactless transport and handling of matter in air. Proc. Natl. Acad. Sci. USA 2013, 110, 12549–12554. [Google Scholar] [CrossRef] [Green Version]
- Ding, X.; Lin, S.C.S.; Kiraly, B.; Yue, H.; Li, S.; Chiang, I.K.; Shi, J.; Benkovic, S.J.; Huang, T.J. On-chip manipulation of single microparticles, cells, and organisms using surface acoustic waves. Proc. Natl. Acad. Sci. USA 2012, 109, 11105–11109. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Laurell, T.; Petersson, F.; Nilsson, A. Chip integrated strategies for acoustic separation and manipulation of cells and particles. Chem. Soc. Rev. 2007, 36, 492–506. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Yang, D.; Yan, P.; Zhou, P.; Zou, J.; Gu, G. Inchworm Inspired Multimodal Soft Robots With Crawling, Climbing, and Transitioning Locomotion. IEEE Trans. Robot. 2021, 38, 1806–1819. [Google Scholar] [CrossRef]
- Yoshida, S.; Morimoto, Y.; Zheng, L.; Onoe, H.; Takeuchi, S. Multipoint bending and shape retention of a pneumatic bending actuator by a variable stiffness endoskeleton. Soft Robot. 2018, 5, 718–725. [Google Scholar] [CrossRef] [PubMed]
- Yoshida, K.T.; Ren, X.; Blumenschein, L.H.; Okamura, A.M.; Luo, M. AFREEs: Active Fiber Reinforced Elastomeric Enclosures. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 305–311. [Google Scholar]
- Yang, B.; Baines, R.; Shah, D.; Patiballa, S.; Thomas, E.; Venkadesan, M.; Kramer-Bottiglio, R. Reprogrammable soft actuation and shape-shifting via tensile jamming. Sci. Adv. 2021, 7, eabh2073. [Google Scholar] [CrossRef]
- Cui, J.; Huang, T.Y.; Luo, Z.; Testa, P.; Gu, H.; Chen, X.Z.; Nelson, B.J.; Heyderman, L.J. Nanomagnetic encoding of shape-morphing micromachines. Nature 2019, 575, 164–168. [Google Scholar] [CrossRef]
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.F.; Chen, X.; Whitesides, G.M. Soft robotics for chemists. Angew. Chem. 2011, 123, 1930–1935. [Google Scholar] [CrossRef]
- Lotfiani, A.; Yi, X.; Qinzhi, Z.; Shao, Z.; Wang, L. Design and Experiment of a Fast-Soft Pneumatic Actuator with High Output Force. In Proceedings of the International Conference on Intelligent Robotics and Applications, Newcastle, NSW, Australia, 9–11 August 2018; pp. 442–452. [Google Scholar]
- Marchese, A.D.; Katzschmann, R.K.; Rus, D. A recipe for soft fluidic elastomer robots. Soft Robot. 2015, 2, 7–25. [Google Scholar] [CrossRef] [Green Version]
- Gong, X.; Yang, K.; Xie, J.; Wang, Y.; Kulkarni, P.; Hobbs, A.S.; Mazzeo, A.D. Rotary actuators based on pneumatically driven elastomeric structures. Adv. Mater. 2016, 28, 7533–7538. [Google Scholar] [CrossRef]
- Nakai, H.; Kuniyoshi, Y.; Inaba, M.; Inoue, H. Metamorphic robot made of low melting point alloy. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 2, pp. 2025–2030. [Google Scholar]
- Shintake, J.; Schubert, B.; Rosset, S.; Shea, H.; Floreano, D. Variable stiffness actuator for soft robotics using dielectric elastomer and low-melting-point alloy. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1097–1102. [Google Scholar]
- Yang, Y.; Tse, Y.A.; Zhang, Y.; Kan, Z.; Wang, M.Y. A Low-cost Inchworm-inspired Soft Robot Driven by Supercoiled Polymer Artificial Muscle. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 161–166. [Google Scholar] [CrossRef]
- Shaw, J.A.; Kyriakides, S. Thermomechanical aspects of NiTi. J. Mech. Phys. Solids 1995, 43, 1243–1281. [Google Scholar] [CrossRef]
- Kim, B.; Lee, M.G.; Lee, Y.P.; Kim, Y.; Lee, G. An earthworm-like micro robot using shape memory alloy actuator. Sens. Actuators Phys. 2006, 125, 429–437. [Google Scholar] [CrossRef]
- Chang, B.C.; Shaw, J.A.; Iadicola, M.A. Thermodynamics of shape memory alloy wire: Modeling, experiments, and application. Contin. Mech. Thermodyn. 2006, 18, 83–118. [Google Scholar] [CrossRef]
- Liu, C.; Qin, H.; Mather, P. Review of progress in shape-memory polymers. J. Mater. Chem. 2007, 17, 1543–1558. [Google Scholar] [CrossRef]
- Firouzeh, A.; Salerno, M.; Paik, J. Stiffness control with shape memory polymer in underactuated robotic origamis. IEEE Trans. Robot. 2017, 33, 765–777. [Google Scholar] [CrossRef]
- Mailen, R.W.; Wagner, C.H.; Bang, R.S.; Zikry, M.; Dickey, M.D.; Genzer, J. Thermo-mechanical transformation of shape memory polymers from initially flat discs to bowls and saddles. Smart Mater. Struct. 2019, 28, 045011. [Google Scholar] [CrossRef]
- Wu, S.; Baker, G.L.; Yin, J.; Zhu, Y. Fast Thermal Actuators for Soft Robotics. Soft Robot. 2021, 5, 513–527. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, Y. 3D printing of smart materials for robotics with variable stiffness and position feedback. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 418–423. [Google Scholar] [CrossRef]
- Mäkelä, K.K. Characterization and performance of electrorheological fluids based on pine oils. J. Intell. Mater. Syst. Struct. 1999, 10, 609–614. [Google Scholar] [CrossRef]
- Sadeghi, A.; Beccai, L.; Mazzolai, B. Innovative soft robots based on electro-rheological fluids. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 4237–4242. [Google Scholar]
- Zhu, F.B.; Zhang, C.L.; Qian, J.; Chen, W.Q. Mechanics of dielectric elastomers: Materials, structures, and devices. J. Zhejiang Univ. Sci. A 2016, 17, 1–21. [Google Scholar]
- Cao, C.; Chen, L.; Hill, T.L.; Wang, L.; Gao, X. Exploiting Bistability for High-Performance Dielectric Elastomer Resonators. IEEE/ASME Trans. Mechatron. 2022, 15, 1–12. [Google Scholar] [CrossRef]
- Kellaris, N.; Gopaluni Venkata, V.; Smith, G.M.; Mitchell, S.K.; Keplinger, C. Peano-HASEL actuators: Muscle-mimetic, electrohydraulic transducers that linearly contract on activation. Sci. Robot. 2018, 3, eaar3276. [Google Scholar] [CrossRef] [Green Version]
- Bahramzadeh, Y.; Shahinpoor, M. A review of ionic polymeric soft actuators and sensors. Soft Robot. 2014, 1, 38–52. [Google Scholar] [CrossRef]
- Fujita, T.; Shimada, K. Characteristics and applications of magnetorheological fluids. J. Magn. Soc. Jpn. 2003, 27, 91–100. [Google Scholar]
- Wang, X.; Gordaninejad, F.; Calgar, M.; Liu, Y.; Sutrisno, J.; Fuchs, A. Sensing behavior of magnetorheological elastomers. J. Mech. Des. 2009, 131, 091004. [Google Scholar] [CrossRef]
- Hiraki, T.; Nakahara, K.; Narumi, K.; Niiyama, R.; Kida, N.; Takamura, N.; Okamoto, H.; Kawahara, Y. Laser pouch motors: Selective and wireless activation of soft actuators by laser-powered liquid-to-gas phase change. IEEE Robot. Autom. Lett. 2020, 5, 4180–4187. [Google Scholar] [CrossRef]
- Lendlein, A.; Jiang, H.; Jünger, O.; Langer, R. Light-induced shape-memory polymers. Nature 2005, 434, 879–882. [Google Scholar] [CrossRef]
- Ma, M.; Guo, L.; Anderson, D.G.; Langer, R. Bio-inspired polymer composite actuator and generator driven by water gradients. Science 2013, 339, 186–189. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Geissler, A.; Standhardt, M.; Mehlhase, S.; Gallei, M.; Chen, L.; Thiele, C.M. Moisture-responsive films of cellulose stearoyl esters showing reversible shape transitions. Sci. Rep. 2015, 5, 11011. [Google Scholar] [CrossRef] [Green Version]
- Bartlett, N.W.; Tolley, M.T.; Overvelde, J.T.; Weaver, J.C.; Mosadegh, B.; Bertoldi, K.; Whitesides, G.M.; Wood, R.J. A 3D-printed, functionally graded soft robot powered by combustion. Science 2015, 349, 161–165. [Google Scholar] [CrossRef] [Green Version]
- Onal, C.D.; Chen, X.; Whitesides, G.M.; Rus, D. Soft mobile robots with on-board chemical pressure generation. In Robotics Research; Springer: Cham, Switzerland, 2017; pp. 525–540. [Google Scholar]
- Whymark, R. Acoustic field positioning for containerless processing. Ultrasonics 1975, 13, 251–261. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Y.; Chen, Y. Principles and methods for stiffness modulation in soft robot design and development. Bio Des. Manuf. 2018, 1, 14–25. [Google Scholar] [CrossRef]
- Wang, Z.; Polygerinos, P.; Overvelde, J.T.; Galloway, K.C.; Bertoldi, K.; Walsh, C.J. Interaction forces of soft fiber reinforced bending actuators. IEEE/ASME Trans. Mechatronics 2016, 22, 717–727. [Google Scholar] [CrossRef]
- Galloway, K.C.; Polygerinos, P.; Walsh, C.J.; Wood, R.J. Mechanically programmable bend radius for fiber-reinforced soft actuators. In Proceedings of the 2013 16th International Conference on Advanced Robotics (ICAR), Montevideo, Uruguay, 25–29 November 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Ye, Y.; Cheng, P.; Yan, B.; Lu, Y.; Wu, C. Design of a Novel Soft Pneumatic Gripper with Variable Gripping Size and Mode. J. Intell. Robot. Syst. 2022, 106, 5. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic Networks for Soft Robotics that Actuate Rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef] [Green Version]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef] [Green Version]
- Kim, W.; Seo, B.; Yu, S.Y.; Cho, K.J. Deployable Soft Pneumatic Networks (D-PneuNets) Actuator with Dual-Morphing Origami Chambers for High-Compactness. IEEE Robot. Autom. Lett. 2022, 7, 1262–1269. [Google Scholar] [CrossRef]
- Kitano, S.; Komatsuzaki, T.; Suzuki, I.; Nogawa, M.; Naito, H.; Tanaka, S. Development of a rigidity tunable flexible joint using magneto-rheological compounds—Toward a multijoint manipulator for laparoscopic surgery. Front. Robot. AI 2020, 7, 59. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, Y. Novel design and 3D printing of variable stiffness robotic fingers based on shape memory polymer. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 195–200. [Google Scholar]
- Yuk, H.; Kim, D.; Lee, H.; Jo, S.; Shin, J.H. Shape memory alloy-based small crawling robots inspired by C. elegans. Bioinspiration Biomim. 2011, 6, 046002. [Google Scholar] [CrossRef]
- Li, T.; Li, G.; Liang, Y.; Cheng, T.; Dai, J.; Yang, X.; Liu, B.; Zeng, Z.; Huang, Z.; Luo, Y.; et al. Fast-moving soft electronic fish. Sci. Adv. 2017, 3, e1602045. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Chen, Y.; Li, Y.; Chen, M.Z.; Wei, Y. Bioinspired Robotic Fingers Based on Pneumatic Actuator and 3D Printing of Smart Material. Soft Robot. 2017, 4, 147–162. [Google Scholar] [CrossRef]
- Zhang, X.; Yu, Z.; Wang, C.; Zarrouk, D.; Seo, J.W.; Cheng, J.; Buchan, A.; Takei, K.; Zhao, Y.; Ager, J.; et al. Photoactuators and motors based on carbon nanotubes with selective chirality distributions. Nat. Commun. 2014, 5, 2983. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gavrilović, M.M.; Maríc, M.R. Positional servo-mechanism activated by artificial muscles. Med. Biol. Eng. 1969, 7, 77–82. [Google Scholar] [CrossRef] [PubMed]
- Yamaguchi, A.; Takemura, K.; Yokota, S.; Edamura, K. An in-pipe mobile robot using electro-conjugate fluid. J. Adv. Mech. Des. Syst. Manuf. 2011, 5, 214–226. [Google Scholar] [CrossRef] [Green Version]
- Menciassi, A.; Gorini, S.; Pernorio, G.; Dario, P. A SMA actuated artificial earthworm. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA’04, New Orleans, LA, USA, 26 April–1 May 2004; Volume 4, pp. 3282–3287. [Google Scholar]
- Ni, D.; Heisser, R.; Davaji, B.; Ivy, L.; Shepherd, R.; Lal, A. Polymer interdigitated pillar electrostatic (PIPE) actuators. Microsys. Nanoeng. 2022, 8, 1–8. [Google Scholar] [CrossRef]
- Hashem, R.; Stommel, M.; Cheng, L.; Xu, W. Design and characterization of a bellows-driven soft pneumatic actuator. IEEE/ASME Trans. Mechatron. 2020, 26, 2327–2338. [Google Scholar] [CrossRef]
- Li, S.; Vogt, D.M.; Rus, D.; Wood, R.J. Fluid-driven origami-inspired artificial muscles. Proc. Natl. Acad. Sci. USA 2017, 114, 13132–13137. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Chen, G.; Wu, H.; Kong, L.; Wang, H. A pneumatic/cable-driven hybrid linear actuator with combined structure of origami chambers and deployable mechanism. IEEE Robot. Autom. Lett. 2020, 5, 3564–3571. [Google Scholar] [CrossRef]
- Aziz, S.; Villacorta, B.; Naficy, S.; Salahuddin, B.; Gao, S.; Baigh, T.A.; Sangian, D.; Zhu, Z. A microwave powered polymeric artificial muscle. Appl. Mater. Today 2021, 23, 101021. [Google Scholar] [CrossRef]
- Gorissen, B.; Chishiro, T.; Shimomura, S.; Reynaerts, D.; De Volder, M.; Konishi, S. Flexible pneumatic twisting actuators and their application to tilting micromirrors. Sens. Actuators A Phys. 2014, 216, 426–431. [Google Scholar] [CrossRef]
- Xiao, W.; Du, X.; Chen, W.; Yang, G.; Hu, D.; Han, X. Cooperative collapse of helical structure enables the actuation of twisting pneumatic artificial muscle. Int. J. Mech. Sci. 2021, 201, 106483. [Google Scholar] [CrossRef]
- Jiao, Z.; Zhang, C.; Ruan, J.; Tang, W.; Lin, Y.; Zhu, P.; Wang, J.; Wang, W.; Yang, H.; Zou, J. Re-foldable origami-inspired bidirectional twisting of artificial muscles reproduces biological motion. Cell Rep. Phys. Sci. 2021, 2, 100407. [Google Scholar] [CrossRef]
- Shim, J.E.; Quan, Y.J.; Wang, W.; Rodrigue, H.; Song, S.H.; Ahn, S.H. A smart soft actuator using a single shape memory alloy for twisting actuation. Smart Mater. Struct. 2015, 24, 125033. [Google Scholar] [CrossRef]
- Ahn, S.H.; Lee, K.T.; Kim, H.J.; Wu, R.; Kim, J.S.; Song, S.H. Smart soft composite: An integrated 3D soft morphing structure using bend-twist coupling of anisotropic materials. Int. J. Precis. Eng. Manuf. 2012, 13, 631–634. [Google Scholar] [CrossRef]
- Lee, J.Y.; Kim, W.B.; Choi, W.Y.; Cho, K.J. Soft robotic blocks: Introducing SoBL, a fast-build modularized design block. IEEE Robot. Autom. Mag. 2016, 23, 30–41. [Google Scholar] [CrossRef]
- Schaffner, M.; Faber, J.A.; Pianegonda, L.; Rühs, P.A.; Coulter, F.; Studart, A.R. 3D printing of robotic soft actuators with programmable bioinspired architectures. Nat. Commun. 2018, 9, 878. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yan, J.; Zhang, X.; Xu, B.; Zhao, J. A New Spiral-Type Inflatable Pure Torsional Soft Actuator. Soft Robot. 2018, 5, 527–540. [Google Scholar] [CrossRef]
- Feng, Y.; Xu, J.; Zeng, S.; Gao, Y.; Tan, J. Controlled helical deformation of programmable bilayer structures: Design and fabrication. Smart Mater. Struct. 2020, 29, 085042. [Google Scholar] [CrossRef]
- Hoang, T.T.; Phan, P.T.; Thai, M.T.; Lovell, N.H.; Do, T.N. Bio-Inspired Conformable and Helical Soft Fabric Gripper with Variable Stiffness and Touch Sensing. Adv. Mater. Technol. 2020, 5, 2000724. [Google Scholar] [CrossRef]
- Wang, T.; Ge, L.; Gu, G. Programmable design of soft pneu-net actuators with oblique chambers can generate coupled bending and twisting motions. Sensors Actuators A Phys. 2018, 271, 131–138. [Google Scholar] [CrossRef]
- Amase, H.; Nishioka, Y.; Yasuda, T. Mechanism and basic characteristics of a helical inflatable gripper. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 2559–2564. [Google Scholar]
- Guan, Q.; Sun, J.; Liu, Y.; Wereley, N.M.; Leng, J. Novel Bending and Helical Extensile/Contractile Pneumatic Artificial Muscles Inspired by Elephant Trunk. Soft Robot. 2020, 7, 597–614. [Google Scholar] [CrossRef]
- Kim, S.Y.; Baines, R.; Booth, J.; Vasios, N.; Bertoldi, K.; Kramer-Bottiglio, R. Reconfigurable soft body trajectories using unidirectionally stretchable composite laminae. Nat. Commun. 2019, 10, 3464. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, P.; Luo, J.; Li, J.; Chen, M.Z.Q.; Chen, Y.; Yang, Y.; Chen, R. A Novel Scaffold-Reinforced Actuator With Tunable Attitude Ability for Grasping. IEEE Trans. Robot. 2022, 12, 1–14. [Google Scholar] [CrossRef]
- Li, X.; Golnas, A.; Prinz, F.B. Shape deposition manufacturing of smart metallic structures with embedded sensors. In Smart Structures and Materials 2000: Sensory Phenomena and Measurement Instrumentation for Smart Structures and Materials; International Society for Optics and Photonics: Bellingham, WA, USA, 2000; Volume 3986, pp. 160–171. [Google Scholar]
- Merz, R.; Prinz, F.; Ramaswami, K.; Terk, M.; Weiss, L. Shape deposition manufacturing. In Proceedings of the 1994 International Solid Freeform Fabrication Symposium, Austin, TX, USA, 8–10 August 1994. [Google Scholar]
- Parenti, P.; Cataldo, S.; Annoni, M. Shape deposition manufacturing of 316L parts via feedstock extrusion and green-state milling. Manuf. Lett. 2018, 18, 6–11. [Google Scholar] [CrossRef]
- Park, Y.L.; Chau, K.; Black, R.J.; Cutkosky, M.R. Force sensing robot fingers using embedded fiber Bragg grating sensors and shape deposition manufacturing. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 1510–1516. [Google Scholar]
- Cho, K.J.; Koh, J.S.; Kim, S.; Chu, W.S.; Hong, Y.; Ahn, S.H. Review of manufacturing processes for soft biomimetic robots. Int. J. Precis. Eng. Manuf. 2009, 10, 171–181. [Google Scholar] [CrossRef]
- Cham, J.G.; Bailey, S.A.; Clark, J.E.; Full, R.J.; Cutkosky, M.R. Fast and robust: Hexapedal robots via shape deposition manufacturing. Int. J. Robot. Res. 2002, 21, 869–882. [Google Scholar] [CrossRef]
- Suresh, S.A.; Christensen, D.L.; Hawkes, E.W.; Cutkosky, M. Surface and shape deposition manufacturing for the fabrication of a curved surface gripper. J. Mech. Robot. 2015, 7, 021005. [Google Scholar] [CrossRef]
- Gafford, J.; Ding, Y.; Harris, A.; McKenna, T.; Polygerinos, P.; Holland, D.; Walsh, C.; Moser, A. Shape deposition manufacturing of a soft, atraumatic, deployable surgical grasper. J. Med Devices 2014, 8, 021006. [Google Scholar] [CrossRef] [Green Version]
- Dollar, A.M.; Howe, R.D. The highly adaptive SDM hand: Design and performance evaluation. Int. J. Robot. Res. 2010, 29, 585–597. [Google Scholar] [CrossRef]
- Dekker, C. Stereolithography tooling for silicone molding. Adv. Mater. Process. 2003, 161, 59–61. [Google Scholar]
- Na, H.K.; Ahn, J.Y.; Lee, G.H.; Lee, J.H.; Kim, D.H.; Jung, K.W.; Choi, K.D.; Song, H.J.; Jung, H.Y. The efficacy of a novel percutaneous endoscopic gastrostomy simulator using three-dimensional printing technologies. J. Gastroenterol. Hepatol. 2019, 34, 561–566. [Google Scholar] [CrossRef]
- Wehner, M.; Truby, R.L.; Fitzgerald, D.J.; Mosadegh, B.; Whitesides, G.M.; Lewis, J.A.; Wood, R.J. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 2016, 536, 451–455. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fu, G.; Loh, N.; Tor, S.; Murakoshi, Y.; Maeda, R. Replication of metal microstructures by micro powder injection molding. Mater. Des. 2004, 25, 729–733. [Google Scholar] [CrossRef]
- Truby, R.L.; Wehner, M.; Grosskopf, A.K.; Vogt, D.M.; Uzel, S.G.; Wood, R.J.; Lewis, J.A. Soft somatosensitive actuators via embedded 3D printing. Adv. Mater. 2018, 30, 1706383. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Truby, R.L. Embedded Three-Dimensional Printing of Autonomous and Somatosensitive Soft Robots. Ph.D. Thesis, Harvard University, Cambridge, MA, USA, 2018. [Google Scholar]
- Zhu, M.; Xie, M.; Lu, X.; Okada, S.; Kawamura, S. A soft robotic finger with self-powered triboelectric curvature sensor based on multi-material 3D printing. Nano Energy 2020, 73, 104772. [Google Scholar] [CrossRef]
- Xie, M.; Zhu, M.; Yang, Z.; Okada, S.; Kawamura, S. Flexible self-powered multifunctional sensor for stiffness-tunable soft robotic gripper by multimaterial 3D printing. Nano Energy 2021, 79, 105438. [Google Scholar] [CrossRef]
- Truby, R.L.; Lewis, J.A. Printing soft matter in three dimensions. Nature 2016, 540, 371–378. [Google Scholar] [CrossRef] [PubMed]
- Wallin, T.; Pikul, J.; Shepherd, R. 3D printing of soft robotic systems. Nat. Rev. Mater. 2018, 3, 84–100. [Google Scholar] [CrossRef]
- Gul, J.Z.; Sajid, M.; Rehman, M.M.; Siddiqui, G.U.; Shah, I.; Kim, K.H.; Lee, J.W.; Choi, K.H. 3D printing for soft robotics–A review. Sci. Technol. Adv. Mater. 2018, 19, 243–262. [Google Scholar] [CrossRef] [Green Version]
- Attia, U.M.; Alcock, J.R. A review of micro-powder injection moulding as a microfabrication technique. J. Micromechanics Microeng. 2011, 21, 043001. [Google Scholar] [CrossRef]
- Loh, N.; Tor, S.; Tay, B.; Murakoshi, Y.; Maeda, R. Fabrication of micro gear by micro powder injection molding. Microsyst. Technol. 2008, 14, 43–50. [Google Scholar] [CrossRef]
- You, W.K.; Choi, J.P.; Yoon, S.M.; Lee, J.S. Low temperature powder injection molding of iron micro-nano powder mixture. Powder Technol. 2012, 228, 199–205. [Google Scholar] [CrossRef]
- Checot-Moinard, D.; Rigollet, C.; Lourdin, P. Powder injection moulding PIM of feedstock based on hydrosoluble binder and submicronic powder to manufacture parts having micro-details. Powder Technol. 2011, 208, 472–479. [Google Scholar] [CrossRef]
- Onal, C.D.; Rus, D. A modular approach to soft robots. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; pp. 1038–1045. [Google Scholar]
- Majidi, C. Soft robotics: A perspective—current trends and prospects for the future. Soft Robot. 2014, 1, 5–11. [Google Scholar] [CrossRef]
- Banerjee, H.; Tse, Z.T.H.; Ren, H. Soft robotics with compliance and adaptation for biomedical applications and forthcoming challenges. Int. J. Robot. Autom. 2018, 33, 69–80. [Google Scholar] [CrossRef] [Green Version]
- Caldwell, D.G.; Tsagarakis, N.G.; Kousidou, S.; Costa, N.; Sarakoglou, I. “Soft” exoskeletons for upper and lower body rehabilitation— Design, control and testing. Int. J. Humanoid Robot. 2007, 04, 549–573. [Google Scholar] [CrossRef]
- Asbeck, A.T.; De Rossi, S.M.; Holt, K.G.; Walsh, C.J. A biologically inspired soft exosuit for walking assistance. Int. J. Robot. Res. 2015, 34, 744–762. [Google Scholar] [CrossRef]
- Liu, S.; Zhu, Y.; Zhang, Z.; Fang, Z.; Tan, J.; Peng, J.; Song, C.; Asada, H.; Wang, Z. Otariidae-inspired Soft-robotic Supernumerary Flippers by Fabric Kirigami and Origami. IEEE/ASME Trans. Mechatron. 2020, 26, 2747–2757. [Google Scholar] [CrossRef]
- Gu, G.; Zhang, N.; Xu, H.; Lin, S.; Yu, Y.; Chai, G.; Ge, L.; Yang, H.; Shao, Q.; Sheng, X.; et al. A soft neuroprosthetic hand providing simultaneous myoelectric control and tactile feedback. Nat. Biomed. Eng. 2021, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Greer, J.D.; Blumenschein, L.H.; Alterovitz, R.; Hawkes, E.W.; Okamura, A.M. Robust navigation of a soft growing robot by exploiting contact with the environment. Int. J. Robot. Res. 2020, 39, 1724–1738. [Google Scholar] [CrossRef]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S.; et al. Self-powered soft robot in the Mariana Trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef]
- Naclerio, N.D.; Karsai, A.; Murray-Cooper, M.; Ozkan-Aydin, Y.; Aydin, E.; Goldman, D.I.; Hawkes, E.W. Controlling subterranean forces enables a fast, steerable, burrowing soft robot. Sci. Robot. 2021, 6, eabe2922. [Google Scholar] [CrossRef] [PubMed]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nishida, T.; Okatani, Y.; Tadakuma, K. Development of universal robot gripper using MR α fluid. Int. J. Humanoid Robot. 2016, 13, 1650017. [Google Scholar] [CrossRef]
- Koivikko, A.; Drotlef, D.M.; Sitti, M.; Sariola, V. Magnetically switchable soft suction grippers. Extrem. Mech. Lett. 2021, 44, 101263. [Google Scholar] [CrossRef]
- Qi, Q.; Xiang, C.; Ho, V.A.; Rossiter, J. A Sea-Anemone-Inspired, Multifunctional, Bistable Gripper. Soft Robot. 2021. Online ahead of print. [Google Scholar]
- Li, Y.; Chen, Y.; Yang, Y.; Wei, Y. Passive Particle Jamming and Its Stiffening of Soft Robotic Grippers. IEEE Trans. Robot. 2017, 33, 446–455. [Google Scholar] [CrossRef]
- Yang, Y.; Kan, Z.; Zhang, Y.; Tse, Y.A.; Wang, M.Y. A Novel Variable Stiffness Actuator Based on Pneumatic Actuation and Supercoiled Polymer Artificial Muscles. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 3983–3989. [Google Scholar] [CrossRef]
- Li, Y.; Tao, R.; Li, Y.; Yang, Y.; Zhou, J.; Chen, Y. A Highly Adaptive Robotic Gripper Palm with Tactile Sensing. In Proceedings of the 2022 IEEE International Conference on Real-time Computing and Robotics (RCAR), Guiyang, China, 17–22 July 2022; pp. 130–135. [Google Scholar] [CrossRef]
- Zhou, Y.; Headings, L.M.; Dapino, M.J. Modeling of Fluidic Prestressed Composite Actuators With Application to Soft Robotic Grippers. IEEE Trans. Robot. 2022, 38, 2166–2178. [Google Scholar] [CrossRef]
- Wu, M.; Zheng, X.; Liu, R.; Hou, N.; Afridi, W.H.; Afridi, R.H.; Guo, X.; Wu, J.; Wang, C.; Xie, G. Glowing Sucker Octopus (Stauroteuthis syrtensis)-Inspired Soft Robotic Gripper for Underwater Self-Adaptive Grasping and Sensing. Adv. Sci. 2022, 9, 2104382. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Z.; Zhou, H.; Zhao, C.; Barimah, B.; Li, B.; Xiang, C.; Li, L.; Gou, X.; Luo, M. Inflatable Particle-Jammed Robotic Gripper Based on Integration of Positive Pressure and Partial Filling. Soft Robot. 2021, 9, 309–323. [Google Scholar] [CrossRef]
- Subramaniam, V.; Jain, S.; Agarwal, J.; Valdivia y Alvarado, P. Design and characterization of a hybrid soft gripper with active palm pose control. Int. J. Robot. Res. 2020, 39, 1668–1685. [Google Scholar] [CrossRef]
- Abondance, S.; Teeple, C.B.; Wood, R.J. A dexterous soft robotic hand for delicate in-hand manipulation. IEEE Robot. Autom. Lett. 2020, 5, 5502–5509. [Google Scholar] [CrossRef]
- Martinez, R.V.; Branch, J.L.; Fish, C.R.; Jin, L.; Shepherd, R.F.; Nunes, R.M.; Suo, Z.; Whitesides, G.M. Robotic tentacles with three-dimensional mobility based on flexible elastomers. Adv. Mater. 2013, 25, 205–212. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actuation | Advangtages | Disadvantages | References |
|---|---|---|---|
| Fliud actuation | high energy efficiency, simple structure, flexibility, low cost. | heavy auxiliary equipment, high sealing requirements. | [44,45,46,47] |
| Thermal actuation | contactless actuation, miniaturized actuation. | poor controllability, low actuation efficiency, dependence of intelligent materials. | [48,49,50,51,52,53,54,55,56,57,58] |
| Electric actuation | high response, wireless actuation, easy integration. | coupling instability of electric breakdown, and poor safty. | [59,60,61,62,63,64] |
| Magnetic actuation | remote control without contact. | poor precision control | [65,66] |
| Light actuation | remote directional wireless actuation. | slow reaction, small output force, poor controllability. | [67,68] |
| Humidity actuation | wireless actuation. | low precision deformation, poor real-time ability. | [69,70] |
| Chemical actuation | internal chemical reactions, rapid response. | low precision, poor controllability. | [71,72] |
| Acoustic actuation | non-contact actuation, direct energy conversion. | small actuation force, complex auxiliary equipments. | [73,74] |
| Motion | Bending | Linear | Torsional | Spiral | |
|---|---|---|---|---|---|
| Actuation | |||||
| Fluid | Uneven constraints, Asymmetric stretching. | Fiber-reinforcement, Uniform constraints, Foldable structure. | Multi-chamber, Asymmetric constraints, Uneven elongation. | Tilted multi-chamber. | |
| Thermal | Variable stiffness, Non-uniform stiffness. | SMA spring structure. | Torsional prestain. | Bilayer uneven shrinkage. | |
| Electric | Variable stiffness structures, Unbalanced force. | Linear stretching materials. | / | / | |
| Magnetic | Variable stiffness structures. | / | / | / | |
| Light | Non-uniform shrinkage. | / | / | Non-uniform shrinkage. | |
| Humidity | Internal small volume variation. | / | / | / | |
| Chemical | Uneven volume expansion. | / | / | / | |
| Materials | Characteristics | Limitations |
|---|---|---|
| Flexible silicone | High expansion coefficient, Long lifetime, Good flexibility and safety. | Long molding time, Complex production method, Expensive. |
| SMA/SMP | Rich phase transition phenomenon, Excellent shape memory and super elastic property, Good mechanical property, Corrosion resistance. | Complex manufacturing process, High-cost. |
| MRF/ERF | High boiling point, Low freezing point, Large viscosity change, Good chemical stability, Low-cost. | Poor sedimentation stability. |
| MRE | Large viscosity change, Good stability, Good sedimentation. | Insufficient liquidity. |
| DE | Large deformation and fast response, Light weight, High energy density. | High actuation voltage, Low safety. |
| IPMC | Low driving voltage, Fast response, Low power consumption, Low density and good flexibility. | Back relaxation effects, Low control accuracy. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, X.; Li, H.; Ma, T.; Yang, Y.; Luo, J.; Wang, H.; Jiang, P. A Review of Soft Actuator Motion: Actuation, Design, Manufacturing and Applications. Actuators 2022, 11, 331. https://doi.org/10.3390/act11110331
Tang X, Li H, Ma T, Yang Y, Luo J, Wang H, Jiang P. A Review of Soft Actuator Motion: Actuation, Design, Manufacturing and Applications. Actuators. 2022; 11(11):331. https://doi.org/10.3390/act11110331
Chicago/Turabian StyleTang, Xianzhi, Huaqiang Li, Teng Ma, Yang Yang, Ji Luo, Haidan Wang, and Pei Jiang. 2022. "A Review of Soft Actuator Motion: Actuation, Design, Manufacturing and Applications" Actuators 11, no. 11: 331. https://doi.org/10.3390/act11110331
APA StyleTang, X., Li, H., Ma, T., Yang, Y., Luo, J., Wang, H., & Jiang, P. (2022). A Review of Soft Actuator Motion: Actuation, Design, Manufacturing and Applications. Actuators, 11(11), 331. https://doi.org/10.3390/act11110331