
Research Progress of Machine Learning in Deep Foundation Pit Deformation Prediction




Abstract
1. Introduction
2. Machine Learning Model
2.1. Neural Network
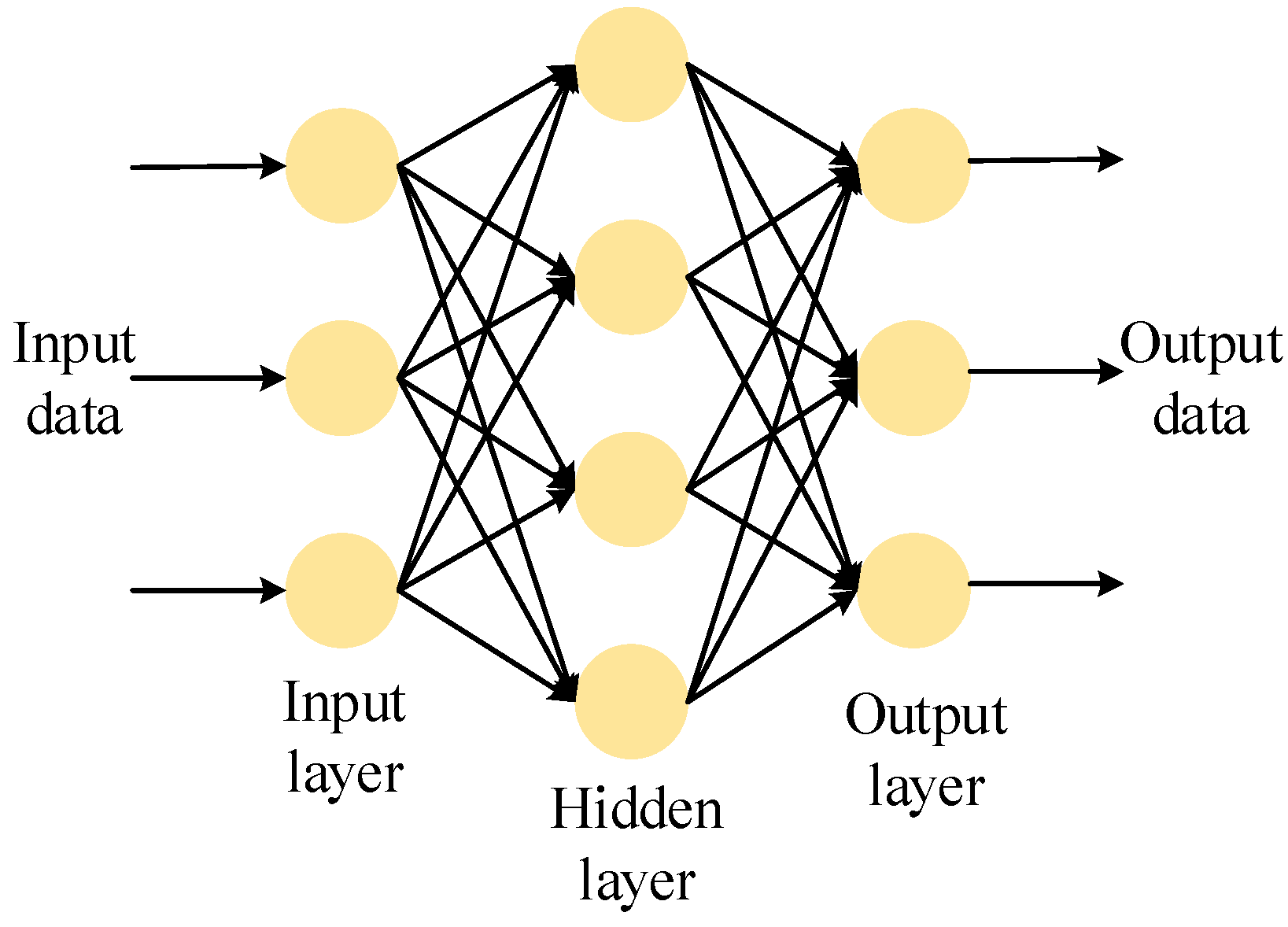
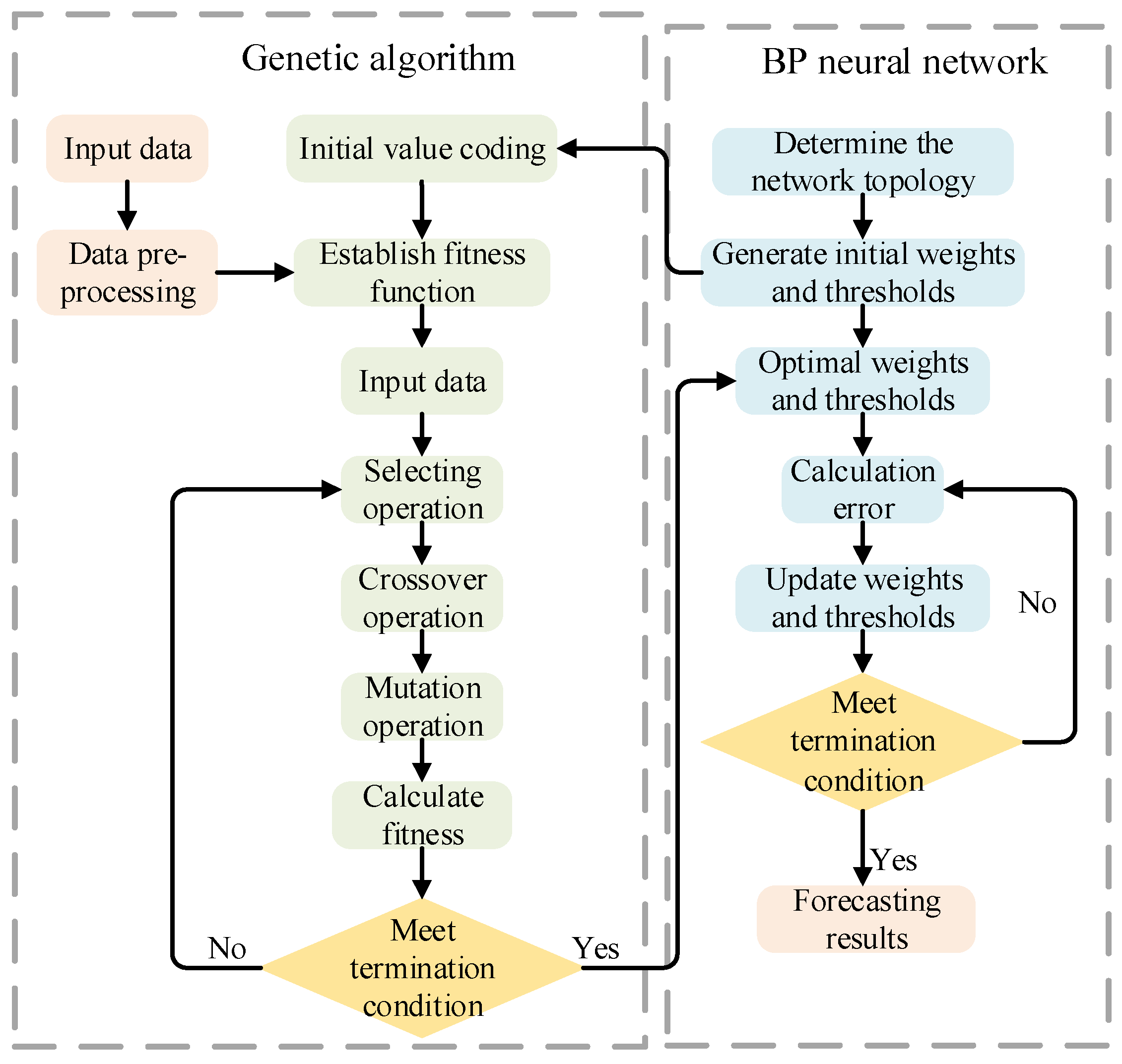
2.1.1. BP Neural Network
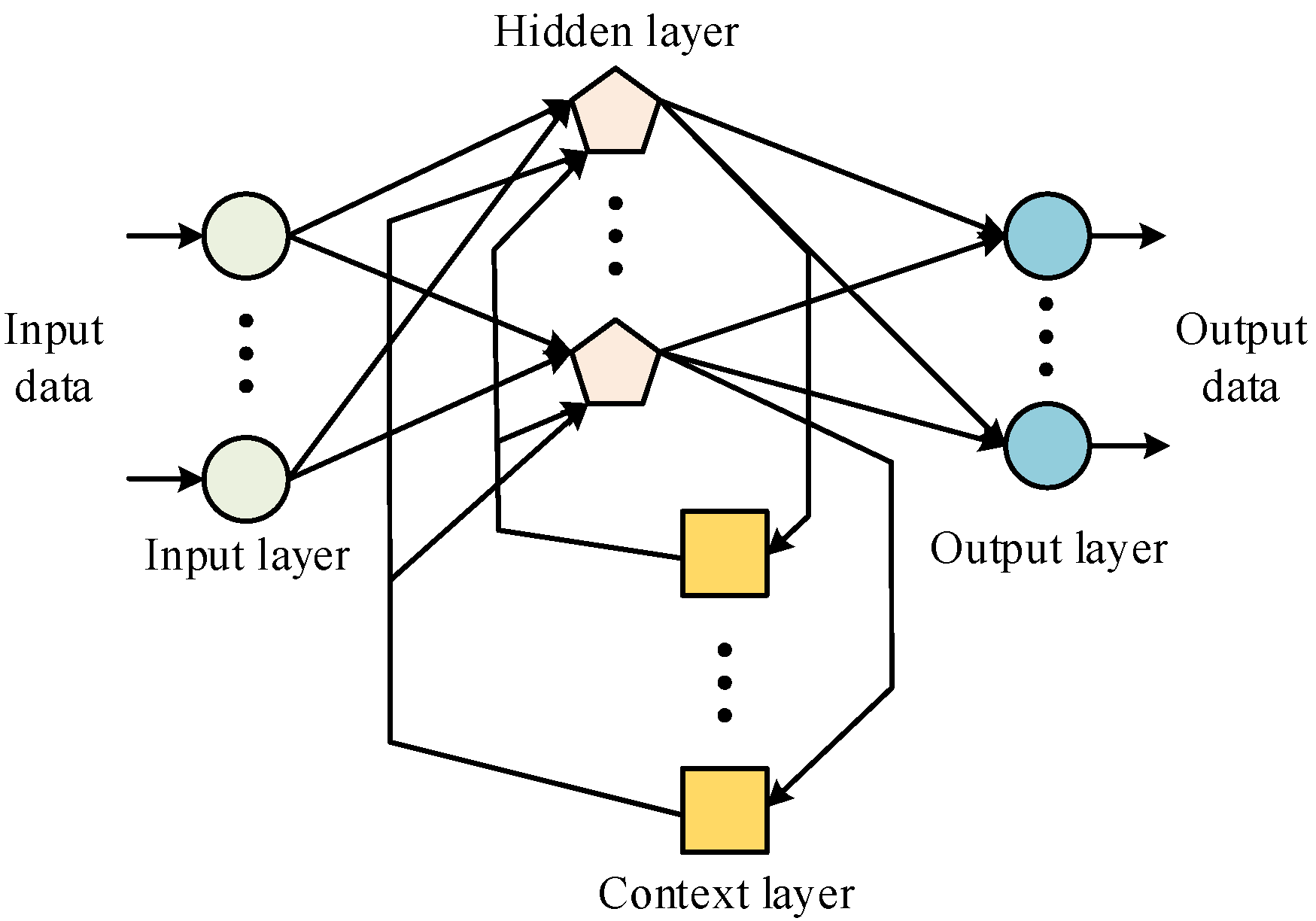
2.1.2. Elman Recurrent Neural Network
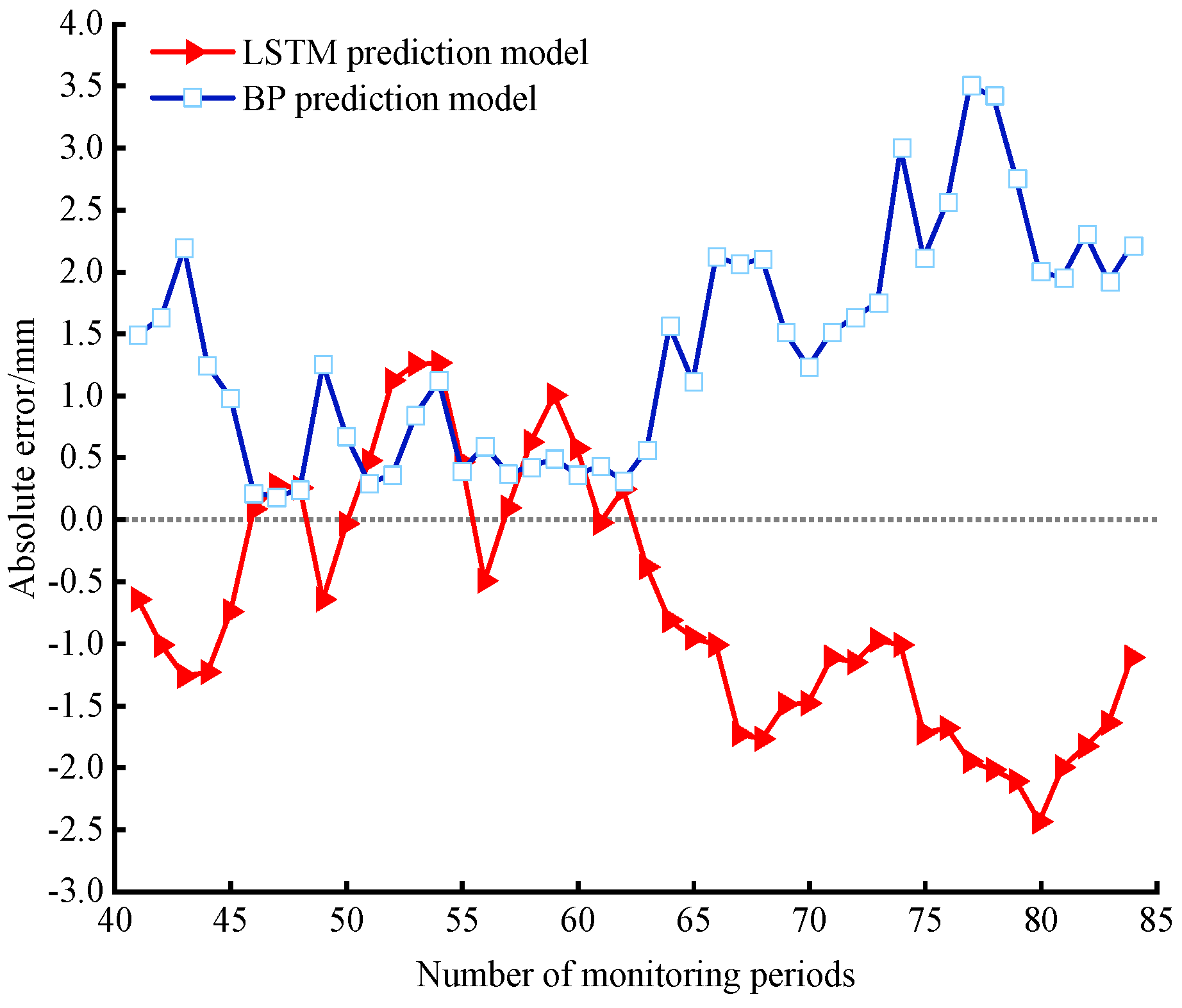
2.1.3. LSTM Neural Network
2.2. Support Vector Machine

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Document | Optimization Algorithm | Optimization Parameter | Annotation |
|---|---|---|---|
| Jin et al. [81] | Differential evolution algorithm | g, c | G, g, and σ are radial basis kernel function parameters. ε is insensitive loss factor. c is penalty parameter. f(x) is decision function. |
| Cui et al. [82] | Differential evolution algorithm | f(x) | |
| Chen et al. [83] | Ant colony optimization algorithm | σ, ε, c | |
| Shi et al. [84] | Genetic algorithm | σ, c | |
| Liu [85] | Particle swarm optimization algorithm | c, g | |
| Song et al. [86] | Simulated annealing algorithm–particle swarm optimization algorithm | G, c | |
| Niu et al. [87] | Genetic algorithm | g, c |
| Document | Optimization Algorithm | Optimization Parameter | Data Processing Technique | Annotation |
|---|---|---|---|---|
| Xu et al. [88] | Grid search algorithm | γ, σ | / | γ and C are regularization parameters. C and d are penalty parameters. σ, g, and σ2 are radial basis kernel function parameters. μ is kernel function width. “/” represents no special processing of the data. |
| Cao et al. [89] | Particle swarm optimization algorithm | σ, c | Phase space reconstruction theory | |
| Li et al. [90] | Particle swarm optimization algorithm | σ, d | Local mean decomposition | |
| Xie et al. [91] | Fruit fly algorithm | σ, C | Phase space reconstruction theory | |
| Jia et al. [92] | Improved Skyhawk algorithm | γ, g | / | |
| Liu et al. [93] | Particle swarm optimization–genetic algorithm | σ, γ | Adaptive noise-complete ensemble empirical mode decomposition |
2.3. Bayesian Network
3. Application Research of Deep Foundation Pit Deformation Prediction Based on Machine Learning
3.1. Displacement Prediction of Supporting Structure (Building Envelope)
3.1.1. Underground Continuous Wall
3.1.2. Supporting Pile
3.2. Prediction of Surrounding Surface Subsidence
3.3. Research Progress of Soil Parameters
3.4. Risk Analysis
3.4.1. Risk Management
3.4.2. Safety Analysis of Supporting Structure
4. Model Reliability Analysis
5. Conclusions and Prospects
- (1)
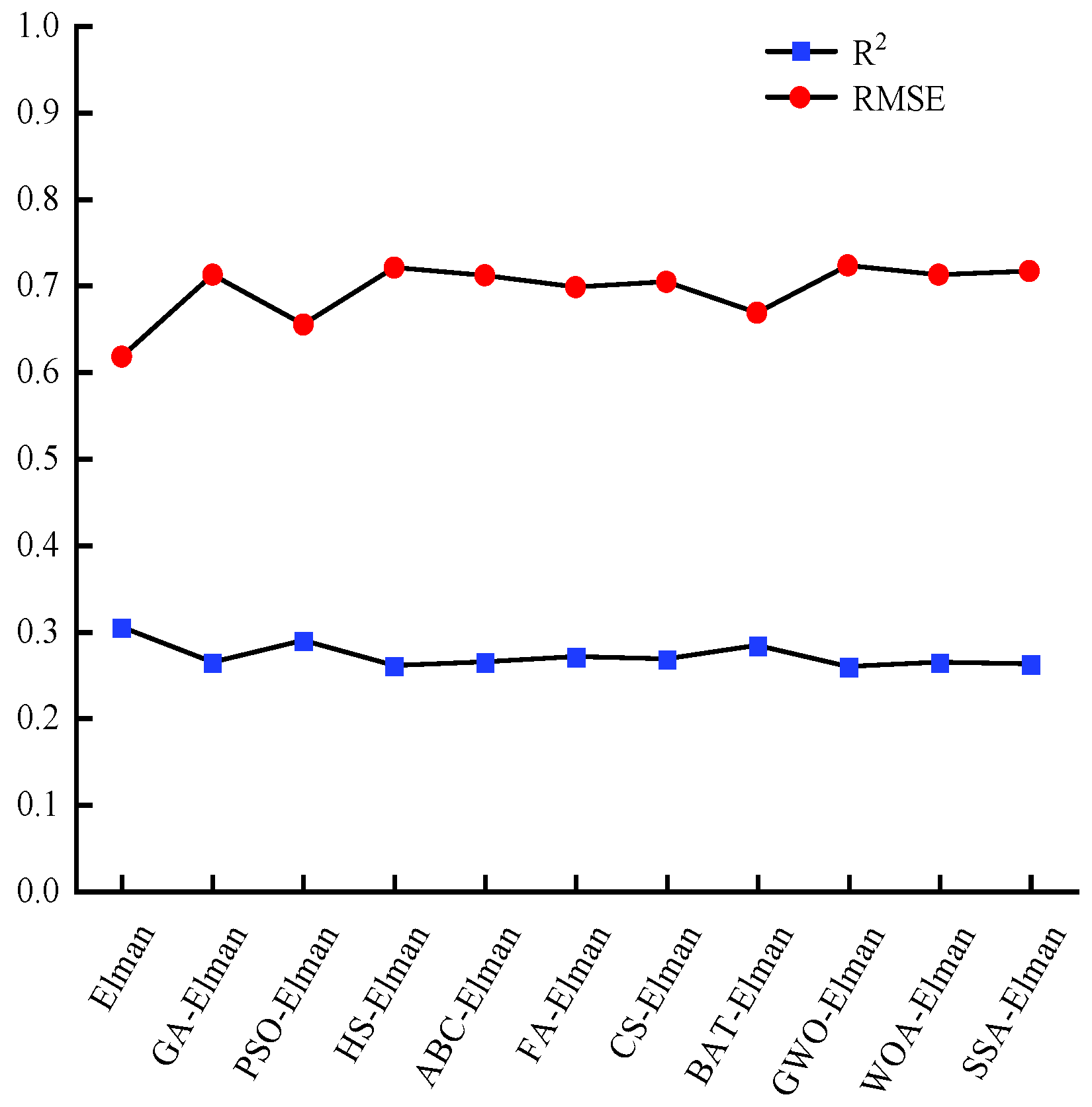
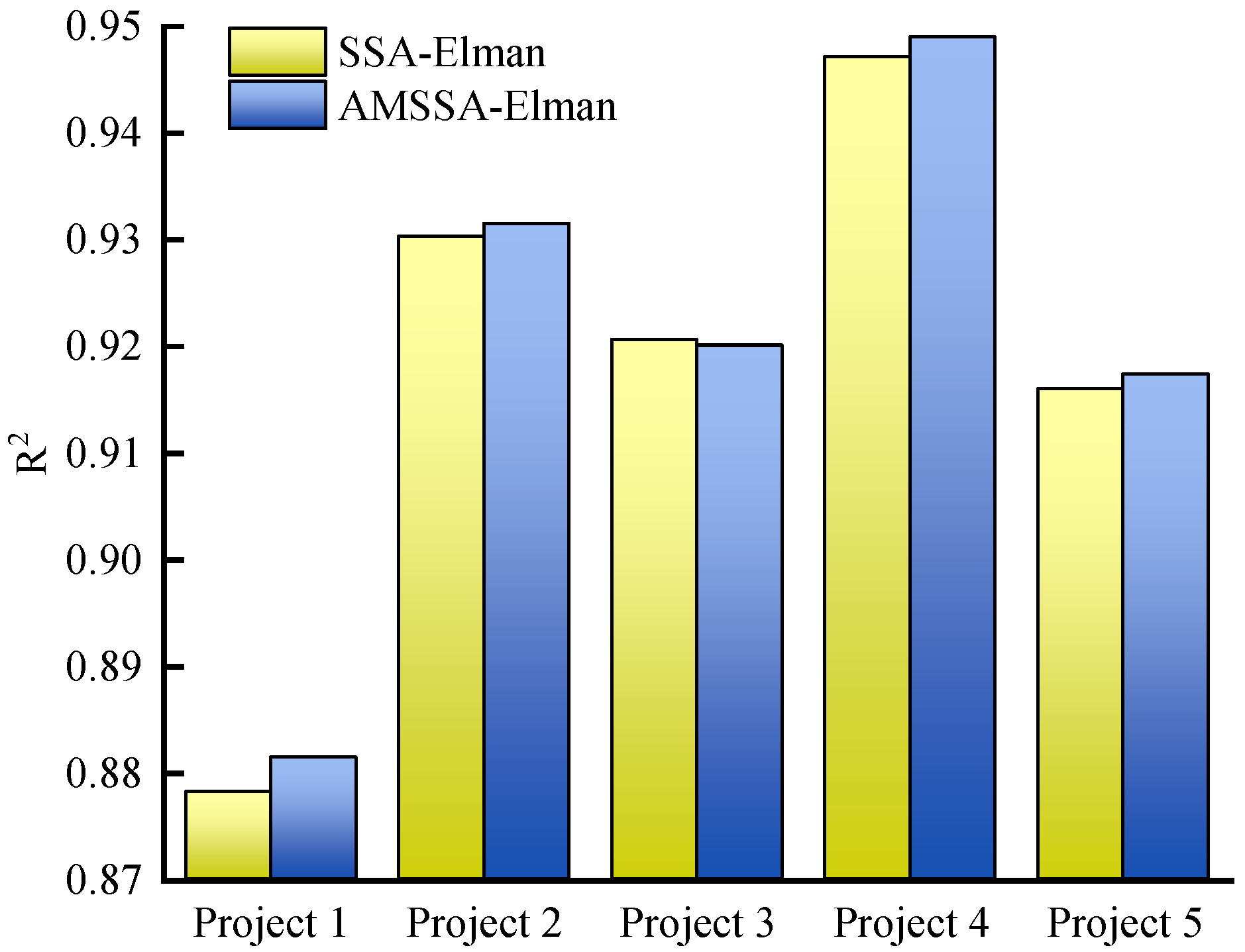
- In recent years, machine learning models in the deep foundation pit deformation prediction field have transitioned from single models to complex combined models, demonstrating a trend toward interdisciplinary integration. Optimizing these machine learning models can significantly enhance prediction accuracy and performance. Recently, new optimization algorithms have been proposed. Future research could explore the extent to which these algorithms improve the prediction models.
- (2)
- Machine learning needs to further adapt to the requirements of deep foundation pit deformation prediction in ultra-deep and extreme environments. In the fields of deformation prediction for deep foundation pit support structures and surrounding surface settlement, it is necessary to explore cutting-edge deep learning models, such as GRU. These advancements aim to provide innovative solutions to address the complex and polytropic challenges associated with deep foundation pit deformation prediction.
- (3)
- Given that the machine learning prediction accuracy hinges on the quality and scale of samples, it is essential to collect a large number of deep foundation pit engineering cases and process the data systematically. Machine learning can be integrated with other advanced technologies, such as the Internet of Things and big data, to establish a comprehensive database for deep foundation pit engineering, which would enable intelligent and automated deformation prediction.
- (4)
- The types of machine learning models used in the deep foundation pit deformation prediction field have become increasingly diverse, offering more reliable technical support for the development and utilization of urban underground spaces. Each machine learning model has its own unique advantages in terms of algorithm design, data processing, computational efficiency, and prediction accuracy. Scientific and rational model selection and optimization are critical to ensuring accurate and efficient predictions.
Author Contributions
Funding
Conflicts of Interest
References
- Yan, N.; Hao, Z.M.; Bai, X.Y.; Zhang, L.; Sun, L.N.; Zhang, Q.J. Force and Deformation Characteristics of Double-row Miniature Pile–Anchor–Support Combination Support Structure for Deep Foundation Pit. J. Cent. South Univ. (Sci. Technol.) 2024, 55, 2295–2309. [Google Scholar]
- Shi, C.Y.; Wang, P.F.; Wang, X.J.; Rui, K.; Lei, G.H. Field Monitoring Analysis of Damage of Buildings Due to Large Deformations Caused by Adjacent Deep Excavations. Chin. J. Geotech. Eng. 2012, 34, 512–518. [Google Scholar]
- Hu, Q.; Xu, S.F.; Chen, R.P.; Ran, L. Influence of Soil Disturbance on Metro Tunnel in Soft Clay Due to Excavation of Deep Foundation pit. Chin. J. Geotech. Eng. 2013, 35, 537–541. [Google Scholar]
- Yoshua, T.; Aswin, L. Investigation into RFD System for Deep Excavation Considering Diaphragm Wall Joints. Rock Soil Mech. 2024, 45, 3717–3727. [Google Scholar]
- Abarkan, I.; Rabi, M.; Ferreira, F.P.V.; Shamass, R.; Limbachiya, V.; S. Jweihan, Y.; Luis, F.P.S. Machine Learning for Optimal Design of Circular Hollow Section Stainless Steel Stub Columns: A Comparative Analysis with Eurocode 3 Predictions. Eng. Appl. Artif. Intell. 2024, 132, 107952. [Google Scholar] [CrossRef]
- Zhou, S.; Jia, Y.; Li, K.; Li, Z.J.; Wu, X.X.; Peng, H.Y.; Zhang, C.M.; Han, K.H.; Wang, C. Mix Proportion Optimization of Ultra-High Performance Concrete Based on Machine Learning. J. Tongji Univ. (Nat. Sci.) 2024, 52, 1018–1023. [Google Scholar]
- Zhao, W.Y.; Chen, P.H. Impact response prediction and optimization of half steel-concrete composite slabs based on machine learning. J. Vib. Shock 2023, 42, 28–37. [Google Scholar]
- Rabi, M. Bond Prediction of Stainless-steel Reinforcement Using Artificial Neural Networks. Proc. Inst. Civ. Eng.-Constr. Mater. 2023, 177, 87–97. [Google Scholar] [CrossRef]
- Rabi, M.; Abarkan, I.; Shamass, R. Buckling Resistance of Hot-finished CHS Beam-columns Using FE Modelling and Machine Learning. Steel Constr. 2024, 17, 93–103. [Google Scholar] [CrossRef]
- Rabi, M.; Jweihan, Y.S.; Abarkan, I.; Felipe, P.V.F.; Shamass, R.; Limbachiya, V.; Konstantinos, D.T.; Luis, F.P.S. Machine Learning-driven Web-post Buckling Resistance Prediction for High-strength Steel Beams with Elliptically-based Web Openings. Results Eng. 2024, 21, 101749. [Google Scholar] [CrossRef]
- Zhao, C.F.; Xiang, S.Q.; Zhu, Y.F. A two-stage Damage Assessment Model for RC Slab under Explosion Based on Machine Learning. J. Build. Struct. 2025, 46, 212–222. [Google Scholar]
- Zhou, Y.; Meng, S.Q.; Kong, Q.Z.; Weng, Y.F. State-of-the-art of Intelligent Damage Detection and Response Prediction of Building Structures. J. Build. Struct. 2024, 45, 107–132. [Google Scholar]
- Wu, X.; Feng, Z.; Liu, J.; Chen, H.Y.; Liu, Y. Predicting Existing Tunnel Deformation from Adjacent Foundation Pit Construction Using Hybrid Machine Learning. Autom. Constr. 2024, 165, 105516. [Google Scholar] [CrossRef]
- Wei, X.; Chheng, S.; Chen, R.; Wang, Z.J.; Li, Y.J. ANN Deformation Prediction Model for Deep Foundation Pit with Considering the Influence of Rainfall. Sci. Rep. 2023, 13, 22664. [Google Scholar] [CrossRef]
- Hong, C.; Luo, G.; Chen, W. Safety Analysis of a Deep Foundation Ditch Using Deep Learning Methods. Gondwana Res. 2023, 123, 16–26. [Google Scholar] [CrossRef]
- Cheng, K.; Qing, R.X.; Ying, H.W.; Lin, C.; Gan, X. Simplified Method for Calculating Ground Lateral Displacement Induced by Foundation Pit Excavation. Eng. Comput. 2020, 37, 2501–2516. [Google Scholar] [CrossRef]
- Li, Y.X. Study on Deformation Law and Influencing Factors of Deep Foundation Pit Support Structure in Silty Clay Layer. Master’s Thesis, Shandong University of Science and Technology, Qingdao, China, 2020. [Google Scholar]
- Liu, G.B.; Huang, Y.X.; Hou, X.Y. A Practical Method for Calculation a Heave of Excavated Foundation. China Civ. Eng. J. 2000, 33, 61–67. [Google Scholar]
- Wang, W.D.; Wang, H.R.; Xu, Z.H. Simplified Method of Deformation Prediction for Excavations Retained by Embedded Walls in Shanghai Soft Soil. Chin. J. Geotech. Eng. 2012, 34, 1792–1800. [Google Scholar]
- Niu, J.; Li, Z.; Feng, C.; Wang, B.; Chen, K. Combined Support System and Calculation Model for Deep Foundation Pits in Fill Soil Areas. Arab. J. Geosci. 2020, 13, 347. [Google Scholar] [CrossRef]
- Cai, J.J.; Xie, C.; Li, S.C.; Li, S.C.; Zhao, S.S. Multi-Layer Supporting Method and Numerical Simulation for Deep Foundation Pit under Complex Condition. Eng. Mech. 2018, 35, 188–194. [Google Scholar]
- Yin Li, J.; Li, Y.J.; Zhu, Y.P.; Huo, B.; Yang, Z.T.; Qin, C. Monitoring and Numerical Simulation of Support for Foundation Pit at Yanyuan Road Station of Lanzhou Metro. Chin. J. Geotech. Eng. 2021, 43, 111–116. [Google Scholar]
- Li, Y.J.; Feng, Z.J.; Zhu, Y.P. Analysis of Mechanical Properties of a Deep Foundation Pit Supporting System in Red Sandstone Area. J. Basic Sci. Eng. Available online: http://kns.cnki.net/kcms/detail/11.3242.TB.20240802.1752.004.html (accessed on 29 December 2024).
- Zhou, Y.; Ye, W.N.; Gao, S. Deformation Characteristics of Excavation of Deep Foundation Pit at a Metro Station in Lanzhou. Chin. J. Geotech. Eng. 2018, 40, 141–146. [Google Scholar]
- Ye, S.H.; Ding, S.H.; Gong, X.N.; Gao, S.; Chen, C.L. Monitoring and Numerical Simulation of Deep Foundation Pit of a Subway Station in Lanzhou. Chin. J. Geotech. Eng. 2018, 40, 177–182. [Google Scholar]
- Ni, X.D.; Wang, C.; Tang, D.H.; Lu, J.F.; Wang, X.Y.; Chen, W.C. Early-Warning and Inducement Analysis of Super-Large Deformation of Deep Foundation Pit on Soft Soil. J. Cent. South Univ. (Sci. Technol.) 2022, 53, 2245–2254. [Google Scholar]
- Wang, Y.; Liu, G.B.; Tu, C.B. Deformation Prediction for Deep Excavations Based on Genetic Algorithms-GRNN. Chin. J. Geotech. Eng. 2012, 34, 167–171. [Google Scholar]
- Guo, J.; Zha, L.Y.; Pang, Y.C.; Shen, S.S.; Xia, P. Prediction for Ground Settlement of Deep Excavations Based on Wavelet Analysis. Chin. J. Geotech. Eng. 2014, 36, 343–347. [Google Scholar]
- Xiong, X.B.; Gui, G.Q.; Zheng, M.X.; Xu, J.C.; Wang, B.J. Deformation Prediction for Deep Foundation Pits Based on Pearl Curve and Genetic Neural Network. Chin. J. Geotech. Eng. 2008, 30, 220–224. [Google Scholar]
- Li, B.Y.; Sima, J. Horizontal Displacement Back-Analysis for Deep Excavation Using MEC-BP Neural Network. J. Railw. Sci. Eng. 2021, 18, 1764–1772. [Google Scholar]
- Zhou, R.Z.; Qiu, G.X. Displacement Back-Analysis for Deep Foundation Pit Based on BP Neural Networks. China Civ. Eng. J. 2001, 34, 60–62+73. [Google Scholar]
- Zhang, F.B.; Chen, Y.L.; Pan, Z.T. Analysis of Lateral Deformation of Deep Excavation Based on Back Propagation Neural Network and Fuzzy Logical Control. Rock Soil Mech. 2005, 26, 1148–1152. [Google Scholar]
- Yang, Z.F.; Luo, L.; Jia, D.Y.; Tang, X. Research on Deformation Prediction of Deep Foundation Pit Based on Wavelet Denoising. Yangtze River 2014, 45, 41–46. [Google Scholar]
- Wang, X.K.; Wang, J. Study of Deformation Prediction of Foundation Pit Based on Optimized Support Vector Machine and Chaotic BP Neural Network. Tunn. Constr. 2017, 37, 1105–1113. [Google Scholar]
- Liu, Q.; Yang, C.Y.; Lin, L. Deformation Prediction of a Deep Foundation Pit Based on the Combination Model of Wavelet Transform and Gray BP Neural Network. Math. Probl. Eng. 2021, 2021, 2161254. [Google Scholar] [CrossRef]
- Cao, J.; Ding, W.Y.; Zhao, D.S.; Song, Z.G.; Liu, H.M. Time Series Forecast of Foundation Pit Deformation Based on LSSVM-ARMA Model. Rock Soil Mech. 2014, 35, 579–586. [Google Scholar]
- Ma, Q.; Liu, S.; Fan, X.; Chai, C.; Wang, Y.Y.; Yang, K. A Time Series Prediction Model of Foundation Pit Deformation Based on Empirical Wavelet Transform and NARX Network. Mathematics 2020, 8, 1535. [Google Scholar] [CrossRef]
- Zhang, J.; Cheng, Z. Prediction of Surface Subsidence of Deep Foundation Pit Based on Wavelet Analysis. Processes 2022, 11, 107. [Google Scholar] [CrossRef]
- Guo, J.; Chen, J.; Hu, Y. Time Series Prediction for Deformation of the Metro Foundation Pit Based on Wavelet Intelligence Model. Rock Soil Mech. 2020, 41, 299–304. [Google Scholar]
- Qian, J.G.; Wu, A.H.; Ji, J.; Cheng, L.; Xu, W. Prediction for Nonlinear Time Series of Geotechnical Engineering Based on Wavelet-Optimized LSTM-ARMA Model. J. Tongji Univ. (Nat. Sci.) 2021, 49, 1107–1115. [Google Scholar]
- Dai, Y.B. Study on Application of Multi-Step Scroll Real-Time Prediction Method to Monitoring of Deep Foundation Pit. Chin. J. Rock Mech. Eng. 2006, 25, 4198–4203. [Google Scholar]
- Meng, J.; Li, H.M.; Tian, W. Prediction of Tunnel Uplift Deformation Caused by Foundation Pit Construction Based on GA-BP. J. Railw. Sci. Eng. 2019, 16, 2521–2529. [Google Scholar]
- Li, Z.; Hu, X.; Chen, C.; Liu, C.; Han, Y.; Yu, Y.; Du, L. Multi-Factor Settlement Prediction Around Foundation Pit Based on SSA-Gradient Descent Model. Sci. Rep. 2022, 12, 19778. [Google Scholar] [CrossRef]
- Yuan, Z.; Gao, L.; Chen, H.; Song, S. Study on Settlement of Self-Compacting Solidified Soil in Foundation Pit Backfilling Based on GA-BP Neural Network Model. Buildings 2023, 13, 2014. [Google Scholar] [CrossRef]
- Ni, X.D.; Zhang, Y.K.; Yan, L.; Wang, D.X.; Xu, S.; Wang, Y. Prediction Study on Super Large Deformation of Deep Foundation Pit Based on HSS-MCC Fusion Model and SSA-BP Neural Network. J. Hunan Univ. (Nat. Sci.) 2024, 51, 35–45. [Google Scholar]
- Li, Q.; Cheng, F.; Zhang, X. Numerical Simulation and Deformation Prediction of Deep Pit Based on PSO-BP Neural Network Inversion of Soil Parameters. Sensors 2024, 24, 2959. [Google Scholar] [CrossRef] [PubMed]
- Cui, D.W.; Li, D.H. Improved Supply-Demand-Based Optimization Algorithm-Exponential Power Product Model in Foundation Pit Deformation Prediction. Adv. Sci. Technol. Water Resour. 2020, 40, 43–50. [Google Scholar]
- Zhou, X.; Hu, W.; Zhang, Z.; Ye, J.N.; Zhao, C.; Bian, X.C. Adaptive Mutation Sparrow Search Algorithm-Elman-AdaBoost Model for Predicting the Deformation of Subway Tunnels. Undergr. Space 2024, 17, 320–360. [Google Scholar] [CrossRef]
- Wang, F. Factors Influencing Deformation of Subway’s Deep Foundation Pit Based on Quantification Theory III. J. Yangtze River Sci. Res. Inst. 2019, 36, 110–114. [Google Scholar]
- Xu, B.W.; Jiang, X.L. Diaphragm Wall’s Deformation Forecasting Based on BP-RBF Neural Networks. Eng. Mech. 2009, 26, 163–166. [Google Scholar]
- Fang, L.S.; He, G.W.; Luo, C.M.; Xiong, M.X. The Application of Gray Theory and BP Artificial Neural Network Theory in Deformation Prediction of Subway Deep Foundation Excavation. Constr. Technol. 2017, 46, 57–60. [Google Scholar]
- Hu, S.W. Study on Deformation of Foundation Pit Based on Grey Neural Network Model of Genetic Algorithm. Sci. Surv. Mapp. 2019, 44, 91–94+100. [Google Scholar]
- Ouyang, X.; Nie, J.; Xiao, X. Study of Improved Grey BP (Back Propagation) Neural Network Combination Model for Predicting Deformation in Foundation Pits. Buildings 2023, 13, 1682. [Google Scholar] [CrossRef]
- Yin, S.Q.; Liang, F.Y.; Yao, X.Q. Dynamic Risk Prediction for the Deep Excavations Based on Neutral Networks and It’s Applications. Chin. J. Undergr. Space Eng. 2011, 7, 996–1000+1012. [Google Scholar]
- Ren, Z. Deformation Prediction and Safety Assessment of Foundation Pit Based on SSA Elman and Grey Cloud Model. Master’s Thesis, Dalian University of Technology, Dalian, China, 2021. [Google Scholar]
- Sun, L.; Liu, S.; Zhang, L.; He, K.; Yan, X. Prediction of the Displacement in a Foundation Pit Based on Neural Network Model Fusion Error and Variational Modal Decomposition Methods. Measurement 2021, 240, 115534. [Google Scholar] [CrossRef]
- Zhang, Y.F. Research on Deep Foundation Pit Deformation Prediction Based on Artificial Neural Network and Sparrow Search Algorithm. Master’s Thesis, South China University of Technology, Guangzhou, China, 2022. [Google Scholar]
- Guo, W.; Meng, Q.; Wang, X.; Zhang, Z.; Yang, K.; Wang, C. Landslide Displacement Prediction Based on Variational Mode Decomposition and GA-Elman Model. Appl. Sci. 2022, 13, 450. [Google Scholar] [CrossRef]
- Zhao, Q.J. Research on Deformation Prediction of Deep Excavation by Recurrent Neural Network and Phase Space Reconstruction. Master’s Thesis, Tongji University, Shanghai, China, 2008. [Google Scholar]
- Xu, K.S. Study on Stability Analysis and Deformation Prediction of Deep Foundation Pit Slope of a Building under Soil-Rock Combination Geological Conditions. Master’s Thesis, Guizhou University, Guiyang, China, 2022. [Google Scholar]
- Zhang, B. Research on Intelligent Recognition and Prediction Method of Monitoring Information of Environment around Deep Foundation Pit. Master’s Thesis, Southeast University, Nanjing, China, 2020. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Zhao, H.J.; Zhang, M.Y.; Liu, W.; Shi, P.X. Dynamic Prediction of Diaphragm Wall Deflection Caused by Deep Excavation Using Neural Network Algorithm. Chin. J. Undergr. Space Eng. 2021, 17, 321–327. [Google Scholar]
- Zhang, S.J.; Tan, Y. Deformation Prediction of Foundation Pit Based on Long Short-Term Memory Algorithm. Tunn. Constr. 2022, 42, 113–120. [Google Scholar]
- Li, H.; Zhao, Z.; Du, X. Research and Application of Deformation Prediction Model for Deep Foundation Pit Based on LSTM. Wirel. Commun. Mob. Comput. 2022, 2022, 9407999. [Google Scholar] [CrossRef]
- Zhang, W.; Deng, B.B.; Qiu, J.C.; Xia, G.C.; Yao, Z.R.; Liu, Z.W. Zhu, X.Y.; Wang, Y.J. Deformation Prediction of Deep Foundation Pit of Sluice Based on ESMD-FE-AJSO-LSTM Algorithm. South–North Water Transf. Water Sci. Technol. 2024, 22, 378–387+408. [Google Scholar]
- Ma, E.L.; Lai, J.X.; Wang, L.X.; Wang, K.; Lei, S.X.; Li, C.J.; Qiu, J.L. Deformation Prediction during Underground Construction Based on Traction Algorithm in Control Phases. Rock Soil Mech. 2023, 44, 577–594. [Google Scholar]
- Hong, Y.C.; Qian, J.G.; Ye, Y.X.; Cheng, L. Application of CNN-LSTM Model Based on Spatiotemporal Correlation Characteristics in Deformation Prediction of Excavation Engineering. Chin. J. Geotech. Eng. 2021, 43, 108–111. [Google Scholar]
- Tang, H.R.; Hu, Y.; Lei, H.Y.; Lu, J.F.; Liu, T.; Wang, K. Time Series Prediction of Surface Displacement Induced by Excavation of Foundation Pits Based on Deep Learning. Chin. J. Geotech. Eng. 2024, 46, 236–241. [Google Scholar]
- Zhang, W.S.; Yuan, Y.; Long, M.; Sun, L. Prediction of Surface Settlement around Subway Foundation Pits Based on Spatiotemporal Characteristics and Deep Learning Models. Comput. Geotech. 2024, 168, 106149. [Google Scholar] [CrossRef]
- Li, T.; Shu, J.J.; Wang, Y.L.; Chen, Q. Horizontal Deformation Prediction of Deep Foundation Pit Support Piles Based on Decomposition Methods Model. Rock Soil Mech. 2024, 45, 496–506. [Google Scholar]
- Fang, Q.; Chen, S.; Liu, X.Z.; Qiu, W. Application of the Variational Mode Decomposition-Based CNN-LSTM Model in Predicting Excavation Deformation. Mech. Eng. 2024, 46, 1015–1022. [Google Scholar]
- Cho, K.; Merrienboer, B.V.; Gülçehre, Ç.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations using RNN Encoder-Decoder for Statistical Machine Translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Liu, R.; Zhang, Q.; Jiang, F.; Zhou, J.; He, J.; Mao, Z. Research on Deformation Prediction of VMD-GRU Deep Foundation Pit Based on PSO Optimization Parameters. Materials 2024, 17, 2198. [Google Scholar] [CrossRef]
- Xu, C.J.; Li, X.Y. Lateral Deformation Prediction of Deep Foundation Retaining Structures Based on Artificial Neural Network. J. Shanghai Jiaotong Univ. 2023, 58, 1735–1744. [Google Scholar]
- Vapnik, V. An overview of statistical learning theory. IEEE Transon Neural Netw. 1999, 10, 988–999. [Google Scholar] [CrossRef]
- Suykens, J.A.; Vandewalle, J. Least Squares Support Vector Machine Classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar] [CrossRef]
- Xu, H.Z.; Zhou, Y.; Yang, L. Maximal Horizontal Displacement Prediction Model of Foundation Pit Based on LS-SVM. Water Resour. Power 2011, 29, 123–125. [Google Scholar]
- Li, X.; Liu, X.; Li, C.Z.; Hu, Z.; Shen, G.Q.; Huang, Z. Foundation Pit Displacement Monitoring and Prediction using Least Squares Support Vector Machines Based on Multi-Point measurement. Struct. Health Monit. 2019, 18, 715–724. [Google Scholar] [CrossRef]
- Cao, J.; Ding, W.Y.; Zhao, D.S.; Liu, H.M. Time Series Forecast of Foundation Pit Deformation Based on PSO-LSSVM. Control Eng. China 2015, 22, 475–480. [Google Scholar]
- Jin, L.; Jiang, A.N.; Zhao, W. Time Series Forecast Model of Foundation Pit Deformation Based on DE-SVM. Chin. J. Geotech. Eng. 2008, 30, 216–219. [Google Scholar]
- Cui, T.J.; Ma, Y.D. Prediction of Soil Settlement Outside Pit Based on DE and SVM. China Saf. Sci. J. 2013, 23, 83–89. [Google Scholar]
- Chen, X.F.; Liu, L.; Huang, T. Settlement Prediction for a Metro Tunnel Adjacent to a Deep Large-Scale Foundation Pit. Mod. Tunn. Technol. 2014, 51, 94–100. [Google Scholar]
- Shi, X.F.; Wang, L.F.; Shen, Y.; Liu, J.E.; Guo, Z.L. Research on Time Series Prediction of Foundation Excavation Construction Land Settlement Based on the GA-SVM. Constr. Technol. 2017, 46, 16–19+31. [Google Scholar]
- Liu, P. Research on the Intelligent Pre-Control of Metro Construction Safety Risks Oriented to Design Process. Ph.D. Thesis, Southeast University, Nanjing, China, 2019. [Google Scholar]
- Song, Z.; Liu, S.; Jiang, M.; Yao, S. Research on the Settlement Prediction Model of Foundation Pit Based on the Improved PSO-SVM Model. Sci. Program. 2022, 2022, 1921378. [Google Scholar] [CrossRef]
- Niu, S.X.; Li, S.L.; Liu, Y.C.; An, S.Z.; Huang, Y.R. Application of GASVM-ARMA Model Based on Wavelet Transform in Deformation Prediction of Deep Foundation Pit. J. Civ. Environ. Eng. 2023, 45, 16–23. [Google Scholar]
- Xu, H.Z.; Teng, K.; Li, X.H. Time Series Prediction Model of Deformation of Foundation Pit Based on Least Squares Support Vector Machines. Water Resour. Power 2011, 29, 92–94+215. [Google Scholar]
- Cao, J.; Li, W.Y.; Zhao, D.S.; Song, Z.G.; Ding, W.Y. Forecast of Building Inclination around Foundation Pit Based on PSO-LSSVM Model. Comput. Eng. Appl. 2016, 52, 254–259. [Google Scholar]
- Li, S.H.; Liu, H.Q. Deep Foundation Pit Deformation Prediction Based on LMD-PSO-LSSVM Model. Chin. J. Undergr. Space Eng. 2018, 14, 483–489. [Google Scholar]
- Xie, Y.Y.; Wu, D.P.; Fu, C.; Zhou, J.; Shi, Y.J. Research on Deformation Prediction Model of FOA-GLSSVM Deep Foundation Pit Based on Phase Space Reconstruction. J. Geod. Geodyn. 2018, 38, 1048–1052. [Google Scholar]
- Jia, L.; Jia, S.J.; Gao, S. Prediction of Settlements of Buildings around Excavations Based on IAO-LSSVM Model: Taking a Subway Foundation Pit in Shenzhen Huaqiangnan as an Example. Sci. Technol. Eng. 2024, 24, 2885–2892. [Google Scholar]
- Liu, Q.L.; Liu, Y.H.; Qin, L.; Zhao, P. Deep Foundation Pit Settlement Deformation Prediction Based on Improved Least Square Support Vector Machine Combined Model. J. Univ. Jinan (Sci. Technol.) 2024, 38, 8–14. [Google Scholar]
- Fusion, P.J. Propagation and structuring in belief networks. Artif. Intell. 1986, 29, 241–288. [Google Scholar]
- Shen, J.H.; Lu, S.P. Application of Fuzzy Dynamic Bayesian Network in Risk Evolution Analysis of Deep Foundation Pit Construction. J. Saf. Environ. 2023, 23, 4211–4221. [Google Scholar]
- Xie, H.T.; Chen, F. Bayesian Network Based Method for Diagnosis of Soil Slope Collapse Accident. China Saf. Sci. J. 2012, 22, 127–132. [Google Scholar]
- Tang, Z.; McCabe, B. Developing Complete Conditional Probability Tables from Fractional Data for Bayesian Belief Networks. J. Comput. Civ. Eng. 2007, 21, 265–276. [Google Scholar] [CrossRef]
- Wang, H.W.; Zhou, J.; Jia, M.C. Bayesian Networks Analysis on Soilcement Mixing Wall. J. Tongji Univ. (Nat. Sci.) 2012, 40, 27–32. [Google Scholar]
- Zhang, G.; Wang, C.; Jiao, Y.; Wang, H.; Qin, W.; Chen, W.; Zhong, G. Collapse Risk Analysis of Deep Foundation Pits in Metro Stations using a Fuzzy Bayesian Network and a Fuzzy AHP. Math. Probl. Eng. 2020, 2020, 4214379. [Google Scholar] [CrossRef]
- Wang, C.T.; Wang, H.; Qin, W.M.; Zhong, G.Q.; Chen, W. Evaluation of Collapse Possibility of Deep Foundation Pits in Metro Stations Based on Multi-State Fuzzy Bayesian Networks. Rock Soil Mech. 2020, 41, 1670–1679+1689. [Google Scholar]
- Ren, J.; Jenkinson, I.; Wang, J.; Xu, D.L.; Yang, J.B. An offshore risk analysis method using fuzzy Bayesian network. J. Offshore Mech. Arct. Eng. 2009, 131, 041101. [Google Scholar] [CrossRef]
- Lei, Z.; Wang, Y.; Zhang, Y.; Gu, F.; Zan, Z.; Mei, Y.; Liu, W.; Zhou, D. Advanced Risk Assessment for Deep Excavation in Karst Regions Using Improved Dempster–Shafer and Dynamic Bayesian Networks. Buildings 2024, 14, 3022. [Google Scholar] [CrossRef]
- Wu, H. Structural Safety Analysis of Operating Subway Shield Tunnel Based on Copula Dependency Modeling. Master’s Thesis, Huazhong University of Science and Technology, Wuhan, China, 2020. [Google Scholar]
- Wu, D.W.; Jiang, Y.X.; Liang, G.L.; Lin, Y.X. Reliability Analysis on Deep Foundation Pit Support Using Pair-Copula Bayesian Network. Yangtze River 2025, 56, 140–146+163. [Google Scholar]
- Yuan, J.R.; Chi, Y.W.; Liu, X.Z. Dynamic Prediction on Displacement of Diaphragm Wall in Deep Foundation Excavation Engineering Using Artificial Neural Networks. J. Tongji Univ. (Nat. Sci.) 2000, 28, 282–286. [Google Scholar]
- Dong, X.Z.; Wu, H.; Ruan, W.J.; An, H.G. Artificial Intelligent Prediction of Round and Deep Foundation Pit Deformation for South Anchorage of WuhanYangluo Bridge. World Bridges 2005, 34, 40–42+56. [Google Scholar]
- Tu, C.L.; Xu, Z.X. Application of Support Vector Machine in Deformation Prediction of Deep Foundation Pit Retaining Structure of Subway Station. Railw. Eng. 2007, 47, 37–39. [Google Scholar]
- Zeng, H.; Hu, J.; Bao, J.A. Research on Deformation Prediction Method of Foundation Pit Retaining Structure Based on BP Artificial Neural Network. Railw. Eng. 2011, 51, 70–73. [Google Scholar]
- Li, Y.J.; Xue, Y.D.; Yue, L.; Chen, B. Displacement Prediction of Deep Foundation Pit Based on Genetic Algorithms and BP Neural Network. Chin. J. Undergr. Space Eng. 2015, 11, 741–749. [Google Scholar]
- He, Z.Y.; Zheng, W. Deformation Prediction of Deep Foundation Pit Based on BP Neural Network. J. South China Univ. Technol. (Nat. Sci. Ed.) 2008, 36, 92–96. [Google Scholar]
- Hu, Q.C.; Hu, B.; Jiang, H.F. Application of BP Artificial Neural Network to the Displacement Prediction of Deep Foundation Pile. Saf. Environ. Eng. 2013, 20, 154–158. [Google Scholar]
- Liu, J.; Li, F.H.; Liu, X.X. Optimized Genetic Algorithm-Back Propagation Neural Network Model and Its Application in Foundation Pit Deformation Prediction. Tunn. Constr. 2021, 41, 1733–1739. [Google Scholar]
- Lin, N.; Zhang, W.C.; Liu, Y.; Wu, M.H. Prediction of Deep Foundation Pit Horizontal Displacement Based on Random Forest Model in Seasonal Frozen Region. Chin. J. Undergr. Space Eng. 2018, 14, 357–362. [Google Scholar]
- Yang, P.; Yong, W.; Li, C.; Peng, K.; Wei, W.; Qiu, Y.; Zhou, J. Hybrid Random Forest-Based Models for Earth Pressure Balance Tunneling-Induced Ground Settlement Prediction. Appl. Sci. 2023, 13, 2574. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhou, W.H.; Xu, T. Tunneling-induced settlement prediction using the hybrid feature selection method for feature optimization. Transp. Geotech. 2022, 36, 100808. [Google Scholar] [CrossRef]
- Zhang, C.; Ju, J.; Guo, Z. Comparison of Models for Settlement Prediction Based on Neural Network for Deep Foundation Pit. Chin. J. Undergr. Space Eng. 2013, 9, 1315–1319. [Google Scholar]
- Xiang, W.; Zhang, A.J.; Gao, W. Deformation Predictions and Control Methods for Excavation of Deep Foundation Pits. Chin. J. Geotech. Eng. 2012, 34, 634–637. [Google Scholar]
- Zhou, X.; Zhao, C.; Bian, X. Prediction of maximum ground surface settlement induced by shield tunneling using XGBoost algorithm with golden-sine seagull optimization. Comput. Geotech. 2023, 154, 105156. [Google Scholar] [CrossRef]
- Su, J.; Wang, Y.; Niu, X.; Sha, S.; Yu, J. Prediction of Ground Surface Settlement by Shield Tunneling using XGBoost and Bayesian Optimization. Eng. Appl. Artif. Intell. 2022, 114, 105020. [Google Scholar] [CrossRef]
- Chen, Y.R. Application of Intelligent Algorithm Based on Genetic Algorithm and Extreme Learning Machine to Deformation Prediction of Foundation Pit. Tunn. Constr. 2018, 38, 941–947. [Google Scholar]
- Han, Y.; Wang, Y.; Liu, C.; Hu, X.; Du, L. Application of Regularized ELM Optimized by Sine Algorithm in Prediction of Ground Settlement around Foundation Pit. Environ. Earth Sci. 2022, 81, 413. [Google Scholar] [CrossRef]
- Deng, J.; Zeng, T.; Yuan, S.; Fan, H.; Xiang, W. Interval Prediction of Building Foundation Settlement Using Kernel Extreme Learning Machine. Front. Earth Sci. 2022, 10, 939772. [Google Scholar] [CrossRef]
- Ge, C.F.; Hu, Q.X.; Li, F.M. A Study on Application of Artificial Neural Network in Prediction of Ground Surface Settlement around Deep Foundation Pit. J. Disaster Prev. Mitig. Eng. 2008, 28, 519–523. [Google Scholar]
- Zhong, G.Q.; Wang, H.; Li, L.; Wang, C.T.; Xie, B.T. Prediction of Maximum Settlement of Foundation Pit Based on SFLA-GRNN Model. Rock Soil Mech. 2019, 40, 792–798+808. [Google Scholar]
- Qiao, S.F.; Tan, J.K.; Zhang, Y.G.; Wan, L.J.; Zhang, M.F.; Tang, J.; He, Q. Settlement Prediction of Foundation Pit Excavation Based on the GWO-ELM Model considering Different States of Influence. Adv. Civ. Eng. 2021, 2021, 8896210. [Google Scholar]
- Zhang, C.; Li, J.Z.; He, Y. Application of Optimized Grey Discrete Verhulst–BP Neural Network Model in Settlement Prediction of Foundation Pit. Environ. Earth Sci. 2019, 78, 441. [Google Scholar] [CrossRef]
- Liu, C.M.; Jiang, W.; Gong, Y.F.; Lin, S.Y. Analysis and Prediction of Foundation Pit Deformation Based on K-means Improved Radial Basis Function Neural Network. Tunn. Constr. 2021, 41, 246–254. [Google Scholar]
- Zhang, B.; Yao, Y.F.; Ji, J.C. Random Prediction of Surface Settlement of Subway Foundation Pit Based on Wavelet Neural Network. J. Railw. Sci. Eng. 2021, 18, 2899–2906. [Google Scholar]
- Qin, S.W.; Zhang, Y.Q.; Zhang, L.S.; Miao, Q.; Cheng, Q.S.; Su, G.; Sun, J.B. Prediction of Ground Settlement Around Deep Foundation Pit Based on Stacking Model Fusion. J. Jilin Univ. (Earth Sci. Ed.) 2021, 51, 1316–1323. [Google Scholar]
- Li, T.; Yang, T.Y.; Liu, B.; Chen, Q. Surface Settlement Prediction of Subway Tunnels Constructed by Step Method Based on VMD-GRU. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2023, 51, 48–54+62. [Google Scholar]
- Zhang, W.S.; Jia, L.; Yao, R.H.; Sun, L. Prediction of Surface Settlement around Subway Foundation Pit Based on Self-CGRU Model. Rock Soil Mech. 2024, 45, 2474–2482+2491. [Google Scholar]
- Wang, C.B.; Ding, W.Q.; Wang, J. Discussion and Research on Back Analysis Method for Deep Foundation’s Soil Parameters. Chin. J. Undergr. Space Eng. 2011, 7, 1638–1642. [Google Scholar]
- He, G.J.; Xu, G.H.; Gao, H. Application of Clonal Selection Algorithm for Foundation Pit Displacement Back—Analysis. J. Railw. Sci. Eng. 2007, 4, 62–66. [Google Scholar]
- Liu, H.; Yang, B. Inversion Analysis of Retaining Structure in Deep Soft Soil Foundation in Sea. Yangtze River 2016, 47, 57–62. [Google Scholar]
- Xiao, M.Q.; Liu, H.; Peng, C.S.; Gong, S.L.; Yan, P.F. Back Analysis of Deep Soft Soil Parameters Based on Neural Network. Chin. J. Undergr. Space Eng. 2017, 13, 279–286. [Google Scholar]
- Zou, X.S.; Yang, J.S.; Xie, Y.P.; Song, Z.H. Inversion of Typical Stratum Parameters and Optimization of Tunnel Construction Method in Changsha. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2023, 51, 55–62. [Google Scholar]
- Zhou, Y.; Su, W.; Ding, L.; Luo, H.; Love, P.E.D. Predicting Safety Risks in Deep Foundation Pits in Subway Infrastructure Projects: Support Vector Machine Approach. J. Comput. Civ. Eng. 2017, 31, 04017052. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, S.; Zhou, C.; Luo, H. Intelligent Approach Based on Random Forest for Safety Risk Prediction of Deep Foundation Pit in Subway Stations. J. Comput. Civ. Eng. 2019, 33, 05018004. [Google Scholar] [CrossRef]
- Song, B. Safety Evaluation for Deep Foundation Pit Construction in Metro Station Based on DEA-BP Neural Network. China Saf. Sci. J. 2019, 29, 91–96. [Google Scholar]
- Ma, H.Y.; Tong, L.Y.; Fang, R.Q.; Su, A.; Wu, S.; Bai, K. Confined Water Risk Analysis and Evaluation in Deep Foundation Pit Based on Bayesian Network. J. Civ. Environ. Eng. 2024, 46, 80–88. [Google Scholar]
- Xia, T.; Cheng, C.; Pang, Q.Z. Safety Risk Warning of Deep Foundation Pit Deformation Based on LSTM. Earth Sci. 2023, 48, 3925–3931. [Google Scholar]
- Wei, X.; Chen, R.; Cheng, S.T.; Zhu, M.; Wang, Z.J. Stability of Deep Foundation Pits in Chengdu Expansive Soil Area with the Influence of Rainfalls and Predictions of Deformation. Rock Soil Mech. 2024, 45, 525–534. [Google Scholar]
- Mao, J.P.; Xu, W. Analysis on Reliability of Rock-Socketed Support Structures in Two Big and Deep Foundation Pits. Chin. J. Undergr. Space Eng. 2009, 5, 1646–1652. [Google Scholar]
- Zhu, H.H.; Ye, X.W.; Ran, L. Reliability Analysis of Deep Excavation Based on Field Monitoring Data. J. Railw. Eng. Soc. 2011, 28, 7–11. [Google Scholar]





| Document | Optimization Algorithm |
|---|---|
| Ren [55] | Sparrow search algorithm |
| Sun et al. [56] | Improved mind evolutionary algorithm |
| Zhang [57] | Sparrow search algorithm |
| Guo et al. [58] | Genetic algorithm |
| Zhou et al. [48] | Adaptive mutation–sparrow search algorithm |
| Prediction Model | Advantage | Insufficient |
|---|---|---|
| BP model | (1) Strong nonlinear mapping capabilities. (2) High prediction accuracy for short-term surrounding surface subsidence deformation. (3) A certain degree of fault tolerance. | (1) Prone to converge with local minima. (2) Long-term deformation prediction accuracy is relatively low. (3) Blind randomness of parameter selection. |
| Elman model | (1) Effectively process time series data. (2) Captures the time-dynamic characteristics of foundation pit deformation. (3) Storage and utilization of historical information. | (1) Less training data, easy to overfit. (2) Blind randomness of parameter selection. |
| LSTM model | (1) Effectively processing and memorizing long-term sequence data. (2) Avoids the problem of gradient disappearance or gradient explosion. (3) Analysis of deformation prediction under the combined action of multiple factors. | (1) Less training data, lower prediction accuracy. (2) Needs a lot of data and calculation data to train. (3) Key parameters are difficult to determine. |
| SVM model | (1) Solves the problem of high dimension. (2) Completes theoretical basis and system. (3) Small sample data prediction accuracy is high. | (1) Difficult to handle large-scale data. (2) Difficult to deal with unbalanced data. (3) Difficult to select kernel functions and related parameters. |
| BN model | (1) Graphic visualization, easy to understand. (2) Effectively deals with uncertainty for risk analysis. | (1) Dependence on prior probability. (2) Structure is more complex. |
| Combinatorial model | (1) Suitable for high-precision requirements of the project. (2) Effectively deals with outliers and noise, the stability and robustness of the model are high. (3) The principle of the partial optimization algorithm is simple, and the parameters are set lower. | (1) The model is complex and the parameter tuning is difficult. (2) The partially optimized model still has the risk of overfitting. (3) Partial optimization algorithms only consider the local optimum, not the global optimum. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Qin, Z.; Bai, X.; Hao, Z.; Yan, N.; Han, J. Research Progress of Machine Learning in Deep Foundation Pit Deformation Prediction. Buildings 2025, 15, 852. https://doi.org/10.3390/buildings15060852
Wang X, Qin Z, Bai X, Hao Z, Yan N, Han J. Research Progress of Machine Learning in Deep Foundation Pit Deformation Prediction. Buildings. 2025; 15(6):852. https://doi.org/10.3390/buildings15060852
Chicago/Turabian StyleWang, Xiang, Zhichao Qin, Xiaoyu Bai, Zengming Hao, Nan Yan, and Jianyong Han. 2025. "Research Progress of Machine Learning in Deep Foundation Pit Deformation Prediction" Buildings 15, no. 6: 852. https://doi.org/10.3390/buildings15060852
APA StyleWang, X., Qin, Z., Bai, X., Hao, Z., Yan, N., & Han, J. (2025). Research Progress of Machine Learning in Deep Foundation Pit Deformation Prediction. Buildings, 15(6), 852. https://doi.org/10.3390/buildings15060852