
Hybrid Metaheuristic Optimization of HVAC Energy Consumption and Thermal Comfort in an Office Building Using EnergyPlus

 , ,
, ,
Abstract
1. Introduction
1.1. Background
1.2. Objectives
2. State-of-the-Art
2.1. Building Energy Optimization Methods
2.2. Energy Simulation Optimizations
2.3. Machine Learning-Based Methods
2.4. Multi-Objective and Hybrid Energy Optimizations
2.5. Energy Optimization in Other Scopes
3. Methodology
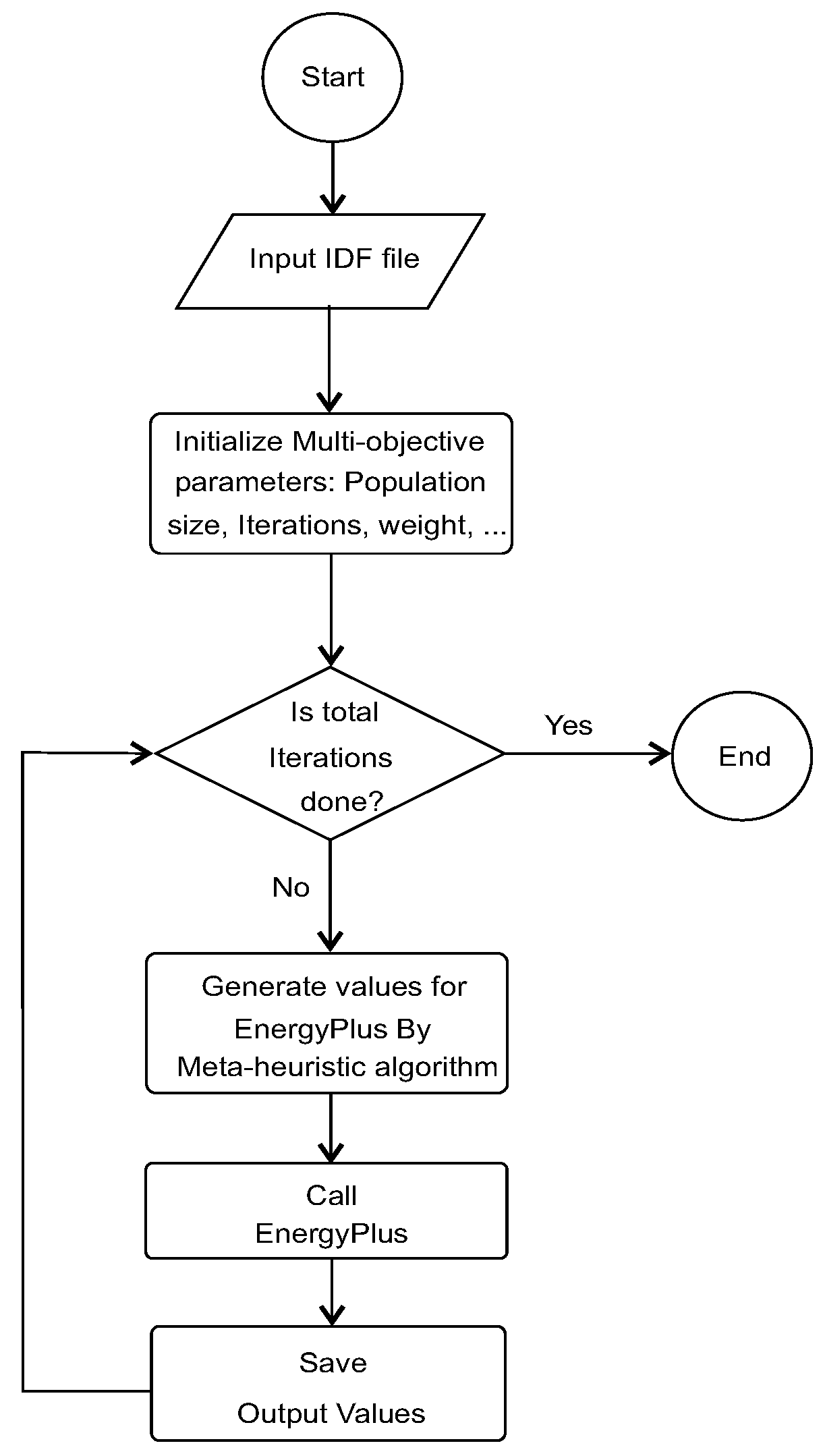
3.1. EnergyPlus Simulations
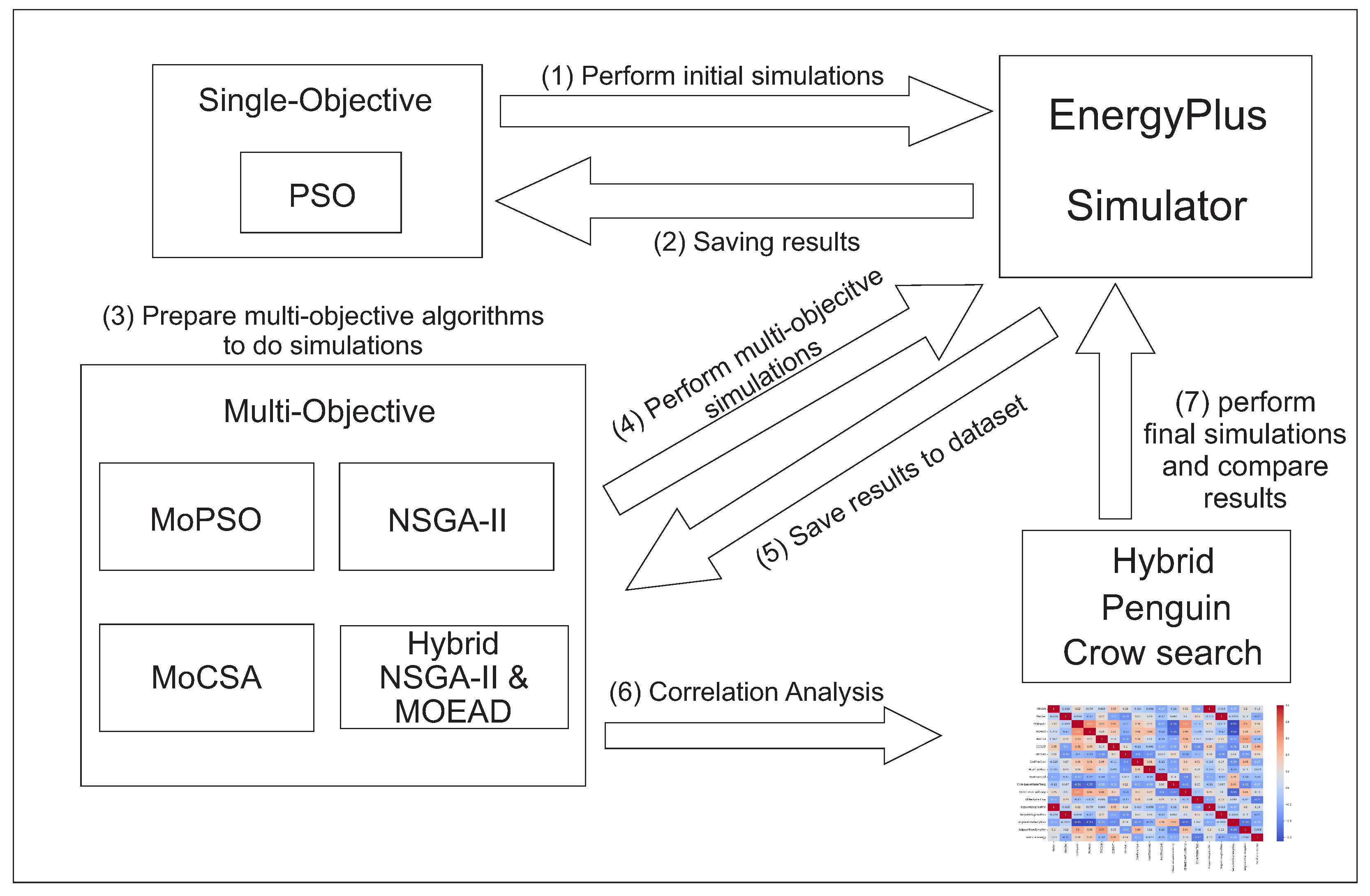
3.2. Meta-Heuristic Algorithms
3.2.1. Particle Swarm Optimization (PSO)
| Algorithm 1 Particle Swarm Optimization (PSO) |
|
3.2.2. Multi-Objective Crow Search Optimization (MoCsa)
| Algorithm 2 Crow Search Algorithm (CSA) |
|
| Algorithm 3 Update Memory (CSA) |
|
3.3. Proposed Method
3.3.1. Penguin Search Optimization Algorithm
| Algorithm 4 Penguin Search Optimization Algorithm (POA) |
|
| Algorithm 5 Hybird Crow, Penguin Search Algorithm |
|
3.3.2. Energy
3.3.3. Thermal Comfort
3.3.4. Objective Function
4. Experiments and Results
4.1. Computational Complexity
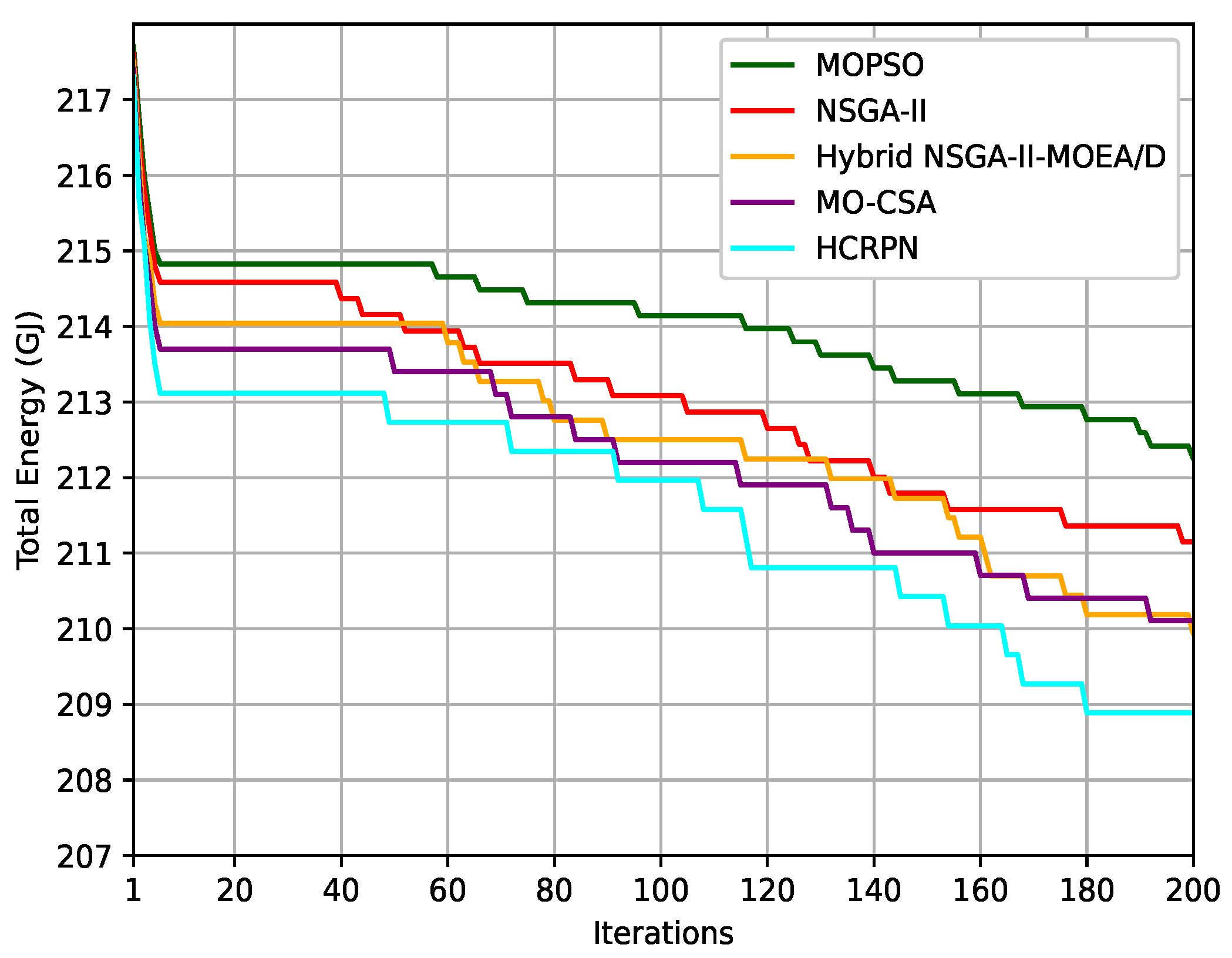
4.2. Convergence Analysis
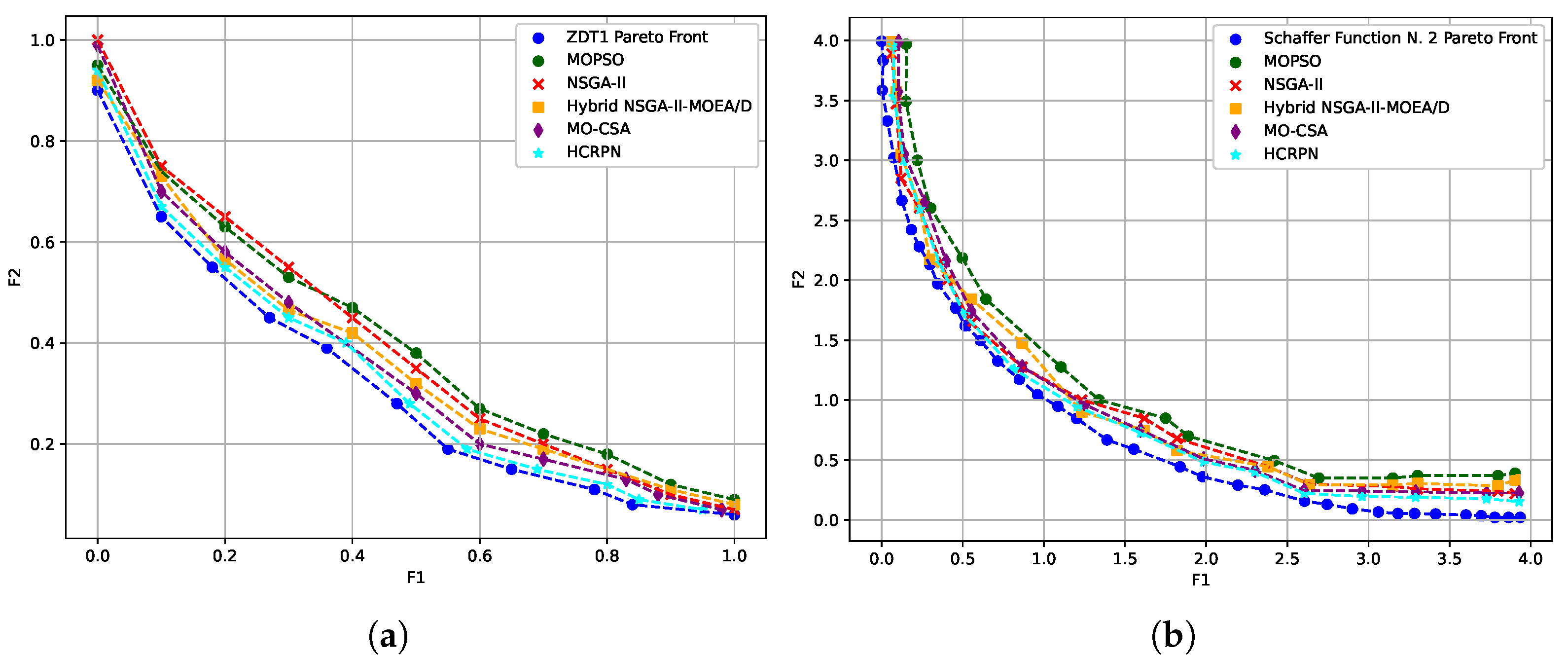
4.3. Benchmark Functions
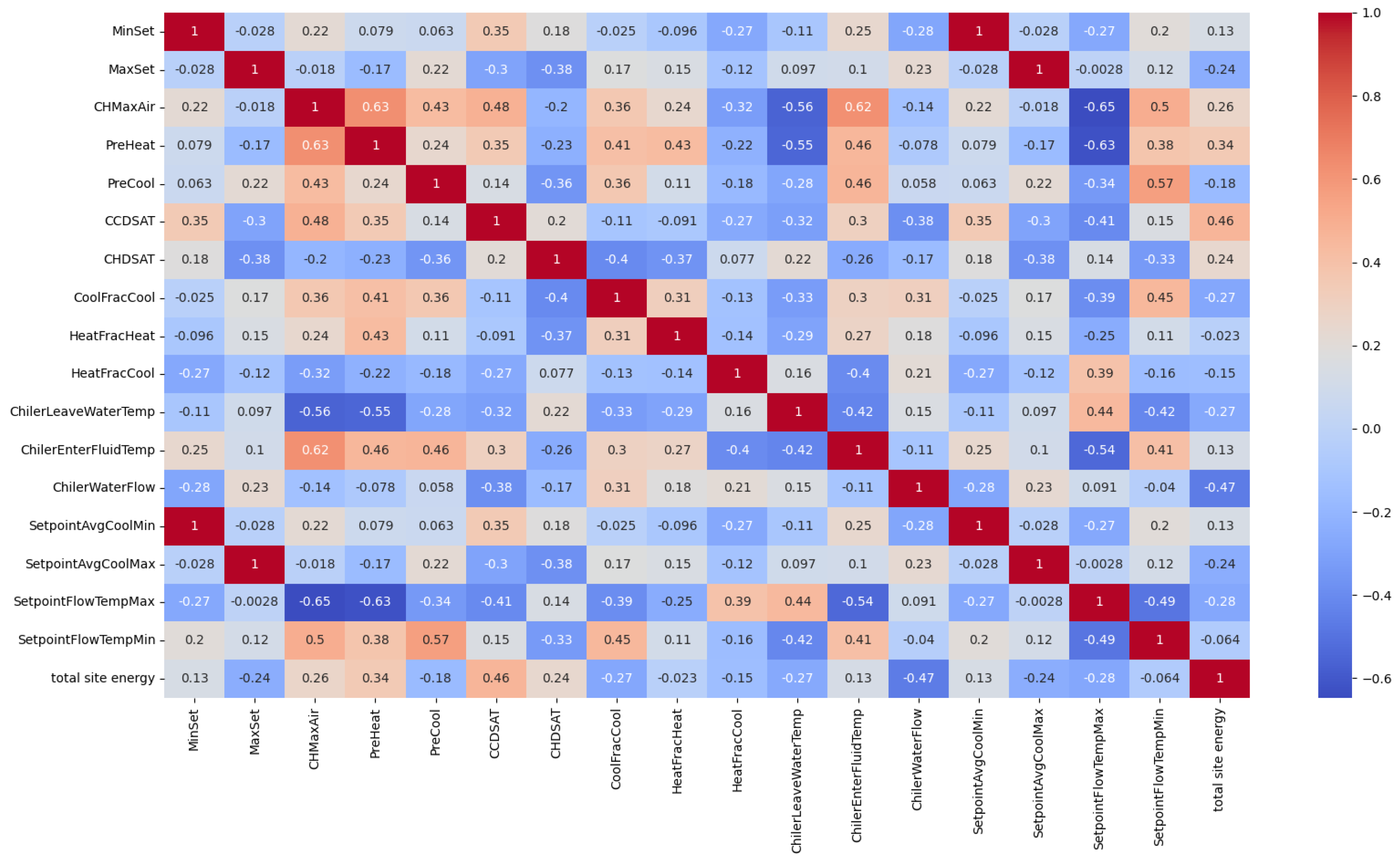
4.4. Correlation Analysis
4.5. Hyperparameters
4.6. Energy and MRT Experiments Setup
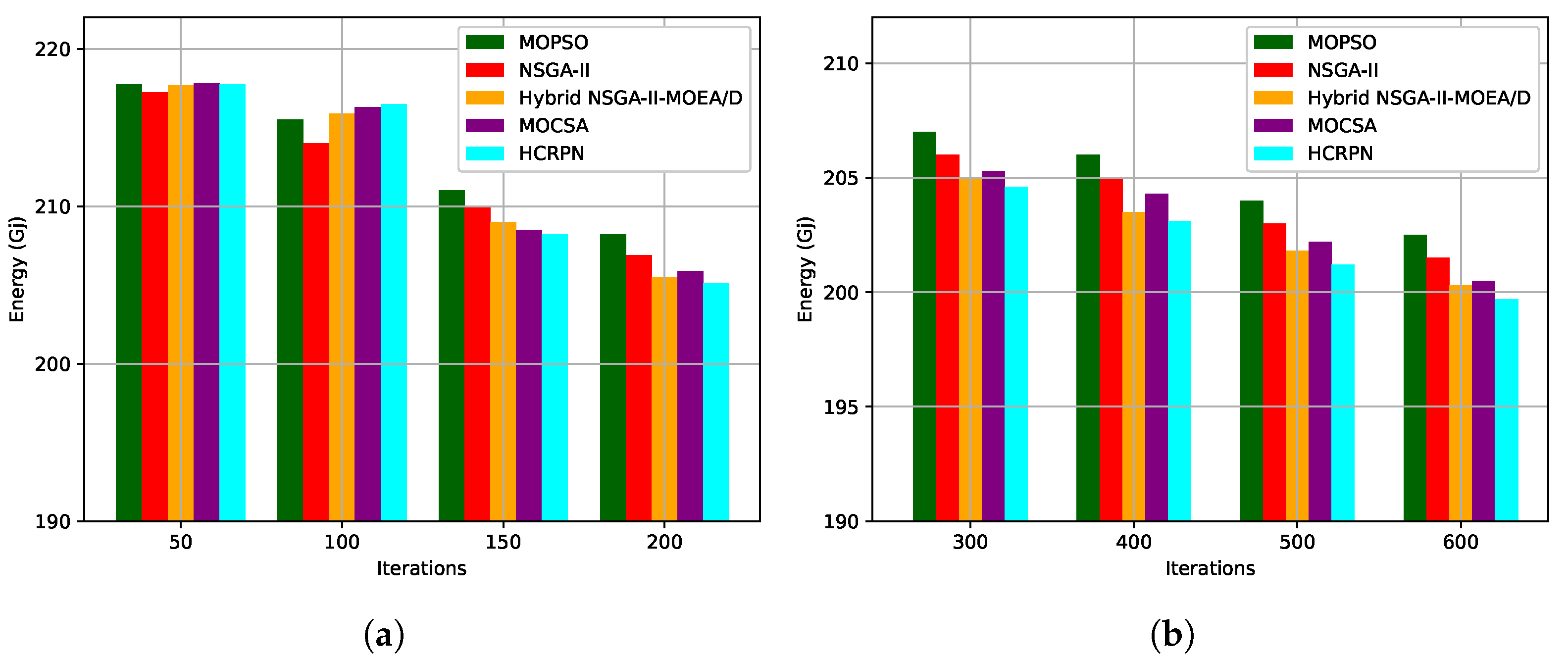
4.7. Energy Comparison
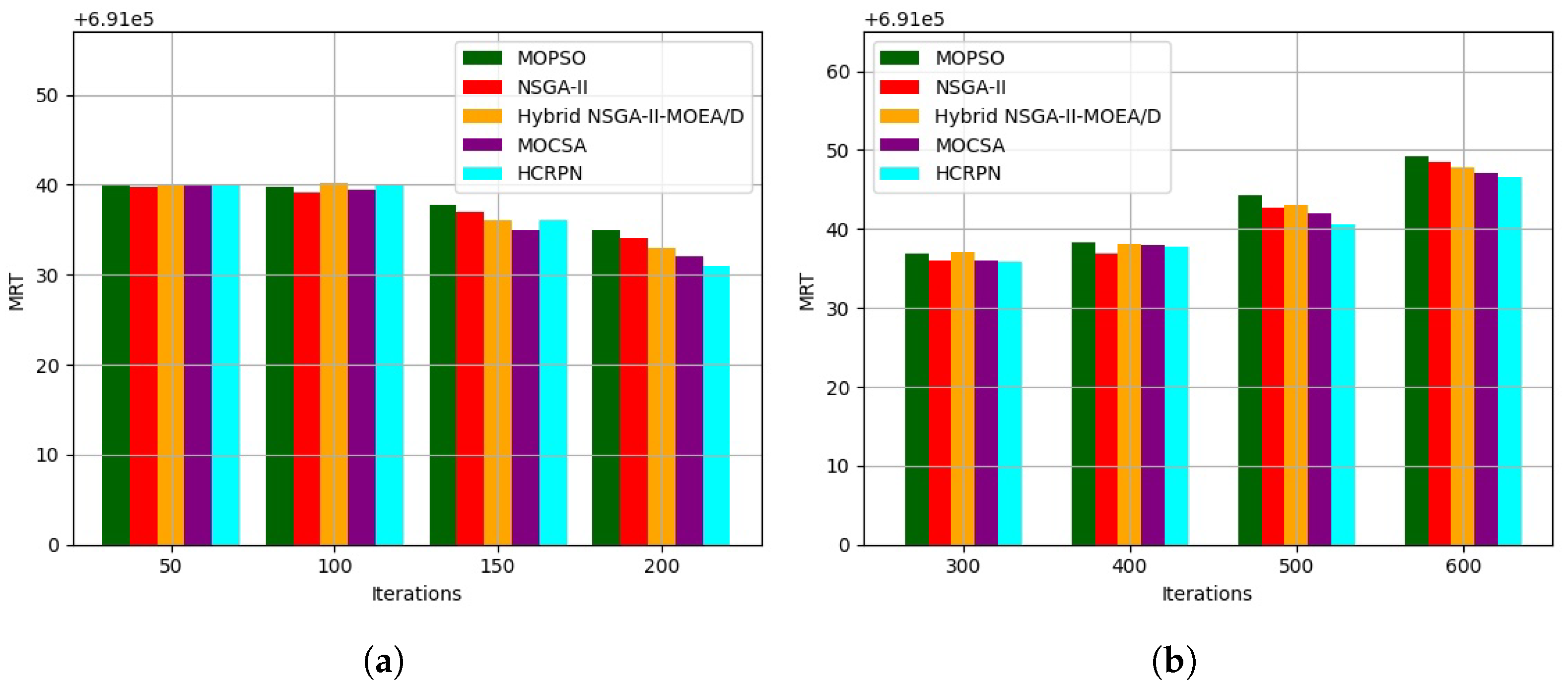
4.8. MRT Comparison
5. Conclusions
6. Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, Z.; Zhang, W.; Tang, R.; Wang, H.; Korolija, I. Reinforcement learning in building controls: A comparative study of algorithms considering model availability and policy representation. J. Build. Eng. 2024, 90, 109497. [Google Scholar] [CrossRef]
- Dogan, A.; Kayaci, N.; Kanbur, B.B.; Demir, H. Experimental investigation of mean radiant temperature trends for a ground source heat pump-integrated radiant wall and ceiling heating system. Buildings 2023, 13, 2420. [Google Scholar] [CrossRef]
- Huerto-Cardenas, H.; Leonforte, F.; Aste, N.; Del Pero, C.; Evola, G.; Costanzo, V.; Lucchi, E. Validation of dynamic hygrothermal simulation models for historical buildings: State of the art, research challenges and recommendations. Build. Environ. 2020, 180, 107081. [Google Scholar] [CrossRef]
- D’Agostino, D.; Minelli, F.; Minichiello, F. HVAC System Energy Retrofit for a University Lecture Room Considering Private and Public Interests. Energies 2025, 18, 1526. [Google Scholar] [CrossRef]
- Mokhberi, P.; Mokhberi, P.; Izadi, M.; Nesaii, M.B.; Yaici, W.; Minelli, F. Thermal regulation enhancement in multi-story office buildings: Integrating phase change materials into inter-floor void formers. Case Stud. Therm. Eng. 2024, 60, 104792. [Google Scholar] [CrossRef]
- D’Agostino, D.; Minelli, F.; Minichiello, F.; Musella, M. Improving the indoor air quality of office buildings in the post-pandemic era—impact on energy consumption and costs. Energies 2024, 17, 855. [Google Scholar] [CrossRef]
- d’Ambrosio Alfano, F.R.; Olesen, B.W.; Pepe, D.; Palella, B.I. Working with different building energy performance tools: From input data to energy and indoor temperature predictions. Energies 2023, 16, 743. [Google Scholar] [CrossRef]
- Gao, Y.; Peng, L.; Li, F.; Liu, M.; Li, W. Multi-objective opposition-based learning fully informed particle swarm optimizer with favour ranking. In Proceedings of the 2013 IEEE International Conference on Granular Computing (GrC), Beijing, China, 13–15 December 2013; pp. 114–119. [Google Scholar]
- Kouka, N.; Fdhila, R.; Hussain, A.; Alimi, A.M. Dynamic Multi Objective Particle Swarm optimization with Cooperative Agents. In Proceedings of the 2020 IEEE Congress on Evolutionary Computation (CEC), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]
- Akraminejad, R.; Khaledian, N.; Nazari, A.; Voelp, M. A multi-objective crow search algorithm for optimizing makespan and costs in scientific cloud workflows (CSAMOMC). Computing 2024, 106, 1777–1793. [Google Scholar] [CrossRef]
- Askarzadeh, A. A novel metaheuristic method for solving constrained engineering optimization problems: Crow search algorithm. Comput. Struct. 2016, 169, 1–12. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, H. MOEA/D: A Multiobjective Evolutionary Algorithm Based on Decomposition. IEEE Trans. Evol. Comput. 2007, 11, 712–731. [Google Scholar] [CrossRef]
- Srinath, N.; Yilmazlar, I.O.; Kurz, M.E.; Taaffe, K. Hybrid multi-objective evolutionary meta-heuristics for a parallel machine scheduling problem with setup times and preferences. Comput. Ind. Eng. 2023, 185, 109675. [Google Scholar] [CrossRef]
- Vaseghi, A.; Capano, C.D. Comparative analysis of insulation strategies for improving thermal performance of wall to parkade suspended slab. Energy Built Environ. 2025, 6, 147–160. [Google Scholar] [CrossRef]
- Kheiri, F. A review on optimization methods applied in energy-efficient building geometry and envelope design. Renew. Sustain. Energy Rev. 2018, 92, 897–920. [Google Scholar] [CrossRef]
- Chen, Z.; Cui, Y.; Zheng, H.; Ning, Q. Optimization and prediction of energy consumption, light and thermal comfort in teaching building atriums using NSGA-II and machine learning. J. Build. Eng. 2024, 86, 108687. [Google Scholar] [CrossRef]
- Wagiman, K.R.; Abdullah, M.N.; Hassan, M.Y.; Mohammad Radzi, N.H. A new metric for optimal visual comfort and energy efficiency of building lighting system considering daylight using multi-objective particle swarm optimization. J. Build. Eng. 2021, 43, 102525. [Google Scholar] [CrossRef]
- Homod, R.Z.; Yaseen, Z.M.; Hussein, A.K.; Almusaed, A.; Alawi, O.A.; Falah, M.W.; Abdelrazek, A.H.; Ahmed, W.; Eltaweel, M. Deep clustering of cooperative multi-agent reinforcement learning to optimize multi chiller HVAC systems for smart buildings energy management. J. Build. Eng. 2023, 65, 105689. [Google Scholar] [CrossRef]
- Nasruddin; Sholahudin; Satrio, P.; Mahlia, T.M.I.; Giannetti, N.; Saito, K. Optimization of HVAC system energy consumption in a building using artificial neural network and multi-objective genetic algorithm. Sustain. Energy Technol. Assessments 2019, 35, 48–57. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef] [PubMed]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-international conference on neural networks, Perth, WA, Australia, 27 November–1 December 1995; IEEE: Piscataway Township, NJ, USA, 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Awadallah, M.A.; Makhadmeh, S.N.; Al-Betar, M.A.; Dalbah, L.M.; Al-Redhaei, A.; Kouka, S.; Enshassi, O.S. Multi-objective Ant Colony Optimization. Arch. Comput. Methods Eng. 2024, 32, 995–1037. [Google Scholar] [CrossRef]
- Pan, Y.; Zhu, M.; Lv, Y.; Yang, Y.; Liang, Y.; Yin, R.; Yang, Y.; Jia, X.; Wang, X.; Zeng, F.; et al. Building energy simulation and its application for building performance optimization: A review of methods, tools, and case studies. Adv. Appl. Energy 2023, 10, 100135. [Google Scholar] [CrossRef]
- Oueslati, F. Hybrid renewable system based on solar wind and fuel cell energies coupled with diesel engines for Tunisian climate: TRNSYS simulation and economic assessment. Int. J. Green Energy 2021, 18, 402–423. [Google Scholar] [CrossRef]
- Zhang, C.; Ma, L.; Luo, Z.; Han, X.; Zhao, T. Forecasting building plug load electricity consumption employing occupant-building interaction input features and bidirectional LSTM with improved swarm intelligent algorithms. Energy 2024, 288, 129651. [Google Scholar] [CrossRef]
- Zhang, C.; Luo, Z.; Rezgui, Y.; Zhao, T. Enhancing building energy consumption prediction introducing novel occupant behavior models with sparrow search optimization and attention mechanisms: A case study for forty-five buildings in a university community. Energy 2024, 294, 130896. [Google Scholar] [CrossRef]
- Dsilva Winfred Rufuss, D.; Sonu Ashritha, K.; Suganthi, L. Green energy revolution: A unique approach for energy forecasting and optimization towards sustainable energy planning and social development. Environ. Dev. Sustain. 2024, 1–28. [Google Scholar] [CrossRef]
- Qiao, X.; Zhao, T.; Zhang, X.; Li, Y. Multi-objective optimization of building integrated photovoltaic windows in office building. Energy Build. 2024, 318, 114459. [Google Scholar] [CrossRef]
- Wang, H.; Chen, B.; Sun, H.; Li, A.; Zhou, C. AnFiS-MoH: Systematic exploration of hybrid ANFIS frameworks via metaheuristic optimization hybridization with evolutionary and swarm-based algorithms. Appl. Soft Comput. 2024, 167, 112334. [Google Scholar] [CrossRef]
- Delavar, A.G.; Akraminejad, R.; Mozafari, S. HDECO: A method for Decreasing energy and cost by using virtual machine migration by considering hybrid parameters. Comput. Commun. 2022, 195, 49–60. [Google Scholar] [CrossRef]
- Ghorbannia Delavar, A.; Akraminejad, R.; Mozafari, S. WSTMOS: A Method For Optimizing Throughput, Energy, And Latency In Cloud Workflow Scheduling. J. Inf. Commun. Technol. 2023, 57, 62. [Google Scholar]
- Delavar, A.G.; Akraminejad, R.; Kazemipour, F. MHSC: A meta-heuristic method to optimize throughput and energy using sensitivity rate computing. Future Gener. Comput. Syst. 2025, 166, 107624. [Google Scholar] [CrossRef]
- Delavar, A.G.; Bagheri, H. EDLIoT: A method for decreasing energy consumption and latency using scheduling algorithm in Internet of Things. J. Ind. Inf. Integr. 2024, 42, 100719. [Google Scholar] [CrossRef]
- GhorbanniaDelavar, A.; Jormand, Z. FMORT: The Meta-Heuristic routing method by integrating index parameters to optimize energy consumption and real execution time using FANET. Comput. Networks 2024, 255, 110869. [Google Scholar] [CrossRef]
- Khaledian, N.; Khamforoosh, K.; Azizi, S.; Maihami, V. IKH-EFT: An improved method of workflow scheduling using the krill herd algorithm in the fog-cloud environment. Sustain. Comput. Informatics Syst. 2023, 37, 100834. [Google Scholar] [CrossRef]
- Khaledian, N.; Khamforoosh, K.; Akraminejad, R.; Abualigah, L.; Javaheri, D. An energy-efficient and deadline-aware workflow scheduling algorithm in the fog and cloud environment. Computing 2024, 106, 109–137. [Google Scholar] [CrossRef]
- Khaledian, N.; Razzaghzadeh, S.; Haghbayan, Z.; Völp, M. Hybrid Markov chain-based dynamic scheduling to improve load balancing performance in fog-cloud environment. Sustain. Comput. Informatics Syst. 2025, 45, 101077. [Google Scholar] [CrossRef]
- Kosari, S.; Hosseini Shirvani, M.; Khaledian, N.; Javaheri, D. A Hybrid Discrete Grey Wolf Optimization Algorithm Imbalance-ness Aware for Solving Two-dimensional Bin-packing Problems. J. Grid Comput. 2024, 22, 1–36. [Google Scholar] [CrossRef]
- Abbasi, S.; Khaledian, N.; Rahmani, A.M. Trust management in the internet of vehicles: A systematic literature review of blockchain integration. Int. J. Inf. Secur. 2024, 23, 3065–3088. [Google Scholar] [CrossRef]
- Energyplus, I. EnergyPlus™ Version 23.1.0 Documentation. 2023. Available online: https://energyplus.net/assets/nrel_custom/pdfs/pdfs_v23.1.0/GettingStarted.pdf (accessed on 28 March 2023).
- Bannoud, M.A.; da Silva, C.A.M.; Martins, T.D. Applications of metaheuristic optimization algorithms in model predictive control for chemical engineering processes: A systematic review. Annu. Rev. Control 2024, 58, 100973. [Google Scholar] [CrossRef]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization: An overview. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Nobahari, H.; Bighashdel, A. MOCSA: A Multi-Objective Crow Search Algorithm for Multi-Objective optimization. In Proceedings of the 2017 2nd Conference on Swarm Intelligence and Evolutionary Computation (CSIEC), Kerman, Iran, 7–9 March 2017; pp. 60–65. [Google Scholar]
- Marler, R.T.; Arora, J.S. The weighted sum method for multi-objective optimization: New insights. Struct. Multidiscip. Optim. 2010, 41, 853–862. [Google Scholar] [CrossRef]
- Wilm, T.; Normann, P.; Stepprath, F. Pareto Front Approximation for Multi-Objective Session-Based Recommender Systems. In Proceedings of the 18th ACM Conference on Recommender Systems, Bari, Italy, 14–18 October 2024; pp. 809–812. [Google Scholar]
- Bao, C.; Xu, L.; Goodman, E.D.; Cao, L. A novel non-dominated sorting algorithm for evolutionary multi-objective optimization. J. Comput. Sci. 2017, 23, 31–43. [Google Scholar] [CrossRef]
- Singh, H.; Tyagi, S.; Kumar, P. Crow–penguin optimizer for multiobjective task scheduling strategy in cloud computing. Int. J. Commun. Syst. 2020, 33, e4467. [Google Scholar] [CrossRef]
- Gheraibia, Y.; Moussaoui, A.; Yin, P.Y.; Papadopoulos, Y.; Maazouzi, S. PeSOA: Penguins search optimisation algorithm for global optimisation problems. arXiv 2018, arXiv:1809.09895. [Google Scholar]
- Gheraibia, Y.; Moussaoui, A. Penguins search optimization algorithm (PeSOA). In Proceedings of the Recent Trends in Applied Artificial Intelligence: 26th International Conference on Industrial, Engineering and Other Applications of Applied Intelligent Systems, IEA/AIE 2013, Amsterdam, The Netherlands, 17–21 June 2013; Proceedings 26; Springer: Berlin/Heidelberg, Germany, 2013; pp. 222–231. [Google Scholar]
- Li, R. A true random number generator algorithm from digital camera image noise for varying lighting conditions. In Proceedings of the SoutheastCon 2015, Fort Lauderdale, FL, USA, 9–12 April 2015; IEEE: Piscataway Township, NJ, USA, 2015; pp. 1–8. [Google Scholar]
- Akraminejad, R.; Kazemipour, F.; Davoodi, M.K. A Hybrid Crow Search And Penguin Optimization Algorithm (CPMM) for Efficient Cloud Workflow Scheduling. In Proceedings of the 2024 15th International Conference on Information and Knowledge Technology (IKT), Isfahan, Iran, 24–26 December 2024; pp. 121–126. [Google Scholar]
- Coello Coello, C.; Lechuga, M. MOPSO: A proposal for multiple objective particle swarm optimization. In Proceedings of the 2002 Congress on Evolutionary Computation, CEC’02 (Cat. No.02TH8600), Honolulu, HI, USA, 12–17 May 2002; Volume 2, pp. 1051–1056. [Google Scholar]
- Alfano, F.R.d.; Pepe, D.; Riccio, G.; Vio, M.; Palella, B.I. On the effects of the mean radiant temperature evaluation in the assessment of thermal comfort by dynamic energy simulation tools. Build. Environ. 2023, 236, 110254. [Google Scholar] [CrossRef]
- ASHRAE 189.1-2009; Standard for the design of high-performance green buildings. ASHRAE: Peachtree Corners, GA, USA, 2017.
- Knowles, J.D.; Corne, D.W. Approximating the nondominated front using the Pareto archived evolution strategy. Evol. Comput. 2000, 8, 149–172. [Google Scholar] [CrossRef] [PubMed]
- Coello, C.A.C.; Pulido, G.T.; Lechuga, M.S. Handling multiple objectives with particle swarm optimization. IEEE Trans. Evol. Comput. 2004, 8, 256–279. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| Velocity of particle i in dimension d at iteration t | |
| w | Inertia weight of the particle |
| , | Acceleration coefficients |
| , | Random numbers in the range [0, 1] |
| Best position of particle i in dimension d | |
| Local position of particle i in dimension d at iteration t | |
| Global best position in dimension d | |
| Awareness property of crow i | |
| Fly length of crow i | |
| , | Lower and upper bounds of search space of crows |
| Position of penguin j allocated to the i-th group at the t-th instance | |
| Oxygen reserve of the j-th penguin of the i-th group | |
| Best solution found by the i-th group of penguins | |
| Total energy consumption | |
| Sum of the energy used for cooling | |
| Energies consumed for interior lighting | |
| Energies consumed for interior equipments | |
| Fans’ energies | |
| Pumps’ energies | |
| Heat rejection energies | |
| View factor between surface i and surface j | |
| Temperature of surface j | |
| Area of surface j | |
| Hyper-volume |
| Parameter | Description |
|---|---|
| Minimum Setpoint Temperature | |
| Maximum Setpoint Temperature | |
| Central Heating Maximum System Air Flow Ratio | |
| Preheat Design Temperature | |
| Precool Design Temperature | |
| Central Cooling Design Supply Air Temperature | |
| Central Heating Design Supply Air Temperature | |
| Cooling Fraction of Autosized Cooling | |
| Supply Air Flow Rate | |
| Heating Fraction of Autosized Heating | |
| Supply Air Flow Rate | |
| Heating Fraction of Autosized Cooling | |
| Supply Air Flow Rate | |
| Chiller:Electric:EIR Reference Leaving Chilled | |
| Water Temperature | |
| Chiller:Electric:EIR Reference Entering Condenser | |
| Fluid Temperature | |
| Chiller:Electric:EIR Reference Chilled Water | |
| Flow Rate | |
| SetpointManager:MultiZone:Cooling:Average | |
| Minimum Setpoint Temperature | |
| SetpointManager:MultiZone:Cooling:Average | |
| Maximum Setpoint Temperature | |
| SetpointManager:FollowOutdoorAirTemperature | |
| Maximum Setpoint Temperature | |
| SetpointManager:FollowOutdoorAirTemperature | |
| Minimum Setpoint Temperature |
| Parameter | Value | Description |
|---|---|---|
| 40 | Number of crows | |
| 0.21 | Crow awareness radius | |
| 0.35 | Crow awareness wight coefficient | |
| 100 | Number of iterations in crow search | |
| K | 4 | Number of zones for penguins group |
| N | 40 | Number of penguins |
| 100 | Number of iterations in crow search |
| Iteration | 50 | 100 | 150 | 200 | 300 | 400 | 500 | 600 |
|---|---|---|---|---|---|---|---|---|
| MOPSO | 217.75 (1.5) | 215.5 (1.1) | 211 (0.75) | 208.2 (0.3) | 207 (1.5) | 206 (1.1) | 204 (2) | 202.5 (0.7) |
| NSGA-II | 217.25 (0.2) | 214 (0.7) | 210 (0.2) | 206.9 (0.8) | 206 (0.3) | 205 (1.2) | 203 (2) | 201.5 (0.9) |
| Hybrid NSGA-II MOEAD/D | 217.68 (0.8) | 215.9 (0.9) | 209 (0.6) | 205.5 (1.1) | 205 (2.5) | 203.5 (1.1) | 201.8 (0.7) | 200.3 (0.4) |
| MOCSA | 217.8 (0.6) | 216.3 (1.1) | 208.5 (0.3) | 205.9 (0.3) | 205.3 (1) | 204.3 (0.8) | 202.2 (1.4) | 200.5 (1.2) |
| HCRPN | 217.75 (0.4) | 216.5 (0.5) | 208.2 (0.8) | 205.1 (0.3) | 204.6 (1.1) | 203.1 (0.8) | 201.2 (0.6) | 199.7 (0.1) |
| Average of 4 algorithms | 217.62 | 215.425 | 209.625 | 206.625 | 205.825 | 204.7 | 202.75 | 201.2 |
| Improvement in percent (%) | 0 | 0 | 0.67 | 0.73 | 0.59 | 0.78 | 0.76 | 0.74 |
| Iteration | 50 | 100 | 150 | 200 | 300 | 400 | 500 | 600 |
|---|---|---|---|---|---|---|---|---|
| MOPSO | 691,040 (5.4) | 691,039.7 (6.5) | 691,037.8 (7) | 691,035 (3.7) | 691,036.8 (8) | 691,038.3 (2.8) | 691,044.2 (3.5) | 691,049.2 (2.5) |
| NSGA-II | 691,039.7 (1.3) | 691,039.1 (2.5) | 691,037 (0.5) | 691,034 (4.2) | 691,036 (3.9) | 691,036.8 (2.7) | 691,042.6 (6.5) | 691,048.5 (8.9) |
| Hybrid NSGA-II MOEAD/D | 691,039.9 (6.5) | 691,040.2 (5.4) | 691,036 (2.1) | 691,033 (3.1) | 691,037 (7.3) | 691,038.2 (2.1) | 691,043 (0.7) | 691,047.8 (1.5) |
| MOCSA | 691,040.1 (2.5) | 691,039.4 (4.3) | 691,035 (1.2) | 691,032 (7.3) | 691,036 (3.4) | 691,038 (4.5) | 691,042 (1.2) | 691,047 (0.6) |
| HCRPN | 691,040 (6.7) | 691,040 (2.5) | 691,036 (3.1) | 691,031 (1.2) | 691,035.8 (0.5) | 691,037.8 (3.4) | 691,040.5 (1.2) | 691,046.5 (1.1) |
| Average of 4 algorithms | 691,040 | 691,039.6 | 691,036.4 | 691,033.5 | 691,036.4 | 691,037.8 | 691,042.9 | 691,048.1 |
| Improvement in percent (%) | 0 | 0 | 6.5 × 10−5 | 0.00036 | 9.4 × 10−5 | 3.6 × 10−6 | 0.00035 | 0.00023 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akraminejad, R.; Zhao, T.; Rezgui, Y.; Ghoroghi, A.; Shahbazi Razlighi, Y. Hybrid Metaheuristic Optimization of HVAC Energy Consumption and Thermal Comfort in an Office Building Using EnergyPlus. Buildings 2025, 15, 2568. https://doi.org/10.3390/buildings15142568
Akraminejad R, Zhao T, Rezgui Y, Ghoroghi A, Shahbazi Razlighi Y. Hybrid Metaheuristic Optimization of HVAC Energy Consumption and Thermal Comfort in an Office Building Using EnergyPlus. Buildings. 2025; 15(14):2568. https://doi.org/10.3390/buildings15142568
Chicago/Turabian StyleAkraminejad, Reza, Tianyi Zhao, Yacine Rezgui, Ali Ghoroghi, and Yousef Shahbazi Razlighi. 2025. "Hybrid Metaheuristic Optimization of HVAC Energy Consumption and Thermal Comfort in an Office Building Using EnergyPlus" Buildings 15, no. 14: 2568. https://doi.org/10.3390/buildings15142568
APA StyleAkraminejad, R., Zhao, T., Rezgui, Y., Ghoroghi, A., & Shahbazi Razlighi, Y. (2025). Hybrid Metaheuristic Optimization of HVAC Energy Consumption and Thermal Comfort in an Office Building Using EnergyPlus. Buildings, 15(14), 2568. https://doi.org/10.3390/buildings15142568