
Cable Force Optimization in Cable-Stayed Bridges Using Gaussian Process Regression and an Enhanced Whale Optimization Algorithm
Abstract
1. Introduction
2. Proposed Method: GPR-Based Modeling and EWOSSA Optimization
2.1. Gaussian Process Regression (GPR)
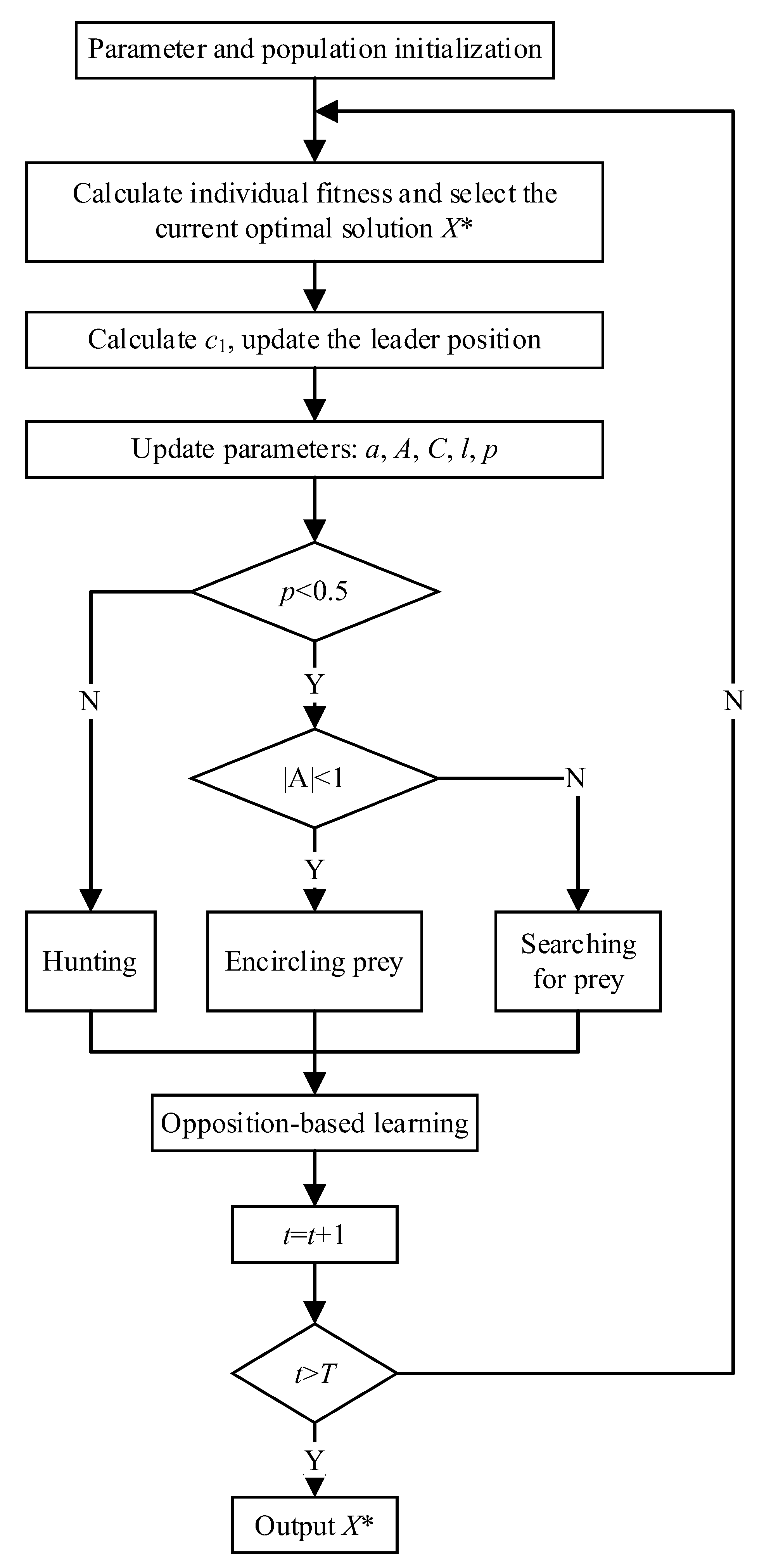
2.2. Enhanced Whale Optimization Algorithm with Salp Swarm Algorithm (EWOSSA)
2.2.1. Encircling Prey Mechanism
2.2.2. Bubble-Net Attacking Mechanism
2.2.3. Global Exploration Strategy
2.2.4. Population Diversity Enhancements
2.2.5. Validation of the Enhanced Algorithm
- In the early stage, the EWOSSA benefits from the SSA leader position updating mechanism, providing the population with superior guidance and a more accurate optimization direction. This results in a better initial convergence path and faster optimization progress.
- During the middle optimization period, the nonlinear parameter c1 from the SSA transforms the position updating process from linear to nonlinear, effectively expanding the search range and improving exploration.
- In the later optimization stages, the Lens Opposition-based Learning strategy helps the current optimal solution escape local optima, allowing continued progress toward the global optimum.
3. Optimizing Cable Forces Using EWOSSA-GPR
3.1. Mathematical Framework and Constraints
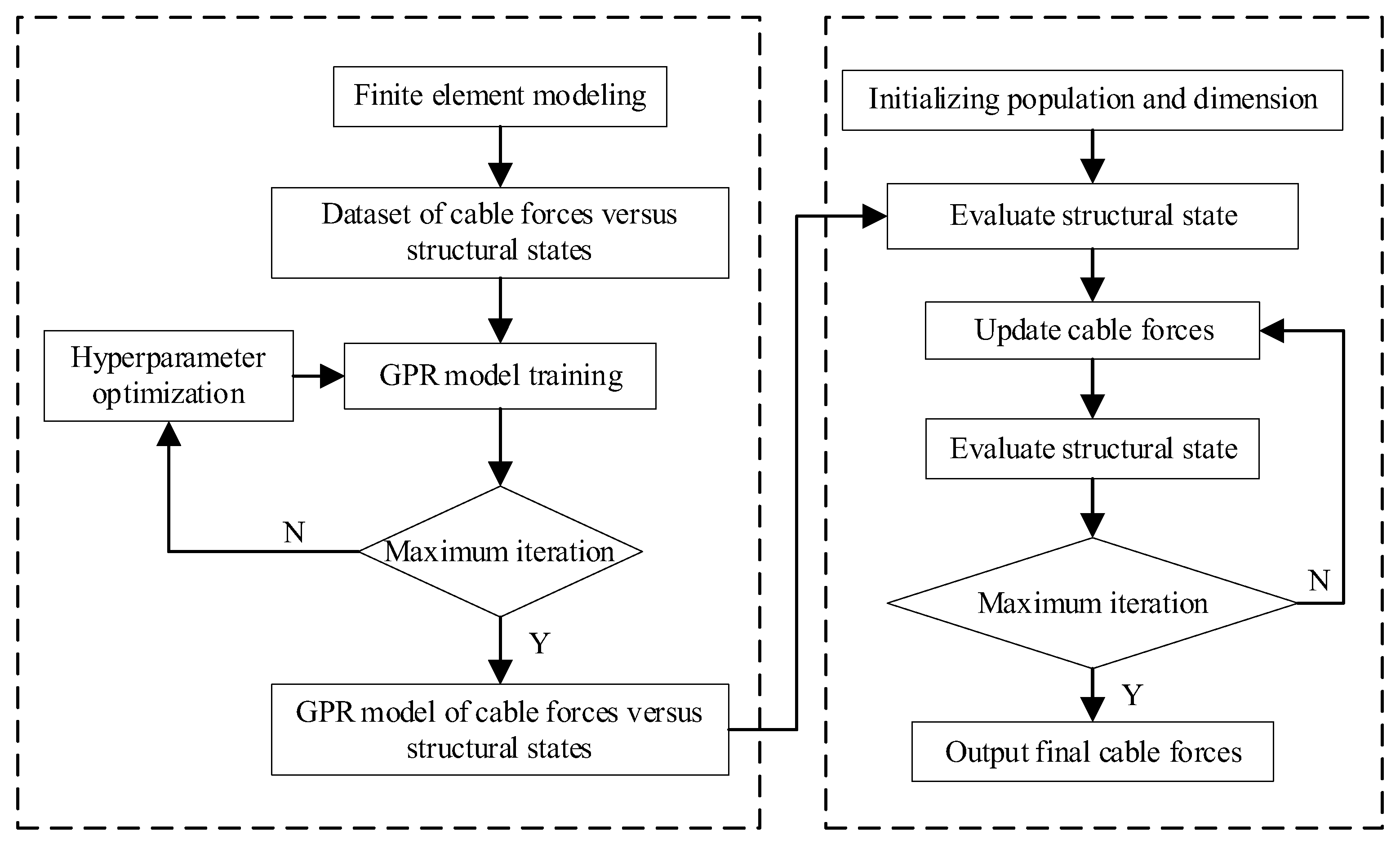
3.2. Optimization Process
- Phase 1: GPR Model Development. Initially, a GPR model is established that correlates cable forces with bending strain energy. Sample points for cable forces are selected using Latin hypercube sampling, ranging from initial to design cable force values. Corresponding bending strain energy values are calculated through finite element analysis, creating a comprehensive dataset. This dataset is then used to train the GPR model, with its hyperparameters optimized by applying the EWOSSA to maximize the likelihood function.
- Phase 2: Cable Force Optimization. Following model development, the cable forces are optimized based on the established GPR model. The EWOSSA is employed to identify the cable force combination that minimizes bending strain energy. This approach enables efficient determination of optimal cable forces without requiring extensive computational resources.
4. Case Study
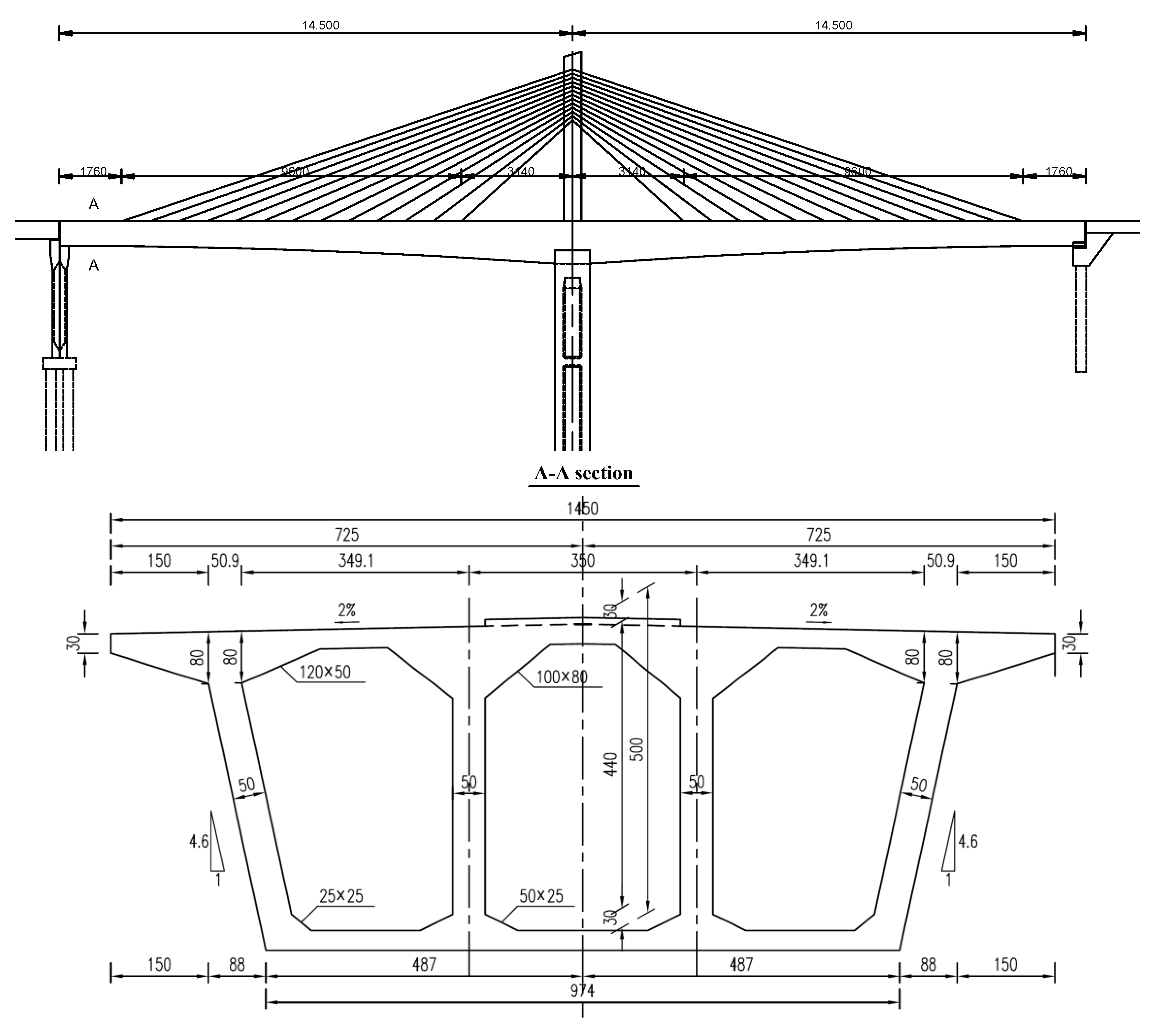
4.1. Bridge Configuration and Structural Characteristics
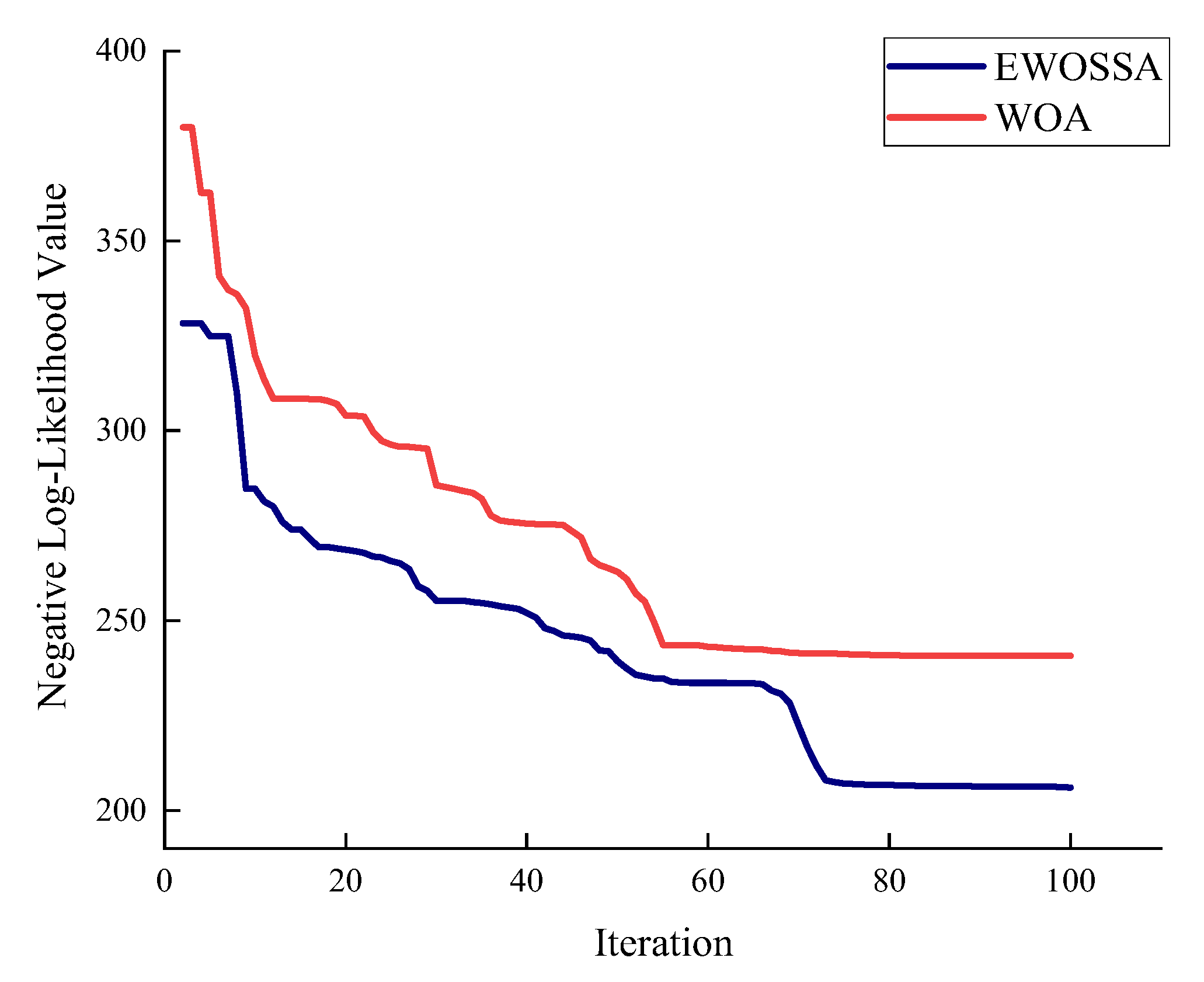
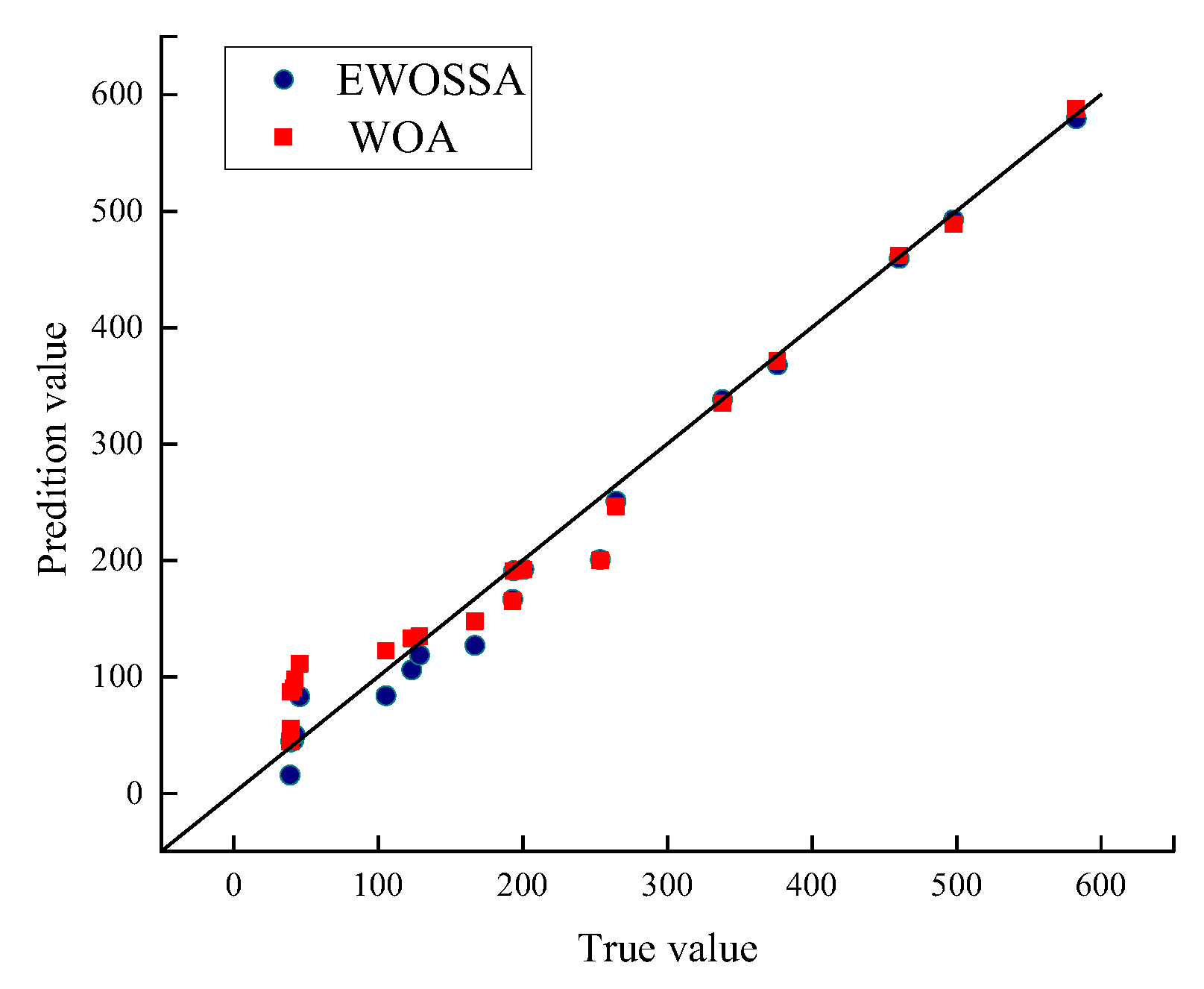
4.2. The GPR Model for Cable Forces–Bending Strain Energy
4.3. Comparative Analysis of Cable Force Optimization Using EWOSSA-GPR
4.3.1. Description of Benchmark Methods
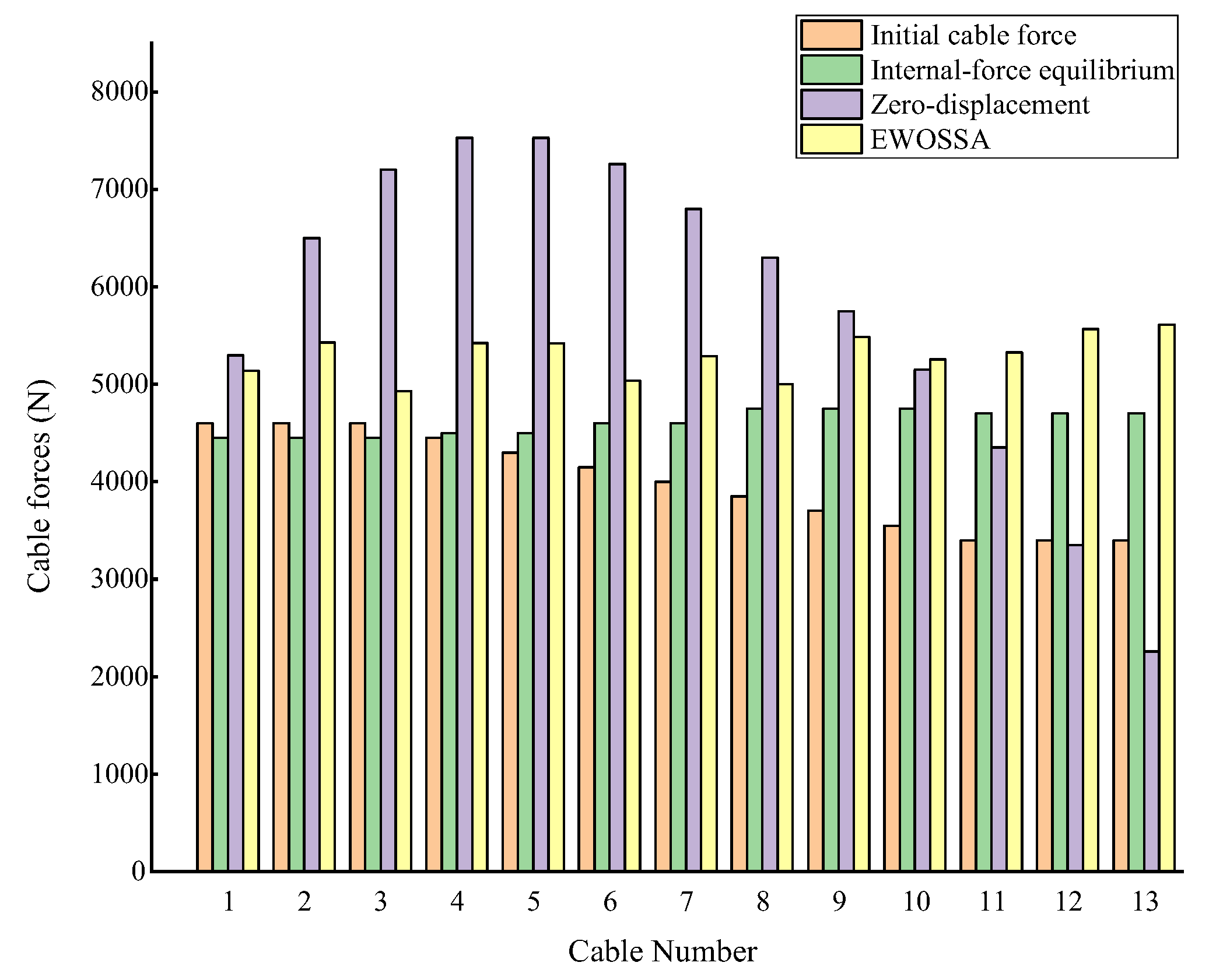
4.3.2. Cable Force Uniformity
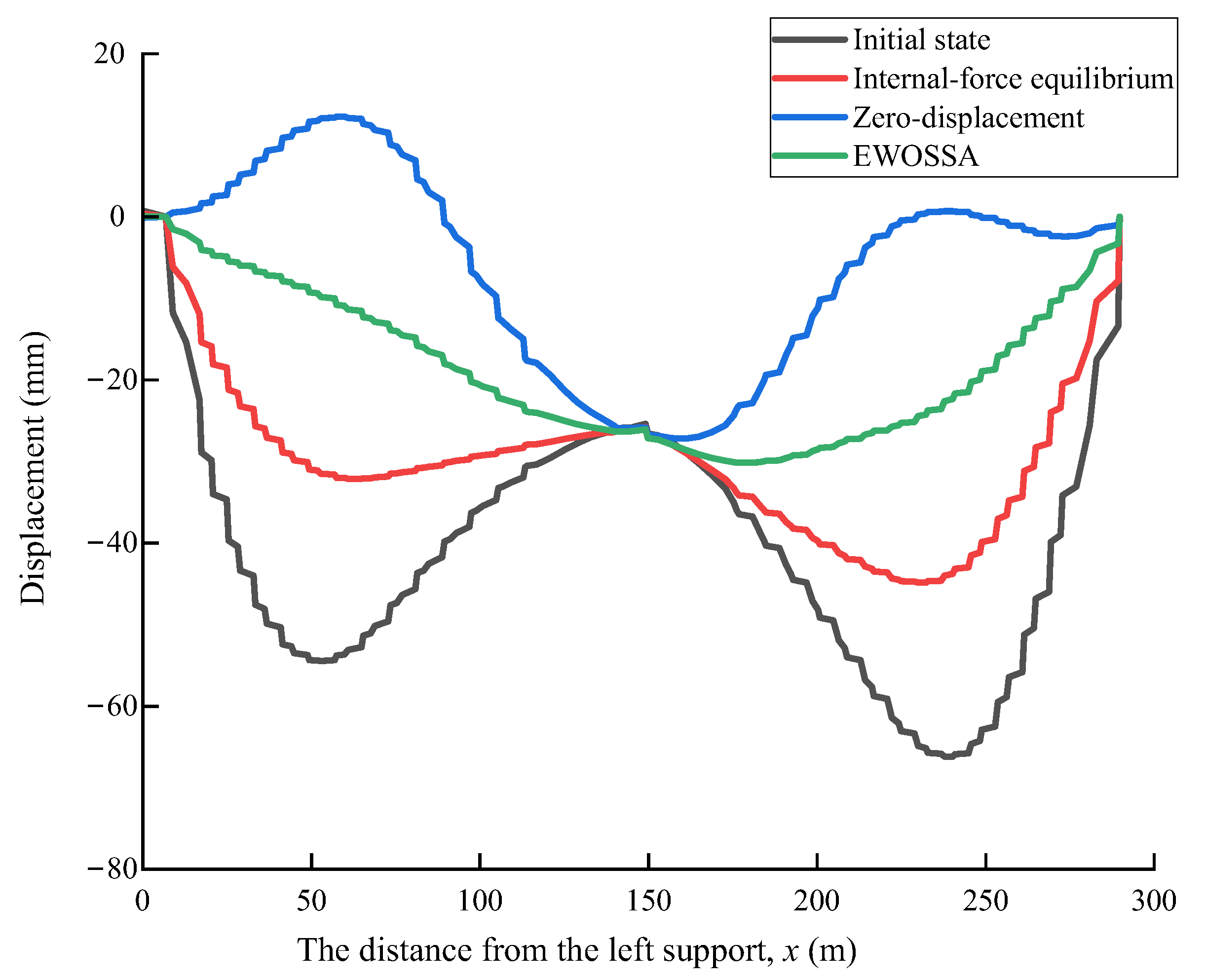
4.3.3. Main Girder Displacement
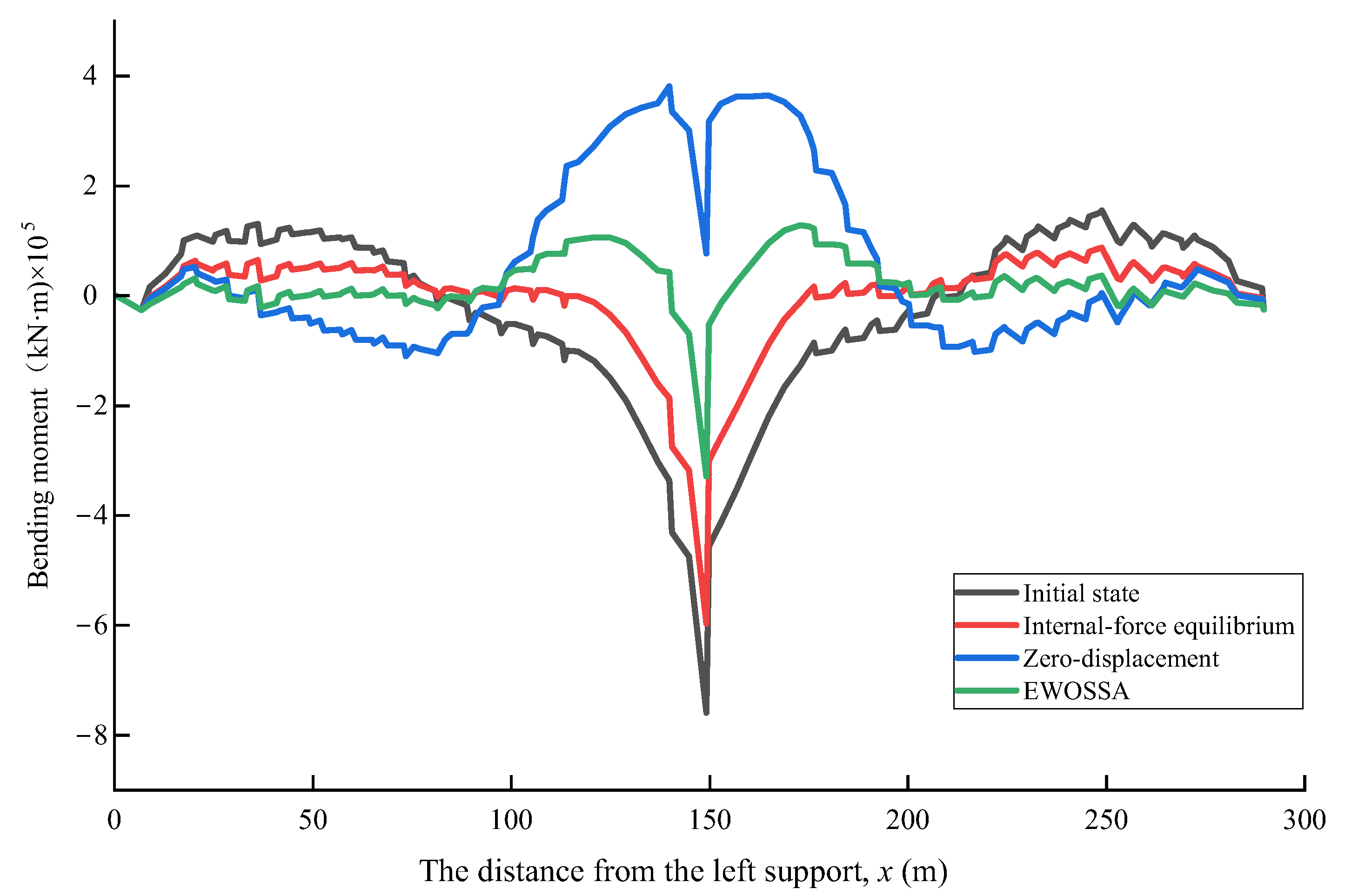
4.3.4. Main Girder Bending Moments
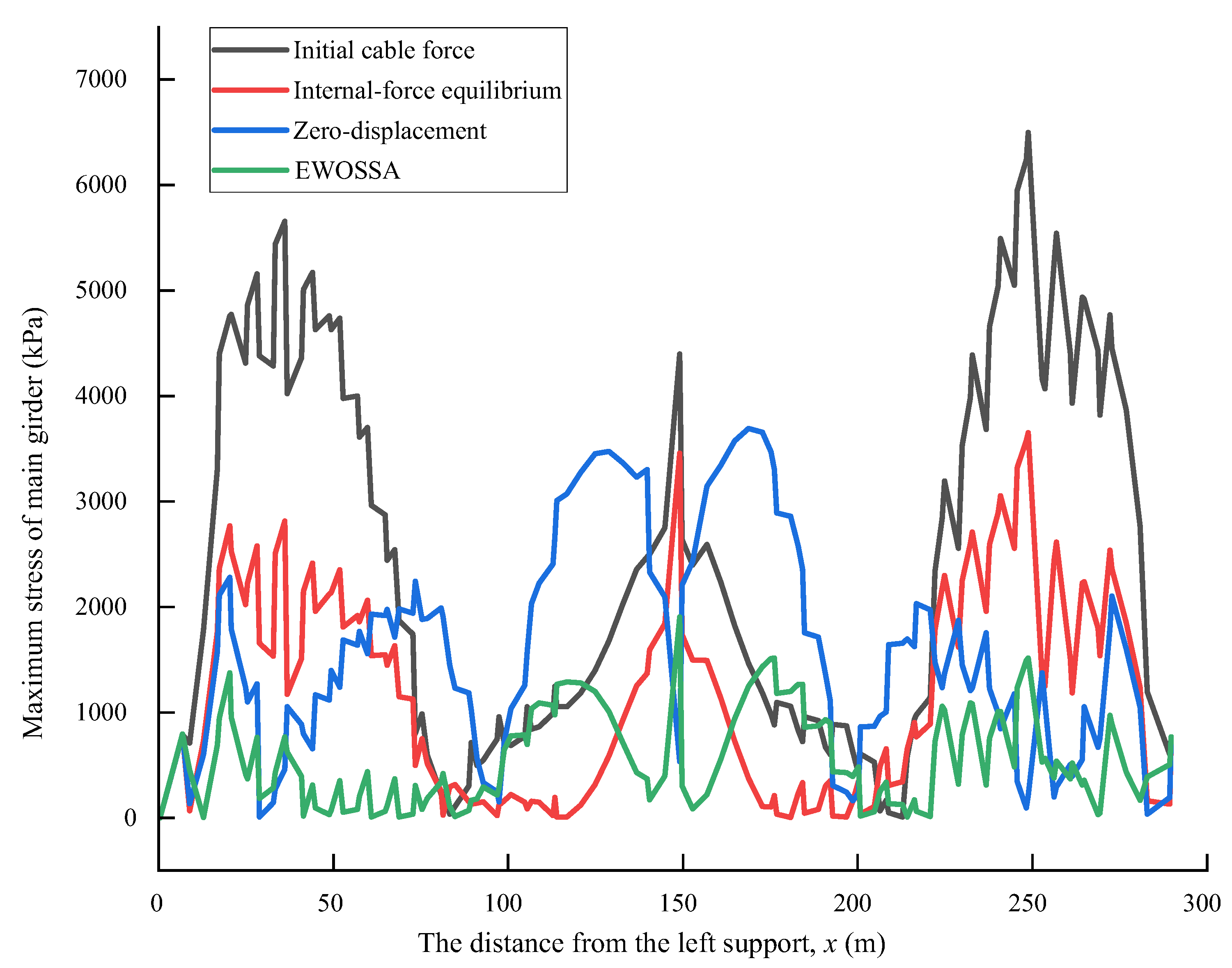
4.3.5. Maximum Stress in Main Girder
4.4. Analysis of the EWOSSA-GPR Framework’s Superiority
5. Conclusions
- The EWOSSA-GPR model demonstrates superior predictive capabilities compared to a standard WOA-GPR model. It proves more effective in capturing the complex, nonlinear relationship between cable forces and the resulting structural state (including displacements, moments, and stresses) of the cable-stayed bridge.
- Established cable force optimization methods, specifically the internal-force equilibrium and zero-displacement methods, show effectiveness in specific areas. The internal-force equilibrium method significantly improves cable force uniformity (77.7% improvement) and reduces maximum positive bending moments (43.8% reduction). However, its impact on other critical metrics, such as minimizing maximum girder displacement or maximum negative bending moments, remains less substantial. Conversely, the zero-displacement method excelled at reducing girder deflection, achieving a 58.9% decrease in maximum displacement and an 89.1% decrease in mean displacement. Yet, this comes at the cost of reduced cable force uniformity and a less favorable bending moment distribution.
- In contrast to the specialized outcomes of traditional methods, the EWOSSA-GPR approach provides a more balanced optimization performance across multiple structural response metrics. While yielding results for girder displacement and bending moments comparable in magnitude to those from traditional methods, the EWOSSA-GPR method demonstrated a key advantage by considering various aspects of the bridge’s structural state concurrently, offering a more holistic optimization outcome rather than excelling in one area while potentially compromising others.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dai, J.; Qin, F.J.; Di, J.; Chen, Y.R. A review of the optimization methods for the cable forces of cable-stayed bridges in the completed state. China J. Highw. Transp. 2019, 32, 17–37. [Google Scholar] [CrossRef]
- Ristic, J.; Ristic, D.; Behrami, R.; Hristovski, V. Adaptive seismic upgrading of isolated bridges with c-gapped devices: Model testing. Civ. Eng. J. 2024, 10, 2761–2780. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, J.; Jing, W.; Zhang, W. Vibration control of corrugated steel web box girder bridge with friction pendulum isolation. Civ. Eng. J. 2024, 10, 3122–3136. [Google Scholar] [CrossRef]
- Zhang, W.; Lin, J.; Huang, Y.; Lin, B.; Liu, X. Experimental and numerical studies on flexural performance of composite beams under cyclic loading. Structures 2024, 70, 107728. [Google Scholar] [CrossRef]
- Yang, Y.; Lin, B.; Zhang, W. Experimental and numerical investigation of an arch–beam joint for an arch bridge. Arch. Civ. Mech. Eng. 2023, 23, 101. [Google Scholar] [CrossRef]
- Lam, P.L.; Kang, T.H.K. Effects of tensioning forces on the structural behavior of cable-stayed bridges. Steel Compos. Struct. 2022, 43, 457–464. [Google Scholar] [CrossRef]
- Asgari, B.; Osman, S.A.; Adnan, A.B. Optimization of pre-tensioning cable forces in highly redundant cable-stayed bridges. Int. J. Struct. Stab. Dyn. 2015, 15, 1540005. [Google Scholar] [CrossRef]
- Martins, A.M.B.; Simões, L.M.C.; Negrão, J.H.O. Optimum design of concrete cable-stayed bridges. Eng. Optim. 2016, 48, 772–791. [Google Scholar] [CrossRef]
- Gimsing, N.J.; Georgakis, C.T. Cable Supported Bridges: Concept and Design, 3rd ed.; John Wiley & Sons: Chichester, UK, 2012. [Google Scholar]
- Wang, P.H.; Tang, T.C.; Yang, C.G. Initial shape of cable-stayed bridges. Comput. Struct. 1993, 46, 1095–1106. [Google Scholar] [CrossRef]
- Chen, D.W.; Au, F.T.K.; Tham, L.G.; Lee, P.K.K. Determination of initial cable forces in prestressed concrete cable-stayed bridges for given design deck profiles using the force equilibrium method. Comput. Struct. 2000, 74, 1–9. [Google Scholar] [CrossRef]
- Sung, Y.C.; Chang, D.W.; Teo, E.H. Optimum post-tensioning cable forces of Mau-Lo Hsi cable-stayed bridge. Eng. Struct. 2006, 28, 1407–1417. [Google Scholar] [CrossRef]
- Martins, A.M.B.; Simões, L.M.C.; Negrão, J.H.O. Optimization of cable-stayed bridges: A literature survey. Adv. Eng. Softw. 2020, 149, 102888. [Google Scholar] [CrossRef]
- Song, C.L.; Xiao, R.C.; Sun, B.; Wang, Z.Y.; Zhang, C. Cable force optimization of cable-stayed bridges: A surrogate model-assisted differential evolution method combined with B-spline interpolation curves. Eng. Struct. 2023, 283, 115893. [Google Scholar] [CrossRef]
- Zhang, W.M.; Zhang, Z.H.; Tian, G.M.; Chang, J.Q. Determining the reasonable completed bridge state of a self-anchored suspension bridge with a spatial cable system based on minimum bending strain energy: An analytical algorithm. J. Bridge Eng. 2023, 28, 04023071. [Google Scholar] [CrossRef]
- Mao, J. Research on the Optimization of the Cable Forces of Cable-Stayed Bridges in the Completed State and the Reasonable Construction State Based on the Influence Matrix Method. Ph.D. Thesis, Jilin University, Changchun, China, 2017. [Google Scholar]
- Hassan, M.M.; Nassef, A.O.; El Damatty, A.A. Surrogate function of post-tensioning cable forces for cable-stayed bridges. Adv. Struct. Eng. 2013, 16, 559–578. [Google Scholar] [CrossRef]
- Zhou, W. Research on the Optimization and Application of the Cable Forces of Cable-Stayed Bridges Considering the Non-Linear Influence of the Influence Matrix. Master’s Thesis, Changsha University of Science and Technology, Changsha, China, 2021. [Google Scholar]
- Wang, D.; Li, Z.; Xiang, S.T.; Tan, B.K. Step-by-step optimization and control of cable force of hybrid composite beam cable-stayed bridges. J. Zhejiang Univ. Technol. 2022, 50, 524–533. [Google Scholar]
- Asgari, B.; Osman, S.A.; Adnan, A. A new multiconstraint method for determining the optimal cable stresses in cable-stayed bridges. Sci. World J. 2014, 2014, 503016. [Google Scholar] [CrossRef] [PubMed]
- Jordan, M.I.; Mitchell, T.M. Machine learning: Trends, perspectives, and prospects. Science 2015, 349, 255–260. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Gong, Z.; Gan, K.; Gan, Y.; Xing, H.; Wang, S. Supervised kernel principal component analysis-polynomial chaos-Kriging for high-dimensional surrogate modelling and optimization. Knowl. Based Syst. 2025, 305, 112617. [Google Scholar] [CrossRef]
- Fang, T.; Hui, Z.; Rey, W.P.; Yang, A.; Liu, B.; Xie, Z. Digital restoration of historical buildings by integrating 3D PC reconstruction and GAN algorithm. J. Artif. Intell. Technol. 2024, 4, 179–187. [Google Scholar] [CrossRef]
- Touil, M.; Bahadi, L.; Elmagri, A. Automatic sleep quality analysis using an artificial intelligence algorithm and EEG signal processing. J. Artif. Intell. Technol. 2024, 4, 153–159. [Google Scholar] [CrossRef]
- Wood, D.A. Spatio-temporal attributes of Varicella-Zoster case number trends assist with optimizing machine learning predictions. Medinformatics 2024, 1, 43–53. [Google Scholar] [CrossRef]
- El Aeraj, O.; Leghris, C. Intrusion detection system based on an intelligent multilayer model using machine learning. J. Artif. Intell. Technol. 2024, 4, 332–341. [Google Scholar] [CrossRef]
- Pant, S.; Ram, M.; Yadav, O. (Eds.) Meta-Heuristic Optimization Techniques: Applications in Engineering; Walter de Gruyter GmbH: Berlin, Germany, 2022; Volume 10. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; IEEE: Piscataway, NJ, USA, 1995; pp. 1942–1948. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; El-Shahat, D.; Sangaiah, A.K. A modified nature inspired meta-heuristic whale optimization algorithm for solving 0-1 knapsack problem. Int. J. Mach. Learn. Cybern. 2019, 10, 495–514. [Google Scholar] [CrossRef]
- Chiaradonna, S.; Di Giandomenico, F.; Murru, N. On enhancing efficiency and accuracy of particle swarm optimization algorithms. Int. J. Innov. Comput. Inf. Control. 2015, 11, 1165–1189. [Google Scholar] [CrossRef]
- Manzoni, L.; Mariot, L.; Tuba, E. Tip the balance: Improving exploration of balanced crossover operators by adaptive bias. arXiv. 2020, arXiv:2008.03369. [Google Scholar] [CrossRef]
- Chen, Z.J.; Liu, Y.; Yang, L.F.; Zhang, S.B. Optimization of stay cable tension of completed bridge of single-pylon cable-stayed bridge based on particle swarm optimization algorithm. Bridge Constr. 2016, 46, 40–44. [Google Scholar]
- Jiang, Z.G.; Zhu, B. Cable force optimization of dissymmetric cable-stayed bridge based on improved particle swarm optimization. Highw. Eng. 2018, 43, 117–121. [Google Scholar]
- Sung, Y.C.; Wang, C.Y.; Teo, E.H. Application of particle swarm optimisation to construction planning for cable-stayed bridges by the cantilever erection method. Struct. Infrastruct. Eng. 2016, 12, 208–222. [Google Scholar] [CrossRef]
- Hassan, M.M. Optimization of stay cables in cable-stayed bridges using finite element, genetic algorithm, and B-spline combined technique. Eng. Struct. 2013, 49, 643–654. [Google Scholar] [CrossRef]
- Hassan, M.M.; Nassef, A.O.; El Damatty, A.A. Determination of optimum post-tensioning cable forces of cable-stayed bridges. Eng. Struct. 2012, 44, 248–259. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; The MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Hittawe, M.M.; Langodan, S.; Beya, O.; Hoteit, I.; Knio, O. Efficient SST prediction in the Red Sea using hybrid deep learning-based approach. In Proceedings of the 2022 IEEE 20th International Conference on Industrial Informatics (INDIN), Perth, WA, Australia, 25–28 July 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar] [CrossRef]
- Tahri, O.; Usman, M.; Demonceaux, C.; Fofi, D.; Hittawe, M. Fast earth mover’s distance computation for catadioptric image sequences. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 101–105. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Tizhoosh, H.R. Opposition-based learning: A new scheme for machine intelligence. In Proceedings of the International Conference on Computational Intelligence for Modelling, Control and Automation, Vienna, Austria, 28–30 November 2005; IEEE: Piscataway, NJ, USA, 2005; Volume 1, pp. 695–701. [Google Scholar] [CrossRef]
- Yu, F.; Li, Y.X.; Wei, B.; Xu, X.; Zhao, Z.Y. The application of a novel OBL based on lens imaging principle in PSO. Acta Electron. Sin. 2014, 42, 230–235. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp swarm algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Yao, X.; Liu, Y.; Lin, G. Evolutionary programming made faster. IEEE Trans. Evol. Comput. 1999, 3, 82–102. [Google Scholar] [CrossRef]
- Zhang, C.; Duan, C.; Sun, L. Inter-storey isolation versus base isolation using friction pendulum systems. Int. J. Struct. Stab. Dyn. 2024, 24, 2450022. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Optimization Method | x | f(x) |
|---|---|---|---|
| f1 | WOA | [0, 0, 0, 0, 0, 0, 0, 0, 0, 0] | 0 |
| SSA | [0, 1, 2, 0, 0, 0, 1, −1, −1, 2] | 11.95 | |
| EWOSSA | [0, 0, 0, 0, 0, 0, 0, 0, 0, 0] | 0 | |
| f2 | WOA | [−301.71, −302.84, −302.72, −303.60, −126.24, −302.81, −300.48, −304.65, −122.34, −301.77] | −3510.35 |
| SSA | [−302.52, −302.53, 65.55, 420.97, 420.97, −302.52, −25.88, 420.97, 203.81, 420.97] | −2867.13 | |
| EWOSSA | [−297.86, −298.67, −305.53, −310.90, −296.90, −298.39, −307.88, −304.27, −300.70, −303.38] | −4187.55 |
| Component | Material | Unit Weight | Elastic Modulus | Poisson’s Ratio |
|---|---|---|---|---|
| Main girder | C60 | 26 | 3.65 × 104 | 0.2 |
| Tower | C50 | 26 | 3.55 × 104 | 0.2 |
| Pier | C40 | 26 | 3.25 × 104 | 0.2 |
| Pile cap | C30 | 26 | 3.0 × 104 | 0.2 |
| Cable | 1860 MPa steel strand | 78.5 | 1.95 × 105 | 0.3 |
| Metric | WOA-GPR | EWOSSA-GPR |
|---|---|---|
| R2 | 0.8596 | 0.9896 |
| MAE | 21.3 | 14.5 |
| RMSE | 29.3 | 20.4 |
| Initial State | Internal-Force Equilibrium | Zero Displacement | EWOSSA-GPR | |
|---|---|---|---|---|
| Mean value (kN) | 4000.00 | 4607.69 | 5790.77 | 5301.00 |
| Standard deviation (kN) | 463.27 | 119.04 | 1596.34 | 209.89 |
| Uniformity coefficient | 0.12 | 0.03 | 0.28 | 0.04 |
| Improvement ratio | - | 77.7% | −138.1% | 65.8% |
| Initial State | Internal-Force Equilibrium | Zero Displacement | EWOSSA-GPR | |
|---|---|---|---|---|
| Maximum displacement (mm) | −66.18 | −44.85 | −27.18 | −30.13 |
| Improvement ratio | - | 32.2% | 58.9% | 54.5% |
| Mean value (mm) | −42.89 | −30.64 | −4.69 | −18.24 |
| Improvement ratio | - | 28.6% | 89.1% | 57.5% |
| Initial State | Internal-Force Equilibrium | Zero Displacement | EWOSSA-GPR | |
|---|---|---|---|---|
| Maximum moment (kN·m) | 154,993.19 | 87,066.66 | 381,408.92 | 128,233.47 |
| Improvement ratio | - | 43.8% | −146.1% | 17.3% |
| Minimum moment (kN·m) | −759,352.56 | −596,710.65 | −110,059.38 | −328,628.29 |
| Improvement ratio | - | 21.4% | 85.5% | 56.7% |
| Mean value (kN·m) | −4641.36 | 6523.81 | 42,127.96 | 20,030.43 |
| Initial State | Internal-Force Equilibrium | Zero Displacement | EWOSSA-GPR | |
|---|---|---|---|---|
| Maximum value (kPa) | 6497 | 3650 | 3694 | 1904 |
| Improvement ratio | - | 43.8% | 43.1% | 70.7% |
| Mean value (kPa) | 2521 | 1241 | 1539 | 596 |
| Improvement ratio | - | 50.8% | 39.1% | 76.4% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tu, B.; Zhang, P.; Cai, S.; Jiao, C. Cable Force Optimization in Cable-Stayed Bridges Using Gaussian Process Regression and an Enhanced Whale Optimization Algorithm. Buildings 2025, 15, 2503. https://doi.org/10.3390/buildings15142503
Tu B, Zhang P, Cai S, Jiao C. Cable Force Optimization in Cable-Stayed Bridges Using Gaussian Process Regression and an Enhanced Whale Optimization Algorithm. Buildings. 2025; 15(14):2503. https://doi.org/10.3390/buildings15142503
Chicago/Turabian StyleTu, Bing, Pengtao Zhang, Shunyao Cai, and Chongyuan Jiao. 2025. "Cable Force Optimization in Cable-Stayed Bridges Using Gaussian Process Regression and an Enhanced Whale Optimization Algorithm" Buildings 15, no. 14: 2503. https://doi.org/10.3390/buildings15142503
APA StyleTu, B., Zhang, P., Cai, S., & Jiao, C. (2025). Cable Force Optimization in Cable-Stayed Bridges Using Gaussian Process Regression and an Enhanced Whale Optimization Algorithm. Buildings, 15(14), 2503. https://doi.org/10.3390/buildings15142503