
A Point Cloud Registration Method for Steel Tubular Arch Rib Segments of CFST Arch Bridges Based on Local Geometric Constraints

Abstract
1. Introduction
2. Methods and Data
2.1. Point Cloud Registration Method for Arch Rib Joints of CFST Arch Bridges Using 3D Laser Scanning
- (1)
- Point cloud preprocessing: Raw point clouds undergo noise removal and preliminary classification to isolate structural features of the arch rib segments.
- (2)
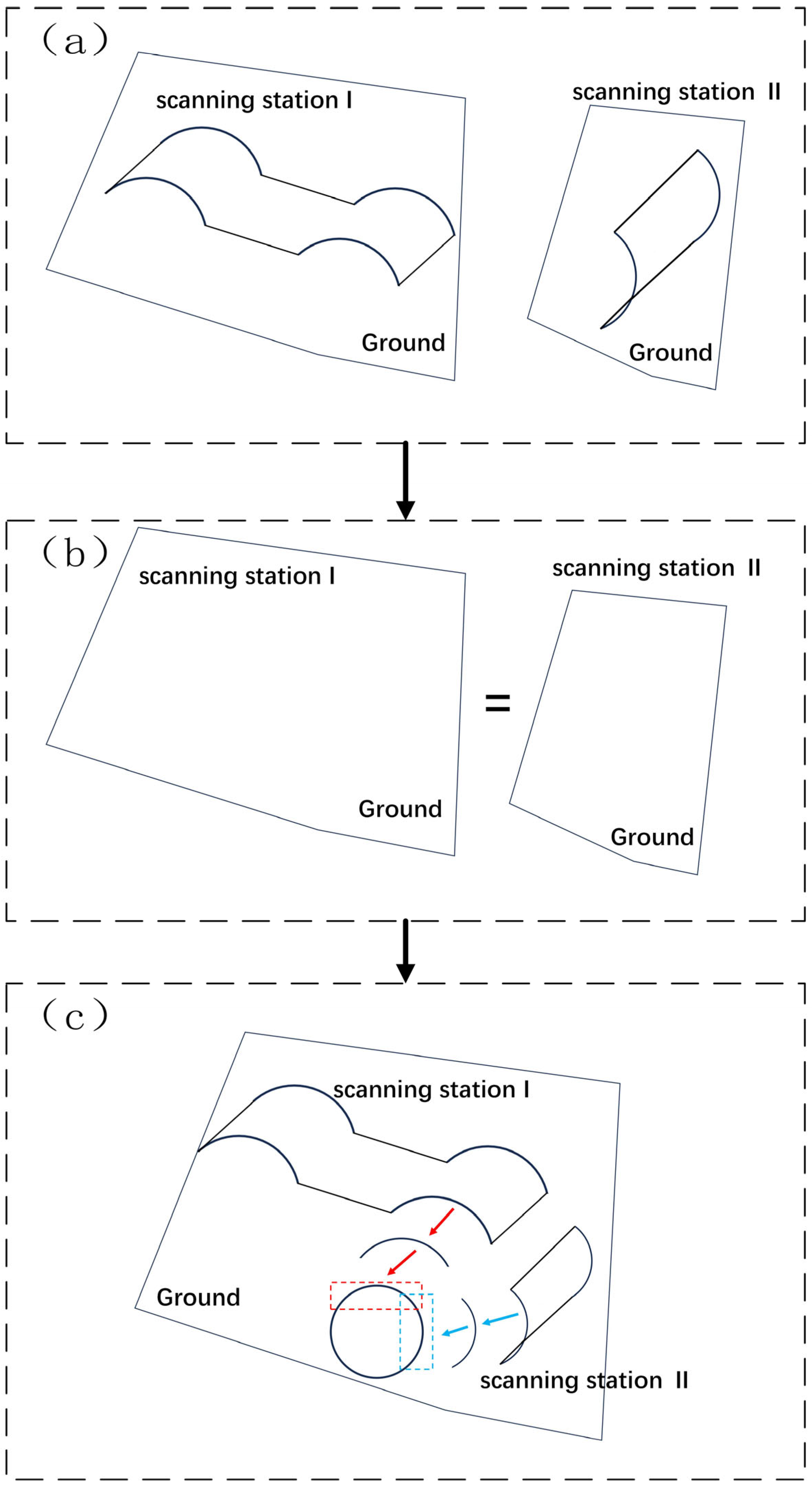
- Coarse registration via equidistant partitioning: A novel equidistant partitioning method is applied to segment the multi-station point clouds. The partitioned sub-clouds exhibit regular circular geometries derived from the tubular joints. These geometric invariants are exploited as positional constraints to align point clouds from different scanning stations.
- (3)
- Fine registration with the CPD algorithm: The coarsely aligned point clouds are further refined using the CPD algorithm. This probabilistic approach iteratively maximizes the spatial coherence between corresponding points, improving registration accuracy.
2.2. Data Preprocessing
- Noise Suppression.Initial denoising employs conventional filtering to eliminate obvious outliers while retaining structural contours. For example, median filtering with a window size of 5 × 5 × 5 voxels is used to remove obvious isolated points, followed by Gaussian filtering with a standard deviation (σ) set to 0.5 to further smooth continuous noise.
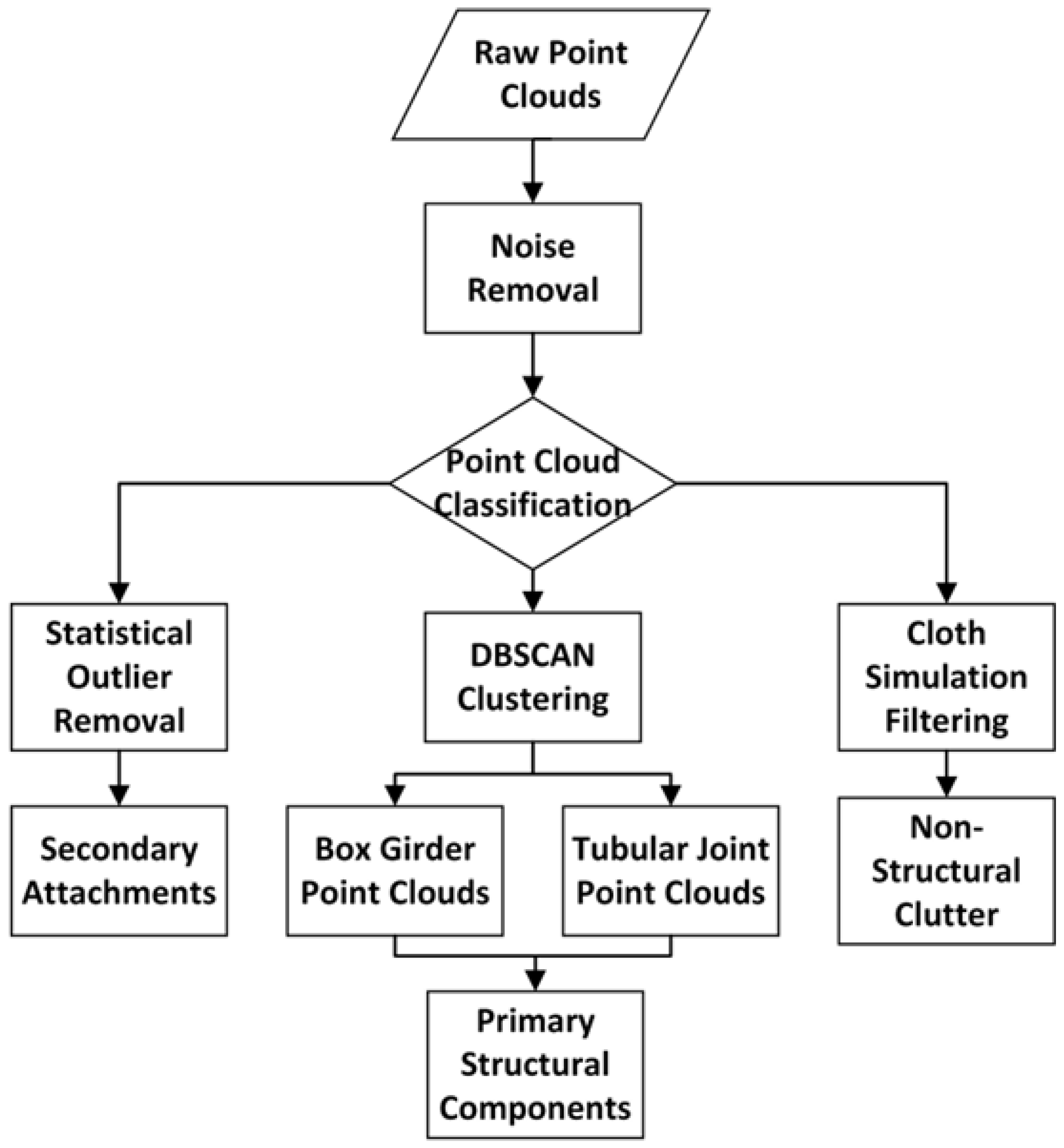
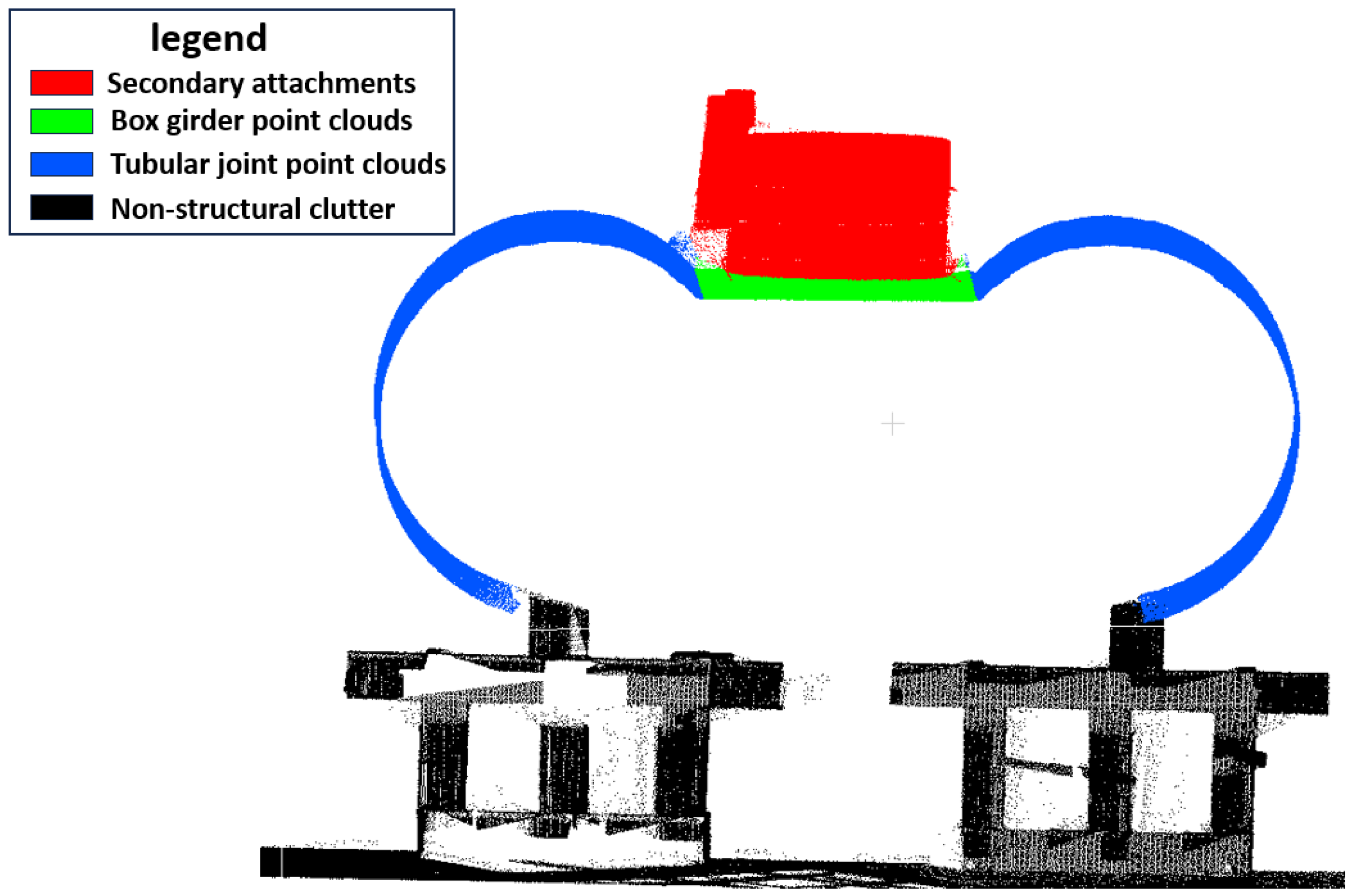
- Component-Wise Classification.The sanitized point cloud undergoes feature-based segmentation into three distinct categories:
- Primary structural components: arch rib segments; box girders.
- Secondary attachments: non-structural elements.
- Non-structural clutter: environmental obstructions (detailed taxonomy shown in Figure 3).
- Feature-Specific Processing.A multi-algorithm cascade ensures optimal treatment for each category:
- a.
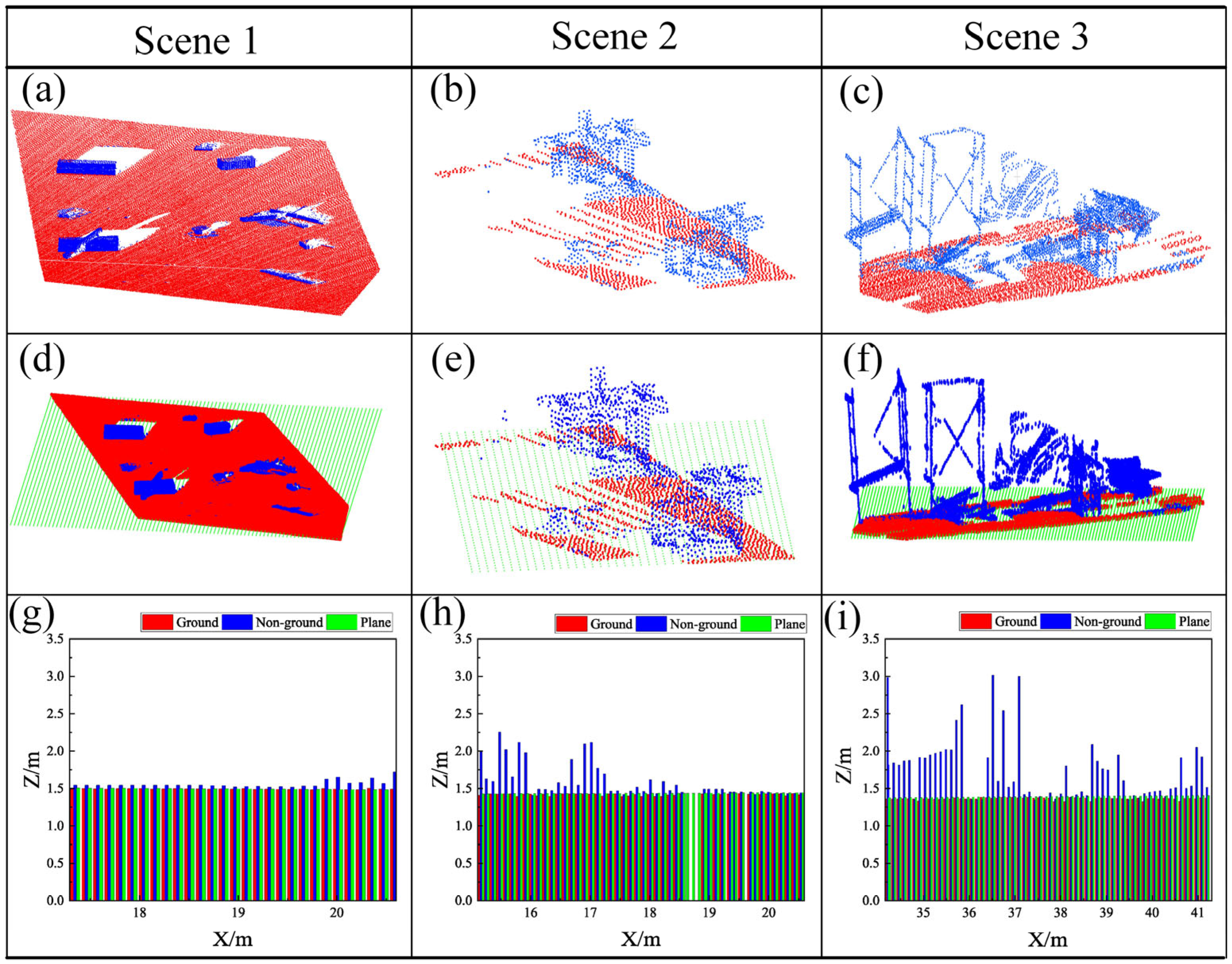
- Cloth Simulation Filtering (CSF) [20]: this physics-based method simulates virtual cloth draping over point cloud surfaces, differentiating the following:
- Structural points (cloth-contacted regions);
- Non-structural points (non-contacted regions).
The process iteratively adjusts cloth deformation to match underlying geometric features. The algorithm assumes structural surfaces exhibit continuous curvature profiles (e.g., cylindrical sections of joints, planar/curved combinations in box girders), while non-structural points demonstrate random spatial distribution. Through simulated tension and gravity effects, the virtual cloth progressively conforms to structural surfaces, with final classification determined by the distance between cloth and points. Specifically, the cloth particle spacing is set to 80 mm, the number of iterations is 30, the gravity parameter is 0.6 N, the tension parameter is 1.2 N/m, and the threshold for cloth-point distance is ≤30 mm. - b.
- Statistical Outlier Removal [21]: Secondary attachments are removed through statistical analysis of neighborhood distance distributions. These elements typically show local clustering with global offsets from primary structures. Points are identified as outliers and removed if their neighborhood distances deviate beyond μ ± 2σ, with the number of neighborhood search points set to K = 100.
- c.
- DBSCAN Clustering [22]: For computationally efficient box girder identification:
- Principal Component Analysis (PCA) reduces dimensionality by projecting 3D points onto dominant planes;
- Density-based clustering in 2D space isolates planar components, with a neighborhood radius ε = 150 mm and a minimum number of points set to 80 (adapted to the planar distribution characteristics of box girder point clouds);
- Height-direction redundancy is eliminated through orthogonal projection.
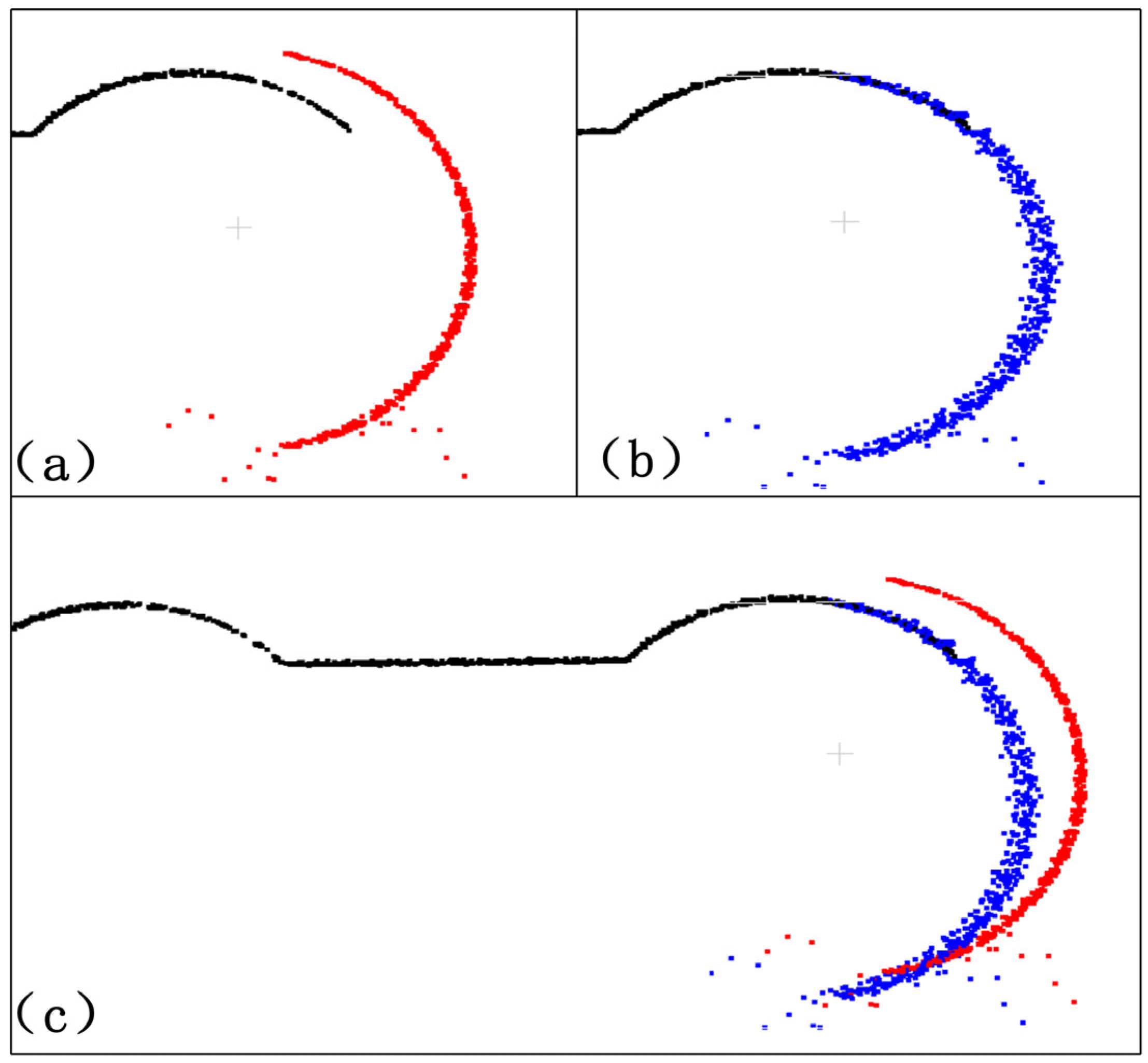
2.3. Coarse Registration
2.3.1. Initial Pose Estimation
- The target point cloud is constrained to lie on the theoretical circular arc (the ideal cross-section of the arch rib segment).
- The source point cloud is aligned with the cylindrical surface defined by the segment’s geometry.
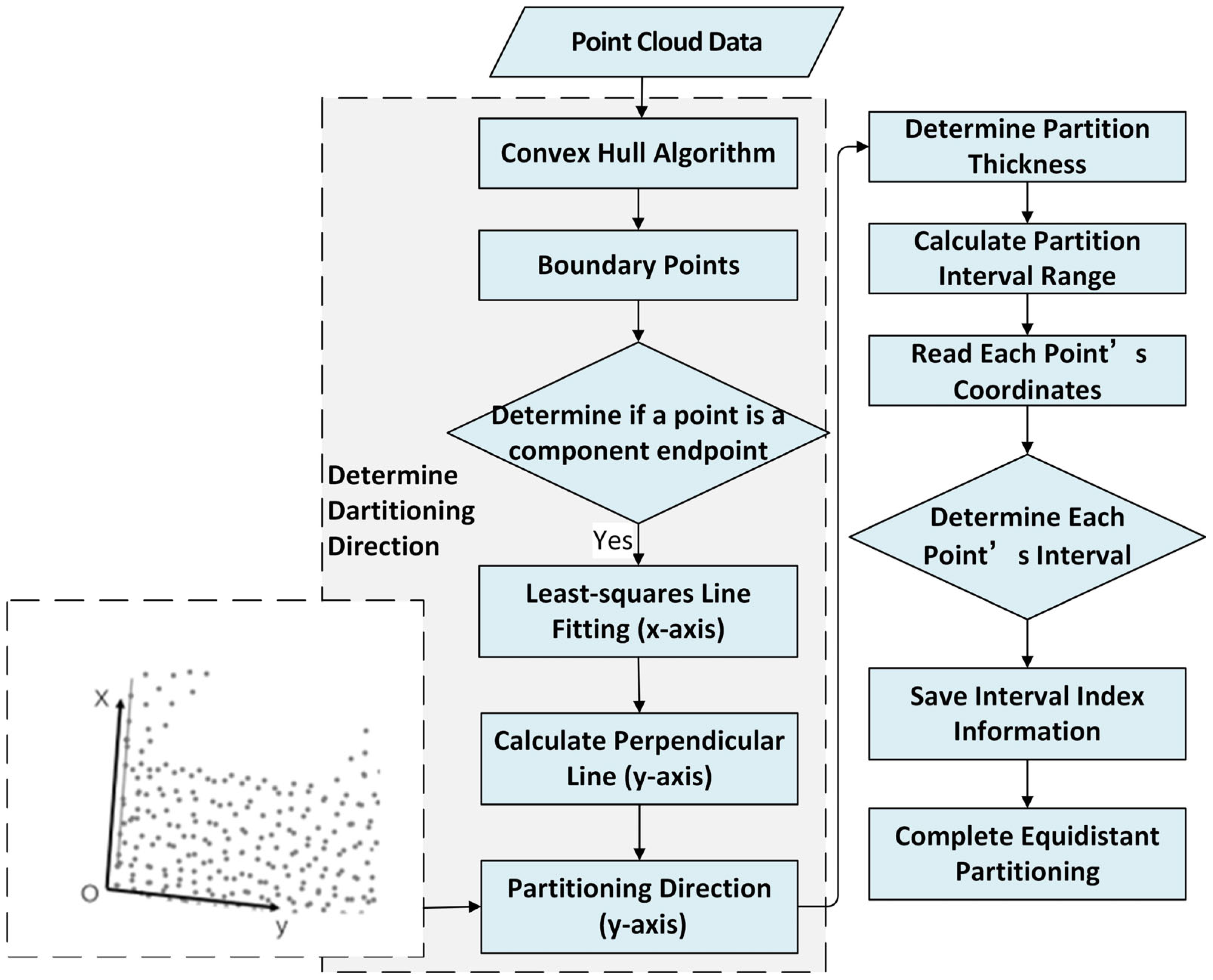
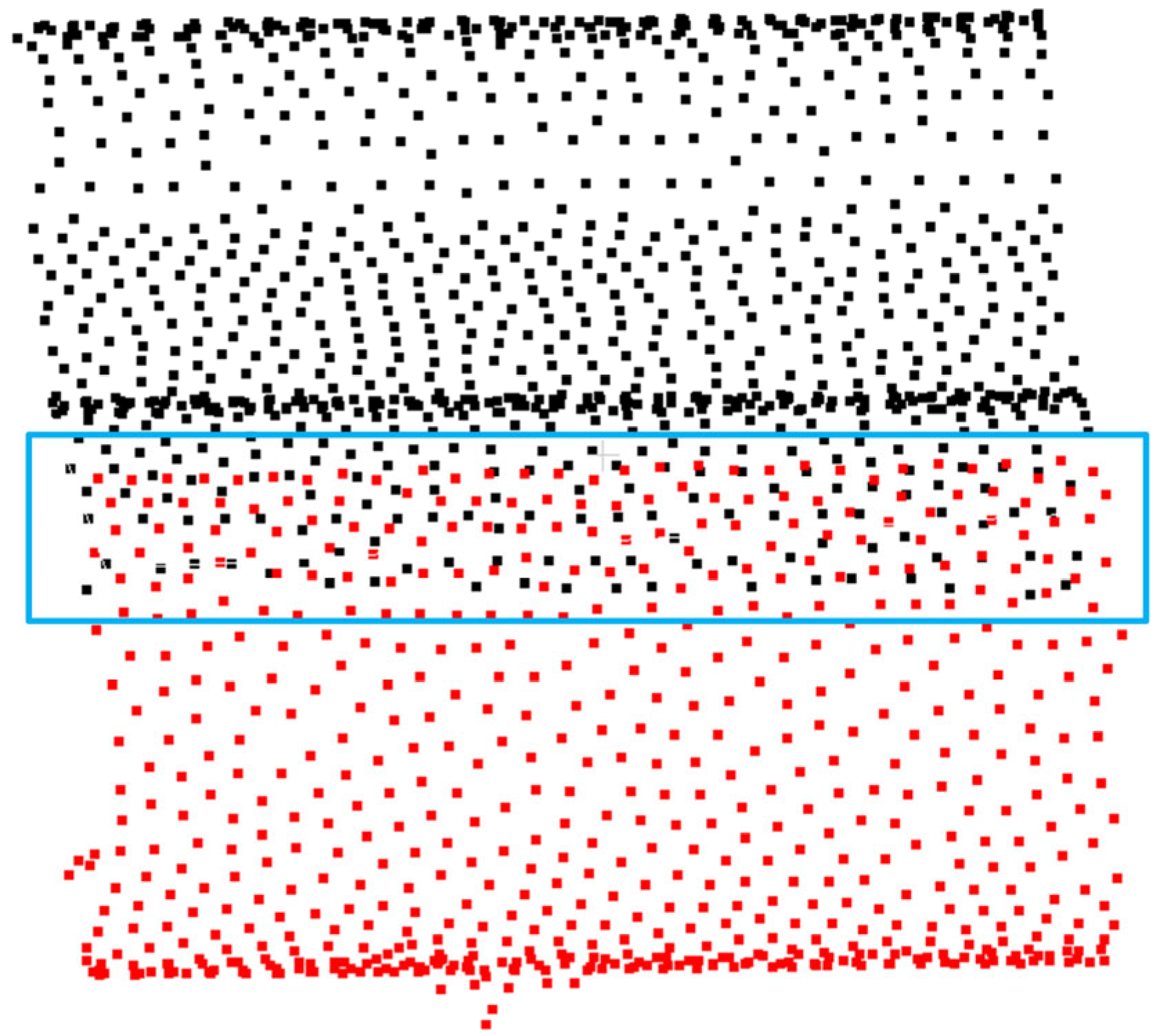
2.3.2. Equidistant Partitioning
- Selecting the leftmost point as the initial vertex;
- Iteratively identifying adjacent points with minimal angular deviation in a counterclockwise direction;
- Terminating when the search loop returns to the starting point.
- Target point clouds are abbreviated as upper clouds.
- Source point clouds are termed lateral clouds.
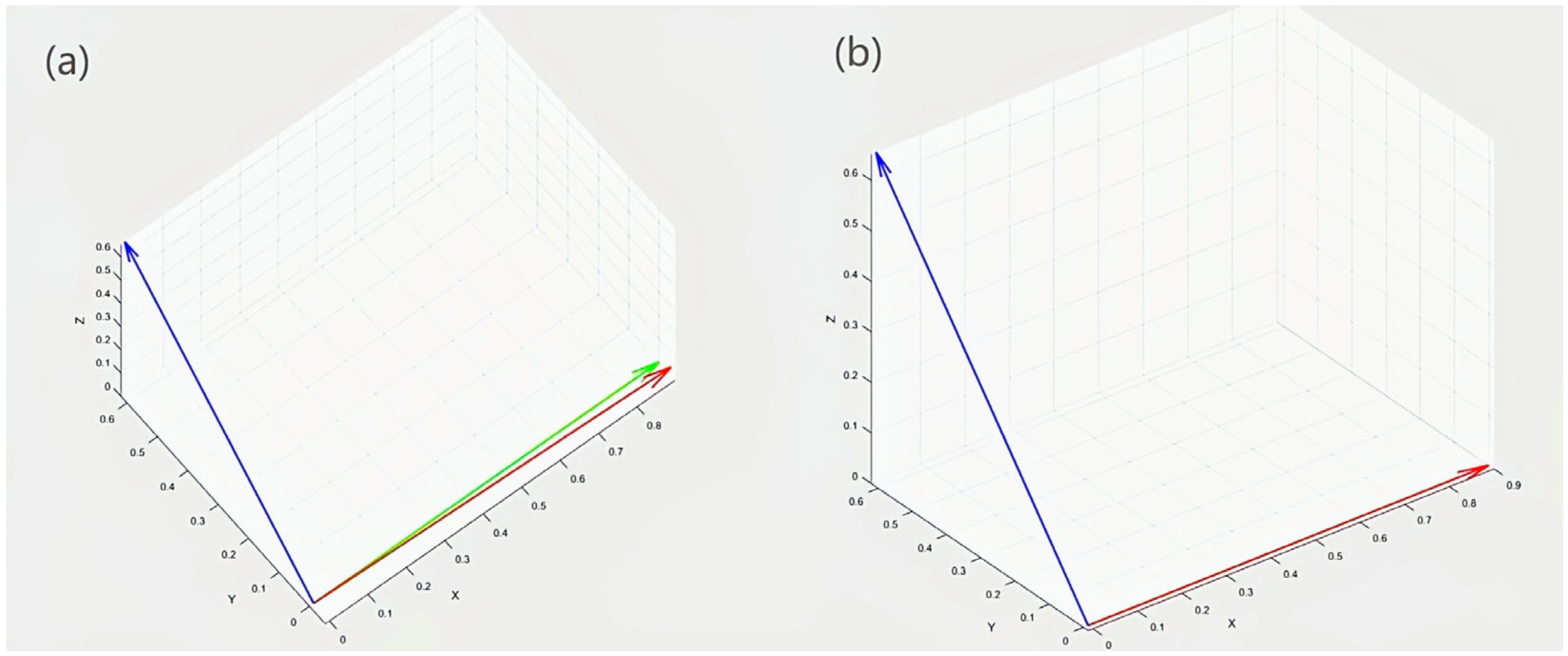
2.3.3. Optimal Projection Plane Calculation
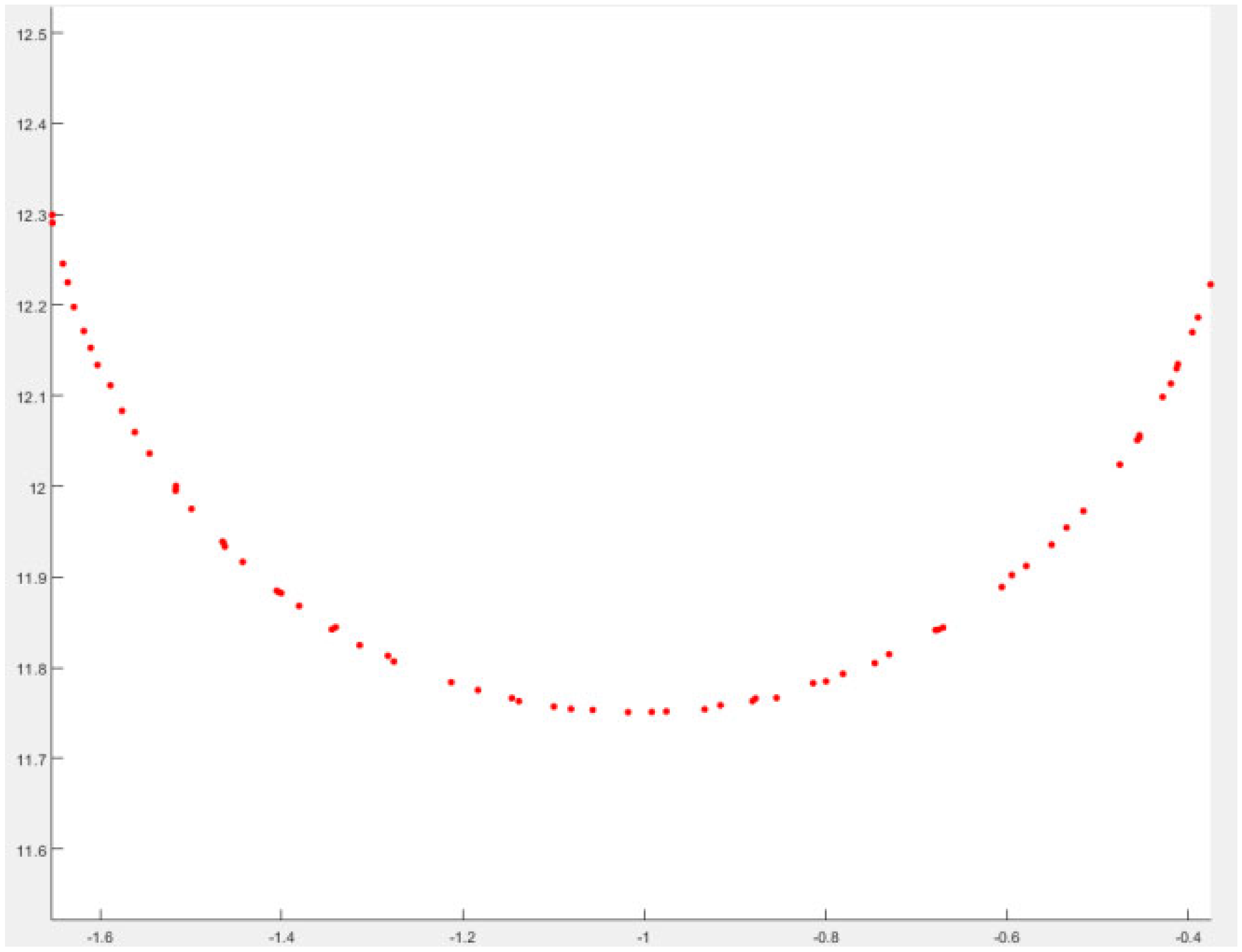
2.3.4. Circle Fitting for Projected Data
- A.
- Initial Value Setting: The centroid of the point cloud, calculated via PCA, is used as the initial center , and the initial radius is set to the average distance from all points to the centroid as Equation (8)
- B.
- Iterative Optimization: In the -th iteration, define the residual functionand then the error function
- C.
- Termination Criterion: The iteration terminates when the norm of the parameter update or the number of iterations exceeds 100.
2.3.5. Rigid Transformation (Rotation and Translation)
- A.
- Rotation Parameter Calculation
- B.
- Applying Rotation Parameters
- C.
- Translation Parameter Calculation
- D.
- Applying Translation Parameters
2.4. Fine Registration
- A.
- Randomly select a point from the source point set .
- B.
- Find the corresponding point in the target point set such that .
- C.
- Calculate R and t to minimize . Compute cross-covariance matrix H.where and are centroid coordinates. Perform singular value decomposition using Formula (28):
- D.
- Transform using and obtained in step C to obtain a new point set: , where in .
- E.
- Calculate the average distance between and its corresponding point in the point set using Formula (30):
- F.
- Set a threshold. Stop the iteration when is less than the threshold; otherwise, return to step B until the condition is met.
3. Experimental Analysis and Discussion
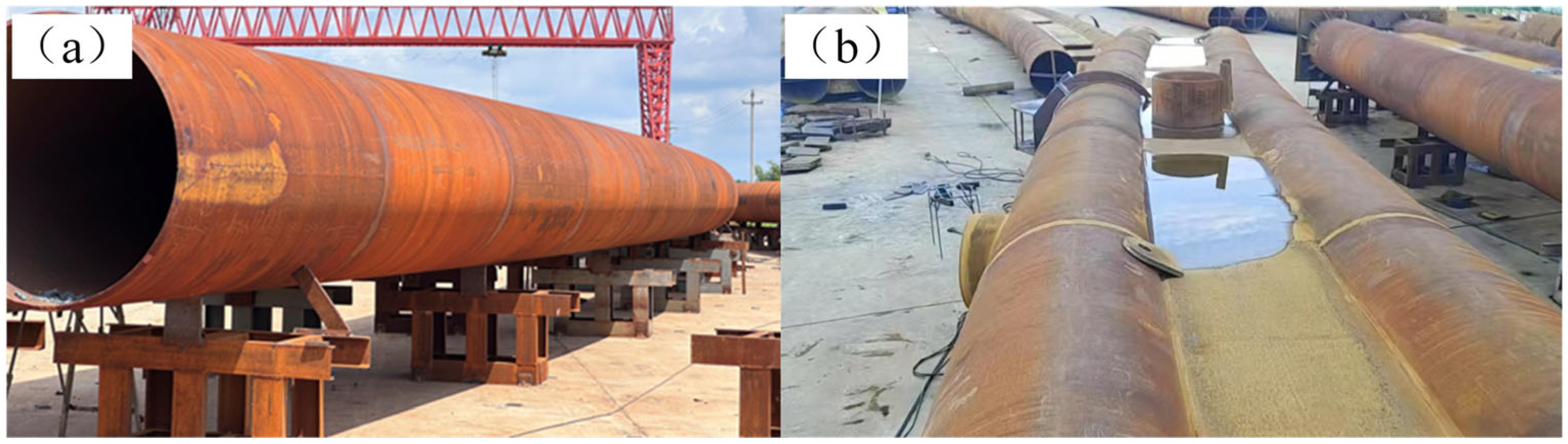
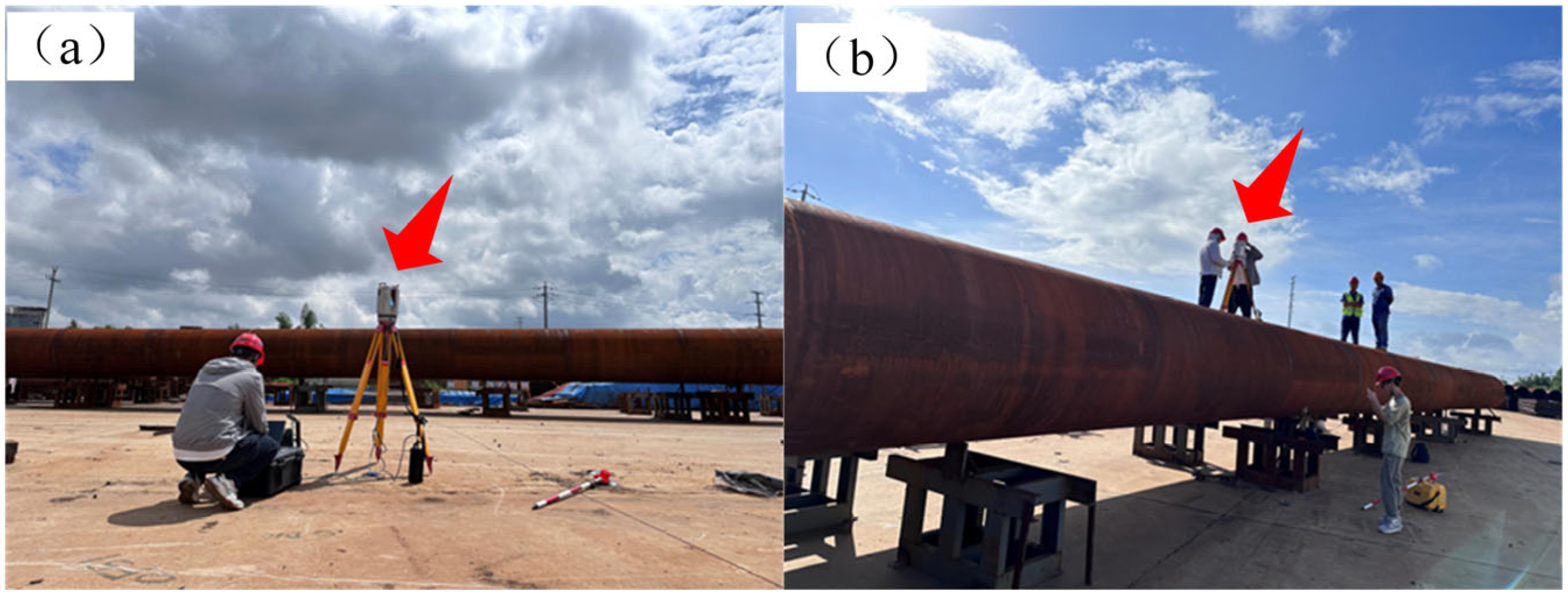
3.1. Experimental Data
3.2. Coarse Registration Accuracy
3.3. Fine Registration Performance Evaluation
4. Conclusions
- A.
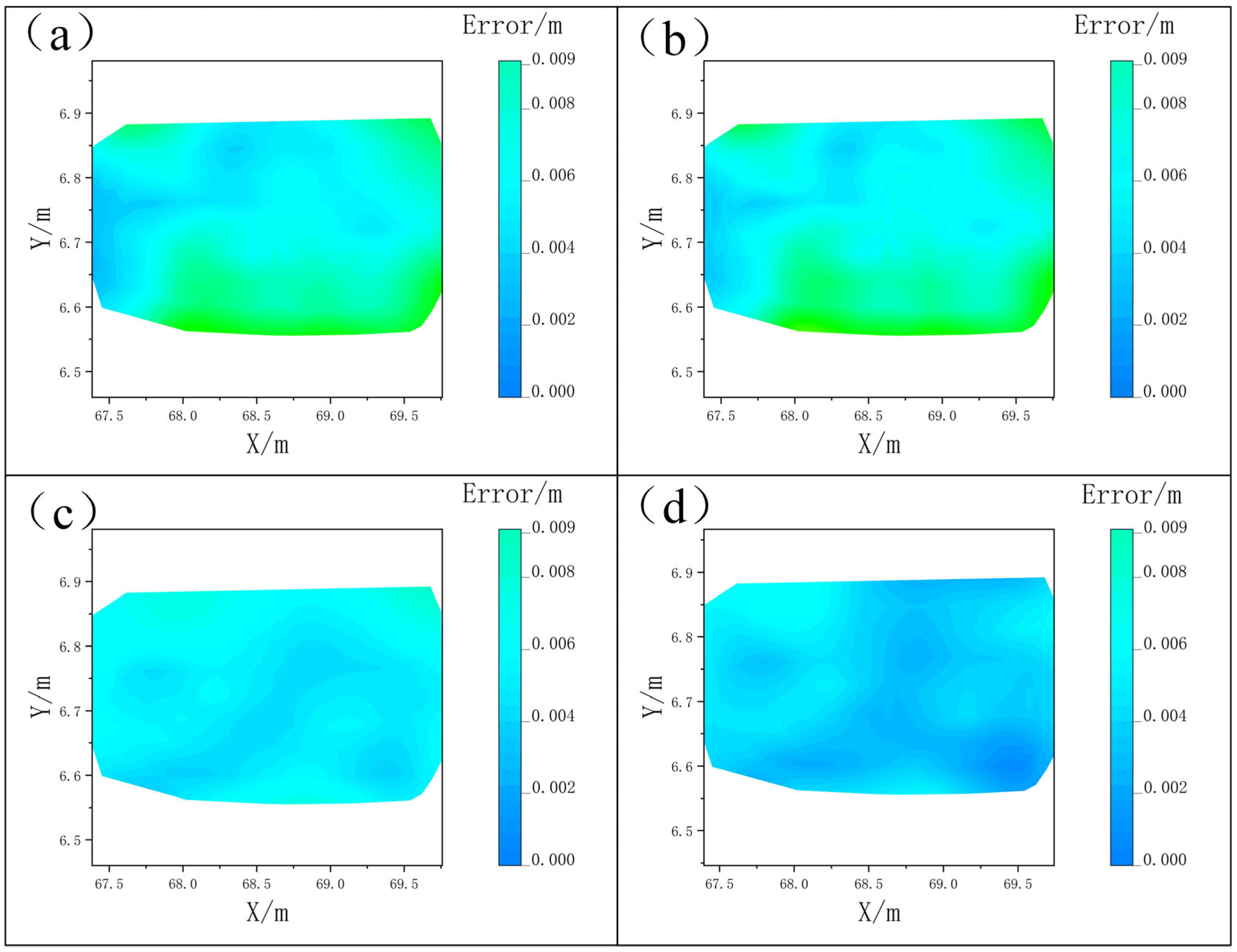
- Coarse Registration Performance: The initial alignment achieves RMSE = 0.031 m with R2 = 0.889, eliminating 88.9% of initial misalignment. Error distribution analysis reveals only 16% of corresponding points reach sub-centimeter accuracy (≤0.004 m), while 84% exhibit registration errors exceeding 0.01 m (Figure 17a).
- B.
- Fine Registration Comparison: Conventional fine registration methods show differentiated performance—NDT reduces RMSE to 0.028 m (9.7% improvement) with R2 = 0.903, while ICP achieves RMSE = 0.018 m (41.9% improvement) and R2 = 0.957. The proposed KD-tree-accelerated CPD method demonstrates superior precision with RMSE = 0.004 m (87% improvement) and R2 = 0.995, leaving merely 0.5% residual error. This represents 3.9% and 10.2% R2 enhancements over ICP and NDT, respectively (Table 1).
- C.
- Error Distribution Characteristics: Post-NDT refinement maintains >80% points with >0.01 m errors (Figure 17b), whereas ICP stabilizes 92% correspondences around 0.005 m (Figure 17c). The CPD algorithm exhibits optimal performance with 95% points converging to 0.004 m and maximum observed error <0.006 m (Figure 17d). Remarkably, it completes computation within 13.30 s, achieving 34.2% acceleration over conventional CPD, confirming its engineering practicality.
- A.
- Theoretical Extension: Generalize the local geometric constraint-based registration theory to broader engineering scenarios (e.g., irregular steel trusses, composite decks).
- B.
- Algorithm Enhancement: Develop adaptive CPD variants incorporating deformation priors for complex structural geometries.
- C.
- Investigation into the Mechanism of Point Cloud Density on Registration Accuracy: The current study does not systematically analyze the quantitative impact of point cloud density distribution (such as edge sparse areas and far-field low-density areas) on registration accuracy. In the future, multi-density downsampling experiments will be conducted, combined with error heatmap visualization techniques, to analyze the error propagation laws in sparse regions.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, J.G.; Wei, J.; Zhou, J.P.; Liu, J. Application of concrete-filled steel tube arch bridges in China: Current status and prospects. China Civ. Eng. J. 2017, 50, 50–61. [Google Scholar]
- Song, Y. Research on Application Maturity of Three—Dimensional Laser Scanning Technology in Building Construction Stage. Master’s Thesis, China University of Mining and Technology, Xuzhou, China, 2022. [Google Scholar]
- Gao, Y. Application Research of 3D Laser Scanning Technology in Slope Monitoring. Master’s Thesis, Chongqing Jiaotong University, Chongqing, China, 2021. [Google Scholar] [CrossRef]
- Luo, B.; Wang, J.; Luo, L.; Guo, Y. Application of backpack 3D laser scanning in urban large scale topographic map survey. Bull. Surv. Mapp. 2024, 187–190+196. [Google Scholar] [CrossRef]
- Arseni, M.; Roman, O.; Cucoara, C.; Georgescu, L.P. Application of Mobile Mapping System for a Modern Topography. J. Appl. Eng. Sci. 2024, 14, 186–193. [Google Scholar] [CrossRef]
- Jia, S.; de Vugt, L.; Mayr, A.; Liu, C.; Rutzinger, M. Location and orientation united graph comparison for topographic point cloud change estimation. ISPRS J. Photogramm. Remote Sens. 2025, 219, 52–70. [Google Scholar] [CrossRef]
- Chen, Y.; Wu, T.; Chen, Z. Error Analysis and Control Based on 3D Laser Scanning Measurement for Large-scale Bridge. Railw. Eng. 2022, 62, 96–100. [Google Scholar]
- Wang, Q.A.; Zhang, C.; Ma, Z.G.; Ni, Y.Q. Modelling and forecasting of SHM strain measurement for a large-scale suspension bridge during typhoon events using variational heteroscedastic Gaussian process. Eng. Struct. 2022, 251, 113554. [Google Scholar] [CrossRef]
- Wang, Q.A.; Dai, Y.; Ma, Z.G.; Wang, J.F.; Lin, J.F.; Ni, Y.Q.; Ren, W.X.; Jiang, J.; Yang, X.; Yan, J.R. Towards high-precision data modeling of SHM measurements using an improved sparse Bayesian learning scheme with strong generalization ability. Struct. Health Monit. 2024, 23, 588–604. [Google Scholar] [CrossRef]
- Behfar, G.; Georgios, B.; Susan, T. Restoration Curves for Infrastructure: Preliminary Case Study on a Bridge in Quebec. Inst. Civ. Eng.-Bridge Eng. 2021, 175, 1–17. [Google Scholar]
- Chang, S. Research on Digital Pre-Assembly Technology of Tubes Based on 3D Laser Scanning Technology. Master’s Thesis, Beijing University of Civil Engineering and Architecture, Beijing, China, 2021. [Google Scholar] [CrossRef]
- Xu, A.; Rao, L.; Fan, G.; Chen, N. Fast and high accuracy 3D point cloud registration for automatic reconstruction from laser scanning data. IEEE Access 2023, 11, 42497–42509. [Google Scholar] [CrossRef]
- Leitenstern, M.; Alten, M.; Bolea-Schaser, C.; Kulmer, D.; Weinmann, M.; Lienkamp, M. FlexCloud: Direct, Modular Georeferencing and Drift-Correction of Point Cloud Maps. arXiv 2025, arXiv:2502.00395. [Google Scholar]
- Ji, J. Research on Registration Method of 3D Laser Scanner in Factory. Master’s Thesis, North China University of Science and Technology, Tangshan, China, 2019. [Google Scholar]
- Yang, J.; Sun, H. Edge feature enhancement and hierarchical attention fusion for low-overlap point cloud registration. J. Image Graph. 2024, 29, 3739–3755. [Google Scholar] [CrossRef]
- Fu, Y.; Chen, P.; Guo, G.; Liu, X. Application of the point cloud registration method based on 4PCS and SICP in rail wear calculation. J. Electron. Meas. Instrum. 2022, 36, 210–218. [Google Scholar] [CrossRef]
- Sun, W.; Yuan, H.; Liu, N.; Liu, Q.; Shu, S. Fast registration algorithm combining contour features for line laser point clouds. J. Electron. Meas. Instrum. 2021, 35, 156–162. [Google Scholar] [CrossRef]
- Liu, R.F.; Wang, F.; Ren, H.W.; Wang, M.; Yang, J. Road scene laser point cloud registration method based on geographical object features. Chin. J. Lasers 2022, 49, 1810002. [Google Scholar]
- ISO 2768-1:1989; General Tolerances—Part 1: Tolerances for Linear and Angular Dimensions Without Individual Tolerance Indications. International Organization for Standardization: Geneva, Switzerland, 1989.
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Walfish, S. A review of statistical outlier methods. Pharm. Technol. 2006, 30, 82. [Google Scholar]
- Schubert, E.; Sander, J.; Ester, M.; Kriegel, H.P.; Xu, X. DBSCAN revisited, revisited: Why and how you should (still) use DBSCAN. ACM Trans. Database Syst. (TODS) 2017, 42, 1–21. [Google Scholar] [CrossRef]
- Li, P.; Wang, J.; Zhao, Y.; Wang, Y.; Yao, Y. Improved algorithm for point cloud registration based on fast point feature histograms. J. Appl. Remote Sens. 2016, 10, 045024. [Google Scholar] [CrossRef]
- Li, Y.; Fei, R.; Zhang, T. An Improved Semi-Dense Iterative Closest Point Registration Algorithm Fusing Intrinsic Shape Signatures and Curvature Feature. In Proceedings of the 2024 International Conference on Intelligent Computing and Robotics (ICICR), Dalian, China, 12–14 April 2024; IEEE: Beijing, China, 2024; pp. 78–82. [Google Scholar]
- Deng, B.; Yao, Y.; Dyke, R.M.; Zhang, J. A survey of non-rigid 3D registration. Comput. Graph. Forum 2022, 41, 559–589. [Google Scholar] [CrossRef]
- Keller, W.; Borkowski, A. Thin plate spline interpolation. J. Geod. 2019, 93, 1251–1269. [Google Scholar] [CrossRef]
- Chen, W.; Liu, J.; Yang, H.; Pang, F.; Zhao, H.; Zhang, R. Aircraft Blade Point Cloud Registration Based on Surface Edge Extraction. Appl. Laser 2024, 44, 196–203. [Google Scholar] [CrossRef]
- Dai, J.S. Euler–Rodrigues formula variations, quaternion conjugation and intrinsic connections. Mech. Mach. Theory 2015, 92, 144–152. [Google Scholar] [CrossRef]
- Xu, Z.; Dong, L.; Wu, J. LiDAR point cloud registration with improved ICP algorithm. Bull. Surv. Mapp. 2024, 1–5. [Google Scholar]
- Myronenko, A.; Song, X. Point set registration: Coherent point drift. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 2262–2275. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y. CPD Algorithm for Registration Based on Feature Point Detection. Electron. Technol. 2018, 47, 14–16. [Google Scholar]
- Calò, M.; Ruggieri, S.; Doglioni, A.; Morga, M.; Nettis, A.; Simeone, V.; Uva, G. Probabilistic-based assessment of subsidence phenomena on the existing built heritage by combining MTInSAR data and UAV photogrammetry. Struct. Infrastruct. Eng. 2024, 1–16. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | RMSE | Improvement | Time |
|---|---|---|---|
| Coarse registration | 0.031 | - | - |
| NDT | 0.028 | 9.7% | 8.13 s |
| ICP | 0.018 | 41.9% | 12.22 s |
| CPD | 0.004 | 87.0% | 20.21 s |
| CPD (kd-tree) | 0.004 | 87.0% | 13.30 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, Y.; Kang, C.; Liu, J.; Zhou, H. A Point Cloud Registration Method for Steel Tubular Arch Rib Segments of CFST Arch Bridges Based on Local Geometric Constraints. Buildings 2025, 15, 2130. https://doi.org/10.3390/buildings15122130
Lv Y, Kang C, Liu J, Zhou H. A Point Cloud Registration Method for Steel Tubular Arch Rib Segments of CFST Arch Bridges Based on Local Geometric Constraints. Buildings. 2025; 15(12):2130. https://doi.org/10.3390/buildings15122130
Chicago/Turabian StyleLv, Yiquan, Chuanli Kang, Junli Liu, and Hongjian Zhou. 2025. "A Point Cloud Registration Method for Steel Tubular Arch Rib Segments of CFST Arch Bridges Based on Local Geometric Constraints" Buildings 15, no. 12: 2130. https://doi.org/10.3390/buildings15122130
APA StyleLv, Y., Kang, C., Liu, J., & Zhou, H. (2025). A Point Cloud Registration Method for Steel Tubular Arch Rib Segments of CFST Arch Bridges Based on Local Geometric Constraints. Buildings, 15(12), 2130. https://doi.org/10.3390/buildings15122130